Deep Learning with Radar PROJECT PLAN
|
|
|
- Kelley Simmons
- 5 years ago
- Views:
Transcription
1 Deep Learning with Radar PROJECT PLAN #18 Client: Michael Olson - Danfoss Advisor: Dr. Wang Tucker Creger - Project Manager Kellen O Connor - Deep Learning Architect Eric Bishop - Software Developer Mitch Hagar - Radar System Lead Clayton White - Hardware Design Engineer Nihaal Sitaraman - Hardware Developer sddec18@iastate.edu Revised: /2.0 SDDEC
2 Table of Contents 1 Introductory Material Acknowledgement Problem Statement Operating Environment Intended Users and Intended Uses Assumptions and Limitations Expected End Product and Other Deliverables 6 2 Proposed Approach and Statement of Work Objective of the Task Functional Requirements Error! Bookmark not defined. 2.3 Constraints Considerations Previous Work And Literature Proposed Design Technology Considerations Safety Considerations Task Approach Possible Risks And Risk Management Error! Bookmark not defined Project Proposed Milestones and Evaluation Criteria Project Tracking Procedures Expected Results and Validation Test Plan 13 3 Project Timeline, Estimated Resources, and Challenges Project Timeline Feasibility Assessment Personnel Effort Requirements Other Resource Requirements 17 SDDEC
3 3.5 Financial Requirements 17 4 Closure Materials Conclusion References Appendices 19 SDDEC
4 List of Figures Include a LIST of all figures used. Be sure images throughout paper have same indexing. (example)figure 1: Proposed Design Diagram List of Tables ex. Table 1: Timeline of proposed work schedules for the Spring semester. List of Symbols List of Definitions Please include any definitions and/or acronyms the readers would like to know. example: ASA: American Standards Association SDDEC
5 1 Introductory Material 1.1 ACKNOWLEDGEMENT The project team would like to thank Michael Olson and Radoslaw Kornicki from Danfoss for their support on this project. We would also like to thank Dr. Wang for advising our team. 1.2 PROBLEM STATEMENT As the agriculture and construction industries require autonomous solutions for increased safety and productivity the need to sense objects in the equipment path increases. There are many solutions on the market today using cameras and LIDAR. These solutions have limitations in weather and low light conditions. We were tasked with creating a system using radar to eliminate these limitations. RADAR is able to operate in the dark. It is also immune to the effects of low light, rain, snow, and fog. Our project consists of two main components: the implementation of a radar system and the development of a deep learning model. The radar system will allow us to detect objects in many different conditions. The deep learning model will identify objects in the equipment s path. This will allow for a notification to the equipment operator of objects in the vehicle's path and in the future, fully autonomous operation. 1.3 OPERATING ENVIRONMENT The operating environment for the system will be on agriculture and construction equipment. This will require the system to be able to withstand water and dust from the operating environment and the vibrations associated with operation. 1.4 INTENDED USERS AND INTENDED USES The intended use is for certain agricultural vehicles and construction equipment that are a key area for our client. The long term use case is fully autonomous operation of machinery. It can also be used as an operator aid for safety. 1.5 ASSUMPTIONS AND LIMITATIONS Assumptions: - The operating conditions for the equipment will be normal and not abusive. - The system will be mounted in an area that is protected from impact. - The system-on-a-chip and radar will be able to operate in a rugged environment. Limitations: - The system will only operate up to 15 mph. This will cover a large range of agriculture and construction equipment. - The system will not be 100% immune to sensor blockage by dust and dirt. SDDEC
6 1.6 EXPECTED END PRODUCT AND OTHER DELIVERABLES For this project, our deliverables are a whole system including a radar module working with a deep learning model running on a system-on-a-chip to perform object localization and classification. The system will notify the vehicle operator via an LCD screen in the cab of the objects positions and types. The delivery date is December This system will be used for a demo on a piece of construction or agriculture equipment for our client. Other deliverables include proposals regarding our radar and system-on-a-chip selection, reports on which deep learning platforms are most suited for use in mobile applications and a final report regarding the feasibility of implementing radar in construction and agricultural applications. The delivery date of all reports is December The delivery date of proposals to purchase the system-on-a-chip and radar will be February 2018 and March 2018, respectively. SDDEC
7 2 Proposed Approach and Statement of Work 2.1 OBJECTIVE OF THE TASK Our objective is to evaluate various radar technologies for Danfoss and through a combination of digital signal processing and deep learning, perform object detection and localization. By December 2018, we will have selected a radar option, a computing system adequate for a rough environment, designed and trained a neural network with data collected from the radar system, and implemented it on a vehicle to alert an operator of the presence and location of unique objects. In order to provide value to Danfoss, we will also include a report evaluating various radar technologies, deep learning platforms, and computing systems to assist them in making a business decision when deciding to implement this technology in the future. 2.2 FUNCTIONAL REQUIREMENTS The functional requirements for the proposed design focus on robust detection and robust operation in agricultural and construction environments. A list of functional requirements is shown below. 1. The system shall have a range of 60 meters. a. Rationale: A range of 60 meters is required for early detection and identification. A machine traveling at 15 mph will cover 60 meters in less than 10 seconds. This range is allows for an object to be detected with sufficient time for action. 2. The system shall function on machines travelling at up to a speed of 15 mph or 6.7 m/s. a. Rationale: Most agriculture and construction equipment travels at speeds in the range of 5 mph to 15 mph. A max speed of 15 mph will allow for the majority of applications to be covered. 3. The system shall have angular range of ±30. a. Rationale: An angular range of ±30 is required to detect objects in the vehicle s path with sufficient time to stop. 4. The system shall have a processing speed of 15 frames per second. a. Rationale: The system needs to detect an object with sufficient time to react. A frame rate of 15 frames per second on a vehicle traveling approximately 15 mph or 6.7 m/s means the vehicle will travel no further than 0.5 m between each frame update. SDDEC
8 5. The system shall detect objects greater than 0.4 m size. a. Rationale: A width of 0.4 m is the width of human shoulders. Detection of a human is, at minimum, required for safe operation of the system. 6. The system shall be weather resistant to water, dust, and shock. a. Rationale: Danfoss target applications involve heavy machinery that works in tough environments. 7. The system shall have a probability of missed detection less than 0.3. a. Rationale: A probability of 0.3 means that for each subsequent frame, the probability of missing an object multiple times approaches zero, which will yield a sufficiently short stopping distance. 8. The system shall have a probability of false alarm less than 0.3. a. Rationale: A false alarm, though undesirable, will be a safer alternative than a missed detection. 9. The system shall run off of a 12V power supply. a. Rationale: This voltage is easily available from a selection of batteries with also a range of amp hours. It is also easily available on a heavy equipment chassis. A step-up converter or inverter is acceptable. 10. The system shall fit inside 1 x1 x1 space. a. Rationale: Space is limited on a vehicle, so our design must be compact enough to not obstruct operator view or regular vehicle operation. 11. The system shall detect at least 4 classes of objects. a. Rationale: Our system should detect people, cars, construction equipment, and buildings. 12. The system shall/should operate in the temperature range from -40 to 125 degrees Fahrenheit. a. Rationale: This is a common operating range for automotive sensors. 2.3 CONSTRAINTS CONSIDERATIONS As part of the project, we must evaluate various radar options, deep learning platforms, object detection networks, and computing systems. Evaluation of these systems will be centered on the functional requirements, but the behavior of the full system cannot be SDDEC
9 known without implementing all combinations of each option. Therefore, a written report regarding behavior of individual components is necessary to justify our choices. Because this project will ultimately lead to a business decision from Danfoss, cost of the system must be considered. We will strive to minimize cost, but not at the expense of our functional requirements. Our code must be well commented and accessible to the client. The team will use Gitlab for version management of our software. This includes our neural network, data acquisition tools, and any low-level radar code. Training data acquired during our project must be accessible to our client, yet secure. We will collaborate with Danfoss to ensure data collected (which may include imagery from their facilities) is secure to their internal standards. For our code, group members will follow an agreed upon coding convention. Because we expect much of our code to be Python, we will follow PEP 8 - Style Guide for Python Code: The IEEE code of ethics will help guide our project, and ensure that our work does not violate the health and safety of our members, equipment operators, or Danfoss employees. We will ensure that any research performed is well documented and cited where necessary. This code of ethics is applicable to our project because we are working on something that may eventually be used to prevent injury, so ethical violations could indirectly cause harm eventually. 2.4 PREVIOUS WORK AND LITERATURE Literature surrounding the use of deep learning with radar focuses on either close-range object classification, or improvement of synthetic aperture radar. A study from the University of St. Andrews showcases how short range radar can be used to differentiate between various objects, as shown here: This study is encouraging in that it shows how radar waves may be reflected in a unique way from different objects, but it does not show longrange applications, which is a significant shortcoming. A research paper from Radar Conference [1] shows how deep learning can be used to improve the digital signal processing aspect of radar for synthetic aperture radar. This is beyond the scope of our project, as our project centers more around performing deep learning on radar imagery, rather than creating the imagery itself. Also, our system must perform real-time detection, not reconstruct an image later. Literature more relevant to our project is related to object detection on RGB imagery. Several methods have been published that detail balances between speed and accuracy of SDDEC
