Robotics for Space Exploration Today and Tomorrow. Chris Scolese NASA Associate Administrator March 17, 2010
|
|
|
- Horace Henry
- 5 years ago
- Views:
Transcription
1 Robotics for Space Exploration Today and Tomorrow Chris Scolese NASA Associate Administrator March 17, 2010
2 The Goal and The Problem Explore planetary surfaces with robotic vehicles Understand the environment Search for signatures of life Prepare for eventual human exploration Time delays range from minutes to hours Many unknowns Atmospheric conditions Surface conditions Winds Location of hazards
 Mars Science Laboratory (MSL)")
3 Past, Present and Future Rovers Mars Exploration Rover (MER) 2004 Sojourner 1997 (Photo: NASA/JPL/Thomas Dutch Slager) Mars Science Laboratory (MSL) 2011



4 Mars Science Laboratory (MSL) Predicted heat flux during EDL Mars Descent Imager (MARDI)
5 Mars Exploration Rovers (MER) Entry, Descent & Landing (EDL) Autonomy Entry Turn & HRS Freon Venting Cruise Stage Separation Entry Parachute Deployment Heatshield Separation Lander Separation Bridle Deployed Radar Ground Acquisition EDL Images Taken A series of open loop timed actions anchored in a few places by detection of key events; some options or branch points autonomously chosen by spacecraft by determination of velocity or orientation. Airbag Inflation Rocket Firing Bridle Cut Bounces Deflation Petals & SA Opened Roll Stop Airbags Retracted 5
6 Mars Exploration Rovers (MER) Entry, Descent & Landing (EDL) Autonomy Entry Turn & HRS Freon Venting Cruise Stage Separation Entry Parachute Deployment Heatshield Separation Lander Separation Initiated by a ground-specified time. Bridle Deployed Triggered by autonomous detection of deceleration peak (using accelerometer) Triggered by autonomous altitude determination by altimeter; options within rocket firing chosen by horizontal velocity (image based). Radar Ground Acquisition EDL Images Taken Airbag Inflation Rocket Firing Branches and decision points chosen autonomously by spacecraft based on gravity vector/orientation (accelerometer) Bridle Cut Bounces Deflation Petals & SA Opened Roll Stop Airbags Retracted 6
 Safe landing map on")
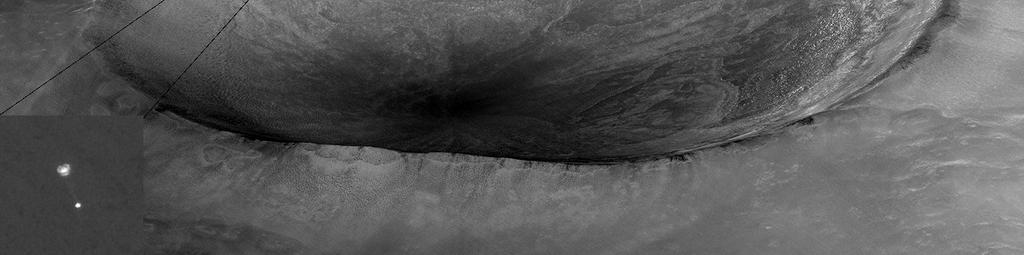
7 MER Entry, Descent, & Landing Descent image motion estimation subsystem (DIMES) Safe landing map on terrain


8 MER Entry, Descent, and Landing 1 Entire EDL system is autonomous. Descent image motion estimation subsystem (DIMES)


9 MER Entry, Descent, and Landing 2 Descent image motion estimation subsystem (DIMES)

10 Phoenix on the Chute




11 Mars Science Laboratory (MSL) Entry, Descent & Landing (EDL) Autonomy Entry Interface Peak Heating A series of open-loop timed actions tied at several points to a closed-loop guidance algorithm controlling vehicle position, velocity, and orientation. Peak Deceleration Hypersonic Aeromaneuvering Parachute Deploy Sky Crane Heatshield Separation Radar Data Collection Backshell Separation Throttle Down to 4 MLEs Rover Separation Mobility Deploy Powered Descent Touchdown Activate Flyaway Controller Flyaway Sky Crane Flyaway 11
12 Mars Science Laboratory (MSL) Entry, Descent & Landing (EDL) Autonomy Entry Interface Initiated by a ground-specified time. Closed-loop guidance through sensing of acceleration/angular rate (inertial measurement unit - IMU) Peak Heating Peak Deceleration Hypersonic Aeromaneuvering Triggered autonomously by inertial navigated velocity (IMU) Parachute Deploy Triggered and controlled autonomously by using surface relative position/velocity (altimeter/velocimeter, and IMU) Heatshield Separation Sky Crane Radar Data Collection Backshell Separation Throttle Down to 4 MLEs Rover Separation Mobility Deploy Powered Descent Touchdown Activate Flyaway Controller Flyaway Sky Crane Flyaway 12
13 MER Entry, Descent & Landing

14 MSL Entry, Descent & Landing

 Alpha Particle")
 Sample")
15 MSL Ground Robotic Science Dynamic Albedo of Neutrons (DAN) Alpha Particle X-ray Spectrometer (APXS) Sample Analysis at Mars (SAM)
")

16 Sample Acquisition, Processing, and Handling Organic Check Material Sample Observation Tray Extra Drill Bits Turret (Shown Below) 2.25 m Robot Arm MSL s sampling system can: Clean rock surfaces with a brush Place and hold the instruments on the arm (APXS and MAHLI) Acquire samples of rock or soil with a powdering drill or scoop Sieve the samples and deliver them to SAM, CheMin, or a tray for observation Exchange spare drill bits This document has been reviewed for export control and it does NOT contain controlled technical data.
 capability. Principal Investigator: Roger C.")
 ChemCAM Mast Unit (France) Mg Al Ba ChemCAM Body Unit")
17 Si ChemCam is a Laser Induced Breakdown Spectroscopy (LIBS) Instrument with Remote Macroscopic Imaging (RMI) capability. Principal Investigator: Roger C. Wiens Los Alamos National Laboratory Deputy Principal Investigator: Sylvestre Maurice Centre d Etude Spatiale des Rayonnements (CESR) ChemCAM Mast Unit (France) Mg Al Ba ChemCAM Body Unit (inside rover body) Los Alamos National Lab
 The GC columns can separate out individual gases from a complex")
 analysis.")
 can be detected by GC-MS.")

18 Sample Analysis at Mars (SAM) gas chromatograph can detect organic compounds Gas Chromatograph (GC) The GC columns can separate out individual gases from a complex mixture into molecular components for Quadrupole Mass Spectrometer and stand alone GC-mass spectrometry (GC-MS) analysis. A wide range of organic compounds including some of those relevant to life (amino acids, nucleobases, carboxylic acids, amines) can be detected by GC-MS. SAM Location of SAM on Mars Science Laboratory rover SAM engineers holding GC SAM configuration SAM is a suite of instruments on the Mars Science Laboratory rover. To learn more about SAM, visit GC integrated onto SAM flight hardware

 GESTALT")
19 MER Driving Autonomy Terrain assessment (predictive hazard detection) Path selection Visual pose update (visual odometry) GESTALT Navigation Visual Odometry




20 Autonomous Rover Surface Operations Actual map built from MER Spirit imagery Simulation of autonomous instrument placement Remote Science Operations Visual Odometry Key capabilities that provide autonomous operation of rovers millions of miles away Autonomous rover navigation Autonomous driving capability using stereo images for hazard detection and avoidance. The onboard software performs traversability analysis on 3-D range data to predict vehicle safety at all nearby locations; robust to partial sensor data and imprecise position estimation Visual odometry Capability to autonomously measure the progress of the rover traverse by imaging the surrounding area and comparing the successive images to provide an independent odometry from what is measured by the rotation of wheels to account for wheel slippage Instrument placement Capability to autonomously traverse ~10 meters towards a rock designated by scientists and orienting the rover such that an instrument can be placed on the rock with ~1 cm accuracy. The onboard software uses visual tracking of the designated rock and autonomously drives the rover towards the rock while avoiding hazards and computes a feasible rover orientation so that its manipulator can place the instrument on the rock. Remote science operations Provides downlink data visualization, science activity planning, merging of science plans from multiple scientists and develops plans for autonomous science operations by the rover and its science 20 instruments
 Power (e.g. solar cell orientation to sun, power states) Thermal (e.g. body orientation to sun, state of heaters, power states) Communications (e.")

