Multi-Receiver Vector Tracking
|
|
|
- Daisy Cameron
- 5 years ago
- Views:
Transcription

1 Multi-Receiver Vector Tracking Yuting Ng and Grace Xingxin Gao please feel free to view the.pptx version for the speaker notes
2 Cutting-Edge Applications UAV formation flight remote sensing interference mitigation Network Sync. PMU time voltage/ current Sampling Device synchronized phasor measurements SAR-GNSS Processing 1
3 State-of-the-Art Techniques increased availability EKF VDLL VFLL IMU beamstearing Signal tracking clock Multiple antennas External aiding increased robustness RTK PPP DGPS Multiple receivers 2
4 State-of-the-Art Techniques increased availability EKF VDLL VFLL IMU beamstearing Signal tracking clock Multiple antennas External aiding increased robustness RTK PPP DGPS Multiple receivers 2
5 State-of-the-Art Techniques increased availability EKF VDLL VFLL IMU beamstearing Signal tracking clock Multiple antennas External aiding increased robustness RTK PPP DGPS Multiple receivers Cooperative Navigation Joint Signal Tracking 2


6 Multi-Receiver Vector Tracking Joint tracking of multiple GNSS receivers for increased accuracy, robustness and reliability 3
7 Outline Motivation Coop Nav, Joint Signal Tracking Our Approach Multi-Receiver Vector Tracking Implementation Hardware, Python SDR Experimental Validation Summary
8 MRVT Receiver Architecture incoming raw signal Channel 1... Receiver Channel N Receiver Receiver Network Scheme Scalar SRVT MRVT Entities N x M Channels M Receivers 1 Network Unknowns N x M x 4 M x 8 1 x 14 N Channels M Receivers 4 Unknowns M Receivers 8 Unknowns 1 Network 14 Unknowns 4
 GNSS Receiver measurements /")
 Multi-Receiver Vector")
9 Comparison with other GNSS Processing Implementations Antenna array Differential GPS (DGPS) GNSS Receiver measurements / coordinates Nav Filter GNSS Receiver GNSS Receiver Single-Receiver Vector Tracking (SRVT) Multi-Receiver Vector Tracking (MRVT) 5

10 MRVT Block Diagram 6

11 MRVT Block Diagram 6
12 Single Receiver Vector Tracking Loop EKF-based Filter Vector Delay Lock Loop - James J. Spilker, Jr. Global Positioning System-Theory and Applications, Volumes I, II. AIAA, Washington, DC.,

13 Single Receiver PIA Vector Tracking State Representation Process Noise Cov. 8

14 Single Receiver PIA Vector Tracking State Representation Process Noise Covariance Matrix σ 2 σ 2 9

15 MRVT Block Diagram 10

16 MRVT Loop 11
17 MRVT Variations MRVT Enforce baseline, attitude and velocity constraints Enforce timing constraints MRPIAVT Enforce timing constraints clock bias differ by constant clock drift same 12
18 Multi-Receiver Vector Tracking Receiver Network Channel Receiver LOS Projections Code and Carrier NCO EKF incoming GPS signal Correlator Code and Carrier Discriminators Time Update Measurement Update MRVT Filter navigation solution a priori information 13
19 Outline Motivation Coop Nav, Joint Signal Tracking Our Approach Multi-Receiver Vector Tracking Implementation Hardware, Python SDR Experimental Validation Summary


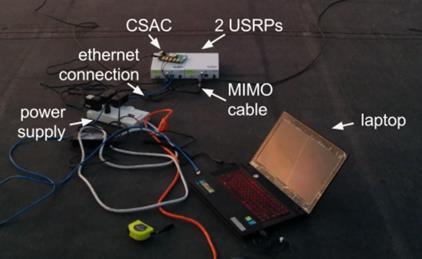

20 Overall Implementation GNSS antennas ADCs Network Receiver Hardware Software (Python SDR) 4.60m 14
 OOP (Object-Oriented Programming)")
21 Python SDR : Research Platform Share information effectively SDR (Software Defined Radio) OOP (Object-Oriented Programming) 15


22 Python SDR : Research Platform 16


23 Python SDR : Teaching Platform 17


24 Python SDR : Teaching Platform 17
25 Outline Motivation Coop Nav, Joint Signal Tracking Our Approach Multi-Receiver Vector Tracking Implementation Hardware, Python SDR Experimental Validation Summary

26 MRVT Positioning Results SRVT MRVT SRVT zoomed in MRVT zoomed in 18

27 MRVT Positioning Results SRVT MRVT SRVT zoomed in MRVT zoomed in 18
28 MRVT Results: Reliable Altitudes 19

29 MRVT Results: Accurate Baselines 19
30 MRVT Results: Less Noisy Speeds 19

31 Results with Buildings+Accelerations SRVT MRVT 20


32 Results with Buildings+Accelerations SRVT zoomed in MRVT zoomed in 20
33 MRPIAVT Results: Improved Timing Accuracy SRVT MRPIAVT 21

34 MRPIAVT Results: Improved Timing Accuracy SRVT MRPIAVT 21

35 MRPIAVT: Resistant to Jamming Added noise of different levels Clock bias comparison across different noise power Clock drift comparison across different noise power 22
 clock bias clock drift state error cov")

36 MRPIAVT: Robust to Meaconing weak meaconing (1:1 power ratio) clock bias clock drift state error cov robust to attack strong meaconing (100:1 power ratio) clock bias clock drift state error cov attack detected 23


37 MRPIAVT: Detects Data Spoofing Attacked af 0 in Subframe 1 of Ephemerides satellite clock biases shifted by 4s clock bias clock drift state error cov attack detected 24
38 Outline Motivation Coop Nav, Joint Signal Tracking Our Approach Multi-Receiver Vector Tracking Implementation Hardware, Python SDR Experimental Validation Summary
39 Summary Proposed Multi-Receiver Vector Tracking (MRVT) Cooperative navigation Joint signal tracking Designed MRVT Architecture Implemented in Python SDR Conducted MRVT Experiments Validated Performance Improvements MRVT : Demonstrated increased accuracy in horizontal heading, altitudes, baselines, speeds, timing MRPIAVT : Demonstrated improved timing accuracy and precision, robustness against timing attacks 25