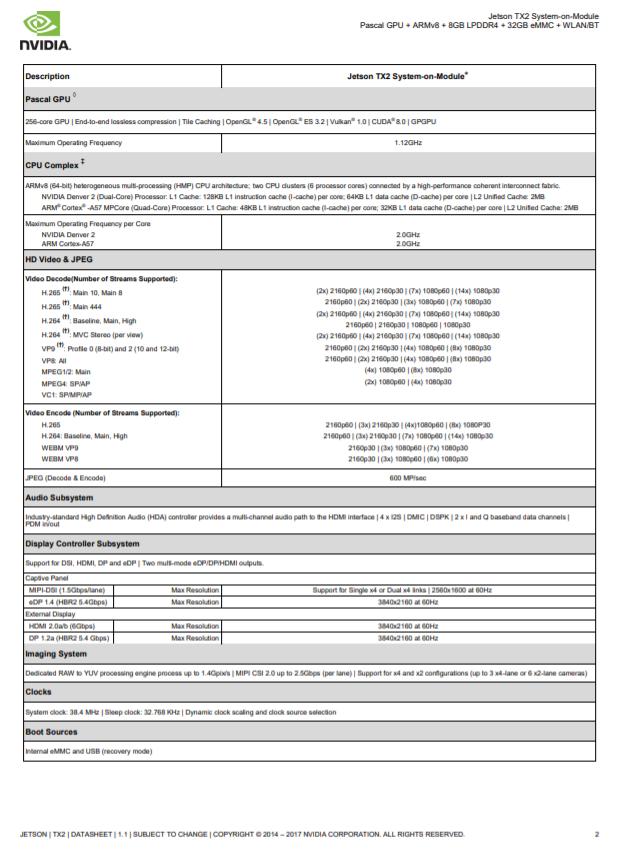
10 neural networks for object detection. This website provides a summary of various object detection methods that we may utilize for our project: Of interest are Single-Shot Detector (SSD) (arxiv: [cs.cv] ) and Faster RCNN (FRCNN) (arxiv: [cs.cv] ). These network topologies take different approaches to detect objects. FRCNN proposes regions where an object might be, and evaluates each region to determine where an object lies in an image. SSD analyzes an image with fixed bounding boxes around what the CNN determines are relevant features to determine where an object is. For our purposes, SSD may be a better option to explore due to its improved speed compared to FRCNN, but at the expense of accuracy. Both network topologies deal with image resolutions beyond what our radar is likely capable of producing, so we may need to explore techniques for interpolation. As a team, we must develop a network that can perform object detection in real time with sufficient speed and accuracy that does not rely on these existing networks. Because the data we collect is processed to produce an image, we have the advantage of the option to incorporate raw signal data into our network, which is not an option for state of the art object detection networks for imagery. 2.5 PROPOSED DESIGN In the end, our designed system must be able to detect and identify an object up to 60 meters away, as long as the object is within the 60 degree angle of view. The radar will be a Delphi ESR 2.5, connected to an NVIDIA Jetson TX2 through CAN. A block diagram of our proposed design is shown in figure 1. Figure 1: System Block Diagram SDDEC

11 For the system output, the operator will be notified on an LCD display within the cab, connected to the Jetson TX2 via CAN. We will also explore other ways to notify other vehicle systems using the CAN bus, or the operator by the use of warning lights. The system must be able to identify the object. To do so, our deep learning model built with Keras will perform classification. The system must be able to operate in all normal weather conditions such as cold, hot, windy, rainy, etc. The Delphi ESR 2.5, as automotive radar, is well suited for the task. 2.6 TECHNOLOGY CONSIDERATIONS Many different radar systems and deep learning APIs are available. It has been decided that Keras is going to most likely be the deep learning API for our system due to its simplicity, versatility, and a team member s previous experience with it. At the moment, the radar system by Walabot is being used as a test subject. This radar system does not have the range needed to meet design requirements, but it does come with an interface that is simple to operate. This system is being used as a testbench so that we can write scripts to convert radar data into distance and angle. Texas Instruments offers a chip and another supplier has a radar system that meets our distance requirements but does not offer an interface. Also, the system is quite expensive and exceeds our client s budget. Again, due to the variety of radar systems in the market, a final decision has yet to be made on which radar system our team chooses. SDDEC

12 2.7 SAFETY CONSIDERATIONS If soldering circuitry becomes a task, burns are a possible risk. Typical solder temperatures range from degrees Fahrenheit. The team member attempting to use a soldering station should have basic knowledge on how it operates. Our design will eventually be tested on large machinery such as farm and construction equipment which will create safety risks. Personal protective equipment (PPE) and/or training may be required in order to avoid cuts, head trauma, slips, etc. 2.8 TASK APPROACH Our task approach for the design can be visualized using the block diagram below. As of now, we have met with the client and determined system requirements. Next, the team will be reviewing those requirements and designing the system. Once the radar system, user interface, and radar chip has been selected, the design process of the overall system will be begin. 2.9 POSSIBLE RISKS AND RISK MANAGEMENT The cost of our radar system, in total, will reach at least $6475, The Delphi ESR 2.5 costs $6175 while the NVIDIA Jetson TX2 cost $300. Due to the high cost of the system, it has taken longer than expected to receive these necessary items. SDDEC
13 2.10 PROJECT PROPOSED MILESTONES AND EVALUATION CRITERIA Deciding on a particular radar system is our first key milestone. This radar will need to meet all functional requirements. When we believe we have found the correct radar we will purchase it. The next milestone will be hooking the system up. Once we have the system setup we will test to make sure all components work with each other by testing the input and output of the system. As long as information gets from input to the output we will know we have it set up correctly. The last key milestone will be a working deep learning model. Our final product will be tested on our client s test track in Ames. If our product detects the object it is supposed to, then we know it works. The test plan for this is in section PROJECT TRACKING PROCEDURES Our group is using GitLab and Google Drive to track our process. Tasks will be assigned to individuals for tracking, and all relevant documents will be shared on Google Drive to ensure all group members have access EXPECTED RESULTS AND VALIDATION Our desired outcome is to be able to detect four different classes of objects. Not only do we want to detect these objects, but we want the driver to be able to see where the object is and what the object is via a user interface. Again, we will confirm our system works at a high level by testing it at the Danfoss test track. The test plan in the next section describes in detail how we will confirm all requirements are met TEST PLAN We will have many different levels of testing. Some testing will be just software testing of the deep learning model. Some will be bench testing of the radar system. We will have some full system testing in a lab environment. Lastly, we will take our system to Danfoss test track for a real world test. We will test the system with objects at 10, 20, 30, 40, and 50 meters. We will test the system with objects moving at various speeds, along with the machines speed. In order to meet each functional requirement, a simple test will be performed for each of the following: 1. The system shall have a range of 60 meters. a. Test: All classes of objects to be detected will be placed at 60 meters away from the system and we will observe if they are detected. 2. The system shall function on machines travelling at up to a speed of 15 mph or 6.7 m/s. SDDEC
14 a. Test: The vehicle will travel at this top speed, and we will observe if it adequately performs detections (to be specified how in requirements 7 and 8). 3. The system shall have angular range of ±30. a. Test: This is a RADAR and camera specification and does not require a test. 4. The system shall have a processing speed of 15 frames per second. a. Test: The system will be allowed to run for several minutes, with each frame incrementing a counter. If the average speed is greater than 15 frames per second, it is sufficient. 5. The system shall detect objects greater than 0.4 m size. a. Test: An object 0.4 meters wide will be placed 60 meters away. The system must detect it. 6. The system shall be weather resistant to water, dust, and shock. a. Test: The system will be mounted on a vehicle, where it will be naturally exposed to dust, water, and shock. The radar we select will have an IP rating that is resistant to these dangers. 7. The system shall have a probability of missed detection less than 0.3. a. Test: The system will be tested multiple times. For each test case, we will observe if the system correctly detected the object. If the total number of frames without detections is greater than 0.3 times the total number of frames, our network must be retrained. 8. The system shall have a probability of false alarm less than 0.3. a. Test: We will run our network in a scenario with that should have no detections. For each detection, we will increment a counter. If this counter is greater than 0.3 times the total number of frames, our network must be retrained. 9. The system shall run off of a 12V power supply. a. Test: This is a requirement that will be determined by the radar and system on a chip selected. 10. The system shall fit inside 1 x1 x1 space. a. Test: The radar and system on a chip must fit within this space. Enclosures designed by our team must also meet this specification. SDDEC
15 11. The system shall detect at least 4 classes of objects. a. Test: Each class will be introduced to the system in a variety of scenarios. 12. The system shall/should operate in the temperature range from -40 to 125 degrees Fahrenheit. a. Test: All individual components purchased must at least have this operating range. SDDEC
