Integrated Quality Indicators and Stochastic Modelling for Real-Time Positioning: Overview and Implementation
|
|
|
- Norman Oscar George
- 6 years ago
- Views:
Transcription

1 Integrated Quality Indicators and Stochastic Modelling for Real-Time Positioning: Overview and Implementation Simon FULLER, Eldar RUBINOV, Philip COLLIER and James SEAGER, Australia Keywords: Real-Time, Quality Control, Integrated Indicator, Stochastic Modelling. SUMMARY In the last decade the use of high precision Global Navigational Satellite Systems (GNSS) has increased markedly and the range of user applications has grown well beyond the traditional domain of surveying and engineering. This growth has been facilitated by the establishment of Continuously Operating Reference Station (CORS) networks and a new form of positioning known as Network Real-Time Kinematic (NRTK). However, the growth in the range of user applications has brought with it some interesting challenges for equipment manufacturers, software developers, and providers of NRTK services. One such challenge is ensuring that the quality of positioning consistently satisfies the demands of the customer. Currently there is nor reliable, nor readily available, quality indicator that can inform users as to the quality of their positioning. A further shortcoming in NRTK positioning is that the stochastic models employed are generally simplistic and overly optimistic. The consequence is that often the precision of NRTK coordinates is incorrectly estimated, leading to a false sense of user confidence. There is a considerable scope to improve the stochastic model and its ability to accurately reflect the quality of the raw GNSS observables. The research summarised here is concerned with the development of the Real-Time Quality Control (RTQC) system which aims to inform both users and providers of NRTK services of the quality, dependability, and fitness-for-purpose of their positioning in real time. This paper will present an overview of the system, concentrating on current research into the integration of mobile user s and CORS network data and the development of real-time stochastic models. 1/16
2 Integrated Quality Indicators and Stochastic Modelling for Real-Time Positioning: Overview and Implementation Simon FULLER, Eldar RUBINOV, Philip COLLIER and James SEAGER, Australia 1. INTRODUCTION The use of real time, high accuracy Global Navigational Satellite Systems (GNSS) has increased markedly in the last decade and the range of user applications has become increasingly diverse. This increase has been made possible by the rapid growth of Continuously Operating Reference Station (CORS) networks and a new form of positioning known as Network Real-Time Kinematic (NRTK), with achievable accuracies of 2-3cm. When utilising NRTK positioning, GNSS errors (such as ionospheric and tropospheric delay) are estimated at CORS sites and interpolated (in real time) for any location within the network (IAG, 2009). The availability of instantaneous, high accuracy positioning has driven the range of GNSS applications well beyond the traditional domain of surveying and engineering into fields such as precision agriculture, asset mapping, construction, mining, and so on. With an increasing level of high accuracy positioning applications, the number of critical decisions being made on the basis of positions derived from GNSS has also increased. Hence it is of growing importance to know that these derived positions are of high quality, dependable, and fit for purpose. For the purposes of this research quality refers to both the accuracy and precision of a computed position. A position is considered to be of high quality when it is both accurate and precise. GNSS position quality is dependent on two factors: the presence and magnitude of errors (both systematic and random) in the observations from which the position was derived, and the suitability of the functional model relating the observations to the computed position. The requirement for high quality, dependable positioning has placed an added responsibility on the suppliers of NRTK services to ensure that they can consistently satisfy user requirements. Currently there is no reliable, or readily available, quality indicator that can inform users and providers of NRTK services in real-time of the quality of their positioning. In most cases, the only information available is the quality indicator displayed by the GNSS receiver itself, usually in the form of a graphical error ellipse or a numerical figure comparable to a standard deviation. Such indicators are unreliable as they generally convey a measure of precision (e.g. standard deviation of the positioning solution), rather than a measure of absolute accuracy or quality. In practice, situations arise where the accuracy of the positioning solution is degraded, but the precision is unaffected. In such circumstances internal precision-based indicators fail to identify the problem. Hence, what is needed is an independent quality assessment procedure that will inform users as well CORS network operators of the quality of their positioning. It is in light of this growing need for an independent quality control system that the Cooperative Research Centre for Spatial Information (CRC-SI) has facilitated a project called Implementation 2/16
3 and Validation of Real-Time Quality Control for CORS Networks and Mobile Users (CRC-SI, 2009). The primary goal of the project is to develop and implement a robust, independent, realtime system that will inform users and CORS operators of the quality, dependability, and fitnessfor-purpose of NRTK positioning results. The system, dubbed the Real-Time Quality Control (RTQC) system is unique in that the quality control computations are performed and reported in real-time and the quality control process integrates CORS and mobile data. Although options exist to perform quality control analysis in a post-processed mode, no such options are available in real-time nor are they independent of proprietary algorithms. Several key factors influenced the development of the RTQC system. One of these factors was that the quality control computations should be based on raw observations rather than derived products such as positions, variance/covariance matrices, residuals, and so on. This approach is flexible, powerful, and independent of manufacturer-specific algorithms and applications. Another key driver behind the RTQC software was the objective to replace the plethora of quality indicators currently available with a single all-encompassing quality indicator. This quality indicator is derived from raw observation data for each satellite/receiver combination and is indicative of the level of noise present in the observations. A single, receiver-based, quality indicator is then derived from a combination of the individual satellite/receiver indicators. For stationary receivers (e.g. CORS receivers) this receiver-based indicator is used to test the quality of positioning data. For mobile users (e.g. NRTK rovers), an integrated quality indicator is used, which takes into account the quality of the user s data as well as the quality of the reference stations upon which the user s positioning is based. The basic design of the RTQC system is shown in Figure 1. The system is composed of three modules: RTQC CORS, RTQC Mobile, and RTQC Premium. Raw observations are streamed from both the CORS network and mobile users into the RTQC Hub where the quality of the observations is assessed using the RTQC CORS and RTQC Mobile modules respectively. Two separate modules are necessary due to the fact that the CORS stations are stationary and significant volumes of historical data exist to aid in the quality assessment process. The same will not generally be true of mobile users, making the quality assessment process somewhat different and more technically challenging. 3/16
 will be examined.")
4 4/16 Figure 1: The RTQC System For a complete overview of the RTQC system see Fuller et al (2007). This paper will focus on providing an insight into some of the unique aspects of the RTQC system. Firstly, the computation of quality control indicators that integrate CORS and mobile user quality information (integrated quality indicators) will be examined. Secondly, the real time delivery of quality information, including integrated quality indicators and stochastic models, will be discussed. Finally, the potential use of RTQC quality indicators as the basis of a new real time stochastic model will be explored. 2. INTEGRATED QUALITY INDICATORS One of the unique aspects of the RTQC system is the integration of CORS and mobile user quality information to provide more realistic and reliable indicators of position quality. To obtain high accuracy real time GNSS positions NRTK users rely upon data from several CORS stations. Thus the mobile user's position quality is intrinsically linked to the quality of the external data. Therefore, when utilising data from external sources, mobile users must be able to assess its quality and determine its fitness for use. At the same time it follows that providers of NRTK services must be able to deliver this information to mobile users in real-time. The challenge faced by the research team was to develop a methodology to integrate the two sets of quality information and deliver it to the mobile user. The approach taken in the RTQC system to this problem is shown in Figures 1 and 2. Raw observation data from the CORS sites and mobile users is streamed to the RTQC Hub, where quality indicators are calculated satellite-by-satellite for each CORS site and each mobile user (RTQC CORS and RTQC Mobile in Figure 1). These individual indicators are aggregated to provide a single quality indicator for each receiver (CORS and Mobile), at which point they are
 begins with the individual satellite-by-satellite quality indicators, denoted by")
5 submitted to the RTQC Premium module for the computation of an integrated quality indicator (Figure 2). Figure 2: Integrated Quality Indicator Hierarchy Computation of the integrated quality indicator (within RTQC Premium) begins with the individual satellite-by-satellite quality indicators, denoted by q. Whilst the derivation of q is outside the scope of this paper it is worthwhile stating that q is representative of the level of noise in the raw observation data. A single quality indicator for each receiver is determined from the individual quality indicators as follows: (1) Where w is the receiver-based indicator, is the satellite-by-satellite quality indicator for satellite i, and are the mean and the standard deviation of respectively, and n is the number of satellites. It can be seen from Equation (1) that the receiver-based indicator is the average of the individual satellite-by-satellite quality indicators. Thus, w is akin to the global test statistic used in least squares analysis to test the overall validity of an adjustment. Here it is used to describe the validity of all the data observed at a single receiver. In fact, both q and w are the subject of epoch-by-epoch statistical testing within the RTQC system to determine if they are significantly 5/16
