SIGVerse - A Simulation Platform for Human-Robot Interaction Jeffrey Too Chuan TAN and Tetsunari INAMURA National Institute of Informatics, Japan The
|
|
|
- Penelope Floyd
- 5 years ago
- Views:
Transcription

1 SIGVerse - A Simulation Platform for Human-Robot Interaction Jeffrey Too Chuan TAN and Tetsunari INAMURA National Institute of Informatics, Japan The 29 th Annual Conference of The Robotics Society of Japan






2 Motivation Classical Robot Simulation Physical behaviors Multi-Agent Simulation Collective effects Webots MASON OpenHRP? SeSAm Human-Robot Interaction? 2
![The HRI Problem The HRI Problem by Goodrich and Schultz [10]: 1. Level and behavior of autonomy 2. Nature of information exchange 3. Structure of the team 4.](/docs-images/90/102017124/images/3-1.jpg "Adaptation, learning, and training of people and the robot 5. Shape of the task SIGVerse 1. General development platform to model and simulate a wide range of robot design 2.")
3 The HRI Problem The HRI Problem by Goodrich and Schultz [10]: 1. Level and behavior of autonomy 2. Nature of information exchange 3. Structure of the team 4. Adaptation, learning, and training of people and the robot 5. Shape of the task SIGVerse 1. General development platform to model and simulate a wide range of robot design 2. Communication between agents and human-robot is a main focus 3. Not just multi-agent but multi-user is targeted to simulate a whole social interaction 4. Support application based customized human-agent interface 5. Human-robot task planning and evaluation 3
![1. Robot Design [1/3] Physics](/docs-images/90/102017124/images/4-1.jpg "and Dynamics Behaviors")


4 1. Robot Design [1/3] Physics and Dynamics Behaviors Fundamental Physics and Dynamics Collision Detection Object Grasping and Manipulation Falling Behavior Object Grasping Collision Detection 4
![1. Robot Design [2/3]](/docs-images/90/102017124/images/5-2.jpg "Perception with Physical")

5 1. Robot Design [2/3] Perception with Physical Constrains Visual and Audio Hunter-Target Simulation 5


![[3/3] Link &](/docs-images/90/102017124/images/6-3.jpg "Joint Robot 6")
6 Robot Modeling Humanoid Mobile Robot 1. Robot Design [3/3] Link & Joint Humanoid Mobile Robot 6



7 2. Communication [1/2] Verbal and Non-Verbal Communication Communication by Messaging Joint Attention 7
![2. Communication [2/2] Level of Perception Data High abstract level](/docs-images/90/102017124/images/8-3.jpg "(viewpoint, objects metadata) Raw data (raw visual data in pixel map, wave")
8 2. Communication [2/2] Level of Perception Data High abstract level (viewpoint, objects metadata) Raw data (raw visual data in pixel map, wave file) 8




9 3. Multi-Agent and Multi-User SIGServer Simulation SIGViewer SIGViewer SIGViewer 9




10 4. Human-Agent Interface GUI Interface Haptic Devices Motion Capture System GUI Interface Motion Capture System Haptic Device 10





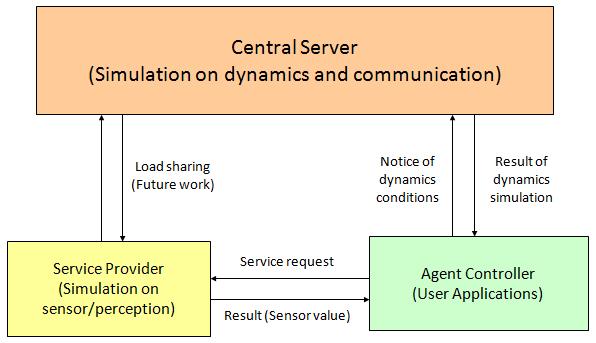
11 Task Analysis The performance of a personal robot can be studied from the task-based analysis of the human-robot interaction 5. Human-Robot Task Service function based on task Interaction Intelligence Audio and Visual Perception Behavioral Recognition and Prediction Robot Control Machine Learning Update parameters by simulation attributes Service Modeling Service modeling quantifies tasks in service terms to determine the parameters for evaluations Functional requirements tasks have direct influence to the main goal (e.g. mobility) Non-functional requirements can be derived from human factors (e.g. noise level) SIGVerse Simulation Physical Simulation Perception Simulation Communication Simulation
12 Application (1) Human-Robot Collaboration Simulation 12
")

13 Application (2) Multi-Agent Hunter-Target Simulation 13


14 Application (3) Multi Human-Agent Collaboration Simulation 14
15 Application (Summary) The HRI Problem Autonomy Information Exchange Human-Robot Collaboration Simulation Modeling of humanoid robot and human avatar Verbal communication via text message and nonverbal communication via visual perception and gesture behaviors recognition. Teams Human-robot Multi-agent Multi-Agent Hunter- Target Simulation Modeling of autonomous mobile agents Verbal communication via text message with perception physical constrains Multi Human-Agent Collaboration Simulation Modeling of autonomous and remote controlled mobile agents Verbal communication via text message with perception physical constrains Multi-agent with multi-user participation Adaptation, Learning and Training Various interfaces: GUI, haptic device and motion capture system GUI Interface GUI Interface Task-Shaping Task planning in humanrobot collaboration Multi-agent collaboration Human-agent collaboration with real time strategy 15

16 Conclusions 1. Robot Design General development platform that offers physics simulation, realistic perception and robot modeling 2. Communication Verbal and non-verbal communication with different level of perception data 3. Multi-Agent and Multi-User Social interaction that involves all multi-agent and multiuser 4. Human-Agent Interface Highly customized interface to suit application s needs 5. Human-Robot Task Application on collaboration that improve task planning and evaluation 16


17 Social interaction between human and robot Humanoid robot modeling: natural body gestures and facial expressions Agent s intelligence development: expand text based communication to include emotion expression and behavior recognition With learning methods and knowledge database development over a large group of users with the multi-agent and multi-user capability Future Work 17

18 Thank you
Introduction to Human-Robot Interaction (HRI)
") Introduction to Human-Robot Interaction (HRI) By: Anqi Xu COMP-417 Friday November 8 th, 2013 What is Human-Robot Interaction? Field of study dedicated to understanding, designing, and evaluating robotic
Introduction to Human-Robot Interaction (HRI) By: Anqi Xu COMP-417 Friday November 8 th, 2013 What is Human-Robot Interaction? Field of study dedicated to understanding, designing, and evaluating robotic
Cognitive robots and emotional intelligence Cloud robotics Ethical, legal and social issues of robotic Construction robots Human activities in many
 Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Physical Human Robot Interaction
 MIN Faculty Department of Informatics Physical Human Robot Interaction Intelligent Robotics Seminar Ilay Köksal University of Hamburg Faculty of Mathematics, Informatics and Natural Sciences Department
MIN Faculty Department of Informatics Physical Human Robot Interaction Intelligent Robotics Seminar Ilay Köksal University of Hamburg Faculty of Mathematics, Informatics and Natural Sciences Department
A SURVEY OF SOCIALLY INTERACTIVE ROBOTS
 A SURVEY OF SOCIALLY INTERACTIVE ROBOTS Terrence Fong, Illah Nourbakhsh, Kerstin Dautenhahn Presented By: Mehwish Alam INTRODUCTION History of Social Robots Social Robots Socially Interactive Robots Why
A SURVEY OF SOCIALLY INTERACTIVE ROBOTS Terrence Fong, Illah Nourbakhsh, Kerstin Dautenhahn Presented By: Mehwish Alam INTRODUCTION History of Social Robots Social Robots Socially Interactive Robots Why
Understanding the Mechanism of Sonzai-Kan
 Understanding the Mechanism of Sonzai-Kan ATR Intelligent Robotics and Communication Laboratories Where does the Sonzai-Kan, the feeling of one's presence, such as the atmosphere, the authority, come from?