21 General Spacecraft Autonomy and Fault Protection Earth Sun The spacecraft independently monitors its state and acts to maintain critical resources and capabilities: Attitude (e.g. knowledge with respect to sun or stars, control based on available actuators) Power (e.g. solar cell orientation to sun, power states) Thermal (e.g. body orientation to sun, state of heaters, power states) Communications (e.g. antenna orientation to Earth, configuration of radios) Onboard systems generally execute sequences of timed activities to control the spacecraft. Activities may include critical events like propulsive maneuvers with state monitors and decisionmaking. For example: Inertial measurement of accumulated Delta-V Monitoring for failed hardware and trigger of autonomous recovery. 21

22 Autonomous Underwater Vehicle Environmentally Non-Disturbing Under-ice Robotic Antarctic Explorer (ENDURANCE)

23 Possible future submersible seeking liquid water on Europa or Enceladus 4/10/07 Elachi ASU 23
Jet Propulsion Laboratory
 Aerospace Jet Propulsion Laboratory Product Femap NASA engineers used Femap to ensure Curiosity could endure the Seven Minutes of Terror Business challenges Designing and building a new roving Mars Science
Aerospace Jet Propulsion Laboratory Product Femap NASA engineers used Femap to ensure Curiosity could endure the Seven Minutes of Terror Business challenges Designing and building a new roving Mars Science
Engineering Sciences and Technology. Landing on Mars
 PART 1: "The spacecraft" Open this file and save it in your directory, answer to questions with the instructions below. First, watch this video that shows the operation's landing of Mars Science Laboratory.
PART 1: "The spacecraft" Open this file and save it in your directory, answer to questions with the instructions below. First, watch this video that shows the operation's landing of Mars Science Laboratory.
C. R. Weisbin, R. Easter, G. Rodriguez January 2001
 on Solar System Bodies --Abstract of a Projected Comparative Performance Evaluation Study-- C. R. Weisbin, R. Easter, G. Rodriguez January 2001 Long Range Vision of Surface Scenarios Technology Now 5 Yrs
on Solar System Bodies --Abstract of a Projected Comparative Performance Evaluation Study-- C. R. Weisbin, R. Easter, G. Rodriguez January 2001 Long Range Vision of Surface Scenarios Technology Now 5 Yrs
Office of Chief Technologist - Space Technology Program Dr. Prasun Desai Office of the Chief Technologist May 1, 2012
 Office of Chief Technologist - Space Technology Program Dr. Prasun Desai Office of the Chief Technologist May 1, 2012 O f f i c e o f t h e C h i e f T e c h n o l o g i s t Office of the Chief Technologist
Office of Chief Technologist - Space Technology Program Dr. Prasun Desai Office of the Chief Technologist May 1, 2012 O f f i c e o f t h e C h i e f T e c h n o l o g i s t Office of the Chief Technologist
Seven Minutes of Terror, Eight Years of Ingenuity
 Seven Minutes of Terror, Eight Years of Ingenuity Sometimeswhenwelookatit,itlookscrazy, remarkedadamsteltzner,anengineerwho worksforthenationalaeronauticsandspaceadministration knownmorecommonlytothe worldasnasa.
Seven Minutes of Terror, Eight Years of Ingenuity Sometimeswhenwelookatit,itlookscrazy, remarkedadamsteltzner,anengineerwho worksforthenationalaeronauticsandspaceadministration knownmorecommonlytothe worldasnasa.
ATPE Simulator: Simulation Tool for Onboard GNC Development and Validation
 ATPE Simulator: Simulation Tool for Onboard GNC Development and Validation Uwe Brüge Uwe Soppa Presented by Eugénio Ferreira GNC & On-board S/W Engineering 3rd ESA Workshop on Astrodynamics Tools and Techniques
ATPE Simulator: Simulation Tool for Onboard GNC Development and Validation Uwe Brüge Uwe Soppa Presented by Eugénio Ferreira GNC & On-board S/W Engineering 3rd ESA Workshop on Astrodynamics Tools and Techniques
Using RSVP for Analyzing State and Previous Activities for the Mars Exploration Rovers
 Using RSVP for Analyzing State and Previous Activities for the Mars Exploration Rovers Brian K. Cooper 1, Frank Hartman 1, Scott Maxwell 1, John Wright 1, Jeng Yen 1 1 Jet Propulsion Laboratory, Pasadena,
Using RSVP for Analyzing State and Previous Activities for the Mars Exploration Rovers Brian K. Cooper 1, Frank Hartman 1, Scott Maxwell 1, John Wright 1, Jeng Yen 1 1 Jet Propulsion Laboratory, Pasadena,
CubeSat Proximity Operations Demonstration (CPOD) Vehicle Avionics and Design
 Vehicle Avionics and Design") CubeSat Proximity Operations Demonstration (CPOD) Vehicle Avionics and Design August CubeSat Workshop 2015 Austin Williams VP, Space Vehicles CPOD: Big Capability in a Small Package Communications ADCS
CubeSat Proximity Operations Demonstration (CPOD) Vehicle Avionics and Design August CubeSat Workshop 2015 Austin Williams VP, Space Vehicles CPOD: Big Capability in a Small Package Communications ADCS
Lecture 13: Requirements Analysis
 Lecture 13: Requirements Analysis 2008 Steve Easterbrook. This presentation is available free for non-commercial use with attribution under a creative commons license. 1 Mars Polar Lander Launched 3 Jan
Lecture 13: Requirements Analysis 2008 Steve Easterbrook. This presentation is available free for non-commercial use with attribution under a creative commons license. 1 Mars Polar Lander Launched 3 Jan
The CNES French Space Agency Planetary Program Low cost perspectives
 The CNES French Space Agency Planetary Program Low cost perspectives Pierre W. Bousquet Senior expert in Planetology, Exploration and Microgravity Outline of the talk ChemCam Credit: NASA/JPL-Caltech Instrumentation
The CNES French Space Agency Planetary Program Low cost perspectives Pierre W. Bousquet Senior expert in Planetology, Exploration and Microgravity Outline of the talk ChemCam Credit: NASA/JPL-Caltech Instrumentation
Pterodactyl: Integrated Control Design for Precision Targeting of Deployable Entry Vehicles
 Pterodactyl: Integrated Control Design for Precision Targeting of Deployable Entry Vehicles Dr. Sarah D Souza, Principal Investigator NASA Ames Research Center 15 th International Planetary Probe Workshop
Pterodactyl: Integrated Control Design for Precision Targeting of Deployable Entry Vehicles Dr. Sarah D Souza, Principal Investigator NASA Ames Research Center 15 th International Planetary Probe Workshop
Planetary CubeSats, nanosatellites and sub-spacecraft: are we all talking about the same thing?
