AUTOMATION & ROBOTICS LABORATORY. Faculty of Electronics and Telecommunications University of Engineering and Technology Vietnam National University
|
|
|
- Emily Rich
- 5 years ago
- Views:
Transcription

1 AUTOMATION & ROBOTICS LABORATORY Faculty of Electronics and Telecommunications University of Engineering and Technology Vietnam National University


2 Industrial Robot for Training ED7220 (Korea) SCORBOT ER Vplus (Isarel) 2



3 Industrial Robot Projects Product Classification Tele-Presence 3
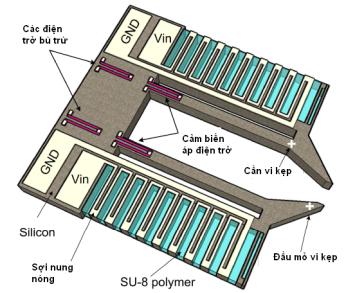
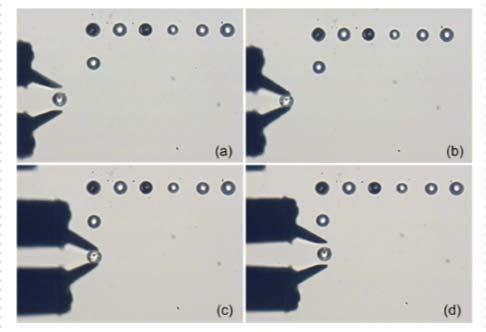

4 Teleoperations Supervise and control Micro-gripper MEMS + Haptic + Microscope + Computer Vision 4

5 Intelligent Robot 5
6 Autonomous Mobile Robotics Robot Navigation Localization & Mapping Localization "Position" Global Map Cognition Path-planing Environment Model Local Map Path sensor Perception Real World Environment Motion Control Control Obstacle avoidance 6
7 Approaches of research Autonomous Mobile Robotics Sensor Fusion remote control of robot the network through Networked multi-robot Applications 7







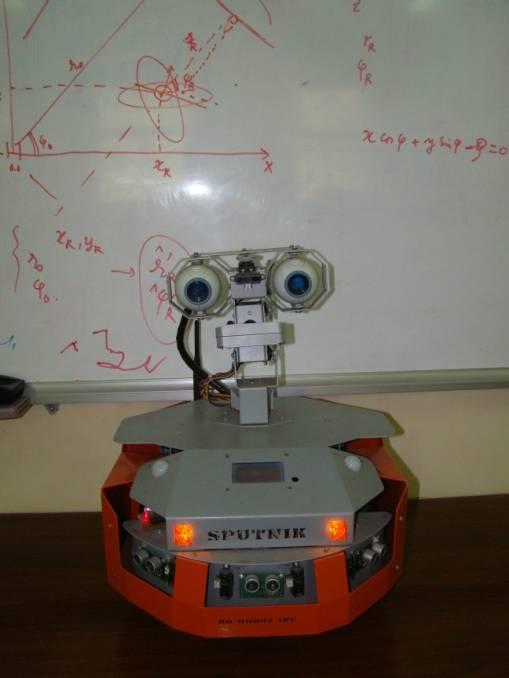
8 Sensor Fusion Autonomous Mobile Robotics Multi-sensor Robot Omni Camera HOLUX GPS UB- 93 CCD Camera SRF-05 LMS-221 CMPS03 (0.1 ) Joystick Controller 8

9 Sensor Fusion Autonomous Mobile Robotics Data fusion of one sensor with an Extended Kalman Filter EKF 9



 to increase")


10 Sensor Fusion Autonomous Mobile Robotics Fusion 4 sensors (optical encoder + compass + laser range finder + omni-directional camera) to increase the accuracy of position estimation. 4 3 Odometry Compass LRF Omni Fusion TRUE Y(m) X(m) 10



11 Sensor Fusion Autonomous Mobile Robotics 3D laser image using for obstacle avoidance 11

12 Sensor Fusion Autonomous Mobile Robotics Mapping and path planing using sensor fusion s data with A* algorithm or Voronoi graph. 12
13 Networked robot Autonomous Mobile Robotics 13

