Today I t n d ro ucti tion to computer vision Course overview Course requirements
|
|
|
- Jack Elliott
- 6 years ago
- Views:
Transcription













1 COMP 776: Computer Vision
2 Today Introduction ti to computer vision i Course overview Course requirements
3 The goal of computer vision To extract t meaning from pixels What we see What a computer sees Source: S. Narasimhan
4 The goal of computer vision To extract t meaning from pixels Humans are remarkably good at this Source: 80 million tiny images by Torralba et al.
5 What kind of information can be extracted from an image? Metric 3D information Semantic information


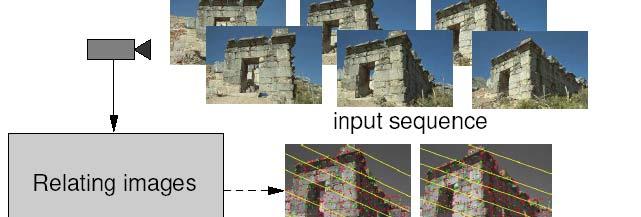

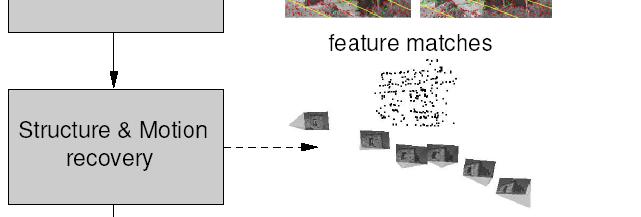
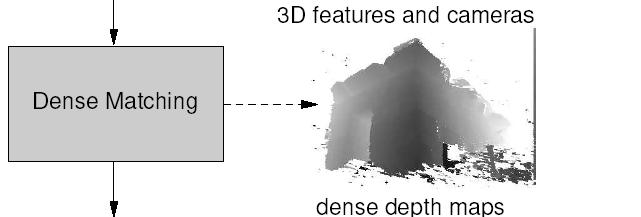


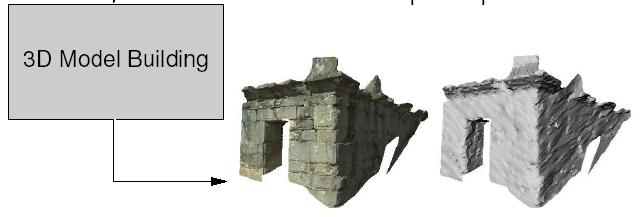

6 Vision as measurement device Real-time stereo Structure from motion Reconstruction from Internet photo collections NASA Mars Rover Pollefeys et al. Goesele et al.
7 Vision as a source of semantic information slide credit: Fei-Fei, Fergus & Torralba
8 Object categorization sky building flag banner bus face street lamp bus wall cars slide credit: Fei-Fei, Fergus & Torralba
9 Scene and context categorization outdoor city traffic slide credit: Fei-Fei, Fergus & Torralba
10 Qualitative spatial information slanted non-rigid moving object vertical rigid moving object horizontal rigid moving object slide credit: Fei-Fei, Fergus & Torralba

















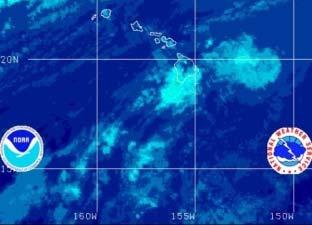

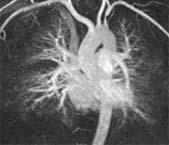



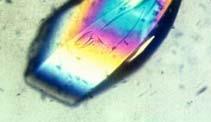





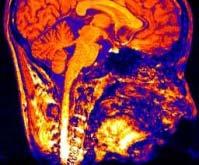


11 Why study computer vision? Vision is useful: Images and video are everywhere! Personal photo albums Movies, news, sports Surveillance and security Medical and scientific images
12 Why study computer vision? Vision is useful Vision is interesting Vision is difficult Half of primate cerebral cortex is devoted to visual processing Achieving human-level visual perception is probably AI-complete
13 Why is computer vision difficult?
14 Challenges: viewpoint variation Michelangelo slide credit: Fei-Fei, Fergus & Torralba
15 Challenges: illumination image credit: J. Koenderink








16 Challenges: scale slide credit: Fei-Fei, Fergus & Torralba
17 Challenges: deformation Xu, Beihong 1943 slide credit: Fei-Fei, Fergus & Torralba







18 Challenges: occlusion Magritte, 1957 slide credit: Fei-Fei, Fergus & Torralba
19 Challenges: background clutter
20 Challenges: Motion








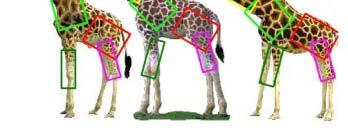
21 Challenges: object intra-class variation slide credit: Fei-Fei, Fergus & Torralba
22 Challenges: local ambiguity slide credit: Fei-Fei, Fergus & Torralba


23 Challenges: local ambiguity Source: Rob Fergus and Antonio Torralba


24 Challenges: local ambiguity Source: Rob Fergus and Antonio Torralba
25 Challenges or opportunities? Images are confusing, but they also reveal the structure t of the world through numerous cues Our job is to interpret the cues! Image source: J. Koenderink
26 Depth cues: Linear perspective
27 Depth cues: Aerial perspective
28 Depth ordering cues: Occlusion Source: J. Koenderink
29 Shape cues: Texture gradient


30 Shape and lighting cues: Shading Source: J. Koenderink
31 Position and lighting cues: Cast shadows Source: J. Koenderink
32 Grouping cues: Similarity (color, texture, proximity)
33 Grouping cues: Common fate Image credit: Arthus-Bertrand (via F. Durand)
34 Inherent ambiguity of the problem M diff t 3D ld h i i t Many different 3D scenes could have given rise to a particular 2D picture




35 Inherent ambiguity of the problem Many different 3D scenes could have given rise to a particular 2D picture Possible solutions Bring in more constraints (more images) Use prior knowledge about the structure of the world Need a combination of geometric and statistical methods
36 Connections to other disciplines Artificial Intelligence Robotics Machine Learning Computer Vision Computer Graphics Cognitive science Neuroscience Image Processing





37 Origins of computer vision L. G. Roberts, Machine Perception of Three Dimensional Solids, Ph.D. thesis, MIT Department of Electrical Engineering, 1963.
38 Successes of computer vision to date
")





39 Optical character recognition (OCR) Digit recognition yann.lecun.com License plate readers Sudoku grabber Automatic check processing Source: S. Seitz, N. Snavely






40 Biometrics Fingerprint scanners on many new laptops, other devices Face recognition systems now beginning to appear more widely i i / Source: S. Seitz

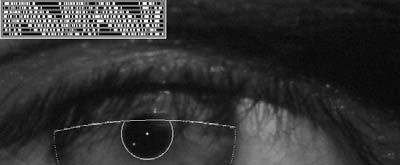


41 Biometrics How the Afghan Girl was Identified by Her Iris Patterns Source: S. Seitz
42 Mobile visual search: Google Goggles


43 Face detection Many new digital cameras now detect faces Canon, Sony, Fuji, Source: S. Seitz
44 Smile detection Sony Cyber-shot T70 Digital Still Camera Source: S. Seitz
45 Face recognition: Apple iphoto software
46 Automotive safety Mobileye: Vision systems in high-end BMW, GM, Volvo models Pedestrian collision warning Forward collision warning Lane departure warning Headway monitoring and warning Source: A. Shashua, S. Seitz