Understanding the Mechanism of Sonzai-Kan ATR Intelligent Robotics and Communication Laboratories Where does the Sonzai-Kan, the feeling of one's presence, such as the atmosphere, the authority, come from?
ENHANCED HUMAN-AGENT INTERACTION: AUGMENTING INTERACTION MODELS WITH EMBODIED AGENTS BY SERAFIN BENTO. MASTER OF SCIENCE in INFORMATION SYSTEMS
 BY SERAFIN BENTO MASTER OF SCIENCE in INFORMATION SYSTEMS Edmonton, Alberta September, 2015 ABSTRACT The popularity of software agents demands for more comprehensive HAI design processes. The outcome of
BY SERAFIN BENTO MASTER OF SCIENCE in INFORMATION SYSTEMS Edmonton, Alberta September, 2015 ABSTRACT The popularity of software agents demands for more comprehensive HAI design processes. The outcome of
Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Politecnico di Milano - Dipartimento di Elettronica, Informazione e Bioingegneria Industrial robotics
Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Politecnico di Milano - Dipartimento di Elettronica, Informazione e Bioingegneria Industrial robotics
Assess how research on the construction of cognitive functions in robotic systems is undertaken in Japan, China, and Korea
 Sponsor: Assess how research on the construction of cognitive functions in robotic systems is undertaken in Japan, China, and Korea Understand the relationship between robotics and the human-centered sciences
Sponsor: Assess how research on the construction of cognitive functions in robotic systems is undertaken in Japan, China, and Korea Understand the relationship between robotics and the human-centered sciences
Telepresence Robot Care Delivery in Different Forms
 ISG 2012 World Conference Telepresence Robot Care Delivery in Different Forms Authors: Y. S. Chen, J. A. Wang, K. W. Chang, Y. J. Lin, M. C. Hsieh, Y. S. Li, J. Sebastian, C. H. Chang, Y. L. Hsu. Doctoral
ISG 2012 World Conference Telepresence Robot Care Delivery in Different Forms Authors: Y. S. Chen, J. A. Wang, K. W. Chang, Y. J. Lin, M. C. Hsieh, Y. S. Li, J. Sebastian, C. H. Chang, Y. L. Hsu. Doctoral
Introduction to Talking Robots
 Introduction to Talking Robots Graham Wilcock Adjunct Professor, Docent Emeritus University of Helsinki 20.9.2016 1 Walking and Talking Graham Wilcock 20.9.2016 2 Choregraphe Box Libraries Animations Breath,
Introduction to Talking Robots Graham Wilcock Adjunct Professor, Docent Emeritus University of Helsinki 20.9.2016 1 Walking and Talking Graham Wilcock 20.9.2016 2 Choregraphe Box Libraries Animations Breath,
Space Robotic Capabilities David Kortenkamp (NASA Johnson Space Center)
") Robotic Capabilities David Kortenkamp (NASA Johnson ) Liam Pedersen (NASA Ames) Trey Smith (Carnegie Mellon University) Illah Nourbakhsh (Carnegie Mellon University) David Wettergreen (Carnegie Mellon
Robotic Capabilities David Kortenkamp (NASA Johnson ) Liam Pedersen (NASA Ames) Trey Smith (Carnegie Mellon University) Illah Nourbakhsh (Carnegie Mellon University) David Wettergreen (Carnegie Mellon
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute State one reason for investigating and building humanoid robot (4 pts) List two
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute State one reason for investigating and building humanoid robot (4 pts) List two
Available theses in robotics (November 2017) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in robotics (November 2017) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular
Available theses in robotics (November 2017) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular
Computer Vision in Human-Computer Interaction
 Invited talk in 2010 Autumn Seminar and Meeting of Pattern Recognition Society of Finland, M/S Baltic Princess, 26.11.2010 Computer Vision in Human-Computer Interaction Matti Pietikäinen Machine Vision
Invited talk in 2010 Autumn Seminar and Meeting of Pattern Recognition Society of Finland, M/S Baltic Princess, 26.11.2010 Computer Vision in Human-Computer Interaction Matti Pietikäinen Machine Vision
Natural Interaction with Social Robots
 Workshop: Natural Interaction with Social Robots Part of the Topig Group with the same name. http://homepages.stca.herts.ac.uk/~comqkd/tg-naturalinteractionwithsocialrobots.html organized by Kerstin Dautenhahn,
Workshop: Natural Interaction with Social Robots Part of the Topig Group with the same name. http://homepages.stca.herts.ac.uk/~comqkd/tg-naturalinteractionwithsocialrobots.html organized by Kerstin Dautenhahn,
The importance and purpose of simulation in robotics
 The importance and purpose of simulation in robotics Victor I.C. Hofstede 10271791 Bachelor thesis Credits: 18 EC Bachelor Opleiding Kunstmatige Intelligentie University of Amsterdam Faculty of Science
The importance and purpose of simulation in robotics Victor I.C. Hofstede 10271791 Bachelor thesis Credits: 18 EC Bachelor Opleiding Kunstmatige Intelligentie University of Amsterdam Faculty of Science
ARMY RDT&E BUDGET ITEM JUSTIFICATION (R2 Exhibit)
") Exhibit R-2 0602308A Advanced Concepts and Simulation ARMY RDT&E BUDGET ITEM JUSTIFICATION (R2 Exhibit) FY 2005 FY 2006 FY 2007 FY 2008 FY 2009 FY 2010 FY 2011 Total Program Element (PE) Cost 22710 27416
Exhibit R-2 0602308A Advanced Concepts and Simulation ARMY RDT&E BUDGET ITEM JUSTIFICATION (R2 Exhibit) FY 2005 FY 2006 FY 2007 FY 2008 FY 2009 FY 2010 FY 2011 Total Program Element (PE) Cost 22710 27416
Autonomic gaze control of avatars using voice information in virtual space voice chat system
 Autonomic gaze control of avatars using voice information in virtual space voice chat system Kinya Fujita, Toshimitsu Miyajima and Takashi Shimoji Tokyo University of Agriculture and Technology 2-24-16
Autonomic gaze control of avatars using voice information in virtual space voice chat system Kinya Fujita, Toshimitsu Miyajima and Takashi Shimoji Tokyo University of Agriculture and Technology 2-24-16
Towards Intuitive Industrial Human-Robot Collaboration
