Actuators. DC Motor Servo Motor Stepper Motor. Sensors
|
|
|
- Brett Curtis
- 5 years ago
- Views:
Transcription

1
2 Actuators Sensors 2
3 Actuators DC Motor Servo Motor Stepper Motor Sensors 3

4 1. The stator generates a stationary magnetic field surrounding the rotor. 2. The rotor/armature is composed of a coil which generates a magnetic field when electricity flows through it. 3. The brushes provide mechanical contact between the rotor and the commutators and help switch polarity of rotor windings. 4. Commutators reverse the current every half a cycle to keep the motors turning.
5 Operating Voltage: 3-12 V At 6 V operation: Free run speed: 11,500 RPM Unloaded current: 70 ma Stall current: 800 ma ~0.5 oz-in torque 5
6 DC motors spin too fast with too little torque Gears slow the load rotation and increase torque motor load 6
7 Gear trains reduce speed and magnify torque. The gear ratio is the ratio of number of teeth on driver gear A to those on driven gear B: GR = number of teeth on gear A number of teeth on gear B
8 The gear ratio is also proportional to the ratio of radii: GR = r A r B The surface speeds at the point of contact of the gears must be identical, so Therefore, v A = v B ω A r A = ω B r B GR = n A n B = r A r B = ω B ω A

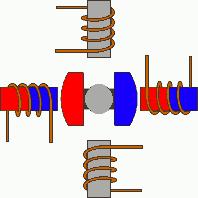
9 Gear Ratio: Final to Blue1 36:12 Blue1 to Blue2 36:12 Blue2 to Crow 36:12 Crown to Pinion 34:8 Total: :1 pololu.com 9
10 Motors require large current to operate But Arduino outputs only offer 40 ma H-Bridges are used to drive the large current A B C D Motor ON OFF OFF ON Forward OFF ON ON OFF Backward ON OFF ON OFF Brake OFF OFF OFF OFF Coast ON ON OFF OFF H-Bridge Magic Smoke A B V motor M C D 10
11 Dual H-Bridge is easy to control with digital logic V CC1 = Logic Supply (5V) V CC2 = Motor Supply ( V) 12En 1A 2A Motor 0 X X Coast Brake 1 6 V) 0 1 Backward Forward 1Y M 2Y Brake Contains two H-Bridges to drive two motors 11
12 12
13 #define LEN 6 #define LPLUS 9 #define LMINUS 8 void forward(void) { digitalwrite(len, 1); digitalwrite(lplus, 1); digitalwrite(lminus, 0); // similar for right motor } 13
 to shaft Resistance varies as shaft turns http://www.bogan.ca/astro/telescopes/digtcrcl.")
14 Sometimes it helps to know the position of the motor Optical shaft encoder Disk with slits attached to motor shaft Light and optical sensor on opposite sides of disk Count light pulses as the disk rotates Analog shaft encoder Connect potentiometer (variable resistor) to shaft Resistance varies as shaft turns 14

15 Servo motors are designed to be easy to use DC motor Gearing Analog shaft encoder Control circuitry High-current driver Three wires: 5V, GND, Control servocity.com Turn from 0 to 180 degrees Position determined by pulses on control wire 15
16 Control position with 50 Hz (20 ms) pulses Pulse width modulation (PWM) 1 ms = ms = 90 2 ms = 180 servocity.com 16
17 V Operation At 4.8 V Speed: 0.12 sec / 60 degrees (83 RPM) Stall Torque: 16.7 oz-in hobbypartz.com 17
18 Arduino offers a servo library for controlling servos // servotest.ino // David_Harris@hmc.edu 1 October 2011 #include <Servo.h> // pins #define SERVOPIN 10 // Global variable for the servo information Servo servo; void testservo() { initservo(); servo.write(90); // set angle between 0 and 180 degrees } void initservo() { pinmode(servopin, OUTPUT); servo.attach(servopin); } 18


19 Stepper motors are also popular Motor advances in discrete steps Input pulses indicate when to advance Example: Pololu 1207 Stepper Motor 1.8 steps (200 steps/revolution) V 9 oz-in holding torque Needs H-Bridge driver Ground C and D Alternate pulses to A and B 19
20 20
21 Actuators Sensors Phototransistor Reflectance Sensor IR Distance Sensor Contact Switch Other Sensors 21


22 Converts light to electrical current Vishay BPW77NA NPN Phototransistor Dark current: na Angle of half sensitivity: ±10 jameco.com vishay.com 22
23 V out = 5 I photo 330 kw In dark, V out 5 V For I photo > 15 µa, V out drops to ~0 Large resistor gives sensitivity to weak light 23
 fairchild.")
24 Infrared LED and phototransistor pair LED illuminates surface Phototransistor receives reflected light Daylight filter on sensor reduces interference Sensitive to distance, color, reflectivity Fairchild QRD1114 Reflectance Sensor ~20 ma LED current 1.7 V LED ON voltage 940 nm wavelength (near infrared) fairchild.com 24
25 I LED = (5-1.7 V) / 220 W = 15 ma V out = 5 I photo 10 kw Resistor was selected to give a good range of response 25

26 Sharp GP2Y0A21YK0F Range of 8 to 60 Triangulates with linear CCD array Three terminals: 5V, GND, Signal 26

27 Measure flight time of ultrasonic pulse Less sensitive to ambient light More precise More expensive Example: LV-MaxSonar-EZ 42 KHz ultrasonic beam Range of 254 with resolution of V operation Analog voltage output maxbotix.com 27

28 Switches are useful for proximity detection Three terminals COM: Common NO: Normally Open NC: Normally Closed To Digital Input Mounting issues Good supporting surface Gang 2 or more with plate between +5 sparkfun.com 28
29 Track your position Watch for operating voltage and analog/digital interface Some of these sensors are expensive! Sparkfun HMC6352 Digital Compass MLX90609 Single Axis Gyroscope ITG-3200 Triple Axis Gyroscope ADXL322 Dual Axis Accelerometer Inertial Measurement Units 29
30 Sensors are subject to noise Average multiple readings for more stable results 30
31 Secure mounting is half the challenge Poorly mounted sensors will fail at an inopportune time Tangles of cables will catch on obstructions and pull loose High center of gravity leads bots to topple in collisions Consider building a custom mount Machine shop 3D printer Use Breadboard to test electronics Solder final electronics onto front of Mudduino for security 31
32 Cynoacrylate (CA) Glue (aka Super Glue) Fast drying, good for bonding plastic Low shear strength Don t bond your fingers wear gloves Hot Glue Electrical Tape Insulator, low strength Gaffer s Tape Like duct tape, but stronger and removes cleanly 32
33 Engineering Stockroom Hobbyist Pegasus Hobbies 5515 Moreno St., Montclair, an easy bike ride from campus Sparkfun Pololu Jameco All Electronics, Futurlec, Inventables, Goldmine Electronics, Professional DigiKey (very wide selection, fewer hobby parts, higher cost) 33
34 On-Board Actuators: Twin DC Motors + Gearbox Servo Motor On-Board Sensors: Phototransistor (A5) Reflectance Sensor (A4) Distance Sensor (A0) Some E11 stock of various sensors Boundless possibilities! 34
35 Bring your laptop, robot, and programming cable to the rest of the lab sessions this fall Pick your partner for Lab 6 & Final Project Write partner names on sign-up sheet Rank order all lab sections both you and your partner can make (leave blank those you cannot make) 35
