WORKSHOP. Industrieroboter als Bearbeitungsmaschinen
|
|
|
- Opal Roberts
- 6 years ago
- Views:
Transcription
1 WORKSHOP Industrieroboter als Bearbeitungsmaschinen 21 März 2014, Fraunhofer IPK, Berlin Fortgeschrittene Rgelungsverfahren für die Bearbeitung mit den Industrierobotern Dragoljub Surdilovic, Fraunhofer IPK

2 Motivation Requirements of machining industry (both large and SME s) Flexibility Surface quality Accuracy Low volume - High precision Large Variety Cost/Time efficiency Other Appl 12% Other Process 10% Arc Welding 15% Painting 8% Spot Welding 20% Machine Tending & Materials Handling 35% Source: ABB Group Robotics, 2012 Potential benefits of industrial robots Flexibility Large working space Low costs (1/10 vs. CNC machines) Hurdles / challenges Low stiffness (1/100 vs CNC machines) Critical precision Low bandwidth (1/10 vs CNC machines)
3 Robotic Machining Overview Source: RIA, Robotic Machining White Paper Project, 2008.





4 Industrial robots for machining development trends FP7-NMP



 CAM")



5 Preliminary studies - ROBINSTONE project FP7-NMP D-scanners (ViALUX) CAM G-code generation in UGNX. Robot Program Generation in Easy- Realization (Comau C4GOpen) Rob

6 Robotic machining position and role Better understanding essential for industrial applications


7 FP7 COMET Project Plug-and-produce Components and Methods for adaptive control of industrial robots enabling cost effective, high precision manufacturing factories of the future
8 EU initiatives robotic machining COMET right first time machining High end milling Precision and quality through positioning High-tech (costs) sensory techniques Full automation Proprietary technology Mass production HEPHESTOS multi-steps iterative methodology Combination of processes (milling, grinding, polishing, drilling, tapping etc.) Precision and quality through force-feed control Affordable sensing technology Human-in-loop Open frameworks Low-batch high-variants manufacturing Some common points in planning and programming background for established cooperation

9 HEPHESTOS - Architectures FP7-NMP

10 Robot signature - planning FP7-NMP

11 API API FP7-NMP Function DLL s Integration Comau ORL - Interpolation INITIALIZE ipo_prep SIM_START ipo_prep IPO SIM_STEP ipo_prep EASY-ROB ipo_exec SIM_STOP ipo_prep ORL is running in Linux (VM) Communication via TCP/IP Socket TERMINATE ipo_prep
12 3 Use Case I NC-Import, Pre-Planning, Simulation, Program Export FP7-NMP

13 API API FP7-NMP Use Case I NC-Import, Pre-Planning, Simulation, Program Export CAD/CAM Software NC Path Pre-Planning + Simulation EASY-ROB PDL Program export

 Export fct_02() PDL")
14 Human Path API FP7-NMP Sensor Interface Pre-Planning + Simulation API Function DLL Export fct_01() Export fct_02() PDL Program export

15


16 Planning Path Correction FP7-NMP


17 Data streaming to the robot control - ROBOMOVE FP7-NMP


18 Manual programming FP7-NMP
19 Industrial Robot Control Systems Machining Operations (SOTA) Not a development goal (position and trajectory tracking control primarily, niche developments) Compensation control (payload, feed-forward dynamic control) Interaction control (extra package additional force control, general purpose, impedance control KUKA LWR) Trends for machining (CNC robot control, HEPHESTOS-Workshop 2013 Round table discussion : If automotive companies apply robots for machining, we will do something ) Specific control improvements are for machining applications are urgently needed
20 Improved Robot Control Machining Operations - I Position Control Improvements Ripple suppression Trajectory shaping Joint elasticity control and compensation (gears!) Compensation control (cutting forces) Compensation for joint change of direction (backlash, friction) Override control (real time adaptation) Increased stiffness of the controller
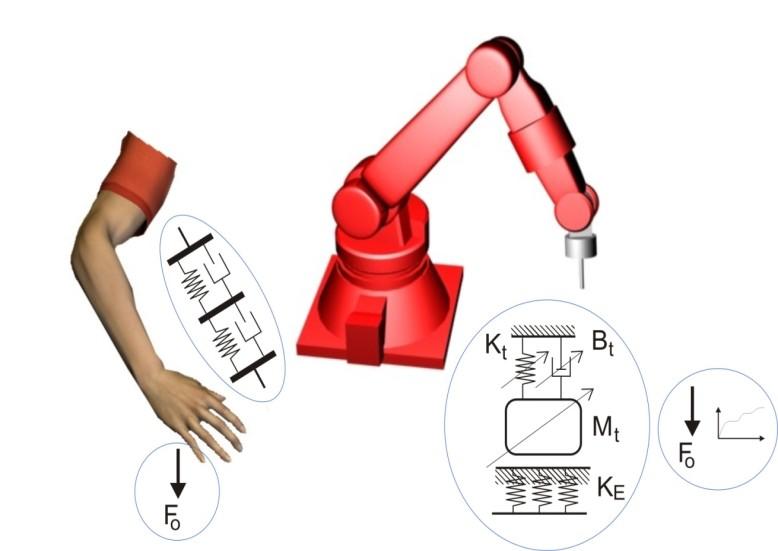
21 Improved Robot Control Machining Operations -II Contact-task task, force- and impedance based Control Position based impedance and force control Impedance control (milling robot configuration and direction compensation) Orthogonal force-feed control (grinding, polishing) Collinear force-feed control (milling) Feedback robot dynamic and cutting force disturbances compensation ( computed torque, resolved acceleration, nonlinear decoupling.- based interaction control) Human-robot interaction control (manual guidance, admittancedisplay, adaptive contact transition control)
, running activities (FP7 X-Act, FP7 IP ROBO-PARTNER), COMAU developments")
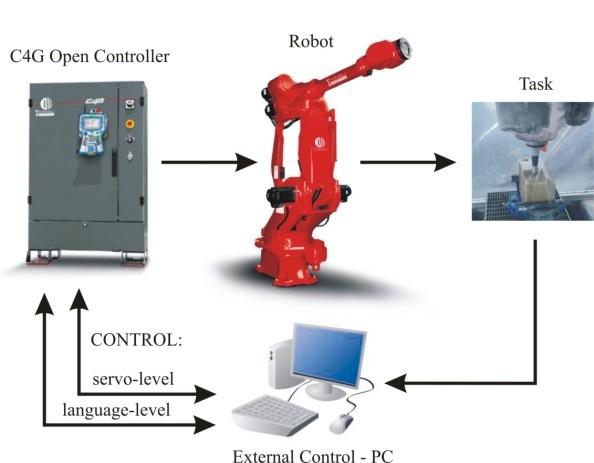
22 Integration Environment C4GOpen Preliminary developments (FP6 ARFLEX, ECHORD RODIN), running activities (FP7 X-Act, FP7 IP ROBO-PARTNER), COMAU developments (C5GOpen)
23 TCP orientation error - absolute value - [mrad] TCP path accuracy error - absolute value - [mm] FP7-NMP Position control initial experiments I (TRC) TCP path accuracy error T.R.C. off T.R.C. ON Time [s] TCP orientation error 0.2 T.R.C. off T.R.C. ON Time [s]