47 Vision-based interaction: Xbox Kinect kinect-works-an-amazing-use-of-infrared-light/ HowYouBecometheController








48 Special effects: shape and motion capture Source: S. Seitz





49 3D visualization: Microsoft Photosynth Source: S. Seitz
50 Vision for robotics, space exploration NASA'S Mars Exploration Rover Spirit captured this westward view from atop a low plateau where Spirit spent the closing months of Vision systems (JPL) used for several tasks Panorama stitching 3D terrain modeling Obstacle detection, position tracking For more, read Computer Vision on Mars by Matthies et al. Source: S. Seitz
51 The computer vision industry Ali list of companies here: p


: Forsyth & Ponce, Computer")

52 Basic Info Instructor: Svetlana Lazebnik edu) Office hours: By appointment, FB 244 Class webpage: Textbooks (suggested): Forsyth & Ponce, Computer Vision: i A Modern Approach Richard Szeliski, Computer Vision: Algorithms and Applications (available online)
53 Course requirements Philosophy: computer vision is best experienced hands-on Programming assignments: 50% About four assignments Expect the first one in the next couple of classes Brush up on your MATLAB skills (see web page for tutorial) Final assignment: 30% Recognition competition Winner gets a prize! Participation: 20% Come to class regularly Ask questions Answer questions
54 Collaboration policy Feel free to discuss assignments with each other, but coding must be done individually Feel free to incorporate code or tips you find on the Web, provided this doesn t make the assignment trivial and you explicitly acknowledge your sources Remember: I can Google too (and I have the copies of g ( p everybody s assignments from the last three years this class was offered)
55 Course overview I. Early vision: i Image formation and processing II. Mid-level vision: Grouping and fitting III. Multi-view geometry IV. Recognition V. Advanced topics





56 I. Early vision Basic image formation and processing * = Cameras and sensors Light and color Linear filtering Edge detection Feature extraction: corner and blob detection





57 Fitting and grouping II. Mid-level vision Alignment Fitting: Least squares Hough transform RANSAC



")


58 III. Multi-view geometry Stereo Epipolar geometry Tomasi & Kanade (1993) Affine structure from motion Projective structure from motion





59 IV. Recognition Patch description and matching Clustering and visual vocabularies Bag-of-features features models Classification Sources: D. Lowe, L. Fei-Fei