E11 Lecture 11: Sensors & Actuators. Profs. David Money Harris & Sarah Harris Fall 2011
 E11 Lecture 11: Sensors & Actuators Profs. David Money Harris & Sarah Harris Fall 2011 Outline Actuators DC Motor Servo Motor Stepper Motor Sensors Phototransistor Reflectance Sensor IR Distance Sensor
E11 Lecture 11: Sensors & Actuators Profs. David Money Harris & Sarah Harris Fall 2011 Outline Actuators DC Motor Servo Motor Stepper Motor Sensors Phototransistor Reflectance Sensor IR Distance Sensor
1. Controlling the DC Motors
 E11: Autonomous Vehicles Lab 5: Motors and Sensors By this point, you should have an assembled robot and Mudduino to power it. Let s get things moving! In this lab, you will write code to test your motors
E11: Autonomous Vehicles Lab 5: Motors and Sensors By this point, you should have an assembled robot and Mudduino to power it. Let s get things moving! In this lab, you will write code to test your motors
Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators
 Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators Ahmed Okasha, Assistant Lecturer okasha1st@gmail.com Objective Have a
Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators Ahmed Okasha, Assistant Lecturer okasha1st@gmail.com Objective Have a
Administrative Notes. DC Motors; Torque and Gearing; Encoders; Motor Control. Today. Early DC Motors. Friday 1pm: Communications lecture
 At Actuation: ti DC Motors; Torque and Gearing; Encoders; Motor Control RSS Lecture 3 Wednesday, 11 Feb 2009 Prof. Seth Teller Administrative Notes Friday 1pm: Communications lecture Discuss: writing up
At Actuation: ti DC Motors; Torque and Gearing; Encoders; Motor Control RSS Lecture 3 Wednesday, 11 Feb 2009 Prof. Seth Teller Administrative Notes Friday 1pm: Communications lecture Discuss: writing up
Sensors and Actuators
 Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-4015 Sensors and Actuators Robotics for Computer Engineering students A.A.
Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-4015 Sensors and Actuators Robotics for Computer Engineering students A.A.
Using Servos with an Arduino
 Using Servos with an Arduino ME 120 Mechanical and Materials Engineering Portland State University http://web.cecs.pdx.edu/~me120 Learning Objectives Be able to identify characteristics that distinguish
Using Servos with an Arduino ME 120 Mechanical and Materials Engineering Portland State University http://web.cecs.pdx.edu/~me120 Learning Objectives Be able to identify characteristics that distinguish
Understanding RC Servos and DC Motors
 Understanding RC Servos and DC Motors What You ll Learn How an RC servo and DC motor operate Understand the electrical and mechanical details How to interpret datasheet specifications and properly apply
Understanding RC Servos and DC Motors What You ll Learn How an RC servo and DC motor operate Understand the electrical and mechanical details How to interpret datasheet specifications and properly apply
MICROCONTROLLERS Stepper motor control with Sequential Logic Circuits
 PH-315 MICROCONTROLLERS Stepper motor control with Sequential Logic Circuits Portland State University Summary Four sequential digital waveforms are used to control a stepper motor. The main objective
PH-315 MICROCONTROLLERS Stepper motor control with Sequential Logic Circuits Portland State University Summary Four sequential digital waveforms are used to control a stepper motor. The main objective
L E C T U R E R, E L E C T R I C A L A N D M I C R O E L E C T R O N I C E N G I N E E R I N G
 P R O F. S L A C K L E C T U R E R, E L E C T R I C A L A N D M I C R O E L E C T R O N I C E N G I N E E R I N G G B S E E E @ R I T. E D U B L D I N G 9, O F F I C E 0 9-3 1 8 9 ( 5 8 5 ) 4 7 5-5 1 0
P R O F. S L A C K L E C T U R E R, E L E C T R I C A L A N D M I C R O E L E C T R O N I C E N G I N E E R I N G G B S E E E @ R I T. E D U B L D I N G 9, O F F I C E 0 9-3 1 8 9 ( 5 8 5 ) 4 7 5-5 1 0
CONSTRUCTION GUIDE Robotic Arm. Robobox. Level II
 CONSTRUCTION GUIDE Robotic Arm Robobox Level II Robotic Arm This month s robot is a robotic arm with two degrees of freedom that will teach you how to use motors. You will then be able to move the arm
CONSTRUCTION GUIDE Robotic Arm Robobox Level II Robotic Arm This month s robot is a robotic arm with two degrees of freedom that will teach you how to use motors. You will then be able to move the arm
Learning Objectives. References 10/26/11. Using servos with an Arduino. EAS 199A Fall 2011
 Using servos with an Arduino EAS 199A Fall 2011 Learning Objectives Be able to identify characteristics that distinguish a servo and a DC motor Be able to describe the difference a conventional servo and
Using servos with an Arduino EAS 199A Fall 2011 Learning Objectives Be able to identify characteristics that distinguish a servo and a DC motor Be able to describe the difference a conventional servo and
Lab Exercise 9: Stepper and Servo Motors
 ME 3200 Mechatronics Laboratory Lab Exercise 9: Stepper and Servo Motors Introduction In this laboratory exercise, you will explore some of the properties of stepper and servomotors. These actuators are
ME 3200 Mechatronics Laboratory Lab Exercise 9: Stepper and Servo Motors Introduction In this laboratory exercise, you will explore some of the properties of stepper and servomotors. These actuators are
Design with Microprocessors Year III Computer Science 1-st Semester
 Design with Microprocessors Year III Computer Science 1-st Semester Lecture 9: Microcontroller based applications: usage of sensors and actuators (motors) DC motor control Diligent MT motor/gearbox 1/19
Design with Microprocessors Year III Computer Science 1-st Semester Lecture 9: Microcontroller based applications: usage of sensors and actuators (motors) DC motor control Diligent MT motor/gearbox 1/19
Schematics for Breakout Examples
 Schematics for Breakout Examples This document contains wiring diagrams and component lists for the examples. A diagram may be used for more than one example file. The corresponding files are listed for
Schematics for Breakout Examples This document contains wiring diagrams and component lists for the examples. A diagram may be used for more than one example file. The corresponding files are listed for
2.017 DESIGN OF ELECTROMECHANICAL ROBOTIC SYSTEMS Fall 2009 Lab 4: Motor Control. October 5, 2009 Dr. Harrison H. Chin
 2.017 DESIGN OF ELECTROMECHANICAL ROBOTIC SYSTEMS Fall 2009 Lab 4: Motor Control October 5, 2009 Dr. Harrison H. Chin Formal Labs 1. Microcontrollers Introduction to microcontrollers Arduino microcontroller
2.017 DESIGN OF ELECTROMECHANICAL ROBOTIC SYSTEMS Fall 2009 Lab 4: Motor Control October 5, 2009 Dr. Harrison H. Chin Formal Labs 1. Microcontrollers Introduction to microcontrollers Arduino microcontroller