40 From all of Thank you!
Multi-Receiver Vector Tracking Based on a Python Platform
 Multi-Receiver Vector Tracking Based on a Python Platform Yuting Ng and Grace Xingxin Gao University of Illinois at Urbana-Champaign BIOGRAPHY Yuting Ng is a Master's student in the Aerospace Engineering
Multi-Receiver Vector Tracking Based on a Python Platform Yuting Ng and Grace Xingxin Gao University of Illinois at Urbana-Champaign BIOGRAPHY Yuting Ng is a Master's student in the Aerospace Engineering
Advanced Multi-Receiver Position-Information-Aided Vector Tracking for Robust GPS Time Transfer to PMUs
 Advanced Multi-Receiver Position-Information-Aided Vector Tracking for Robust GPS Time Transfer to PMUs Yuting Ng and Grace Xingxin Gao University of Illinois at Urbana-Champaign BIOGRAPHIES Yuting Ng
Advanced Multi-Receiver Position-Information-Aided Vector Tracking for Robust GPS Time Transfer to PMUs Yuting Ng and Grace Xingxin Gao University of Illinois at Urbana-Champaign BIOGRAPHIES Yuting Ng
Robust GPS-Based Timing for PMUs Based on Multi-Receiver Position-Information-Aided Vector Tracking
 Robust GPS-Based Timing for PMUs Based on Multi-Receiver Position-Information-Aided Vector Tracking Daniel Chou, Yuting Ng and Grace Xingxin Gao, University of Illinois Urbana-Champaign BIOGRAPHIES Daniel
Robust GPS-Based Timing for PMUs Based on Multi-Receiver Position-Information-Aided Vector Tracking Daniel Chou, Yuting Ng and Grace Xingxin Gao, University of Illinois Urbana-Champaign BIOGRAPHIES Daniel
Improved GPS Carrier Phase Tracking in Difficult Environments Using Vector Tracking Approach
 Improved GPS Carrier Phase Tracking in Difficult Environments Using Vector Tracking Approach Scott M. Martin David M. Bevly Auburn University GPS and Vehicle Dynamics Laboratory Presentation Overview Introduction
Improved GPS Carrier Phase Tracking in Difficult Environments Using Vector Tracking Approach Scott M. Martin David M. Bevly Auburn University GPS and Vehicle Dynamics Laboratory Presentation Overview Introduction
Vector tracking loops are a type
 GNSS Solutions: What are vector tracking loops, and what are their benefits and drawbacks? GNSS Solutions is a regular column featuring questions and answers about technical aspects of GNSS. Readers are
GNSS Solutions: What are vector tracking loops, and what are their benefits and drawbacks? GNSS Solutions is a regular column featuring questions and answers about technical aspects of GNSS. Readers are
Robust GPS-Based Timing for Phasor Measurement Units: A Position-Information- Aided Approach
 Robust GPS-Based Timing for Phasor Measurement Units: A Position-Information- Aided Approach Daniel Chou, Liang Heng, and Grace XingXin Gao, University of Illinois Urbana-Champaign BIOGRAPHIES Daniel Chou
Robust GPS-Based Timing for Phasor Measurement Units: A Position-Information- Aided Approach Daniel Chou, Liang Heng, and Grace XingXin Gao, University of Illinois Urbana-Champaign BIOGRAPHIES Daniel Chou
With billions of GNSSenabled
 INNOVATION Receiver Technology Python GNSS Receiver An Object-Oriented Software Platform Suitable for Multiple Receivers Eliot Wycoff, Yuting Ng, and Grace Xingxin Gao Pull INNOVATION INSIGHTS with Richard
INNOVATION Receiver Technology Python GNSS Receiver An Object-Oriented Software Platform Suitable for Multiple Receivers Eliot Wycoff, Yuting Ng, and Grace Xingxin Gao Pull INNOVATION INSIGHTS with Richard
Utilizing Batch Processing for GNSS Signal Tracking
 Utilizing Batch Processing for GNSS Signal Tracking Andrey Soloviev Avionics Engineering Center, Ohio University Presented to: ION Alberta Section, Calgary, Canada February 27, 2007 Motivation: Outline
Utilizing Batch Processing for GNSS Signal Tracking Andrey Soloviev Avionics Engineering Center, Ohio University Presented to: ION Alberta Section, Calgary, Canada February 27, 2007 Motivation: Outline
An ultra-low-cost antenna array frontend for GNSS application
 International Collaboration Centre for Research and Development on Satellite Navigation Technology in South East Asia An ultra-low-cost antenna array frontend for GNSS application Thuan D. Nguyen, Vinh
International Collaboration Centre for Research and Development on Satellite Navigation Technology in South East Asia An ultra-low-cost antenna array frontend for GNSS application Thuan D. Nguyen, Vinh
EE 570: Location and Navigation
 EE 570: Location and Navigation INS/GPS Integration Aly El-Osery 1 Stephen Bruder 2 1 Electrical Engineering Department, New Mexico Tech Socorro, New Mexico, USA 2 Electrical and Computer Engineering Department,
EE 570: Location and Navigation INS/GPS Integration Aly El-Osery 1 Stephen Bruder 2 1 Electrical Engineering Department, New Mexico Tech Socorro, New Mexico, USA 2 Electrical and Computer Engineering Department,
Advanced Multi-Receiver Vector Tracking for Positioning a Land Vehicle
 Advanced Multi-Receiver Vector Tracking for Positioning a Land Vehicle Yuting Ng, and Grace Xingxin Gao University of Illinois at Urbana-Champaign BIOGRAPHIES Yuting Ng is a Master s student in the Aerospace
Advanced Multi-Receiver Vector Tracking for Positioning a Land Vehicle Yuting Ng, and Grace Xingxin Gao University of Illinois at Urbana-Champaign BIOGRAPHIES Yuting Ng is a Master s student in the Aerospace
Robust GPS-Based Direct Timing Estimation for PMUs
 Author copy. Accepted for publication. Do not redistribute. Robust GPS-Based Direct Timing Estimation for PMUs Yuting Ng, Student Member, IEEE, Arthur Hsi-Ping Chu and Grace Xingxin Gao, Senior Member,
Author copy. Accepted for publication. Do not redistribute. Robust GPS-Based Direct Timing Estimation for PMUs Yuting Ng, Student Member, IEEE, Arthur Hsi-Ping Chu and Grace Xingxin Gao, Senior Member,
GPS Spoofer Localization for PMUs using Multi-Receiver Direct Time Estimation
 GPS Spoofer Localization for PMUs using Multi-Receiver Direct Time Estimation Sriramya Bhamidipati and Grace Xingxin Gao University of Illinois at Urbana-Champaign Abstract Our work highlights the improved
GPS Spoofer Localization for PMUs using Multi-Receiver Direct Time Estimation Sriramya Bhamidipati and Grace Xingxin Gao University of Illinois at Urbana-Champaign Abstract Our work highlights the improved
GNSS for UAV Navigation. Sandy Kennedy Nov.15, 2016 ITSNT
 GNSS for UAV Navigation Sandy Kennedy Nov.15, 2016 ITSNT Sounds Easy Enough Probably clear open sky conditions?» Maybe not on take off and landing Straight and level flight?» Not a valid assumption for
GNSS for UAV Navigation Sandy Kennedy Nov.15, 2016 ITSNT Sounds Easy Enough Probably clear open sky conditions?» Maybe not on take off and landing Straight and level flight?» Not a valid assumption for
