Detection and Tracking of the Vanishing Point on a Horizon for Automotive Applications
|
|
|
- Amberly McLaughlin
- 5 years ago
- Views:
Transcription
1 Detection and Tracking of the Vanishing Point on a Horizon for Automotive Applications Young-Woo Seo and Ragunathan (Raj) Rajkumar GM-CMU Autonomous Driving Collaborative Research Lab Carnegie Mellon University
2 Motivation Knowledge of a horizon line and the vanishing point on the horizon line provides us with the the important information about driving environments - Instantaneous driving direction of road - Image sub-regions about drivable regions - Search direction/region about road-occupants such as vehicles, pedestrians - Geometric relation between image plane and road plane

3 Motivation The location of the vanishing point on a horizon line provides important information about driving environments - Instantaneous driving direction of road - Image sub-regions about drivable Regions - Search direction of moving objects such as vehicles, pedestrians - Geometric relation between image plane and road plane

4 Motivation The location of the vanishing point on a horizon line provides important information about driving environments - Instantaneous driving direction of road - Image sub-regions about drivable Regions - Search direction of moving objects such as vehicles, pedestrians - Geometric relation between image plane and road plane [Rasmussen, 2004] Grouping dominant orientations for ill-structured road following

5 Motivation The location of the vanishing point on a horizon line provides important information about driving environments - Instantaneous driving direction of road - Image sub-regions about drivable Regions - Search direction of moving objects such as vehicles, pedestrians - Geometric relation between image plane and road plane [Moghadam and Dong, 2012] Road region detection from unpaved road images

6 Motivation The location of the vanishing point on a horizon line provides important information about driving environments - Instantaneous driving direction of road - Image sub-regions about drivable Regions - Search direction of moving objects such as vehicles, pedestrians - Geometric relation between image plane and road plane [Kong et al., 2009] Vanishing point detection for road detection

7 Motivation The location of the vanishing point on a horizon line provides important information about driving environments - Instantaneous driving direction of road - Image sub-regions about drivable Regions - Search direction of moving objects such as vehicles, pedestrians - Geometric relation between image plane and road plane [Miksik et al., 2011] Road-detection based on vanishing point detection

8 Motivation The location of the vanishing point on a horizon line provides important information about driving environments - Instantaneous driving direction of road - Image sub-regions about drivable Regions - Search direction of moving objects such as vehicles, pedestrians - Geometric relation between image plane and road plane
9 Motivation Knowledge of a horizon line and the vanishing point on the horizon line provides us with the information about the important information about driving environments However, the location of the vanishing point detected by frameby-frame basis may be inconsistent over frames, due to, primarily, 1) overfitted image features and 2) absence of relevant image features
10 Contents Vanishing Point Detection - Line extraction - Line classification: Vertical and Horizontal - Vanishing Point Detection through RANSAC Vanishing Point Tracking using EKF - Motion model - Observation model Vanishing Point Detection and Tracking Applications Experiments Summary and Future Work
11 Vanishing Point Detection: Overview Knowledge of a horizon line and the vanishing point on the horizon line provides us with the information about the important information about driving environments Fact: Two parallel lines appearing on a perspective image meet at a point, vanishing point - Line extraction - Line classification based on prior, [0, 0, 1] (horizontal), [0, 1, 0] (vertical) - Find vanishing points through RANSAC - Find one vanishing point from vertical line class and more than one vanishing point from horizontal line class
12 Vanishing Point Detection: Line Extraction Algorithm: Line Extraction 1. Execute Histogram Equalization to normalize an input image s intensity 2. Smooth the image w/ a Gaussian kernel to suppress noises 3. Compute the gradients of the image, and magnitudes and orientations of the gradient 4. Execute a bilateral filtering to preserve natural edges 5. Compute Canny edges to collect pixel groups 6. Remove those pixel groups of which extents are too small or too large 7. Fit a line segment to each of the pixel groups


13 Vanishing Point Detection: Line Extraction
14 Vanishing Point Detection: Line Classification
")
 Group the line into")
15 Vanishing Point Detection: Line Classification Given a line segment, 1) Compute the angle between the line and a vanishing point prior 2) Group the line into a vertical group if
![Vanishing Point Detection: Line Classification - Line extraction - Initial line classification based on prior, [0, 0, 1] (horizontal), [0, 1, 0] (vertical) - Find vanishing points through RANSAC -](/docs-images/89/101003865/images/16-0.jpg "Find the vanishing point from horizontal and vertical line groups - Choose a pair of lines to generate a hypothesis of vanishing point - Count the number of outliers based on orientation difference")
16 Vanishing Point Detection: Line Classification - Line extraction - Initial line classification based on prior, [0, 0, 1] (horizontal), [0, 1, 0] (vertical) - Find vanishing points through RANSAC - Find the vanishing point from horizontal and vertical line groups - Choose a pair of lines to generate a hypothesis of vanishing point - Count the number of outliers based on orientation difference (e.g., 5 degrees) - Claim the vp hypothesis that has the smallest number of outliers - Find one vanishing point from vertical line class and more than one vanishing point from horizontal line class Vertical lines in red and horizontal lines in blue
17 Vanishing Point Detection: An Example A vanishing point on horizon line Estimated Horizon line


18 Vanishing Point Detection: Detection Results



19 Vanishing Point Detection: Detection Results


20 Vanishing Point Detection: Detection Results
21 Vanishing Point Tracking: Overview Extended Kalman Filter for tracking the vanishing point on the horizon: - The locations of the vanishing point detected frame-by-frame basis may be inconsistent over the frames - Track the image coordinates of a vanishing point using the extracted lines, which are used for detecting the vanishing point - Smooth the detected locations of the vanishing point appearing on the horizon line, even with absence of relevant image features
22 Vanishing Point Tracking: Overview
23 Vanishing Point Tracking: Overview State? Initialization? Process Model? Measurement Model?
24 Vanishing Point Tracking: State Definition and Initialization The coordinates of the vanishing point are represented in the (normalized) camera coordinates Re-Initialization: Re-initialize the state when the coordinates of the estimated vanishing point are projected out of the image coordinate
25 Vanishing Point Tracking: Process Model Predict the coordinates of the vanishing point at the next frame No motion model (for now)
26 Vanishing Point Tracking: Measurement Model Predict the expected line from the predicted state T x ^ k = [ x k ; y k ]
27 Vanishing Point Tracking: Measurement Model Measurement update based on a line fidelity to the current vanishing point: The longer a line the lower chance it is an outlier
28 Vanishing Point Tracking: Summary
 Estimation of pitch angle: To compute metric information of interesting objects on ground plane [Seo and Rajkumar, 2014b]")
29 Vanishing Point Detection and Tracking: Applications Estimation of road driving direction: To improve the performance of lane-marking detection [Seo and Rajkumar, 2014a] (IV-2014) Estimation of pitch angle: To compute metric information of interesting objects on ground plane [Seo and Rajkumar, 2014b] (ITSC-14)
30 Metric Measurement: Homography Estimation of pitch angle: To compute metric information of interesting objects on ground plane [Seo and Rajkumar, 2014b]
31 Metric Measurement: Homography
32 Metric Measurement: Pitch Angle Estimation The underlying idea is to compute the pitch (or yaw) angles from the computation of the difference of coordinates between the camera center and the vanishing point on a horizon line
 Vanishing point location Camera center A: ~10m E: 10.16m A: ~5m E: 5.")
33 Metric Measurement: Model Verification A house foundation, Robot City, Estimated Pitch= ( degree) Vanishing point location Camera center A: ~10m E: 10.16m A: ~5m E: 5.35m Actual distance (A): ~15m Estimated distance (E): 14.88m
 A: ~5 m E: 5.6 m A: ~ 3m E: 3.25 m Actual distance: ~3m Estimated distance: 2.")