Assembly Language. Topic 14 Motion Control. Stepper and Servo Motors
 Assembly Language Topic 14 Motion Control Stepper and Servo Motors Objectives To gain an understanding of the operation of a stepper motor To develop a means to control a stepper motor To gain an understanding
Assembly Language Topic 14 Motion Control Stepper and Servo Motors Objectives To gain an understanding of the operation of a stepper motor To develop a means to control a stepper motor To gain an understanding
Brushed DC Motor Microcontroller PWM Speed Control with Optical Encoder and H-Bridge
 Brushed DC Motor Microcontroller PWM Speed Control with Optical Encoder and H-Bridge L298 Full H-Bridge HEF4071B OR Gate Brushed DC Motor with Optical Encoder & Load Inertia Flyback Diodes Arduino Microcontroller
Brushed DC Motor Microcontroller PWM Speed Control with Optical Encoder and H-Bridge L298 Full H-Bridge HEF4071B OR Gate Brushed DC Motor with Optical Encoder & Load Inertia Flyback Diodes Arduino Microcontroller
ECE 477 Digital Systems Senior Design Project Rev 8/09. Homework 5: Theory of Operation and Hardware Design Narrative
 ECE 477 Digital Systems Senior Design Project Rev 8/09 Homework 5: Theory of Operation and Hardware Design Narrative Team Code Name: _ATV Group No. 3 Team Member Completing This Homework: Sebastian Hening
ECE 477 Digital Systems Senior Design Project Rev 8/09 Homework 5: Theory of Operation and Hardware Design Narrative Team Code Name: _ATV Group No. 3 Team Member Completing This Homework: Sebastian Hening
Tektronix AFG10022 Function Generator. Coming soon to B10: Sin, Square, Ramp, Swept, Arbitrary, Noise. Linear Actuators. Non-magnetized iron plunger
 4/19/18 Tektronix AFG10022 Function Generator Coming soon to B10: Sin, Square, Ramp, Swept, Arbitrary, Noise 508 Linear Actuators Solenoids (stationary coil) Non-magnetized iron plunger Iron always pulled
4/19/18 Tektronix AFG10022 Function Generator Coming soon to B10: Sin, Square, Ramp, Swept, Arbitrary, Noise 508 Linear Actuators Solenoids (stationary coil) Non-magnetized iron plunger Iron always pulled
Sensors and Sensing Motors, Encoders and Motor Control
 Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 13.11.2014
Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 13.11.2014
Brushed DC Motor PWM Speed Control with the NI myrio, Optical Encoder, and H-Bridge
 Brushed DC Motor PWM Speed Control with the NI myrio, Optical Encoder, and H-Bridge Motor Controller Brushed DC Motor / Encoder System K. Craig 1 Gnd 5 V OR Gate H-Bridge 12 V Bypass Capacitors Flyback
Brushed DC Motor PWM Speed Control with the NI myrio, Optical Encoder, and H-Bridge Motor Controller Brushed DC Motor / Encoder System K. Craig 1 Gnd 5 V OR Gate H-Bridge 12 V Bypass Capacitors Flyback
DC motor control using arduino
 DC motor control using arduino 1) Introduction: First we need to differentiate between DC motor and DC generator and where we can use it in this experiment. What is the main different between the DC-motor,
DC motor control using arduino 1) Introduction: First we need to differentiate between DC motor and DC generator and where we can use it in this experiment. What is the main different between the DC-motor,
Sensors and Sensing Motors, Encoders and Motor Control
 Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 05.11.2015
Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 05.11.2015
Brushed DC Motor System
 Brushed DC Motor System Pittman DC Servo Motor Schematic Brushed DC Motor Brushed DC Motor System K. Craig 1 Topics Brushed DC Motor Physical & Mathematical Modeling Hardware Parameters Model Hardware
Brushed DC Motor System Pittman DC Servo Motor Schematic Brushed DC Motor Brushed DC Motor System K. Craig 1 Topics Brushed DC Motor Physical & Mathematical Modeling Hardware Parameters Model Hardware
Electronic Systems - B1 23/04/ /04/ SisElnB DDC. Chapter 2
 Politecnico di Torino - ICT school Goup B - goals ELECTRONIC SYSTEMS B INFORMATION PROCESSING B.1 Systems, sensors, and actuators» System block diagram» Analog and digital signals» Examples of sensors»
Politecnico di Torino - ICT school Goup B - goals ELECTRONIC SYSTEMS B INFORMATION PROCESSING B.1 Systems, sensors, and actuators» System block diagram» Analog and digital signals» Examples of sensors»
ELECTRONIC SYSTEMS. Introduction. B1 - Sensors and actuators. Introduction
 Politecnico di Torino - ICT school Goup B - goals ELECTRONIC SYSTEMS B INFORMATION PROCESSING B.1 Systems, sensors, and actuators» System block diagram» Analog and digital signals» Examples of sensors»
Politecnico di Torino - ICT school Goup B - goals ELECTRONIC SYSTEMS B INFORMATION PROCESSING B.1 Systems, sensors, and actuators» System block diagram» Analog and digital signals» Examples of sensors»
Job Sheet 2 Servo Control
 Job Sheet 2 Servo Control Electrical actuators are replacing hydraulic actuators in many industrial applications. Electric servomotors and linear actuators can perform many of the same physical displacement
Job Sheet 2 Servo Control Electrical actuators are replacing hydraulic actuators in many industrial applications. Electric servomotors and linear actuators can perform many of the same physical displacement
THE IMPORTANCE OF PLANNING AND DRAWING IN DESIGN
 PROGRAM OF STUDY ENGR.ROB Standard 1 Essential UNDERSTAND THE IMPORTANCE OF PLANNING AND DRAWING IN DESIGN The student will understand and implement the use of hand sketches and computer-aided drawing
PROGRAM OF STUDY ENGR.ROB Standard 1 Essential UNDERSTAND THE IMPORTANCE OF PLANNING AND DRAWING IN DESIGN The student will understand and implement the use of hand sketches and computer-aided drawing
Figure 1. Digilent DC Motor
 Laboratory 9 - Usage of DC- and servo-motors The current laboratory describes the usage of DC and servomotors 1. DC motors Figure 1. Digilent DC Motor Classical DC motors are converting electrical energy
Laboratory 9 - Usage of DC- and servo-motors The current laboratory describes the usage of DC and servomotors 1. DC motors Figure 1. Digilent DC Motor Classical DC motors are converting electrical energy
Electronics, Sensors, and Actuators
 Electronics, Sensors, and Actuators 4/14/15 David Flicker BE107 Overview Basic electronics and components Sensors Actuators Electronics 101 Voltage, V, is fundamentally how much energy is gained or lost
Electronics, Sensors, and Actuators 4/14/15 David Flicker BE107 Overview Basic electronics and components Sensors Actuators Electronics 101 Voltage, V, is fundamentally how much energy is gained or lost
University of Florida Department of Electrical and Computer Engineering Intelligent Machine Design Laboratory EEL 4665 Spring 2013 LOSAT