6 different from previous epochs of data, this testing forms the basis of the RTQC alerting system detailed in Fuller et al (2008). The approach taken to determine w is identical for both CORS and mobile receivers, however the data used to calculate the statistical information ( and ) is different. Significant amounts of historical data are collected by the RTQC system for CORS receivers and these data are utilised in the calculation of and. A detailed discussion on the use of historical data for quality control purposes can be found in Fuller et al (2008). In the case of the mobile receiver only the recent history (e.g. the previous fifteen minutes of data) is available for the calculation of and. The final step in the computation of the integrated quality indicator ( is to combine the receiver-based indicators (w) from the CORS and mobile receivers (Figure 2). The basic logic of network positioning (e.g. NRTK) dictates that CORS sites close to the mobile receiver have the greatest influence on the positioning solution. It follows that similar logic should be applied in the computation of, as it is primarily intended for use with network positioning. To reflect this concept the calculation of is carried out in two parts: (2) (3) Where is the distance between the mobile user and the i th CORS site, is an inverse distance dependent weighting factor for the i th CORS site, is the receiver-based quality indicator for the i th CORS site, is the weighted mean of all CORS quality indicators, and is the receiver-based quality indicator for the mobile user. Note that, whilst in theory could be zero this is avoided in the practical implementation through appropriate checks. Equation (2) combines the quality indicator at each CORS site using a distance-dependent weighted mean. Only those CORS sites used to compute the mobile user s position are included in the calculation. If information on which CORS sites have been used in the network solution is not available, the four closest stations are used by default. Distance-dependent weighting was chosen in the first instance as it is a simple, easy to implement, technique that is used in network solutions (Gao et al, 1997; Fotopoulus and Cannon, 2001; Dai et al, 2004). is merged with to produce the integrated quality indicator ( ). Currently, this integration step (Equation 3) is quite simplistic and the relative weightings of the mobile and 6/16 (4)

7 CORS components require further investigation. The initial weightings were chosen to reflect the perception that CORS data is generally of a higher quality than mobile user data. It is anticipated that the larger contribution from will help to smooth the more volatile mobile user data without diminishing the ability of the integrated quality indicator to detect poor quality data. Figure 3 shows an example integrated quality indicator for a rover receiver and 3 CORS sites. Once is computed it needs to be delivered to the mobile user in real-time. The procedure for delivering this information to mobile users in real-time is described in Section 3. Figure 3: RTQC Quality Indicator 3. DELIVERING INTEGRATED QUALITY INDICATORS IN REAL-TIME Early in the development of the RTQC system a choice had to be made as to which format to use for all real time communications between users and the RTQC Hub. An incorrect choice of format could potentially limit the information that could be transferred and have a negative impact on the efficiency of the system. The format had to be open (freely available for implementation), supported by all GNSS manufacturers, and contain all the raw data messages needed for RTQC quality computations. It was determined that the most appropriate format was the Radio Technical Commission for Maritime Services (RTCM) Version 3.x. RTCM Version 3.0 was released in 2004 with an emphasis on supporting GNSS RTK operations, which made it an ideal choice to use with RTQC. The latest version of the standard, RTCM Version 3.1, was released in 2006 to incorporate the messages for GNSS Network corrections (RTCM, 2006). RTCM 3.1 contains a set of standard messages as well as a reserved set of messages for proprietary vendor data. In RTCM 3.1 message identifiers 4001 through 4095 have been reserved for vendor use, and vendors are able to apply for a specific RTCM 3.1 message identifier. A vendor can obtain only one message identifier, but is free to define sub messages within the assigned message. CRC-SI made an application to the RTCM and was granted message identifier 4082 for the purposes of RTQC research. 7/16
8 The purpose of the RTCM 4082 message is to transmit the receiver-based quality indicators (CORS) and the integrated quality indicator for network position solutions. To achieve this several sub messages within the RTCM4082 message have been defined. The use of sub messages provides flexibility to further develop and refine messages as required, as well as the flexibility to introduce new messages in the future. Currently, the following RTCM4082 sub messages have been defined: Sub Message 0 Stream ID The Stream ID sub message is used to provide a text name and type (rover or base) for a data stream. It is intended to be transmitted at a lower frequency (e.g. every 10 seconds) than the quality messages in order to conserve bandwidth. Table 1: Stream ID Message Structure Field description Data size and type Message number (4082) 12 bit unsigned integer Sub message number (0) 8 bit unsigned integer Sub message version (0) 4 bit unsigned integer Stream type 1 bit, base = 0, rover = 1 Stream identifier 8 bit unsigned integer Name size 7 bit unsigned integer Stream name Name size characters (128 maximum) Sub Message 1 Receiver-based Quality Indicator The receiver-based quality indicator sub message is used to provide data quality information for a single data stream. This message is transmitted every second. Table 2: Receiver-Based Indicator Message Structure Field description Message number (4082) Sub message number (1) Sub message version (0) Stream identifier (from sub message 0) GPS second of week, milliseconds Quality indicator Data size and type 12 bit unsigned integer 8 bit unsigned integer 4 bit unsigned integer 8 bit unsigned integer 30 bit unsigned integer 16 bit unsigned integer Sub Message 2 - Integrated Quality Indicator 8/16
9 This sub message is used to provide integrated quality information for a mobile user based on a combination of receiver-based indicators from CORS sites and the mobile user s quality indicator. The process used to compute the integrated indicator is detailed in Section 2. This message is also transmitted every second. Table 3: Integrated Quality Message Structure Field description Message number (4082) Sub message number (2) Sub message version (0) No. streams used Stream identifier GPS second of week, milliseconds Integrated quality indicator Data size and type 12 bit unsigned integer 8 bit unsigned integer 4 bit unsigned integer 8 bit unsigned integer No. streams used x 8 bit unsigned integer 30 bit unsigned integer 16 bit unsigned integer In future the RTCM 4082 message will be expanded to include sub messages for the coefficients for a real-time stochastic model to assist with computing the final coordinates of the mobile receiver. Real-time stochastic model generation is a separate part of the project and will be discussed in the next section of the paper. 4. REAL-TIME STOCHASTIC MODEL GENERATION In addition to providing mobile users with a measure of positioning quality via the RTCM 4082 message, individual RTQC quality indicators (detailed in Section 2) are also being investigated for their potential application in the development of a real-time stochastic model. GNSS processing is based around the least squares algorithm and as such functional and stochastic models are required. The functional model describes the relationship between the observations and the unknown parameters, whilst the stochastic model describes the noise of the observations. The objective of the stochastic model is to further improve the precision of GNSS results and to provide a more reliable picture of the positioning quality. This is achieved by utilising the correct variance-covariance matrix of the observations in the least squares algorithm. The variances (diagonal components of the variance-covariance matrix) describe the statistical properties of individual observations, while the covariances (off-diagonal elements) describe the correlations between them (Tiberius et al, 1999). The covariance terms in the stochastic model are based on the physical correlations between measurements. The types of correlations that have been identified include spatial correlations (correlations between observations to different satellites for one observation type), temporal or time correlations (correlations between epochs for one satellite and one observation type) and cross-correlations (correlations between different observation types for a single satellite). Barnes 9/16
10 et al (1998) has shown that a fully populated variance-covariance matrix that accounts for spatial correlations significantly improves positioning results. Numerous researchers have concentrated on detecting and modeling temporal correlations (El-Rabbany 1994; Schwieger 2001; Tiberius et al 1999; Tiberius and Kenselaar 2003) whilst Bona (2000) investigated cross correlations by means of variance component estimation. Finally, Leandro and Santos (2007) have proposed an empirical approach to building a variance covariance matrix by means of a stochastic analysis of raw observation data. Another approach which offers a more rigorous solution to the problem of stochastic model generation is a least squares estimation technique known as Minimum Norm Quadratic Unbiased Estimation (MINQUE) developed by Rao (1971) and utilised for static baseline processing by Wang (1998). The basis of this approach is the estimation of every element in the a priori variance-covariance matrix from the a posteriori observation residuals. Due to the recursive nature of this technique it can be incorporated into a Kalman filter or a sequential least squares adjustment (Kim and Langley, 2001). The problem with MINQUE and similar approaches is that they are computationally intensive and dependent upon the understanding of the functional model, which is generally proprietary. As such, these techniques are difficult to implement and not suited for real-time use. Despite the research conducted in this area, the stochastic model is not sufficiently understood and as a result simplistic stochastic models are still being used by the GNSS community. Models that are primarily used in practice are the elevation angle dependent model where the variances are assigned on the basis of satellite elevation, (Euler and Goad, 1991; Jin, 1996) and the Carrierto-Noise (C/N 0 ) ratio model where the variances are determined based on the C/N 0 values measured directly by most geodetic grade receivers (Langley, 1997; Hartinger and Brunner, 1999). The problem with such models is that only the variances of individual measurements are considered, the covariance terms are largely ignored, leading to overly optimistic estimates of positioning quality. The RTQC research team is attempting to address the shortcomings of current approaches through the development of a new real-time stochastic model. The basis for the new model is the individual satellite-by-satellite RTQC quality indicator. As noted previously, individual quality indicators represent the level of noise in the observations and as such contain stochastic properties which can be used in the development of a stochastic model. Particular emphasis is placed on generating a fully populated variance-covariance matrix, which is illustrated in Figure 4. It is obvious from Figure 4 that the temporal correlations have a significant impact on the overall size of the variance-covariance matrix. Thus the size of the time correlation window (1, 2, 3,, n epochs) emerges as an important consideration because if the size of the matrix becomes too large, it will be difficult to compute in real-time. 10/16

11 11/16 Figure 4: Variance-Covariance Matrix At this stage only the spatial correlations within a single epoch have been investigated by the research team and the results are presented below. Temporal and cross correlations have not been investigated by the research team thus far. As such, this analysis is concerned with a particular subset of the full variance-covariance matrix (Figure 4), being the variances of the individual satellites (,, ) and the covariances between them ( ), as shown in Equation (5). To examine the RTQC quality indicators for evidence of spatial correlations and determine their usefulness in computing covariance they were compared to more simplistic stochastic models. A five hour static data set was collected on the roof of the Geomatics building at the University of Melbourne with a recording interval of 1Hz. The receiver used for the experiment was a Leica GRX1200 with a Leica AX1202GG antenna. The collected data was used to generate individual quality indicators for each satellite and to calculate the C/N 0 stochastic model. Where represents the variance of satellite x for a particular observation type (e.g. L1 phase), represents the variance of satellite y for the same observation type, and represents the covariance between satellite x and satellite y for that observation type. Using the individual quality indicators it is possible to directly compute the variances and covariance for a pair of satellites, which in turn are used to compute the correlation co-efficient (Equation 6) for that satellite pair. The behaviour of the correlation co-efficient ( ) determines (5)