34 Metric Measurement: Model Verification Gesling Stadium, CMU Estimated Pitch= ( degree) A: ~5 m E: 5.6 m A: ~ 3m E: 3.25 m Actual distance: ~3m Estimated distance: 2.74 m
35 Metric Measurement: Example

36 Metric Measurement: Example
37 Experiments Experimental Settings - The developed algorithms were implemented in C++ and OpenCV and ran on a self-driving car at 10Hz. - Sensors and System: - Monocular vision sensor - Flea3 (FL3-GE-50S5C-C), CCD 2/3, 2448x2024 (1224x1024), 8fps - 8mm, HFOV=57.6, VFOV= Mounting height: 1.46m from the ground - Navigation solution - Applanix POS-LV w/ RTK corrections - RMS, 0.02 (0.06) degree pitch angle measurement with RTK corrections (GPS outage) - Testing roads - Mostly inter-city highways, i.e., I-376, I-279, I-76 - Some urban streets in Pittsburgh
38 Experimental Results: Pitch Angle Comparison Compare the pitch angles measured by IMU with that measured by the developed algorithm MSE= degree
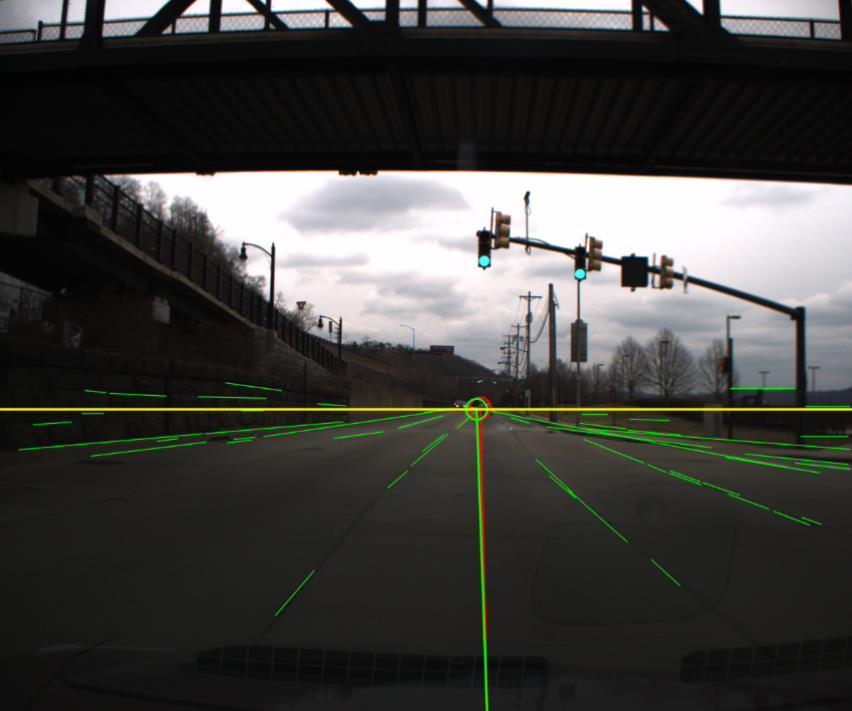
39 Vanishing Point Detection and Tracking: Video Green circle is the vanishing point tracked over the frames. Red circle is the one detected from each frame. Yellow horizontal line is a detected horizon line.
40 Summary and Future Work Developed a computer vision algorithm - Detected vanishing points using the extracted lines - Tracked, using EKF, the vanishing point on a horizon over frames Through testing with inter-city highways videos, we demonstrated that the developed algorithms produced stable and reliable performance in tracking the vanishing point on a horizon line Developed methods are used for 1) approximating road driving direction and 2) estimating the pitch angle between image and road plane More field testing: To determine the limits of our algorithms, continue testing it against various driving environments.
41 Acknowledgements I would like to thank Dr. Myung Hwangbo for fruitful discussion about 3D vision, Junsung Kim for data collection, and Prof. Raj Rajkumar for his support on this work. Thank You Questions or Comments? young-woo.seo@ri.cmu.edu
Visione per il veicolo Paolo Medici 2017/ Visual Perception
 Visione per il veicolo Paolo Medici 2017/2018 02 Visual Perception Today Sensor Suite for Autonomous Vehicle ADAS Hardware for ADAS Sensor Suite Which sensor do you know? Which sensor suite for Which algorithms
Visione per il veicolo Paolo Medici 2017/2018 02 Visual Perception Today Sensor Suite for Autonomous Vehicle ADAS Hardware for ADAS Sensor Suite Which sensor do you know? Which sensor suite for Which algorithms
GPS data correction using encoders and INS sensors
 GPS data correction using encoders and INS sensors Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, Avenue de la Renaissance 30, 1000 Brussels, Belgium sidahmed.berrabah@rma.ac.be
GPS data correction using encoders and INS sensors Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, Avenue de la Renaissance 30, 1000 Brussels, Belgium sidahmed.berrabah@rma.ac.be
Sensor Fusion for Navigation in Degraded Environements
 Sensor Fusion for Navigation in Degraded Environements David M. Bevly Professor Director of the GPS and Vehicle Dynamics Lab dmbevly@eng.auburn.edu (334) 844-3446 GPS and Vehicle Dynamics Lab Auburn University
Sensor Fusion for Navigation in Degraded Environements David M. Bevly Professor Director of the GPS and Vehicle Dynamics Lab dmbevly@eng.auburn.edu (334) 844-3446 GPS and Vehicle Dynamics Lab Auburn University
GNSS in Autonomous Vehicles MM Vision
 GNSS in Autonomous Vehicles MM Vision MM Technology Innovation Automated Driving Technologies (ADT) Evaldo Bruci Context & motivation Within the robotic paradigm Magneti Marelli chose Think & Decision
GNSS in Autonomous Vehicles MM Vision MM Technology Innovation Automated Driving Technologies (ADT) Evaldo Bruci Context & motivation Within the robotic paradigm Magneti Marelli chose Think & Decision
Intelligent Transport Systems and GNSS. ITSNT 2017 ENAC, Toulouse, France 11/ Nobuaki Kubo (TUMSAT)
") Intelligent Transport Systems and GNSS ITSNT 2017 ENAC, Toulouse, France 11/14-17 2017 Nobuaki Kubo (TUMSAT) Contents ITS applications in Japan How can GNSS contribute to ITS? Current performance of GNSS
Intelligent Transport Systems and GNSS ITSNT 2017 ENAC, Toulouse, France 11/14-17 2017 Nobuaki Kubo (TUMSAT) Contents ITS applications in Japan How can GNSS contribute to ITS? Current performance of GNSS
Pedestrian Navigation System Using. Shoe-mounted INS. By Yan Li. A thesis submitted for the degree of Master of Engineering (Research)
") Pedestrian Navigation System Using Shoe-mounted INS By Yan Li A thesis submitted for the degree of Master of Engineering (Research) Faculty of Engineering and Information Technology University of Technology,
Pedestrian Navigation System Using Shoe-mounted INS By Yan Li A thesis submitted for the degree of Master of Engineering (Research) Faculty of Engineering and Information Technology University of Technology,
and Vehicle Sensors in Urban Environment
 AvailabilityImprovement ofrtk GPS GPSwithIMU and Vehicle Sensors in Urban Environment ION GPS/GNSS 2012 Tk Tokyo University it of Marine Si Science and Technology Nobuaki Kubo, Chen Dihan 1 Contents Background
AvailabilityImprovement ofrtk GPS GPSwithIMU and Vehicle Sensors in Urban Environment ION GPS/GNSS 2012 Tk Tokyo University it of Marine Si Science and Technology Nobuaki Kubo, Chen Dihan 1 Contents Background
A Positon and Orientation Post-Processing Software Package for Land Applications - New Technology
 A Positon and Orientation Post-Processing Software Package for Land Applications - New Technology Tatyana Bourke, Applanix Corporation Abstract This paper describes a post-processing software package that
A Positon and Orientation Post-Processing Software Package for Land Applications - New Technology Tatyana Bourke, Applanix Corporation Abstract This paper describes a post-processing software package that
Classification of Road Images for Lane Detection
 Classification of Road Images for Lane Detection Mingyu Kim minkyu89@stanford.edu Insun Jang insunj@stanford.edu Eunmo Yang eyang89@stanford.edu 1. Introduction In the research on autonomous car, it is
Classification of Road Images for Lane Detection Mingyu Kim minkyu89@stanford.edu Insun Jang insunj@stanford.edu Eunmo Yang eyang89@stanford.edu 1. Introduction In the research on autonomous car, it is
ADVANCED GNSS ALGORITHMS FOR SAFE AUTONOMOUS VEHICLES
 ION GNSS+ 2017 ADVANCED GNSS ALGORITHMS FOR SAFE AUTONOMOUS VEHICLES SEPTEMBER 29 TH, 2017 ION GNSS+ 2017, PORTLAND, OREGON, USA SESSION A5: Autonomous and Assisted Vehicle Applications Property of GMV