24 Position control path governor (backlash, friction compenstion)


25 Position based force/impedance control 25 years after Design, parameterization for various processes
 ME Messtechnik GmbH Patent pending")
26 HEPHESTOS Exploitable Result In-Spindle build F/T Sensor (5 DOF) ME Messtechnik GmbH Patent pending


 Feasible")

27 Hard metal Robotic Grinding Initial experiments ents FP7-NMP Very good removal rates (new tools) Feasible Feed-force control (further investigations) High frequent oscillations

28 Force/impedance control initial experiments polishing


29 Force/impedance control initial experiments polishing Force tracking : 1.5 N Good achieved performance: Feed tracking : 5, 10, 20 mm/s Force control : 1.5, 3, 5 N Easy Programming, Reproducibility Relatively good surface quality (Ra < 0.4 µm) (precise motion in robot dark motion zone )


30 Co-directional feed/force and force/impedance control algorithms



31 Hard metal Robotic End Milling Initial experiments ents FP7-NMP Feasible metal removal rates Critical chattering errors higher than registered robot control errors Relatively low forces (high frequent oscillations)

32 Hard metal (inconel) and novel tools (ceramic-based, PCD) New ceramic tools High speed (> rpm, 0.15 m/s) - power High temperatures (1500 C) Chip formation
33 Ceram ic tools ex perim ents Inconel FP7-NMP
34 Robot-Machining Process s Simulation FP7-NMP
35 Instead of Conclusion Adv anced robot control for machining - Perspectives Good potential to cope with robot machining problems and achieve goals Combination of milling (material removal), grinding and polishing (quality) operation needed to make final products Relevance of further development of tools and adaptation of control techniques Extensive use of modeling and model based control Experimental investigations (understanding of robot and control performance) and benchmarking are quite important Good perspectives also for robotic hard materials
 Backdriveability essential (not ensured) Peformance can not be guaranteed (IMPACT) Additional advanced safety sensors highly recommended Acceptance")
36 Safe/StableStable phri with industrial robots? Principially possible (smaller light-weight robots) Backdriveability essential (not ensured) Peformance can not be guaranteed (IMPACT) Additional advanced safety sensors highly recommended Acceptance critical (heavy robots) Distance to robot (process) critical Design of new intrinsically safe robot - quite favorable and motivated! FP7-NMP Echord RODIN (2013)