12 the presence (or absence) of correlation in the observations for the satellite pair. Values of -1 or 1 indicate perfect correlation whilst no correlation would be indicated by. (6) Where represents the correlation coefficient between x and y. Unfortunately, whilst the other stochastic models (elevation, C/N 0 ) provide a mechanism for computing the variances they ignore the covariance term. This would not be a problem if the objective was simply to compare the variances generated by the different models. However, the objective here is to determine if the quality indicators are spatially correlated and if they are useful in the calculation of covariances, through a comparison with existing stochastic models. This problem was resolved by examining the correlation between the observation noise (quantified by the variance terms and in Equation 6 available from all models), rather than the correlation between the observations themselves (only available in the RTQC model). This assumes that any correlation in the observation noise reflects correlation in the observations. The basis for this assumption is the knowledge that GNSS signals travelling along similar paths to the receiver experience similar effects with respect to systematic errors and noise. Thus, the observation noise for one satellite will behave in a similar fashion to that of a nearby satellite. When stated in this fashion the assumption seems counter-intuitive (how can one set of random noise behave similarly to another) but it is in fact the basis of many of the stochastic models used in practice, for example the elevation and C/N 0 models. Having established that examining the correlation between the observation noise of each satellite pair would provide an acceptable means to determine if there was correlation between the observation themselves the appropriate covariance and correlation co-efficient calculations were performed. The results of this analysis are shown in Figure 5 for four different pairs of satellites. 12/16
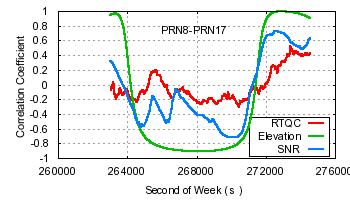
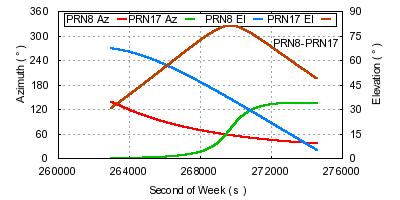





13 Figure 5: Correlation Coefficients with Azimuths and Elevations 13/16
14 It is immediately apparent from Figure 5 that, according to the elevation dependent stochastic model, there is significant correlation between the observation noise (and by association the observations themselves) for each pair of satellites. However, the results are misleading, as they show strong correlation ( ) in instances where the satellites are clearly in disparate regions of the sky (e.g. PRN 28 and PRN 26, PRN 8 and PRN 17). Whilst misleading this result is not unexpected, as the elevation dependent model relies solely on satellite elevation when calculating variances and therefore ignores any azimuthal effects. Furthermore, the simplistic modeling function utilised in the elevation dependent model produces variances that change smoothly over time, hence satellites that may not have same elevation, but are descending or ascending at similar rates will also show strong correlations. Overall the results from the elevation dependent model serve to highlight the need for a more realistic stochastic model. The results from the C/N 0 and RTQC models are more in line with expectations of how the correlation coefficients would behave, tending to reflect a lack of correlation ( ) when the satellites are in disparate regions of the sky. However, the influence of the satellite elevations, as opposed to azimuthal effects, is apparent in both models. Each satellite pair recorded an increase in correlation as the satellites descended, irrespective of azimuth (Figure 5), although the impact of this trend on the correlation coefficient depends on the respective elevations of the satellites (e.g. SV8 and SV17 show an increase, but the correlation remains small). The RTQC model appears more resilient to the effects of the elevation than the C/N 0 model as in all satellite pairs other than SV8 and SV11 the RTQC correlations rose slower and were of a smaller magnitude than those of the C/N 0 model (the exception being a short period at the end of SV28 and SV26). In this respect the RTQC model appears to provide a better representation of how we would expect the correlation to behave in reality. The correlations present in the observation noise when using the RTQC model (Figure 5) indicate that there will be correlation present in the individual quality indicators from which the model was generated. Given that there is correlation between the quality indicators it follows that they will be useful in the determination of covariance terms in a stochastic model. However, a number of issues are raised in this analysis that will require further investigation, firstly the effect of lower elevations on the RTQC correlations, for example the increase in the correlation seen in the SV8 and SV11 pair, an increase that appears to be driven by the low elevations of the satellites rather than their azimuths (it is also the only instance where the RTQC fails to outperform the C/N 0 model). Secondly, the sharp rise and fall of the correlation coefficient in the SV26 and SV28 pair around epoch remains unexplained. Ultimately, the stochastic model generated from RTQC will be implemented and tested within a Reverse RTK (RRTK) algorithm under development as part of CRC-SI Project Delivering Precise Positioning Services to Regional Areas. It is envisaged that the testing will be carried out in two stages, the initial stage will involve real-time network positioning using the RTQC stochastic model and the results (coordinates, precisions, quality indicators) compared to results obtained using current models. Secondly, the ability of the RTQC stochastic model to aid in ambiguity resolution will be examined, by comparing the performance of standard ambiguity resolution algorithms with the RTQC model and with existing models. 14/16
15 5. CONCLUSION The RTQC system was designed to quality control positioning results for CORS and mobile receivers in NRTK environments. An overview of the RTQC research with some current developments has been presented in this paper. Firstly an outline of the system was presented, followed by an explanation of how the RTQC system currently combines CORS and mobile user data to provide an integrated quality indicator and deliver this quality information to mobile users in real-time via the RTCM 4082 message. Finally the potential for using RTQC quality indicators in the development of a real-time stochastic model was explored. ACKNOWLEDGMENTS This work was conducted within the CRC for Spatial Information, established and supported under the Australian Government s Cooperative Research Centres Programme. The authors would like to thank the CRC for Spatial Information as well as the industry and government sponsors of the project for their on-going support. REFERENCES Barnes, J., Ackroyd, N. and Cross, P. (1998). Stochastic Modelling for Very High Precision Real- Time Kinematic GNSS in an Engineering Environment. In FIG XXI International Congress. Commission 6, Engineering Surveys, Brighton, UK. CRC-SI (2009). Cooperative Research Centre for Spatial Information, Project 1.12, (Assessed, December 2009) Dai, L., Han, S., Wang, J., Rizos, C. (2004). Comparison of Interpolation Techniques in Network-Based GPS Techniques. Navigation, 50(4): Euler, H. and Goad C. (1991). On Optimal Filtering of GPS Dual Frequency Observations without using Orbit Information. Bulletin Geodesique 65(2), Fotopoulus, G. and Cannon, M.E. (2001). An Overview of Multi-Reference Station Methods for cm-level Positioning. GPS Solutions, 4(3):1-10 Fuller S., Collier P.A., Seager J. (2007). Real-Time Quality Control for CORS Networks and Mobile Users, Proceedings of IGNSS Symposium 2007, Sydney, Australia. Fuller S., Collier P.A., Seager J. (2008). Assessing and Reporting Real-Time Data Quality for GNSS Reference Stations, Journal of Spatial Science, 53(2): Gao, Y., Li, Z., and McLellan, J. (1997). Carrier Phase Based Regional Area Di?erential GPS for Decimeter-Level Positioning and Navigation. Proceedings ION GPS 1997, pp , Kansas City, USA. 15/16
16 Hartinger, H. and Brunner, F.K. (1999). Variances of GPS Phase Observations: The SIGMA-ε Model. GPS Solutions 2(4), IAG (2009). International Association of Geodesy, Working Group Network RTK, (Assessed, June 2009). Jin, X.X. and de Jonge, C.D. (1996). Relationship Between Satellite Elevation and Precision of GPS Code Observations. Journal of Navigation 49(2), Kim, D. and Langley, R. B. (2001). Quality Control Techniques and Issues in GNSS Applications: Stochastic Modeling and Reliability Test. In International Symposium on GNSS/GNSS, Jeju Island, Korea. Langley, R. B. (1997). GPS Receiver System Noise. GPS World, 8, Rao, C. (1971). Estimation of Variance and Covariance Components MINQUE Theory. Journal of Multivariate Analysis 1, RTCM Standard for Differential GNSS Services Version 3 (2006). (Assessed, June 2009). Satirapod, C. and Wang, J. (2000). Comparing Quality Indicators of GNSS Carrier Phase Observations. Geomatics Research Australasia 73, Tiberius, C., Jonkman, N., and Kenselaar, F. (1999). The Stochastics of GPS observables. GPS World 10(2), Wang, J., Stewart, M. P. and Tsakiri M. (1998). Stochastic Modeling for Static GPS Baseline Data Processing. Journal of Surveying Engineering 124(4), CONTACTS Mr Simon Fuller (sfuller@thinkspatial.com.au) Cooperative Research Centre for Spatial Information, Melbourne, Australia Mr Eldar Rubinov (elrubinov@gmail.com) Cooperative Research Centre for Spatial Information, Melbourne, Australia Dr Philip Collier (p.collier@unimelb.edu.au) Cooperative Research Centre for Spatial Information, Melbourne, Australia Dr James Seager (jseager@seagis.com.au) SeaGIS Pty Ltd, Melbourne, Australia 16/16
Estimation of the Stochastic Model for Long- Baseline Kinematic GPS Applications
 Estimation of the Stochastic Model for Long- Baseline Kinematic GPS Applications Donghyun Kim and Richard B. Langley Geodetic Research Laboratory, Department of Geodesy and Geomatics Engineering, University
Estimation of the Stochastic Model for Long- Baseline Kinematic GPS Applications Donghyun Kim and Richard B. Langley Geodetic Research Laboratory, Department of Geodesy and Geomatics Engineering, University
Comparing the Quality Indicators of GPS Carrier Phase Observations. Chalermchon Satirapod Jinling Wang
 Comparing the Quality Indicators of GPS Carrier Phase Observations Chalermchon Satirapod Jinling Wang STRACT School of Geomatic Engineering The University of New South Wales Sydney NSW 5 Australia email:
Comparing the Quality Indicators of GPS Carrier Phase Observations Chalermchon Satirapod Jinling Wang STRACT School of Geomatic Engineering The University of New South Wales Sydney NSW 5 Australia email:
An improvement of GPS height estimations: stochastic modeling
 Earth Planets Space, 57, 253 259, 2005 An improvement of GPS height estimations: stochastic modeling Shuanggen Jin 1,2,3,J.Wang 2, and Pil-Ho Park 1 1 Space Geodesy Research Group, Korea Astronomy and
Earth Planets Space, 57, 253 259, 2005 An improvement of GPS height estimations: stochastic modeling Shuanggen Jin 1,2,3,J.Wang 2, and Pil-Ho Park 1 1 Space Geodesy Research Group, Korea Astronomy and
Some of the proposed GALILEO and modernized GPS frequencies.