ION GNSS+ 2017 ADVANCED GNSS ALGORITHMS FOR SAFE AUTONOMOUS VEHICLES SEPTEMBER 29 TH, 2017 ION GNSS+ 2017, PORTLAND, OREGON, USA SESSION A5: Autonomous and Assisted Vehicle Applications Property of GMV
Vision-based Localization and Mapping with Heterogeneous Teams of Ground and Micro Flying Robots
 Vision-based Localization and Mapping with Heterogeneous Teams of Ground and Micro Flying Robots Davide Scaramuzza Robotics and Perception Group University of Zurich http://rpg.ifi.uzh.ch All videos in
Vision-based Localization and Mapping with Heterogeneous Teams of Ground and Micro Flying Robots Davide Scaramuzza Robotics and Perception Group University of Zurich http://rpg.ifi.uzh.ch All videos in
A software video stabilization system for automotive oriented applications
 A software video stabilization system for automotive oriented applications A. Broggi, P. Grisleri Dipartimento di Ingegneria dellinformazione Universita degli studi di Parma 43100 Parma, Italy Email: {broggi,
A software video stabilization system for automotive oriented applications A. Broggi, P. Grisleri Dipartimento di Ingegneria dellinformazione Universita degli studi di Parma 43100 Parma, Italy Email: {broggi,
SIS63-Building the Future-Advanced Integrated Safety Applications: interactive Perception platform and fusion modules results
 SIS63-Building the Future-Advanced Integrated Safety Applications: interactive Perception platform and fusion modules results Angelos Amditis (ICCS) and Lali Ghosh (DEL) 18 th October 2013 20 th ITS World
SIS63-Building the Future-Advanced Integrated Safety Applications: interactive Perception platform and fusion modules results Angelos Amditis (ICCS) and Lali Ghosh (DEL) 18 th October 2013 20 th ITS World
Intelligent Vehicle Localization Using GPS, Compass, and Machine Vision
 The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15, 2009 St. Louis, USA Intelligent Vehicle Localization Using GPS, Compass, and Machine Vision Somphop Limsoonthrakul,
The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15, 2009 St. Louis, USA Intelligent Vehicle Localization Using GPS, Compass, and Machine Vision Somphop Limsoonthrakul,
High Precision GNSS in Automotive
 High Precision GNSS in Automotive Jonathan Auld, VP Engineering and Safety 6, March, 2018 2 Global OEM Positioning Solutions and Services for Land, Sea, and Air. GNSS in Automotive Today Today the primary
High Precision GNSS in Automotive Jonathan Auld, VP Engineering and Safety 6, March, 2018 2 Global OEM Positioning Solutions and Services for Land, Sea, and Air. GNSS in Automotive Today Today the primary
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS. Sergii Bykov Technical Lead Machine Learning 12 Oct 2017
 23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
Moving Object Detection for Intelligent Visual Surveillance
 Moving Object Detection for Intelligent Visual Surveillance Ph.D. Candidate: Jae Kyu Suhr Advisor : Prof. Jaihie Kim April 29, 2011 Contents 1 Motivation & Contributions 2 Background Compensation for PTZ
Moving Object Detection for Intelligent Visual Surveillance Ph.D. Candidate: Jae Kyu Suhr Advisor : Prof. Jaihie Kim April 29, 2011 Contents 1 Motivation & Contributions 2 Background Compensation for PTZ
Cooperative localization (part I) Jouni Rantakokko
 Jouni Rantakokko") Cooperative localization (part I) Jouni Rantakokko Cooperative applications / approaches Wireless sensor networks Robotics Pedestrian localization First responders Localization sensors - Small, low-cost
Cooperative localization (part I) Jouni Rantakokko Cooperative applications / approaches Wireless sensor networks Robotics Pedestrian localization First responders Localization sensors - Small, low-cost
Implementation of License Plate Recognition System in ARM Cortex A8 Board
 www..org 9 Implementation of License Plate Recognition System in ARM Cortex A8 Board S. Uma 1, M.Sharmila 2 1 Assistant Professor, 2 Research Scholar, Department of Electrical and Electronics Engg, College
www..org 9 Implementation of License Plate Recognition System in ARM Cortex A8 Board S. Uma 1, M.Sharmila 2 1 Assistant Professor, 2 Research Scholar, Department of Electrical and Electronics Engg, College
Inertially Aided RTK Performance Evaluation
 Inertially Aided RTK Performance Evaluation Bruno M. Scherzinger, Applanix Corporation, Richmond Hill, Ontario, Canada BIOGRAPHY Dr. Bruno M. Scherzinger obtained the B.Eng. degree from McGill University
Inertially Aided RTK Performance Evaluation Bruno M. Scherzinger, Applanix Corporation, Richmond Hill, Ontario, Canada BIOGRAPHY Dr. Bruno M. Scherzinger obtained the B.Eng. degree from McGill University
Technical Notes LAND MAPPING APPLICATIONS. Leading the way with increased reliability.
 LAND MAPPING APPLICATIONS Technical Notes Leading the way with increased reliability. Industry-leading post-processing software designed to maximize the accuracy potential of your POS LV (Position and
LAND MAPPING APPLICATIONS Technical Notes Leading the way with increased reliability. Industry-leading post-processing software designed to maximize the accuracy potential of your POS LV (Position and
Geometry-Based Populated Chessboard Recognition
 Geometry-Based Populated Chessboard Recognition whoff@mines.edu Colorado School of Mines Golden, Colorado, USA William Hoff bill.hoff@daqri.com DAQRI Vienna, Austria My co-authors: Youye Xie, Gongguo Tang
Geometry-Based Populated Chessboard Recognition whoff@mines.edu Colorado School of Mines Golden, Colorado, USA William Hoff bill.hoff@daqri.com DAQRI Vienna, Austria My co-authors: Youye Xie, Gongguo Tang
Detection of License Plates of Vehicles
 13 W. K. I. L Wanniarachchi 1, D. U. J. Sonnadara 2 and M. K. Jayananda 2 1 Faculty of Science and Technology, Uva Wellassa University, Sri Lanka 2 Department of Physics, University of Colombo, Sri Lanka
13 W. K. I. L Wanniarachchi 1, D. U. J. Sonnadara 2 and M. K. Jayananda 2 1 Faculty of Science and Technology, Uva Wellassa University, Sri Lanka 2 Department of Physics, University of Colombo, Sri Lanka
Lane Detection in Automotive
 Lane Detection in Automotive Contents Introduction... 2 Image Processing... 2 Reading an image... 3 RGB to Gray... 3 Mean and Gaussian filtering... 5 Defining our Region of Interest... 6 BirdsEyeView Transformation...
Lane Detection in Automotive Contents Introduction... 2 Image Processing... 2 Reading an image... 3 RGB to Gray... 3 Mean and Gaussian filtering... 5 Defining our Region of Interest... 6 BirdsEyeView Transformation...