37 Human Robot (Cobot) Cooperative e Machining - Vision ion FP7-NMP
3.1 Publishable summary
 3.1 Publishable summary Project context and objectives HEPHESTOS' main objective is to develop novel technologies for the robotic hard material removal that will provide standard industrial robots with
3.1 Publishable summary Project context and objectives HEPHESTOS' main objective is to develop novel technologies for the robotic hard material removal that will provide standard industrial robots with
ERF2015 WORKSHOP. Flexibility and dexterity in industrial robots: Demonstrators of new frontiers in industrial applications
 ERF2015 WORKSHOP Flexibility and dexterity in industrial robots: Demonstrators of new frontiers in industrial applications 12 th March 2015, Vienna, Austria Compliance robot control for enhanced industrial
ERF2015 WORKSHOP Flexibility and dexterity in industrial robots: Demonstrators of new frontiers in industrial applications 12 th March 2015, Vienna, Austria Compliance robot control for enhanced industrial
Available online at ScienceDirect. Procedia CIRP 11 (2013 )
") Available online at www.sciencedirect.com ScienceDirect Procedia CIRP 11 (213 ) 234 238 2 nd International Through-life Engineering Services Conference Applicability of industrial robots for machining
Available online at www.sciencedirect.com ScienceDirect Procedia CIRP 11 (213 ) 234 238 2 nd International Through-life Engineering Services Conference Applicability of industrial robots for machining
Chapter 14 Automation of Manufacturing Processes and Systems
 Chapter 14 Automation of Manufacturing Processes and Systems Topics in Chapter 14 FIGURE 14.1 Outline of topics described in this chapter. Date 1500Ğ1600 1600Ğ1700 1700Ğ1800 1800Ğ1900 Development Water
Chapter 14 Automation of Manufacturing Processes and Systems Topics in Chapter 14 FIGURE 14.1 Outline of topics described in this chapter. Date 1500Ğ1600 1600Ğ1700 1700Ğ1800 1800Ğ1900 Development Water
Robots Learning from Robots: A proof of Concept Study for Co-Manipulation Tasks. Luka Peternel and Arash Ajoudani Presented by Halishia Chugani
 Robots Learning from Robots: A proof of Concept Study for Co-Manipulation Tasks Luka Peternel and Arash Ajoudani Presented by Halishia Chugani Robots learning from humans 1. Robots learn from humans 2.
Robots Learning from Robots: A proof of Concept Study for Co-Manipulation Tasks Luka Peternel and Arash Ajoudani Presented by Halishia Chugani Robots learning from humans 1. Robots learn from humans 2.
ROBOTICS, Jump to the next generation
 ROBOTICS, Jump to the next generation Erich Lohrmann Area Director Latin America KUKA Roboter GmbH COPY RIGHTS by Erich Lohrmann Human Evolution Robotic Evolution (by KUKA) International Conference on
ROBOTICS, Jump to the next generation Erich Lohrmann Area Director Latin America KUKA Roboter GmbH COPY RIGHTS by Erich Lohrmann Human Evolution Robotic Evolution (by KUKA) International Conference on
Mensch-Roboter-Zusammenarbeit Gestaltung sicherer, gesunder und wettbewerbsfähiger Arbeit 29 März 2017, BAuA-Dortmund
 Mensch-Roboter-Zusammenarbeit Gestaltung sicherer, gesunder und wettbewerbsfähiger Arbeit 29 März 2017, BAuA-Dortmund 3.Workshop D. Surdilovic, A. Bastidas-Cruz, J. Radojicic und P.Heynne: Interaktionsfähige
Mensch-Roboter-Zusammenarbeit Gestaltung sicherer, gesunder und wettbewerbsfähiger Arbeit 29 März 2017, BAuA-Dortmund 3.Workshop D. Surdilovic, A. Bastidas-Cruz, J. Radojicic und P.Heynne: Interaktionsfähige
Cognitive Systems and Robotics: opportunities in FP7
 Cognitive Systems and Robotics: opportunities in FP7 Austrian Robotics Summit July 3, 2009 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media European
Cognitive Systems and Robotics: opportunities in FP7 Austrian Robotics Summit July 3, 2009 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media European
Technical Cognitive Systems
 Part XII Actuators 3 Outline Robot Bases Hardware Components Robot Arms 4 Outline Robot Bases Hardware Components Robot Arms 5 (Wheeled) Locomotion Goal: Bring the robot to a desired pose (x, y, θ): (position
Part XII Actuators 3 Outline Robot Bases Hardware Components Robot Arms 4 Outline Robot Bases Hardware Components Robot Arms 5 (Wheeled) Locomotion Goal: Bring the robot to a desired pose (x, y, θ): (position
Robotic Polishing of Streamline Co-Extrusion Die: A Case Study
 Proceedings of the 2017 International Conference on Industrial Engineering and Operations Management (IEOM) Bristol, UK, July 24-25, 2017 Robotic Polishing of Streamline Co-Extrusion Die: A Case Study
Proceedings of the 2017 International Conference on Industrial Engineering and Operations Management (IEOM) Bristol, UK, July 24-25, 2017 Robotic Polishing of Streamline Co-Extrusion Die: A Case Study
Computer Aided Manufacturing
 Computer Aided Manufacturing CNC Milling used as representative example of CAM practice. CAM applies to lathes, lasers, waterjet, wire edm, stamping, braking, drilling, etc. CAM derives process information
Computer Aided Manufacturing CNC Milling used as representative example of CAM practice. CAM applies to lathes, lasers, waterjet, wire edm, stamping, braking, drilling, etc. CAM derives process information
More Info at Open Access Database by S. Dutta and T. Schmidt
 More Info at Open Access Database www.ndt.net/?id=17657 New concept for higher Robot position accuracy during thermography measurement to be implemented with the existing prototype automated thermography
More Info at Open Access Database www.ndt.net/?id=17657 New concept for higher Robot position accuracy during thermography measurement to be implemented with the existing prototype automated thermography
2014 Market Trends Webinar Series
 Robotic Industries Association 2014 Market Trends Webinar Series Watch live or archived at no cost Learn about the latest innovations in robotics Sponsored by leading robotics companies 1 2014 Calendar
Robotic Industries Association 2014 Market Trends Webinar Series Watch live or archived at no cost Learn about the latest innovations in robotics Sponsored by leading robotics companies 1 2014 Calendar
Special Patterns - Introduction. -Manufacture of large things -Technology Provider
 Special Patterns - Introduction -Manufacture of large things -Technology Provider Deny Tanuwidjaja (M.EngElectronics and Control Systems) 6 Years Robot programming 4 Years Control systems programming 5
Special Patterns - Introduction -Manufacture of large things -Technology Provider Deny Tanuwidjaja (M.EngElectronics and Control Systems) 6 Years Robot programming 4 Years Control systems programming 5
Is your next colleague a cobot?
 Is your next colleague a cobot? Technifutur 29 November 2016 30.11.16 1 Agenda Main features Cobots vs industrial robots Add-ons Trends Case assessment Demonstrator 30.11.16 2 What s in a name? "Collaborative
Is your next colleague a cobot? Technifutur 29 November 2016 30.11.16 1 Agenda Main features Cobots vs industrial robots Add-ons Trends Case assessment Demonstrator 30.11.16 2 What s in a name? "Collaborative
Robotics 2 Collision detection and robot reaction
 Robotics 2 Collision detection and robot reaction Prof. Alessandro De Luca Handling of robot collisions! safety in physical Human-Robot Interaction (phri)! robot dependability (i.e., beyond reliability)!
Robotics 2 Collision detection and robot reaction Prof. Alessandro De Luca Handling of robot collisions! safety in physical Human-Robot Interaction (phri)! robot dependability (i.e., beyond reliability)!
Chapter 2 High Speed Machining
 Chapter 2 High Speed Machining 1 WHAT IS HIGH SPEED MACHINING (HSM)??? Low Speed High Speed 2 Defined as the use of higher spindle speeds and axis feed rates to achieve high material removal rates without