 Towards Intuitive Industrial Human-Robot Collaboration System Design and Future Directions Ferdinand Fuhrmann, Wolfgang Weiß, Lucas Paletta, Bernhard Reiterer, Andreas Schlotzhauer, Mathias Brandstötter
Towards Intuitive Industrial Human-Robot Collaboration System Design and Future Directions Ferdinand Fuhrmann, Wolfgang Weiß, Lucas Paletta, Bernhard Reiterer, Andreas Schlotzhauer, Mathias Brandstötter
ROBO-PARTNER: Safe human-robot collaboration for assembly: case studies and challenges
 ROBO-PARTNER: Safe human-robot collaboration for assembly: case studies and challenges Dr. George Michalos University of Patras ROBOT FORUM ASSEMBLY 16 March 2016 Parma, Italy Introduction Human sensitivity
ROBO-PARTNER: Safe human-robot collaboration for assembly: case studies and challenges Dr. George Michalos University of Patras ROBOT FORUM ASSEMBLY 16 March 2016 Parma, Italy Introduction Human sensitivity
SECOND YEAR PROJECT SUMMARY
 SECOND YEAR PROJECT SUMMARY Grant Agreement number: 215805 Project acronym: Project title: CHRIS Cooperative Human Robot Interaction Systems Period covered: from 01 March 2009 to 28 Feb 2010 Contact Details
SECOND YEAR PROJECT SUMMARY Grant Agreement number: 215805 Project acronym: Project title: CHRIS Cooperative Human Robot Interaction Systems Period covered: from 01 March 2009 to 28 Feb 2010 Contact Details
Building Perceptive Robots with INTEL Euclid Development kit
 Building Perceptive Robots with INTEL Euclid Development kit Amit Moran Perceptual Computing Systems Innovation 2 2 3 A modern robot should Perform a task Find its way in our world and move safely Understand
Building Perceptive Robots with INTEL Euclid Development kit Amit Moran Perceptual Computing Systems Innovation 2 2 3 A modern robot should Perform a task Find its way in our world and move safely Understand
Push Path Improvement with Policy based Reinforcement Learning
 1 Push Path Improvement with Policy based Reinforcement Learning Junhu He TAMS Department of Informatics University of Hamburg Cross-modal Interaction In Natural and Artificial Cognitive Systems (CINACS)
1 Push Path Improvement with Policy based Reinforcement Learning Junhu He TAMS Department of Informatics University of Hamburg Cross-modal Interaction In Natural and Artificial Cognitive Systems (CINACS)
Human Robotics Interaction (HRI) based Analysis using DMT
 based Analysis using DMT") Human Robotics Interaction (HRI) based Analysis using DMT Rimmy Chuchra 1 and R. K. Seth 2 1 Department of Computer Science and Engineering Sri Sai College of Engineering and Technology, Manawala, Amritsar
Human Robotics Interaction (HRI) based Analysis using DMT Rimmy Chuchra 1 and R. K. Seth 2 1 Department of Computer Science and Engineering Sri Sai College of Engineering and Technology, Manawala, Amritsar
Human Robot Interaction (HRI)
") Brief Introduction to HRI Batu Akan batu.akan@mdh.se Mälardalen Högskola September 29, 2008 Overview 1 Introduction What are robots What is HRI Application areas of HRI 2 3 Motivations Proposed Solution
Brief Introduction to HRI Batu Akan batu.akan@mdh.se Mälardalen Högskola September 29, 2008 Overview 1 Introduction What are robots What is HRI Application areas of HRI 2 3 Motivations Proposed Solution
Advanced Robotics Introduction
 Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
Intent Expression Using Eye Robot for Mascot Robot System
 Intent Expression Using Eye Robot for Mascot Robot System Yoichi Yamazaki, Fangyan Dong, Yuta Masuda, Yukiko Uehara, Petar Kormushev, Hai An Vu, Phuc Quang Le, and Kaoru Hirota Department of Computational
Intent Expression Using Eye Robot for Mascot Robot System Yoichi Yamazaki, Fangyan Dong, Yuta Masuda, Yukiko Uehara, Petar Kormushev, Hai An Vu, Phuc Quang Le, and Kaoru Hirota Department of Computational
HRP-2W: A Humanoid Platform for Research on Support Behavior in Daily life Environments
 Book Title Book Editors IOS Press, 2003 1 HRP-2W: A Humanoid Platform for Research on Support Behavior in Daily life Environments Tetsunari Inamura a,1, Masayuki Inaba a and Hirochika Inoue a a Dept. of
Book Title Book Editors IOS Press, 2003 1 HRP-2W: A Humanoid Platform for Research on Support Behavior in Daily life Environments Tetsunari Inamura a,1, Masayuki Inaba a and Hirochika Inoue a a Dept. of
HUMAN-ROBOT COLLABORATION TNO, THE NETHERLANDS. 6 th SAF RA Symposium Sustainable Safety 2030 June 14, 2018 Mr. Johan van Middelaar
 HUMAN-ROBOT COLLABORATION TNO, THE NETHERLANDS 6 th SAF RA Symposium Sustainable Safety 2030 June 14, 2018 Mr. Johan van Middelaar CONTENTS TNO & Robotics Robots and workplace safety: Human-Robot Collaboration,
HUMAN-ROBOT COLLABORATION TNO, THE NETHERLANDS 6 th SAF RA Symposium Sustainable Safety 2030 June 14, 2018 Mr. Johan van Middelaar CONTENTS TNO & Robotics Robots and workplace safety: Human-Robot Collaboration,
Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular fatigue
Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular fatigue
Contents. Part I: Images. List of contributing authors XIII Preface 1
 Contents List of contributing authors XIII Preface 1 Part I: Images Steve Mushkin My robot 5 I Introduction 5 II Generative-research methodology 6 III What children want from technology 6 A Methodology
Contents List of contributing authors XIII Preface 1 Part I: Images Steve Mushkin My robot 5 I Introduction 5 II Generative-research methodology 6 III What children want from technology 6 A Methodology
VIRTUAL REALITY Introduction. Emil M. Petriu SITE, University of Ottawa
 VIRTUAL REALITY Introduction Emil M. Petriu SITE, University of Ottawa Natural and Virtual Reality Virtual Reality Interactive Virtual Reality Virtualized Reality Augmented Reality HUMAN PERCEPTION OF
VIRTUAL REALITY Introduction Emil M. Petriu SITE, University of Ottawa Natural and Virtual Reality Virtual Reality Interactive Virtual Reality Virtualized Reality Augmented Reality HUMAN PERCEPTION OF
The DLR On-Orbit Servicing Testbed