16 3 Project Timeline, Estimated Resources, and Challenges 3.1 PROJECT TIMELINE Sprint # Dates Deliverables /08-01/21 01/22-02/04 02/05-02/18 02/19-03/04 03/05-03/25 03/26-04/08 04/09-04/22 04/23-05/04 Schedule and Roles: We will be solidifying our schedule, roles, responsibilities, and allotting times for meetings. We will be discussing individual positions and we will be assigning tasks and deadlines for specific portions of the project. Target parameters, system requirements, and website: We will be working on improving our website. We will continue to updates documents and responsibilities, which will be published. We will compile a system requirements to know what hardware we require to run processes. We will also be solidifying our choice for Radar during this time so we may begin testing. Final Selections: Our team will have decided on which radars are suitable, the deep learning platform, and what kind of system on a chip (SOC) we will be using as our onboard computer. Once selected, we can begin the testing process to narrow down a final combination of the three components. Testing: In this portion of our project, we will actually begin to run tests on our final radar/platform/soc combination to see how it fares and to see if the real world results are what we expected. If our expectations are met or exceeded, we will proceed and begin to prep out deep learning model and run identification tests. Final Radar and SOC selected: This is the two week slot we have allotted in case we need to rethink our radar/platform/soc combination. If we are satisfied with our primary combination then we will use these two weeks to begin training. Database of Radar Images: As we approach the end of our semester, the team will start collecting data and classifying it to run it through our deep learning platform so we can identify various radar signals as objects. Deep learning model: Once the database is complete we will run it through the deep learning model we selected. When it is ready, we can begin to load it onto our SOC to test it with real objects in front of it. Port data from radar to deep learning model: We will send the collection of data from the radar to the SOC to be run through the neural network. This way we can improve the accuracy of the net while building a bigger database. SDDEC
17 3.2 FEASIBILITY ASSESSMENT We know of some major aspects where we know to be careful. We need to ensure that we remain within the scope of the project. We only want to focus on getting the deep learning model and the radar to work. If we begin to spend too much time on alternative forms of detection, we will be in over our heads. Therefore, we must implement and follow strict constraints. Our radar and SOC also need to be feasible. To achieve this, we are choosing the most economically sound option for our project. We do not want to cut corners and choose cheap products, but at the same time we also do not want to be spending tens of thousands of dollars and hundreds of hours into the project. Along the way, we will consult our faculty advisor, client, and team members to ensure the products we choose are of the best quality with the most reasonable price tag. 3.3 PERSONNEL EFFORT REQUIREMENTS This information is found on our GitLab page. Each action item includes dates, assignees, and details all listed out the Issue Board section of our Git. 3.4 OTHER RESOURCE REQUIREMENTS We will need to know how radars work. We will also need to understand how deep learning neural nets work, as well as how to use them with Python. For all of this information, we will be using YouTube, textbooks, and how-to books (ie. For Dummies series) as resources. We will also require some storage space, such as a server, for all the test data we use and collect. In addition to this, when we are close to the end of our project, we will need heavy equipment and a test area to see how our technology fares in the real world. 3.5 FINANCIAL REQUIREMENTS We will need to purchase RADAR and a controller to go with it. We will also require funding for the server if we need it. Our major expenses are the radar unit itself and the controller. SDDEC
18 4 Closure Materials 4.1 CONCLUSION Our project is to develop a system for Danfoss to use on machinery such as tractors, loaders, excavators, and other heavy equipment that can use radar to detect objects. We will be utilizing deep learning to recognize objects in order for these vehicles to determine if there is a hazard in range of the radar. We decided to use the Delphi RADAR because of its better range and wider field of view. This RADAR will be connected along with a camera to the Jetson TX2 computer which will then process the data and output our display to the LCD monitor in the cab of the machine. We hope to create a device that we can put into testing on Danfoss test track in Ames in order to show leadership and engineers from Danfoss the work we have accomplished and the system we have created. With our collected data from this radar use deep learning to help decipher whether the objects in the view of the radar are a hazard or are not a hazard. This will then appear on the LCD with the classification of the object, and whether this object will be in the path of the vehicle or just a general potential problem. With all of this accomplished we will have tested a new technology for Danfoss. This technology can help make safer working conditions and future autonomous operation possible. Hopefully, this technology will be feasible for future development into a product for our client, and a safer society surrounding the machinery our system is implemented on. SDDEC
19 4.2 REFERENCES [1] E. Mason, B. Yonel and B. Yazici, "Deep learning for radar," 2017 IEEE Radar Conference (RadarConf), Seattle, WA, 2017, pp doi: /RADAR Stewart, Louis. RadarCat for Object Recognition. SACHI, sachi.cs.st-andrews.ac.uk/research/interaction/radarcat-exploits-googles-soliradar -sensor-for-object-and-material-recognition/. Van Rossum, Guido. PEP 8 -- Style Guide for Python Code. Python.org, 1 Aug. 2013, Xu, Joyce. Deep Learning for Object Detection: A Comprehensive Review. Towards Data Science, Towards Data Science, 11 Sept. 2017, towardsdatascience.com/deep-learning-for-object-detection-a-comprehensivereview d8d APPENDICES SDDEC

20 SDDEC

21 SDDEC
22 SDDEC

23 SDDEC
Object Detection and Identification with Sensor Fusion DESIGN DOCUMENT
 Object Detection and Identification with Sensor Fusion DESIGN DOCUMENT #18 Client: Michael Olson - Danfoss Advisor: Dr. Wang Tucker Creger - Project Manager Kellen O Connor - Deep Learning Architect Eric
Object Detection and Identification with Sensor Fusion DESIGN DOCUMENT #18 Client: Michael Olson - Danfoss Advisor: Dr. Wang Tucker Creger - Project Manager Kellen O Connor - Deep Learning Architect Eric
TOTAL DETECTOR COLLISION AVOIDANCE SYSTEM by Janus Technologies S.L. and Clock Technology S.L.
 TOTAL DETECTOR COLLISION AVOIDANCE SYSTEM by Janus Technologies S.L. and Clock Technology S.L. RFID fundamentals System overview Loader setup Dumper setup Excavator setup Custom made options Price and
TOTAL DETECTOR COLLISION AVOIDANCE SYSTEM by Janus Technologies S.L. and Clock Technology S.L. RFID fundamentals System overview Loader setup Dumper setup Excavator setup Custom made options Price and
High Current Pulse Generator for the Application of Transcranial Magnetic Stimulation PROJECT PLAN
 High Current Pulse Generator for the Application of Transcranial Magnetic Stimulation PROJECT PLAN Team Number: SD-04 Client: Dr. Mani Mina Advisers: Joseph Zambreno J.P. Rakash Dr. Mani Mina Neelam Prabhu
High Current Pulse Generator for the Application of Transcranial Magnetic Stimulation PROJECT PLAN Team Number: SD-04 Client: Dr. Mani Mina Advisers: Joseph Zambreno J.P. Rakash Dr. Mani Mina Neelam Prabhu
ARGUING THE SAFETY OF MACHINE LEARNING FOR HIGHLY AUTOMATED DRIVING USING ASSURANCE CASES LYDIA GAUERHOF BOSCH CORPORATE RESEARCH
 ARGUING THE SAFETY OF MACHINE LEARNING FOR HIGHLY AUTOMATED DRIVING USING ASSURANCE CASES 14.12.2017 LYDIA GAUERHOF BOSCH CORPORATE RESEARCH Arguing Safety of Machine Learning for Highly Automated Driving
ARGUING THE SAFETY OF MACHINE LEARNING FOR HIGHLY AUTOMATED DRIVING USING ASSURANCE CASES 14.12.2017 LYDIA GAUERHOF BOSCH CORPORATE RESEARCH Arguing Safety of Machine Learning for Highly Automated Driving
138kV / 13.8kV Substation Protection and Control Design Project
 138kV / 13.8kV Substation Protection and Control Design Project Final Report Team Client Team Advisor Team Members Team Email Team Website : sdmay18-06 : Black & Veatch :Dr. Ajjarapu : Andrew Brown Gavin
138kV / 13.8kV Substation Protection and Control Design Project Final Report Team Client Team Advisor Team Members Team Email Team Website : sdmay18-06 : Black & Veatch :Dr. Ajjarapu : Andrew Brown Gavin
AUTONOMOUS MAN-OVERBOARD DETECTION AND TRACKING
 AUTONOMOUS MAN-OVERBOARD DETECTION AND TRACKING THE SYSTEM AUTONOMOUS MAN-OVERBOARD DETECTION & TRACKING The MOBtronic man-overboard system operates autonomously, instantly detecting and classifying a
AUTONOMOUS MAN-OVERBOARD DETECTION AND TRACKING THE SYSTEM AUTONOMOUS MAN-OVERBOARD DETECTION & TRACKING The MOBtronic man-overboard system operates autonomously, instantly detecting and classifying a
Senior Design I. Fast Acquisition and Real-time Tracking Vehicle. University of Central Florida
 Senior Design I Fast Acquisition and Real-time Tracking Vehicle University of Central Florida College of Engineering Department of Electrical Engineering Inventors: Seth Rhodes Undergraduate B.S.E.E. Houman
Senior Design I Fast Acquisition and Real-time Tracking Vehicle University of Central Florida College of Engineering Department of Electrical Engineering Inventors: Seth Rhodes Undergraduate B.S.E.E. Houman
FLASH LiDAR KEY BENEFITS
 In 2013, 1.2 million people died in vehicle accidents. That is one death every 25 seconds. Some of these lives could have been saved with vehicles that have a better understanding of the world around them
In 2013, 1.2 million people died in vehicle accidents. That is one death every 25 seconds. Some of these lives could have been saved with vehicles that have a better understanding of the world around them
Bluetooth Low Energy Sensing Technology for Proximity Construction Applications
 Bluetooth Low Energy Sensing Technology for Proximity Construction Applications JeeWoong Park School of Civil and Environmental Engineering, Georgia Institute of Technology, 790 Atlantic Dr. N.W., Atlanta,
Bluetooth Low Energy Sensing Technology for Proximity Construction Applications JeeWoong Park School of Civil and Environmental Engineering, Georgia Institute of Technology, 790 Atlantic Dr. N.W., Atlanta,
Silicon radars and smart algorithms - disruptive innovation in perceptive IoT systems Andy Dewilde PUBLIC