 On the selection of frequencies for long baseline GALILEO ambiguity resolution P.J.G. Teunissen, P. Joosten, C.D. de Jong Department of Mathematical Geodesy and Positioning, Delft University of Technology,
On the selection of frequencies for long baseline GALILEO ambiguity resolution P.J.G. Teunissen, P. Joosten, C.D. de Jong Department of Mathematical Geodesy and Positioning, Delft University of Technology,
Geodetic Research Laboratory
 MEMORANDUM Date: 21/07/99 To: Cc: From: RE: Rock Santere Richard Langley Paul Collins & Peter Stewart GPS SNR Observations The following appendices represent our current knowledge on the reporting of signal-to-noise
MEMORANDUM Date: 21/07/99 To: Cc: From: RE: Rock Santere Richard Langley Paul Collins & Peter Stewart GPS SNR Observations The following appendices represent our current knowledge on the reporting of signal-to-noise
On the GNSS integer ambiguity success rate
 On the GNSS integer ambiguity success rate P.J.G. Teunissen Mathematical Geodesy and Positioning Faculty of Civil Engineering and Geosciences Introduction Global Navigation Satellite System (GNSS) ambiguity
On the GNSS integer ambiguity success rate P.J.G. Teunissen Mathematical Geodesy and Positioning Faculty of Civil Engineering and Geosciences Introduction Global Navigation Satellite System (GNSS) ambiguity
New Tools for Network RTK Integrity Monitoring
 New Tools for Network RTK Integrity Monitoring Xiaoming Chen, Herbert Landau, Ulrich Vollath Trimble Terrasat GmbH BIOGRAPHY Dr. Xiaoming Chen is a software engineer at Trimble Terrasat. He holds a PhD
New Tools for Network RTK Integrity Monitoring Xiaoming Chen, Herbert Landau, Ulrich Vollath Trimble Terrasat GmbH BIOGRAPHY Dr. Xiaoming Chen is a software engineer at Trimble Terrasat. He holds a PhD
Performance of Research-Based N-RTK Positioning System in ISKANDAR Malaysia
 1 International Symposium on GPS/GNSS October -8, 1. Performance of Research-Based N-RTK Positioning System in ISKANDAR Malaysia Shariff, N. S. M., Musa, T. A., Omar, K., Ses, S. and Abdullah, K. A. UTM-GNSS
1 International Symposium on GPS/GNSS October -8, 1. Performance of Research-Based N-RTK Positioning System in ISKANDAR Malaysia Shariff, N. S. M., Musa, T. A., Omar, K., Ses, S. and Abdullah, K. A. UTM-GNSS
Trimble Business Center:
 Trimble Business Center: Modernized Approaches for GNSS Baseline Processing Trimble s industry-leading software includes a new dedicated processor for static baselines. The software features dynamic selection
Trimble Business Center: Modernized Approaches for GNSS Baseline Processing Trimble s industry-leading software includes a new dedicated processor for static baselines. The software features dynamic selection
Performance Evaluation of Multiple Reference Station GPS RTK for a Medium Scale Network
 Journal of Global Positioning Systems (2004) Vol. 3, No. 12: 173182 Performance Evaluation of Multiple Reference Station GPS RTK for a Medium Scale Network T.H. Diep Dao, Paul Alves and Gérard Lachapelle
Journal of Global Positioning Systems (2004) Vol. 3, No. 12: 173182 Performance Evaluation of Multiple Reference Station GPS RTK for a Medium Scale Network T.H. Diep Dao, Paul Alves and Gérard Lachapelle
KALMAN-FILTER-BASED GPS AMBIGUITY RESOLUTION FOR REAL-TIME LONG-BASELINE KINEMATIC APPLICATIONS
 KALMAN-FILTER-BASED GPS AMBIGUITY RESOLUTION FOR REAL-TIME LONG-BASELINE KINEMATIC APPLICATIONS Donghyun Kim and Richard B. Langley Geodetic Research Laboratory, Department of Geodesy and Geomatics Engineering,
KALMAN-FILTER-BASED GPS AMBIGUITY RESOLUTION FOR REAL-TIME LONG-BASELINE KINEMATIC APPLICATIONS Donghyun Kim and Richard B. Langley Geodetic Research Laboratory, Department of Geodesy and Geomatics Engineering,
Journal of Global Positioning Systems
 Vol. 7, No. 2, 2008 Journal of Global Positioning Systems ISSN 1446-3156 (Print Version) ISSN 1446-3164 (CD-ROM Version) International Association of Chinese Professionals in Global Positioning Systems
Vol. 7, No. 2, 2008 Journal of Global Positioning Systems ISSN 1446-3156 (Print Version) ISSN 1446-3164 (CD-ROM Version) International Association of Chinese Professionals in Global Positioning Systems
A GLONASS Observation Message Compatible With The Compact Measurement Record Format
 A GLONASS Observation Message Compatible With The Compact Measurement Record Format Leica Geosystems AG 1 Introduction Real-time kinematic (RTK) Global Navigation Satellite System (GNSS) positioning has
A GLONASS Observation Message Compatible With The Compact Measurement Record Format Leica Geosystems AG 1 Introduction Real-time kinematic (RTK) Global Navigation Satellite System (GNSS) positioning has
Network RTK Quality Indication Using Linear Interpolation Residuals
 Network RTK Quality Indication Using Linear Interpolation Residuals September 2005 Published in proceedings of ION GNSS September 13-16, 2005, Long Beach, CA P. Alves, I. Geisler, N. Brown, J. Wirth, and
Network RTK Quality Indication Using Linear Interpolation Residuals September 2005 Published in proceedings of ION GNSS September 13-16, 2005, Long Beach, CA P. Alves, I. Geisler, N. Brown, J. Wirth, and
RTK Rover Performance using the Master- Auxiliary Concept
 RTK Rover Performance using the Master- Auxiliary Concept N. Brown, I. Geisler and L. Troyer Networked Reference Stations and Structural Monitoring Leica Geosystems, Heinrich-Wild-Strasse, Heerbrugg, 9435,
RTK Rover Performance using the Master- Auxiliary Concept N. Brown, I. Geisler and L. Troyer Networked Reference Stations and Structural Monitoring Leica Geosystems, Heinrich-Wild-Strasse, Heerbrugg, 9435,
Table of Contents. Frequently Used Abbreviation... xvii
 GPS Satellite Surveying, 2 nd Edition Alfred Leick Department of Surveying Engineering, University of Maine John Wiley & Sons, Inc. 1995 (Navtech order #1028) Table of Contents Preface... xiii Frequently
GPS Satellite Surveying, 2 nd Edition Alfred Leick Department of Surveying Engineering, University of Maine John Wiley & Sons, Inc. 1995 (Navtech order #1028) Table of Contents Preface... xiii Frequently
Rover Processing with Network RTK and
 Rover Processing with Network RTK and Quality Indicators P. Alves, H. Kotthoff, I. Geisler, O. Zelzer, and H.-J. Euler Leica Geosystems AG Heerbrugg, Switzerland BIOGRAPHIES Paul Alves graduated in 2005
Rover Processing with Network RTK and Quality Indicators P. Alves, H. Kotthoff, I. Geisler, O. Zelzer, and H.-J. Euler Leica Geosystems AG Heerbrugg, Switzerland BIOGRAPHIES Paul Alves graduated in 2005
RTK Rover Performance using the Master-Auxiliary Concept
 Journal of Global Positioning Systems (2006) Vol. 5, No. 1-2:135-144 RTK Rover Performance using the Master-Auxiliary Concept N. Brown, I. Geisler and L. Troyer Networked Reference Stations and Structural
Journal of Global Positioning Systems (2006) Vol. 5, No. 1-2:135-144 RTK Rover Performance using the Master-Auxiliary Concept N. Brown, I. Geisler and L. Troyer Networked Reference Stations and Structural
Detection and Mitigation of Static Multipath in L1 Carrier Phase Measurements Using a Dual- Antenna Approach
 Detection and Mitigation of Static Multipath in L1 Carrier Phase Measurements Using a Dual- Antenna Approach M.C. Santos Department of Geodesy and Geomatics Engineering, University of New Brunswick, P.O.
Detection and Mitigation of Static Multipath in L1 Carrier Phase Measurements Using a Dual- Antenna Approach M.C. Santos Department of Geodesy and Geomatics Engineering, University of New Brunswick, P.O.
Cycle Slip and Clock Jump Repair with Multi- Frequency Multi-Constellation GNSS data for Precise Point Positioning
 International Global Navigation Satellite Systems Society IGNSS Symposium 2015 Outrigger Gold Coast, Qld Australia 14-16 July, 2015 Cycle Slip and Clock Jump Repair with Multi- Frequency Multi-Constellation
International Global Navigation Satellite Systems Society IGNSS Symposium 2015 Outrigger Gold Coast, Qld Australia 14-16 July, 2015 Cycle Slip and Clock Jump Repair with Multi- Frequency Multi-Constellation
ProMark 3 RTK. White Paper
 ProMark 3 RTK White Paper Table of Contents 1. Introduction... 1 2. ProMark3 RTK Operational Environment... 2 3. BLADE TM : A Unique Magellan Technology for Quicker Convergence... 3 4. ProMark3 RTK Fixed
ProMark 3 RTK White Paper Table of Contents 1. Introduction... 1 2. ProMark3 RTK Operational Environment... 2 3. BLADE TM : A Unique Magellan Technology for Quicker Convergence... 3 4. ProMark3 RTK Fixed