 The DLR On-Orbit Servicing Testbed J. Artigas, R. Lampariello, B. Brunner, M. Stelzer, C. Borst, K. Landzettel, G. Hirzinger, A. Albu-Schäffer Robotics and Mechatronics Center, DLR VR-OOS Workshop 2012
The DLR On-Orbit Servicing Testbed J. Artigas, R. Lampariello, B. Brunner, M. Stelzer, C. Borst, K. Landzettel, G. Hirzinger, A. Albu-Schäffer Robotics and Mechatronics Center, DLR VR-OOS Workshop 2012
Design and evaluation of a telepresence robot for interpersonal communication with older adults
 Authors: Yi-Shin Chen, Jun-Ming Lu, Yeh-Liang Hsu (2013-05-03); recommended: Yeh-Liang Hsu (2014-09-09). Note: This paper was presented in The 11th International Conference on Smart Homes and Health Telematics
Authors: Yi-Shin Chen, Jun-Ming Lu, Yeh-Liang Hsu (2013-05-03); recommended: Yeh-Liang Hsu (2014-09-09). Note: This paper was presented in The 11th International Conference on Smart Homes and Health Telematics
Affordance based Human Motion Synthesizing System
 Affordance based Human Motion Synthesizing System H. Ishii, N. Ichiguchi, D. Komaki, H. Shimoda and H. Yoshikawa Graduate School of Energy Science Kyoto University Uji-shi, Kyoto, 611-0011, Japan Abstract
Affordance based Human Motion Synthesizing System H. Ishii, N. Ichiguchi, D. Komaki, H. Shimoda and H. Yoshikawa Graduate School of Energy Science Kyoto University Uji-shi, Kyoto, 611-0011, Japan Abstract
Benchmarking Intelligent Service Robots through Scientific Competitions: the approach. Luca Iocchi. Sapienza University of Rome, Italy
 Benchmarking Intelligent Service Robots through Scientific Competitions: the RoboCup@Home approach Luca Iocchi Sapienza University of Rome, Italy Motivation Benchmarking Domestic Service Robots Complex
Benchmarking Intelligent Service Robots through Scientific Competitions: the RoboCup@Home approach Luca Iocchi Sapienza University of Rome, Italy Motivation Benchmarking Domestic Service Robots Complex
UvA Rescue Team Description Paper Infrastructure competition Rescue Simulation League RoboCup Jo~ao Pessoa - Brazil
 UvA Rescue Team Description Paper Infrastructure competition Rescue Simulation League RoboCup 2014 - Jo~ao Pessoa - Brazil Arnoud Visser Universiteit van Amsterdam, Science Park 904, 1098 XH Amsterdam,
UvA Rescue Team Description Paper Infrastructure competition Rescue Simulation League RoboCup 2014 - Jo~ao Pessoa - Brazil Arnoud Visser Universiteit van Amsterdam, Science Park 904, 1098 XH Amsterdam,
An Agent-Based Architecture for an Adaptive Human-Robot Interface
 An Agent-Based Architecture for an Adaptive Human-Robot Interface Kazuhiko Kawamura, Phongchai Nilas, Kazuhiko Muguruma, Julie A. Adams, and Chen Zhou Center for Intelligent Systems Vanderbilt University
An Agent-Based Architecture for an Adaptive Human-Robot Interface Kazuhiko Kawamura, Phongchai Nilas, Kazuhiko Muguruma, Julie A. Adams, and Chen Zhou Center for Intelligent Systems Vanderbilt University
Performance evaluation and benchmarking in EU-funded activities. ICRA May 2011
 Performance evaluation and benchmarking in EU-funded activities ICRA 2011 13 May 2011 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media European
Performance evaluation and benchmarking in EU-funded activities ICRA 2011 13 May 2011 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media European
Humanoid Robotics (TIF 160)
") Humanoid Robotics (TIF 160) Lecture 1, 20090901 Introduction and motivation to humanoid robotics What will you learn? (Aims) Basic facts about humanoid robots Kinematics (and dynamics) of humanoid robots
Humanoid Robotics (TIF 160) Lecture 1, 20090901 Introduction and motivation to humanoid robotics What will you learn? (Aims) Basic facts about humanoid robots Kinematics (and dynamics) of humanoid robots
Human-Robot Interaction. Aaron Steinfeld Robotics Institute Carnegie Mellon University
 Human-Robot Interaction Aaron Steinfeld Robotics Institute Carnegie Mellon University Human-Robot Interface Sandstorm, www.redteamracing.org Typical Questions: Why is field robotics hard? Why isn t machine
Human-Robot Interaction Aaron Steinfeld Robotics Institute Carnegie Mellon University Human-Robot Interface Sandstorm, www.redteamracing.org Typical Questions: Why is field robotics hard? Why isn t machine
Definitions and Application Areas
 Definitions and Application Areas Ambient intelligence: technology and design Fulvio Corno Politecnico di Torino, 2013/2014 http://praxis.cs.usyd.edu.au/~peterris Summary Definition(s) Application areas
Definitions and Application Areas Ambient intelligence: technology and design Fulvio Corno Politecnico di Torino, 2013/2014 http://praxis.cs.usyd.edu.au/~peterris Summary Definition(s) Application areas
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
Advanced Robotics Introduction
 Advanced Robotics Introduction Institute for Software Technology 1 Agenda Motivation Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 Bridge the Gap Mobile
Advanced Robotics Introduction Institute for Software Technology 1 Agenda Motivation Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 Bridge the Gap Mobile
Humanoid Robotics (TIF 160)
") Humanoid Robotics (TIF 160) Lecture 1, 20100831 Introduction and motivation to humanoid robotics What will you learn? (Aims) Basic facts about humanoid robots Kinematics (and dynamics) of humanoid robots
Humanoid Robotics (TIF 160) Lecture 1, 20100831 Introduction and motivation to humanoid robotics What will you learn? (Aims) Basic facts about humanoid robots Kinematics (and dynamics) of humanoid robots
Human Robot Dialogue Interaction. Barry Lumpkin
 Human Robot Dialogue Interaction Barry Lumpkin Robots Where to Look: A Study of Human- Robot Engagement Why embodiment? Pure vocal and virtual agents can hold a dialogue Physical robots come with many
Human Robot Dialogue Interaction Barry Lumpkin Robots Where to Look: A Study of Human- Robot Engagement Why embodiment? Pure vocal and virtual agents can hold a dialogue Physical robots come with many
U ROBOT March 12, 2008 Kyung Chul Shin Yujin Robot Co.