 Silicon radars and smart algorithms - disruptive innovation in perceptive IoT systems Andy Dewilde PUBLIC Fietser in levensgevaar na ongeval met vrachtwagen op Louizaplein Het Laatste Nieuws 16/06/2017
Silicon radars and smart algorithms - disruptive innovation in perceptive IoT systems Andy Dewilde PUBLIC Fietser in levensgevaar na ongeval met vrachtwagen op Louizaplein Het Laatste Nieuws 16/06/2017
OPTIMIZATION OF A CHECK FRAUD VERIFICATION SYSTEM
 OPTIMIZATION OF A CHECK FRAUD VERIFICATION SYSTEM John Campbell 1, David Clothier 1, Antonio Mendoza 1, Lisa Dildine 1, Vijay Vaidyanathan 1 and Andy DeLong 2 Abstract Background: Check fraud is a critical
OPTIMIZATION OF A CHECK FRAUD VERIFICATION SYSTEM John Campbell 1, David Clothier 1, Antonio Mendoza 1, Lisa Dildine 1, Vijay Vaidyanathan 1 and Andy DeLong 2 Abstract Background: Check fraud is a critical
Physics Based Sensor simulation
 Physics Based Sensor simulation Jordan Gorrochotegui - Product Manager Software and Services Mike Phillips Software Engineer Restricted Siemens AG 2017 Realize innovation. Siemens offers solutions across
Physics Based Sensor simulation Jordan Gorrochotegui - Product Manager Software and Services Mike Phillips Software Engineer Restricted Siemens AG 2017 Realize innovation. Siemens offers solutions across
Embedded Test System. Design and Implementation of Digital to Analog Converter. TEAM BIG HERO 3 John Sopczynski Karim Shik-Khahil Yanzhe Zhao
 Embedded Test System Design and Implementation of Digital to Analog Converter TEAM BIG HERO 3 John Sopczynski Karim Shik-Khahil Yanzhe Zhao EE 300W Section 1 Spring 2015 Big Hero 3 DAC 2 INTRODUCTION (KS)
Embedded Test System Design and Implementation of Digital to Analog Converter TEAM BIG HERO 3 John Sopczynski Karim Shik-Khahil Yanzhe Zhao EE 300W Section 1 Spring 2015 Big Hero 3 DAC 2 INTRODUCTION (KS)
FPGA-BASED HARDWARE EMULATION ARCADE SYSTEM PROJECT PLAN
 FPGA-BASED HARDWARE EMULATION ARCADE SYSTEM PROJECT PLAN May 11-14 Tony Milosch, Cory Mohling, Danny Funk, David Gartner, John Alexander Client: Joseph Zambreno Advisor: Phillip Jones TABLE OF CONTENTS
FPGA-BASED HARDWARE EMULATION ARCADE SYSTEM PROJECT PLAN May 11-14 Tony Milosch, Cory Mohling, Danny Funk, David Gartner, John Alexander Client: Joseph Zambreno Advisor: Phillip Jones TABLE OF CONTENTS
Blind Spot Monitor Vehicle Blind Spot Monitor
 Blind Spot Monitor Vehicle Blind Spot Monitor List of Authors (Tim Salanta, Tejas Sevak, Brent Stelzer, Shaun Tobiczyk) Electrical and Computer Engineering Department School of Engineering and Computer
Blind Spot Monitor Vehicle Blind Spot Monitor List of Authors (Tim Salanta, Tejas Sevak, Brent Stelzer, Shaun Tobiczyk) Electrical and Computer Engineering Department School of Engineering and Computer
Standard Development Timeline
 Standard Development Timeline This section is maintained by the drafting team during the development of the standard and will be removed when the standard is adopted by the Board of Trustees. Description
Standard Development Timeline This section is maintained by the drafting team during the development of the standard and will be removed when the standard is adopted by the Board of Trustees. Description
SPEED MEASUREMENT PRODUCTS
 SPEED MEASUREMENT PRODUCTS RADAR LIDAR SPEED SIGNS & TRAILERS MESSAGE TRAILERS An officer enforces speeds with the new MPH Sure Shot hand-held laser. See the NEW SURE SHOT Page 8 Contents Dash Mounted
SPEED MEASUREMENT PRODUCTS RADAR LIDAR SPEED SIGNS & TRAILERS MESSAGE TRAILERS An officer enforces speeds with the new MPH Sure Shot hand-held laser. See the NEW SURE SHOT Page 8 Contents Dash Mounted
IOT Based Landslide Detection & Prevention System
 IOT Based Landslide Detection & Prevention System Jadhav Kanchan eknath, Nalegaonkar Abhilash Dashrath, Salunke Vaishnavi Pandurang, Rajole Savita Dinkar 1 Author, computer Department, Matoshri college
IOT Based Landslide Detection & Prevention System Jadhav Kanchan eknath, Nalegaonkar Abhilash Dashrath, Salunke Vaishnavi Pandurang, Rajole Savita Dinkar 1 Author, computer Department, Matoshri college
NEOLINE. X-COP 9100s. International Hybrid device DVR with GPS & Radar detector
 NEOLINE X-COP 9100s International Hybrid device DVR with GPS & Radar detector NEOLINE X-COP 9100s Neoline X-COP 9100s is the world s first hybrid with an unique international radar platform for detection
NEOLINE X-COP 9100s International Hybrid device DVR with GPS & Radar detector NEOLINE X-COP 9100s Neoline X-COP 9100s is the world s first hybrid with an unique international radar platform for detection
Instrument Cluster Display. Grant Scott III Erin Lawler Mike Carlson
 Instrument Cluster Display Grant Scott III Erin Lawler Mike Carlson ECE 570 December 4 th, 2014 Presentation Outline Introduction and Motivation Features Temperature Sensing LCD Display Fahrenheit/Celsius
Instrument Cluster Display Grant Scott III Erin Lawler Mike Carlson ECE 570 December 4 th, 2014 Presentation Outline Introduction and Motivation Features Temperature Sensing LCD Display Fahrenheit/Celsius
Evaluation of Connected Vehicle Technology for Concept Proposal Using V2X Testbed
 AUTOMOTIVE Evaluation of Connected Vehicle Technology for Concept Proposal Using V2X Testbed Yoshiaki HAYASHI*, Izumi MEMEZAWA, Takuji KANTOU, Shingo OHASHI, and Koichi TAKAYAMA ----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
AUTOMOTIVE Evaluation of Connected Vehicle Technology for Concept Proposal Using V2X Testbed Yoshiaki HAYASHI*, Izumi MEMEZAWA, Takuji KANTOU, Shingo OHASHI, and Koichi TAKAYAMA ----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
High Current Pulse Generator for the Application of Transcranial Magnetic Stimulation PROJECT PLAN
 High Current Pulse Generator for the Application of Transcranial Magnetic Stimulation PROJECT PLAN Team Number: SD-04 Client: Dr. Mani Mina Advisers: Dr. Joseph Zambreno Dr. Mani Mina Jayaprakash Selvaraj
High Current Pulse Generator for the Application of Transcranial Magnetic Stimulation PROJECT PLAN Team Number: SD-04 Client: Dr. Mani Mina Advisers: Dr. Joseph Zambreno Dr. Mani Mina Jayaprakash Selvaraj
INSTRUCTION MANUAL INF Fax: (503)
") INSTRUCTION MANUAL INF151 1-800-547-5740 Fax: (503) 643-6322 www.ueiautomotive.com email: info@ueitest.com Introduction Congratulations on your purchase of the INF151 infrared thermometer. Like all UEi
INSTRUCTION MANUAL INF151 1-800-547-5740 Fax: (503) 643-6322 www.ueiautomotive.com email: info@ueitest.com Introduction Congratulations on your purchase of the INF151 infrared thermometer. Like all UEi
Technical Datasheet. Blaxtair is an intelligent cameraa with the ability to generate alarms when a pedestrian is detected
 BlaXtair 1 Product Overview Technical Datasheet Figure 1 Blaxtair sensor head Blaxtair is an intelligent cameraa with the ability to generate alarms when a pedestrian is detected in a predefined area.
BlaXtair 1 Product Overview Technical Datasheet Figure 1 Blaxtair sensor head Blaxtair is an intelligent cameraa with the ability to generate alarms when a pedestrian is detected in a predefined area.
High Current Pulse Generator for the Application of Transcranial Magnetic Stimulation PROJECT PLAN
 High Current Pulse Generator for the Application of Transcranial Magnetic Stimulation PROJECT PLAN Team Number: SD-04 Client: Dr. Mani Mina Advisers: Dr. Joseph Zambreno Dr. Mani Mina Jayaprakash Selvaraj
High Current Pulse Generator for the Application of Transcranial Magnetic Stimulation PROJECT PLAN Team Number: SD-04 Client: Dr. Mani Mina Advisers: Dr. Joseph Zambreno Dr. Mani Mina Jayaprakash Selvaraj
SCOE SIMULATION. Pascal CONRATH (1), Christian ABEL (1)
, Christian ABEL (1)") SCOE SIMULATION Pascal CONRATH (1), Christian ABEL (1) Clemessy Switzerland AG (1) Gueterstrasse 86b 4053 Basel, Switzerland E-mail: p.conrath@clemessy.com, c.abel@clemessy.com ABSTRACT During the last
SCOE SIMULATION Pascal CONRATH (1), Christian ABEL (1) Clemessy Switzerland AG (1) Gueterstrasse 86b 4053 Basel, Switzerland E-mail: p.conrath@clemessy.com, c.abel@clemessy.com ABSTRACT During the last
Perception platform and fusion modules results. Angelos Amditis - ICCS and Lali Ghosh - DEL interactive final event
 Perception platform and fusion modules results Angelos Amditis - ICCS and Lali Ghosh - DEL interactive final event 20 th -21 st November 2013 Agenda Introduction Environment Perception in Intelligent Transport
Perception platform and fusion modules results Angelos Amditis - ICCS and Lali Ghosh - DEL interactive final event 20 th -21 st November 2013 Agenda Introduction Environment Perception in Intelligent Transport
Automated Planetary Terrain Mapping of Mars Using Image Pattern Recognition
 Automated Planetary Terrain Mapping of Mars Using Image Pattern Recognition Design Document Version 2.0 Team Strata: Sean Baquiro Matthew Enright Jorge Felix Tsosie Schneider 2 Table of Contents 1 Introduction.3
Automated Planetary Terrain Mapping of Mars Using Image Pattern Recognition Design Document Version 2.0 Team Strata: Sean Baquiro Matthew Enright Jorge Felix Tsosie Schneider 2 Table of Contents 1 Introduction.3
(Circuits Subject to Requirements R1 R5) Generator Owner with load-responsive phase protection systems as described in
 Generator Owner with load-responsive phase protection systems as described in") A. Introduction 1. Title: Transmission Relay Loadability 2. Number: PRC-023-3 3. Purpose: Protective relay settings shall not limit transmission loadability; not interfere with system operators ability
A. Introduction 1. Title: Transmission Relay Loadability 2. Number: PRC-023-3 3. Purpose: Protective relay settings shall not limit transmission loadability; not interfere with system operators ability
UNIT-III LIFE-CYCLE PHASES
 INTRODUCTION: UNIT-III LIFE-CYCLE PHASES - If there is a well defined separation between research and development activities and production activities then the software is said to be in successful development
INTRODUCTION: UNIT-III LIFE-CYCLE PHASES - If there is a well defined separation between research and development activities and production activities then the software is said to be in successful development
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS. Sergii Bykov Technical Lead Machine Learning 12 Oct 2017
 23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
TAG5000 WIRELESS PHASER. Instruction Manual HD ELECTRIC COMPANY 1475 LAKESIDE DRIVE WAUKEGAN, ILLINOIS U.S.A.