Improved Ambiguity Resolution by an Equatorial Ionospheric Differential Correction for Precise Positioning
 Improved Ambiguity Resolution by an Equatorial Ionospheric Differential Correction for Precise Positioning NORSUZILA YA ACOB 1, MARDINA ABDULLAH,* MAHAMOD ISMAIL,* AND AZAMI ZAHARIM 3,** 1 Faculty of Electrical
Improved Ambiguity Resolution by an Equatorial Ionospheric Differential Correction for Precise Positioning NORSUZILA YA ACOB 1, MARDINA ABDULLAH,* MAHAMOD ISMAIL,* AND AZAMI ZAHARIM 3,** 1 Faculty of Electrical
Introduction to GNSS Base-Station
 Introduction to GNSS Base-Station Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp Slide : 1 Introduction GPS or GNSS observation
Introduction to GNSS Base-Station Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp Slide : 1 Introduction GPS or GNSS observation
Ionospheric Correction and Ambiguity Resolution in DGPS with Single Frequency
 Applied Physics Research November, 9 Ionospheric Correction and Ambiguity Resolution in DGPS with Single Frequency Norsuzila Ya acob Department of Electrical, Electronics and Systems Engineering Universiti
Applied Physics Research November, 9 Ionospheric Correction and Ambiguity Resolution in DGPS with Single Frequency Norsuzila Ya acob Department of Electrical, Electronics and Systems Engineering Universiti
Performances of Modernized GPS and Galileo in Relative Positioning with weighted ionosphere Delays
 Agence Spatiale Algérienne Centre des Techniques Spatiales Agence Spatiale Algérienne Centre des Techniques Spatiales الوكالة الفضائية الجزائرية مركز للتقنيات الفضائية Performances of Modernized GPS and
Agence Spatiale Algérienne Centre des Techniques Spatiales Agence Spatiale Algérienne Centre des Techniques Spatiales الوكالة الفضائية الجزائرية مركز للتقنيات الفضائية Performances of Modernized GPS and
Carrier Phase Multipath Corrections Based on GNSS Signal Quality Measurements to Improve CORS Observations
 Carrier Phase Multipath Corrections Based on GNSS Signal Quality Measurements to Improve CORS Observations Christian Rost and Lambert Wanninger Geodetic Institute Technische Universität Dresden Dresden,
Carrier Phase Multipath Corrections Based on GNSS Signal Quality Measurements to Improve CORS Observations Christian Rost and Lambert Wanninger Geodetic Institute Technische Universität Dresden Dresden,
SUPPORT OF NETWORK FORMATS BY TRIMBLE GPSNET NETWORK RTK SOLUTION
 SUPPORT OF NETWORK FORMATS BY TRIMBLE GPSNET NETWORK RTK SOLUTION TRIMBLE TERRASAT GMBH, HARINGSTRASSE 19, 85635 HOEHENKIRCHEN, GERMANY STATUS The Trimble GPSNet network RTK solution was first introduced
SUPPORT OF NETWORK FORMATS BY TRIMBLE GPSNET NETWORK RTK SOLUTION TRIMBLE TERRASAT GMBH, HARINGSTRASSE 19, 85635 HOEHENKIRCHEN, GERMANY STATUS The Trimble GPSNet network RTK solution was first introduced
ProMark 500 White Paper
 ProMark 500 White Paper How Magellan Optimally Uses GLONASS in the ProMark 500 GNSS Receiver How Magellan Optimally Uses GLONASS in the ProMark 500 GNSS Receiver 1. Background GLONASS brings to the GNSS
ProMark 500 White Paper How Magellan Optimally Uses GLONASS in the ProMark 500 GNSS Receiver How Magellan Optimally Uses GLONASS in the ProMark 500 GNSS Receiver 1. Background GLONASS brings to the GNSS
Integer Ambiguity Resolution for Precise Point Positioning Patrick Henkel
 Integer Ambiguity Resolution for Precise Point Positioning Patrick Henkel Overview Introduction Sequential Best-Integer Equivariant Estimation Multi-frequency code carrier linear combinations Galileo:
Integer Ambiguity Resolution for Precise Point Positioning Patrick Henkel Overview Introduction Sequential Best-Integer Equivariant Estimation Multi-frequency code carrier linear combinations Galileo:
POSSIBLE WEIGHTING SCHEMES
 POSSIBLE WEIGHTING SCHEMES FOR GPS CARRIER PHASE OBSERVATIONS IN THE PRESENCE OF MULTIPATH by J. P. Collins and R. B. Langley Geodetic Research Laboratory Department of Geodesy and Geomatics Engineering
POSSIBLE WEIGHTING SCHEMES FOR GPS CARRIER PHASE OBSERVATIONS IN THE PRESENCE OF MULTIPATH by J. P. Collins and R. B. Langley Geodetic Research Laboratory Department of Geodesy and Geomatics Engineering
Cycle slip detection using multi-frequency GPS carrier phase observations: A simulation study
 Available online at www.sciencedirect.com Advances in Space Research 46 () 44 49 www.elsevier.com/locate/asr Cycle slip detection using multi-frequency GPS carrier phase observations: A simulation study
Available online at www.sciencedirect.com Advances in Space Research 46 () 44 49 www.elsevier.com/locate/asr Cycle slip detection using multi-frequency GPS carrier phase observations: A simulation study
REAL-TIME GPS ATTITUDE DETERMINATION SYSTEM BASED ON EPOCH-BY-EPOCH TECHNOLOGY
 REAL-TIME GPS ATTITUDE DETERMINATION SYSTEM BASED ON EPOCH-BY-EPOCH TECHNOLOGY Dr. Yehuda Bock 1, Thomas J. Macdonald 2, John H. Merts 3, William H. Spires III 3, Dr. Lydia Bock 1, Dr. Jeffrey A. Fayman
REAL-TIME GPS ATTITUDE DETERMINATION SYSTEM BASED ON EPOCH-BY-EPOCH TECHNOLOGY Dr. Yehuda Bock 1, Thomas J. Macdonald 2, John H. Merts 3, William H. Spires III 3, Dr. Lydia Bock 1, Dr. Jeffrey A. Fayman
GNSS Technologies. PPP and RTK
 PPP and RTK 29.02.2016 Content Carrier phase based positioning PPP RTK VRS Slides based on: GNSS Applications and Methods, by S. Gleason and D. Gebre-Egziabher (Eds.), Artech House Inc., 2009 http://www.gnssapplications.org/
PPP and RTK 29.02.2016 Content Carrier phase based positioning PPP RTK VRS Slides based on: GNSS Applications and Methods, by S. Gleason and D. Gebre-Egziabher (Eds.), Artech House Inc., 2009 http://www.gnssapplications.org/
SENSORS SESSION. Operational GNSS Integrity. By Arne Rinnan, Nina Gundersen, Marit E. Sigmond, Jan K. Nilsen
 Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE 11-12 October, 2011 SENSORS SESSION By Arne Rinnan, Nina Gundersen, Marit E. Sigmond, Jan K. Nilsen Kongsberg Seatex AS Trondheim,
Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE 11-12 October, 2011 SENSORS SESSION By Arne Rinnan, Nina Gundersen, Marit E. Sigmond, Jan K. Nilsen Kongsberg Seatex AS Trondheim,
Performance Evaluation of the Effect of QZS (Quasi-zenith Satellite) on Precise Positioning
 on Precise Positioning") Performance Evaluation of the Effect of QZS (Quasi-zenith Satellite) on Precise Positioning Nobuaki Kubo, Tomoko Shirai, Tomoji Takasu, Akio Yasuda (TUMST) Satoshi Kogure (JAXA) Abstract The quasi-zenith
Performance Evaluation of the Effect of QZS (Quasi-zenith Satellite) on Precise Positioning Nobuaki Kubo, Tomoko Shirai, Tomoji Takasu, Akio Yasuda (TUMST) Satoshi Kogure (JAXA) Abstract The quasi-zenith
Network Differential GPS: Kinematic Positioning with NASA s Internet-based Global Differential GPS
 Journal of Global Positioning Systems () Vol., No. : 9-4 Network Differential GPS: Kinematic Positioning with NASA s Internet-based Global Differential GPS M. O. Kechine, C.C.J.M.Tiberius, H. van der Marel
Journal of Global Positioning Systems () Vol., No. : 9-4 Network Differential GPS: Kinematic Positioning with NASA s Internet-based Global Differential GPS M. O. Kechine, C.C.J.M.Tiberius, H. van der Marel
MULTIPATH MITIGATION BY WAVELET ANALYSIS FOR GPS BASE STATION APPLICATIONS
 MULTIPATH MITIGATION BY WAVELET ANALYSIS FOR GPS BASE STATION APPLICATIONS Chalermchon Satirapod 1 and Chris Rizos 2 1 Geo-Image Technology Research Unit Department of Survey Engineering Chulalongkorn
MULTIPATH MITIGATION BY WAVELET ANALYSIS FOR GPS BASE STATION APPLICATIONS Chalermchon Satirapod 1 and Chris Rizos 2 1 Geo-Image Technology Research Unit Department of Survey Engineering Chulalongkorn
Chapter 4 SPEECH ENHANCEMENT
 44 Chapter 4 SPEECH ENHANCEMENT 4.1 INTRODUCTION: Enhancement is defined as improvement in the value or Quality of something. Speech enhancement is defined as the improvement in intelligibility and/or
44 Chapter 4 SPEECH ENHANCEMENT 4.1 INTRODUCTION: Enhancement is defined as improvement in the value or Quality of something. Speech enhancement is defined as the improvement in intelligibility and/or
Precise Positioning with NovAtel CORRECT Including Performance Analysis
 Precise Positioning with NovAtel CORRECT Including Performance Analysis NovAtel White Paper April 2015 Overview This article provides an overview of the challenges and techniques of precise GNSS positioning.
Precise Positioning with NovAtel CORRECT Including Performance Analysis NovAtel White Paper April 2015 Overview This article provides an overview of the challenges and techniques of precise GNSS positioning.