 U ROBOT March 12, 2008 Kyung Chul Shin Yujin Robot Co. Is the era of the robot around the corner? It is coming slowly albeit steadily hundred million 1600 1400 1200 1000 Public Service Educational Service
U ROBOT March 12, 2008 Kyung Chul Shin Yujin Robot Co. Is the era of the robot around the corner? It is coming slowly albeit steadily hundred million 1600 1400 1200 1000 Public Service Educational Service
Remote Supervision of Autonomous Humanoid Robots for Complex Disaster Recovery Tasks
 Remote Supervision of Autonomous Humanoid Robots for Complex Disaster Recovery Tasks Stefan Kohlbrecher, TU Darmstadt Joint work with Alberto Romay, Alexander Stumpf, Oskar von Stryk Simulation, Systems
Remote Supervision of Autonomous Humanoid Robots for Complex Disaster Recovery Tasks Stefan Kohlbrecher, TU Darmstadt Joint work with Alberto Romay, Alexander Stumpf, Oskar von Stryk Simulation, Systems
Virtual Environments. Ruth Aylett
 Virtual Environments Ruth Aylett Aims of the course 1. To demonstrate a critical understanding of modern VE systems, evaluating the strengths and weaknesses of the current VR technologies 2. To be able
Virtual Environments Ruth Aylett Aims of the course 1. To demonstrate a critical understanding of modern VE systems, evaluating the strengths and weaknesses of the current VR technologies 2. To be able
Interactive Virtual Environments
 Interactive Virtual Environments Introduction Emil M. Petriu, Dr. Eng., FIEEE Professor, School of Information Technology and Engineering University of Ottawa, Ottawa, ON, Canada http://www.site.uottawa.ca/~petriu
Interactive Virtual Environments Introduction Emil M. Petriu, Dr. Eng., FIEEE Professor, School of Information Technology and Engineering University of Ottawa, Ottawa, ON, Canada http://www.site.uottawa.ca/~petriu
A Responsive Vision System to Support Human-Robot Interaction
 A Responsive Vision System to Support Human-Robot Interaction Bruce A. Maxwell, Brian M. Leighton, and Leah R. Perlmutter Colby College {bmaxwell, bmleight, lrperlmu}@colby.edu Abstract Humanoid robots
A Responsive Vision System to Support Human-Robot Interaction Bruce A. Maxwell, Brian M. Leighton, and Leah R. Perlmutter Colby College {bmaxwell, bmleight, lrperlmu}@colby.edu Abstract Humanoid robots
REALIZATION OF TAI-CHI MOTION USING A HUMANOID ROBOT Physical interactions with humanoid robot
 REALIZATION OF TAI-CHI MOTION USING A HUMANOID ROBOT Physical interactions with humanoid robot Takenori Wama 1, Masayuki Higuchi 1, Hajime Sakamoto 2, Ryohei Nakatsu 1 1 Kwansei Gakuin University, School
REALIZATION OF TAI-CHI MOTION USING A HUMANOID ROBOT Physical interactions with humanoid robot Takenori Wama 1, Masayuki Higuchi 1, Hajime Sakamoto 2, Ryohei Nakatsu 1 1 Kwansei Gakuin University, School
Cognitive Robotics 2017/2018
 Cognitive Robotics 2017/2018 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Cognitive Robotics 2017/2018 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Human-robotic cooperation In the light of Industry 4.0
 Human-robotic cooperation In the light of Industry 4.0 Central European cooperation for Industry 4.0 workshop Dr. Erdős Ferenc Gábor Engineering and Management Intelligence Laboratoty (EMI) Institute for
Human-robotic cooperation In the light of Industry 4.0 Central European cooperation for Industry 4.0 workshop Dr. Erdős Ferenc Gábor Engineering and Management Intelligence Laboratoty (EMI) Institute for
MIN-Fakultät Fachbereich Informatik. Universität Hamburg. Socially interactive robots. Christine Upadek. 29 November Christine Upadek 1
 Christine Upadek 29 November 2010 Christine Upadek 1 Outline Emotions Kismet - a sociable robot Outlook Christine Upadek 2 Denition Social robots are embodied agents that are part of a heterogeneous group:
Christine Upadek 29 November 2010 Christine Upadek 1 Outline Emotions Kismet - a sociable robot Outlook Christine Upadek 2 Denition Social robots are embodied agents that are part of a heterogeneous group:
Virtual Operator in Virtual Control Room: The Prototype System Implementation
 Virtual Operator in Virtual Control Room: The Prototype System Implementation H.Shimoda*, H.Ishii*, W.Wu*, D.Li*, T. Nakagawa**, H.Yoshikawa* *Graduate School of Energy Science, Kyoto University Gokasho,
Virtual Operator in Virtual Control Room: The Prototype System Implementation H.Shimoda*, H.Ishii*, W.Wu*, D.Li*, T. Nakagawa**, H.Yoshikawa* *Graduate School of Energy Science, Kyoto University Gokasho,
CORC 3303 Exploring Robotics. Why Teams?