60 V. Advanced Topics Time permitting Segmentation Face detection Articulated models Motion and tracking
COMP 776: Computer Vision
 COMP 776: Computer Vision Basic Info Instructor: Svetlana Lazebnik (lazebnik@cs.unc.edu) Office hours: By appointment, FB 244 Textbook (recommended): Forsyth & Ponce, Computer Vision: A Modern Approach
COMP 776: Computer Vision Basic Info Instructor: Svetlana Lazebnik (lazebnik@cs.unc.edu) Office hours: By appointment, FB 244 Textbook (recommended): Forsyth & Ponce, Computer Vision: A Modern Approach
Introduction. Visual data acquisition devices. The goal of computer vision. The goal of computer vision. Vision as measurement device
 Spring 15 CIS 5543 Computer Vision Visual data acquisition devices Introduction Haibin Ling http://www.dabi.temple.edu/~hbling/teaching/15s_5543/index.html Revised from S. Lazebnik The goal of computer
Spring 15 CIS 5543 Computer Vision Visual data acquisition devices Introduction Haibin Ling http://www.dabi.temple.edu/~hbling/teaching/15s_5543/index.html Revised from S. Lazebnik The goal of computer
Introduction. BIL719 Computer Vision Pinar Duygulu Hacettepe University
 Introduction BIL719 Computer Vision Pinar Duygulu Hacettepe University Basic Info Textbooks (suggested): Forsyth & Ponce, Computer Vision: A Modern Approach Richard Szeliski, Computer Vision: Algorithms
Introduction BIL719 Computer Vision Pinar Duygulu Hacettepe University Basic Info Textbooks (suggested): Forsyth & Ponce, Computer Vision: A Modern Approach Richard Szeliski, Computer Vision: Algorithms
CSE 408 Multimedia Information System
 CSE 408 Multimedia Information System Intro to Images & Vision Yezhou Yang Lots of slides from Tamara Berg and L. Feifei Intro to Computer Vision Source: L. Lazebnik The goal of computer vision To perceive
CSE 408 Multimedia Information System Intro to Images & Vision Yezhou Yang Lots of slides from Tamara Berg and L. Feifei Intro to Computer Vision Source: L. Lazebnik The goal of computer vision To perceive
Lecture 1 Introduction to Computer Vision. Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2014
 Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2014 Course Info Contact Information Room 314, Jishi Building Email: cslinzhang@tongji.edu.cn
Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2014 Course Info Contact Information Room 314, Jishi Building Email: cslinzhang@tongji.edu.cn
Spring 2018 CS543 / ECE549 Computer Vision. Course webpage URL:
 Spring 2018 CS543 / ECE549 Computer Vision Course webpage URL: http://slazebni.cs.illinois.edu/spring18/ The goal of computer vision To extract meaning from pixels What we see What a computer sees Source:
Spring 2018 CS543 / ECE549 Computer Vision Course webpage URL: http://slazebni.cs.illinois.edu/spring18/ The goal of computer vision To extract meaning from pixels What we see What a computer sees Source:
Lecture 1 Introduction to Computer Vision. Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2015
 Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2015 Course Info Contact Information Room 314, Jishi Building Email: cslinzhang@tongji.edu.cn
Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2015 Course Info Contact Information Room 314, Jishi Building Email: cslinzhang@tongji.edu.cn
Lecture 1 Introduction to Computer Vision. Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2018
 Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2018 Course Info Contact Information Room 408L, Jishi Building Email: cslinzhang@tongji.edu.cn
Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2018 Course Info Contact Information Room 408L, Jishi Building Email: cslinzhang@tongji.edu.cn
CENG 595 Selected Topics in Computer Engineering Computer Vision. Zafer ARICAN, PhD
 CENG 595 Selected Topics in Computer Engineering Computer Vision Zafer ARICAN, PhD Today Administrivia What is Computer Vision? Why is it a difficult problem? State-of-the art Brief course syllabus Instructor
CENG 595 Selected Topics in Computer Engineering Computer Vision Zafer ARICAN, PhD Today Administrivia What is Computer Vision? Why is it a difficult problem? State-of-the art Brief course syllabus Instructor
Introduction to Computer Vision
 Introduction to Computer Vision by James Hays Image by kirkh.deviantart.com Categories of the SUN database What is Computer Vision? Computer Vision and Nearby Fields Computer Graphics: Models to Images
Introduction to Computer Vision by James Hays Image by kirkh.deviantart.com Categories of the SUN database What is Computer Vision? Computer Vision and Nearby Fields Computer Graphics: Models to Images
CSE 455: Computer Vision
 CSE 455: Computer Vision Instructors TAs Neel Joshi neel@cs Ira Kemelmacher kemelmi@cs Ian Simon iansimon@cs Rahul Garg rahul@cs Jiun-Hung Chen jhchen@cs Web Page http://www.cs.washington.edu/455 Time:
CSE 455: Computer Vision Instructors TAs Neel Joshi neel@cs Ira Kemelmacher kemelmi@cs Ian Simon iansimon@cs Rahul Garg rahul@cs Jiun-Hung Chen jhchen@cs Web Page http://www.cs.washington.edu/455 Time:
CS6550 Computer Vision
 CS6550 Computer Vision Class Meeting: M7M8 (3:30pm 5:20pm), R6 (2:20pm 3:10pm). Rm 106 Delta Bldg., 台達館 106 室 Instructor: Prof. Shang-Hong Lai, Rm. 636 Delta Bldg., 賴尚宏, 台達館 636 室, Tel: ext. 42958, Email:
CS6550 Computer Vision Class Meeting: M7M8 (3:30pm 5:20pm), R6 (2:20pm 3:10pm). Rm 106 Delta Bldg., 台達館 106 室 Instructor: Prof. Shang-Hong Lai, Rm. 636 Delta Bldg., 賴尚宏, 台達館 636 室, Tel: ext. 42958, Email:
CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu
 Ifeoma Nwogu") CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Today Logistics Schedule Introductions What is computer vision? Why is vision so hard? Prerequisites This course
CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Today Logistics Schedule Introductions What is computer vision? Why is vision so hard? Prerequisites This course
Computer Vision Lecture 1
 Computer Vision Lecture 1 Introduction 19.10.2016 Bastian Leibe Visual Computing Institute RWTH Aachen University http://www.vision.rwth-aachen.de/ leibe@vision.rwth-aachen.de Organization Lecturer Prof.
Computer Vision Lecture 1 Introduction 19.10.2016 Bastian Leibe Visual Computing Institute RWTH Aachen University http://www.vision.rwth-aachen.de/ leibe@vision.rwth-aachen.de Organization Lecturer Prof.
 COMP 9517 Computer Vision Introduc
COMP 9517 Computer Vision Introduc CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 1 - Introduction Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab e-mail:
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 1 - Introduction Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab e-mail:
Image Analysis & Searching
 Image Analysis & Searching 1 Searching Photos Look for photos like this one: Look for beach photos Look for photos taken Sept. 15, 2000 Look for photos with: Look for photos with Aunt Thelma 2 Annotating
Image Analysis & Searching 1 Searching Photos Look for photos like this one: Look for beach photos Look for photos taken Sept. 15, 2000 Look for photos with: Look for photos with Aunt Thelma 2 Annotating
Recognition problems. Object Recognition. Readings. What is recognition?
 Recognition problems Object Recognition Computer Vision CSE576, Spring 2008 Richard Szeliski What is it? Object and scene recognition Who is it? Identity recognition Where is it? Object detection What
Recognition problems Object Recognition Computer Vision CSE576, Spring 2008 Richard Szeliski What is it? Object and scene recognition Who is it? Identity recognition Where is it? Object detection What
Lecture 19: Depth Cameras. Kayvon Fatahalian CMU : Graphics and Imaging Architectures (Fall 2011)