Measurement Level Integration of Multiple Low-Cost GPS Receivers for UAVs
 Measurement Level Integration of Multiple Low-Cost GPS Receivers for UAVs Akshay Shetty and Grace Xingxin Gao University of Illinois at Urbana-Champaign BIOGRAPHY Akshay Shetty is a graduate student in
Measurement Level Integration of Multiple Low-Cost GPS Receivers for UAVs Akshay Shetty and Grace Xingxin Gao University of Illinois at Urbana-Champaign BIOGRAPHY Akshay Shetty is a graduate student in
c 2017 SRIRAMYA BHAMIDIPATI
 c 2017 SRIRAMYA BHAMIDIPATI ATTACK RESILIENT GPS BASED TIMING FOR PHASOR MEASUREMENT UNITS USING MULTI-RECEIVER DIRECT TIME ESTIMATION BY SRIRAMYA BHAMIDIPATI THESIS Submitted in partial fulfillment of
c 2017 SRIRAMYA BHAMIDIPATI ATTACK RESILIENT GPS BASED TIMING FOR PHASOR MEASUREMENT UNITS USING MULTI-RECEIVER DIRECT TIME ESTIMATION BY SRIRAMYA BHAMIDIPATI THESIS Submitted in partial fulfillment of
Resilient and Accurate Autonomous Vehicle Navigation via Signals of Opportunity
 Resilient and Accurate Autonomous Vehicle Navigation via Signals of Opportunity Zak M. Kassas Autonomous Systems Perception, Intelligence, and Navigation (ASPIN) Laboratory University of California, Riverside
Resilient and Accurate Autonomous Vehicle Navigation via Signals of Opportunity Zak M. Kassas Autonomous Systems Perception, Intelligence, and Navigation (ASPIN) Laboratory University of California, Riverside
Integrated Navigation System
 Integrated Navigation System Adhika Lie adhika@aem.umn.edu AEM 5333: Design, Build, Model, Simulate, Test and Fly Small Uninhabited Aerial Vehicles Feb 14, 2013 1 Navigation System Where am I? Position,
Integrated Navigation System Adhika Lie adhika@aem.umn.edu AEM 5333: Design, Build, Model, Simulate, Test and Fly Small Uninhabited Aerial Vehicles Feb 14, 2013 1 Navigation System Where am I? Position,
Guochang Xu GPS. Theory, Algorithms and Applications. Second Edition. With 59 Figures. Sprin ger
 Guochang Xu GPS Theory, Algorithms and Applications Second Edition With 59 Figures Sprin ger Contents 1 Introduction 1 1.1 AKeyNoteofGPS 2 1.2 A Brief Message About GLONASS 3 1.3 Basic Information of Galileo
Guochang Xu GPS Theory, Algorithms and Applications Second Edition With 59 Figures Sprin ger Contents 1 Introduction 1 1.1 AKeyNoteofGPS 2 1.2 A Brief Message About GLONASS 3 1.3 Basic Information of Galileo
GPS Beamforming with Low-cost RTL-SDRs Wil Myrick, Ph.D.
 with Low-cost RTL-SDRs Wil Myrick, Ph.D. September 13, 2017 Conference 2017 Recap from GRCon 2016 MWF Invented by Dr. Scott Goldstein and Dr. Irving Reed (1996) Initial Release (2001) Revisited GPS Work
with Low-cost RTL-SDRs Wil Myrick, Ph.D. September 13, 2017 Conference 2017 Recap from GRCon 2016 MWF Invented by Dr. Scott Goldstein and Dr. Irving Reed (1996) Initial Release (2001) Revisited GPS Work
Real-Time Software Receiver Using Massively Parallel
 Real-Time Software Receiver Using Massively Parallel Processors for GPS Adaptive Antenna Array Processing Jiwon Seo, David De Lorenzo, Sherman Lo, Per Enge, Stanford University Yu-Hsuan Chen, National
Real-Time Software Receiver Using Massively Parallel Processors for GPS Adaptive Antenna Array Processing Jiwon Seo, David De Lorenzo, Sherman Lo, Per Enge, Stanford University Yu-Hsuan Chen, National
GALILEO Applications. Andreas Schütz Training on GNSS T131 / T151 Bangkok, January 14th 2019
 GALILEO Applications Andreas Schütz Training on GNSS T131 / T151 Bangkok, January 14th 201 Overview GNSS Downstream Applications overview The GALILEO Open Service The GALILEO Public Regulated Service The
GALILEO Applications Andreas Schütz Training on GNSS T131 / T151 Bangkok, January 14th 201 Overview GNSS Downstream Applications overview The GALILEO Open Service The GALILEO Public Regulated Service The
Foreword by Glen Gibbons About this book Acknowledgments List of abbreviations and acronyms List of definitions
 Table of Foreword by Glen Gibbons About this book Acknowledgments List of abbreviations and acronyms List of definitions page xiii xix xx xxi xxv Part I GNSS: orbits, signals, and methods 1 GNSS ground
Table of Foreword by Glen Gibbons About this book Acknowledgments List of abbreviations and acronyms List of definitions page xiii xix xx xxi xxv Part I GNSS: orbits, signals, and methods 1 GNSS ground
Relative Navigation, Timing & Data. Communications for CubeSat Clusters. Nestor Voronka, Tyrel Newton
 Relative Navigation, Timing & Data Communications for CubeSat Clusters Nestor Voronka, Tyrel Newton Tethers Unlimited, Inc. 11711 N. Creek Pkwy S., Suite D113 Bothell, WA 98011 425-486-0100x678 voronka@tethers.com
Relative Navigation, Timing & Data Communications for CubeSat Clusters Nestor Voronka, Tyrel Newton Tethers Unlimited, Inc. 11711 N. Creek Pkwy S., Suite D113 Bothell, WA 98011 425-486-0100x678 voronka@tethers.com
3D-Map Aided Multipath Mitigation for Urban GNSS Positioning
 Summer School on GNSS 2014 Student Scholarship Award Workshop August 2, 2014 3D-Map Aided Multipath Mitigation for Urban GNSS Positioning I-Wen Chu National Cheng Kung University, Taiwan. Page 1 Outline
Summer School on GNSS 2014 Student Scholarship Award Workshop August 2, 2014 3D-Map Aided Multipath Mitigation for Urban GNSS Positioning I-Wen Chu National Cheng Kung University, Taiwan. Page 1 Outline
Adaptive Array Technology for Navigation in Challenging Signal Environments
 Adaptive Array Technology for Navigation in Challenging Signal Environments November 15, 2016 Point of Contact: Dr. Gary A. McGraw Technical Fellow Communications & Navigation Systems Advanced Technology
Adaptive Array Technology for Navigation in Challenging Signal Environments November 15, 2016 Point of Contact: Dr. Gary A. McGraw Technical Fellow Communications & Navigation Systems Advanced Technology
THOMAS PANY SOFTWARE RECEIVERS
 TECHNOLOGY AND APPLICATIONS SERIES THOMAS PANY SOFTWARE RECEIVERS Contents Preface Acknowledgments xiii xvii Chapter 1 Radio Navigation Signals 1 1.1 Signal Generation 1 1.2 Signal Propagation 2 1.3 Signal
TECHNOLOGY AND APPLICATIONS SERIES THOMAS PANY SOFTWARE RECEIVERS Contents Preface Acknowledgments xiii xvii Chapter 1 Radio Navigation Signals 1 1.1 Signal Generation 1 1.2 Signal Propagation 2 1.3 Signal
Satellite and Inertial Attitude. A presentation by Dan Monroe and Luke Pfister Advised by Drs. In Soo Ahn and Yufeng Lu
 Satellite and Inertial Attitude and Positioning System A presentation by Dan Monroe and Luke Pfister Advised by Drs. In Soo Ahn and Yufeng Lu Outline Project Introduction Theoretical Background Inertial
Satellite and Inertial Attitude and Positioning System A presentation by Dan Monroe and Luke Pfister Advised by Drs. In Soo Ahn and Yufeng Lu Outline Project Introduction Theoretical Background Inertial