 University of Florida Department of Electrical and Computer Engineering Intelligent Machine Design Laboratory EEL 4665 Spring 2013 LOSAT Brandon J. Patton Instructors: Drs. Antonio Arroyo and Eric Schwartz
University of Florida Department of Electrical and Computer Engineering Intelligent Machine Design Laboratory EEL 4665 Spring 2013 LOSAT Brandon J. Patton Instructors: Drs. Antonio Arroyo and Eric Schwartz
30-80V, 8.2A Peak, No Tuning, Nulls loss of Synchronization
 2-phase Hybrid Servo Drive 30-80V, 8.2A Peak, No Tuning, Nulls loss of Synchronization Closed-loop, eliminates loss of synchronization Broader operating range higher torque and higher speed Reduced motor
2-phase Hybrid Servo Drive 30-80V, 8.2A Peak, No Tuning, Nulls loss of Synchronization Closed-loop, eliminates loss of synchronization Broader operating range higher torque and higher speed Reduced motor
Project 27 Joystick Servo Control
 Project 27 Joystick Servo Control For another simple project, let s use a joystick to control the two servos. You ll arrange the servos in such a way that you get a pan-tilt head, such as is used for CCTV
Project 27 Joystick Servo Control For another simple project, let s use a joystick to control the two servos. You ll arrange the servos in such a way that you get a pan-tilt head, such as is used for CCTV
Autonomous Following RObot Initial Design Review
 Autonomous Following RObot Initial Design Review James Tse (Leader) Wei Dai Travis Frecker Peter Verlangieri Professor John Johnson ECE 189A Fall 2012 Initial Design Review: Project Description Original
Autonomous Following RObot Initial Design Review James Tse (Leader) Wei Dai Travis Frecker Peter Verlangieri Professor John Johnson ECE 189A Fall 2012 Initial Design Review: Project Description Original
DeviceCraft Revision #1 11/29/2010
 DeviceCraft Revision #1 11/29/2010 DC Wiper Motor H-Bridge Servo / Speed Controller P/N 1020 Features: Dip Switch selectable mode of operation Both PID servo or speed controller Forward/Reverse operation
DeviceCraft Revision #1 11/29/2010 DC Wiper Motor H-Bridge Servo / Speed Controller P/N 1020 Features: Dip Switch selectable mode of operation Both PID servo or speed controller Forward/Reverse operation
PRESENTED BY HUMANOID IIT KANPUR
 SENSORS & ACTUATORS Robotics Club (Science and Technology Council, IITK) PRESENTED BY HUMANOID IIT KANPUR October 11th, 2017 WHAT ARE WE GOING TO LEARN!! COMPARISON between Transducers Sensors And Actuators.
SENSORS & ACTUATORS Robotics Club (Science and Technology Council, IITK) PRESENTED BY HUMANOID IIT KANPUR October 11th, 2017 WHAT ARE WE GOING TO LEARN!! COMPARISON between Transducers Sensors And Actuators.
Autonomous Following RObot Critical Design Review
 Autonomous Following RObot Critical Design Review James Tse (Leader) Wei Dai Travis Frecker Peter Verlangieri Professor John Johnson ECE 189A Fall 2012 Critical Design Review: Project Description A robot
Autonomous Following RObot Critical Design Review James Tse (Leader) Wei Dai Travis Frecker Peter Verlangieri Professor John Johnson ECE 189A Fall 2012 Critical Design Review: Project Description A robot
Electronic Speed Controls and RC Motors
 Electronic Speed Controls and RC Motors ESC Power Control Modern electronic speed controls regulate the electric power applied to an electric motor by rapidly switching the power on and off using power
Electronic Speed Controls and RC Motors ESC Power Control Modern electronic speed controls regulate the electric power applied to an electric motor by rapidly switching the power on and off using power
Pololu Dual G2 High-Power Motor Driver for Raspberry Pi
 Pololu Dual G2 High-Power Motor Driver for Raspberry Pi 24v14 /POLOLU 3752 18v18 /POLOLU 3750 18v22 /POLOLU 3754 This add-on board makes it easy to control two highpower DC motors with a Raspberry Pi.
Pololu Dual G2 High-Power Motor Driver for Raspberry Pi 24v14 /POLOLU 3752 18v18 /POLOLU 3750 18v22 /POLOLU 3754 This add-on board makes it easy to control two highpower DC motors with a Raspberry Pi.
Speed Control of DC Motor Using Microcontroller
 2015 IJSRST Volume 1 Issue 2 Print ISSN: 2395-6011 Online ISSN: 2395-602X Themed Section: Science Speed Control of DC Motor Using Microcontroller Katke S.P *1, Rangdal S.M 2 * 1 Electrical Department,
2015 IJSRST Volume 1 Issue 2 Print ISSN: 2395-6011 Online ISSN: 2395-602X Themed Section: Science Speed Control of DC Motor Using Microcontroller Katke S.P *1, Rangdal S.M 2 * 1 Electrical Department,
Using Transistors and Driving Motors
 Chapter 4 Using Transistors and Driving Motors Parts You ll Need for This Chapter: Arduino Uno USB cable 9V battery 9V battery clip 5V L4940V5 linear regulator 22uF electrolytic capacitor.1uf electrolytic
Chapter 4 Using Transistors and Driving Motors Parts You ll Need for This Chapter: Arduino Uno USB cable 9V battery 9V battery clip 5V L4940V5 linear regulator 22uF electrolytic capacitor.1uf electrolytic
Motors and Servos Part 2: DC Motors
 Motors and Servos Part 2: DC Motors Back to Motors After a brief excursion into serial communication last week, we are returning to DC motors this week. As you recall, we have already worked with servos
Motors and Servos Part 2: DC Motors Back to Motors After a brief excursion into serial communication last week, we are returning to DC motors this week. As you recall, we have already worked with servos
ES86 Series Closed-loop Stepper Drive + Motor System (Drive+ Motor/Encoder)
") ES86 Series Closed-loop Stepper Drive + Motor System (Drive+ Motor/Encoder) Traditional stepper motor drive systems operate open loop providing position control without feedback. However, because of this,
ES86 Series Closed-loop Stepper Drive + Motor System (Drive+ Motor/Encoder) Traditional stepper motor drive systems operate open loop providing position control without feedback. However, because of this,
Dimensions: Specifications:
 Rover 5 Rover 5 is a new breed of tracked robot chassis designed specifically for students and hobbyist. Unlike conventional tracked chassis s the clearance can be adjusted by rotating the gearboxes in
Rover 5 Rover 5 is a new breed of tracked robot chassis designed specifically for students and hobbyist. Unlike conventional tracked chassis s the clearance can be adjusted by rotating the gearboxes in
Inductance, capacitance and resistance
 Inductance, capacitance and resistance As previously discussed inductors and capacitors create loads on a circuit. This is called reactance. It varies depending on current and frequency. At no frequency,
Inductance, capacitance and resistance As previously discussed inductors and capacitors create loads on a circuit. This is called reactance. It varies depending on current and frequency. At no frequency,
AC Drive Technology. An Overview for the Converting Industry. Siemens Industry, Inc All rights reserved.