 Exploring Robotics Lecture F Robot Teams Topics: 1) Teamwork and Its Challenges 2) Coordination, Communication and Control 3) RoboCup Why Teams? It takes two (or more) Such as cooperative transportation:
Exploring Robotics Lecture F Robot Teams Topics: 1) Teamwork and Its Challenges 2) Coordination, Communication and Control 3) RoboCup Why Teams? It takes two (or more) Such as cooperative transportation:
Interaction rule learning with a human partner based on an imitation faculty with a simple visuo-motor mapping
 Robotics and Autonomous Systems 54 (2006) 414 418 www.elsevier.com/locate/robot Interaction rule learning with a human partner based on an imitation faculty with a simple visuo-motor mapping Masaki Ogino
Robotics and Autonomous Systems 54 (2006) 414 418 www.elsevier.com/locate/robot Interaction rule learning with a human partner based on an imitation faculty with a simple visuo-motor mapping Masaki Ogino
Knowledge Representation and Cognition in Natural Language Processing
 Knowledge Representation and Cognition in Natural Language Processing Gemignani Guglielmo Sapienza University of Rome January 17 th 2013 The European Projects Surveyed the FP6 and FP7 projects involving
Knowledge Representation and Cognition in Natural Language Processing Gemignani Guglielmo Sapienza University of Rome January 17 th 2013 The European Projects Surveyed the FP6 and FP7 projects involving
Topic Paper HRI Theory and Evaluation
 Topic Paper HRI Theory and Evaluation Sree Ram Akula (sreerama@mtu.edu) Abstract: Human-robot interaction(hri) is the study of interactions between humans and robots. HRI Theory and evaluation deals with
Topic Paper HRI Theory and Evaluation Sree Ram Akula (sreerama@mtu.edu) Abstract: Human-robot interaction(hri) is the study of interactions between humans and robots. HRI Theory and evaluation deals with
Intent Imitation using Wearable Motion Capturing System with On-line Teaching of Task Attention
 Intent Imitation using Wearable Motion Capturing System with On-line Teaching of Task Attention Tetsunari Inamura, Naoki Kojo, Tomoyuki Sonoda, Kazuyuki Sakamoto, Kei Okada and Masayuki Inaba Department
Intent Imitation using Wearable Motion Capturing System with On-line Teaching of Task Attention Tetsunari Inamura, Naoki Kojo, Tomoyuki Sonoda, Kazuyuki Sakamoto, Kei Okada and Masayuki Inaba Department
Evaluating Fluency in Human-Robot Collaboration
 Evaluating Fluency in Human-Robot Collaboration Guy Hoffman Media Innovation Lab, IDC Herzliya P.O. Box 167, Herzliya 46150, Israel Email: hoffman@idc.ac.il Abstract Collaborative fluency is the coordinated
Evaluating Fluency in Human-Robot Collaboration Guy Hoffman Media Innovation Lab, IDC Herzliya P.O. Box 167, Herzliya 46150, Israel Email: hoffman@idc.ac.il Abstract Collaborative fluency is the coordinated
Perception. Read: AIMA Chapter 24 & Chapter HW#8 due today. Vision
 11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
Robotic Systems ECE 401RB Fall 2007
 The following notes are from: Robotic Systems ECE 401RB Fall 2007 Lecture 14: Cooperation among Multiple Robots Part 2 Chapter 12, George A. Bekey, Autonomous Robots: From Biological Inspiration to Implementation
The following notes are from: Robotic Systems ECE 401RB Fall 2007 Lecture 14: Cooperation among Multiple Robots Part 2 Chapter 12, George A. Bekey, Autonomous Robots: From Biological Inspiration to Implementation
Learning the Proprioceptive and Acoustic Properties of Household Objects. Jivko Sinapov Willow Collaborators: Kaijen and Radu 6/24/2010
 Learning the Proprioceptive and Acoustic Properties of Household Objects Jivko Sinapov Willow Collaborators: Kaijen and Radu 6/24/2010 What is Proprioception? It is the sense that indicates whether the
Learning the Proprioceptive and Acoustic Properties of Household Objects Jivko Sinapov Willow Collaborators: Kaijen and Radu 6/24/2010 What is Proprioception? It is the sense that indicates whether the
Prof. Subramanian Ramamoorthy. The University of Edinburgh, Reader at the School of Informatics
 Prof. Subramanian Ramamoorthy The University of Edinburgh, Reader at the School of Informatics with Baxter there is a good simulator, a physical robot and easy to access public libraries means it s relatively
Prof. Subramanian Ramamoorthy The University of Edinburgh, Reader at the School of Informatics with Baxter there is a good simulator, a physical robot and easy to access public libraries means it s relatively
Implementing Physical Capabilities for an Existing Chatbot by Using a Repurposed Animatronic to Synchronize Motor Positioning with Speech
 Implementing Physical Capabilities for an Existing Chatbot by Using a Repurposed Animatronic to Synchronize Motor Positioning with Speech Alex Johnson, Tyler Roush, Mitchell Fulton, Anthony Reese Kent
Implementing Physical Capabilities for an Existing Chatbot by Using a Repurposed Animatronic to Synchronize Motor Positioning with Speech Alex Johnson, Tyler Roush, Mitchell Fulton, Anthony Reese Kent
Associated Emotion and its Expression in an Entertainment Robot QRIO
 Associated Emotion and its Expression in an Entertainment Robot QRIO Fumihide Tanaka 1. Kuniaki Noda 1. Tsutomu Sawada 2. Masahiro Fujita 1.2. 1. Life Dynamics Laboratory Preparatory Office, Sony Corporation,
Associated Emotion and its Expression in an Entertainment Robot QRIO Fumihide Tanaka 1. Kuniaki Noda 1. Tsutomu Sawada 2. Masahiro Fujita 1.2. 1. Life Dynamics Laboratory Preparatory Office, Sony Corporation,
AN AUTONOMOUS SIMULATION BASED SYSTEM FOR ROBOTIC SERVICES IN PARTIALLY KNOWN ENVIRONMENTS
 AN AUTONOMOUS SIMULATION BASED SYSTEM FOR ROBOTIC SERVICES IN PARTIALLY KNOWN ENVIRONMENTS Eva Cipi, PhD in Computer Engineering University of Vlora, Albania Abstract This paper is focused on presenting
AN AUTONOMOUS SIMULATION BASED SYSTEM FOR ROBOTIC SERVICES IN PARTIALLY KNOWN ENVIRONMENTS Eva Cipi, PhD in Computer Engineering University of Vlora, Albania Abstract This paper is focused on presenting
Overview Agents, environments, typical components
 Overview Agents, environments, typical components CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami January 23, 2017 Outline 1 Autonomous robots 2 Agents
Overview Agents, environments, typical components CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami January 23, 2017 Outline 1 Autonomous robots 2 Agents
Cognitive Systems Monographs
 Cognitive Systems Monographs Volume 9 Editors: Rüdiger Dillmann Yoshihiko Nakamura Stefan Schaal David Vernon Heiko Hamann Space-Time Continuous Models of Swarm Robotic Systems Supporting Global-to-Local