A Multi-Layered, Multi-Receiver Architecture
 GPS-BASED TIMING A Multi-Layered, Multi-Receiver Architecture Reliable GPS-Based Timing for Power Systems LIANG HENG, DANIEL CHOU, AND GRACE XINGXIN GAO UNIVERSITY OF ILLINOIS AT URBANA-CHAMPAIGN Phasor
GPS-BASED TIMING A Multi-Layered, Multi-Receiver Architecture Reliable GPS-Based Timing for Power Systems LIANG HENG, DANIEL CHOU, AND GRACE XINGXIN GAO UNIVERSITY OF ILLINOIS AT URBANA-CHAMPAIGN Phasor
Assessing & Mitigation of risks on railways operational scenarios
 R H I N O S Railway High Integrity Navigation Overlay System Assessing & Mitigation of risks on railways operational scenarios Rome, June 22 nd 2017 Anja Grosch, Ilaria Martini, Omar Garcia Crespillo (DLR)
R H I N O S Railway High Integrity Navigation Overlay System Assessing & Mitigation of risks on railways operational scenarios Rome, June 22 nd 2017 Anja Grosch, Ilaria Martini, Omar Garcia Crespillo (DLR)
POWERGPS : A New Family of High Precision GPS Products
 POWERGPS : A New Family of High Precision GPS Products Hiroshi Okamoto and Kazunori Miyahara, Sokkia Corp. Ron Hatch and Tenny Sharpe, NAVCOM Technology Inc. BIOGRAPHY Mr. Okamoto is the Manager of Research
POWERGPS : A New Family of High Precision GPS Products Hiroshi Okamoto and Kazunori Miyahara, Sokkia Corp. Ron Hatch and Tenny Sharpe, NAVCOM Technology Inc. BIOGRAPHY Mr. Okamoto is the Manager of Research
Spoofing GPS Receiver Clock Offset of Phasor Measurement Units 1
 Spoofing GPS Receiver Clock Offset of Phasor Measurement Units 1 Xichen Jiang (in collaboration with J. Zhang, B. J. Harding, J. J. Makela, and A. D. Domínguez-García) Department of Electrical and Computer
Spoofing GPS Receiver Clock Offset of Phasor Measurement Units 1 Xichen Jiang (in collaboration with J. Zhang, B. J. Harding, J. J. Makela, and A. D. Domínguez-García) Department of Electrical and Computer
GNSS Multi-Receiver Vector Tracking
 1 GNSS Multi- Vector Tracking Yuting Ng, Student Member, IEEE and Grace Xingxin Gao, Senior Member, IEEE Abstract Accurate, reliable and robust localization is desirable for many navigation applications.
1 GNSS Multi- Vector Tracking Yuting Ng, Student Member, IEEE and Grace Xingxin Gao, Senior Member, IEEE Abstract Accurate, reliable and robust localization is desirable for many navigation applications.
Modernised GNSS Receiver and Design Methodology
 Modernised GNSS Receiver and Design Methodology March 12, 2007 Overview Motivation Design targets HW architecture Receiver ASIC Design methodology Design and simulation Real Time Emulation Software module
Modernised GNSS Receiver and Design Methodology March 12, 2007 Overview Motivation Design targets HW architecture Receiver ASIC Design methodology Design and simulation Real Time Emulation Software module
Navigation für herausfordernde Anwendungen Robuste Satellitennavigation für sicherheitskritische Anwendungen
 www.dlr.de Chart 1 Navigation für herausfordernde Anwendungen Robuste Satellitennavigation für sicherheitskritische Anwendungen PD Dr.-Ing. habil. Michael Meurer German Aerospace Centre (DLR), Oberpfaffenhofen
www.dlr.de Chart 1 Navigation für herausfordernde Anwendungen Robuste Satellitennavigation für sicherheitskritische Anwendungen PD Dr.-Ing. habil. Michael Meurer German Aerospace Centre (DLR), Oberpfaffenhofen
GPS and Recent Alternatives for Localisation. Dr. Thierry Peynot Australian Centre for Field Robotics The University of Sydney
 GPS and Recent Alternatives for Localisation Dr. Thierry Peynot Australian Centre for Field Robotics The University of Sydney Global Positioning System (GPS) All-weather and continuous signal system designed
GPS and Recent Alternatives for Localisation Dr. Thierry Peynot Australian Centre for Field Robotics The University of Sydney Global Positioning System (GPS) All-weather and continuous signal system designed
FieldGenius Technical Notes GPS Terminology
 FieldGenius Technical Notes GPS Terminology Almanac A set of Keplerian orbital parameters which allow the satellite positions to be predicted into the future. Ambiguity An integer value of the number of
FieldGenius Technical Notes GPS Terminology Almanac A set of Keplerian orbital parameters which allow the satellite positions to be predicted into the future. Ambiguity An integer value of the number of
Antenna Arrays for Robust GNSS in Challenging Environments Presented by Andriy Konovaltsev
 www.dlr.de Chart 1 > Antenna Arrays for Robust GNSS > A. Konovaltsev > 17.11.2014 Antenna Arrays for Robust GNSS in Challenging Environments Presented by Andriy Konovaltsev Institute of Communications
www.dlr.de Chart 1 > Antenna Arrays for Robust GNSS > A. Konovaltsev > 17.11.2014 Antenna Arrays for Robust GNSS in Challenging Environments Presented by Andriy Konovaltsev Institute of Communications
Trustworthy Positioning for Next Generation Intelligent Transport Systems Ahmed El-Mowafy
 Trustworthy Positioning for Next Generation Intelligent Transport Systems Ahmed El-Mowafy Contents Background on ITS and C-ITS Requirements Challenges RAIM Test and Results Utilisation Workshop, Sydney,
Trustworthy Positioning for Next Generation Intelligent Transport Systems Ahmed El-Mowafy Contents Background on ITS and C-ITS Requirements Challenges RAIM Test and Results Utilisation Workshop, Sydney,
GPS-Aided INS Datasheet Rev. 2.6
 GPS-Aided INS 1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO and BEIDOU navigation
GPS-Aided INS 1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO and BEIDOU navigation
Introduction to GNSS Base-Station
 Introduction to GNSS Base-Station Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp Slide : 1 Introduction GPS or GNSS observation
Introduction to GNSS Base-Station Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp Slide : 1 Introduction GPS or GNSS observation
GPS/QZSS Signal Authentication Concept
 GPS/QZSS Signal Authentication Concept Dinesh Manandhar, Koichi Chino, Ryosuke Shibasaki The University of Tokyo Satoshi Kogure, Jiro Yamashita, Hiroaki Tateshita Japan Aerospace Exploration Agency (JAXA)
GPS/QZSS Signal Authentication Concept Dinesh Manandhar, Koichi Chino, Ryosuke Shibasaki The University of Tokyo Satoshi Kogure, Jiro Yamashita, Hiroaki Tateshita Japan Aerospace Exploration Agency (JAXA)
Understanding GPS: Principles and Applications Second Edition
 Understanding GPS: Principles and Applications Second Edition Elliott Kaplan and Christopher Hegarty ISBN 1-58053-894-0 Approx. 680 pages Navtech Part #1024 This thoroughly updated second edition of an
Understanding GPS: Principles and Applications Second Edition Elliott Kaplan and Christopher Hegarty ISBN 1-58053-894-0 Approx. 680 pages Navtech Part #1024 This thoroughly updated second edition of an