14 Networked robot Autonomous Mobile Robotics Localization of NRSs using Past-Observation based EKF (PO-KF) Experimental configuration with local Internet service providers. Experimental configuration with VPN connections to servers located at the United State. 14
15 Networked robot Autonomous Mobile Robotics The theory, observation, POEKFbased estimate, and true trajectories of the robot in motion plane. RMSE between the theory, observation, PO-EKF-based estimate and the true trajectories in X direction. 15
 Trajectory of the robot in the motion plane; (b) Variation of the direction of the robot.")
16 Networked robot Stabilization Control using Lyapunov Stability Theory and Predictive Filter Control of NRS with the use of the predictive filter: (a) Trajectory of the robot in the motion plane; (b) Variation of the direction of the robot. 16

 Time delay; (b):")
17 Networked robot Autonomous Mobile Robotics Navigation using behavior-based and multi-protocol models Communications in an NRS system using multi-protocol model. Network state during the experiment: (a) Time delay; (b): Delay jitter. 17




18 Networked robot Multi-robot Searching System in a disaster area using Particle Swarm Optimization Algorithm PSO. Ant Colony Bird Flocking Fish School The system has the duty to find a location which is highly affected by radioactivity. Maintaining the connection between the robots Graph of pbest tracking gbest Nuclear contamination distribution in the operation area of robot 18
19 Applications Servicing robots Search and rescue in disaster Remote monitoring in forest fire Positioning in nuclear contamination Anti-terrorism, military, security,.. 19
20 student s projects Intelligent Serviced Robots 20



21 Embedded programming for Hexapod 12-DOF 21


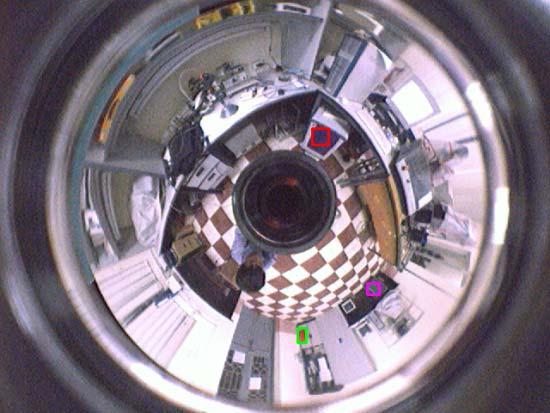
22 Color Tracking using Omni-directional Camera 22
23 Smart Cleaning Robot Technical specifications: Not fall in the stair. Moving along the setting paths. Go out the shadow before switch off. Using computer-vision for self-identification the electric socket in order to charge. 23