COMPARATIVE PERFORMANCE ANALYSIS OF HAND GESTURE RECOGNITION TECHNIQUES
 International Journal of Advanced Research in Engineering and Technology (IJARET) Volume 9, Issue 3, May - June 2018, pp. 177 185, Article ID: IJARET_09_03_023 Available online at http://www.iaeme.com/ijaret/issues.asp?jtype=ijaret&vtype=9&itype=3
International Journal of Advanced Research in Engineering and Technology (IJARET) Volume 9, Issue 3, May - June 2018, pp. 177 185, Article ID: IJARET_09_03_023 Available online at http://www.iaeme.com/ijaret/issues.asp?jtype=ijaret&vtype=9&itype=3
TEAM AERO-I TEAM AERO-I JOURNAL PAPER DELHI TECHNOLOGICAL UNIVERSITY Journal paper for IARC 2014
 TEAM AERO-I TEAM AERO-I JOURNAL PAPER DELHI TECHNOLOGICAL UNIVERSITY DELHI TECHNOLOGICAL UNIVERSITY Journal paper for IARC 2014 2014 IARC ABSTRACT The paper gives prominence to the technical details of
TEAM AERO-I TEAM AERO-I JOURNAL PAPER DELHI TECHNOLOGICAL UNIVERSITY DELHI TECHNOLOGICAL UNIVERSITY Journal paper for IARC 2014 2014 IARC ABSTRACT The paper gives prominence to the technical details of
Project Overview Mapping Technology Assessment for Connected Vehicle Highway Network Applications
 Project Overview Mapping Technology Assessment for Connected Vehicle Highway Network Applications AASHTO GIS-T Symposium April 2012 Table Of Contents Connected Vehicle Program Goals Mapping Technology
Project Overview Mapping Technology Assessment for Connected Vehicle Highway Network Applications AASHTO GIS-T Symposium April 2012 Table Of Contents Connected Vehicle Program Goals Mapping Technology
Cooperative navigation (part II)
") Cooperative navigation (part II) An example using foot-mounted INS and UWB-transceivers Jouni Rantakokko Aim Increased accuracy during long-term operations in GNSS-challenged environments for - First responders
Cooperative navigation (part II) An example using foot-mounted INS and UWB-transceivers Jouni Rantakokko Aim Increased accuracy during long-term operations in GNSS-challenged environments for - First responders
Digital Image Processing. Lecture # 6 Corner Detection & Color Processing
 Digital Image Processing Lecture # 6 Corner Detection & Color Processing 1 Corners Corners (interest points) Unlike edges, corners (patches of pixels surrounding the corner) do not necessarily correspond
Digital Image Processing Lecture # 6 Corner Detection & Color Processing 1 Corners Corners (interest points) Unlike edges, corners (patches of pixels surrounding the corner) do not necessarily correspond
FLCS V2.1. AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station
 AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station The platform provides a high performance basis for electromechanical system control. Originally designed for autonomous aerial vehicle
AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station The platform provides a high performance basis for electromechanical system control. Originally designed for autonomous aerial vehicle
Robots Leaving the Production Halls Opportunities and Challenges
 Shaping the future Robots Leaving the Production Halls Opportunities and Challenges Prof. Dr. Roland Siegwart www.asl.ethz.ch www.wysszurich.ch APAC INNOVATION SUMMIT 17 Hong Kong Science Park Science,
Shaping the future Robots Leaving the Production Halls Opportunities and Challenges Prof. Dr. Roland Siegwart www.asl.ethz.ch www.wysszurich.ch APAC INNOVATION SUMMIT 17 Hong Kong Science Park Science,
Android Test Apps documentation
 Uncanny Vision Android Test Apps documentation Revised on: 6th Oct 2014 Contents Introduction Image Recognition Demo Introduction How the App works How to install Setting Reference Image How to test Which
Uncanny Vision Android Test Apps documentation Revised on: 6th Oct 2014 Contents Introduction Image Recognition Demo Introduction How the App works How to install Setting Reference Image How to test Which
interactive IP: Perception platform and modules
 interactive IP: Perception platform and modules Angelos Amditis, ICCS 19 th ITS-WC-SIS76: Advanced integrated safety applications based on enhanced perception, active interventions and new advanced sensors
interactive IP: Perception platform and modules Angelos Amditis, ICCS 19 th ITS-WC-SIS76: Advanced integrated safety applications based on enhanced perception, active interventions and new advanced sensors
Project #3 Seam Carving
 15-463 Project #3 Seam Carving Caroline Hermans For this project, I implemented a Seam Carving algorithm that reduces the size of images without losing important details. Rather than scaling the image,
15-463 Project #3 Seam Carving Caroline Hermans For this project, I implemented a Seam Carving algorithm that reduces the size of images without losing important details. Rather than scaling the image,
GPS-Aided INS Datasheet Rev. 2.6
 GPS-Aided INS 1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO and BEIDOU navigation
GPS-Aided INS 1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO and BEIDOU navigation
NTU Robot PAL 2009 Team Report
 NTU Robot PAL 2009 Team Report Chieh-Chih Wang, Shao-Chen Wang, Hsiao-Chieh Yen, and Chun-Hua Chang The Robot Perception and Learning Laboratory Department of Computer Science and Information Engineering
NTU Robot PAL 2009 Team Report Chieh-Chih Wang, Shao-Chen Wang, Hsiao-Chieh Yen, and Chun-Hua Chang The Robot Perception and Learning Laboratory Department of Computer Science and Information Engineering
Road Boundary Estimation in Construction Sites Michael Darms, Matthias Komar, Dirk Waldbauer, Stefan Lüke
 Road Boundary Estimation in Construction Sites Michael Darms, Matthias Komar, Dirk Waldbauer, Stefan Lüke Lanes in Construction Sites Roadway is often bounded by elevated objects (e.g. guidance walls)
Road Boundary Estimation in Construction Sites Michael Darms, Matthias Komar, Dirk Waldbauer, Stefan Lüke Lanes in Construction Sites Roadway is often bounded by elevated objects (e.g. guidance walls)
Computer Vision Robotics I Prof. Yanco Spring 2015
 Computer Vision 91.450 Robotics I Prof. Yanco Spring 2015 RGB Color Space Lighting impacts color values! HSV Color Space Hue, the color type (such as red, blue, or yellow); Measured in values of 0-360
Computer Vision 91.450 Robotics I Prof. Yanco Spring 2015 RGB Color Space Lighting impacts color values! HSV Color Space Hue, the color type (such as red, blue, or yellow); Measured in values of 0-360
Virtual testing by coupling high fidelity vehicle simulation with microscopic traffic flow simulation
 DYNA4 with DYNAanimation in Co-Simulation with SUMO vehicle under test Virtual testing by coupling high fidelity vehicle simulation with microscopic traffic flow simulation Dr.-Ing. Jakob Kaths TESIS GmbH
DYNA4 with DYNAanimation in Co-Simulation with SUMO vehicle under test Virtual testing by coupling high fidelity vehicle simulation with microscopic traffic flow simulation Dr.-Ing. Jakob Kaths TESIS GmbH
CORRECTED VISION. Here be underscores THE ROLE OF CAMERA AND LENS PARAMETERS IN REAL-WORLD MEASUREMENT
 Here be underscores CORRECTED VISION THE ROLE OF CAMERA AND LENS PARAMETERS IN REAL-WORLD MEASUREMENT JOSEPH HOWSE, NUMMIST MEDIA CIG-GANS WORKSHOP: 3-D COLLECTION, ANALYSIS AND VISUALIZATION LAWRENCETOWN,