Jamming and Spoofing of GNSS Signals An Underestimated Risk?!
 Jamming and Spoofing of GNSS Signals An Underestimated Risk?! Alexander Rügamer Dirk Kowalewski Fraunhofer IIS NavXperience GmbH Fraunhofer IIS 1 Source: http://securityaffairs.co/wordpress/wpcontent/uploads/2012/02/spoofing.jpg
Jamming and Spoofing of GNSS Signals An Underestimated Risk?! Alexander Rügamer Dirk Kowalewski Fraunhofer IIS NavXperience GmbH Fraunhofer IIS 1 Source: http://securityaffairs.co/wordpress/wpcontent/uploads/2012/02/spoofing.jpg
Future of GNSS Receivers. Éamonn Glennon
 Future of GNSS Receivers Éamonn Glennon Future of GNSS Receivers? What have we got now? What do customers want? What does government want? What are the problems with current receivers? What type of receivers?
Future of GNSS Receivers Éamonn Glennon Future of GNSS Receivers? What have we got now? What do customers want? What does government want? What are the problems with current receivers? What type of receivers?
Reliability Estimation for RTK-GNSS/IMU/Vehicle Speed Sensors in Urban Environment
 Laboratory of Satellite Navigation Engineering Reliability Estimation for RTK-GNSS/IMU/Vehicle Speed Sensors in Urban Environment Ren Kikuchi, Nobuaki Kubo (TUMSAT) Shigeki Kawai, Ichiro Kato, Nobuyuki
Laboratory of Satellite Navigation Engineering Reliability Estimation for RTK-GNSS/IMU/Vehicle Speed Sensors in Urban Environment Ren Kikuchi, Nobuaki Kubo (TUMSAT) Shigeki Kawai, Ichiro Kato, Nobuyuki
School of Surveying & Spatial Information Systems, UNSW, Sydney, Australia
 Development of an Unmanned Aerial Vehicle Platform Using Multisensor Navigation Technology School of Surveying & Spatial Information Systems, UNSW, Sydney, Australia Gang Sun 1,2, Jiawei Xie 1, Yong Li
Development of an Unmanned Aerial Vehicle Platform Using Multisensor Navigation Technology School of Surveying & Spatial Information Systems, UNSW, Sydney, Australia Gang Sun 1,2, Jiawei Xie 1, Yong Li
Signals, and Receivers
 ENGINEERING SATELLITE-BASED NAVIGATION AND TIMING Global Navigation Satellite Systems, Signals, and Receivers John W. Betz IEEE IEEE PRESS Wiley CONTENTS Preface Acknowledgments Useful Constants List of
ENGINEERING SATELLITE-BASED NAVIGATION AND TIMING Global Navigation Satellite Systems, Signals, and Receivers John W. Betz IEEE IEEE PRESS Wiley CONTENTS Preface Acknowledgments Useful Constants List of
GPS-Aided INS Datasheet Rev. 2.7
 1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS and BEIDOU navigation and highperformance
1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS and BEIDOU navigation and highperformance
Building obstructions and reflections present
 WITH RICHARD B. LANGLEY REFLECTED BLESSINGS Position Estimation Using Non-Line-of-Sight Signals By Yuting Ng and Grace Xingxin Gao Building obstructions and reflections present serious challenges to receivers
WITH RICHARD B. LANGLEY REFLECTED BLESSINGS Position Estimation Using Non-Line-of-Sight Signals By Yuting Ng and Grace Xingxin Gao Building obstructions and reflections present serious challenges to receivers
The Benefits of Three Frequencies for the High Accuracy Positioning
 The Benefits of Three Frequencies for the High Accuracy Positioning Nobuaki Kubo (Tokyo University of Marine and Science Technology) Akio Yasuda (Tokyo University of Marine and Science Technology) Isao
The Benefits of Three Frequencies for the High Accuracy Positioning Nobuaki Kubo (Tokyo University of Marine and Science Technology) Akio Yasuda (Tokyo University of Marine and Science Technology) Isao
Cooperative navigation: outline
 Positioning and Navigation in GPS-challenged Environments: Cooperative Navigation Concept Dorota A Grejner-Brzezinska, Charles K Toth, Jong-Ki Lee and Xiankun Wang Satellite Positioning and Inertial Navigation
Positioning and Navigation in GPS-challenged Environments: Cooperative Navigation Concept Dorota A Grejner-Brzezinska, Charles K Toth, Jong-Ki Lee and Xiankun Wang Satellite Positioning and Inertial Navigation
Inertial Navigation System
 Apogee Series ULTIMATE ACCURACY MEMS Inertial Navigation System INS MRU AHRS ITAR Free 0.005 RMS Motion Sensing & Georeferencing APOGEE SERIES makes high accuracy affordable for all surveying companies.
Apogee Series ULTIMATE ACCURACY MEMS Inertial Navigation System INS MRU AHRS ITAR Free 0.005 RMS Motion Sensing & Georeferencing APOGEE SERIES makes high accuracy affordable for all surveying companies.
Ultra-wideband Radio Aided Carrier Phase Ambiguity Resolution in Real-Time Kinematic GPS Relative Positioning
 Ultra-wideband Radio Aided Carrier Phase Ambiguity Resolution in Real-Time Kinematic GPS Relative Positioning Eric Broshears, Scott Martin and Dr. David Bevly, Auburn University Biography Eric Broshears
Ultra-wideband Radio Aided Carrier Phase Ambiguity Resolution in Real-Time Kinematic GPS Relative Positioning Eric Broshears, Scott Martin and Dr. David Bevly, Auburn University Biography Eric Broshears
MOBILE COMPUTING 1/28/18. Location, Location, Location. Overview. CSE 40814/60814 Spring 2018
 MOBILE COMPUTING CSE 40814/60814 Spring 018 Location, Location, Location Location information adds context to activity: location of sensed events in the physical world location-aware services location
MOBILE COMPUTING CSE 40814/60814 Spring 018 Location, Location, Location Location information adds context to activity: location of sensed events in the physical world location-aware services location
The Case for Recording IF Data for GNSS Signal Forensic Analysis Using a SDR
 The Case for Recording IF Data for GNSS Signal Forensic Analysis Using a SDR Professor Gérard Lachapelle & Dr. Ali Broumandan PLAN Group, University of Calgary PLAN.geomatics.ucalgary.ca IGAW 2016-GNSS
The Case for Recording IF Data for GNSS Signal Forensic Analysis Using a SDR Professor Gérard Lachapelle & Dr. Ali Broumandan PLAN Group, University of Calgary PLAN.geomatics.ucalgary.ca IGAW 2016-GNSS
GPS-Aided INS Datasheet Rev. 3.0
 1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS, BEIDOU and L-Band navigation
1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS, BEIDOU and L-Band navigation
SERIES VECTORNAV TACTICAL SERIES VN-110 IMU/AHRS VN-210 GNSS/INS VN-310 DUAL GNSS/INS
 TACTICAL VECTORNAV SERIES TACTICAL SERIES VN110 IMU/AHRS VN210 GNSS/INS VN310 DUAL GNSS/INS VectorNav introduces the Tactical Series, a nextgeneration, MEMS inertial navigation platform that features highperformance
TACTICAL VECTORNAV SERIES TACTICAL SERIES VN110 IMU/AHRS VN210 GNSS/INS VN310 DUAL GNSS/INS VectorNav introduces the Tactical Series, a nextgeneration, MEMS inertial navigation platform that features highperformance