 Planetary CubeSats, nanosatellites and sub-spacecraft: are we all talking about the same thing? Frank Crary University of Colorado Laboratory for Atmospheric and Space Physics 6 th icubesat, Cambridge,
Planetary CubeSats, nanosatellites and sub-spacecraft: are we all talking about the same thing? Frank Crary University of Colorado Laboratory for Atmospheric and Space Physics 6 th icubesat, Cambridge,
NASA s Space Launch System: Powering the Journey to Mars. FISO Telecon Aug 3, 2016
 NASA s Space Launch System: Powering the Journey to Mars FISO Telecon Aug 3, 2016 0 Why the Nation Needs to Go Beyond Low Earth Orbit To answer fundamental questions about the universe Are we alone? Where
NASA s Space Launch System: Powering the Journey to Mars FISO Telecon Aug 3, 2016 0 Why the Nation Needs to Go Beyond Low Earth Orbit To answer fundamental questions about the universe Are we alone? Where
Revised and extended. Accompanies this course pages heavier Perception treated more thoroughly. 1 - Introduction
 Topics to be Covered Coordinate frames and representations. Use of homogeneous transformations in robotics. Specification of position and orientation Manipulator forward and inverse kinematics Mobile Robots:
Topics to be Covered Coordinate frames and representations. Use of homogeneous transformations in robotics. Specification of position and orientation Manipulator forward and inverse kinematics Mobile Robots:
Technology Capabilities and Gaps Roadmap
 Technology Capabilities and Gaps Roadmap John Dankanich Presented at Small Body Technology Forum January 26, 2011 Introduction This is to serve as an evolving technology development roadmap to allow maximum
Technology Capabilities and Gaps Roadmap John Dankanich Presented at Small Body Technology Forum January 26, 2011 Introduction This is to serve as an evolving technology development roadmap to allow maximum
On January 14, 2004, the President announced a new space exploration vision for NASA
 Exploration Conference January 31, 2005 President s Vision for U.S. Space Exploration On January 14, 2004, the President announced a new space exploration vision for NASA Implement a sustained and affordable
Exploration Conference January 31, 2005 President s Vision for U.S. Space Exploration On January 14, 2004, the President announced a new space exploration vision for NASA Implement a sustained and affordable
Directions: Read the following passage and answer the questions that follow. Seven Minutes of Terror, Eight Years of Ingenuity
 Ms. Eugene English 3 Homework assignments for the week of October 5 through October 9 Monday HW#6 Directions: Read the following passage and answer the questions that follow. Seven Minutes of Terror, Eight
Ms. Eugene English 3 Homework assignments for the week of October 5 through October 9 Monday HW#6 Directions: Read the following passage and answer the questions that follow. Seven Minutes of Terror, Eight
Credits. National Aeronautics and Space Administration. United Space Alliance, LLC. John Frassanito and Associates Strategic Visualization
 A New Age in Space The Vision for Space Exploration Credits National Aeronautics and Space Administration United Space Alliance, LLC John Frassanito and Associates Strategic Visualization Coalition for
A New Age in Space The Vision for Space Exploration Credits National Aeronautics and Space Administration United Space Alliance, LLC John Frassanito and Associates Strategic Visualization Coalition for
Science on the Fly. Preview. Autonomous Science for Rover Traverse. David Wettergreen The Robotics Institute Carnegie Mellon University
 Science on the Fly Autonomous Science for Rover Traverse David Wettergreen The Robotics Institute University Preview Motivation and Objectives Technology Research Field Validation 1 Science Autonomy Science
Science on the Fly Autonomous Science for Rover Traverse David Wettergreen The Robotics Institute University Preview Motivation and Objectives Technology Research Field Validation 1 Science Autonomy Science
Venus Aircraft. design evolution Geoffrey A. Landis. NASA John Glenn Research Center. Geoffrey A. Landis.
 Venus Aircraft design evolution 2000-2008 Geoffrey A. Landis NASA John Glenn Research Center Geoffrey A. Landis Venus Aircraft Atmospheric exploration trade-study Balloon Simple technology Demonstrated
Venus Aircraft design evolution 2000-2008 Geoffrey A. Landis NASA John Glenn Research Center Geoffrey A. Landis Venus Aircraft Atmospheric exploration trade-study Balloon Simple technology Demonstrated
ExoMars and Beyond. Thales Alenia Space. Feb 28th, 9:00 AM. Follow this and additional works at: https://commons.erau.edu/space-congress-proceedings
 The Space Congress Proceedings 2018 (45th) The Next Great Steps Feb 28th, 9:00 AM ExoMars and Beyond Thales Alenia Space Follow this and additional works at: https://commons.erau.edu/space-congress-proceedings
The Space Congress Proceedings 2018 (45th) The Next Great Steps Feb 28th, 9:00 AM ExoMars and Beyond Thales Alenia Space Follow this and additional works at: https://commons.erau.edu/space-congress-proceedings
EDL Modeling Challenges for Past & Present Planetary Missions
 EDL Modeling Challenges for Past & Present Planetary Missions Michael J. Wright Project Manager 18 th International Planetary Probe Workshop Modeling is Critical Path for EDL Flight mechanics predictions
EDL Modeling Challenges for Past & Present Planetary Missions Michael J. Wright Project Manager 18 th International Planetary Probe Workshop Modeling is Critical Path for EDL Flight mechanics predictions
Canadian Space Robotic Technologies for Lunar Exploration
 Canadian Space Robotic Technologies for Lunar Exploration Nadeem Ghafoor Christian Sallaberger MDA International Lunar Conference Toronto, 19th-23rd September, 2005 Overview Space Robotics in Canada -
Canadian Space Robotic Technologies for Lunar Exploration Nadeem Ghafoor Christian Sallaberger MDA International Lunar Conference Toronto, 19th-23rd September, 2005 Overview Space Robotics in Canada -
The Evolution of Nano-Satellite Proximity Operations In-Space Inspection Workshop 2017
 The Evolution of Nano-Satellite Proximity Operations 02-01-2017 In-Space Inspection Workshop 2017 Tyvak Introduction We develop miniaturized custom spacecraft, launch solutions, and aerospace technologies
The Evolution of Nano-Satellite Proximity Operations 02-01-2017 In-Space Inspection Workshop 2017 Tyvak Introduction We develop miniaturized custom spacecraft, launch solutions, and aerospace technologies
Satellite Testing. Prepared by. A.Kaviyarasu Assistant Professor Department of Aerospace Engineering Madras Institute Of Technology Chromepet, Chennai
 Satellite Testing Prepared by A.Kaviyarasu Assistant Professor Department of Aerospace Engineering Madras Institute Of Technology Chromepet, Chennai @copyright Solar Panel Deployment Test Spacecraft operating
Satellite Testing Prepared by A.Kaviyarasu Assistant Professor Department of Aerospace Engineering Madras Institute Of Technology Chromepet, Chennai @copyright Solar Panel Deployment Test Spacecraft operating