 TAG5000 WIRELESS PHASER Instruction Manual TM HD ELECTRIC COMPANY 1475 LAKESIDE DRIVE WAUKEGAN, ILLINOIS 60085 U.S.A. PHONE 847.473.4980 FAX 847.473.4981 website: www.hdelectriccompany.com DESCRIPTION
TAG5000 WIRELESS PHASER Instruction Manual TM HD ELECTRIC COMPANY 1475 LAKESIDE DRIVE WAUKEGAN, ILLINOIS 60085 U.S.A. PHONE 847.473.4980 FAX 847.473.4981 website: www.hdelectriccompany.com DESCRIPTION
CHC MINING DEFORMATION MONITORING SOLUTION
 CHC MINING DEFORMATION MONITORING SOLUTION Safety is first in mining. CHC offers solutions designed to improve safety for personnel on the ground and in the cab with 24/7 precision positioning for automatic
CHC MINING DEFORMATION MONITORING SOLUTION Safety is first in mining. CHC offers solutions designed to improve safety for personnel on the ground and in the cab with 24/7 precision positioning for automatic
Choosing the Optimum Mix of Sensors for Driver Assistance and Autonomous Vehicles
 Choosing the Optimum Mix of Sensors for Driver Assistance and Autonomous Vehicles Ali Osman Ors May 2, 2017 Copyright 2017 NXP Semiconductors 1 Sensing Technology Comparison Rating: H = High, M=Medium,
Choosing the Optimum Mix of Sensors for Driver Assistance and Autonomous Vehicles Ali Osman Ors May 2, 2017 Copyright 2017 NXP Semiconductors 1 Sensing Technology Comparison Rating: H = High, M=Medium,
26 Firemens Memorial Drive, Suite 105, Pomona, NY P: /
 26 Firemens Memorial Drive, Suite 105, Pomona, NY 10970 P: 845.369.6324 / www.bhsensors.com TECHNICAL VISION: BH Sensors is responding to a growing need for advanced, accurate, cost effective, highly reliable
26 Firemens Memorial Drive, Suite 105, Pomona, NY 10970 P: 845.369.6324 / www.bhsensors.com TECHNICAL VISION: BH Sensors is responding to a growing need for advanced, accurate, cost effective, highly reliable
Automated Testing of Autonomous Driving Assistance Systems
 Automated Testing of Autonomous Driving Assistance Systems Lionel Briand Vector Testing Symposium, Stuttgart, 2018 SnT Centre Top level research in Information & Communication Technologies Created to fuel
Automated Testing of Autonomous Driving Assistance Systems Lionel Briand Vector Testing Symposium, Stuttgart, 2018 SnT Centre Top level research in Information & Communication Technologies Created to fuel
Proposal Smart Vision Sensors for Entomologically Inspired Micro Aerial Vehicles Daniel Black. Advisor: Dr. Reid Harrison
 Proposal Smart Vision Sensors for Entomologically Inspired Micro Aerial Vehicles Daniel Black Advisor: Dr. Reid Harrison Introduction Impressive digital imaging technology has become commonplace in our
Proposal Smart Vision Sensors for Entomologically Inspired Micro Aerial Vehicles Daniel Black Advisor: Dr. Reid Harrison Introduction Impressive digital imaging technology has become commonplace in our
March 10, Greenbelt Road, Suite 400, Greenbelt, MD Tel: (301) Fax: (301)
 Fax: (301)") Detection of High Risk Intersections Using Synthetic Machine Vision John Alesse, john.alesse.ctr@dot.gov Brian O Donnell, brian.odonnell.ctr@dot.gov Stinger Ghaffarian Technologies, Inc. Cambridge, Massachusetts
Detection of High Risk Intersections Using Synthetic Machine Vision John Alesse, john.alesse.ctr@dot.gov Brian O Donnell, brian.odonnell.ctr@dot.gov Stinger Ghaffarian Technologies, Inc. Cambridge, Massachusetts
Technology Roadmapping. Lesson 3
 Technology Roadmapping Lesson 3 Leadership in Science & Technology Management Mission Vision Strategy Goals/ Implementation Strategy Roadmap Creation Portfolios Portfolio Roadmap Creation Project Prioritization
Technology Roadmapping Lesson 3 Leadership in Science & Technology Management Mission Vision Strategy Goals/ Implementation Strategy Roadmap Creation Portfolios Portfolio Roadmap Creation Project Prioritization
Fixtures for Production of Modular Weld Tables
 TSM 416 Technology Capstone Projects Undergraduate Theses and Capstone Projects 4-28-2017 Fixtures for Production of Modular Weld Tables Jeremy Andersen Iowa State University, jeremya@iastate.edu Cameron
TSM 416 Technology Capstone Projects Undergraduate Theses and Capstone Projects 4-28-2017 Fixtures for Production of Modular Weld Tables Jeremy Andersen Iowa State University, jeremya@iastate.edu Cameron
Signal Integrity Management in an SoC Physical Design Flow
 Signal Integrity Management in an SoC Physical Design Flow Murat Becer Ravi Vaidyanathan Chanhee Oh Rajendran Panda Motorola, Inc., Austin, TX Presenter: Rajendran Panda Talk Outline Functional and Delay
Signal Integrity Management in an SoC Physical Design Flow Murat Becer Ravi Vaidyanathan Chanhee Oh Rajendran Panda Motorola, Inc., Austin, TX Presenter: Rajendran Panda Talk Outline Functional and Delay
Wireless Sensor Network for Intra-Venous Fluid Level Indicator Application
 Wireless Sensor Network for Intra-Venous Fluid Level Indicator Application Abstract Wireless sensor networks use small, low-cost embedded devices for a wide range of applications such as industrial data
Wireless Sensor Network for Intra-Venous Fluid Level Indicator Application Abstract Wireless sensor networks use small, low-cost embedded devices for a wide range of applications such as industrial data
David Howarth. Business Development Manager Americas
 David Howarth Business Development Manager Americas David Howarth IPG Automotive USA, Inc. Business Development Manager Americas david.howarth@ipg-automotive.com ni.com Testing Automated Driving Functions
David Howarth Business Development Manager Americas David Howarth IPG Automotive USA, Inc. Business Development Manager Americas david.howarth@ipg-automotive.com ni.com Testing Automated Driving Functions
Israel Railways No Fault Liability Renewal The Implementation of New Technological Safety Devices at Level Crossings. Amos Gellert, Nataly Kats
 Mr. Amos Gellert Technological aspects of level crossing facilities Israel Railways No Fault Liability Renewal The Implementation of New Technological Safety Devices at Level Crossings Deputy General Manager
Mr. Amos Gellert Technological aspects of level crossing facilities Israel Railways No Fault Liability Renewal The Implementation of New Technological Safety Devices at Level Crossings Deputy General Manager
TECHNOLOGY DEVELOPMENT AREAS IN AAWA
 TECHNOLOGY DEVELOPMENT AREAS IN AAWA Technologies for realizing remote and autonomous ships exist. The task is to find the optimum way to combine them reliably and cost effecticely. Ship state definition
TECHNOLOGY DEVELOPMENT AREAS IN AAWA Technologies for realizing remote and autonomous ships exist. The task is to find the optimum way to combine them reliably and cost effecticely. Ship state definition
Sandia National Laboratories Clinic Team
 Sandia National Laboratories Clinic Team Matt Strum (Zach Smart, Jake Scheid, Jacob Fawson, and Ali Aldarwish) Advisor Behrouz Farhang Final Project Proposal May 4, 2011 Contents Functional Description...
Sandia National Laboratories Clinic Team Matt Strum (Zach Smart, Jake Scheid, Jacob Fawson, and Ali Aldarwish) Advisor Behrouz Farhang Final Project Proposal May 4, 2011 Contents Functional Description...