Chapter 2 High Speed Machining 1 WHAT IS HIGH SPEED MACHINING (HSM)??? Low Speed High Speed 2 Defined as the use of higher spindle speeds and axis feed rates to achieve high material removal rates without
Control of the Grinding Process Using In-Process Gage Feedback
 Control of the Grinding Process Using In-Process Gage Feedback PMRC Industrial Advisory Board Meeting Georgia Institute of Technology October 2000 David Longanbach Overview Research Objective Need for
Control of the Grinding Process Using In-Process Gage Feedback PMRC Industrial Advisory Board Meeting Georgia Institute of Technology October 2000 David Longanbach Overview Research Objective Need for
Active Vibration Control in Ultrasonic Wire Bonding Improving Bondability on Demanding Surfaces
 Active Vibration Control in Ultrasonic Wire Bonding Improving Bondability on Demanding Surfaces By Dr.-Ing. Michael Brökelmann, Hesse GmbH Ultrasonic wire bonding is an established technology for connecting
Active Vibration Control in Ultrasonic Wire Bonding Improving Bondability on Demanding Surfaces By Dr.-Ing. Michael Brökelmann, Hesse GmbH Ultrasonic wire bonding is an established technology for connecting
 UNIT-1 INTRODUCATION The field of robotics has its origins in science fiction. The term robot was derived from the English translation of a fantasy play written in Czechoslovakia around 1920. It took another
UNIT-1 INTRODUCATION The field of robotics has its origins in science fiction. The term robot was derived from the English translation of a fantasy play written in Czechoslovakia around 1920. It took another
Hauschild GmbH. Magazine systems, Process automation, Robotic machining cells, Sorters
 GmbH Hauschild Hauschild GmbH Kohlfurther Brücke 69 42349 Wuppertal Germany Tel.: +49 202 24742-0 Fax: +49 202 24742-42 info@hauschildgmbh.com www.hauschildgmbh.com Magazine systems, Process automation,
GmbH Hauschild Hauschild GmbH Kohlfurther Brücke 69 42349 Wuppertal Germany Tel.: +49 202 24742-0 Fax: +49 202 24742-42 info@hauschildgmbh.com www.hauschildgmbh.com Magazine systems, Process automation,
Improvement of thickness tolerances for a two-stand aluminum cold rolling mill
 Improvement of thickness tolerances for a two-stand aluminum cold rolling mill The implementation of additional control loops to compensate backup roll eccentricity and harmonic hardness variation allows
Improvement of thickness tolerances for a two-stand aluminum cold rolling mill The implementation of additional control loops to compensate backup roll eccentricity and harmonic hardness variation allows
Numerical Control (NC) and The A(4) Level of Automation
 and The A(4) Level of Automation") Numerical Control (NC) and The A(4) Level of Automation Chapter 40 40.1 Introduction Numeric Control (NC) and Computer Numeric Control (CNC) are means by which machine centers are used to produce repeatable
Numerical Control (NC) and The A(4) Level of Automation Chapter 40 40.1 Introduction Numeric Control (NC) and Computer Numeric Control (CNC) are means by which machine centers are used to produce repeatable
NUMERICAL CONTROL.
 NUMERICAL CONTROL http://www.toolingu.com/definition-300200-12690-tool-offset.html NC &CNC Numeric Control (NC) and Computer Numeric Control (CNC) are means by which machine centers are used to produce
NUMERICAL CONTROL http://www.toolingu.com/definition-300200-12690-tool-offset.html NC &CNC Numeric Control (NC) and Computer Numeric Control (CNC) are means by which machine centers are used to produce
Human-like Assembly Robots in Factories
 5-88 June Symposium on Japan America Frontier of Engineering (JAFOE) Robotics Session: Human-like Assembly Robots in Factories 8th June Robotics Technology R&D Group Shingo Ando 0520 Introduction: Overview
5-88 June Symposium on Japan America Frontier of Engineering (JAFOE) Robotics Session: Human-like Assembly Robots in Factories 8th June Robotics Technology R&D Group Shingo Ando 0520 Introduction: Overview
Hammer: An Android Based Application for End-User Industrial Robot Programming
 Hammer: An Android Based Application for End-User Industrial Robot Programming Carlos Mateo, Alberto Brunete, Ernesto Gambao, Miguel Hernando Centre for Robotics and Automation (CAR UPM-CSIC) Universidad
Hammer: An Android Based Application for End-User Industrial Robot Programming Carlos Mateo, Alberto Brunete, Ernesto Gambao, Miguel Hernando Centre for Robotics and Automation (CAR UPM-CSIC) Universidad
LEISTRITZ PRODUKTIONSTECHNIK GMBH. Machine Tools. Automotive Industry
 LEISTRITZ PRODUKTIONSTECHNIK GMBH Machine Tools Automotive Industry 1 Automotive Applications Rack-and-pinion steering system [2] EPS steering technology [1] 2 Automotive Applications Windshield wiper
LEISTRITZ PRODUKTIONSTECHNIK GMBH Machine Tools Automotive Industry 1 Automotive Applications Rack-and-pinion steering system [2] EPS steering technology [1] 2 Automotive Applications Windshield wiper
Available theses (October 2012) MERLIN Group
 MERLIN Group") Available theses (October 2012) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
Available theses (October 2012) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
Process Planning - The Link Between Varying Products and their Manufacturing Systems p. 37
 Definitions and Strategies Changeability - An Introduction p. 3 Motivation p. 3 Evolution of Factories p. 7 Deriving the Objects of Changeability p. 8 Elements of Changeable Manufacturing p. 10 Factory
Definitions and Strategies Changeability - An Introduction p. 3 Motivation p. 3 Evolution of Factories p. 7 Deriving the Objects of Changeability p. 8 Elements of Changeable Manufacturing p. 10 Factory
of harmonic cancellation algorithms The internal model principle enable precision motion control Dynamic control
 Dynamic control Harmonic cancellation algorithms enable precision motion control The internal model principle is a 30-years-young idea that serves as the basis for a myriad of modern motion control approaches.
Dynamic control Harmonic cancellation algorithms enable precision motion control The internal model principle is a 30-years-young idea that serves as the basis for a myriad of modern motion control approaches.
Quick, Exact, Universal Digital Axis Controllers of the LPKF DAC1005 Series
 Quick, Exact, Universal Digital Axis Controllers of the LPKF DAC1005 Series Universal Motor Control In the development of system concepts, it is a big advantage if the motor controls can be integrated
Quick, Exact, Universal Digital Axis Controllers of the LPKF DAC1005 Series Universal Motor Control In the development of system concepts, it is a big advantage if the motor controls can be integrated
Fine Surface Technology
 1 2 3 Fine Surface Technology Fine Surface Technology High quality machining is becoming more and more important in all factory processes, especially for: Die molds Parts of mobile phone and tablet PC
1 2 3 Fine Surface Technology Fine Surface Technology High quality machining is becoming more and more important in all factory processes, especially for: Die molds Parts of mobile phone and tablet PC
Affordable Real-Time Vision Guidance for Robot Motion Control
 Affordable Real-Time Vision Guidance for Robot Motion Control Cong Wang Assistant Professor ECE and MIE Departments New Jersey Institute of Technology Mobile: (510)529-6691 Office: (973)596-5744 Advanced
Affordable Real-Time Vision Guidance for Robot Motion Control Cong Wang Assistant Professor ECE and MIE Departments New Jersey Institute of Technology Mobile: (510)529-6691 Office: (973)596-5744 Advanced
Development of Robotic Machine Tool Towards Industrial Business. Huapeng Wu, Heikki Handroos Lappeenranta University of Technology
 Development of Robotic Machine Tool Towards Industrial Business Huapeng Wu, Heikki Handroos Lappeenranta University of Technology 1. Background Since 2000, the EFDA in EU has launched several tasks to