Heading back to Mars with a thermal control system developed using NX
 Aerospace JPL Heading back to Mars with a thermal control system developed using NX Product NX Business challenges Tighter schedules Large daily temperature swings during the life of the mission Bigger
Aerospace JPL Heading back to Mars with a thermal control system developed using NX Product NX Business challenges Tighter schedules Large daily temperature swings during the life of the mission Bigger
Key Areas for Collaboration
 Planetary Robotics & Autonomy - current and future collaborations with China Dr. Yang Gao Head of AI & Autonomy Group Lecturer in Spacecraft Autonomy Surrey Space Centre University of Surrey, United Kingdom
Planetary Robotics & Autonomy - current and future collaborations with China Dr. Yang Gao Head of AI & Autonomy Group Lecturer in Spacecraft Autonomy Surrey Space Centre University of Surrey, United Kingdom
Red Dragon. Feasibility of a Dragon-derived Mars lander for scientific and human-precursor missions. May 7, 2013
 Red Dragon Feasibility of a Dragon-derived Mars lander for scientific and human-precursor missions May 7, 2013 John S. Karcz (john.s.karcz@nasa.gov) NASA Ames Research Center 1 Overview We are studying
Red Dragon Feasibility of a Dragon-derived Mars lander for scientific and human-precursor missions May 7, 2013 John S. Karcz (john.s.karcz@nasa.gov) NASA Ames Research Center 1 Overview We are studying
The Third Ilan Ramon Annual International Space Conference
 Israel Ministry of Science Culture & Sport The Fisher Brothers Inst. For Air & Space Strategic Studies The Third Ilan Ramon Annual International Space Conference January 30-31, 2008 Publication No. 39
Israel Ministry of Science Culture & Sport The Fisher Brothers Inst. For Air & Space Strategic Studies The Third Ilan Ramon Annual International Space Conference January 30-31, 2008 Publication No. 39
Nanosat Deorbit and Recovery System to Enable New Missions
 SSC11-X-3 Nanosat Deorbit and Recovery System to Enable New Missions Jason Andrews, Krissa Watry, Kevin Brown Andrews Space, Inc. 3415 S. 116th Street, Ste 123, Tukwila, WA 98168, (206) 342-9934 jandrews@andrews-space.com,
SSC11-X-3 Nanosat Deorbit and Recovery System to Enable New Missions Jason Andrews, Krissa Watry, Kevin Brown Andrews Space, Inc. 3415 S. 116th Street, Ste 123, Tukwila, WA 98168, (206) 342-9934 jandrews@andrews-space.com,
K9 Operation in May 00 Dual-Rover Field Experiment
 Proceeding of the 6 th International Symposium on Artificial Intelligence and Robotics & Automation in Space: i-sairas 2001, Canadian Space Agency, St-Hubert, Quebec, Canada, June 18-22, 2001. K9 Operation
Proceeding of the 6 th International Symposium on Artificial Intelligence and Robotics & Automation in Space: i-sairas 2001, Canadian Space Agency, St-Hubert, Quebec, Canada, June 18-22, 2001. K9 Operation
NanoSwarm: CubeSats Enabling a Discovery Class Mission Jordi Puig-Suari Tyvak Nano-Satellite Systems
 NanoSwarm: CubeSats Enabling a Discovery Class Mission Jordi Puig-Suari Tyvak Nano-Satellite Systems TERRAN ORBITAL NanoSwarm Mission Objectives Detailed investigation of Particles and Magnetic Fields
NanoSwarm: CubeSats Enabling a Discovery Class Mission Jordi Puig-Suari Tyvak Nano-Satellite Systems TERRAN ORBITAL NanoSwarm Mission Objectives Detailed investigation of Particles and Magnetic Fields
CubeSat Proximity Operations Demonstration (CPOD) Mission Update Cal Poly CubeSat Workshop San Luis Obispo, CA
 Mission Update Cal Poly CubeSat Workshop San Luis Obispo, CA") CubeSat Proximity Operations Demonstration (CPOD) Mission Update Cal Poly CubeSat Workshop San Luis Obispo, CA 04-22-2015 Austin Williams VP, Space Vehicles ConOps Overview - Designed to Maximize Mission
CubeSat Proximity Operations Demonstration (CPOD) Mission Update Cal Poly CubeSat Workshop San Luis Obispo, CA 04-22-2015 Austin Williams VP, Space Vehicles ConOps Overview - Designed to Maximize Mission
JPL. Heading back to Mars with thermal control system developed using NX. Aerospace. Product NX
 Aerospace JPL Heading back to Mars with thermal control system developed using NX Product NX Business challenges Tighter schedules Large daily temperature swings during the life of the mission Bigger rover
Aerospace JPL Heading back to Mars with thermal control system developed using NX Product NX Business challenges Tighter schedules Large daily temperature swings during the life of the mission Bigger rover
Voyage to Mars Space Simulation
 Voyage to Mars Space Simulation Your class is divided into two crews Spacecraft Mars Control Perform experiments and send results to Mars Control Crew Record results, research analyze, and draw conclusions
Voyage to Mars Space Simulation Your class is divided into two crews Spacecraft Mars Control Perform experiments and send results to Mars Control Crew Record results, research analyze, and draw conclusions
FLCS V2.1. AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station
 AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station The platform provides a high performance basis for electromechanical system control. Originally designed for autonomous aerial vehicle
AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station The platform provides a high performance basis for electromechanical system control. Originally designed for autonomous aerial vehicle
Robotics in Space. Ian Taylor MP. Co-Chair, UK Parliamentary Space Committee VIIIth European Interparliamentary Space Conference
 Robotics in Space Ian Taylor MP Co-Chair, UK Parliamentary Space Committee www.iantaylormp.com VIIIth European Interparliamentary Space Conference Brussels 12/14 June 2006 1 Men (and Women) in Space Very
Robotics in Space Ian Taylor MP Co-Chair, UK Parliamentary Space Committee www.iantaylormp.com VIIIth European Interparliamentary Space Conference Brussels 12/14 June 2006 1 Men (and Women) in Space Very
CATEGORY 7 - NAVIGATION AND AVIONICS A. SYSTEMS, EQUIPMENT AND COMPONENTS
 Commerce Control List Supplement No. 1 to Part 774 Category 7 page 1 CATEGORY 7 - NAVIGATION AND AVIONICS A. SYSTEMS, EQUIPMENT AND COMPONENTS N.B.1: For automatic pilots for underwater vehicles, see Category
Commerce Control List Supplement No. 1 to Part 774 Category 7 page 1 CATEGORY 7 - NAVIGATION AND AVIONICS A. SYSTEMS, EQUIPMENT AND COMPONENTS N.B.1: For automatic pilots for underwater vehicles, see Category
Space Robotic Capabilities David Kortenkamp (NASA Johnson Space Center)
") Robotic Capabilities David Kortenkamp (NASA Johnson ) Liam Pedersen (NASA Ames) Trey Smith (Carnegie Mellon University) Illah Nourbakhsh (Carnegie Mellon University) David Wettergreen (Carnegie Mellon
Robotic Capabilities David Kortenkamp (NASA Johnson ) Liam Pedersen (NASA Ames) Trey Smith (Carnegie Mellon University) Illah Nourbakhsh (Carnegie Mellon University) David Wettergreen (Carnegie Mellon
Titan Bumblebee : A 1kg Lander-Launched UAV Concept