") Lecture 19: Depth Cameras Kayvon Fatahalian CMU 15-869: Graphics and Imaging Architectures (Fall 2011) Continuing theme: computational photography Cheap cameras capture light, extensive processing produces
Lecture 19: Depth Cameras Kayvon Fatahalian CMU 15-869: Graphics and Imaging Architectures (Fall 2011) Continuing theme: computational photography Cheap cameras capture light, extensive processing produces
CS 131 Lecture 1: Course introduction
 CS 131 Lecture 1: Course introduction Olivier Moindrot Department of Computer Science Stanford University Stanford, CA 94305 olivierm@stanford.edu 1 What is computer vision? 1.1 Definition Two definitions
CS 131 Lecture 1: Course introduction Olivier Moindrot Department of Computer Science Stanford University Stanford, CA 94305 olivierm@stanford.edu 1 What is computer vision? 1.1 Definition Two definitions
Computer Vision. Thursday, August 30
 Computer Vision Thursday, August 30 1 Today Course overview Requirements, logistics Image formation 2 Introductions Instructor: Prof. Kristen Grauman grauman @ cs TAY 4.118, Thurs 2-4 pm TA: Sudheendra
Computer Vision Thursday, August 30 1 Today Course overview Requirements, logistics Image formation 2 Introductions Instructor: Prof. Kristen Grauman grauman @ cs TAY 4.118, Thurs 2-4 pm TA: Sudheendra
OBJECTIVE OF THE BOOK ORGANIZATION OF THE BOOK
 xv Preface Advancement in technology leads to wide spread use of mounting cameras to capture video imagery. Such surveillance cameras are predominant in commercial institutions through recording the cameras
xv Preface Advancement in technology leads to wide spread use of mounting cameras to capture video imagery. Such surveillance cameras are predominant in commercial institutions through recording the cameras
DIGITAL IMAGE PROCESSING
 DIGITAL IMAGE PROCESSING Lecture 1 Introduction Tammy Riklin Raviv Electrical and Computer Engineering Ben-Gurion University of the Negev 2 Introduction to Digital Image Processing Lecturer: Dr. Tammy
DIGITAL IMAGE PROCESSING Lecture 1 Introduction Tammy Riklin Raviv Electrical and Computer Engineering Ben-Gurion University of the Negev 2 Introduction to Digital Image Processing Lecturer: Dr. Tammy
Computer Vision for HCI. Introduction. Machines That See? Science fiction. HAL, Terminator, Star Wars, I-Robot, etc.
 Computer Vision for HCI Introduction Machines That See? Science fiction HAL, Terminator, Star Wars, I-Robot, etc. 1 Machines That See? [ movie ] Definition of Computer Vision Goal of computer vision is
Computer Vision for HCI Introduction Machines That See? Science fiction HAL, Terminator, Star Wars, I-Robot, etc. 1 Machines That See? [ movie ] Definition of Computer Vision Goal of computer vision is
High Level Computer Vision. Introduction - April 16, Bernt Schiele & Mario Fritz MPI Informatics and Saarland University, Saarbrücken, Germany
 Perceptual and Sensory Augmented Computing High Level Computer Vision Introduction - April 16, 2014 MPI Informatics and Saarland University, Saarbrücken, Germany http://www.d2.mpi-inf.mpg.de/cv Computer
Perceptual and Sensory Augmented Computing High Level Computer Vision Introduction - April 16, 2014 MPI Informatics and Saarland University, Saarbrücken, Germany http://www.d2.mpi-inf.mpg.de/cv Computer
Chapter 12 Image Processing
 Chapter 12 Image Processing The distance sensor on your self-driving car detects an object 100 m in front of your car. Are you following the car in front of you at a safe distance or has a pedestrian jumped
Chapter 12 Image Processing The distance sensor on your self-driving car detects an object 100 m in front of your car. Are you following the car in front of you at a safe distance or has a pedestrian jumped
Digital image processing vs. computer vision Higher-level anchoring
 Digital image processing vs. computer vision Higher-level anchoring Václav Hlaváč Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception
Digital image processing vs. computer vision Higher-level anchoring Václav Hlaváč Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception
Today. CS 395T Visual Recognition. Course content. Administration. Expectations. Paper reviews
 Today CS 395T Visual Recognition Course logistics Overview Volunteers, prep for next week Thursday, January 18 Administration Class: Tues / Thurs 12:30-2 PM Instructor: Kristen Grauman grauman at cs.utexas.edu
Today CS 395T Visual Recognition Course logistics Overview Volunteers, prep for next week Thursday, January 18 Administration Class: Tues / Thurs 12:30-2 PM Instructor: Kristen Grauman grauman at cs.utexas.edu
Computer vision, wearable computing and the future of transportation
 Computer vision, wearable computing and the future of transportation Amnon Shashua Hebrew University, Mobileye, OrCam 1 Computer Vision that will Change Transportation Amnon Shashua Mobileye 2 Computer
Computer vision, wearable computing and the future of transportation Amnon Shashua Hebrew University, Mobileye, OrCam 1 Computer Vision that will Change Transportation Amnon Shashua Mobileye 2 Computer
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 22: Computational photography photomatix.com Announcements Final project midterm reports due on Tuesday to CMS by 11:59pm BRDF s can be incredibly complicated
CS6670: Computer Vision Noah Snavely Lecture 22: Computational photography photomatix.com Announcements Final project midterm reports due on Tuesday to CMS by 11:59pm BRDF s can be incredibly complicated
Video Registration: Key Challenges. Richard Szeliski Microsoft Research
 Video Registration: Key Challenges Richard Szeliski Microsoft Research 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. Key Challenges 1. Mosaics and panoramas 2. Object-based based segmentation (MPEG-4) 3. Engineering
Video Registration: Key Challenges Richard Szeliski Microsoft Research 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. Key Challenges 1. Mosaics and panoramas 2. Object-based based segmentation (MPEG-4) 3. Engineering
Book Cover Recognition Project
 Book Cover Recognition Project Carolina Galleguillos Department of Computer Science University of California San Diego La Jolla, CA 92093-0404 cgallegu@cs.ucsd.edu Abstract The purpose of this project
Book Cover Recognition Project Carolina Galleguillos Department of Computer Science University of California San Diego La Jolla, CA 92093-0404 cgallegu@cs.ucsd.edu Abstract The purpose of this project
Introduction. Ioannis Rekleitis
 Introduction Ioannis Rekleitis Why Image Processing? Who here has a camera? How many cameras do you have Point where computers fast/cheap Cameras become omnipresent Deep Learning CSCE 590: Introduction
Introduction Ioannis Rekleitis Why Image Processing? Who here has a camera? How many cameras do you have Point where computers fast/cheap Cameras become omnipresent Deep Learning CSCE 590: Introduction
CS 534: Computer Vision
 CS 534: Computer Vision Spring 2005 Ahmed Elgammal Dept of Computer Science Computer Vision Introduction - 1 Outlines Vision What and Why? Human vision Computer vision General computer vision applications
CS 534: Computer Vision Spring 2005 Ahmed Elgammal Dept of Computer Science Computer Vision Introduction - 1 Outlines Vision What and Why? Human vision Computer vision General computer vision applications
Occlusion. Atmospheric Perspective. Height in the Field of View. Seeing Depth The Cue Approach. Monocular/Pictorial
 Seeing Depth The Cue Approach Occlusion Monocular/Pictorial Cues that are available in the 2D image Height in the Field of View Atmospheric Perspective 1 Linear Perspective Linear Perspective & Texture
Seeing Depth The Cue Approach Occlusion Monocular/Pictorial Cues that are available in the 2D image Height in the Field of View Atmospheric Perspective 1 Linear Perspective Linear Perspective & Texture