 AC Drive Technology An Overview for the Converting Industry www.usa.siemens.com/converting Siemens Industry, Inc. 2016 All rights reserved. Answers for industry. AC Drive Technology Drive Systems AC Motors
AC Drive Technology An Overview for the Converting Industry www.usa.siemens.com/converting Siemens Industry, Inc. 2016 All rights reserved. Answers for industry. AC Drive Technology Drive Systems AC Motors
Basic NC and CNC. Dr. J. Ramkumar Professor, Department of Mechanical Engineering Micro machining Lab, I.I.T. Kanpur
 Basic NC and CNC Dr. J. Ramkumar Professor, Department of Mechanical Engineering Micro machining Lab, I.I.T. Kanpur Micro machining Lab, I.I.T. Kanpur Outline 1. Introduction to CNC machine 2. Component
Basic NC and CNC Dr. J. Ramkumar Professor, Department of Mechanical Engineering Micro machining Lab, I.I.T. Kanpur Micro machining Lab, I.I.T. Kanpur Outline 1. Introduction to CNC machine 2. Component
Bill of Materials: PWM Stepper Motor Driver PART NO
 PWM Stepper Motor Driver PART NO. 2183816 Control a stepper motor using this circuit and a servo PWM signal from an R/C controller, arduino, or microcontroller. Onboard circuitry limits winding current,
PWM Stepper Motor Driver PART NO. 2183816 Control a stepper motor using this circuit and a servo PWM signal from an R/C controller, arduino, or microcontroller. Onboard circuitry limits winding current,
ELECTRONIC CONTROL OF A.C. MOTORS
 CONTENTS C H A P T E R46 Learning Objectives es Classes of Electronic AC Drives Variable Frequency Speed Control of a SCIM Variable Voltage Speed Control of a SCIM Chopper Speed Control of a WRIM Electronic
CONTENTS C H A P T E R46 Learning Objectives es Classes of Electronic AC Drives Variable Frequency Speed Control of a SCIM Variable Voltage Speed Control of a SCIM Chopper Speed Control of a WRIM Electronic
As before, the speed resolution is given by the change in speed corresponding to a unity change in the count. Hence, for the pulse-counting method
 Velocity Resolution with Step-Up Gearing: As before, the speed resolution is given by the change in speed corresponding to a unity change in the count. Hence, for the pulse-counting method It follows that
Velocity Resolution with Step-Up Gearing: As before, the speed resolution is given by the change in speed corresponding to a unity change in the count. Hence, for the pulse-counting method It follows that
combine regular DC-motors with a gear-box and an encoder/potentiometer to form a position control loop can only assume a limited range of angular
 Embedded Control Applications II MP10-1 Embedded Control Applications II MP10-2 week lecture topics 10 Embedded Control Applications II - Servo-motor control - Stepper motor control - The control of a
Embedded Control Applications II MP10-1 Embedded Control Applications II MP10-2 week lecture topics 10 Embedded Control Applications II - Servo-motor control - Stepper motor control - The control of a
Robot Actuators. Motors and Control. Stepper Motor Basics. Increased Resolution. Stepper motors. DC motors AC motors. Physics review: Nature is lazy.
 obot Actuators tepper motors Motors and Control DC motors AC motors Physics review: ature is lazy. Things seek lowest energy states. iron core vs. magnet magnetic fields tend to line up Electric fields
obot Actuators tepper motors Motors and Control DC motors AC motors Physics review: ature is lazy. Things seek lowest energy states. iron core vs. magnet magnetic fields tend to line up Electric fields
ES86 Series Closed-loop Stepper Drive + Motor System (Drive+ Motor/Encoder)
") ES86 Series Closed-loop Stepper Drive + Motor System (Drive+ Motor/Encoder) Traditional stepper motor drive systems operate open loop providing position control without feedback. However, because of this,
ES86 Series Closed-loop Stepper Drive + Motor System (Drive+ Motor/Encoder) Traditional stepper motor drive systems operate open loop providing position control without feedback. However, because of this,
WELCOME TO THE SEMINAR ON INTRODUCTION TO ROBOTICS
 WELCOME TO THE SEMINAR ON INTRODUCTION TO ROBOTICS Introduction to ROBOTICS Get started with working with Electronic circuits. Helping in building a basic line follower Understanding more about sensors
WELCOME TO THE SEMINAR ON INTRODUCTION TO ROBOTICS Introduction to ROBOTICS Get started with working with Electronic circuits. Helping in building a basic line follower Understanding more about sensors
Feedback Devices. By John Mazurkiewicz. Baldor Electric
 Feedback Devices By John Mazurkiewicz Baldor Electric Closed loop systems use feedback signals for stabilization, speed and position information. There are a variety of devices to provide this data, such
Feedback Devices By John Mazurkiewicz Baldor Electric Closed loop systems use feedback signals for stabilization, speed and position information. There are a variety of devices to provide this data, such
Shock Sensor Module This module is digital shock sensor. It will output a high level signal when it detects a shock event.
 Item Picture Description KY001: Temperature This module measures the temperature and reports it through the 1-wire bus digitally to the Arduino. DS18B20 (https://s3.amazonaws.com/linksprite/arduino_kits/advanced_sensors_kit/ds18b20.pdf)
Item Picture Description KY001: Temperature This module measures the temperature and reports it through the 1-wire bus digitally to the Arduino. DS18B20 (https://s3.amazonaws.com/linksprite/arduino_kits/advanced_sensors_kit/ds18b20.pdf)
ANGULAR POSITION CONTROL OF DC MOTOR USING SHORTEST PATH ALGORITHM
 EE 712 Embedded Systems Design, Lab Project Report, EE Dept. IIT Bombay, April 2006. ANGULAR POSITION CONTROL OF DC MOTOR USING SHORTEST PATH ALGORITHM Group Number: 17 Rupesh Sonu Kakade (05323014)
EE 712 Embedded Systems Design, Lab Project Report, EE Dept. IIT Bombay, April 2006. ANGULAR POSITION CONTROL OF DC MOTOR USING SHORTEST PATH ALGORITHM Group Number: 17 Rupesh Sonu Kakade (05323014)
Convert a Hitec HS-300 Servo to Continuous Operation
 Site Map Shopping Cart Engineering Services Contact US Home Dios and Athena KRMx01 Mechanics Projects Downloads Forums GAN116_hs300 Convert a Hitec HS-300 Servo to Continuous Operation By Michael Simpson
Site Map Shopping Cart Engineering Services Contact US Home Dios and Athena KRMx01 Mechanics Projects Downloads Forums GAN116_hs300 Convert a Hitec HS-300 Servo to Continuous Operation By Michael Simpson
Data Sheet. HEDL-65xx, HEDM-65xx, HEDS-65xx Series Large Diameter (56 mm), Housed Two and Three Channel Optical Encoders. Description.