Real-Time Processing Strategies
 Publikation_en_Sept_2001 30.11.2001 14:08 Uhr Seite 1 30 40 50 Real-Time Processing Strategies Study of Improved Observation Modeling for Surveying Type Applications in Multipath Environment Bernhard Richter
Publikation_en_Sept_2001 30.11.2001 14:08 Uhr Seite 1 30 40 50 Real-Time Processing Strategies Study of Improved Observation Modeling for Surveying Type Applications in Multipath Environment Bernhard Richter
UCGE Reports Number 20054
 UCGE Reports Number 20054 Department of Geomatics Engineering An Analysis of Some Critical Error Sources in Static GPS Surveying (URL: http://www.geomatics.ucalgary.ca/links/gradtheses.html) by Weigen
UCGE Reports Number 20054 Department of Geomatics Engineering An Analysis of Some Critical Error Sources in Static GPS Surveying (URL: http://www.geomatics.ucalgary.ca/links/gradtheses.html) by Weigen
Asian Journal of Science and Technology Vol. 08, Issue, 11, pp , November, 2017 RESEARCH ARTICLE
 Available Online at http://www.journalajst.com ASIAN JOURNAL OF SCIENCE AND TECHNOLOGY ISSN: 0976-3376 Asian Journal of Science and Technology Vol. 08, Issue, 11, pp.6697-6703, November, 2017 ARTICLE INFO
Available Online at http://www.journalajst.com ASIAN JOURNAL OF SCIENCE AND TECHNOLOGY ISSN: 0976-3376 Asian Journal of Science and Technology Vol. 08, Issue, 11, pp.6697-6703, November, 2017 ARTICLE INFO
Performance Analysis of GPS Integer Ambiguity Resolution Using External Aiding Information
 Journal of Global Positioning Systems (2005) Vol. 4, No. 1-2: 201-206 Performance Analysis of GPS Integer Ambiguity Resolution Using External Aiding Information Sebum Chun, Chulbum Kwon, Eunsung Lee, Young
Journal of Global Positioning Systems (2005) Vol. 4, No. 1-2: 201-206 Performance Analysis of GPS Integer Ambiguity Resolution Using External Aiding Information Sebum Chun, Chulbum Kwon, Eunsung Lee, Young
Latest Developments in Network RTK Modeling to Support GNSS Modernization
 Journal of Global Positioning Systems (2007) Vol.6, No.1: 47-55 Latest Developments in Network RTK Modeling to Support GNSS Modernization Herbert Landau, Xiaoming Chen, Adrian Kipka, Ulrich Vollath Trimble
Journal of Global Positioning Systems (2007) Vol.6, No.1: 47-55 Latest Developments in Network RTK Modeling to Support GNSS Modernization Herbert Landau, Xiaoming Chen, Adrian Kipka, Ulrich Vollath Trimble
Real-time RTK messages for permanent reference station applications standardized by RTCM. Dr.-Ing. Hans-Juergen Euler Leica Research Fellow
 Real-time RTK messages for permanent reference station applications standardized by RTCM Dr.-Ing. Hans-Juergen Euler Leica Research Fellow Permanent Station Arrays Arrays with Permanent Stations are established
Real-time RTK messages for permanent reference station applications standardized by RTCM Dr.-Ing. Hans-Juergen Euler Leica Research Fellow Permanent Station Arrays Arrays with Permanent Stations are established
Application of GNSS Methods for Monitoring Offshore Platform Deformation
 Application of GNSS Methods for Monitoring Offshore Platform Deformation Khin Cho Myint 1,*, Abd Nasir Matori 1, and Adel Gohari 1 1 Department of Civil and Environmental Engineering, Universiti Teknologi
Application of GNSS Methods for Monitoring Offshore Platform Deformation Khin Cho Myint 1,*, Abd Nasir Matori 1, and Adel Gohari 1 1 Department of Civil and Environmental Engineering, Universiti Teknologi
Improving the GPS Data Processing Algorithm for Precise Static Relative Positioning
 Improving the GPS Data Processing Algorithm for Precise Static Relative Positioning by Chalermchon Satirapod BEng, Chulalongkorn University, Bangkok, Thailand, 1994 MEng, Chulalongkorn University, Bangkok,
Improving the GPS Data Processing Algorithm for Precise Static Relative Positioning by Chalermchon Satirapod BEng, Chulalongkorn University, Bangkok, Thailand, 1994 MEng, Chulalongkorn University, Bangkok,
GAVIN DOCHERTY & CRAIG ROBERTS School of Surveying & Spatial Information Systems. University of NSW
 FIG2010, Sydney, Australia 15 April 2010 The impact of Solar Cycle 24 on Network RTK in Australia GAVIN DOCHERTY & CRAIG ROBERTS School of Surveying & Spatial Information Systems University of NSW School
FIG2010, Sydney, Australia 15 April 2010 The impact of Solar Cycle 24 on Network RTK in Australia GAVIN DOCHERTY & CRAIG ROBERTS School of Surveying & Spatial Information Systems University of NSW School
The Performance of RTK GPS Mapping In Urban Environments
 Presented at GNSS 2004 The 2004 International Symposium on GNSS/GPS Sydney, Australia 6 8 December 2004 The Performance of RTK GPS Mapping In Urban Environments InSu Lee Linlin Ge Satellite Navigation
Presented at GNSS 2004 The 2004 International Symposium on GNSS/GPS Sydney, Australia 6 8 December 2004 The Performance of RTK GPS Mapping In Urban Environments InSu Lee Linlin Ge Satellite Navigation
Performance Evaluation Of Real Time Precise Point Positioning (RT-PPP) In Static & Kinematic Modes In Egypt
 In Static & Kinematic Modes In Egypt") Performance Evaluation Of Real Time Precise Point Positioning (RT-PPP) In Static & Kinematic Modes In Egypt Eng. Ahmed Mansour Abdallah Dr. Mahmoud Abd Rabbou Prof. Adel El.shazly Geomatic Branch, Civil
Performance Evaluation Of Real Time Precise Point Positioning (RT-PPP) In Static & Kinematic Modes In Egypt Eng. Ahmed Mansour Abdallah Dr. Mahmoud Abd Rabbou Prof. Adel El.shazly Geomatic Branch, Civil
DECIMETER LEVEL MAPPING USING DIFFERENTIAL PHASE MEASUREMENTS OF GPS HANDHELD RECEIVERS
 DECIMETER LEVEL MAPPING USING DIFFERENTIAL PHASE MEASUREMENTS OF GPS HANDHELD RECEIVERS Dr. Ahmed El-Mowafy Civil and Environmental Engineering Department College of Engineering The United Arab Emirates
DECIMETER LEVEL MAPPING USING DIFFERENTIAL PHASE MEASUREMENTS OF GPS HANDHELD RECEIVERS Dr. Ahmed El-Mowafy Civil and Environmental Engineering Department College of Engineering The United Arab Emirates
Positioning Australia for its farming future
 Positioning Australia for its farming future Utilizing the Japanese satellite navigation QZSS system to provide centimetre positioning accuracy across ALL Australia David Lamb 1,2 and Phil Collier 2 1
Positioning Australia for its farming future Utilizing the Japanese satellite navigation QZSS system to provide centimetre positioning accuracy across ALL Australia David Lamb 1,2 and Phil Collier 2 1
COMPARISON OF GPS COMMERCIAL SOFTWARE PACKAGES TO PROCESSING STATIC BASELINES UP TO 30 KM
 COMPARISON OF GPS COMMERCIAL SOFTWARE PACKAGES TO PROCESSING STATIC BASELINES UP TO 30 KM Khaled Mohamed Abdel Mageed Civil Engineering, Cairo, Egypt E-Mail: khaled_mgd@yahoo.com ABSTRACT The objective
COMPARISON OF GPS COMMERCIAL SOFTWARE PACKAGES TO PROCESSING STATIC BASELINES UP TO 30 KM Khaled Mohamed Abdel Mageed Civil Engineering, Cairo, Egypt E-Mail: khaled_mgd@yahoo.com ABSTRACT The objective
RTCM Not for reproduction or redistribution
 RTCM Paper 177-2006-SC104-STD RTCM STANDARD 10403.1 FOR DIFFERENTIAL GNSS (GLOBAL NAVIGATION SATELLITE SYSTEMS) SERVICES VERSION 3 DEVELOPED BY RTCM SPECIAL COMMITTEE NO. 104 OCTOBER 27, 2006 COPYRIGHT
RTCM Paper 177-2006-SC104-STD RTCM STANDARD 10403.1 FOR DIFFERENTIAL GNSS (GLOBAL NAVIGATION SATELLITE SYSTEMS) SERVICES VERSION 3 DEVELOPED BY RTCM SPECIAL COMMITTEE NO. 104 OCTOBER 27, 2006 COPYRIGHT
Broadcast Ionospheric Model Accuracy and the Effect of Neglecting Ionospheric Effects on C/A Code Measurements on a 500 km Baseline
 Broadcast Ionospheric Model Accuracy and the Effect of Neglecting Ionospheric Effects on C/A Code Measurements on a 500 km Baseline Intro By David MacDonald Waypoint Consulting May 2002 The ionosphere
Broadcast Ionospheric Model Accuracy and the Effect of Neglecting Ionospheric Effects on C/A Code Measurements on a 500 km Baseline Intro By David MacDonald Waypoint Consulting May 2002 The ionosphere
Global Correction Services for GNSS
 Global Correction Services for GNSS Hemisphere GNSS Whitepaper September 5, 2015 Overview Since the early days of GPS, new industries emerged while existing industries evolved to use position data in real-time.
Global Correction Services for GNSS Hemisphere GNSS Whitepaper September 5, 2015 Overview Since the early days of GPS, new industries emerged while existing industries evolved to use position data in real-time.
Procedures for Quality Control of GNSS Surveying Results Based on Network RTK Corrections.
 Procedures for Quality Control of GNSS Surveying Results Based on Network RTK Corrections. Limin WU, China Feng xia LI, China Joël VAN CRANENBROECK, Switzerland Key words : GNSS Rover RTK operations, GNSS
Procedures for Quality Control of GNSS Surveying Results Based on Network RTK Corrections. Limin WU, China Feng xia LI, China Joël VAN CRANENBROECK, Switzerland Key words : GNSS Rover RTK operations, GNSS
Time Scales Comparisons Using Simultaneous Measurements in Three Frequency Channels
 Time Scales Comparisons Using Simultaneous Measurements in Three Frequency Channels Petr Pánek and Alexander Kuna Institute of Photonics and Electronics AS CR, Chaberská 57, Prague, Czech Republic panek@ufe.cz
Time Scales Comparisons Using Simultaneous Measurements in Three Frequency Channels Petr Pánek and Alexander Kuna Institute of Photonics and Electronics AS CR, Chaberská 57, Prague, Czech Republic panek@ufe.cz
RTCM State Space Representation (SSR) Overall Concepts Towards PPP-RTK
 Overall Concepts Towards PPP-RTK") RTCM State Space Representation (SSR) Overall Concepts Towards PPP-RTK Gerhard Wübbena Geo++ GmbH 30827 Garbsen Germany www.geopp.de Contents Terms and Abbreviations RTCM-SSR Working Group GNSS Error Sources
RTCM State Space Representation (SSR) Overall Concepts Towards PPP-RTK Gerhard Wübbena Geo++ GmbH 30827 Garbsen Germany www.geopp.de Contents Terms and Abbreviations RTCM-SSR Working Group GNSS Error Sources
Phase Center Calibration and Multipath Test Results of a Digital Beam-Steered Antenna Array
 Phase Center Calibration and Multipath Test Results of a Digital Beam-Steered Antenna Array Kees Stolk and Alison Brown, NAVSYS Corporation BIOGRAPHY Kees Stolk is an engineer at NAVSYS Corporation working
Phase Center Calibration and Multipath Test Results of a Digital Beam-Steered Antenna Array Kees Stolk and Alison Brown, NAVSYS Corporation BIOGRAPHY Kees Stolk is an engineer at NAVSYS Corporation working
Multisystem Real Time Precise-Point-Positioning, today with GPS+GLONASS in the near future also with QZSS, Galileo, Compass, IRNSS
 2 International Symposium on /GNSS October 26-28, 2. Multisystem Real Time Precise-Point-Positioning, today with +GLONASS in the near future also with QZSS, Galileo, Compass, IRNSS Álvaro Mozo García,
2 International Symposium on /GNSS October 26-28, 2. Multisystem Real Time Precise-Point-Positioning, today with +GLONASS in the near future also with QZSS, Galileo, Compass, IRNSS Álvaro Mozo García,
Real-Time Carrier Phase Ambiguity Resolution for GPS/GLONASS Reference Station Networks
 Real-Time Carrier Phase Ambiguity Resolution for GPS/GLONASS Reference Station Networks Liwen Dai, Jinling Wang, Chris Rizos and Shaowei Han School of Geomatic Engineering University of New South Wales
Real-Time Carrier Phase Ambiguity Resolution for GPS/GLONASS Reference Station Networks Liwen Dai, Jinling Wang, Chris Rizos and Shaowei Han School of Geomatic Engineering University of New South Wales
THE INFLUENCE OF ZENITH TROPOSPHERIC DELAY ON PPP-RTK. S. Nistor a, *, A.S. Buda a,
 THE INFLUENCE OF ZENITH TROPOSPHERIC DELAY ON PPP-RTK S. Nistor a, *, A.S. Buda a, a University of Oradea, Faculty of Civil Engineering, Cadastre and Architecture, Department Cadastre-Architecture, Romania,
THE INFLUENCE OF ZENITH TROPOSPHERIC DELAY ON PPP-RTK S. Nistor a, *, A.S. Buda a, a University of Oradea, Faculty of Civil Engineering, Cadastre and Architecture, Department Cadastre-Architecture, Romania,
A Positon and Orientation Post-Processing Software Package for Land Applications - New Technology
 A Positon and Orientation Post-Processing Software Package for Land Applications - New Technology Tatyana Bourke, Applanix Corporation Abstract This paper describes a post-processing software package that
A Positon and Orientation Post-Processing Software Package for Land Applications - New Technology Tatyana Bourke, Applanix Corporation Abstract This paper describes a post-processing software package that
Jun CHEN. Differential GNSS positioning with low-cost receivers. Background. Objective: Methods:
 Jun CHEN Differential GNSS positioning with low-cost receivers Duration of the Thesis: 6 months Completion: May 2013 Tutor: Prof. Dr. sc.-techn. Wolfgang Keller Dr. Maorong Ge (Potsdam-GFZ) Examiner: Prof.