 Titan Bumblebee : A 1kg Lander-Launched UAV Concept Ralph D. Lorenz Space Department, Johns Hopkins University Applied Physics Laboratory, 11100 Johns Hopkins Road, Laurel, MD 20723, USA (Ralph.lorenz@jhuapl.edu)
Titan Bumblebee : A 1kg Lander-Launched UAV Concept Ralph D. Lorenz Space Department, Johns Hopkins University Applied Physics Laboratory, 11100 Johns Hopkins Road, Laurel, MD 20723, USA (Ralph.lorenz@jhuapl.edu)
Post-Flight Analysis of the Radio Doppler Shifts of the ExoMars Schiaparelli Lander
 Post-Flight Analysis of the Radio Doppler Shifts of the ExoMars Schiaparelli Lander Ö. Karatekin 1, B. Van Hove 1, N. Gerbal 1, S. Asmar 2, D. Firre 3, M. Denis 3, A. Aboudan 4, F. Ferri 4 and AMELIA team
Post-Flight Analysis of the Radio Doppler Shifts of the ExoMars Schiaparelli Lander Ö. Karatekin 1, B. Van Hove 1, N. Gerbal 1, S. Asmar 2, D. Firre 3, M. Denis 3, A. Aboudan 4, F. Ferri 4 and AMELIA team
The TEXAS Satellite Design Laboratory: An Overview of Our Current Projects FASTRAC, BEVO-2, & ARMADILLO
 The TEXAS Satellite Design Laboratory: An Overview of Our Current Projects FASTRAC, BEVO-2, & ARMADILLO Dr. E. Glenn Lightsey (Principal Investigator), Sebastián Muñoz, Katharine Brumbaugh UT Austin s
The TEXAS Satellite Design Laboratory: An Overview of Our Current Projects FASTRAC, BEVO-2, & ARMADILLO Dr. E. Glenn Lightsey (Principal Investigator), Sebastián Muñoz, Katharine Brumbaugh UT Austin s
Robot: Robonaut 2 The first humanoid robot to go to outer space
 ProfileArticle Robot: Robonaut 2 The first humanoid robot to go to outer space For the complete profile with media resources, visit: http://education.nationalgeographic.org/news/robot-robonaut-2/ Program
ProfileArticle Robot: Robonaut 2 The first humanoid robot to go to outer space For the complete profile with media resources, visit: http://education.nationalgeographic.org/news/robot-robonaut-2/ Program
Canadian Activities in Intelligent Robotic Systems - An Overview
 In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Canadian Activities in Intelligent Robotic
In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Canadian Activities in Intelligent Robotic
the ExoMars Entry, Descent & Landing Science
 AMELIA (Atmospheric Mars Entry and Landing Investigations & Analysis) the ExoMars Entry, Descent & Landing Science F. Ferri 1, O. Karatekin 2, A. Aboudan 1, B. Van Hove 2 G. Colombatti 1,, C. Bettanini
AMELIA (Atmospheric Mars Entry and Landing Investigations & Analysis) the ExoMars Entry, Descent & Landing Science F. Ferri 1, O. Karatekin 2, A. Aboudan 1, B. Van Hove 2 G. Colombatti 1,, C. Bettanini
Reaching for the Stars
 Satellite Research Centre Reaching for the Stars Kay-Soon Low Centre Director School of Electrical & Electronic Engineering Nanyang Technological University 1 Satellite Programs @SaRC 2013 2014 2015 2016
Satellite Research Centre Reaching for the Stars Kay-Soon Low Centre Director School of Electrical & Electronic Engineering Nanyang Technological University 1 Satellite Programs @SaRC 2013 2014 2015 2016
Asteroid Redirect Mission and Human Exploration. William H. Gerstenmaier NASA Associate Administrator for Human Exploration and Operations
 Asteroid Redirect Mission and Human Exploration William H. Gerstenmaier NASA Associate Administrator for Human Exploration and Operations Leveraging Capabilities for an Asteroid Mission NASA is aligning
Asteroid Redirect Mission and Human Exploration William H. Gerstenmaier NASA Associate Administrator for Human Exploration and Operations Leveraging Capabilities for an Asteroid Mission NASA is aligning
Space Settlement Laboratory
 Space Settlement Laboratory Resolving the Issues of Space Settlement Rapidly Kent Nebergall Knebergall (at) Gmail. Com MacroInvent.com Copyright 2016, Kent Nebergall The Grand Challenges Launch/LEO Deep
Space Settlement Laboratory Resolving the Issues of Space Settlement Rapidly Kent Nebergall Knebergall (at) Gmail. Com MacroInvent.com Copyright 2016, Kent Nebergall The Grand Challenges Launch/LEO Deep
Design of a Remote-Cockpit for small Aerospace Vehicles
 Design of a Remote-Cockpit for small Aerospace Vehicles Muhammad Faisal, Atheel Redah, Sergio Montenegro Universität Würzburg Informatik VIII, Josef-Martin Weg 52, 97074 Würzburg, Germany Phone: +49 30
Design of a Remote-Cockpit for small Aerospace Vehicles Muhammad Faisal, Atheel Redah, Sergio Montenegro Universität Würzburg Informatik VIII, Josef-Martin Weg 52, 97074 Würzburg, Germany Phone: +49 30
ROBOTICS ENG YOUSEF A. SHATNAWI INTRODUCTION
 ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
Autonomous and Autonomic Systems: With Applications to NASA Intelligent Spacecraft Operations and Exploration Systems
 Walt Truszkowski, Harold L. Hallock, Christopher Rouff, Jay Karlin, James Rash, Mike Hinchey, and Roy Sterritt Autonomous and Autonomic Systems: With Applications to NASA Intelligent Spacecraft Operations
Walt Truszkowski, Harold L. Hallock, Christopher Rouff, Jay Karlin, James Rash, Mike Hinchey, and Roy Sterritt Autonomous and Autonomic Systems: With Applications to NASA Intelligent Spacecraft Operations
Meeting the Challenge of Low Cost Lunar Exploration
 Space Missions Meeting the Challenge of Low Cost Lunar Exploration Nadeem Ghafoor MDA / SSL LEAG 2013, 14-16 th October, APL, Laurel MD Changing Times New space exploration era Positives Exciting new exploration
Space Missions Meeting the Challenge of Low Cost Lunar Exploration Nadeem Ghafoor MDA / SSL LEAG 2013, 14-16 th October, APL, Laurel MD Changing Times New space exploration era Positives Exciting new exploration
Shooting for the Moon
 18 Astronautical Engineering Shooting for the Moon Aprille Ericsson Courtesy of Aprille Joy Ericsson In the next decade, if all goes as planned, a spacecraft developed by NASA may bring dust from Mars
18 Astronautical Engineering Shooting for the Moon Aprille Ericsson Courtesy of Aprille Joy Ericsson In the next decade, if all goes as planned, a spacecraft developed by NASA may bring dust from Mars
AN EXPERIMENTAL STUDY OF LUNAR RECONNAISSANCE BASE FACILITATING EXPLORATION AND SETTLEMENT
 PRESENTATION ON AN EXPERIMENTAL STUDY OF LUNAR RECONNAISSANCE BASE WITH THE ROBOTIC EMPLACEMENTS DONE BY JAYASHREE SRIDHAR GRADE-12 [High School] CHENNAI INDIA FACILITATING EXPLORATION AND SETTLEMENT October
PRESENTATION ON AN EXPERIMENTAL STUDY OF LUNAR RECONNAISSANCE BASE WITH THE ROBOTIC EMPLACEMENTS DONE BY JAYASHREE SRIDHAR GRADE-12 [High School] CHENNAI INDIA FACILITATING EXPLORATION AND SETTLEMENT October
Autonomous Control for Unmanned
 Autonomous Control for Unmanned Surface Vehicles December 8, 2016 Carl Conti, CAPT, USN (Ret) Spatial Integrated Systems, Inc. SIS Corporate Profile Small Business founded in 1997, focusing on Research,
Autonomous Control for Unmanned Surface Vehicles December 8, 2016 Carl Conti, CAPT, USN (Ret) Spatial Integrated Systems, Inc. SIS Corporate Profile Small Business founded in 1997, focusing on Research,
AVSS Project. ENAE483 Fall 2012