Chapter 6. Temperature Effects
 Chapter 6. Temperature Effects 6.1 Introduction This chapter documents the investigation into temperature drifts that can cause a receiver clock bias even when a stable reference is used. The first step
Chapter 6. Temperature Effects 6.1 Introduction This chapter documents the investigation into temperature drifts that can cause a receiver clock bias even when a stable reference is used. The first step
GPS-Aided INS Datasheet Rev. 2.3
 GPS-Aided INS 1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined L1 & L2 GPS, GLONASS, GALILEO and BEIDOU navigation and
GPS-Aided INS 1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined L1 & L2 GPS, GLONASS, GALILEO and BEIDOU navigation and
ENHANCEMENTS IN UAV FLIGHT CONTROL AND SENSOR ORIENTATION
 Heinz Jürgen Przybilla Manfred Bäumker, Alexander Zurhorst ENHANCEMENTS IN UAV FLIGHT CONTROL AND SENSOR ORIENTATION Content Introduction Precise Positioning GNSS sensors and software Inertial and augmentation
Heinz Jürgen Przybilla Manfred Bäumker, Alexander Zurhorst ENHANCEMENTS IN UAV FLIGHT CONTROL AND SENSOR ORIENTATION Content Introduction Precise Positioning GNSS sensors and software Inertial and augmentation
UNIVERSITY OF CALGARY. DGPS and UWB Aided Vector-Based GNSS Receiver for Weak Signal Environments. Billy Chan A THESIS
 UNIVERSITY OF CALGARY DGPS and UWB Aided Vector-Based GNSS Receiver for Weak Signal Environments by Billy Chan A THESIS SUBMITTED TO THE FACULTY OF GRADUATE STUDIES IN PARTIAL FULFILMENT OF THE REQUIREMENTS
UNIVERSITY OF CALGARY DGPS and UWB Aided Vector-Based GNSS Receiver for Weak Signal Environments by Billy Chan A THESIS SUBMITTED TO THE FACULTY OF GRADUATE STUDIES IN PARTIAL FULFILMENT OF THE REQUIREMENTS
Hydrofest The Hydrographic Society in Scotland
 Hydrofest 2017 The Hydrographic Society in Scotland POSITIONING SYSTEMS Eddie Milne 1. GNSS Positioning 2. Additional Sensors 3. Alternative Positioning 4. Bringing it altogether GNSS = GPS + Glonass +
Hydrofest 2017 The Hydrographic Society in Scotland POSITIONING SYSTEMS Eddie Milne 1. GNSS Positioning 2. Additional Sensors 3. Alternative Positioning 4. Bringing it altogether GNSS = GPS + Glonass +
Performance Analysis of Joint Multi-Antenna Spoofing Detection and Attitude Estimation
 Performance Analysis of Joint Multi-Antenna Spoofing Detection and Attitude Estimation Andriy Konovaltsev, Manuel Cuntz, Christian Haettich, Michael Meurer Institute of Communications and Navigation, German
Performance Analysis of Joint Multi-Antenna Spoofing Detection and Attitude Estimation Andriy Konovaltsev, Manuel Cuntz, Christian Haettich, Michael Meurer Institute of Communications and Navigation, German
Prototype Software-based Receiver for Remote Sensing using Reflected GPS Signals. Dinesh Manandhar The University of Tokyo
 Prototype Software-based Receiver for Remote Sensing using Reflected GPS Signals Dinesh Manandhar The University of Tokyo dinesh@qzss.org 1 Contents Background Remote Sensing Capability System Architecture
Prototype Software-based Receiver for Remote Sensing using Reflected GPS Signals Dinesh Manandhar The University of Tokyo dinesh@qzss.org 1 Contents Background Remote Sensing Capability System Architecture
Including GNSS Based Heading in Inertial Aided GNSS DP Reference System
 Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 9-10, 2012 Sensors II SESSION Including GNSS Based Heading in Inertial Aided GNSS DP Reference System By Arne Rinnan, Nina
Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 9-10, 2012 Sensors II SESSION Including GNSS Based Heading in Inertial Aided GNSS DP Reference System By Arne Rinnan, Nina
Precise GNSS Positioning for Mass-market Applications
 Precise GNSS Positioning for Mass-market Applications Yang GAO, Canada Key words: GNSS, Precise GNSS Positioning, Precise Point Positioning (PPP), Correction Service, Low-Cost GNSS, Mass-Market Application
Precise GNSS Positioning for Mass-market Applications Yang GAO, Canada Key words: GNSS, Precise GNSS Positioning, Precise Point Positioning (PPP), Correction Service, Low-Cost GNSS, Mass-Market Application
Implementation and Performance Evaluation of a Fast Relocation Method in a GPS/SINS/CSAC Integrated Navigation System Hardware Prototype
 This article has been accepted and published on J-STAGE in advance of copyediting. Content is final as presented. Implementation and Performance Evaluation of a Fast Relocation Method in a GPS/SINS/CSAC
This article has been accepted and published on J-STAGE in advance of copyediting. Content is final as presented. Implementation and Performance Evaluation of a Fast Relocation Method in a GPS/SINS/CSAC
Improved Jamming Resilience of GPS Timing for Phasor Measurement Units using Position-Information-Aided Vector Tracking
 1 Improved Jamming Resilience of GPS Timing for Phasor Measurement Units using Position-Information-Aided Vector Tracking Sriramya Bhamidipati, and Grace Xingxin Gao, Senior Member, IEEE Abstract In recent
1 Improved Jamming Resilience of GPS Timing for Phasor Measurement Units using Position-Information-Aided Vector Tracking Sriramya Bhamidipati, and Grace Xingxin Gao, Senior Member, IEEE Abstract In recent
GNSS for Landing Systems and Carrier Smoothing Techniques Christoph Günther, Patrick Henkel
 GNSS for Landing Systems and Carrier Smoothing Techniques Christoph Günther, Patrick Henkel Institute of Communications and Navigation Page 1 Instrument Landing System workhorse for all CAT-I III approach
GNSS for Landing Systems and Carrier Smoothing Techniques Christoph Günther, Patrick Henkel Institute of Communications and Navigation Page 1 Instrument Landing System workhorse for all CAT-I III approach
Performance Evaluation Of Real Time Precise Point Positioning (RT-PPP) In Static & Kinematic Modes In Egypt
 In Static & Kinematic Modes In Egypt") Performance Evaluation Of Real Time Precise Point Positioning (RT-PPP) In Static & Kinematic Modes In Egypt Eng. Ahmed Mansour Abdallah Dr. Mahmoud Abd Rabbou Prof. Adel El.shazly Geomatic Branch, Civil
Performance Evaluation Of Real Time Precise Point Positioning (RT-PPP) In Static & Kinematic Modes In Egypt Eng. Ahmed Mansour Abdallah Dr. Mahmoud Abd Rabbou Prof. Adel El.shazly Geomatic Branch, Civil
UCGE Reports Number 20305
 UCGE Reports Number 20305 Department of Geomatics Engineering Ultra-Tight GPS/Reduced IMU for Land Vehicle Navigation (URL: http://www.geomatics.ucalgary.ca/graduatetheses) By Debo Sun March 2010 UNIVERSITY
UCGE Reports Number 20305 Department of Geomatics Engineering Ultra-Tight GPS/Reduced IMU for Land Vehicle Navigation (URL: http://www.geomatics.ucalgary.ca/graduatetheses) By Debo Sun March 2010 UNIVERSITY