Manipulation. Manipulation. Better Vision through Manipulation. Giorgio Metta Paul Fitzpatrick. Humanoid Robotics Group.
 Manipulation Manipulation Better Vision through Manipulation Giorgio Metta Paul Fitzpatrick Humanoid Robotics Group MIT AI Lab Vision & Manipulation In robotics, vision is often used to guide manipulation
Manipulation Manipulation Better Vision through Manipulation Giorgio Metta Paul Fitzpatrick Humanoid Robotics Group MIT AI Lab Vision & Manipulation In robotics, vision is often used to guide manipulation
Practical Image and Video Processing Using MATLAB
 Practical Image and Video Processing Using MATLAB Chapter 1 Introduction and overview What will we learn? What is image processing? What are the main applications of image processing? What is an image?
Practical Image and Video Processing Using MATLAB Chapter 1 Introduction and overview What will we learn? What is image processing? What are the main applications of image processing? What is an image?
CSE 527: Introduction to Computer Vision
 CSE 527: Introduction to Computer Vision Week 7 - Class 2: Segmentation 2 October 12th, 2017 Today Segmentation, continued: - Superpixels Graph-cut methods Mid-term: - Practice questions Administrations
CSE 527: Introduction to Computer Vision Week 7 - Class 2: Segmentation 2 October 12th, 2017 Today Segmentation, continued: - Superpixels Graph-cut methods Mid-term: - Practice questions Administrations
Computer Vision Slides curtesy of Professor Gregory Dudek
 Computer Vision Slides curtesy of Professor Gregory Dudek Ioannis Rekleitis Why vision? Passive (emits nothing). Discreet. Energy efficient. Intuitive. Powerful (works well for us, right?) Long and short
Computer Vision Slides curtesy of Professor Gregory Dudek Ioannis Rekleitis Why vision? Passive (emits nothing). Discreet. Energy efficient. Intuitive. Powerful (works well for us, right?) Long and short
Image stitching. Image stitching. Video summarization. Applications of image stitching. Stitching = alignment + blending. geometrical registration
 Image stitching Stitching = alignment + blending Image stitching geometrical registration photometric registration Digital Visual Effects, Spring 2006 Yung-Yu Chuang 2005/3/22 with slides by Richard Szeliski,
Image stitching Stitching = alignment + blending Image stitching geometrical registration photometric registration Digital Visual Effects, Spring 2006 Yung-Yu Chuang 2005/3/22 with slides by Richard Szeliski,
Computer Vision Introduction or
 Computer Vision Introduction http://www.ugrad.cs.jhu.edu/~cs461 or http://cirl.lcsr.jhu.edu/vision_syllabus Professor Hager http://www.cs.jhu.edu/~hager Outline for Today Outline and Organization of the
Computer Vision Introduction http://www.ugrad.cs.jhu.edu/~cs461 or http://cirl.lcsr.jhu.edu/vision_syllabus Professor Hager http://www.cs.jhu.edu/~hager Outline for Today Outline and Organization of the
(15-862): Computational Photography
: Computational Photography") 15-463 (15-862): Computational Photography 15-463 (15-862): Computational Photography Staff Prof: Alexei Efros (efros@cs), 225 Smith Hall TA: Natasha Kholgade (nkholgad@andrew.cmu.edu) Web Page http://graphics.cs.cmu.edu/courses/15-463/
15-463 (15-862): Computational Photography 15-463 (15-862): Computational Photography Staff Prof: Alexei Efros (efros@cs), 225 Smith Hall TA: Natasha Kholgade (nkholgad@andrew.cmu.edu) Web Page http://graphics.cs.cmu.edu/courses/15-463/
CSE Tue 10/09. Nadir Weibel
 CSE 118 - Tue 10/09 Nadir Weibel Today Admin Teams Assignments, grading, submissions Mini Quiz on Week 1 (readings and class material) Low-Fidelity Prototyping 1st Project Assignment Computer Vision, Kinect,
CSE 118 - Tue 10/09 Nadir Weibel Today Admin Teams Assignments, grading, submissions Mini Quiz on Week 1 (readings and class material) Low-Fidelity Prototyping 1st Project Assignment Computer Vision, Kinect,
Light-Field Database Creation and Depth Estimation
 Light-Field Database Creation and Depth Estimation Abhilash Sunder Raj abhisr@stanford.edu Michael Lowney mlowney@stanford.edu Raj Shah shahraj@stanford.edu Abstract Light-field imaging research has been
Light-Field Database Creation and Depth Estimation Abhilash Sunder Raj abhisr@stanford.edu Michael Lowney mlowney@stanford.edu Raj Shah shahraj@stanford.edu Abstract Light-field imaging research has been
Transportation Informatics Group, ALPEN-ADRIA University of Klagenfurt. Transportation Informatics Group University of Klagenfurt 3/10/2009 1
 Machine Vision Transportation Informatics Group University of Klagenfurt Alireza Fasih, 2009 3/10/2009 1 Address: L4.2.02, Lakeside Park, Haus B04, Ebene 2, Klagenfurt-Austria Index Driver Fatigue Detection
Machine Vision Transportation Informatics Group University of Klagenfurt Alireza Fasih, 2009 3/10/2009 1 Address: L4.2.02, Lakeside Park, Haus B04, Ebene 2, Klagenfurt-Austria Index Driver Fatigue Detection
CSCE 763: Digital Image Processing
 CSCE 763: Digital Image Processing Spring 2018 Yan Tong Department of Computer Science and Engineering University of South Carolina Today s Agenda Welcome Tentative Syllabus Topics covered in the course
CSCE 763: Digital Image Processing Spring 2018 Yan Tong Department of Computer Science and Engineering University of South Carolina Today s Agenda Welcome Tentative Syllabus Topics covered in the course
CPSC 425: Computer Vision
 1 / 55 CPSC 425: Computer Vision Instructor: Fred Tung ftung@cs.ubc.ca Department of Computer Science University of British Columbia Lecture Notes 2015/2016 Term 2 2 / 55 Menu January 7, 2016 Topics: Image
1 / 55 CPSC 425: Computer Vision Instructor: Fred Tung ftung@cs.ubc.ca Department of Computer Science University of British Columbia Lecture Notes 2015/2016 Term 2 2 / 55 Menu January 7, 2016 Topics: Image
Ant? Bird? Dog? Human -SURE
 ECE 172A: Intelligent Systems: Introduction Week 1 (October 1, 2007): Course Introduction and Announcements Intelligent Robots as Intelligent Systems A systems perspective of Intelligent Robots and capabilities
ECE 172A: Intelligent Systems: Introduction Week 1 (October 1, 2007): Course Introduction and Announcements Intelligent Robots as Intelligent Systems A systems perspective of Intelligent Robots and capabilities
(15-862): Computational Photography
: Computational Photography") 15-463 (15-862): Computational Photography Staff Prof: Alexei Efros (efros@cs), 4207 NSH TA: Mohit Gupta (mohitg@cs) Web Page http://graphics.cs.cmu.edu/courses/15-463/ Newsgroup: cmu.cs.class.cs463 Today
15-463 (15-862): Computational Photography Staff Prof: Alexei Efros (efros@cs), 4207 NSH TA: Mohit Gupta (mohitg@cs) Web Page http://graphics.cs.cmu.edu/courses/15-463/ Newsgroup: cmu.cs.class.cs463 Today
Telling What-Is-What in Video. Gerard Medioni
 Telling What-Is-What in Video Gerard Medioni medioni@usc.edu 1 Tracking Essential problem Establishes correspondences between elements in successive frames Basic problem easy 2 Many issues One target (pursuit)
Telling What-Is-What in Video Gerard Medioni medioni@usc.edu 1 Tracking Essential problem Establishes correspondences between elements in successive frames Basic problem easy 2 Many issues One target (pursuit)
Background. Computer Vision & Digital Image Processing. Improved Bartlane transmitted image. Example Bartlane transmitted image
 Background Computer Vision & Digital Image Processing Introduction to Digital Image Processing Interest comes from two primary backgrounds Improvement of pictorial information for human perception How
Background Computer Vision & Digital Image Processing Introduction to Digital Image Processing Interest comes from two primary backgrounds Improvement of pictorial information for human perception How