 AVSS Project ENAE483 Fall 2012 Team D9: Jason Burr Vera Klimchenko Grant McLaughlin Johnathan Pino Link Budget Analysis Maximum Earth-Moon Transmission Distance R M D R M R e Moon 406,700 km Earth Ku Band
AVSS Project ENAE483 Fall 2012 Team D9: Jason Burr Vera Klimchenko Grant McLaughlin Johnathan Pino Link Budget Analysis Maximum Earth-Moon Transmission Distance R M D R M R e Moon 406,700 km Earth Ku Band
Istanbul Technical University Faculty of Aeronautics and Astronautics Space Systems Design and Test Laboratory
 Title: Space Advertiser (S-VERTISE) Primary POC: Aeronautics and Astronautics Engineer Hakan AYKENT Organization: Istanbul Technical University POC email: aykent@itu.edu.tr Need Worldwide companies need
Title: Space Advertiser (S-VERTISE) Primary POC: Aeronautics and Astronautics Engineer Hakan AYKENT Organization: Istanbul Technical University POC email: aykent@itu.edu.tr Need Worldwide companies need
Engineering Adventures
 Engineering Adventures Engineering Journal Liftoff Your Name: Group Name: ii Prep Adventure 1 Message from the Duo X reply forward archive delete from: to: subject: engineeringadventures@mos.org You Engineering
Engineering Adventures Engineering Journal Liftoff Your Name: Group Name: ii Prep Adventure 1 Message from the Duo X reply forward archive delete from: to: subject: engineeringadventures@mos.org You Engineering
The Lunar Split Mission: Concepts for Robotically Constructed Lunar Bases
 2005 International Lunar Conference Renaissance Toronto Hotel Downtown, Toronto, Ontario, Canada The Lunar Split Mission: Concepts for Robotically Constructed Lunar Bases George Davis, Derek Surka Emergent
2005 International Lunar Conference Renaissance Toronto Hotel Downtown, Toronto, Ontario, Canada The Lunar Split Mission: Concepts for Robotically Constructed Lunar Bases George Davis, Derek Surka Emergent
Panel Session IV - Future Space Exploration
 The Space Congress Proceedings 2003 (40th) Linking the Past to the Future - A Celebration of Space May 1st, 8:30 AM - 11:00 AM Panel Session IV - Future Space Exploration Canaveral Council of Technical
The Space Congress Proceedings 2003 (40th) Linking the Past to the Future - A Celebration of Space May 1st, 8:30 AM - 11:00 AM Panel Session IV - Future Space Exploration Canaveral Council of Technical
Advanced Design for Robot in Mars Exploration
 Proceedings of the 2010 International Conference on Industrial Engineering and Operations Management Dhaka, Bangladesh, January 9 10, 2010 Advanced Design for Robot in Mars Exploration P. Pradeep, M. Prabhakaran,
Proceedings of the 2010 International Conference on Industrial Engineering and Operations Management Dhaka, Bangladesh, January 9 10, 2010 Advanced Design for Robot in Mars Exploration P. Pradeep, M. Prabhakaran,
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics studies robots For history and definitions see the 2013 slides http://www.ladispe.polito.it/corsi/meccatronica/01peeqw/2014-15/slides/robotics_2013_01_a_brief_history.pdf
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics studies robots For history and definitions see the 2013 slides http://www.ladispe.polito.it/corsi/meccatronica/01peeqw/2014-15/slides/robotics_2013_01_a_brief_history.pdf
The Global Exploration Roadmap International Space Exploration Coordination Group (ISECG)
") The Global Exploration Roadmap International Space Exploration Coordination Group (ISECG) Kathy Laurini NASA/Senior Advisor, Exploration & Space Ops Co-Chair/ISECG Exp. Roadmap Working Group FISO Telecon,
The Global Exploration Roadmap International Space Exploration Coordination Group (ISECG) Kathy Laurini NASA/Senior Advisor, Exploration & Space Ops Co-Chair/ISECG Exp. Roadmap Working Group FISO Telecon,
COS Lecture 1 Autonomous Robot Navigation
 COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
The International Lunar Network (ILN) and the US Anchor Nodes mission
 and the US Anchor Nodes mission") The International Lunar Network (ILN) and the US Anchor Nodes mission Update to the LEAG/ILWEG/SRR, 10/30/08 Barbara Cohen, SDT Co-chair NASA Marshall Space Flight Center Barbara.A.Cohen@nasa.gov The ILN
The International Lunar Network (ILN) and the US Anchor Nodes mission Update to the LEAG/ILWEG/SRR, 10/30/08 Barbara Cohen, SDT Co-chair NASA Marshall Space Flight Center Barbara.A.Cohen@nasa.gov The ILN
Daring Mighty Things. AFCEA Los Angeles. Larry James (Lt. Gen. USAF, Ret.), Deputy Director. a presentation to. January 14, 2015
, Deputy Director. a presentation to. January 14, 2015") Jet Propulsion Laboratory California Institute of Technology Daring Mighty Things a presentation to AFCEA Los Angeles January 14, 2015 Larry James (Lt. Gen. USAF, Ret.), Deputy Director Jet Propulsion
Jet Propulsion Laboratory California Institute of Technology Daring Mighty Things a presentation to AFCEA Los Angeles January 14, 2015 Larry James (Lt. Gen. USAF, Ret.), Deputy Director Jet Propulsion
CubeSat Integration into the Space Situational Awareness Architecture
 CubeSat Integration into the Space Situational Awareness Architecture Keith Morris, Chris Rice, Mark Wolfson Lockheed Martin Space Systems Company 12257 S. Wadsworth Blvd. Mailstop S6040 Littleton, CO
CubeSat Integration into the Space Situational Awareness Architecture Keith Morris, Chris Rice, Mark Wolfson Lockheed Martin Space Systems Company 12257 S. Wadsworth Blvd. Mailstop S6040 Littleton, CO
Principles of Autonomy and Decision Making. Brian C. Williams / December 10 th, 2003
 Principles of Autonomy and Decision Making Brian C. Williams 16.410/16.413 December 10 th, 2003 1 Outline Objectives Agents and Their Building Blocks Principles for Building Agents: Modeling Formalisms
Principles of Autonomy and Decision Making Brian C. Williams 16.410/16.413 December 10 th, 2003 1 Outline Objectives Agents and Their Building Blocks Principles for Building Agents: Modeling Formalisms
2009 ESMD Space Grant Faculty Project
 2009 ESMD Space Grant Faculty Project 1 Objectives Train and develop the highly skilled scientific, engineering and technical workforce of the future needed to implement space exploration missions: In
2009 ESMD Space Grant Faculty Project 1 Objectives Train and develop the highly skilled scientific, engineering and technical workforce of the future needed to implement space exploration missions: In
RAppelling Cave Exploration Rover (RACER)
") University of Colorado Department of Aerospace Engineering Sciences ASEN 4018 Conceptual Design Document (CDD) RAppelling Cave Exploration Rover (RACER) Approvals Name Affiliation Approved Date Customer
University of Colorado Department of Aerospace Engineering Sciences ASEN 4018 Conceptual Design Document (CDD) RAppelling Cave Exploration Rover (RACER) Approvals Name Affiliation Approved Date Customer
Guidance, Navigation, and Control Technology Assessment for Future Planetary Science Missions
 Guidance, Navigation, and Control Technology Assessment for Future Planetary Science Missions April 2, 2013 National Aeronautics and Space Administration Jet Propulsion Laboratory California Institute