GNSS RFI/Spoofing: Detection, Localization, & Mitigation
 GNSS RFI/Spoofing: Detection, Localization, & Mitigation Stanford's 2012 PNT Challenges and Opportunities Symposium 14 - November - 2012 Dennis M. Akos University of Colorado/Stanford University with contributions
GNSS RFI/Spoofing: Detection, Localization, & Mitigation Stanford's 2012 PNT Challenges and Opportunities Symposium 14 - November - 2012 Dennis M. Akos University of Colorado/Stanford University with contributions
Lab on GNSS Signal Processing Part II
 JRC SUMMERSCHOOL GNSS Lab on GNSS Signal Processing Part II Daniele Borio European Commission Joint Research Centre Davos, Switzerland, July 15-25, 2013 INTRODUCTION Second Part of the Lab: Introduction
JRC SUMMERSCHOOL GNSS Lab on GNSS Signal Processing Part II Daniele Borio European Commission Joint Research Centre Davos, Switzerland, July 15-25, 2013 INTRODUCTION Second Part of the Lab: Introduction
Inertial Systems. Ekinox Series TACTICAL GRADE MEMS. Motion Sensing & Navigation IMU AHRS MRU INS VG
 Ekinox Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.05 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE EKINOX SERIES R&D specialists usually compromise between high
Ekinox Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.05 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE EKINOX SERIES R&D specialists usually compromise between high
KALMAN FILTER APPLICATIONS
 ECE555: Applied Kalman Filtering 1 1 KALMAN FILTER APPLICATIONS 1.1: Examples of Kalman filters To wrap up the course, we look at several of the applications introduced in notes chapter 1, but in more
ECE555: Applied Kalman Filtering 1 1 KALMAN FILTER APPLICATIONS 1.1: Examples of Kalman filters To wrap up the course, we look at several of the applications introduced in notes chapter 1, but in more
(SDR) Based Communication Downlinks for CubeSats
 Based Communication Downlinks for CubeSats") Software Defined Radio (SDR) Based Communication Downlinks for CubeSats Nestor Voronka, Tyrel Newton, Alan Chandler, Peter Gagnon Tethers Unlimited, Inc. 11711 N. Creek Pkwy S., Suite D113 Bothell, WA
Software Defined Radio (SDR) Based Communication Downlinks for CubeSats Nestor Voronka, Tyrel Newton, Alan Chandler, Peter Gagnon Tethers Unlimited, Inc. 11711 N. Creek Pkwy S., Suite D113 Bothell, WA
A VIRTUAL VALIDATION ENVIRONMENT FOR THE DESIGN OF AUTOMOTIVE SATELLITE BASED NAVIGATION SYSTEMS FOR URBAN CANYONS
 49. Internationales Wissenschaftliches Kolloquium Technische Universität Ilmenau 27.-30. September 2004 Holger Rath / Peter Unger /Tommy Baumann / Andreas Emde / David Grüner / Thomas Lohfelder / Jens
49. Internationales Wissenschaftliches Kolloquium Technische Universität Ilmenau 27.-30. September 2004 Holger Rath / Peter Unger /Tommy Baumann / Andreas Emde / David Grüner / Thomas Lohfelder / Jens
IMPROVED RELATIVE POSITIONING FOR PATH FOLLOWING IN AUTONOMOUS CONVOYS
 2018 NDIA GROUND VEHICLE SYSTEMS ENGINEERING AND TECHNOLOGY SYMPOSIUM AUTONOMOUS GROUND SYSTEMS (AGS) TECHNICAL SESSION AUGUST 7-9, 2018 - NOVI, MICHIGAN IMPROVED RELATIVE POSITIONING FOR PATH FOLLOWING
2018 NDIA GROUND VEHICLE SYSTEMS ENGINEERING AND TECHNOLOGY SYMPOSIUM AUTONOMOUS GROUND SYSTEMS (AGS) TECHNICAL SESSION AUGUST 7-9, 2018 - NOVI, MICHIGAN IMPROVED RELATIVE POSITIONING FOR PATH FOLLOWING
Global Navigation Satellite Systems (GNSS)Part I EE 570: Location and Navigation
Part I EE 570: Location and Navigation") Lecture Global Navigation Satellite Systems (GNSS)Part I EE 570: Location and Navigation Lecture Notes Update on April 25, 2016 Aly El-Osery and Kevin Wedeward, Electrical Engineering Dept., New Mexico
Lecture Global Navigation Satellite Systems (GNSS)Part I EE 570: Location and Navigation Lecture Notes Update on April 25, 2016 Aly El-Osery and Kevin Wedeward, Electrical Engineering Dept., New Mexico
NovAtel SPAN and Waypoint GNSS + INS Technology
 NovAtel SPAN and Waypoint GNSS + INS Technology SPAN Technology SPAN provides real-time positioning and attitude determination where traditional GNSS receivers have difficulties; in urban canyons or heavily
NovAtel SPAN and Waypoint GNSS + INS Technology SPAN Technology SPAN provides real-time positioning and attitude determination where traditional GNSS receivers have difficulties; in urban canyons or heavily
Fundamentals of Global Positioning System Receivers
 Fundamentals of Global Positioning System Receivers A Software Approach SECOND EDITION JAMES BAO-YEN TSUI A JOHN WILEY & SONS, INC., PUBLICATION Fundamentals of Global Positioning System Receivers Fundamentals
Fundamentals of Global Positioning System Receivers A Software Approach SECOND EDITION JAMES BAO-YEN TSUI A JOHN WILEY & SONS, INC., PUBLICATION Fundamentals of Global Positioning System Receivers Fundamentals
GPS Multi-Receiver Joint Direct Time Estimation and Spoofer Localization
 GPS Multi-Receiver Joint Direct Time Estimation and Spoofer Localization Sriramya Bhamidipati and Grace Xingxin Gao, Senior Member, IEEE Abstract We propose a novel algorithm on joint estimation of spoofer
GPS Multi-Receiver Joint Direct Time Estimation and Spoofer Localization Sriramya Bhamidipati and Grace Xingxin Gao, Senior Member, IEEE Abstract We propose a novel algorithm on joint estimation of spoofer
NovAtel SPAN and Waypoint. GNSS + INS Technology
 NovAtel SPAN and Waypoint GNSS + INS Technology SPAN Technology SPAN provides continual 3D positioning, velocity and attitude determination anywhere satellite reception may be compromised. SPAN uses NovAtel
NovAtel SPAN and Waypoint GNSS + INS Technology SPAN Technology SPAN provides continual 3D positioning, velocity and attitude determination anywhere satellite reception may be compromised. SPAN uses NovAtel
GPS-denied Pedestrian Tracking in Indoor Environments Using an IMU and Magnetic Compass
 GPS-denied Pedestrian Tracking in Indoor Environments Using an IMU and Magnetic Compass W. Todd Faulkner, Robert Alwood, David W. A. Taylor, Jane Bohlin Advanced Projects and Applications Division ENSCO,
GPS-denied Pedestrian Tracking in Indoor Environments Using an IMU and Magnetic Compass W. Todd Faulkner, Robert Alwood, David W. A. Taylor, Jane Bohlin Advanced Projects and Applications Division ENSCO,
Cooperative navigation (part II)
") Cooperative navigation (part II) An example using foot-mounted INS and UWB-transceivers Jouni Rantakokko Aim Increased accuracy during long-term operations in GNSS-challenged environments for - First responders
Cooperative navigation (part II) An example using foot-mounted INS and UWB-transceivers Jouni Rantakokko Aim Increased accuracy during long-term operations in GNSS-challenged environments for - First responders