Development of Robotic Machine Tool Towards Industrial Business Huapeng Wu, Heikki Handroos Lappeenranta University of Technology 1. Background Since 2000, the EFDA in EU has launched several tasks to
Innovative Rear End Machining
 Product Information CNC Multi-Spindle Automatic Lathe Innovative Rear End Machining With many new and improved functions, the front-opening six-spindle lathe with up to twelve cross-slides in the work
Product Information CNC Multi-Spindle Automatic Lathe Innovative Rear End Machining With many new and improved functions, the front-opening six-spindle lathe with up to twelve cross-slides in the work
Computer Assisted Medical Interventions
 Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
Industrial and service robotics: state of the art and trends Paolo Rocco
 Industrial and service robotics: state of the art and trends Paolo Rocco Politecnico di Milano - Dipartimento di Elettronica, Informazione e Bioingegneria Workshop Future trends in machine tools and manufacturing
Industrial and service robotics: state of the art and trends Paolo Rocco Politecnico di Milano - Dipartimento di Elettronica, Informazione e Bioingegneria Workshop Future trends in machine tools and manufacturing
CamGrind L. Key data. Superproductive and perfect for batch production. A member of the UNITED GRINDING Group
 A member of the UNITED GRINDING Group Superproductive and perfect for batch production Key data The as a single-slide or two-slide machine allows you to machine shaft-type components with a length of up
A member of the UNITED GRINDING Group Superproductive and perfect for batch production Key data The as a single-slide or two-slide machine allows you to machine shaft-type components with a length of up
profile Using intelligent servo drives to filter mechanical resonance and improve machine accuracy in printing and converting machinery
 profile Drive & Control Using intelligent servo drives to filter mechanical resonance and improve machine accuracy in printing and converting machinery Challenge: Controlling machine resonance the white
profile Drive & Control Using intelligent servo drives to filter mechanical resonance and improve machine accuracy in printing and converting machinery Challenge: Controlling machine resonance the white
ROBOTIC AUTOMATION Imagine Your Business...better. Automate Virtually Anything
 John Henry Foster ROBOTIC AUTOMATION Imagine Your Business...better. Automate Virtually Anything 800.582.5162 John Henry Foster 800.582.5162 At John Henry Foster, we re devoted to bringing safe, flexible,
John Henry Foster ROBOTIC AUTOMATION Imagine Your Business...better. Automate Virtually Anything 800.582.5162 John Henry Foster 800.582.5162 At John Henry Foster, we re devoted to bringing safe, flexible,
Challenges of Precision Assembly with a Miniaturized Robot
 Challenges of Precision Assembly with a Miniaturized Robot Arne Burisch, Annika Raatz, and Jürgen Hesselbach Technische Universität Braunschweig, Institute of Machine Tools and Production Technology Langer
Challenges of Precision Assembly with a Miniaturized Robot Arne Burisch, Annika Raatz, and Jürgen Hesselbach Technische Universität Braunschweig, Institute of Machine Tools and Production Technology Langer
Automatic Control Motion control Advanced control techniques
 Automatic Control Motion control Advanced control techniques (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Motivations (I) 2 Besides the classical
Automatic Control Motion control Advanced control techniques (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Motivations (I) 2 Besides the classical
Bruno Siciliano Luigi Villani Vincenzo Lippiello. Francesca Cordella Mariacarla Staffa.
 1/20 Robotics @ PRISMA Lab Bruno Siciliano Luigi Villani Vincenzo Lippiello Fanny Ficuciello i Fabio Ruggiero Francesca Cordella Mariacarla Staffa www.prisma.unina.it i it 18 February 2010 City 1,200,000
1/20 Robotics @ PRISMA Lab Bruno Siciliano Luigi Villani Vincenzo Lippiello Fanny Ficuciello i Fabio Ruggiero Francesca Cordella Mariacarla Staffa www.prisma.unina.it i it 18 February 2010 City 1,200,000
Multi-aperture camera module with 720presolution
 Multi-aperture camera module with 720presolution using microoptics A. Brückner, A. Oberdörster, J. Dunkel, A. Reimann, F. Wippermann, A. Bräuer Fraunhofer Institute for Applied Optics and Precision Engineering
Multi-aperture camera module with 720presolution using microoptics A. Brückner, A. Oberdörster, J. Dunkel, A. Reimann, F. Wippermann, A. Bräuer Fraunhofer Institute for Applied Optics and Precision Engineering
ACTUATORS AND SENSORS. Joint actuating system. Servomotors. Sensors
 ACTUATORS AND SENSORS Joint actuating system Servomotors Sensors JOINT ACTUATING SYSTEM Transmissions Joint motion low speeds high torques Spur gears change axis of rotation and/or translate application
ACTUATORS AND SENSORS Joint actuating system Servomotors Sensors JOINT ACTUATING SYSTEM Transmissions Joint motion low speeds high torques Spur gears change axis of rotation and/or translate application
Piezoelectric multilayer triaxial accelerometer
 Piezoelectric multilayer triaxial accelerometer C. Mangeot 1, B. Andersen 1, and M. Havránek 2 1 Noliac Motion, 2 Noliac Systems Hejreskovvej 18, Kvistgaard, 3470, Denmark Version: 200705 The accelerometer
Piezoelectric multilayer triaxial accelerometer C. Mangeot 1, B. Andersen 1, and M. Havránek 2 1 Noliac Motion, 2 Noliac Systems Hejreskovvej 18, Kvistgaard, 3470, Denmark Version: 200705 The accelerometer
Method of Accurate Countersinking and Rivet Shaving
 2001-01-2569 Method of Accurate Countersinking and Rivet Shaving Copyright 2001 Society of Automotive Engineers, Inc. Todd Rudberg and Scott Smith Electroimpact, Inc. Andy Smith Airbus UK, Ltd. ABSTRACT
2001-01-2569 Method of Accurate Countersinking and Rivet Shaving Copyright 2001 Society of Automotive Engineers, Inc. Todd Rudberg and Scott Smith Electroimpact, Inc. Andy Smith Airbus UK, Ltd. ABSTRACT
DRAG FINISHING UNITS DF SERIES
 DRAG FINISHING UNITS DF SERIES PERFECT SURFACES WORLDWIDE 2 THE DRAG FINISHING PROCESS OTEC: WE MAKE THE DIFFERENCE Polishing, deburring, rounding or smoothing: We build drag finishing systems to finish
DRAG FINISHING UNITS DF SERIES PERFECT SURFACES WORLDWIDE 2 THE DRAG FINISHING PROCESS OTEC: WE MAKE THE DIFFERENCE Polishing, deburring, rounding or smoothing: We build drag finishing systems to finish
The robot capable of understanding human-like instructions
 The European Robot Initiative for Strengthening the Competitiveness of SMEs in Manufacturing The robot capable of understanding human-like instructions Contents of this Presentation Introduction Human
The European Robot Initiative for Strengthening the Competitiveness of SMEs in Manufacturing The robot capable of understanding human-like instructions Contents of this Presentation Introduction Human
WHERE WE LIVE, QUALITY HAS A LONG TRADITION STREAM FINISHING UNITS SF SERIES. Precision finish demands. Precision finish demands. CF Series.
 Precision finish demands Precision finish demands WHERE WE LIVE, QUALITY HAS A LONG TRADITION Founded in 1996, OTEC has quickly established itself as the market s technology leader by developing new machine
Precision finish demands Precision finish demands WHERE WE LIVE, QUALITY HAS A LONG TRADITION Founded in 1996, OTEC has quickly established itself as the market s technology leader by developing new machine
ROBO-PARTNER: Safe human-robot collaboration for assembly: case studies and challenges
 ROBO-PARTNER: Safe human-robot collaboration for assembly: case studies and challenges Dr. George Michalos University of Patras ROBOT FORUM ASSEMBLY 16 March 2016 Parma, Italy Introduction Human sensitivity