Jun CHEN Differential GNSS positioning with low-cost receivers Duration of the Thesis: 6 months Completion: May 2013 Tutor: Prof. Dr. sc.-techn. Wolfgang Keller Dr. Maorong Ge (Potsdam-GFZ) Examiner: Prof.
LocataNet: Intelligent time-synchronised pseudolite transceivers for cm-level stand-alone positioning
 LocataNet: Intelligent time-synchronised pseudolite transceivers for cm-level stand-alone positioning J. Barnes, C. Rizos, J. Wang Satellite Navigation and Positioning (SNAP) Group School of Surveying
LocataNet: Intelligent time-synchronised pseudolite transceivers for cm-level stand-alone positioning J. Barnes, C. Rizos, J. Wang Satellite Navigation and Positioning (SNAP) Group School of Surveying
Modelling GPS Observables for Time Transfer
 Modelling GPS Observables for Time Transfer Marek Ziebart Department of Geomatic Engineering University College London Presentation structure Overview of GPS Time frames in GPS Introduction to GPS observables
Modelling GPS Observables for Time Transfer Marek Ziebart Department of Geomatic Engineering University College London Presentation structure Overview of GPS Time frames in GPS Introduction to GPS observables
GNSS Multi Station Adjustment for Permanent Deformation Analysis Networks
 GNSS Multi Station Adjustment for Permanent Deformation Analysis Networks Gerhard Wübbena, Andreas Bagge Geo++ GmbH Gesellschaft für satellitengestützte geodätische und navigatorische Technologien mbh
GNSS Multi Station Adjustment for Permanent Deformation Analysis Networks Gerhard Wübbena, Andreas Bagge Geo++ GmbH Gesellschaft für satellitengestützte geodätische und navigatorische Technologien mbh
Development and assessment of a medium-range real-time kinematic GPS algorithm using an ionospheric information filter
 LETTER Earth Planets Space, 52, 783 788, 2000 Development and assessment of a medium-range real-time kinematic GPS algorithm using an ionospheric information filter Ming Yang 1, Chin-Hsien Tang 1, and
LETTER Earth Planets Space, 52, 783 788, 2000 Development and assessment of a medium-range real-time kinematic GPS algorithm using an ionospheric information filter Ming Yang 1, Chin-Hsien Tang 1, and
Cycle Slip Detection in Single Frequency GPS Carrier Phase Observations Using Expected Doppler Shift
 Nordic Journal of Surveying and Real Estate Research Volume, Number, 4 Nordic Journal of Surveying and Real Estate Research : (4) 63 79 submitted on April, 3 revised on 4 September, 3 accepted on October,
Nordic Journal of Surveying and Real Estate Research Volume, Number, 4 Nordic Journal of Surveying and Real Estate Research : (4) 63 79 submitted on April, 3 revised on 4 September, 3 accepted on October,
FieldGenius Technical Notes GPS Terminology
 FieldGenius Technical Notes GPS Terminology Almanac A set of Keplerian orbital parameters which allow the satellite positions to be predicted into the future. Ambiguity An integer value of the number of
FieldGenius Technical Notes GPS Terminology Almanac A set of Keplerian orbital parameters which allow the satellite positions to be predicted into the future. Ambiguity An integer value of the number of
INTEGRITY AND CONTINUITY ANALYSIS FROM GPS JULY TO SEPTEMBER 2016 QUARTERLY REPORT
 INTEGRITY AND CONTINUITY ANALYSIS FROM GPS JULY TO SEPTEMBER 2016 QUARTERLY REPORT Name Responsibility Date Signature Prepared by M Pattinson (NSL) 07/10/16 Checked by L Banfield (NSL) 07/10/16 Authorised
INTEGRITY AND CONTINUITY ANALYSIS FROM GPS JULY TO SEPTEMBER 2016 QUARTERLY REPORT Name Responsibility Date Signature Prepared by M Pattinson (NSL) 07/10/16 Checked by L Banfield (NSL) 07/10/16 Authorised
TREATMENT OF DIFFRACTION EFFECTS CAUSED BY MOUNTAIN RIDGES
 TREATMENT OF DIFFRACTION EFFECTS CAUSED BY MOUNTAIN RIDGES Rainer Klostius, Andreas Wieser, Fritz K. Brunner Institute of Engineering Geodesy and Measurement Systems, Graz University of Technology, Steyrergasse
TREATMENT OF DIFFRACTION EFFECTS CAUSED BY MOUNTAIN RIDGES Rainer Klostius, Andreas Wieser, Fritz K. Brunner Institute of Engineering Geodesy and Measurement Systems, Graz University of Technology, Steyrergasse
5G positioning and hybridization with GNSS observations
 5G positioning and hybridization with GNSS observations 1. Introduction Abstract The paradigm of ubiquitous location information has risen a requirement for hybrid positioning methods, as a continuous
5G positioning and hybridization with GNSS observations 1. Introduction Abstract The paradigm of ubiquitous location information has risen a requirement for hybrid positioning methods, as a continuous
Space Weather influence on satellite based navigation and precise positioning
 Space Weather influence on satellite based navigation and precise positioning R. Warnant, S. Lejeune, M. Bavier Royal Observatory of Belgium Avenue Circulaire, 3 B-1180 Brussels (Belgium) What this talk
Space Weather influence on satellite based navigation and precise positioning R. Warnant, S. Lejeune, M. Bavier Royal Observatory of Belgium Avenue Circulaire, 3 B-1180 Brussels (Belgium) What this talk
Real-Time Data Flow and Product Generation for GNSS. Jet Propulsion Laboratory. California Institute of Technology. Natural Resources Canada
 Real-Time Data Flow and Product Generation for GNSS Ronald J. Muellerschoen rjm @ mailhost4.jpl.nasa.gov Abstract Jet Propulsion Laboratory California Institute of Technology Mark Caissy caissy @NRCan.gc.ca
Real-Time Data Flow and Product Generation for GNSS Ronald J. Muellerschoen rjm @ mailhost4.jpl.nasa.gov Abstract Jet Propulsion Laboratory California Institute of Technology Mark Caissy caissy @NRCan.gc.ca
GPS Position Estimation Using Integer Ambiguity Free Carrier Phase Measurements
 ISSN (Online) : 975-424 GPS Position Estimation Using Integer Ambiguity Free Carrier Phase Measurements G Sateesh Kumar #1, M N V S S Kumar #2, G Sasi Bhushana Rao *3 # Dept. of ECE, Aditya Institute of
ISSN (Online) : 975-424 GPS Position Estimation Using Integer Ambiguity Free Carrier Phase Measurements G Sateesh Kumar #1, M N V S S Kumar #2, G Sasi Bhushana Rao *3 # Dept. of ECE, Aditya Institute of
On Ultrahigh-Precision GPS Positioning and Navigation
 On Ultrahigh-Precision GPS Positioning and Navigation Donghyun Kim and Richard B. Langley Geodetic Research Laboratory, Department of Geodesy and Geomatics Engineering University of New Brunswick, Canada
On Ultrahigh-Precision GPS Positioning and Navigation Donghyun Kim and Richard B. Langley Geodetic Research Laboratory, Department of Geodesy and Geomatics Engineering University of New Brunswick, Canada
The Stochastic Modeling of GPS Observations
 Turkish J. Eng. Env. Sci. 28 (24), 223 231. c TÜBİTAK The Stochastic Modeling of GPS Observations M. Tevfik ÖZLÜDEMİR İstanbul Technical University, Department of Geodetic and Photogrammetric Engineering,
Turkish J. Eng. Env. Sci. 28 (24), 223 231. c TÜBİTAK The Stochastic Modeling of GPS Observations M. Tevfik ÖZLÜDEMİR İstanbul Technical University, Department of Geodetic and Photogrammetric Engineering,
PPP with Ambiguity Resolution (AR) using RTCM-SSR
 using RTCM-SSR") PPP with Ambiguity Resolution (AR) using RTCM-SSR Gerhard Wübbena, Martin Schmitz, Andreas Bagge Geo++ GmbH 30827 Garbsen Germany www.geopp.de PPP with Ambiguity Resolution (AR) using RTCM-SSR Abstract
PPP with Ambiguity Resolution (AR) using RTCM-SSR Gerhard Wübbena, Martin Schmitz, Andreas Bagge Geo++ GmbH 30827 Garbsen Germany www.geopp.de PPP with Ambiguity Resolution (AR) using RTCM-SSR Abstract
Korean Geodetic Datum 2002(KGD2002): Nationwide GPS Network Densification
: Nationwide GPS Network Densification") Korean Geodetic Datum 2002(KGD2002): Nationwide GPS Network Densification Young-Jin LEE, Hung-Kyu LEE, Kwang-Ho JEONG, and Sang-Hun CHA, Republic of Korea Key words: KGD2002, GPS, Network Densification,
Korean Geodetic Datum 2002(KGD2002): Nationwide GPS Network Densification Young-Jin LEE, Hung-Kyu LEE, Kwang-Ho JEONG, and Sang-Hun CHA, Republic of Korea Key words: KGD2002, GPS, Network Densification,
How multipath error influences on ambiguity resolution
 How multipath error influences on ambiguity resolution Nobuaki Kubo, Akio Yasuda Tokyo University of Mercantile Marine BIOGRAPHY Nobuaki Kubo received his Master of Engineering (Electrical) in 99 from
How multipath error influences on ambiguity resolution Nobuaki Kubo, Akio Yasuda Tokyo University of Mercantile Marine BIOGRAPHY Nobuaki Kubo received his Master of Engineering (Electrical) in 99 from
Chapter 6 GPS Relative Positioning Determination Concepts