GNSS-Receiver with open interface for deeply coupling and vector tracking
 GNSS-Receiver with open interface for deeply coupling and vector tracking Matthias Overbeck, Dr. Fabio Garzia, Christian Strobel, Christian Nickel, Muhammad Saad, Daniel Meister, Dr. Wolfgang Felber, Fraunhofer
GNSS-Receiver with open interface for deeply coupling and vector tracking Matthias Overbeck, Dr. Fabio Garzia, Christian Strobel, Christian Nickel, Muhammad Saad, Daniel Meister, Dr. Wolfgang Felber, Fraunhofer
Decoding Galileo and Compass
 Decoding Galileo and Compass Grace Xingxin Gao The GPS Lab, Stanford University June 14, 2007 What is Galileo System? Global Navigation Satellite System built by European Union The first Galileo test satellite
Decoding Galileo and Compass Grace Xingxin Gao The GPS Lab, Stanford University June 14, 2007 What is Galileo System? Global Navigation Satellite System built by European Union The first Galileo test satellite
GPS Field Experiment for Balloon-based Operation Vehicle
 GPS Field Experiment for Balloon-based Operation Vehicle P.J. Buist, S. Verhagen, Delft University of Technology T. Hashimoto, S. Sakai, N. Bando, JAXA p.j.buist@tudelft.nl 1 Objective of Paper This paper
GPS Field Experiment for Balloon-based Operation Vehicle P.J. Buist, S. Verhagen, Delft University of Technology T. Hashimoto, S. Sakai, N. Bando, JAXA p.j.buist@tudelft.nl 1 Objective of Paper This paper
REAL-TIME GPS ATTITUDE DETERMINATION SYSTEM BASED ON EPOCH-BY-EPOCH TECHNOLOGY
 REAL-TIME GPS ATTITUDE DETERMINATION SYSTEM BASED ON EPOCH-BY-EPOCH TECHNOLOGY Dr. Yehuda Bock 1, Thomas J. Macdonald 2, John H. Merts 3, William H. Spires III 3, Dr. Lydia Bock 1, Dr. Jeffrey A. Fayman
REAL-TIME GPS ATTITUDE DETERMINATION SYSTEM BASED ON EPOCH-BY-EPOCH TECHNOLOGY Dr. Yehuda Bock 1, Thomas J. Macdonald 2, John H. Merts 3, William H. Spires III 3, Dr. Lydia Bock 1, Dr. Jeffrey A. Fayman
One Source for Positioning Success
 novatel.com One Source for Positioning Success RTK, PPP, SBAS OR DGNSS. NOVATEL CORRECT OPTIMIZES ALL CORRECTION SOURCES, PUTTING MORE POWER, FLEXIBILITY AND CONTROL IN YOUR HANDS. NovAtel CORRECT is the
novatel.com One Source for Positioning Success RTK, PPP, SBAS OR DGNSS. NOVATEL CORRECT OPTIMIZES ALL CORRECTION SOURCES, PUTTING MORE POWER, FLEXIBILITY AND CONTROL IN YOUR HANDS. NovAtel CORRECT is the
PROTECTING GPS/GNSS-RELIANT MILITARY SYSTEMS
 PROTECTING GPS/GNSS-RELIANT MILITARY SYSTEMS John Fischer VP Advanced R&D Jon Sinden Product Manager, Rugged PNT 6/21/2018 ABOUT OROLIA A world leader in assured positioning, navigation and timing (PNT)
PROTECTING GPS/GNSS-RELIANT MILITARY SYSTEMS John Fischer VP Advanced R&D Jon Sinden Product Manager, Rugged PNT 6/21/2018 ABOUT OROLIA A world leader in assured positioning, navigation and timing (PNT)
Generation of Consistent GNSS SSR Corrections
 Generation of Consistent GNSS SSR Corrections for Distributed CORS Networks Jannes Wübbena, Martin Schmitz, Gerhard Wübbena Geo++ GmbH 30827 Garbsen, Germany www.geopp.de Abstract Generation of Consistent
Generation of Consistent GNSS SSR Corrections for Distributed CORS Networks Jannes Wübbena, Martin Schmitz, Gerhard Wübbena Geo++ GmbH 30827 Garbsen, Germany www.geopp.de Abstract Generation of Consistent
Analysis on GNSS Receiver with the Principles of Signal and Information
 Analysis on GNSS Receiver with the Principles of Signal and Information Lishu Guo 1,2, Xuyou Li 1, Xiaoying Kong 2 1. College of Automation, Harbin Engineering University, Harbin, China 2. School of Computing
Analysis on GNSS Receiver with the Principles of Signal and Information Lishu Guo 1,2, Xuyou Li 1, Xiaoying Kong 2 1. College of Automation, Harbin Engineering University, Harbin, China 2. School of Computing
Satellite Navigation Integrity and integer ambiguity resolution
 Satellite Navigation Integrity and integer ambiguity resolution Picture: ESA AE4E08 Sandra Verhagen Course 2010 2011, lecture 12 1 Today s topics Integrity and RAIM Integer Ambiguity Resolution Study Section
Satellite Navigation Integrity and integer ambiguity resolution Picture: ESA AE4E08 Sandra Verhagen Course 2010 2011, lecture 12 1 Today s topics Integrity and RAIM Integer Ambiguity Resolution Study Section
GPS data correction using encoders and INS sensors
 GPS data correction using encoders and INS sensors Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, Avenue de la Renaissance 30, 1000 Brussels, Belgium sidahmed.berrabah@rma.ac.be
GPS data correction using encoders and INS sensors Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, Avenue de la Renaissance 30, 1000 Brussels, Belgium sidahmed.berrabah@rma.ac.be
Design and Implementation of Inertial Navigation System
 Design and Implementation of Inertial Navigation System Ms. Pooja M Asangi PG Student, Digital Communicatiom Department of Telecommunication CMRIT College Bangalore, India Mrs. Sujatha S Associate Professor
Design and Implementation of Inertial Navigation System Ms. Pooja M Asangi PG Student, Digital Communicatiom Department of Telecommunication CMRIT College Bangalore, India Mrs. Sujatha S Associate Professor
Future Dual Systems for Landing. The DGNSS PALS opportunity Marco Donfrancesco Intelligence & Cyber EW Sales & Mktg
 Future Dual Systems for Landing. The DGNSS PALS opportunity Marco Donfrancesco Intelligence & Cyber EW Sales & Mktg SG-175 DGNSS PALS study The study shall provide technical advice on the data link capabilities
Future Dual Systems for Landing. The DGNSS PALS opportunity Marco Donfrancesco Intelligence & Cyber EW Sales & Mktg SG-175 DGNSS PALS study The study shall provide technical advice on the data link capabilities
The Possibility of Precise Automobile Navigation using GPS/QZS L5 and (Galileo E5) Pseudo ranges
 Pseudo ranges") The Possibility of Precise Automobile Navigation using GPS/QZS L5 and (Galileo E5 Pseudo ranges ION ITM ITM 013 Hiroko Tokura, Taro Suzuki, Tomoji Takasu, Nobuaki Kubo (Tokyo University of Marine Scienceand
The Possibility of Precise Automobile Navigation using GPS/QZS L5 and (Galileo E5 Pseudo ranges ION ITM ITM 013 Hiroko Tokura, Taro Suzuki, Tomoji Takasu, Nobuaki Kubo (Tokyo University of Marine Scienceand
Clock Synchronization of Pseudolite Using Time Transfer Technique Based on GPS Code Measurement
 , pp.35-40 http://dx.doi.org/10.14257/ijseia.2014.8.4.04 Clock Synchronization of Pseudolite Using Time Transfer Technique Based on GPS Code Measurement Soyoung Hwang and Donghui Yu* Department of Multimedia
, pp.35-40 http://dx.doi.org/10.14257/ijseia.2014.8.4.04 Clock Synchronization of Pseudolite Using Time Transfer Technique Based on GPS Code Measurement Soyoung Hwang and Donghui Yu* Department of Multimedia