, Housed Two and Three Channel Optical Encoders. Description.") HEDL-65xx, HEDM-65xx, HEDS-65xx Series Large Diameter (56 mm), Housed Two and Three Channel Optical Encoders Data Sheet Description The HEDS-65xx/HEDL-65xx are high performance two and three channel optical
HEDL-65xx, HEDM-65xx, HEDS-65xx Series Large Diameter (56 mm), Housed Two and Three Channel Optical Encoders Data Sheet Description The HEDS-65xx/HEDL-65xx are high performance two and three channel optical
Tarocco Closed Loop Motor Controller
 Contents Safety Information... 3 Overview... 4 Features... 4 SoC for Closed Loop Control... 4 Gate Driver... 5 MOSFETs in H Bridge Configuration... 5 Device Characteristics... 6 Installation... 7 Motor
Contents Safety Information... 3 Overview... 4 Features... 4 SoC for Closed Loop Control... 4 Gate Driver... 5 MOSFETs in H Bridge Configuration... 5 Device Characteristics... 6 Installation... 7 Motor
Semiconductor 9/21/2015
 Semiconductor Electronics 9/21/2015 Starting simple the diode. The diode is one of the simplest semiconductor devices. It is comprised of two layers of semiconductor. One is impregnated with an electron
Semiconductor Electronics 9/21/2015 Starting simple the diode. The diode is one of the simplest semiconductor devices. It is comprised of two layers of semiconductor. One is impregnated with an electron
Position and Velocity Sensors
 Position and Velocity Sensors Introduction: A third type of sensor which is commonly used is a speed or position sensor. Position sensors are required when the location of an object is to be controlled.
Position and Velocity Sensors Introduction: A third type of sensor which is commonly used is a speed or position sensor. Position sensors are required when the location of an object is to be controlled.
Laboratory Exercise 1 Microcontroller Board with Driver Board
 Laboratory Exercise 1 Microcontroller Board with Driver Board The purpose of this lab exercises is to demonstrate how the Microcontroller Board can be used to control motors connected to the Driver Board
Laboratory Exercise 1 Microcontroller Board with Driver Board The purpose of this lab exercises is to demonstrate how the Microcontroller Board can be used to control motors connected to the Driver Board
o What happens if S1 and S2 or S3 and S4 are closed simultaneously? o Perform Motor Control, H-Bridges LAB 2 H-Bridges with SPST Switches
 Cornerstone Electronics Technology and Robotics II H-Bridges and Electronic Motor Control 4 Hour Class Administration: o Prayer o Debriefing Botball competition Four States of a DC Motor with Terminals
Cornerstone Electronics Technology and Robotics II H-Bridges and Electronic Motor Control 4 Hour Class Administration: o Prayer o Debriefing Botball competition Four States of a DC Motor with Terminals
Lab 5: Inverted Pendulum PID Control
 Lab 5: Inverted Pendulum PID Control In this lab we will be learning about PID (Proportional Integral Derivative) control and using it to keep an inverted pendulum system upright. We chose an inverted
Lab 5: Inverted Pendulum PID Control In this lab we will be learning about PID (Proportional Integral Derivative) control and using it to keep an inverted pendulum system upright. We chose an inverted
istand I can Stand SPECIAL SENSOR REPORT
 istand I can Stand SPECIAL SENSOR REPORT SUBRAT NAYAK UFID: 5095-9761 For EEL 5666 - Intelligent Machines Design Laboratory (Spring 2008) Department of Electrical and Computer Engineering University of
istand I can Stand SPECIAL SENSOR REPORT SUBRAT NAYAK UFID: 5095-9761 For EEL 5666 - Intelligent Machines Design Laboratory (Spring 2008) Department of Electrical and Computer Engineering University of
REFLECTIVE PHOTOSENSOR CIRCUIT MODULE KIT ASSEMBLY GUIDE
 Pages from Reflective Photosensor Circuit Module Kit Assembly Guide: REFLECTIVE PHOTOSENSOR CIRCUIT MODULE KIT Introduction: ASSEMBLY GUIDE The Reflective Photosensor Circuit Module is a compact 1.6" by
Pages from Reflective Photosensor Circuit Module Kit Assembly Guide: REFLECTIVE PHOTOSENSOR CIRCUIT MODULE KIT Introduction: ASSEMBLY GUIDE The Reflective Photosensor Circuit Module is a compact 1.6" by
n Measuring range ,02 N m to N m n Clockwise and counter-clockwise torque n Low linearity deviation of ± 0.05 % F.S.
 Precision Torque Sensor Non-contact transmission for rotating applications Optional measurement of angle and speed Model 8661 Code: Delivery: Warranty: 2-3 weeks 24 months Application The 8661 precision
Precision Torque Sensor Non-contact transmission for rotating applications Optional measurement of angle and speed Model 8661 Code: Delivery: Warranty: 2-3 weeks 24 months Application The 8661 precision
CL86T. 24~80VDC, 8.2A Peak, Closed-loop, No Tuning. Descriptions. Closed-loop. Stepper. Applications. Datasheet of the Closed-loop Stepper CL86T
 CL86T Closed-loop Stepper 24~80VDC, 8.2A Peak, Closed-loop, No Tuning Closed-loop, eliminates loss of synchronization Broader operating range higher torque and higher speed Reduced motor heating and more
CL86T Closed-loop Stepper 24~80VDC, 8.2A Peak, Closed-loop, No Tuning Closed-loop, eliminates loss of synchronization Broader operating range higher torque and higher speed Reduced motor heating and more
Real Time Embedded Systems. Lecture 1 January 17, 2012
 Electric Motors Real Time Embedded Systems www.atomicrhubarb.com/embedded Lecture 1 January 17, 2012 Topic Warning! This is a work in progress. Watch out for sharp corners and slippery surfaces Motors
Electric Motors Real Time Embedded Systems www.atomicrhubarb.com/embedded Lecture 1 January 17, 2012 Topic Warning! This is a work in progress. Watch out for sharp corners and slippery surfaces Motors
ECET 211 Electrical Machines and Controls
 ECET 211 Electrical Machines and Controls 2016/4/27 Class Review and Wrapping Up Comprehensive Exam, Friday, 1:00-3:00 PM, May 6, 2016 Close books/allow 1-page (8 x 11 and ½) hand-written review note,
ECET 211 Electrical Machines and Controls 2016/4/27 Class Review and Wrapping Up Comprehensive Exam, Friday, 1:00-3:00 PM, May 6, 2016 Close books/allow 1-page (8 x 11 and ½) hand-written review note,
ECET 211 Electric Machines & Controls Lecture 4-2 Motor Control Devices: Lecture 4 Motor Control Devices