Cognitive Systems Monographs Volume 9 Editors: Rüdiger Dillmann Yoshihiko Nakamura Stefan Schaal David Vernon Heiko Hamann Space-Time Continuous Models of Swarm Robotic Systems Supporting Global-to-Local
Children and Social Robots: An integrative framework
 Children and Social Robots: An integrative framework Jochen Peter Amsterdam School of Communication Research University of Amsterdam (Funded by ERC Grant 682733, CHILDROBOT) Prague, November 2016 Prague,
Children and Social Robots: An integrative framework Jochen Peter Amsterdam School of Communication Research University of Amsterdam (Funded by ERC Grant 682733, CHILDROBOT) Prague, November 2016 Prague,
Essay on A Survey of Socially Interactive Robots Authors: Terrence Fong, Illah Nourbakhsh, Kerstin Dautenhahn Summarized by: Mehwish Alam
 1 Introduction Essay on A Survey of Socially Interactive Robots Authors: Terrence Fong, Illah Nourbakhsh, Kerstin Dautenhahn Summarized by: Mehwish Alam 1.1 Social Robots: Definition: Social robots are
1 Introduction Essay on A Survey of Socially Interactive Robots Authors: Terrence Fong, Illah Nourbakhsh, Kerstin Dautenhahn Summarized by: Mehwish Alam 1.1 Social Robots: Definition: Social robots are
REBO: A LIFE-LIKE UNIVERSAL REMOTE CONTROL
 World Automation Congress 2010 TSI Press. REBO: A LIFE-LIKE UNIVERSAL REMOTE CONTROL SEIJI YAMADA *1 AND KAZUKI KOBAYASHI *2 *1 National Institute of Informatics / The Graduate University for Advanced
World Automation Congress 2010 TSI Press. REBO: A LIFE-LIKE UNIVERSAL REMOTE CONTROL SEIJI YAMADA *1 AND KAZUKI KOBAYASHI *2 *1 National Institute of Informatics / The Graduate University for Advanced
Personalized short-term multi-modal interaction for social robots assisting users in shopping malls
 Personalized short-term multi-modal interaction for social robots assisting users in shopping malls Luca Iocchi 1, Maria Teresa Lázaro 1, Laurent Jeanpierre 2, Abdel-Illah Mouaddib 2 1 Dept. of Computer,
Personalized short-term multi-modal interaction for social robots assisting users in shopping malls Luca Iocchi 1, Maria Teresa Lázaro 1, Laurent Jeanpierre 2, Abdel-Illah Mouaddib 2 1 Dept. of Computer,
Graz University of Technology (Austria)
") Graz University of Technology (Austria) I am in charge of the Vision Based Measurement Group at Graz University of Technology. The research group is focused on two main areas: Object Category Recognition
Graz University of Technology (Austria) I am in charge of the Vision Based Measurement Group at Graz University of Technology. The research group is focused on two main areas: Object Category Recognition
Cognitive Robotics 2016/2017
 Cognitive Robotics 2016/2017 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Cognitive Robotics 2016/2017 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Future Intelligent Machines
 Future Intelligent Machines TKK GIM research institute Content of the talk Introductory remarks Intelligent machines Subsystems technology and modularity Robots and biology Robots in homes Introductory
Future Intelligent Machines TKK GIM research institute Content of the talk Introductory remarks Intelligent machines Subsystems technology and modularity Robots and biology Robots in homes Introductory
FP7 ICT Call 6: Cognitive Systems and Robotics
 FP7 ICT Call 6: Cognitive Systems and Robotics Information day Luxembourg, January 14, 2010 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media
FP7 ICT Call 6: Cognitive Systems and Robotics Information day Luxembourg, January 14, 2010 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media
Towards Complex Human Robot Cooperation Based on Gesture-Controlled Autonomous Navigation
 CHAPTER 1 Towards Complex Human Robot Cooperation Based on Gesture-Controlled Autonomous Navigation J. DE LEÓN 1 and M. A. GARZÓN 1 and D. A. GARZÓN 1 and J. DEL CERRO 1 and A. BARRIENTOS 1 1 Centro de
CHAPTER 1 Towards Complex Human Robot Cooperation Based on Gesture-Controlled Autonomous Navigation J. DE LEÓN 1 and M. A. GARZÓN 1 and D. A. GARZÓN 1 and J. DEL CERRO 1 and A. BARRIENTOS 1 1 Centro de
Intelligent Robotic Systems. What is a Robot? Is This a Robot? Prof. Richard Voyles Department of Computer Engineering University of Denver
 Intelligent Robotic Systems Prof. Richard Voyles Department of Computer Engineering University of Denver ENCE 3830/4800 What is a Robot? WWWebsters: a mechanism guided by automatic controls a device that
Intelligent Robotic Systems Prof. Richard Voyles Department of Computer Engineering University of Denver ENCE 3830/4800 What is a Robot? WWWebsters: a mechanism guided by automatic controls a device that
Humanoids. Lecture Outline. RSS 2010 Lecture # 19 Una-May O Reilly. Definition and motivation. Locomotion. Why humanoids? What are humanoids?
 Humanoids RSS 2010 Lecture # 19 Una-May O Reilly Lecture Outline Definition and motivation Why humanoids? What are humanoids? Examples Locomotion RSS 2010 Humanoids Lecture 1 1 Why humanoids? Capek, Paris
Humanoids RSS 2010 Lecture # 19 Una-May O Reilly Lecture Outline Definition and motivation Why humanoids? What are humanoids? Examples Locomotion RSS 2010 Humanoids Lecture 1 1 Why humanoids? Capek, Paris
From Human-Computer Interaction to Human-Robot Social Interaction
 www.ijcsi.org 231 From Human-Computer Interaction to Human-Robot Social Interaction Tarek Toumi and Abdelmadjid Zidani LaSTIC Laboratory, Computer Science Department University of Batna, 05000 Algeria
www.ijcsi.org 231 From Human-Computer Interaction to Human-Robot Social Interaction Tarek Toumi and Abdelmadjid Zidani LaSTIC Laboratory, Computer Science Department University of Batna, 05000 Algeria
Agent Models of 3D Virtual Worlds
 Agent Models of 3D Virtual Worlds Abstract P_130 Architectural design has relevance to the design of virtual worlds that create a sense of place through the metaphor of buildings, rooms, and inhabitable
Agent Models of 3D Virtual Worlds Abstract P_130 Architectural design has relevance to the design of virtual worlds that create a sense of place through the metaphor of buildings, rooms, and inhabitable
Public Displays of Affect: Deploying Relational Agents in Public Spaces
 Public Displays of Affect: Deploying Relational Agents in Public Spaces Timothy Bickmore Laura Pfeifer Daniel Schulman Sepalika Perera Chaamari Senanayake Ishraque Nazmi Northeastern University College
Public Displays of Affect: Deploying Relational Agents in Public Spaces Timothy Bickmore Laura Pfeifer Daniel Schulman Sepalika Perera Chaamari Senanayake Ishraque Nazmi Northeastern University College
THE HRI EXPERIMENT FRAMEWORK FOR DESIGNERS
 THE HRI EXPERIMENT FRAMEWORK FOR DESIGNERS Kwangmyung Oh¹ and Myungsuk Kim¹ ¹Dept. of Industrial Design, N8, KAIST, Daejeon, Republic of Korea, urigella, mskim@kaist.ac.kr ABSTRACT: In the robot development,