Curriculum Vitae. Computer Vision, Image Processing, Biometrics. Computer Vision, Vision Rehabilitation, Vision Science
 Curriculum Vitae Date Prepared: 01/09/2016 (last updated: 09/12/2016) Name: Shrinivas J. Pundlik Education 07/2002 B.E. (Bachelor of Engineering) Electronics Engineering University of Pune, Pune, India
Curriculum Vitae Date Prepared: 01/09/2016 (last updated: 09/12/2016) Name: Shrinivas J. Pundlik Education 07/2002 B.E. (Bachelor of Engineering) Electronics Engineering University of Pune, Pune, India
- Basics of informatics - Computer network - Software engineering - Intelligent media processing - Human interface. Professor. Professor.
 - Basics of informatics - Computer network - Software engineering - Intelligent media processing - Human interface Computer-Aided Engineering Research of power/signal integrity analysis and EMC design
- Basics of informatics - Computer network - Software engineering - Intelligent media processing - Human interface Computer-Aided Engineering Research of power/signal integrity analysis and EMC design
Detection and Tracking of the Vanishing Point on a Horizon for Automotive Applications
 Detection and Tracking of the Vanishing Point on a Horizon for Automotive Applications Young-Woo Seo and Ragunathan (Raj) Rajkumar GM-CMU Autonomous Driving Collaborative Research Lab Carnegie Mellon University
Detection and Tracking of the Vanishing Point on a Horizon for Automotive Applications Young-Woo Seo and Ragunathan (Raj) Rajkumar GM-CMU Autonomous Driving Collaborative Research Lab Carnegie Mellon University
Image Processing Based Vehicle Detection And Tracking System
 Image Processing Based Vehicle Detection And Tracking System Poonam A. Kandalkar 1, Gajanan P. Dhok 2 ME, Scholar, Electronics and Telecommunication Engineering, Sipna College of Engineering and Technology,
Image Processing Based Vehicle Detection And Tracking System Poonam A. Kandalkar 1, Gajanan P. Dhok 2 ME, Scholar, Electronics and Telecommunication Engineering, Sipna College of Engineering and Technology,
6.869 Advances in Computer Vision Spring 2010, A. Torralba
 6.869 Advances in Computer Vision Spring 2010, A. Torralba Due date: Wednesday, Feb 17, 2010 Problem set 1 You need to submit a report with brief descriptions of what you did. The most important part is
6.869 Advances in Computer Vision Spring 2010, A. Torralba Due date: Wednesday, Feb 17, 2010 Problem set 1 You need to submit a report with brief descriptions of what you did. The most important part is
Recommended Text. Logistics. Course Logistics. Intelligent Robotic Systems
 Recommended Text Intelligent Robotic Systems CS 685 Jana Kosecka, 4444 Research II kosecka@gmu.edu, 3-1876 [1] S. LaValle: Planning Algorithms, Cambridge Press, http://planning.cs.uiuc.edu/ [2] S. Thrun,
Recommended Text Intelligent Robotic Systems CS 685 Jana Kosecka, 4444 Research II kosecka@gmu.edu, 3-1876 [1] S. LaValle: Planning Algorithms, Cambridge Press, http://planning.cs.uiuc.edu/ [2] S. Thrun,
Colour correction for panoramic imaging
 Colour correction for panoramic imaging Gui Yun Tian Duke Gledhill Dave Taylor The University of Huddersfield David Clarke Rotography Ltd Abstract: This paper reports the problem of colour distortion in
Colour correction for panoramic imaging Gui Yun Tian Duke Gledhill Dave Taylor The University of Huddersfield David Clarke Rotography Ltd Abstract: This paper reports the problem of colour distortion in
ELE 882: Introduction to Digital Image Processing (DIP)
") ELE882 Introduction to Digital Image Processing Course Instructor: Prof. Ling Guan Department of Electrical & Computer Engineering Room 315, ENG Building Tel: (416)979-5000 ext 6072 Email: lguan@ee.ryerson.ca
ELE882 Introduction to Digital Image Processing Course Instructor: Prof. Ling Guan Department of Electrical & Computer Engineering Room 315, ENG Building Tel: (416)979-5000 ext 6072 Email: lguan@ee.ryerson.ca
ROAD TO THE BEST ALPR IMAGES
 ROAD TO THE BEST ALPR IMAGES INTRODUCTION Since automatic license plate recognition (ALPR) or automatic number plate recognition (ANPR) relies on optical character recognition (OCR) of images, it makes
ROAD TO THE BEST ALPR IMAGES INTRODUCTION Since automatic license plate recognition (ALPR) or automatic number plate recognition (ANPR) relies on optical character recognition (OCR) of images, it makes
Image Filtering in Spatial domain. Computer Vision Jia-Bin Huang, Virginia Tech
 Image Filtering in Spatial domain Computer Vision Jia-Bin Huang, Virginia Tech Administrative stuffs Lecture schedule changes Office hours - Jia-Bin (44 Whittemore Hall) Friday at : AM 2: PM Office hours
Image Filtering in Spatial domain Computer Vision Jia-Bin Huang, Virginia Tech Administrative stuffs Lecture schedule changes Office hours - Jia-Bin (44 Whittemore Hall) Friday at : AM 2: PM Office hours
Intelligent Identification System Research
 2016 International Conference on Manufacturing Construction and Energy Engineering (MCEE) ISBN: 978-1-60595-374-8 Intelligent Identification System Research Zi-Min Wang and Bai-Qing He Abstract: From the
2016 International Conference on Manufacturing Construction and Energy Engineering (MCEE) ISBN: 978-1-60595-374-8 Intelligent Identification System Research Zi-Min Wang and Bai-Qing He Abstract: From the
Panoramic Vision System for an Intelligent Vehicle using. a Laser Sensor and Cameras
 Panoramic Vision System for an Intelligent Vehicle using a Laser Sensor and Cameras Min Woo Park PH.D Student, Graduate School of Electrical Engineering and Computer Science, Kyungpook National University,
Panoramic Vision System for an Intelligent Vehicle using a Laser Sensor and Cameras Min Woo Park PH.D Student, Graduate School of Electrical Engineering and Computer Science, Kyungpook National University,
Machine Vision for the Life Sciences
 Machine Vision for the Life Sciences Presented by: Niels Wartenberg June 12, 2012 Track, Trace & Control Solutions Niels Wartenberg Microscan Sr. Applications Engineer, Clinical Senior Applications Engineer
Machine Vision for the Life Sciences Presented by: Niels Wartenberg June 12, 2012 Track, Trace & Control Solutions Niels Wartenberg Microscan Sr. Applications Engineer, Clinical Senior Applications Engineer
Implementation of License Plate Recognition System in ARM Cortex A8 Board
 www..org 9 Implementation of License Plate Recognition System in ARM Cortex A8 Board S. Uma 1, M.Sharmila 2 1 Assistant Professor, 2 Research Scholar, Department of Electrical and Electronics Engg, College
www..org 9 Implementation of License Plate Recognition System in ARM Cortex A8 Board S. Uma 1, M.Sharmila 2 1 Assistant Professor, 2 Research Scholar, Department of Electrical and Electronics Engg, College
Recognition Of Vehicle Number Plate Using MATLAB
 Recognition Of Vehicle Number Plate Using MATLAB Mr. Ami Kumar Parida 1, SH Mayuri 2,Pallabi Nayk 3,Nidhi Bharti 4 1Asst. Professor, Gandhi Institute Of Engineering and Technology, Gunupur 234Under Graduate,
Recognition Of Vehicle Number Plate Using MATLAB Mr. Ami Kumar Parida 1, SH Mayuri 2,Pallabi Nayk 3,Nidhi Bharti 4 1Asst. Professor, Gandhi Institute Of Engineering and Technology, Gunupur 234Under Graduate,
A NEW NEUROMORPHIC STRATEGY FOR THE FUTURE OF VISION FOR MACHINES June Xavier Lagorce Head of Computer Vision & Systems
 A NEW NEUROMORPHIC STRATEGY FOR THE FUTURE OF VISION FOR MACHINES June 2017 Xavier Lagorce Head of Computer Vision & Systems Imagine meeting the promise of Restoring sight to the blind Accident-free autonomous
A NEW NEUROMORPHIC STRATEGY FOR THE FUTURE OF VISION FOR MACHINES June 2017 Xavier Lagorce Head of Computer Vision & Systems Imagine meeting the promise of Restoring sight to the blind Accident-free autonomous