 ECET 211 Electric Machines & Controls Lecture 4-2 Motor Control Devices: Part 3. Sensors, Part 4. Actuators Text Book: Electric Motors and Control Systems, by Frank D. Petruzella, published by McGraw Hill,
ECET 211 Electric Machines & Controls Lecture 4-2 Motor Control Devices: Part 3. Sensors, Part 4. Actuators Text Book: Electric Motors and Control Systems, by Frank D. Petruzella, published by McGraw Hill,
Mechanisms and Fabrication Part II ME2110 Spring 2019 Kyle Saleeby
 Mechanisms and Fabrication Part II ME2110 Spring 2019 Kyle Saleeby Mechanisms and Fabrication Part II Kyle Saleeby With much appreciation to Dr. Chris Saldana and Dr. Tom Kurfess ME2110 Spring 2019 Lesson
Mechanisms and Fabrication Part II ME2110 Spring 2019 Kyle Saleeby Mechanisms and Fabrication Part II Kyle Saleeby With much appreciation to Dr. Chris Saldana and Dr. Tom Kurfess ME2110 Spring 2019 Lesson
3.5 hour Drawing Machines Workshop
 3.5 hour Drawing Machines Workshop SIGGRAPH 2013 Educator s Focus Sponsored by the SIGGRAPH Education Committee Overview: The workshop is composed of three handson activities, each one introduced with
3.5 hour Drawing Machines Workshop SIGGRAPH 2013 Educator s Focus Sponsored by the SIGGRAPH Education Committee Overview: The workshop is composed of three handson activities, each one introduced with
Experiment (2) DC Motor Control (Direction and Speed)
 DC Motor Control (Direction and Speed)") Introduction Experiment (2) DC Motor Control (Direction and Speed) Controlling direction and speed of DC motor is very essential in many applications like: 1- Robotic application to change direction and
Introduction Experiment (2) DC Motor Control (Direction and Speed) Controlling direction and speed of DC motor is very essential in many applications like: 1- Robotic application to change direction and
ES86 Series Closed-loop Stepper Drive + Motor System (ES-D808 Drive+ Motor/Encoder)
") ES86 Series Closed-loop Stepper Drive + Motor System (ES-D808 Drive+ Motor/Encoder) Traditional stepper motor drive systems operate open loop providing position control without feedback. However, because
ES86 Series Closed-loop Stepper Drive + Motor System (ES-D808 Drive+ Motor/Encoder) Traditional stepper motor drive systems operate open loop providing position control without feedback. However, because
Interface H-bridge to Microcontroller, Battery Power and Gearbox to H-bridge Last Updated September 28, Background
 1 ME313 Project Assignment #2 Interface H-bridge to Microcontroller, Battery Power and Gearbox to H-bridge Last Updated September 28, 2015. Background The objective of the ME313 project is to fabricate
1 ME313 Project Assignment #2 Interface H-bridge to Microcontroller, Battery Power and Gearbox to H-bridge Last Updated September 28, 2015. Background The objective of the ME313 project is to fabricate
The line driver option offers enhanced performance when the encoder is used in noisy environments, or when it is required to drive long distances.
 Large Diameter (56 mm), Housed Two and Three Channel Optical Encoders Technical Data HEDL-65xx HEDM-65xx HEDS-65xx Series Features: Two Channel Quadrature Output with Optional Index Pulse TTL Compatible
Large Diameter (56 mm), Housed Two and Three Channel Optical Encoders Technical Data HEDL-65xx HEDM-65xx HEDS-65xx Series Features: Two Channel Quadrature Output with Optional Index Pulse TTL Compatible
Computer Numeric Control
 Computer Numeric Control TA202A 2017-18(2 nd ) Semester Prof. J. Ramkumar Department of Mechanical Engineering IIT Kanpur Computer Numeric Control A system in which actions are controlled by the direct
Computer Numeric Control TA202A 2017-18(2 nd ) Semester Prof. J. Ramkumar Department of Mechanical Engineering IIT Kanpur Computer Numeric Control A system in which actions are controlled by the direct
LSM&DSD Brushless Servo Drive Package
 LSM&DSD Brushless Servo Drive Package Descriptions LSM&DSD brushless servo drive package consists of one of LSM60 brushless servo motors and DSD806 brushless servo drive, offering high performance with
LSM&DSD Brushless Servo Drive Package Descriptions LSM&DSD brushless servo drive package consists of one of LSM60 brushless servo motors and DSD806 brushless servo drive, offering high performance with
ME375 Lab Project. Bradley Boane & Jeremy Bourque April 25, 2018
 ME375 Lab Project Bradley Boane & Jeremy Bourque April 25, 2018 Introduction: The goal of this project was to build and program a two-wheel robot that travels forward in a straight line for a distance
ME375 Lab Project Bradley Boane & Jeremy Bourque April 25, 2018 Introduction: The goal of this project was to build and program a two-wheel robot that travels forward in a straight line for a distance
Agilent AEDS-962x for 150 LPI Ultra Small Optical Encoder Modules
 Agilent AEDS-962x for 150 LPI Ultra Small Optical Encoder Modules Data Sheet Description This is a very small, low package height and high performance incremental encoder module. When operated in conjunction
Agilent AEDS-962x for 150 LPI Ultra Small Optical Encoder Modules Data Sheet Description This is a very small, low package height and high performance incremental encoder module. When operated in conjunction
5. Transducers Definition and General Concept of Transducer Classification of Transducers
 5.1. Definition and General Concept of Definition The transducer is a device which converts one form of energy into another form. Examples: Mechanical transducer and Electrical transducer Electrical A
5.1. Definition and General Concept of Definition The transducer is a device which converts one form of energy into another form. Examples: Mechanical transducer and Electrical transducer Electrical A
Data Sheet. AEDT-9140 Series High Temperature 115 C Three Channel Optical Incremental Encoder Modules 100 CPR to 1000 CPR. Description.
 AEDT-9140 Series High Temperature 115 C Three Channel Optical Incremental Encoder Modules 100 CPR to 1000 CPR Data Sheet Description The AEDT-9140 series are three channel optical incremental encoder modules.
AEDT-9140 Series High Temperature 115 C Three Channel Optical Incremental Encoder Modules 100 CPR to 1000 CPR Data Sheet Description The AEDT-9140 series are three channel optical incremental encoder modules.