 Chapter 6 GPS Relative Positioning Determination Concepts 6-1. General Absolute positioning, as discussed earlier, will not provide the accuracies needed for most USACE control projects due to existing
Chapter 6 GPS Relative Positioning Determination Concepts 6-1. General Absolute positioning, as discussed earlier, will not provide the accuracies needed for most USACE control projects due to existing
ABSTRACT: Three types of portable units with GNSS raw data recording capability are assessed to determine static and kinematic position accuracy
 ABSTRACT: Three types of portable units with GNSS raw data recording capability are assessed to determine static and kinematic position accuracy under various environments using alternatively their internal
ABSTRACT: Three types of portable units with GNSS raw data recording capability are assessed to determine static and kinematic position accuracy under various environments using alternatively their internal
Impact of Different Tropospheric Models on GPS Baseline Accuracy: Case Study in Thailand
 Journal of Global Positioning Systems (2005) Vol. 4, No. 1-2: 36-40 Impact of Different Tropospheric Models on GPS Baseline Accuracy: Case Study in Thailand Chalermchon Satirapod and Prapod Chalermwattanachai
Journal of Global Positioning Systems (2005) Vol. 4, No. 1-2: 36-40 Impact of Different Tropospheric Models on GPS Baseline Accuracy: Case Study in Thailand Chalermchon Satirapod and Prapod Chalermwattanachai
Locata: A New Positioning Technology for High Precision Indoor and Outdoor Positioning
 Locata: A New Positioning Technology for High Precision Indoor and Outdoor Positioning Joel Barnes, Chris Rizos, Jinling Wang School of Surveying & Spatial Information Systems, The University of New South
Locata: A New Positioning Technology for High Precision Indoor and Outdoor Positioning Joel Barnes, Chris Rizos, Jinling Wang School of Surveying & Spatial Information Systems, The University of New South
POWERGPS : A New Family of High Precision GPS Products
 POWERGPS : A New Family of High Precision GPS Products Hiroshi Okamoto and Kazunori Miyahara, Sokkia Corp. Ron Hatch and Tenny Sharpe, NAVCOM Technology Inc. BIOGRAPHY Mr. Okamoto is the Manager of Research
POWERGPS : A New Family of High Precision GPS Products Hiroshi Okamoto and Kazunori Miyahara, Sokkia Corp. Ron Hatch and Tenny Sharpe, NAVCOM Technology Inc. BIOGRAPHY Mr. Okamoto is the Manager of Research
Satellite Navigation Integrity and integer ambiguity resolution
 Satellite Navigation Integrity and integer ambiguity resolution Picture: ESA AE4E08 Sandra Verhagen Course 2010 2011, lecture 12 1 Today s topics Integrity and RAIM Integer Ambiguity Resolution Study Section
Satellite Navigation Integrity and integer ambiguity resolution Picture: ESA AE4E08 Sandra Verhagen Course 2010 2011, lecture 12 1 Today s topics Integrity and RAIM Integer Ambiguity Resolution Study Section
Precise Surveying with L1 RTK
 International Global Navigation Satellite Systems Society IGNSS Symposium 2007 The University of New South Wales, Sydney, Australia 4 6 December, 2007 Precise Surveying with L1 RTK Ian Iredale Mapsoft
International Global Navigation Satellite Systems Society IGNSS Symposium 2007 The University of New South Wales, Sydney, Australia 4 6 December, 2007 Precise Surveying with L1 RTK Ian Iredale Mapsoft
Assessment of the Accuracy of Processing GPS Static Baselines Up To 40 Km Using Single and Dual Frequency GPS Receivers.
 International OPEN ACCESS Journal Of Modern Engineering Research (IJMER) Assessment of the Accuracy of Processing GPS Static Baselines Up To 40 Km Using Single and Dual Frequency GPS Receivers. Khaled
International OPEN ACCESS Journal Of Modern Engineering Research (IJMER) Assessment of the Accuracy of Processing GPS Static Baselines Up To 40 Km Using Single and Dual Frequency GPS Receivers. Khaled
Evaluation of L2C Observations and Limitations
 Evaluation of L2C Observations and Limitations O. al-fanek, S. Skone, G.Lachapelle Department of Geomatics Engineering, Schulich School of Engineering, University of Calgary, Canada; P. Fenton NovAtel
Evaluation of L2C Observations and Limitations O. al-fanek, S. Skone, G.Lachapelle Department of Geomatics Engineering, Schulich School of Engineering, University of Calgary, Canada; P. Fenton NovAtel
C Nav QA/QC Precision and Reliability Statistics
 C Nav QA/QC Precision and Reliability Statistics C Nav World DGPS 730 East Kaliste Saloom Road Lafayette, Louisiana, 70508 Phone: +1 337.261.0000 Fax: +1 337.261.0192 DOCUMENT CONTROL Revision Author /
C Nav QA/QC Precision and Reliability Statistics C Nav World DGPS 730 East Kaliste Saloom Road Lafayette, Louisiana, 70508 Phone: +1 337.261.0000 Fax: +1 337.261.0192 DOCUMENT CONTROL Revision Author /
The Possibility of Precise Positioning in the Urban Area
 Presented at GNSS 004 The 004 International Symposium on GNSS/GPS Sydney, Australia 6 8 December 004 The Possibility of Precise Positioning in the Urban Area Nobuai Kubo Toyo University of Marine Science
Presented at GNSS 004 The 004 International Symposium on GNSS/GPS Sydney, Australia 6 8 December 004 The Possibility of Precise Positioning in the Urban Area Nobuai Kubo Toyo University of Marine Science
Proceedings of Al-Azhar Engineering 7 th International Conference Cairo, April 7-10, 2003.
 Proceedings of Al-Azhar Engineering 7 th International Conference Cairo, April 7-10, 2003. MODERNIZATION PLAN OF GPS IN 21 st CENTURY AND ITS IMPACTS ON SURVEYING APPLICATIONS G. M. Dawod Survey Research
Proceedings of Al-Azhar Engineering 7 th International Conference Cairo, April 7-10, 2003. MODERNIZATION PLAN OF GPS IN 21 st CENTURY AND ITS IMPACTS ON SURVEYING APPLICATIONS G. M. Dawod Survey Research
GPS STATIC-PPP POSITIONING ACCURACY VARIATION WITH OBSERVATION RECORDING INTERVAL FOR HYDROGRAPHIC APPLICATIONS (ASWAN, EGYPT)
") GPS STATIC-PPP POSITIONING ACCURACY VARIATION WITH OBSERVATION RECORDING INTERVAL FOR HYDROGRAPHIC APPLICATIONS (ASWAN, EGYPT) Ashraf Farah Associate Professor,College of Engineering, Aswan University,
GPS STATIC-PPP POSITIONING ACCURACY VARIATION WITH OBSERVATION RECORDING INTERVAL FOR HYDROGRAPHIC APPLICATIONS (ASWAN, EGYPT) Ashraf Farah Associate Professor,College of Engineering, Aswan University,
The Benefit of Triple Frequency on Cycle Slip Detection
 Presented at the FIG Congress 2018, The Benefit of Triple Frequency on Cycle Slip Detection May 6-11, 2018 in Istanbul, Turkey Dong Sheng Zhao 1, Craig Hancock 1, Gethin Roberts 2, Lawrence Lau 1 1 The
Presented at the FIG Congress 2018, The Benefit of Triple Frequency on Cycle Slip Detection May 6-11, 2018 in Istanbul, Turkey Dong Sheng Zhao 1, Craig Hancock 1, Gethin Roberts 2, Lawrence Lau 1 1 The
Compact Data Transmission Standard for High-Precision GPS
 Compact Data Transmission Standard for High-Precision GPS Dr. Nicholas C. Talbot Trimble Navigation BIOGRAPHY Nicholas Talbot graduated from the Royal Melbourne Institute of Technology, Australia, with
Compact Data Transmission Standard for High-Precision GPS Dr. Nicholas C. Talbot Trimble Navigation BIOGRAPHY Nicholas Talbot graduated from the Royal Melbourne Institute of Technology, Australia, with
Positioning with Single and Dual Frequency Smartphones Running Android 7 or Later
 Positioning with Single and Dual Frequency Smartphones Running Android 7 or Later * René Warnant, *Laura Van De Vyvere, + Quentin Warnant * University of Liege Geodesy and GNSS + Augmenteo, Plaine Image,
Positioning with Single and Dual Frequency Smartphones Running Android 7 or Later * René Warnant, *Laura Van De Vyvere, + Quentin Warnant * University of Liege Geodesy and GNSS + Augmenteo, Plaine Image,
EFFECTS OF IONOSPHERIC SMALL-SCALE STRUCTURES ON GNSS
 EFFECTS OF IONOSPHERIC SMALL-SCALE STRUCTURES ON GNSS G. Wautelet, S. Lejeune, R. Warnant Royal Meteorological Institute of Belgium, Avenue Circulaire 3 B-8 Brussels (Belgium) e-mail: gilles.wautelet@oma.be
EFFECTS OF IONOSPHERIC SMALL-SCALE STRUCTURES ON GNSS G. Wautelet, S. Lejeune, R. Warnant Royal Meteorological Institute of Belgium, Avenue Circulaire 3 B-8 Brussels (Belgium) e-mail: gilles.wautelet@oma.be
The Benefits of Three Frequencies for the High Accuracy Positioning
 The Benefits of Three Frequencies for the High Accuracy Positioning Nobuaki Kubo (Tokyo University of Marine and Science Technology) Akio Yasuda (Tokyo University of Marine and Science Technology) Isao
The Benefits of Three Frequencies for the High Accuracy Positioning Nobuaki Kubo (Tokyo University of Marine and Science Technology) Akio Yasuda (Tokyo University of Marine and Science Technology) Isao