Here be underscores CORRECTED VISION THE ROLE OF CAMERA AND LENS PARAMETERS IN REAL-WORLD MEASUREMENT JOSEPH HOWSE, NUMMIST MEDIA CIG-GANS WORKSHOP: 3-D COLLECTION, ANALYSIS AND VISUALIZATION LAWRENCETOWN,
Integrated Navigation System
 Integrated Navigation System Adhika Lie adhika@aem.umn.edu AEM 5333: Design, Build, Model, Simulate, Test and Fly Small Uninhabited Aerial Vehicles Feb 14, 2013 1 Navigation System Where am I? Position,
Integrated Navigation System Adhika Lie adhika@aem.umn.edu AEM 5333: Design, Build, Model, Simulate, Test and Fly Small Uninhabited Aerial Vehicles Feb 14, 2013 1 Navigation System Where am I? Position,
COGNITIVE MODEL OF MOBILE ROBOT WORKSPACE
 COGNITIVE MODEL OF MOBILE ROBOT WORKSPACE Prof.dr.sc. Mladen Crneković, University of Zagreb, FSB, I. Lučića 5, 10000 Zagreb Prof.dr.sc. Davor Zorc, University of Zagreb, FSB, I. Lučića 5, 10000 Zagreb
COGNITIVE MODEL OF MOBILE ROBOT WORKSPACE Prof.dr.sc. Mladen Crneković, University of Zagreb, FSB, I. Lučića 5, 10000 Zagreb Prof.dr.sc. Davor Zorc, University of Zagreb, FSB, I. Lučića 5, 10000 Zagreb
COST Action: TU1302 Action Title: Satellite Positioning Performance Assessment for Road Transport SaPPART. STSM Scientific Report
 COST Action: TU1302 Action Title: Satellite Positioning Performance Assessment for Road Transport SaPPART STSM Scientific Report Assessing the performances of Hybrid positioning system COST STSM Reference
COST Action: TU1302 Action Title: Satellite Positioning Performance Assessment for Road Transport SaPPART STSM Scientific Report Assessing the performances of Hybrid positioning system COST STSM Reference
Global Image Sensor Market with Focus on Automotive CMOS Sensors: Industry Analysis & Outlook ( )
") Industry Research by Koncept Analytics Global Image Sensor Market with Focus on Automotive CMOS Sensors: Industry Analysis & Outlook ----------------------------------------- (2017-2021) October 2017 Global
Industry Research by Koncept Analytics Global Image Sensor Market with Focus on Automotive CMOS Sensors: Industry Analysis & Outlook ----------------------------------------- (2017-2021) October 2017 Global
Development of a Low-order Adaptive Optics System at Udaipur Solar Observatory
 J. Astrophys. Astr. (2008) 29, 353 357 Development of a Low-order Adaptive Optics System at Udaipur Solar Observatory A. R. Bayanna, B. Kumar, R. E. Louis, P. Venkatakrishnan & S. K. Mathew Udaipur Solar
J. Astrophys. Astr. (2008) 29, 353 357 Development of a Low-order Adaptive Optics System at Udaipur Solar Observatory A. R. Bayanna, B. Kumar, R. E. Louis, P. Venkatakrishnan & S. K. Mathew Udaipur Solar
Robotics Enabling Autonomy in Challenging Environments
 Robotics Enabling Autonomy in Challenging Environments Ioannis Rekleitis Computer Science and Engineering, University of South Carolina CSCE 190 21 Oct. 2014 Ioannis Rekleitis 1 Why Robotics? Mars exploration
Robotics Enabling Autonomy in Challenging Environments Ioannis Rekleitis Computer Science and Engineering, University of South Carolina CSCE 190 21 Oct. 2014 Ioannis Rekleitis 1 Why Robotics? Mars exploration
Computer and Machine Vision
 Computer and Machine Vision Lecture Week 7 Part-2 (Exam #1 Review) February 26, 2014 Sam Siewert Outline of Week 7 Basic Convolution Transform Speed-Up Concepts for Computer Vision Hough Linear Transform
Computer and Machine Vision Lecture Week 7 Part-2 (Exam #1 Review) February 26, 2014 Sam Siewert Outline of Week 7 Basic Convolution Transform Speed-Up Concepts for Computer Vision Hough Linear Transform
Roadside Range Sensors for Intersection Decision Support
 Roadside Range Sensors for Intersection Decision Support Arvind Menon, Alec Gorjestani, Craig Shankwitz and Max Donath, Member, IEEE Abstract The Intelligent Transportation Institute at the University
Roadside Range Sensors for Intersection Decision Support Arvind Menon, Alec Gorjestani, Craig Shankwitz and Max Donath, Member, IEEE Abstract The Intelligent Transportation Institute at the University
Real- Time Computer Vision and Robotics Using Analog VLSI Circuits
 750 Koch, Bair, Harris, Horiuchi, Hsu and Luo Real- Time Computer Vision and Robotics Using Analog VLSI Circuits Christof Koch Wyeth Bair John. Harris Timothy Horiuchi Andrew Hsu Jin Luo Computation and
750 Koch, Bair, Harris, Horiuchi, Hsu and Luo Real- Time Computer Vision and Robotics Using Analog VLSI Circuits Christof Koch Wyeth Bair John. Harris Timothy Horiuchi Andrew Hsu Jin Luo Computation and
SENLUTION Miniature Angular & Heading Reference System The World s Smallest Mini-AHRS
 SENLUTION Miniature Angular & Heading Reference System The World s Smallest Mini-AHRS MotionCore, the smallest size AHRS in the world, is an ultra-small form factor, highly accurate inertia system based
SENLUTION Miniature Angular & Heading Reference System The World s Smallest Mini-AHRS MotionCore, the smallest size AHRS in the world, is an ultra-small form factor, highly accurate inertia system based
COS Lecture 7 Autonomous Robot Navigation
 COS 495 - Lecture 7 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
COS 495 - Lecture 7 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
Baset Adult-Size 2016 Team Description Paper
 Baset Adult-Size 2016 Team Description Paper Mojtaba Hosseini, Vahid Mohammadi, Farhad Jafari 2, Dr. Esfandiar Bamdad 1 1 Humanoid Robotic Laboratory, Robotic Center, Baset Pazhuh Tehran company. No383,
Baset Adult-Size 2016 Team Description Paper Mojtaba Hosseini, Vahid Mohammadi, Farhad Jafari 2, Dr. Esfandiar Bamdad 1 1 Humanoid Robotic Laboratory, Robotic Center, Baset Pazhuh Tehran company. No383,
Dual-fisheye Lens Stitching for 360-degree Imaging & Video. Tuan Ho, PhD. Student Electrical Engineering Dept., UT Arlington
 Dual-fisheye Lens Stitching for 360-degree Imaging & Video Tuan Ho, PhD. Student Electrical Engineering Dept., UT Arlington Introduction 360-degree imaging: the process of taking multiple photographs and
Dual-fisheye Lens Stitching for 360-degree Imaging & Video Tuan Ho, PhD. Student Electrical Engineering Dept., UT Arlington Introduction 360-degree imaging: the process of taking multiple photographs and
Automatic optical measurement of high density fiber connector
 Key Engineering Materials Online: 2014-08-11 ISSN: 1662-9795, Vol. 625, pp 305-309 doi:10.4028/www.scientific.net/kem.625.305 2015 Trans Tech Publications, Switzerland Automatic optical measurement of
Key Engineering Materials Online: 2014-08-11 ISSN: 1662-9795, Vol. 625, pp 305-309 doi:10.4028/www.scientific.net/kem.625.305 2015 Trans Tech Publications, Switzerland Automatic optical measurement of
RECONFIGURABLE SLAM UTILISING FUZZY REASONING
 RECONFIGURABLE SLAM UTILISING FUZZY REASONING Dr. Affan Shaukat Abhinav Bajpai Prof Yang Gao 13th Symposium on Advanced Space Technologies in Robotics and Automation ASTRA 2015 11-13 May ESA/ESTEC, Noordwijk,
RECONFIGURABLE SLAM UTILISING FUZZY REASONING Dr. Affan Shaukat Abhinav Bajpai Prof Yang Gao 13th Symposium on Advanced Space Technologies in Robotics and Automation ASTRA 2015 11-13 May ESA/ESTEC, Noordwijk,
Anti-shaking Algorithm for the Mobile Phone Camera in Dim Light Conditions