ROBO-PARTNER: Safe human-robot collaboration for assembly: case studies and challenges Dr. George Michalos University of Patras ROBOT FORUM ASSEMBLY 16 March 2016 Parma, Italy Introduction Human sensitivity
TIMTOS 2017 EXHIBITS PROFILE
 TIMTOS 2017 EXHIBITS PROFILE Product Code Product Name METAL CUTTING MACHINE TOOL Lathes and Turning Machines 160101 Lathes, Swiss Type 160502 Bench Lathes 160503 High Speed Lathes 160504 Automatic Lathes
TIMTOS 2017 EXHIBITS PROFILE Product Code Product Name METAL CUTTING MACHINE TOOL Lathes and Turning Machines 160101 Lathes, Swiss Type 160502 Bench Lathes 160503 High Speed Lathes 160504 Automatic Lathes
USING ROBOTS TO MATERIAL REMOVAL PROCESSES
 Fábio de Oliveira Campos 1, Armando Carlos de Pina Filho 2, Aloísio Carlos de Pina 3 1 Universidade Federal do Rio de Janeiro, Mechanical Engineering Department, Polytechnic School, Rio de Janeiro - RJ,
Fábio de Oliveira Campos 1, Armando Carlos de Pina Filho 2, Aloísio Carlos de Pina 3 1 Universidade Federal do Rio de Janeiro, Mechanical Engineering Department, Polytechnic School, Rio de Janeiro - RJ,
Computer Numeric Control
 Computer Numeric Control TA202A 2017-18(2 nd ) Semester Prof. J. Ramkumar Department of Mechanical Engineering IIT Kanpur Computer Numeric Control A system in which actions are controlled by the direct
Computer Numeric Control TA202A 2017-18(2 nd ) Semester Prof. J. Ramkumar Department of Mechanical Engineering IIT Kanpur Computer Numeric Control A system in which actions are controlled by the direct
APAS assistant. Product scope
 APAS assistant Product scope APAS assistant Table of contents Non-contact human-robot collaboration for the Smart Factory Robots have improved the working world in the past years in many ways. Above and
APAS assistant Product scope APAS assistant Table of contents Non-contact human-robot collaboration for the Smart Factory Robots have improved the working world in the past years in many ways. Above and
Computer Numerical Control (CNC) Hacettepe University Chemical Engineering Department
 Hacettepe University Chemical Engineering Department") Computer Numerical Control (CNC) Banu Akar Duygu Gökçe Neşe Kaynak Meltem Erdi Hacettepe University Chemical Engineering Department 22.12.2010 CONTENT 1. What are NC & CNC? 2. History 3. CNC system Elements
Computer Numerical Control (CNC) Banu Akar Duygu Gökçe Neşe Kaynak Meltem Erdi Hacettepe University Chemical Engineering Department 22.12.2010 CONTENT 1. What are NC & CNC? 2. History 3. CNC system Elements
John Henry Foster INTRODUCING OUR NEW ROBOTICS LINE. Imagine Your Business...better. Automate Virtually Anything jhfoster.
 John Henry Foster INTRODUCING OUR NEW ROBOTICS LINE Imagine Your Business...better. Automate Virtually Anything 800.582.5162 John Henry Foster 800.582.5162 What if you could automate the repetitive manual
John Henry Foster INTRODUCING OUR NEW ROBOTICS LINE Imagine Your Business...better. Automate Virtually Anything 800.582.5162 John Henry Foster 800.582.5162 What if you could automate the repetitive manual
WHERE WE LIVE, QUALITY HAS A LONG TRADITION DRAG FINISHING UNITS SF SERIES. Precision finish demands. Precision finish demands
 Precision finish demands WHERE WE LIVE, QUALITY HAS A LONG TRADITION Precision finish demands DRAG FINISHING UNITS DF SERIES Founded in 1996, OTEC has quickly estab lished itself as the market s technology
Precision finish demands WHERE WE LIVE, QUALITY HAS A LONG TRADITION Precision finish demands DRAG FINISHING UNITS DF SERIES Founded in 1996, OTEC has quickly estab lished itself as the market s technology
Introduction To Robotics (Kinematics, Dynamics, and Design)
") Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 5: Concepts & Defenitions Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 5: Concepts & Defenitions Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
Conversion of NC-code into a robot program
 Conversion of NC-code into a robot program October 2017 Version 1.4 Subject to change or improve without prior notice 2/12 General flow chart The following flowchart shows the general process flow during
Conversion of NC-code into a robot program October 2017 Version 1.4 Subject to change or improve without prior notice 2/12 General flow chart The following flowchart shows the general process flow during
Software update news about digital manufacturing tools and software
 s Software update news about digital manufacturing tools and software Chahe Bakmazjian Business Team Leader Hypertherm Robotic Software Laurent, Quebec, Canada www.robotmaster.com Programming Robots Gets
s Software update news about digital manufacturing tools and software Chahe Bakmazjian Business Team Leader Hypertherm Robotic Software Laurent, Quebec, Canada www.robotmaster.com Programming Robots Gets
Application Case. Delta Industrial Automation Products for Vertical CNC Machining Centers with Automatic Tool Changers (ATC)
") Case Delta Industrial Automation Products for Vertical CNC Machining Centers with Automatic Tool Changers (ATC) Issued by Solution Center Date July, 2014 Pages 5 Applicable to Key words NC311 Series CNC
Case Delta Industrial Automation Products for Vertical CNC Machining Centers with Automatic Tool Changers (ATC) Issued by Solution Center Date July, 2014 Pages 5 Applicable to Key words NC311 Series CNC
Machine Vision for Collaborative Robot Applications. David L. Dechow FANUC America Corporation
 Machine Vision for Collaborative Robot Applications David L. Dechow FANUC America Corporation Topics Overview of collaborative robot technologies The roles for machine vision It s still machine vision
Machine Vision for Collaborative Robot Applications David L. Dechow FANUC America Corporation Topics Overview of collaborative robot technologies The roles for machine vision It s still machine vision
STREAM FINISHING MACHINES
 Structure and function 2 (SF) Technique Workpieces are fixed in a holder and immersed in a rotating process container filled with grinding or polishing granulate. Grinding effect due to the grinding and
Structure and function 2 (SF) Technique Workpieces are fixed in a holder and immersed in a rotating process container filled with grinding or polishing granulate. Grinding effect due to the grinding and
Available online at ScienceDirect. Procedia Engineering 132 (2015 )
") Available online at www.sciencedirect.com ScienceDirect Procedia Engineering 132 (2015 ) 911 917 The Manufacturing Engineering Society International Conference, MESIC 2015 Overview of the state of robotic
Available online at www.sciencedirect.com ScienceDirect Procedia Engineering 132 (2015 ) 911 917 The Manufacturing Engineering Society International Conference, MESIC 2015 Overview of the state of robotic
INDIAN INSTITUTE OF TECHNOLOGY KHARAGPUR NPTEL ONLINE CERTIFICATION COURSE. On Industrial Automation and Control
 INDIAN INSTITUTE OF TECHNOLOGY KHARAGPUR NPTEL ONLINE CERTIFICATION COURSE On Industrial Automation and Control By Prof. S. Mukhopadhyay Department of Electrical Engineering IIT Kharagpur Topic Lecture
INDIAN INSTITUTE OF TECHNOLOGY KHARAGPUR NPTEL ONLINE CERTIFICATION COURSE On Industrial Automation and Control By Prof. S. Mukhopadhyay Department of Electrical Engineering IIT Kharagpur Topic Lecture
STATE COUNCIL OF EDUCATIONAL RESEARCH AND TRAINING TNCF DRAFT SYLLABUS
 STATE COUNCIL OF EDUCATIONAL RESEARCH AND TRAINING TNCF 2017 - DRAFT SYLLABUS Subject :GENERAL MACHINIST - Theory Class : XI TOPIC CONTENT 1. Workshop Engineering Introduction; Machinist; Duties; Role
STATE COUNCIL OF EDUCATIONAL RESEARCH AND TRAINING TNCF 2017 - DRAFT SYLLABUS Subject :GENERAL MACHINIST - Theory Class : XI TOPIC CONTENT 1. Workshop Engineering Introduction; Machinist; Duties; Role
Some Issues on Integrating Telepresence Technology into Industrial Robotic Assembly