CIS 849: Autonomous Robot Vision
 CIS 849: Autonomous Robot Vision Instructor: Christopher Rasmussen Course web page: www.cis.udel.edu/~cer/arv September 5, 2002 Purpose of this Course To provide an introduction to the uses of visual sensing
CIS 849: Autonomous Robot Vision Instructor: Christopher Rasmussen Course web page: www.cis.udel.edu/~cer/arv September 5, 2002 Purpose of this Course To provide an introduction to the uses of visual sensing
ARTIFICIAL INTELLIGENCE - ROBOTICS
 ARTIFICIAL INTELLIGENCE - ROBOTICS http://www.tutorialspoint.com/artificial_intelligence/artificial_intelligence_robotics.htm Copyright tutorialspoint.com Robotics is a domain in artificial intelligence
ARTIFICIAL INTELLIGENCE - ROBOTICS http://www.tutorialspoint.com/artificial_intelligence/artificial_intelligence_robotics.htm Copyright tutorialspoint.com Robotics is a domain in artificial intelligence
Driver Assistance for "Keeping Hands on the Wheel and Eyes on the Road"
 ICVES 2009 Driver Assistance for "Keeping Hands on the Wheel and Eyes on the Road" Cuong Tran and Mohan Manubhai Trivedi Laboratory for Intelligent and Safe Automobiles (LISA) University of California
ICVES 2009 Driver Assistance for "Keeping Hands on the Wheel and Eyes on the Road" Cuong Tran and Mohan Manubhai Trivedi Laboratory for Intelligent and Safe Automobiles (LISA) University of California
Exercise questions for Machine vision
 Exercise questions for Machine vision This is a collection of exercise questions. These questions are all examination alike which means that similar questions may appear at the written exam. I ve divided
Exercise questions for Machine vision This is a collection of exercise questions. These questions are all examination alike which means that similar questions may appear at the written exam. I ve divided
Aerial photography: Principles. Frame capture sensors: Analog film and digital cameras
 Aerial photography: Principles Frame capture sensors: Analog film and digital cameras Overview Introduction Frame vs scanning sensors Cameras (film and digital) Photogrammetry Orthophotos Air photos are
Aerial photography: Principles Frame capture sensors: Analog film and digital cameras Overview Introduction Frame vs scanning sensors Cameras (film and digital) Photogrammetry Orthophotos Air photos are
Image formation - Cameras. Grading & Project. About the course. Tentative Schedule. Course Content. Students introduction
 About the course Instructors: Haibin Ling (hbling@temple, Wachman 35) Hours Lecture: Tuesda 5:3-8:pm, TTLMAN 43B Office hour: Tuesda 3: - 5:pm, or b appointment Textbook Computer Vision: Models, Learning,
About the course Instructors: Haibin Ling (hbling@temple, Wachman 35) Hours Lecture: Tuesda 5:3-8:pm, TTLMAN 43B Office hour: Tuesda 3: - 5:pm, or b appointment Textbook Computer Vision: Models, Learning,
CS6670: Computer Vision Noah Snavely. Administrivia. Administrivia. Reading. Last time: Convolution. Last time: Cross correlation 9/8/2009
 CS667: Computer Vision Noah Snavely Administrivia New room starting Thursday: HLS B Lecture 2: Edge detection and resampling From Sandlot Science Administrivia Assignment (feature detection and matching)
CS667: Computer Vision Noah Snavely Administrivia New room starting Thursday: HLS B Lecture 2: Edge detection and resampling From Sandlot Science Administrivia Assignment (feature detection and matching)
Prof. Feng Liu. Winter /10/2019
 Prof. Feng Liu Winter 29 http://www.cs.pdx.edu/~fliu/courses/cs4/ //29 Last Time Course overview Admin. Info Computer Vision Computer Vision at PSU Image representation Color 2 Today Filter 3 Today Filters
Prof. Feng Liu Winter 29 http://www.cs.pdx.edu/~fliu/courses/cs4/ //29 Last Time Course overview Admin. Info Computer Vision Computer Vision at PSU Image representation Color 2 Today Filter 3 Today Filters
CSCI 1290: Comp Photo
 CSCI 29: Comp Photo Fall 28 @ Brown University James Tompkin Many slides thanks to James Hays old CS 29 course, along with all of its acknowledgements. Things I forgot on Thursday Grads are not required
CSCI 29: Comp Photo Fall 28 @ Brown University James Tompkin Many slides thanks to James Hays old CS 29 course, along with all of its acknowledgements. Things I forgot on Thursday Grads are not required
Computer Vision Lesson Plan
 Computer Vision Lesson Plan Overview Computer Vision Summary Computers today are being used to accomplish tasks that require using one or more of the five senses. Vision - seeing objects and identifying
Computer Vision Lesson Plan Overview Computer Vision Summary Computers today are being used to accomplish tasks that require using one or more of the five senses. Vision - seeing objects and identifying
Computational and Biological Vision
 Introduction to Computational and Biological Vision CS 202-1-5261 Computer Science Department, BGU Ohad Ben-Shahar Some necessary administrivia Lecturer : Ohad Ben-Shahar Email address : ben-shahar@cs.bgu.ac.il
Introduction to Computational and Biological Vision CS 202-1-5261 Computer Science Department, BGU Ohad Ben-Shahar Some necessary administrivia Lecturer : Ohad Ben-Shahar Email address : ben-shahar@cs.bgu.ac.il
FOCAL LENGTH CHANGE COMPENSATION FOR MONOCULAR SLAM
 FOCAL LENGTH CHANGE COMPENSATION FOR MONOCULAR SLAM Takafumi Taketomi Nara Institute of Science and Technology, Japan Janne Heikkilä University of Oulu, Finland ABSTRACT In this paper, we propose a method
FOCAL LENGTH CHANGE COMPENSATION FOR MONOCULAR SLAM Takafumi Taketomi Nara Institute of Science and Technology, Japan Janne Heikkilä University of Oulu, Finland ABSTRACT In this paper, we propose a method
(15-862): Computational Photography
: Computational Photography") 15-463 (15-862): Computational Photography 15-463 (15-862): Computational Photography Staff Prof: Alexei Efros (efros@cs), 4207 NSH TA: Santosh Kumar Divvala (santosh@cs), TBA Web Page http://graphics.cs.cmu.edu/courses/15-463/
15-463 (15-862): Computational Photography 15-463 (15-862): Computational Photography Staff Prof: Alexei Efros (efros@cs), 4207 NSH TA: Santosh Kumar Divvala (santosh@cs), TBA Web Page http://graphics.cs.cmu.edu/courses/15-463/
MAV-ID card processing using camera images
 EE 5359 MULTIMEDIA PROCESSING SPRING 2013 PROJECT PROPOSAL MAV-ID card processing using camera images Under guidance of DR K R RAO DEPARTMENT OF ELECTRICAL ENGINEERING UNIVERSITY OF TEXAS AT ARLINGTON
EE 5359 MULTIMEDIA PROCESSING SPRING 2013 PROJECT PROPOSAL MAV-ID card processing using camera images Under guidance of DR K R RAO DEPARTMENT OF ELECTRICAL ENGINEERING UNIVERSITY OF TEXAS AT ARLINGTON
Number Plate Detection with a Multi-Convolutional Neural Network Approach with Optical Character Recognition for Mobile Devices
 J Inf Process Syst, Vol.12, No.1, pp.100~108, March 2016 http://dx.doi.org/10.3745/jips.04.0022 ISSN 1976-913X (Print) ISSN 2092-805X (Electronic) Number Plate Detection with a Multi-Convolutional Neural
J Inf Process Syst, Vol.12, No.1, pp.100~108, March 2016 http://dx.doi.org/10.3745/jips.04.0022 ISSN 1976-913X (Print) ISSN 2092-805X (Electronic) Number Plate Detection with a Multi-Convolutional Neural
CymbIoT Visual Analytics
 CymbIoT Visual Analytics CymbIoT Analytics Module VISUALI AUDIOI DATA The CymbIoT Analytics Module offers a series of integral analytics packages- comprising the world s leading visual content analysis
CymbIoT Visual Analytics CymbIoT Analytics Module VISUALI AUDIOI DATA The CymbIoT Analytics Module offers a series of integral analytics packages- comprising the world s leading visual content analysis
Introduction to Computer Vision
 Introduction to Computer Vision CS / ECE 181B Thursday, April 1, 2004 Course Details HW #0 and HW #1 are available. Course web site http://www.ece.ucsb.edu/~manj/cs181b Syllabus, schedule, lecture notes,