 Anti-shaking Algorithm for the Mobile Phone Camera in Dim Light Conditions Jong-Ho Lee, In-Yong Shin, Hyun-Goo Lee 2, Tae-Yoon Kim 2, and Yo-Sung Ho Gwangju Institute of Science and Technology (GIST) 26
Anti-shaking Algorithm for the Mobile Phone Camera in Dim Light Conditions Jong-Ho Lee, In-Yong Shin, Hyun-Goo Lee 2, Tae-Yoon Kim 2, and Yo-Sung Ho Gwangju Institute of Science and Technology (GIST) 26
Recognizing Panoramas
 Recognizing Panoramas Kevin Luo Stanford University 450 Serra Mall, Stanford, CA 94305 kluo8128@stanford.edu Abstract This project concerns the topic of panorama stitching. Given a set of overlapping photos,
Recognizing Panoramas Kevin Luo Stanford University 450 Serra Mall, Stanford, CA 94305 kluo8128@stanford.edu Abstract This project concerns the topic of panorama stitching. Given a set of overlapping photos,
OPEN CV BASED AUTONOMOUS RC-CAR
 OPEN CV BASED AUTONOMOUS RC-CAR B. Sabitha 1, K. Akila 2, S.Krishna Kumar 3, D.Mohan 4, P.Nisanth 5 1,2 Faculty, Department of Mechatronics Engineering, Kumaraguru College of Technology, Coimbatore, India
OPEN CV BASED AUTONOMOUS RC-CAR B. Sabitha 1, K. Akila 2, S.Krishna Kumar 3, D.Mohan 4, P.Nisanth 5 1,2 Faculty, Department of Mechatronics Engineering, Kumaraguru College of Technology, Coimbatore, India
Advances in Vehicle Periphery Sensing Techniques Aimed at Realizing Autonomous Driving
 FEATURED ARTICLES Autonomous Driving Technology for Connected Cars Advances in Vehicle Periphery Sensing Techniques Aimed at Realizing Autonomous Driving Progress is being made on vehicle periphery sensing,
FEATURED ARTICLES Autonomous Driving Technology for Connected Cars Advances in Vehicle Periphery Sensing Techniques Aimed at Realizing Autonomous Driving Progress is being made on vehicle periphery sensing,
Improving Integrity and Reliability of Map Matching Techniques
 Journal of Global Positioning Systems (2006) Vol. 5, No. 1-2:40-46 Improving Integrity and Reliability of Map Matching Techniques Meng Yu, Zhilin Li, Yongqi Chen, and Wu Chen Department of Land Surveying
Journal of Global Positioning Systems (2006) Vol. 5, No. 1-2:40-46 Improving Integrity and Reliability of Map Matching Techniques Meng Yu, Zhilin Li, Yongqi Chen, and Wu Chen Department of Land Surveying
A Vehicular Visual Tracking System Incorporating Global Positioning System
 A Vehicular Visual Tracking System Incorporating Global Positioning System Hsien-Chou Liao and Yu-Shiang Wang Abstract Surveillance system is widely used in the traffic monitoring. The deployment of cameras
A Vehicular Visual Tracking System Incorporating Global Positioning System Hsien-Chou Liao and Yu-Shiang Wang Abstract Surveillance system is widely used in the traffic monitoring. The deployment of cameras
Smart traffic control with ambulance detection
 IOP Conference Series: Materials Science and Engineering PAPER OPEN ACCESS Smart traffic control with ambulance detection To cite this article: Varsha Srinivasan et al 2018 IOP Conf. Ser.: Mater. Sci.
IOP Conference Series: Materials Science and Engineering PAPER OPEN ACCESS Smart traffic control with ambulance detection To cite this article: Varsha Srinivasan et al 2018 IOP Conf. Ser.: Mater. Sci.
Deblurring. Basics, Problem definition and variants
 Deblurring Basics, Problem definition and variants Kinds of blur Hand-shake Defocus Credit: Kenneth Josephson Motion Credit: Kenneth Josephson Kinds of blur Spatially invariant vs. Spatially varying
Deblurring Basics, Problem definition and variants Kinds of blur Hand-shake Defocus Credit: Kenneth Josephson Motion Credit: Kenneth Josephson Kinds of blur Spatially invariant vs. Spatially varying
Method of color interpolation in a single sensor color camera using green channel separation
 University of Wollongong Research Online Faculty of nformatics - Papers (Archive) Faculty of Engineering and nformation Sciences 2002 Method of color interpolation in a single sensor color camera using
University of Wollongong Research Online Faculty of nformatics - Papers (Archive) Faculty of Engineering and nformation Sciences 2002 Method of color interpolation in a single sensor color camera using
An Efficient Color Image Segmentation using Edge Detection and Thresholding Methods
 19 An Efficient Color Image Segmentation using Edge Detection and Thresholding Methods T.Arunachalam* Post Graduate Student, P.G. Dept. of Computer Science, Govt Arts College, Melur - 625 106 Email-Arunac682@gmail.com
19 An Efficient Color Image Segmentation using Edge Detection and Thresholding Methods T.Arunachalam* Post Graduate Student, P.G. Dept. of Computer Science, Govt Arts College, Melur - 625 106 Email-Arunac682@gmail.com
Recent Advances in Image Deblurring. Seungyong Lee (Collaboration w/ Sunghyun Cho)
") Recent Advances in Image Deblurring Seungyong Lee (Collaboration w/ Sunghyun Cho) Disclaimer Many images and figures in this course note have been copied from the papers and presentation materials of previous
Recent Advances in Image Deblurring Seungyong Lee (Collaboration w/ Sunghyun Cho) Disclaimer Many images and figures in this course note have been copied from the papers and presentation materials of previous
Global Navigation Satellite System (GNSS) for Disaster Mitigation
 for Disaster Mitigation") Global Navigation Satellite System (GNSS) for Disaster Mitigation By Chathura H. Wickramasinghe Geoinformatics Center Asian Institute of Technology Establish in 1959 as a Post Graduate School Catering
Global Navigation Satellite System (GNSS) for Disaster Mitigation By Chathura H. Wickramasinghe Geoinformatics Center Asian Institute of Technology Establish in 1959 as a Post Graduate School Catering
Driver Assistance and Awareness Applications
 Using s as Automotive Sensors Driver Assistance and Awareness Applications Faroog Ibrahim Visteon Corporation GNSS is all about positioning, sure. But for most automotive applications we need a map to
Using s as Automotive Sensors Driver Assistance and Awareness Applications Faroog Ibrahim Visteon Corporation GNSS is all about positioning, sure. But for most automotive applications we need a map to
Analysis of Trailer Position Error in an Autonomous Robot-Trailer System With Sensor Noise
 Analysis of Trailer Position Error in an Autonomous Robot-Trailer System With Sensor Noise David W. Hodo, John Y. Hung, David M. Bevly, and D. Scott Millhouse Electrical & Computer Engineering Dept. Auburn
Analysis of Trailer Position Error in an Autonomous Robot-Trailer System With Sensor Noise David W. Hodo, John Y. Hung, David M. Bevly, and D. Scott Millhouse Electrical & Computer Engineering Dept. Auburn
A Vehicular Visual Tracking System Incorporating Global Positioning System
 A Vehicular Visual Tracking System Incorporating Global Positioning System Hsien-Chou Liao and Yu-Shiang Wang Abstract Surveillance system is widely used in the traffic monitoring. The deployment of cameras
A Vehicular Visual Tracking System Incorporating Global Positioning System Hsien-Chou Liao and Yu-Shiang Wang Abstract Surveillance system is widely used in the traffic monitoring. The deployment of cameras
Integrated Driving Aware System in the Real-World: Sensing, Computing and Feedback