Solar Mobius Final Report. Team 1821 Members: Advisor. Sponsor
 Senior Design II ECE 4902 Spring 2018 Solar Mobius Final Report Team 1821 Members: James Fisher (CMPE) David Pettibone (EE) George Oppong (EE) Advisor Professor Ali Bazzi Sponsor University of Connecticut
Senior Design II ECE 4902 Spring 2018 Solar Mobius Final Report Team 1821 Members: James Fisher (CMPE) David Pettibone (EE) George Oppong (EE) Advisor Professor Ali Bazzi Sponsor University of Connecticut
PhD Student Mentoring Committee Department of Electrical and Computer Engineering Rutgers, The State University of New Jersey
 PhD Student Mentoring Committee Department of Electrical and Computer Engineering Rutgers, The State University of New Jersey Some Mentoring Advice for PhD Students In completing a PhD program, your most
PhD Student Mentoring Committee Department of Electrical and Computer Engineering Rutgers, The State University of New Jersey Some Mentoring Advice for PhD Students In completing a PhD program, your most
COMPACT GUIDE. Camera-Integrated Motion Analysis
 EN 06/13 COMPACT GUIDE Camera-Integrated Motion Analysis Detect the movement of people and objects Filter according to directions of movement Fast, simple configuration Reliable results, even in the event
EN 06/13 COMPACT GUIDE Camera-Integrated Motion Analysis Detect the movement of people and objects Filter according to directions of movement Fast, simple configuration Reliable results, even in the event
High Current Pulse Generator for the Application of Transcranial Magnetic Stimulation
 High Current Pulse Generator for the Application of Transcranial Magnetic Stimulation DESIGN DOCUMENT Team Number: SD-04 Client: Dr. Mani Mina Advisers: Dr. Joseph Zambreno Dr. Mani Mina Jayaprakash Selvaraj
High Current Pulse Generator for the Application of Transcranial Magnetic Stimulation DESIGN DOCUMENT Team Number: SD-04 Client: Dr. Mani Mina Advisers: Dr. Joseph Zambreno Dr. Mani Mina Jayaprakash Selvaraj
Army Acoustics Needs
 Army Acoustics Needs DARPA Air-Coupled Acoustic Micro Sensors Workshop by Nino Srour Aug 25, 1999 US Attn: AMSRL-SE-SA 2800 Powder Mill Road Adelphi, MD 20783-1197 Tel: (301) 394-2623 Email: nsrour@arl.mil
Army Acoustics Needs DARPA Air-Coupled Acoustic Micro Sensors Workshop by Nino Srour Aug 25, 1999 US Attn: AMSRL-SE-SA 2800 Powder Mill Road Adelphi, MD 20783-1197 Tel: (301) 394-2623 Email: nsrour@arl.mil
AC : MICROPROCESSOR BASED, GLOBAL POSITIONING SYSTEM GUIDED ROBOT IN A PROJECT LABORATORY
 AC 2007-2528: MICROPROCESSOR BASED, GLOBAL POSITIONING SYSTEM GUIDED ROBOT IN A PROJECT LABORATORY Michael Parten, Texas Tech University Michael Giesselmann, Texas Tech University American Society for
AC 2007-2528: MICROPROCESSOR BASED, GLOBAL POSITIONING SYSTEM GUIDED ROBOT IN A PROJECT LABORATORY Michael Parten, Texas Tech University Michael Giesselmann, Texas Tech University American Society for
DENSO www. densocorp-na.com
 DENSO www. densocorp-na.com Machine Learning for Automated Driving Description of Project DENSO is one of the biggest tier one suppliers in the automotive industry, and one of its main goals is to provide
DENSO www. densocorp-na.com Machine Learning for Automated Driving Description of Project DENSO is one of the biggest tier one suppliers in the automotive industry, and one of its main goals is to provide
Responsible Data Use Assessment for Public Realm Sensing Pilot with Numina. Overview of the Pilot:
 Responsible Data Use Assessment for Public Realm Sensing Pilot with Numina Overview of the Pilot: Sidewalk Labs vision for people-centred mobility - safer and more efficient public spaces - requires a
Responsible Data Use Assessment for Public Realm Sensing Pilot with Numina Overview of the Pilot: Sidewalk Labs vision for people-centred mobility - safer and more efficient public spaces - requires a
AN0503 Using swarm bee LE for Collision Avoidance Systems (CAS)
") AN0503 Using swarm bee LE for Collision Avoidance Systems (CAS) 1.3 NA-14-0267-0019-1.3 Document Information Document Title: Document Version: 1.3 Current Date: 2016-05-18 Print Date: 2016-05-18 Document
AN0503 Using swarm bee LE for Collision Avoidance Systems (CAS) 1.3 NA-14-0267-0019-1.3 Document Information Document Title: Document Version: 1.3 Current Date: 2016-05-18 Print Date: 2016-05-18 Document
RF System Design and Analysis Software Enhances RF Architectural Planning
 RF System Design and Analysis Software Enhances RF Architectural Planning By Dale D. Henkes Applied Computational Sciences (ACS) Historically, commercial software This new software enables convenient simulation
RF System Design and Analysis Software Enhances RF Architectural Planning By Dale D. Henkes Applied Computational Sciences (ACS) Historically, commercial software This new software enables convenient simulation
2. Measurement Range / Further specifications of the LOG_aLevel system
 1. Introduction General Acoustics, e.k., founded in 1996, with its origins as an acoustics and sensors research and services partnership, is now a high-end technology producer of sophisticated water level
1. Introduction General Acoustics, e.k., founded in 1996, with its origins as an acoustics and sensors research and services partnership, is now a high-end technology producer of sophisticated water level
Optical Delay Line Application Note
 1 Optical Delay Line Application Note 1.1 General Optical delay lines system (ODL), incorporates a high performance lasers such as DFBs, optical modulators for high operation frequencies, photodiodes,
1 Optical Delay Line Application Note 1.1 General Optical delay lines system (ODL), incorporates a high performance lasers such as DFBs, optical modulators for high operation frequencies, photodiodes,
AC : THE UBIQUITOUS MICROCONTROLLER IN MECHANICAL ENGINEERING: MEASUREMENT SYSTEMS
 AC 8-1513: THE UBIQUITOUS MICROCONTROLLER IN MECHANICAL ENGINEERING: MEASUREMENT SYSTEMS Michael Holden, California Maritime Academy Michael Holden teaches in the department of Mechanical Engineering at
AC 8-1513: THE UBIQUITOUS MICROCONTROLLER IN MECHANICAL ENGINEERING: MEASUREMENT SYSTEMS Michael Holden, California Maritime Academy Michael Holden teaches in the department of Mechanical Engineering at
Machine Learning Practical Part 2: Group Projects. MLP Lecture 11 MLP Part 2: Group Projects 1
 Machine Learning Practical Part 2: Group Projects MLP Lecture 11 MLP Part 2: Group Projects 1 MLP Part 2: Group Projects Steve Renals Machine Learning Practical MLP Lecture 11 24 January 2018 http://www.inf.ed.ac.uk/teaching/courses/mlp/
Machine Learning Practical Part 2: Group Projects MLP Lecture 11 MLP Part 2: Group Projects 1 MLP Part 2: Group Projects Steve Renals Machine Learning Practical MLP Lecture 11 24 January 2018 http://www.inf.ed.ac.uk/teaching/courses/mlp/
TECHNICAL RISK ASSESSMENT: INCREASING THE VALUE OF TECHNOLOGY READINESS ASSESSMENT (TRA)
") TECHNICAL RISK ASSESSMENT: INCREASING THE VALUE OF TECHNOLOGY READINESS ASSESSMENT (TRA) Rebecca Addis Systems Engineering Tank Automotive Research, Development, and Engineering Center (TARDEC) Warren,
TECHNICAL RISK ASSESSMENT: INCREASING THE VALUE OF TECHNOLOGY READINESS ASSESSMENT (TRA) Rebecca Addis Systems Engineering Tank Automotive Research, Development, and Engineering Center (TARDEC) Warren,
Robust Positioning for Urban Traffic
 Robust Positioning for Urban Traffic Motivations and Activity plan for the WG 4.1.4 Dr. Laura Ruotsalainen Research Manager, Department of Navigation and positioning Finnish Geospatial Research Institute
Robust Positioning for Urban Traffic Motivations and Activity plan for the WG 4.1.4 Dr. Laura Ruotsalainen Research Manager, Department of Navigation and positioning Finnish Geospatial Research Institute
Policy-Based RTL Design
 Policy-Based RTL Design Bhanu Kapoor and Bernard Murphy bkapoor@atrenta.com Atrenta, Inc., 2001 Gateway Pl. 440W San Jose, CA 95110 Abstract achieving the desired goals. We present a new methodology to
Policy-Based RTL Design Bhanu Kapoor and Bernard Murphy bkapoor@atrenta.com Atrenta, Inc., 2001 Gateway Pl. 440W San Jose, CA 95110 Abstract achieving the desired goals. We present a new methodology to
Team Autono-Mo. Jacobia. Department of Computer Science and Engineering The University of Texas at Arlington
 Department of Computer Science and Engineering The University of Texas at Arlington Team Autono-Mo Jacobia Architecture Design Specification Team Members: Bill Butts Darius Salemizadeh Lance Storey Yunesh
Department of Computer Science and Engineering The University of Texas at Arlington Team Autono-Mo Jacobia Architecture Design Specification Team Members: Bill Butts Darius Salemizadeh Lance Storey Yunesh
Prototyping Vision-Based Classifiers in Constrained Environments
 Prototyping Vision-Based Classifiers in Constrained Environments Ted Hromadka 1 and Cameron Hunt 2 1, 2 SOFWERX (DEFENSEWERX, Inc.) Presented at GTC 2018 Company Overview SM UNCLASSIFIED 2 Capabilities
Prototyping Vision-Based Classifiers in Constrained Environments Ted Hromadka 1 and Cameron Hunt 2 1, 2 SOFWERX (DEFENSEWERX, Inc.) Presented at GTC 2018 Company Overview SM UNCLASSIFIED 2 Capabilities
CEEN Bot Lab Design A SENIOR THESIS PROPOSAL
 CEEN Bot Lab Design by Deborah Duran (EENG) Kenneth Townsend (EENG) A SENIOR THESIS PROPOSAL Presented to the Faculty of The Computer and Electronics Engineering Department In Partial Fulfillment of Requirements
CEEN Bot Lab Design by Deborah Duran (EENG) Kenneth Townsend (EENG) A SENIOR THESIS PROPOSAL Presented to the Faculty of The Computer and Electronics Engineering Department In Partial Fulfillment of Requirements
MOBILIZE REALTIME INFORMATION SEAMLESSLY ACROSS YOUR OPERATION CONNECT PERSONNEL MORE SAFELY AND EFFICIENTLY WITH OUR MISSION CRITICAL SOLUTIONS
 MOBILIZE REALTIME INFORMATION SEAMLESSLY ACROSS YOUR OPERATION CONNECT PERSONNEL MORE SAFELY AND EFFICIENTLY WITH OUR MISSION CRITICAL SOLUTIONS PROTECT WORKERS IN HAZARDOUS ENVIRONMENTS Oil and gas companies
MOBILIZE REALTIME INFORMATION SEAMLESSLY ACROSS YOUR OPERATION CONNECT PERSONNEL MORE SAFELY AND EFFICIENTLY WITH OUR MISSION CRITICAL SOLUTIONS PROTECT WORKERS IN HAZARDOUS ENVIRONMENTS Oil and gas companies
Australian Standard. Safety of machinery. Part 1801: Safety distances to prevent danger zones being reached by the upper limbs AS 4024.