 Some Issues on Integrating Telepresence Technology into Industrial Robotic Assembly Gunther Reinhart and Marwan Radi Abstract Since the 1940s, many promising telepresence research results have been obtained.
Some Issues on Integrating Telepresence Technology into Industrial Robotic Assembly Gunther Reinhart and Marwan Radi Abstract Since the 1940s, many promising telepresence research results have been obtained.
Content. Contributors... xix
 Content Contributors... xix 1 Machine Tools for Removal Processes: A General View... 1 L. Norberto López de Lacalle and A. Lamikiz 1.1 Basic Definitions and History... 1 1.1.1 Historical Remarks... 2 1.2
Content Contributors... xix 1 Machine Tools for Removal Processes: A General View... 1 L. Norberto López de Lacalle and A. Lamikiz 1.1 Basic Definitions and History... 1 1.1.1 Historical Remarks... 2 1.2
Isolated, Thermocouple Input 7B37 FEATURES APPLICATIONS PRODUCT OVERVIEW FUNCTIONAL BLOCK DIAGRAM
 Isolated, Thermocouple Input 7B37 FEATURES Interfaces, amplifies, and filters input voltages from a J, K, T, E, R, S, or B-type thermocouple. Module provides a precision output of either +1 V to +5 V or
Isolated, Thermocouple Input 7B37 FEATURES Interfaces, amplifies, and filters input voltages from a J, K, T, E, R, S, or B-type thermocouple. Module provides a precision output of either +1 V to +5 V or
Isolated, Linearized Thermocouple Input 7B47 FEATURES APPLICATIONS PRODUCT OVERVIEW FUNCTIONAL BLOCK DIAGRAM
 Isolated, Linearized Thermocouple Input 7B47 FEATURES Interfaces, amplifies and filters input voltages from a J, K, T, E, R, S, B or N-type thermocouple. Module provides a precision output of either +1
Isolated, Linearized Thermocouple Input 7B47 FEATURES Interfaces, amplifies and filters input voltages from a J, K, T, E, R, S, B or N-type thermocouple. Module provides a precision output of either +1
Launch of Successor, a New Robot System that Reproduces the Movements of Expert Engineers Through Remote Collaboration
 Launch of Successor, a New Robot System that Reproduces the Movements of Expert Engineers Through Remote Collaboration - A new solution for fields where robotization has been difficult to achieve - 1950
Launch of Successor, a New Robot System that Reproduces the Movements of Expert Engineers Through Remote Collaboration - A new solution for fields where robotization has been difficult to achieve - 1950
CamGrind Cylindrical and noncircular grinding
 A member of the UNITED GRINDING Group CamGrind Cylindrical and noncircular grinding Key data Camshaft grinding to perfection! The CamGrind series offers modular precision machines for cylindrical and noncircular
A member of the UNITED GRINDING Group CamGrind Cylindrical and noncircular grinding Key data Camshaft grinding to perfection! The CamGrind series offers modular precision machines for cylindrical and noncircular
Pan-Tilt Signature System
 Pan-Tilt Signature System Pan-Tilt Signature System Rob Gillette Matt Cieloszyk Luke Bowen Final Presentation Introduction Problem Statement: We proposed to build a device that would mimic human script
Pan-Tilt Signature System Pan-Tilt Signature System Rob Gillette Matt Cieloszyk Luke Bowen Final Presentation Introduction Problem Statement: We proposed to build a device that would mimic human script
Smart Products and Digital Industry Prof. Dr.-Ing. Dietmar Goehlich
 Smart Products and Digital Industry Prof. Dr.-Ing. Dietmar Goehlich Technische Universität Berlin Faculty of Mechanical Engineering and Transport Systems Methods for Product Development and Mechatronics
Smart Products and Digital Industry Prof. Dr.-Ing. Dietmar Goehlich Technische Universität Berlin Faculty of Mechanical Engineering and Transport Systems Methods for Product Development and Mechatronics
PicoMill CNC. PicoMill CNC. High-tech for Production and Training Purposes. CNC Mini Drill Press/Milling Machine.
 CNC Mini Drill Press/Milling Machine High-tech for Production and Training Purposes Table travel X, Y 10 x 4.13 Spindle mount MT3 With advanced GPlus 450 CNC or Siemens 808 D control GPlus 450 Siemens
CNC Mini Drill Press/Milling Machine High-tech for Production and Training Purposes Table travel X, Y 10 x 4.13 Spindle mount MT3 With advanced GPlus 450 CNC or Siemens 808 D control GPlus 450 Siemens
SENLUTION Miniature Angular & Heading Reference System The World s Smallest Mini-AHRS
 SENLUTION Miniature Angular & Heading Reference System The World s Smallest Mini-AHRS MotionCore, the smallest size AHRS in the world, is an ultra-small form factor, highly accurate inertia system based
SENLUTION Miniature Angular & Heading Reference System The World s Smallest Mini-AHRS MotionCore, the smallest size AHRS in the world, is an ultra-small form factor, highly accurate inertia system based
HIGH CAPACITY IN A COMPACT MACHINE BED TYPE MILLING MACHINES TA-A / TA-D / TA-M
 HIGH CAPACITY IN A COMPACT MACHINE BED TYPE MILLING MACHINES TA-A / TA-D / TA-M 2 3 HIGH STOCK REMOVAL CAPACITY The new generation of SORALUCE TA-A / TA-D / TA-M brings the customer important improvements
HIGH CAPACITY IN A COMPACT MACHINE BED TYPE MILLING MACHINES TA-A / TA-D / TA-M 2 3 HIGH STOCK REMOVAL CAPACITY The new generation of SORALUCE TA-A / TA-D / TA-M brings the customer important improvements
Perception. Read: AIMA Chapter 24 & Chapter HW#8 due today. Vision
 11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
Advanced Motion Control Optimizes Mechanical Micro-Drilling
 Advanced Motion Control Optimizes Mechanical Micro-Drilling The following discussion will focus on how to implement advanced motion control technology to improve the performance of mechanical micro-drilling
Advanced Motion Control Optimizes Mechanical Micro-Drilling The following discussion will focus on how to implement advanced motion control technology to improve the performance of mechanical micro-drilling
Product information. QXD 200 Disc eroding machine for the complete processing of PCD tools. NEW: with automated polishing process for PCD-tips.
 Product information QXD 200 Disc eroding machine for the complete processing of PCD tools. NEW: with automated polishing process for PCD-tips. - QXD 200 The idea. Increased productivity and secure future
Product information QXD 200 Disc eroding machine for the complete processing of PCD tools. NEW: with automated polishing process for PCD-tips. - QXD 200 The idea. Increased productivity and secure future
Isolated, Linearized RTD Input 7B34 FEATURES APPLICATIONS PRODUCT OVERVIEW FUNCTIONAL BLOCK DIAGRAM
 Isolated, Linearized RTD Input 7B34 FEATURES Amplifies, Protects, Filters, and interfaces input voltages from a wide variety of two and three-wire platinum, copper and nickel Resistor Temperature Detectors
Isolated, Linearized RTD Input 7B34 FEATURES Amplifies, Protects, Filters, and interfaces input voltages from a wide variety of two and three-wire platinum, copper and nickel Resistor Temperature Detectors
ESPRIT ProfitMilling A Technical Overview
 ESPRIT ProfitMilling A Technical Overview Contents ProfitMilling : What is it? Benefits to Manufacturers Traditional Roughing Limitations ProfitMilling Advantages Benefits of ProfitMilling Energy Consumption
ESPRIT ProfitMilling A Technical Overview Contents ProfitMilling : What is it? Benefits to Manufacturers Traditional Roughing Limitations ProfitMilling Advantages Benefits of ProfitMilling Energy Consumption
ShaftGrind S. Key data. Compact and extremely versatile. A member of the UNITED GRINDING Group
 A member of the UNITED GRINDING Group Compact and extremely versatile Key data The allows you to grind shaft-type workpieces with a length of up to 650 mm. This small, versatile grinding machine guarantees
A member of the UNITED GRINDING Group Compact and extremely versatile Key data The allows you to grind shaft-type workpieces with a length of up to 650 mm. This small, versatile grinding machine guarantees