THE HRI EXPERIMENT FRAMEWORK FOR DESIGNERS Kwangmyung Oh¹ and Myungsuk Kim¹ ¹Dept. of Industrial Design, N8, KAIST, Daejeon, Republic of Korea, urigella, mskim@kaist.ac.kr ABSTRACT: In the robot development,
CAPACITIES FOR TECHNOLOGY TRANSFER
 CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
When in Rome: The Role of Culture & Context in Adherence to Robot Recommendations
 When in Rome: The Role of Culture & Context in Adherence to Robot Recommendations Lin Wang & Pei- Luen (Patrick) Rau Benjamin Robinson & Pamela Hinds Vanessa Evers Funded by grants from the Specialized
When in Rome: The Role of Culture & Context in Adherence to Robot Recommendations Lin Wang & Pei- Luen (Patrick) Rau Benjamin Robinson & Pamela Hinds Vanessa Evers Funded by grants from the Specialized
Sensor-based robot control for Physical-Human Robot Interaction. IDH Interactive Digital Humans
 Sensor-based robot control for Physical-Human Robot Interaction IDH Interactive Digital Humans Robotics Department DEXTER - Design, control, handling - Parallel and medical robotics DEMAR - Modeling and
Sensor-based robot control for Physical-Human Robot Interaction IDH Interactive Digital Humans Robotics Department DEXTER - Design, control, handling - Parallel and medical robotics DEMAR - Modeling and
Human-Robot Collaborative Dance
 Human-Robot Collaborative Dance Nikhil Baheti, Kim Baraka, Paul Calhoun, and Letian Zhang Mentor: Prof. Manuela Veloso 16-662: Robot autonomy Final project presentation April 27, 2016 Motivation - Work
Human-Robot Collaborative Dance Nikhil Baheti, Kim Baraka, Paul Calhoun, and Letian Zhang Mentor: Prof. Manuela Veloso 16-662: Robot autonomy Final project presentation April 27, 2016 Motivation - Work
Human-Bandwidth and the Design of Internet2 Interfaces: Human Factors and Psychosocial Challenge
 Human-Bandwidth and the Design of Internet2 Interfaces: Human Factors and Psychosocial Challenge Frank Biocca Ameritech Professor of Telecommunication Director, M.I.N.D. Labs Michigan State University
Human-Bandwidth and the Design of Internet2 Interfaces: Human Factors and Psychosocial Challenge Frank Biocca Ameritech Professor of Telecommunication Director, M.I.N.D. Labs Michigan State University
ACE: A Platform for the Real Time Simulation of Virtual Human Agents
 ACE: A Platform for the Real Time Simulation of Virtual Human Agents Marcelo Kallmann, Jean-Sébastien Monzani, Angela Caicedo and Daniel Thalmann EPFL Computer Graphics Lab LIG CH-1015 Lausanne Switzerland
ACE: A Platform for the Real Time Simulation of Virtual Human Agents Marcelo Kallmann, Jean-Sébastien Monzani, Angela Caicedo and Daniel Thalmann EPFL Computer Graphics Lab LIG CH-1015 Lausanne Switzerland
Lecture 23: Robotics. Instructor: Joelle Pineau Class web page: What is a robot?
 COMP 102: Computers and Computing Lecture 23: Robotics Instructor: (jpineau@cs.mcgill.ca) Class web page: www.cs.mcgill.ca/~jpineau/comp102 What is a robot? The word robot is popularized by the Czech playwright
COMP 102: Computers and Computing Lecture 23: Robotics Instructor: (jpineau@cs.mcgill.ca) Class web page: www.cs.mcgill.ca/~jpineau/comp102 What is a robot? The word robot is popularized by the Czech playwright
A*STAR Unveils Singapore s First Social Robots at Robocup2010
 MEDIA RELEASE Singapore, 21 June 2010 Total: 6 pages A*STAR Unveils Singapore s First Social Robots at Robocup2010 Visit Suntec City to experience the first social robots - OLIVIA and LUCAS that can see,
MEDIA RELEASE Singapore, 21 June 2010 Total: 6 pages A*STAR Unveils Singapore s First Social Robots at Robocup2010 Visit Suntec City to experience the first social robots - OLIVIA and LUCAS that can see,
An Introduction To Modular Robots
 An Introduction To Modular Robots Introduction Morphology and Classification Locomotion Applications Challenges 11/24/09 Sebastian Rockel Introduction Definition (Robot) A robot is an artificial, intelligent,
An Introduction To Modular Robots Introduction Morphology and Classification Locomotion Applications Challenges 11/24/09 Sebastian Rockel Introduction Definition (Robot) A robot is an artificial, intelligent,
2. Publishable summary
 2. Publishable summary CogLaboration (Successful real World Human-Robot Collaboration: from the cognition of human-human collaboration to fluent human-robot collaboration) is a specific targeted research
2. Publishable summary CogLaboration (Successful real World Human-Robot Collaboration: from the cognition of human-human collaboration to fluent human-robot collaboration) is a specific targeted research
Rapid Development System for Humanoid Vision-based Behaviors with Real-Virtual Common Interface
 Rapid Development System for Humanoid Vision-based Behaviors with Real-Virtual Common Interface Kei Okada 1, Yasuyuki Kino 1, Fumio Kanehiro 2, Yasuo Kuniyoshi 1, Masayuki Inaba 1, Hirochika Inoue 1 1
Rapid Development System for Humanoid Vision-based Behaviors with Real-Virtual Common Interface Kei Okada 1, Yasuyuki Kino 1, Fumio Kanehiro 2, Yasuo Kuniyoshi 1, Masayuki Inaba 1, Hirochika Inoue 1 1
Imitation based Human-Robot Interaction -Roles of Joint Attention and Motion Prediction-
 Proceedings of the 2004 IEEE International Workshop on Robot and Human Interactive Communication Kurashiki, Okayama Japan September 20-22,2004 Imitation based Human-Robot Interaction -Roles of Joint Attention
Proceedings of the 2004 IEEE International Workshop on Robot and Human Interactive Communication Kurashiki, Okayama Japan September 20-22,2004 Imitation based Human-Robot Interaction -Roles of Joint Attention
An interdisciplinary collaboration of Theatre Arts and Social Robotics: The creation of empathy and embodiment in social robotics
 An interdisciplinary collaboration of Theatre Arts and Social Robotics: The creation of empathy and embodiment in social robotics Empathy: the ability to understand and share the feelings of another. Embodiment:
An interdisciplinary collaboration of Theatre Arts and Social Robotics: The creation of empathy and embodiment in social robotics Empathy: the ability to understand and share the feelings of another. Embodiment:
Live Hand Gesture Recognition using an Android Device
 Live Hand Gesture Recognition using an Android Device Mr. Yogesh B. Dongare Department of Computer Engineering. G.H.Raisoni College of Engineering and Management, Ahmednagar. Email- yogesh.dongare05@gmail.com
Live Hand Gesture Recognition using an Android Device Mr. Yogesh B. Dongare Department of Computer Engineering. G.H.Raisoni College of Engineering and Management, Ahmednagar. Email- yogesh.dongare05@gmail.com