 AS 4024.1801 2006 AS 4024.1801 2006 Australian Standard Safety of machinery Part 1801: Safety distances to prevent danger zones being reached by the upper limbs This Australian Standard was prepared by
AS 4024.1801 2006 AS 4024.1801 2006 Australian Standard Safety of machinery Part 1801: Safety distances to prevent danger zones being reached by the upper limbs This Australian Standard was prepared by
Fiber-optic temperature measurement solves HV challenges in e-mobility Tech Article
 Fiber-optic temperature measurement solves HV challenges in e-mobility Tech Article Figure 1: Consistent isolation of the HV environment using FBG technology avoids additional safety measures, qualification
Fiber-optic temperature measurement solves HV challenges in e-mobility Tech Article Figure 1: Consistent isolation of the HV environment using FBG technology avoids additional safety measures, qualification
Controlling Changes Lessons Learned from Waste Management Facilities 8
 Controlling Changes Lessons Learned from Waste Management Facilities 8 B. M. Johnson, A. S. Koplow, F. E. Stoll, and W. D. Waetje Idaho National Engineering Laboratory EG&G Idaho, Inc. Introduction This
Controlling Changes Lessons Learned from Waste Management Facilities 8 B. M. Johnson, A. S. Koplow, F. E. Stoll, and W. D. Waetje Idaho National Engineering Laboratory EG&G Idaho, Inc. Introduction This
IDEAL INDUSTRIES, INC. TECHNICAL MANUAL MODEL:
 IDEAL INDUSTRIES, INC. TECHNICAL MANUAL MODEL: 61-920 The Service Information provides the following information: Precautions and safety information Specifications Performance test procedure Calibration
IDEAL INDUSTRIES, INC. TECHNICAL MANUAL MODEL: 61-920 The Service Information provides the following information: Precautions and safety information Specifications Performance test procedure Calibration
Machinery Health Monitoring and Power Scavenging. Prepared for WMEA. Presented by Lewis Watt November 15 th, 2007
 Machinery Health Monitoring and Power Scavenging Prepared for WMEA Presented by Lewis Watt November 15 th, 2007 RLW, Inc. 2007 All Rights Reserved An Open Platform for Condition Monitoring Any Transducer
Machinery Health Monitoring and Power Scavenging Prepared for WMEA Presented by Lewis Watt November 15 th, 2007 RLW, Inc. 2007 All Rights Reserved An Open Platform for Condition Monitoring Any Transducer
Thomas Hassall Anglican College
 Thomas Hassall Anglican College Notification of Year 10 Industrial Technology Assessment Task Student Name: DUE DATE: Thursday 28 th March 2013 TOTAL MARKS: Structured 70, Core 85, Extension 100. ASSESSMENT
Thomas Hassall Anglican College Notification of Year 10 Industrial Technology Assessment Task Student Name: DUE DATE: Thursday 28 th March 2013 TOTAL MARKS: Structured 70, Core 85, Extension 100. ASSESSMENT
Prototype to product the difficult transition
 Prototype to product the difficult transition Case: K-Master Thor Hukkelås, M.Sc. Project Manager DP & Nav Product Development Kongsberg Maritime AS WORLD CLASS through people, technology and dedication
Prototype to product the difficult transition Case: K-Master Thor Hukkelås, M.Sc. Project Manager DP & Nav Product Development Kongsberg Maritime AS WORLD CLASS through people, technology and dedication
Escort Passport 9500i
 Escort Passport 9500i Radar Detector with GPS Locator The latest invention, the all-new PASSPORT 9500i, has revolutionized the radar detector category again. Its blistering performance is derived from
Escort Passport 9500i Radar Detector with GPS Locator The latest invention, the all-new PASSPORT 9500i, has revolutionized the radar detector category again. Its blistering performance is derived from
In-line eddy current testing of wire rod
 In-line eddy current testing of wire rod By Dr. Thomas Knöll Dr. Thomas Knöll is Managing Director of, Ismaning, Germany. This article appeared in Millennium Steel Journal 2004 and has been reprinted with
In-line eddy current testing of wire rod By Dr. Thomas Knöll Dr. Thomas Knöll is Managing Director of, Ismaning, Germany. This article appeared in Millennium Steel Journal 2004 and has been reprinted with
TS-700/1000 INVERTER Instruction Manual
 TS-700/1000 INVERTER Instruction Manual TS-700/1000 Instruction Manual Index 1. Safety Guidelines... 1 2. Introduction... 1 2.1 Features... 1 2.2 Main Specification... 2 3. User Interface... 2 3.1 Front
TS-700/1000 INVERTER Instruction Manual TS-700/1000 Instruction Manual Index 1. Safety Guidelines... 1 2. Introduction... 1 2.1 Features... 1 2.2 Main Specification... 2 3. User Interface... 2 3.1 Front
The 2019 Biometric Technology Rally
 DHS SCIENCE AND TECHNOLOGY The 2019 Biometric Technology Rally Kickoff Webinar, November 5, 2018 Arun Vemury -- DHS S&T Jake Hasselgren, John Howard, and Yevgeniy Sirotin -- The Maryland Test Facility
DHS SCIENCE AND TECHNOLOGY The 2019 Biometric Technology Rally Kickoff Webinar, November 5, 2018 Arun Vemury -- DHS S&T Jake Hasselgren, John Howard, and Yevgeniy Sirotin -- The Maryland Test Facility
Series 70 Servo NXT - Modulating Controller Installation, Operation and Maintenance Manual
 THE HIGH PERFORMANCE COMPANY Series 70 Hold 1 sec. Hold 1 sec. FOR MORE INFORMATION ON THIS PRODUCT AND OTHER BRAY PRODUCTS PLEASE VISIT OUR WEBSITE www.bray.com Table of Contents 1. Definition of Terms.........................................2
THE HIGH PERFORMANCE COMPANY Series 70 Hold 1 sec. Hold 1 sec. FOR MORE INFORMATION ON THIS PRODUCT AND OTHER BRAY PRODUCTS PLEASE VISIT OUR WEBSITE www.bray.com Table of Contents 1. Definition of Terms.........................................2
On Emerging Technologies
 On Emerging Technologies 9.11. 2018. Prof. David Hyunchul Shim Director, Korea Civil RPAS Research Center KAIST, Republic of Korea hcshim@kaist.ac.kr 1 I. Overview Recent emerging technologies in civil
On Emerging Technologies 9.11. 2018. Prof. David Hyunchul Shim Director, Korea Civil RPAS Research Center KAIST, Republic of Korea hcshim@kaist.ac.kr 1 I. Overview Recent emerging technologies in civil
Tablet Oscilloscope Safety Information
 Tablet Oscilloscope Safety Information Shenzhen Micsig Instruments Co., Ltd. General Safety Summary To use the instrument safely, please follow safety precautions carefully and obey the well-known safety
Tablet Oscilloscope Safety Information Shenzhen Micsig Instruments Co., Ltd. General Safety Summary To use the instrument safely, please follow safety precautions carefully and obey the well-known safety
Production Noise Immunity
 Production Noise Immunity S21 Module of the KLIPPEL ANALYZER SYSTEM (QC 6.1, db-lab 210) Document Revision 2.0 FEATURES Auto-detection of ambient noise Extension of Standard SPL task Supervises Rub&Buzz,
Production Noise Immunity S21 Module of the KLIPPEL ANALYZER SYSTEM (QC 6.1, db-lab 210) Document Revision 2.0 FEATURES Auto-detection of ambient noise Extension of Standard SPL task Supervises Rub&Buzz,
METRI-PACK 2016 FEATURE PRODUCT JUL. Sealed Connector Systems OF THE MONTH. Weather-Pack And Deutsch Connector. tifcoonline.