STEPMAN Newsletter. Introduction
 STEPMAN Newsletter Issue 3 Introduction The project is supported by the Seventh Framework Program (FP7) under the Research for the Benefit of SME Associations scheme. 10 participants (3 associations, 3
STEPMAN Newsletter Issue 3 Introduction The project is supported by the Seventh Framework Program (FP7) under the Research for the Benefit of SME Associations scheme. 10 participants (3 associations, 3
PRO-MASTER CNC Production for Professionals PRODUCTIVITY AND PRECISION
 Edgebanders CNC Machining Centers Vertical Panel Saws Pressure Beam Saws Panel Handling CNC Production for Professionals PRO-MASTER 7017 7018 PRODUCTIVITY AND PRECISION PRO-MASTER 7017 7018 High Efficiency
Edgebanders CNC Machining Centers Vertical Panel Saws Pressure Beam Saws Panel Handling CNC Production for Professionals PRO-MASTER 7017 7018 PRODUCTIVITY AND PRECISION PRO-MASTER 7017 7018 High Efficiency
Advanced Digital Motion Control Using SERCOS-based Torque Drives
 Advanced Digital Motion Using SERCOS-based Torque Drives Ying-Yu Tzou, Andes Yang, Cheng-Chang Hsieh, and Po-Ching Chen Power Electronics & Motion Lab. Dept. of Electrical and Engineering National Chiao
Advanced Digital Motion Using SERCOS-based Torque Drives Ying-Yu Tzou, Andes Yang, Cheng-Chang Hsieh, and Po-Ching Chen Power Electronics & Motion Lab. Dept. of Electrical and Engineering National Chiao
Telematic Control and Communication with Industrial Robot over Ethernet Network
 Telematic Control and Communication with Industrial Robot over Ethernet Network M.W. Abdullah*, H. Roth, J. Wahrburg Institute of Automatic Control Engineering University of Siegen Siegen, Germany *abdullah@zess.uni-siegen.de
Telematic Control and Communication with Industrial Robot over Ethernet Network M.W. Abdullah*, H. Roth, J. Wahrburg Institute of Automatic Control Engineering University of Siegen Siegen, Germany *abdullah@zess.uni-siegen.de
Chapter 2 Mechatronics Disrupted
 Chapter 2 Mechatronics Disrupted Maarten Steinbuch 2.1 How It Started The field of mechatronics started in the 1970s when mechanical systems needed more accurate controlled motions. This forced both industry
Chapter 2 Mechatronics Disrupted Maarten Steinbuch 2.1 How It Started The field of mechatronics started in the 1970s when mechanical systems needed more accurate controlled motions. This forced both industry
Efficient complete machining
 K 110 / K 130 / K 150 / KR 150 Efficient complete machining P-SERIES K-SERIES T-SERIES MILLFORCE 02 / Fields of application 03 / Machine concept 04 / Machine technology 05 / Options and equipment variants
K 110 / K 130 / K 150 / KR 150 Efficient complete machining P-SERIES K-SERIES T-SERIES MILLFORCE 02 / Fields of application 03 / Machine concept 04 / Machine technology 05 / Options and equipment variants
FLOOR TYPE MILLING-BORING CENTRE
 FP FLOOR TYPE MILLING-BORING CENTRE FP FLOOR TYPE MILLING-BORING CENTRE MULTI-PURPOSE MILLING AND BORING MACHINE IMPROVED FLEXIBILITY AND DYNAMICS High performance and productivity FP FLOOR TYPE MILLING-BORING
FP FLOOR TYPE MILLING-BORING CENTRE FP FLOOR TYPE MILLING-BORING CENTRE MULTI-PURPOSE MILLING AND BORING MACHINE IMPROVED FLEXIBILITY AND DYNAMICS High performance and productivity FP FLOOR TYPE MILLING-BORING
How To Create The Right Collaborative System For Your Application. Corey Ryan Manager - Medical Robotics KUKA Robotics Corporation
 How To Create The Right Collaborative System For Your Application Corey Ryan Manager - Medical Robotics KUKA Robotics Corporation C Definitions Cobot: for this presentation a robot specifically designed
How To Create The Right Collaborative System For Your Application Corey Ryan Manager - Medical Robotics KUKA Robotics Corporation C Definitions Cobot: for this presentation a robot specifically designed
CamGrind S. Key data. Small and versatile. A member of the UNITED GRINDING Group
 A member of the UNITED GRINDING Group Small and versatile Key data The allows you to grind shaft-type workpieces with a length of up to 650 mm. This small, versatile grinding machine guarantees high-precision
A member of the UNITED GRINDING Group Small and versatile Key data The allows you to grind shaft-type workpieces with a length of up to 650 mm. This small, versatile grinding machine guarantees high-precision
Advanced Motion Control Optimizes Laser Micro-Drilling
 Advanced Motion Control Optimizes Laser Micro-Drilling The following discussion will focus on how to implement advanced motion control technology to improve the performance of laser micro-drilling machines.
Advanced Motion Control Optimizes Laser Micro-Drilling The following discussion will focus on how to implement advanced motion control technology to improve the performance of laser micro-drilling machines.
SEMI MAGNETIC ABRASIVE MACHINING
 4 th International Conference on Mechanical Engineering, December 26-28, 21, Dhaka, Bangladesh/pp. V 81-85 SEMI MAGNETIC ABRASIVE MACHINING P. Jayakumar Priyadarshini Engineering College, Vaniyambadi 635751.
4 th International Conference on Mechanical Engineering, December 26-28, 21, Dhaka, Bangladesh/pp. V 81-85 SEMI MAGNETIC ABRASIVE MACHINING P. Jayakumar Priyadarshini Engineering College, Vaniyambadi 635751.
Gear Shaping Machines. P 800 S to P 3200 S and P 800 ES to P 1200/1600 ES K E E P I N G T H E W O R L D I N M O T I O N TM
 Gear Shaping Machines P 800 S to P 3200 S and P 800 ES to P 1200/1600 ES K E E P I N G T H E W O R L D I N M O T I O N TM machine concept New-generation Shaping Machines for large gears: fast, flexible,
Gear Shaping Machines P 800 S to P 3200 S and P 800 ES to P 1200/1600 ES K E E P I N G T H E W O R L D I N M O T I O N TM machine concept New-generation Shaping Machines for large gears: fast, flexible,
All theses offered at MERLIN (November 2017)
") All theses offered at MERLIN (November 2017) MSc theses at Politecnico di Milano Thesis with reviewer Thesis without reviewer ( tesina ) Expected effort 6 months full time 3 4 months full time Reviewer
All theses offered at MERLIN (November 2017) MSc theses at Politecnico di Milano Thesis with reviewer Thesis without reviewer ( tesina ) Expected effort 6 months full time 3 4 months full time Reviewer
Integrated Strategies for High Performance Peripheral Milling
 Integrated Strategies for High Performance Peripheral Milling Law, M. 1, *, Wabner, M. 2 and Ihlenfeldt, S. 3 Fraunhofer Institute for Machine Tools and Forming Technology IWU, Reichenhainer Str. 88, 09126
Integrated Strategies for High Performance Peripheral Milling Law, M. 1, *, Wabner, M. 2 and Ihlenfeldt, S. 3 Fraunhofer Institute for Machine Tools and Forming Technology IWU, Reichenhainer Str. 88, 09126
Optimizing vibration assisted drilling
 Optimizing vibration assisted drilling Cutting force measurement leads to sophisticated machining processes MITIS relies on force dynamometer from Kistler Fig. 1: Cutting Force Dynamometer 9255C Process
Optimizing vibration assisted drilling Cutting force measurement leads to sophisticated machining processes MITIS relies on force dynamometer from Kistler Fig. 1: Cutting Force Dynamometer 9255C Process
What is the CONTINUOUS DUTY (S1) power rating of the spindle? What is the CONTINUOUS DUTY (S1) torque rating of the spindle?
 power rating of the spindle? What is the CONTINUOUS DUTY (S1) torque rating of the spindle?") Today there is a wide variety of CNC dental machining centers available to suite a variety of needs and choosing the right one for you can seem to be a daunting task. Knowing the construction characteristics
Today there is a wide variety of CNC dental machining centers available to suite a variety of needs and choosing the right one for you can seem to be a daunting task. Knowing the construction characteristics