Guidance, Navigation, and Control Technology Assessment for Future Planetary Science Missions April 2, 2013 National Aeronautics and Space Administration Jet Propulsion Laboratory California Institute
The PROBA Missions Design Capabilities for Autonomous Guidance, Navigation and Control. Jean de Lafontaine President
 The PROBA Missions Design Capabilities for Autonomous Guidance, Navigation and Control Jean de Lafontaine President Overview of NGC NGC International Inc (holding company) NGC Aerospace Ltd Sherbrooke,
The PROBA Missions Design Capabilities for Autonomous Guidance, Navigation and Control Jean de Lafontaine President Overview of NGC NGC International Inc (holding company) NGC Aerospace Ltd Sherbrooke,
Space Situational Awareness 2015: GPS Applications in Space
 Space Situational Awareness 2015: GPS Applications in Space James J. Miller, Deputy Director Policy & Strategic Communications Division May 13, 2015 GPS Extends the Reach of NASA Networks to Enable New
Space Situational Awareness 2015: GPS Applications in Space James J. Miller, Deputy Director Policy & Strategic Communications Division May 13, 2015 GPS Extends the Reach of NASA Networks to Enable New
The Australian Curriculum Science
 The Australian Curriculum Science Science Table of Contents ACARA The Australian Curriculum dated Monday, 17 October 2011 2 Biological Foundation Year Year 1 Year 2 Year 3 Year 4 Year 5 Year 6 Living things
The Australian Curriculum Science Science Table of Contents ACARA The Australian Curriculum dated Monday, 17 October 2011 2 Biological Foundation Year Year 1 Year 2 Year 3 Year 4 Year 5 Year 6 Living things
SPACE. (Some space topics are also listed under Mechatronic topics)
") SPACE (Some space topics are also listed under Mechatronic topics) Dr Xiaofeng Wu Rm N314, Bldg J11; ph. 9036 7053, Xiaofeng.wu@sydney.edu.au Part I SPACE ENGINEERING 1. Vision based satellite formation
SPACE (Some space topics are also listed under Mechatronic topics) Dr Xiaofeng Wu Rm N314, Bldg J11; ph. 9036 7053, Xiaofeng.wu@sydney.edu.au Part I SPACE ENGINEERING 1. Vision based satellite formation
Skyworker: Robotics for Space Assembly, Inspection and Maintenance
 Skyworker: Robotics for Space Assembly, Inspection and Maintenance Sarjoun Skaff, Carnegie Mellon University Peter J. Staritz, Carnegie Mellon University William Whittaker, Carnegie Mellon University Abstract
Skyworker: Robotics for Space Assembly, Inspection and Maintenance Sarjoun Skaff, Carnegie Mellon University Peter J. Staritz, Carnegie Mellon University William Whittaker, Carnegie Mellon University Abstract
Eighth Grade Summer Reading Assignment
 Eighth Grade Summer Reading Assignment I. Read the two assigned articles and answer the accompanying questions in complete sentences. II. Read a grade appropriate fictional novel of your choice. Please
Eighth Grade Summer Reading Assignment I. Read the two assigned articles and answer the accompanying questions in complete sentences. II. Read a grade appropriate fictional novel of your choice. Please
Ozobot Bit. Computer Science Engineering Program
 3 rd Grade Ozobot Bit Computer Science Engineering Program Post Visit Activity Resources 2018 Winter/Spring 2018 Dear Third Grade Visiting Classroom Teacher, It is hoped that you and your students enjoyed
3 rd Grade Ozobot Bit Computer Science Engineering Program Post Visit Activity Resources 2018 Winter/Spring 2018 Dear Third Grade Visiting Classroom Teacher, It is hoped that you and your students enjoyed
CUBESAT an OVERVIEW AEOLUS AERO TECH, Pvt. Ltd.
 CUBESAT an OVERVIEW AEOLUS AERO TECH, Pvt. Ltd. Aeolus Aero Tech Pvt. Ltd. (Aeolus) based in Bengaluru, Karnataka, India, provides a wide range of Products, Services and Technology Solutions in Alternative
CUBESAT an OVERVIEW AEOLUS AERO TECH, Pvt. Ltd. Aeolus Aero Tech Pvt. Ltd. (Aeolus) based in Bengaluru, Karnataka, India, provides a wide range of Products, Services and Technology Solutions in Alternative
Deep Space cubesats a nanosats at JPL. Tony Freeman Jet Propulsion Laboratory, California Institute of Technology
 Deep Space cubesats a nanosats at JPL Tony Freeman Jet Propulsion Laboratory, California Institute of Technology Cubesats and Nanosats at JPL Overview JPL is known for its flagship missions to explore
Deep Space cubesats a nanosats at JPL Tony Freeman Jet Propulsion Laboratory, California Institute of Technology Cubesats and Nanosats at JPL Overview JPL is known for its flagship missions to explore
NOIME: Nitric Oxide and Inertial Measurement Experiment
 NOIME: Nitric Oxide and Inertial Measurement Experiment Our goal is to measure concentrations of nitric oxide in the upper atmosphere and record inertial data of the rocket launch and flight. From left
NOIME: Nitric Oxide and Inertial Measurement Experiment Our goal is to measure concentrations of nitric oxide in the upper atmosphere and record inertial data of the rocket launch and flight. From left
In the summer of 2002, Sub-Orbital Technologies developed a low-altitude
 1.0 Introduction In the summer of 2002, Sub-Orbital Technologies developed a low-altitude CanSat satellite at The University of Texas at Austin. At the end of the project, team members came to the conclusion
1.0 Introduction In the summer of 2002, Sub-Orbital Technologies developed a low-altitude CanSat satellite at The University of Texas at Austin. At the end of the project, team members came to the conclusion
GNSS Reflectometry and Passive Radar at DLR
 ACES and FUTURE GNSS-Based EARTH OBSERVATION and NAVIGATION 26./27. May 2008, TU München Dr. Thomas Börner, Microwaves and Radar Institute, DLR Overview GNSS Reflectometry a joined proposal of DLR and
ACES and FUTURE GNSS-Based EARTH OBSERVATION and NAVIGATION 26./27. May 2008, TU München Dr. Thomas Börner, Microwaves and Radar Institute, DLR Overview GNSS Reflectometry a joined proposal of DLR and
Reducing the Challenges Posed by Titan Missions
 Reducing the Challenges Posed by Titan Missions Presentation to the Satellites Panel of the Planetary Science Decadal Survey Kim Reh, John Elliott, Jeffrey Hall Deputy Manager, Solar System Mission Formulation
Reducing the Challenges Posed by Titan Missions Presentation to the Satellites Panel of the Planetary Science Decadal Survey Kim Reh, John Elliott, Jeffrey Hall Deputy Manager, Solar System Mission Formulation
From Single to Formation Flying CubeSats: An Update of the Delfi Programme
 From Single to Formation Flying CubeSats: An Update of the Delfi Programme Jian Guo, Jasper Bouwmeester & Eberhard Gill 1 Outline Introduction Delfi-C 3 Mission Delfi-n3Xt Mission Lessons Learned DelFFi
From Single to Formation Flying CubeSats: An Update of the Delfi Programme Jian Guo, Jasper Bouwmeester & Eberhard Gill 1 Outline Introduction Delfi-C 3 Mission Delfi-n3Xt Mission Lessons Learned DelFFi
U.S. Space Exploration in the Next 20 NASA Space Sciences Policy