 JUL METRI-PACK 2016 Weather-Pack And Deutsch Sealed Systems FEATURE PRODUCT OF THE MONTH www.tifco.com tifcoonline.com Phone: 800.868.4326 Fax: 800.535.4619 tifco@tifco.com Main Office: Houston, TX Branch
JUL METRI-PACK 2016 Weather-Pack And Deutsch Sealed Systems FEATURE PRODUCT OF THE MONTH www.tifco.com tifcoonline.com Phone: 800.868.4326 Fax: 800.535.4619 tifco@tifco.com Main Office: Houston, TX Branch
Adversarial Attacks on Face Detectors using Neural Net based Constrained Optimization
 Adversarial Attacks on Face Detectors using Neural Net based Constrained Optimization Joey Bose University of Toronto joey.bose@mail.utoronto.ca September 26, 2018 Joey Bose (UofT) GeekPwn Las Vegas September
Adversarial Attacks on Face Detectors using Neural Net based Constrained Optimization Joey Bose University of Toronto joey.bose@mail.utoronto.ca September 26, 2018 Joey Bose (UofT) GeekPwn Las Vegas September
Norris Sucker Rod Project. Andrew Dickey, Justin O Neal, and Daniel Whittlesey
 Norris Sucker Rod Project Andrew Dickey, Justin O Neal, and Daniel Whittlesey Table of Contents Introduction Mission Statement 2 Problem Statement 2 Statement of Work 2 Work Breakdown Structure 3 Task
Norris Sucker Rod Project Andrew Dickey, Justin O Neal, and Daniel Whittlesey Table of Contents Introduction Mission Statement 2 Problem Statement 2 Statement of Work 2 Work Breakdown Structure 3 Task
RDrive 85 servo motors. User manual
 INTRODUCTION Rozum Robotics has designed its RDrive (RD) servo motors to enable precision motion control in industrial and commercial applications. This manual is intended for technicians and engineers
INTRODUCTION Rozum Robotics has designed its RDrive (RD) servo motors to enable precision motion control in industrial and commercial applications. This manual is intended for technicians and engineers
Analog Voltage Detector 0-40kV Operating Instructions VDA040CTM
 Analog Voltage Detector 0-40kV Operating Instructions VDA040CTM CONTENTS Limitation of Warranty and Liability 2 Product Safety Information 3 Design and Function 4 Voltage Detection in the C Position 5-6
Analog Voltage Detector 0-40kV Operating Instructions VDA040CTM CONTENTS Limitation of Warranty and Liability 2 Product Safety Information 3 Design and Function 4 Voltage Detection in the C Position 5-6
Making Vehicles Smarter and Safer with Diode Laser-Based 3D Sensing
 Making Vehicles Smarter and Safer with Diode Laser-Based 3D Sensing www.lumentum.com White Paper There is tremendous development underway to improve vehicle safety through technologies like driver assistance
Making Vehicles Smarter and Safer with Diode Laser-Based 3D Sensing www.lumentum.com White Paper There is tremendous development underway to improve vehicle safety through technologies like driver assistance
KÜNSTLICHE INTELLIGENZ JOBKILLER VON MORGEN?
 KÜNSTLICHE INTELLIGENZ JOBKILLER VON MORGEN? Marc Stampfli https://www.linkedin.com/in/marcstampfli/ https://twitter.com/marc_stampfli E-Mail: mstampfli@nvidia.com INTELLIGENT ROBOTS AND SMART MACHINES
KÜNSTLICHE INTELLIGENZ JOBKILLER VON MORGEN? Marc Stampfli https://www.linkedin.com/in/marcstampfli/ https://twitter.com/marc_stampfli E-Mail: mstampfli@nvidia.com INTELLIGENT ROBOTS AND SMART MACHINES
Cedarville University Little Blue
 Cedarville University Little Blue IGVC Robot Design Report June 2004 Team Members: Silas Gibbs Kenny Keslar Tim Linden Jonathan Struebel Faculty Advisor: Dr. Clint Kohl Table of Contents 1. Introduction...
Cedarville University Little Blue IGVC Robot Design Report June 2004 Team Members: Silas Gibbs Kenny Keslar Tim Linden Jonathan Struebel Faculty Advisor: Dr. Clint Kohl Table of Contents 1. Introduction...
D4.1.2 Experiment progress report including intermediate results
 D4.1.2 Experiment progress report including intermediate results 2012-12-05 Wolfgang Halb (JRS), Stefan Prettenhofer (Infonova), Peter Höflehner (Schladming) This deliverable describes the interim progress
D4.1.2 Experiment progress report including intermediate results 2012-12-05 Wolfgang Halb (JRS), Stefan Prettenhofer (Infonova), Peter Höflehner (Schladming) This deliverable describes the interim progress
Integrating Spaceborne Sensing with Airborne Maritime Surveillance Patrols
 22nd International Congress on Modelling and Simulation, Hobart, Tasmania, Australia, 3 to 8 December 2017 mssanz.org.au/modsim2017 Integrating Spaceborne Sensing with Airborne Maritime Surveillance Patrols
22nd International Congress on Modelling and Simulation, Hobart, Tasmania, Australia, 3 to 8 December 2017 mssanz.org.au/modsim2017 Integrating Spaceborne Sensing with Airborne Maritime Surveillance Patrols
WIRELESS 868 MHz TEMPERATURE STATION Instruction Manual
 WIRELESS 868 MHz TEMPERATURE STATION Instruction Manual INTRODUCTION: Congratulations on purchasing this fancy 868MHz Temperature Station which displays the time, indoor temperature and indoor humidity,
WIRELESS 868 MHz TEMPERATURE STATION Instruction Manual INTRODUCTION: Congratulations on purchasing this fancy 868MHz Temperature Station which displays the time, indoor temperature and indoor humidity,
Engineering Project Proposals
 Engineering Project Proposals (Wireless sensor networks) Group members Hamdi Roumani Douglas Stamp Patrick Tayao Tyson J Hamilton (cs233017) (cs233199) (cs232039) (cs231144) Contact Information Email:
Engineering Project Proposals (Wireless sensor networks) Group members Hamdi Roumani Douglas Stamp Patrick Tayao Tyson J Hamilton (cs233017) (cs233199) (cs232039) (cs231144) Contact Information Email:
Project BONUS ESABALT
 Project BONUS ESABALT Economic and Non-Economic Feasibility Analysis dr Paweł Banaś Maritime University of Szczecin Content Assumptions 1. Analysis of navigational systems and devices 2. Expected ESABALT
Project BONUS ESABALT Economic and Non-Economic Feasibility Analysis dr Paweł Banaś Maritime University of Szczecin Content Assumptions 1. Analysis of navigational systems and devices 2. Expected ESABALT
swarm bee LE Development Kit User Guide
 Application Note Utilizing swarm bee radios for low power tag designsr Version Number: 1.0 Author: Jingjing Ding swarm bee LE Development Kit User Guide 1.0 NA-14-0267-0009-1.0 Document Information Document
Application Note Utilizing swarm bee radios for low power tag designsr Version Number: 1.0 Author: Jingjing Ding swarm bee LE Development Kit User Guide 1.0 NA-14-0267-0009-1.0 Document Information Document
ACCESS TO HIGH VOLTAGE APPARATUS
 CORPORATE PROCEDURE ACCESS TO HIGH VOLTAGE APPARATUS Approved By: Prepared By: Issue Date: 17/6/2011 Andrew Macrides Access to Apparatus Rules File No: Managing Director Committee QDOC2011/63 Status: Approved
CORPORATE PROCEDURE ACCESS TO HIGH VOLTAGE APPARATUS Approved By: Prepared By: Issue Date: 17/6/2011 Andrew Macrides Access to Apparatus Rules File No: Managing Director Committee QDOC2011/63 Status: Approved
SAFETY ENGINEERING SERIES, GS-0803
 TS-55 August 1981 General Schedule Position Classification Flysheet SAFETY ENGINEERING SERIES, GS-0803 Theodore Roosevelt Building 1900 E Street, NW Washington, DC 20415-8330 Classification Programs Division
TS-55 August 1981 General Schedule Position Classification Flysheet SAFETY ENGINEERING SERIES, GS-0803 Theodore Roosevelt Building 1900 E Street, NW Washington, DC 20415-8330 Classification Programs Division
An Evaluation of Automatic License Plate Recognition Vikas Kotagyale, Prof.S.D.Joshi
 An Evaluation of Automatic License Plate Recognition Vikas Kotagyale, Prof.S.D.Joshi Department of E&TC Engineering,PVPIT,Bavdhan,Pune ABSTRACT: In the last decades vehicle license plate recognition systems
An Evaluation of Automatic License Plate Recognition Vikas Kotagyale, Prof.S.D.Joshi Department of E&TC Engineering,PVPIT,Bavdhan,Pune ABSTRACT: In the last decades vehicle license plate recognition systems
BSc.(Hons) Public Administration and Management. Examinations for / Semester 2
 Public Administration and Management. Examinations for / Semester 2") BSc.(Hons) Public Administration and Management Cohort: BPAM/03/PT - Year 3 Examinations for 2005-2006 / Semester 2 MODULE: PROJECT MANAGEMENT MODULE CODE: BPAM2255 Duration: 2 Hours Reading Time: 10 Minutes
BSc.(Hons) Public Administration and Management Cohort: BPAM/03/PT - Year 3 Examinations for 2005-2006 / Semester 2 MODULE: PROJECT MANAGEMENT MODULE CODE: BPAM2255 Duration: 2 Hours Reading Time: 10 Minutes