 Integrated Driving Aware System in the Real-World: Sensing, Computing and Feedback Jung Wook Park HCI Institute Carnegie Mellon University 5000 Forbes Avenue Pittsburgh, PA, USA, 15213 jungwoop@andrew.cmu.edu
Integrated Driving Aware System in the Real-World: Sensing, Computing and Feedback Jung Wook Park HCI Institute Carnegie Mellon University 5000 Forbes Avenue Pittsburgh, PA, USA, 15213 jungwoop@andrew.cmu.edu
International Journal of Informative & Futuristic Research ISSN (Online):
:") Reviewed Paper Volume 2 Issue 4 December 2014 International Journal of Informative & Futuristic Research ISSN (Online): 2347-1697 A Survey On Simultaneous Localization And Mapping Paper ID IJIFR/ V2/ E4/
Reviewed Paper Volume 2 Issue 4 December 2014 International Journal of Informative & Futuristic Research ISSN (Online): 2347-1697 A Survey On Simultaneous Localization And Mapping Paper ID IJIFR/ V2/ E4/
A Vehicular Visual Tracking System Incorporating Global Positioning System
 Vol:5, :6, 20 A Vehicular Visual Tracking System Incorporating Global Positioning System Hsien-Chou Liao and Yu-Shiang Wang International Science Index, Computer and Information Engineering Vol:5, :6,
Vol:5, :6, 20 A Vehicular Visual Tracking System Incorporating Global Positioning System Hsien-Chou Liao and Yu-Shiang Wang International Science Index, Computer and Information Engineering Vol:5, :6,
Walking and Flying Robots for Challenging Environments
 Shaping the future Walking and Flying Robots for Challenging Environments Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch Lisbon, Portugal, July 29, 2016 Roland Siegwart 29.07.2016 1 Content
Shaping the future Walking and Flying Robots for Challenging Environments Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch Lisbon, Portugal, July 29, 2016 Roland Siegwart 29.07.2016 1 Content
Revisions Revision Date By Changes A 11 Feb 2013 MHA Initial release , Xsens Technologies B.V. All rights reserved. Information in this docum
 MTi 10-series and MTi 100-series Document MT0503P, Revision 0 (DRAFT), 11 Feb 2013 Xsens Technologies B.V. Pantheon 6a P.O. Box 559 7500 AN Enschede The Netherlands phone +31 (0)88 973 67 00 fax +31 (0)88
MTi 10-series and MTi 100-series Document MT0503P, Revision 0 (DRAFT), 11 Feb 2013 Xsens Technologies B.V. Pantheon 6a P.O. Box 559 7500 AN Enschede The Netherlands phone +31 (0)88 973 67 00 fax +31 (0)88
Today I t n d ro ucti tion to computer vision Course overview Course requirements
 COMP 776: Computer Vision Today Introduction ti to computer vision i Course overview Course requirements The goal of computer vision To extract t meaning from pixels What we see What a computer sees Source:
COMP 776: Computer Vision Today Introduction ti to computer vision i Course overview Course requirements The goal of computer vision To extract t meaning from pixels What we see What a computer sees Source:
DENSO www. densocorp-na.com
 DENSO www. densocorp-na.com Machine Learning for Automated Driving Description of Project DENSO is one of the biggest tier one suppliers in the automotive industry, and one of its main goals is to provide
DENSO www. densocorp-na.com Machine Learning for Automated Driving Description of Project DENSO is one of the biggest tier one suppliers in the automotive industry, and one of its main goals is to provide
International Journal of Pharma and Bio Sciences PERFORMANCE ANALYSIS OF BONE IMAGES USING VARIOUS EDGE DETECTION ALGORITHMS AND DENOISING FILTERS
 Research Article Bioinformatics International Journal of Pharma and Bio Sciences ISSN 0975-6299 PERFORMANCE ANALYSIS OF BONE IMAGES USING VARIOUS EDGE DETECTION ALGORITHMS AND DENOISING FILTERS S.P.CHOKKALINGAM*¹,
Research Article Bioinformatics International Journal of Pharma and Bio Sciences ISSN 0975-6299 PERFORMANCE ANALYSIS OF BONE IMAGES USING VARIOUS EDGE DETECTION ALGORITHMS AND DENOISING FILTERS S.P.CHOKKALINGAM*¹,
Practical Results for Buoy-Based Automatic Maritime IR-Video Surveillance
 Automatic Maritime IR-Video Surveillance Zigmund Orlov / Wolfgang Krüger / Norbert Heinze Fraunhofer Institute of Optronics, System Technologies and Image Exploitation IOSB Fraunhoferstraße 1, 76131 Karlsruhe
Automatic Maritime IR-Video Surveillance Zigmund Orlov / Wolfgang Krüger / Norbert Heinze Fraunhofer Institute of Optronics, System Technologies and Image Exploitation IOSB Fraunhoferstraße 1, 76131 Karlsruhe
Integrated Positioning The Challenges New technology More GNSS satellites New applications Seamless indoor-outdoor More GNSS signals personal navigati
 Integrated Indoor Positioning and Navigation Professor Terry Moore Professor of Satellite Navigation Nottingham Geospatial Institute The University of Nottingham Integrated Positioning The Challenges New
Integrated Indoor Positioning and Navigation Professor Terry Moore Professor of Satellite Navigation Nottingham Geospatial Institute The University of Nottingham Integrated Positioning The Challenges New
TECHNOLOGY DEVELOPMENT AREAS IN AAWA
 TECHNOLOGY DEVELOPMENT AREAS IN AAWA Technologies for realizing remote and autonomous ships exist. The task is to find the optimum way to combine them reliably and cost effecticely. Ship state definition
TECHNOLOGY DEVELOPMENT AREAS IN AAWA Technologies for realizing remote and autonomous ships exist. The task is to find the optimum way to combine them reliably and cost effecticely. Ship state definition
Midterm Examination CS 534: Computational Photography
 Midterm Examination CS 534: Computational Photography November 3, 2015 NAME: SOLUTIONS Problem Score Max Score 1 8 2 8 3 9 4 4 5 3 6 4 7 6 8 13 9 7 10 4 11 7 12 10 13 9 14 8 Total 100 1 1. [8] What are
Midterm Examination CS 534: Computational Photography November 3, 2015 NAME: SOLUTIONS Problem Score Max Score 1 8 2 8 3 9 4 4 5 3 6 4 7 6 8 13 9 7 10 4 11 7 12 10 13 9 14 8 Total 100 1 1. [8] What are
Vision Review: Image Processing. Course web page:
 Vision Review: Image Processing Course web page: www.cis.udel.edu/~cer/arv September 7, Announcements Homework and paper presentation guidelines are up on web page Readings for next Tuesday: Chapters 6,.,
Vision Review: Image Processing Course web page: www.cis.udel.edu/~cer/arv September 7, Announcements Homework and paper presentation guidelines are up on web page Readings for next Tuesday: Chapters 6,.,
ATLANS-C. mobile mapping position and orientation solution
 mobile mapping position and orientation solution mobile mapping position and orientation solution THE SMALLEST ATLANS-C is a high performance all-in-one position and orientation solution for both land
mobile mapping position and orientation solution mobile mapping position and orientation solution THE SMALLEST ATLANS-C is a high performance all-in-one position and orientation solution for both land
Responsible Data Use Assessment for Public Realm Sensing Pilot with Numina. Overview of the Pilot:
 Responsible Data Use Assessment for Public Realm Sensing Pilot with Numina Overview of the Pilot: Sidewalk Labs vision for people-centred mobility - safer and more efficient public spaces - requires a
Responsible Data Use Assessment for Public Realm Sensing Pilot with Numina Overview of the Pilot: Sidewalk Labs vision for people-centred mobility - safer and more efficient public spaces - requires a