Introduction to Computer Vision CS / ECE 181B Thursday, April 1, 2004 Course Details HW #0 and HW #1 are available. Course web site http://www.ece.ucsb.edu/~manj/cs181b Syllabus, schedule, lecture notes,
Stereo-based Hand Gesture Tracking and Recognition in Immersive Stereoscopic Displays. Habib Abi-Rached Thursday 17 February 2005.
 Stereo-based Hand Gesture Tracking and Recognition in Immersive Stereoscopic Displays Habib Abi-Rached Thursday 17 February 2005. Objective Mission: Facilitate communication: Bandwidth. Intuitiveness.
Stereo-based Hand Gesture Tracking and Recognition in Immersive Stereoscopic Displays Habib Abi-Rached Thursday 17 February 2005. Objective Mission: Facilitate communication: Bandwidth. Intuitiveness.
Insights into High-level Visual Perception
 Insights into High-level Visual Perception or Where You Look is What You Get Jeff B. Pelz Visual Perception Laboratory Carlson Center for Imaging Science Rochester Institute of Technology Students Roxanne
Insights into High-level Visual Perception or Where You Look is What You Get Jeff B. Pelz Visual Perception Laboratory Carlson Center for Imaging Science Rochester Institute of Technology Students Roxanne
MATLAB 및 Simulink 를이용한운전자지원시스템개발
 MATLAB 및 Simulink 를이용한운전자지원시스템개발 김종헌차장 Senior Application Engineer MathWorks Korea 2015 The MathWorks, Inc. 1 Example : Sensor Fusion with Monocular Vision & Radar Configuration Monocular Vision installed
MATLAB 및 Simulink 를이용한운전자지원시스템개발 김종헌차장 Senior Application Engineer MathWorks Korea 2015 The MathWorks, Inc. 1 Example : Sensor Fusion with Monocular Vision & Radar Configuration Monocular Vision installed
ASPECT RATIO. Aspect ratio is the relationship of the width of a picture or sensor in relation to the height.
 ASPECT RATIO Written by Gerry Gerling Aspect ratio is the relationship of the width of a picture or sensor in relation to the height. A picture which is twice as long as it is high would have an aspect
ASPECT RATIO Written by Gerry Gerling Aspect ratio is the relationship of the width of a picture or sensor in relation to the height. A picture which is twice as long as it is high would have an aspect
Next Classes. Spatial frequency Fourier transform and frequency domain. Reminder: Textbook. Frequency view of filtering Hybrid images Sampling
 Salvador Dali, 1976 Next Classes Spatial frequency Fourier transform and frequency domain Frequency view of filtering Hybrid images Sampling Reminder: Textbook Today s lecture covers material in 3.4 Slide:
Salvador Dali, 1976 Next Classes Spatial frequency Fourier transform and frequency domain Frequency view of filtering Hybrid images Sampling Reminder: Textbook Today s lecture covers material in 3.4 Slide:
Choosing the Optimum Mix of Sensors for Driver Assistance and Autonomous Vehicles
 Choosing the Optimum Mix of Sensors for Driver Assistance and Autonomous Vehicles Ali Osman Ors May 2, 2017 Copyright 2017 NXP Semiconductors 1 Sensing Technology Comparison Rating: H = High, M=Medium,
Choosing the Optimum Mix of Sensors for Driver Assistance and Autonomous Vehicles Ali Osman Ors May 2, 2017 Copyright 2017 NXP Semiconductors 1 Sensing Technology Comparison Rating: H = High, M=Medium,
COMP371 COMPUTER GRAPHICS SESSION 1 COURSE OVERVIEW - SYLLABUS
 COMP371 COMPUTER GRAPHICS SESSION 1 COURSE OVERVIEW - SYLLABUS Lecture Overview Introduction to the class Introduction to Computer Graphics and OpenGL Programming 2 Introductions Charalambos [Charis] Poullis
COMP371 COMPUTER GRAPHICS SESSION 1 COURSE OVERVIEW - SYLLABUS Lecture Overview Introduction to the class Introduction to Computer Graphics and OpenGL Programming 2 Introductions Charalambos [Charis] Poullis
CSE 473/573 Computer Vision and Image Processing (CVIP)
") CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 4 Image formation(part I) Schedule Last class linear algebra overview Today Image formation and camera properties
CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 4 Image formation(part I) Schedule Last class linear algebra overview Today Image formation and camera properties
06: Thinking in Frequencies. CS 5840: Computer Vision Instructor: Jonathan Ventura
 06: Thinking in Frequencies CS 5840: Computer Vision Instructor: Jonathan Ventura Decomposition of Functions Taylor series: Sum of polynomials f(x) =f(a)+f 0 (a)(x a)+ f 00 (a) 2! (x a) 2 + f 000 (a) (x
06: Thinking in Frequencies CS 5840: Computer Vision Instructor: Jonathan Ventura Decomposition of Functions Taylor series: Sum of polynomials f(x) =f(a)+f 0 (a)(x a)+ f 00 (a) 2! (x a) 2 + f 000 (a) (x
Applications of Flash and No-Flash Image Pairs in Mobile Phone Photography
 Applications of Flash and No-Flash Image Pairs in Mobile Phone Photography Xi Luo Stanford University 450 Serra Mall, Stanford, CA 94305 xluo2@stanford.edu Abstract The project explores various application
Applications of Flash and No-Flash Image Pairs in Mobile Phone Photography Xi Luo Stanford University 450 Serra Mall, Stanford, CA 94305 xluo2@stanford.edu Abstract The project explores various application
(15-862): Computational Photography
: Computational Photography") 15-463 (15-862): Computational Photography 15-463 (15-862): Computational Photography Staff Prof: Alexei Efros (efros@cs), 4207 NSH TAs: Alvaro Collet (acollet@cs) and Laura Trutoiu (trutoiu@cs) Web Page
15-463 (15-862): Computational Photography 15-463 (15-862): Computational Photography Staff Prof: Alexei Efros (efros@cs), 4207 NSH TAs: Alvaro Collet (acollet@cs) and Laura Trutoiu (trutoiu@cs) Web Page
COS Lecture 1 Autonomous Robot Navigation
 COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
Perception platform and fusion modules results. Angelos Amditis - ICCS and Lali Ghosh - DEL interactive final event
 Perception platform and fusion modules results Angelos Amditis - ICCS and Lali Ghosh - DEL interactive final event 20 th -21 st November 2013 Agenda Introduction Environment Perception in Intelligent Transport
Perception platform and fusion modules results Angelos Amditis - ICCS and Lali Ghosh - DEL interactive final event 20 th -21 st November 2013 Agenda Introduction Environment Perception in Intelligent Transport
Unit 12: Artificial Intelligence CS 101, Fall 2018
 Unit 12: Artificial Intelligence CS 101, Fall 2018 Learning Objectives After completing this unit, you should be able to: Explain the difference between procedural and declarative knowledge. Describe the
Unit 12: Artificial Intelligence CS 101, Fall 2018 Learning Objectives After completing this unit, you should be able to: Explain the difference between procedural and declarative knowledge. Describe the
APPLICATION OF COMPUTER VISION FOR DETERMINATION OF SYMMETRICAL OBJECT POSITION IN THREE DIMENSIONAL SPACE
 APPLICATION OF COMPUTER VISION FOR DETERMINATION OF SYMMETRICAL OBJECT POSITION IN THREE DIMENSIONAL SPACE Najirah Umar 1 1 Jurusan Teknik Informatika, STMIK Handayani Makassar Email : najirah_stmikh@yahoo.com
APPLICATION OF COMPUTER VISION FOR DETERMINATION OF SYMMETRICAL OBJECT POSITION IN THREE DIMENSIONAL SPACE Najirah Umar 1 1 Jurusan Teknik Informatika, STMIK Handayani Makassar Email : najirah_stmikh@yahoo.com
Virtual Worlds for the Perception and Control of Self-Driving Vehicles
 Virtual Worlds for the Perception and Control of Self-Driving Vehicles Dr. Antonio M. López antonio@cvc.uab.es Index Context SYNTHIA: CVPR 16 SYNTHIA: Reloaded SYNTHIA: Evolutions CARLA Conclusions Index
Virtual Worlds for the Perception and Control of Self-Driving Vehicles Dr. Antonio M. López antonio@cvc.uab.es Index Context SYNTHIA: CVPR 16 SYNTHIA: Reloaded SYNTHIA: Evolutions CARLA Conclusions Index