 U.S. Space Exploration in the Next 20 ScienceYears: to Inspire, Science to Serve NASA Space Sciences Policy National Aeronautics and Space Administration Waleed Abdalati NASA Chief Scientist Waleed Abdalati
U.S. Space Exploration in the Next 20 ScienceYears: to Inspire, Science to Serve NASA Space Sciences Policy National Aeronautics and Space Administration Waleed Abdalati NASA Chief Scientist Waleed Abdalati
Call for Ideas. for the Next Exploration Science and Technology Mission of the European Space Exploration Programme - Aurora
 Page 1 of 11 Call for Ideas for the Next Exploration Science and Technology Mission of the European Space Exploration Programme - Aurora 1. Introduction At the Berlin Ministerial Council in 2005 ESA Member
Page 1 of 11 Call for Ideas for the Next Exploration Science and Technology Mission of the European Space Exploration Programme - Aurora 1. Introduction At the Berlin Ministerial Council in 2005 ESA Member
ASPIRE. Reconstructed DGB Performance During the ASPIRE SR01& SR02 Supersonic Flight Tests
 Jet Propulsion Laboratory California Institute of Technology Reconstructed DGB Performance During the & SR2 Supersonic Flight Tests 15 th International Planetary Probes Workshop Clara O Farrell, Bryan
Jet Propulsion Laboratory California Institute of Technology Reconstructed DGB Performance During the & SR2 Supersonic Flight Tests 15 th International Planetary Probes Workshop Clara O Farrell, Bryan
NASA s X2000 Program - an Institutional Approach to Enabling Smaller Spacecraft
 NASA s X2000 Program - an Institutional Approach to Enabling Smaller Spacecraft Dr. Leslie J. Deutsch and Chris Salvo Advanced Flight Systems Program Jet Propulsion Laboratory California Institute of Technology
NASA s X2000 Program - an Institutional Approach to Enabling Smaller Spacecraft Dr. Leslie J. Deutsch and Chris Salvo Advanced Flight Systems Program Jet Propulsion Laboratory California Institute of Technology
Jet Propulsion Laboratory, California Institute of Technology
 MarCO: Early Flight Status Andrew Klesh, Joel Krajewski MarCO Flight Team: Brian Clement, Cody Colley, John Essmiller, Daniel Forgette, Anne Marinan, Tomas Martin-Mur, David Sternberg, Joel Steinkraus,
MarCO: Early Flight Status Andrew Klesh, Joel Krajewski MarCO Flight Team: Brian Clement, Cody Colley, John Essmiller, Daniel Forgette, Anne Marinan, Tomas Martin-Mur, David Sternberg, Joel Steinkraus,
Enabling Technologies for robotic and human Exploration
 Enabling Technologies for robotic and human Exploration Norbert Frischauf,, Bruno Gardini, Alain Pradier,, Dietrich Vennemann Aurora Programme Office IAA/ESA Workshop ESA/ESTEC, 22-23/09/2003 22-23/09/2003-1-
Enabling Technologies for robotic and human Exploration Norbert Frischauf,, Bruno Gardini, Alain Pradier,, Dietrich Vennemann Aurora Programme Office IAA/ESA Workshop ESA/ESTEC, 22-23/09/2003 22-23/09/2003-1-
Technology Capabilities and Gaps Roadmap
 Technology Capabilities and Gaps Roadmap John Dankanich Presented to the Small Body Assessment Group (SBAG) August 25, 2011 Introduction This is to serve as an evolving technology development roadmap to
Technology Capabilities and Gaps Roadmap John Dankanich Presented to the Small Body Assessment Group (SBAG) August 25, 2011 Introduction This is to serve as an evolving technology development roadmap to
STARBASE Minnesota Duluth Grade 5 Program Description & Standards Alignment
 STARBASE Minnesota Duluth Grade 5 Program Description & Standards Alignment Day 1: Analyze and engineer a rocket for space exploration Students are introduced to engineering and the engineering design
STARBASE Minnesota Duluth Grade 5 Program Description & Standards Alignment Day 1: Analyze and engineer a rocket for space exploration Students are introduced to engineering and the engineering design
Deep Space Communication The further you go, the harder it gets. D. Kanipe, Sept. 2013
 Deep Space Communication The further you go, the harder it gets D. Kanipe, Sept. 2013 Deep Space Communication Introduction Obstacles: enormous distances, S/C mass and power limits International Telecommunications
Deep Space Communication The further you go, the harder it gets D. Kanipe, Sept. 2013 Deep Space Communication Introduction Obstacles: enormous distances, S/C mass and power limits International Telecommunications
NASA Mars Exploration Program Update to the Planetary Science Subcommittee
 NASA Mars Exploration Program Update to the Planetary Science Subcommittee Jim Watzin Director MEP March 9, 2016 The state-of-the-mep today Our operational assets remain healthy and productive: MAVEN has
NASA Mars Exploration Program Update to the Planetary Science Subcommittee Jim Watzin Director MEP March 9, 2016 The state-of-the-mep today Our operational assets remain healthy and productive: MAVEN has
ASCENTIS: Planetary Ascent Vehicle FES Tool
 ASCENTIS: Planetary Ascent Vehicle FES Tool Eugénio Ferreira, Thierry Jean-Marius Mission analysis & GNC teams 3rd International Workshop on Astrodynamics Tools and Techniques ESTEC, 4 October 2006 Page
ASCENTIS: Planetary Ascent Vehicle FES Tool Eugénio Ferreira, Thierry Jean-Marius Mission analysis & GNC teams 3rd International Workshop on Astrodynamics Tools and Techniques ESTEC, 4 October 2006 Page
Autonomous Planning and Execution for a Future Titan Aerobot
 Autonomous Planning and Execution for a Future Titan Aerobot Daniel Gaines, Tara Estlin, Steve Schaffer, Caroline Chouinard and Alberto Elfes Jet Propulsion Laboratory California Institute of Technology
Autonomous Planning and Execution for a Future Titan Aerobot Daniel Gaines, Tara Estlin, Steve Schaffer, Caroline Chouinard and Alberto Elfes Jet Propulsion Laboratory California Institute of Technology
GPS data correction using encoders and INS sensors
 GPS data correction using encoders and INS sensors Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, Avenue de la Renaissance 30, 1000 Brussels, Belgium sidahmed.berrabah@rma.ac.be
GPS data correction using encoders and INS sensors Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, Avenue de la Renaissance 30, 1000 Brussels, Belgium sidahmed.berrabah@rma.ac.be
Platform Independent Launch Vehicle Avionics
 Platform Independent Launch Vehicle Avionics Small Satellite Conference Logan, Utah August 5 th, 2014 Company Introduction Founded in 2011 The Co-Founders blend Academia and Commercial Experience ~20 Employees
Platform Independent Launch Vehicle Avionics Small Satellite Conference Logan, Utah August 5 th, 2014 Company Introduction Founded in 2011 The Co-Founders blend Academia and Commercial Experience ~20 Employees
Family Space Day Overview - Robotics
 Family Space Day Overview - Robotics Family Space Day is a three hour event. The activities are set up so that children and their parents can select the order in which they undertake activities. Parents
Family Space Day Overview - Robotics Family Space Day is a three hour event. The activities are set up so that children and their parents can select the order in which they undertake activities. Parents