Carmen Alonso Montes 23rd-27th November 2015
 Practical Computer Vision: Theory & Applications calonso@bcamath.org 23rd-27th November 2015 Alternative Software Alternative software to matlab Octave Available for Linux, Mac and windows For Mac and
Practical Computer Vision: Theory & Applications calonso@bcamath.org 23rd-27th November 2015 Alternative Software Alternative software to matlab Octave Available for Linux, Mac and windows For Mac and
CIS 849: Autonomous Robot Vision
 CIS 849: Autonomous Robot Vision Instructor: Christopher Rasmussen Course web page: www.cis.udel.edu/~cer/arv September 5, 2002 Purpose of this Course To provide an introduction to the uses of visual sensing
CIS 849: Autonomous Robot Vision Instructor: Christopher Rasmussen Course web page: www.cis.udel.edu/~cer/arv September 5, 2002 Purpose of this Course To provide an introduction to the uses of visual sensing
IMAGE PROCESSING TECHNIQUES FOR CROWD DENSITY ESTIMATION USING A REFERENCE IMAGE
 Second Asian Conference on Computer Vision (ACCV9), Singapore, -8 December, Vol. III, pp. 6-1 (invited) IMAGE PROCESSING TECHNIQUES FOR CROWD DENSITY ESTIMATION USING A REFERENCE IMAGE Jia Hong Yin, Sergio
Second Asian Conference on Computer Vision (ACCV9), Singapore, -8 December, Vol. III, pp. 6-1 (invited) IMAGE PROCESSING TECHNIQUES FOR CROWD DENSITY ESTIMATION USING A REFERENCE IMAGE Jia Hong Yin, Sergio
ADAS Development using Advanced Real-Time All-in-the-Loop Simulators. Roberto De Vecchi VI-grade Enrico Busto - AddFor
 ADAS Development using Advanced Real-Time All-in-the-Loop Simulators Roberto De Vecchi VI-grade Enrico Busto - AddFor The Scenario The introduction of ADAS and AV has created completely new challenges
ADAS Development using Advanced Real-Time All-in-the-Loop Simulators Roberto De Vecchi VI-grade Enrico Busto - AddFor The Scenario The introduction of ADAS and AV has created completely new challenges
Embracing Complexity. Gavin Walker Development Manager
 Embracing Complexity Gavin Walker Development Manager 1 MATLAB and Simulink Proven Ability to Make the Complex Simpler 1970 Stanford Ph.D. thesis, with thousands of lines of Fortran code 2 MATLAB and Simulink
Embracing Complexity Gavin Walker Development Manager 1 MATLAB and Simulink Proven Ability to Make the Complex Simpler 1970 Stanford Ph.D. thesis, with thousands of lines of Fortran code 2 MATLAB and Simulink
CS686: High-level Motion/Path Planning Applications
 CS686: High-level Motion/Path Planning Applications Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa Class Objectives Discuss my general research view on motion planning Discuss
CS686: High-level Motion/Path Planning Applications Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa Class Objectives Discuss my general research view on motion planning Discuss
Intelligent Traffic Sign Detector: Adaptive Learning Based on Online Gathering of Training Samples
 2011 IEEE Intelligent Vehicles Symposium (IV) Baden-Baden, Germany, June 5-9, 2011 Intelligent Traffic Sign Detector: Adaptive Learning Based on Online Gathering of Training Samples Daisuke Deguchi, Mitsunori
2011 IEEE Intelligent Vehicles Symposium (IV) Baden-Baden, Germany, June 5-9, 2011 Intelligent Traffic Sign Detector: Adaptive Learning Based on Online Gathering of Training Samples Daisuke Deguchi, Mitsunori
Improved SIFT Matching for Image Pairs with a Scale Difference
 Improved SIFT Matching for Image Pairs with a Scale Difference Y. Bastanlar, A. Temizel and Y. Yardımcı Informatics Institute, Middle East Technical University, Ankara, 06531, Turkey Published in IET Electronics,
Improved SIFT Matching for Image Pairs with a Scale Difference Y. Bastanlar, A. Temizel and Y. Yardımcı Informatics Institute, Middle East Technical University, Ankara, 06531, Turkey Published in IET Electronics,
MATLAB 및 Simulink 를이용한운전자지원시스템개발
 MATLAB 및 Simulink 를이용한운전자지원시스템개발 김종헌차장 Senior Application Engineer MathWorks Korea 2015 The MathWorks, Inc. 1 Example : Sensor Fusion with Monocular Vision & Radar Configuration Monocular Vision installed
MATLAB 및 Simulink 를이용한운전자지원시스템개발 김종헌차장 Senior Application Engineer MathWorks Korea 2015 The MathWorks, Inc. 1 Example : Sensor Fusion with Monocular Vision & Radar Configuration Monocular Vision installed
Perception platform and fusion modules results. Angelos Amditis - ICCS and Lali Ghosh - DEL interactive final event
 Perception platform and fusion modules results Angelos Amditis - ICCS and Lali Ghosh - DEL interactive final event 20 th -21 st November 2013 Agenda Introduction Environment Perception in Intelligent Transport
Perception platform and fusion modules results Angelos Amditis - ICCS and Lali Ghosh - DEL interactive final event 20 th -21 st November 2013 Agenda Introduction Environment Perception in Intelligent Transport
The Autonomous Robots Lab. Kostas Alexis
 The Autonomous Robots Lab Kostas Alexis Who we are? Established at January 2016 Current Team: 1 Head, 1 Senior Postdoctoral Researcher, 3 PhD Candidates, 1 Graduate Research Assistant, 2 Undergraduate
The Autonomous Robots Lab Kostas Alexis Who we are? Established at January 2016 Current Team: 1 Head, 1 Senior Postdoctoral Researcher, 3 PhD Candidates, 1 Graduate Research Assistant, 2 Undergraduate
Heuristic Drift Reduction for Gyroscopes in Vehicle Tracking Applications
 White Paper Heuristic Drift Reduction for Gyroscopes in Vehicle Tracking Applications by Johann Borenstein Last revised: 12/6/27 ABSTRACT The present invention pertains to the reduction of measurement
White Paper Heuristic Drift Reduction for Gyroscopes in Vehicle Tracking Applications by Johann Borenstein Last revised: 12/6/27 ABSTRACT The present invention pertains to the reduction of measurement
Lecture: Allows operation in enviroment without prior knowledge
 Lecture: SLAM Lecture: Is it possible for an autonomous vehicle to start at an unknown environment and then to incrementally build a map of this enviroment while simulaneous using this map for vehicle
Lecture: SLAM Lecture: Is it possible for an autonomous vehicle to start at an unknown environment and then to incrementally build a map of this enviroment while simulaneous using this map for vehicle
TEST RESULTS OBTAINED WITH THE LH SYSTEMS ADS40 AIRBORNE DIGITAL SENSOR
 TEST RESULTS OBTAINED WITH THE LH SYSTEMS ADS40 AIRBORNE DIGITAL SENSOR Anko BÖRNER 1, Werner KIRCHHOFER 2, Boris MICHALEVICH 1, Ralf REULKE 1, Martin SCHEELE 1, Karsten SCHEIBE 1, Udo TEMPELMANN 2 1 Deutsches
TEST RESULTS OBTAINED WITH THE LH SYSTEMS ADS40 AIRBORNE DIGITAL SENSOR Anko BÖRNER 1, Werner KIRCHHOFER 2, Boris MICHALEVICH 1, Ralf REULKE 1, Martin SCHEELE 1, Karsten SCHEIBE 1, Udo TEMPELMANN 2 1 Deutsches
Feature Extraction Technique Based On Circular Strip for Palmprint Recognition
 Feature Extraction Technique Based On Circular Strip for Palmprint Recognition Dr.S.Valarmathy 1, R.Karthiprakash 2, C.Poonkuzhali 3 1, 2, 3 ECE Department, Bannari Amman Institute of Technology, Sathyamangalam
Feature Extraction Technique Based On Circular Strip for Palmprint Recognition Dr.S.Valarmathy 1, R.Karthiprakash 2, C.Poonkuzhali 3 1, 2, 3 ECE Department, Bannari Amman Institute of Technology, Sathyamangalam