Citrus Circuits Fall Workshop Series. Roborio and Sensors. Paul Ngo and Ellie Hass
 Citrus Circuits Fall Workshop Series Roborio and Sensors Paul Ngo and Ellie Hass Introduction to Sensors Sensor: a device that detects or measures a physical property and records, indicates, or otherwise
Citrus Circuits Fall Workshop Series Roborio and Sensors Paul Ngo and Ellie Hass Introduction to Sensors Sensor: a device that detects or measures a physical property and records, indicates, or otherwise
ACTUATORS AND SENSORS. Joint actuating system. Servomotors. Sensors
 ACTUATORS AND SENSORS Joint actuating system Servomotors Sensors JOINT ACTUATING SYSTEM Transmissions Joint motion low speeds high torques Spur gears change axis of rotation and/or translate application
ACTUATORS AND SENSORS Joint actuating system Servomotors Sensors JOINT ACTUATING SYSTEM Transmissions Joint motion low speeds high torques Spur gears change axis of rotation and/or translate application
Actuators, sensors and control architecture
 Actuators, sensors and control architecture a robot is composed of three fundamental parts actuators besides motors and transmissions, they constitute the locomotion apparatus (wheels, crawlers, mechanical
Actuators, sensors and control architecture a robot is composed of three fundamental parts actuators besides motors and transmissions, they constitute the locomotion apparatus (wheels, crawlers, mechanical
Stepper Motors and Control Part I - Unipolar Stepper Motor and Control (c) 1999 by Rustle Laidman, All Rights Reserved
 1999 by Rustle Laidman, All Rights Reserved") Copyright Notice: (C) June 2000-2008 by Russell Laidman. All Rights Reserved. ------------------------------------------------------------------------------------ The material contained in this project,
Copyright Notice: (C) June 2000-2008 by Russell Laidman. All Rights Reserved. ------------------------------------------------------------------------------------ The material contained in this project,
ILR #1: Sensors and Motor Control Lab. Zihao (Theo) Zhang- Team A October 14, 2016 Teammates: Amit Agarwal, Harry Golash, Yihao Qian, Menghan Zhang
 Zhang- Team A October 14, 2016 Teammates: Amit Agarwal, Harry Golash, Yihao Qian, Menghan Zhang") ILR #1: Sensors and Motor Control Lab Zihao (Theo) Zhang- Team A October 14, 2016 Teammates: Amit Agarwal, Harry Golash, Yihao Qian, Menghan Zhang Individual Progress For my team s sensors and motor control
ILR #1: Sensors and Motor Control Lab Zihao (Theo) Zhang- Team A October 14, 2016 Teammates: Amit Agarwal, Harry Golash, Yihao Qian, Menghan Zhang Individual Progress For my team s sensors and motor control
Exam 2 Topics. Statistics Uncertainty Strain gages Load cells PVA sensors DC motors AC motors Stepper motors Electrical control components
 Exam 2 Topics Statistics Uncertainty Strain gages Load cells PVA sensors DC motors AC motors Stepper motors Electrical control components Statistics Mean and standard deviation calculations µ = N N x (
Exam 2 Topics Statistics Uncertainty Strain gages Load cells PVA sensors DC motors AC motors Stepper motors Electrical control components Statistics Mean and standard deviation calculations µ = N N x (
Sensors and Motor Control Lab Individual lab report #1 October 16, 2015
 Sensors and Motor Control Lab Individual lab report #1 October 16, 2015 RICHA VARMA Team I Dorothy Kirlew Pranav Maheshwari Shivam Gautam Mohak Bharadwaj 1. Individual Progress The tasks undertaken by
Sensors and Motor Control Lab Individual lab report #1 October 16, 2015 RICHA VARMA Team I Dorothy Kirlew Pranav Maheshwari Shivam Gautam Mohak Bharadwaj 1. Individual Progress The tasks undertaken by
HEDS-9730, HEDS-9731 Small Optical Encoder Modules 480lpi Digital Output. Features. Applications VCC 3 CHANNEL A 2 CHANNEL B 4 GND 1
 HEDS-9730, HEDS-9731 Small Optical Encoder Modules 480lpi Digital Output Data Sheet Description The HEDS-973X is a high performance incremental encoder module. When operated in conjunction with either
HEDS-9730, HEDS-9731 Small Optical Encoder Modules 480lpi Digital Output Data Sheet Description The HEDS-973X is a high performance incremental encoder module. When operated in conjunction with either
LINE MAZE SOLVING ROBOT
 LINE MAZE SOLVING ROBOT EEE 456 REPORT OF INTRODUCTION TO ROBOTICS PORJECT PROJECT OWNER: HAKAN UÇAROĞLU 2000502055 INSTRUCTOR: AHMET ÖZKURT 1 CONTENTS I- Abstract II- Sensor Circuit III- Compare Circuit
LINE MAZE SOLVING ROBOT EEE 456 REPORT OF INTRODUCTION TO ROBOTICS PORJECT PROJECT OWNER: HAKAN UÇAROĞLU 2000502055 INSTRUCTOR: AHMET ÖZKURT 1 CONTENTS I- Abstract II- Sensor Circuit III- Compare Circuit
Figure 1: Motor model
 EE 155/255 Lab #4 Revision 1, October 24, 2017 Lab 4: Motor Control In this lab you will characterize a DC motor and implement the speed controller from homework 3 with real hardware and demonstrate that
EE 155/255 Lab #4 Revision 1, October 24, 2017 Lab 4: Motor Control In this lab you will characterize a DC motor and implement the speed controller from homework 3 with real hardware and demonstrate that
Introduction. Theory of Operation
 Mohan Rokkam Page 1 12/15/2004 Introduction The goal of our project is to design and build an automated shopping cart that follows a shopper around. Ultrasonic waves are used due to the slower speed of
Mohan Rokkam Page 1 12/15/2004 Introduction The goal of our project is to design and build an automated shopping cart that follows a shopper around. Ultrasonic waves are used due to the slower speed of
SGM42507 DC Motor/Coil Driver
 ADVANCED DATASHEET SGM4507 GENERAL DESCRIPTION SGM4507 is a bridge-tie driver designed for actuating motors and coils bi-directionally. It translates logic level input waves to power driving outputs to
ADVANCED DATASHEET SGM4507 GENERAL DESCRIPTION SGM4507 is a bridge-tie driver designed for actuating motors and coils bi-directionally. It translates logic level input waves to power driving outputs to
Programming PIC Microchips
 Programming PIC Microchips Fís Foghlaim Forbairt Programming the PIC microcontroller using Genie Programming Editor Workshop provided & facilitated by the PDST www.t4.ie Page 1 DC motor control: DC motors
Programming PIC Microchips Fís Foghlaim Forbairt Programming the PIC microcontroller using Genie Programming Editor Workshop provided & facilitated by the PDST www.t4.ie Page 1 DC motor control: DC motors
9/28/2010. Chapter , The McGraw-Hill Companies, Inc.
 Chapter 4 Sensors are are used to detect, and often to measure, the magnitude of something. They basically operate by converting mechanical, magnetic, thermal, optical, and chemical variations into electric
Chapter 4 Sensors are are used to detect, and often to measure, the magnitude of something. They basically operate by converting mechanical, magnetic, thermal, optical, and chemical variations into electric
Material: Weight: Bearing Life: Shaft Speed: Starting Torque: Mass Moment of Inertia: Shaft Loads:
 Shaft Encoder - Ø 50 mm Shaft: Ø 6 mm to Ø 12 mm Resolution up to 12.500 ppr IP 65 (IP 67 option) Formerly named 2R or 2R-3L Automation / Electrical Specifications Code: Resolution: Supply Voltage: Voltage:
Shaft Encoder - Ø 50 mm Shaft: Ø 6 mm to Ø 12 mm Resolution up to 12.500 ppr IP 65 (IP 67 option) Formerly named 2R or 2R-3L Automation / Electrical Specifications Code: Resolution: Supply Voltage: Voltage:
Data Sheet. AEDT-9340 Series High Temperature 115 C 1250/2500 CPR 6-Channel Commutation Encoder. Description. Features.
 AEDT-9340 Series High Temperature 115 C 1250/2500 CPR 6-Channel Commutation Encoder Data Sheet Description The AEDT-9340 optical encoder series are high temperature six channel optical incremental encoder
AEDT-9340 Series High Temperature 115 C 1250/2500 CPR 6-Channel Commutation Encoder Data Sheet Description The AEDT-9340 optical encoder series are high temperature six channel optical incremental encoder