24 Balancing Robot First prize in the student scientific researching contest System model Simulation Implementation 24


25 Brainwaves for Control of Robot Electroencephalograph EEG 25


26 Moving Object Tracking by Computer Vision Eye Tracking NTT project Moving Motor Tracking 26
27 Publications Journal Papers: Manh Duong Phung, Thi Thanh Van Nguyen, Thuan Hoang Tran, Quang Vinh Tran, Localization of Internet-based Mobile Robot, Journal of Science, Natural science and Technology, Vietnam National University,Vol.29, Thuan Hoang Tran, Manh Duong Phung, Thi Thanh Van Nguyen, Quang Vinh Tran, Stablization Control of the Differential Mobile Robot Using Lyapunov Function and Extended Kalman Filter, Journal of Science and Technology, Vietnam Academy of Science and Technology, pp , Vol. 50 (4), July-October, Nguyen Thi Thanh Van, Phung Manh Duong, Pham Dinh Tuan, and Tran Quang Vinh, Development of a Fuzzy-based Patrol Robot Using in Building Automation System, Journal of Computer Science and Cybernetics, pp.83-92, vol.27 no.1, June, Tran Quang Vinh, Pham Manh Thang, Phung Manh Duong, Controlling Communication Network in the Building Automation System, Journal of Science, Natural science and Technology,Vietnam National University, pp , Vol.26 no.2, September, Phung Manh Duong, Tran Hieu and Tran Quang Vinh, Supervision and control of a mobile robot through WLAN and the Internet, Journal of Science, Natural science and Technology, Vietnam National University, Vol.21 no.2, April
28 Publications International Conference Papers: T. T. Hoang, D. T. Hiep, P. M. Duong, N. T. T. Van, D. A. Viet and T. Q. Vinh (2013), Proposal of Algorithms for Navigation and Obstacles Avoidance of autonomous Mobile Robot, 8th IEEE Conference on Industrial Electronics & Applications (ICIEA2013), Melbourne, Australia, pp T. T. Hoang, P. M. Duong, N. T. T. Van, D. A. Viet and T. Q. Vinh, Development of an EKFbased Localization Algorithm Using Compass Sensor and LRF, The 12th IEEE International Conference on Control, Automation, Robotics and Vision (ICARCV), pp , Guangzhou, China,December 2012.(ISI Conference) Manh Duong Phung, Thuan Hoang Tran, Thanh Van Thi Nguyen and Quang Vinh Tran, Control of Internet-based Robot Systems Using Multi Transport Protocols,The First IEEE International Conference on Control, Automation and Information Sciences (ICCAIS),pp ,Ho Chi Minh City, Vietnam, November T. T. Hoang, P. M. Duong, N. T. T. Van, D. A. Viet and T. Q. Vinh, Multi-Sensor Perceptual System for Mobile Robot and Sensor Fusion-based Localization, The First IEEE International Conference on Control, Automation and Information Sciences (ICCAIS), pp , Ho Chi Minh City, Vietnam, November
29 Publications Thi Thanh Van Nguyen, Manh Duong Phung, Thuan Hoang Tran, Quang Vinh Tran, Mobile Robot Localization Using Fuzzy Neural Network Based Extended Kalman Filter, 2012 IEEE International Conference on Control System, Computing and Engineering (ICCSCE), pp., Penang, Malaysia, November Tran Hiep Dinh, Manh Duong Phung, Thuan Hoang Tran, Quang Vinh Tran, Localization of a Unicycle-like Mobile Robot Using LRF and Omni-directional Camera, 2012 IEEE International Conference on Control System, Computing and Engineering (ICCSCE), pp., Penang, Malaysia, November T. H. Hoang, P. M. Duong, N. V. Tinh and T. Q. Vinh, A Path Following Algorithm for Wheeled Mobile Robot Using Extended Kalman Filter, The 3rd IEICE International Conference on Integrated Circuits and Devices in Vietnam (ICDV), pp ,danang, Vietnam, August P. M. Duong, T. T. Hoang, N. T. T. Van, D. A. Viet and T. Q. Vinh, A Novel Platform for Internet-based Mobile Robot Systems, The 7th IEEE Conference on Industrial Electronics and Applications (ICIEA), pp , Singapore,July 2012.(ISI Conference) T. T. Hoang, P. M. Duong, N. T. T. Van, D. A. Viet and T. Q. Vinh, Development of a Multi- Sensor Perceptual System for Mobile Robot and EKF-based Localization, The IEEE 2012 International Conferenceon Systems and Informatics (ICSAI),pp , Yantai, China, May
30 Manh Duong Phung, Thanh Van Thi Nguyen, and Tran Quang Vinh, Control of an Internetbased Robot System Using Fuzzy Logic, The 2011 IEICE International Conference on Integrated Circuits and Devices in Vietnam (ICDV), pp , Hanoi, Vietnam, August T. T. Hoang, D. A. Viet, T. Q. Vinh (2011), A 3D image capture system using a laser range finder, IEICE Proceeding of the 2th international conference on Integrated Circuit Design ICDV, Ha Noi,Vietnam, pp Manh Duong Phung, Thanh Van Thi Nguyen, Cong Hoang Quach, Quang Vinh Tran, Development of a Tele-guidance System with Fuzzy-based Secondary Controller, The 11th IEEE International Conference on Control, Automation, Robotics and Vision (ICARCV), pp , Singapore, December 2010.(ISI Conference) Manh Duong Phung, Quang Vinh Tran, Kok Kiong Tan, Transport Protocols for Internetbased Real-time Systems: A Comparative Analysis, The Third International Conference on Communication and Electronics (ICCE),Nha Trang, Vietnam, August 2010.(ISI Conference) Manh Duong Phung, Quang Vinh Tran, K. Hara, H. Inagaki and M. Abe, Easy-Setup Eye Movement Recording System for Human-Computer Interaction, The 2008 IEEE International Conference on Research, Innovation and Vision for the Future (RIVF), pp , Hochiminh City, Vietnam,July 2008.(ISI Conference) Phung Manh Duong, K. Hara, H. Inagaki and M. Abe, Fast Pupil Center Detection Using A Double Circle Fitting Algorithm, IEICE General Conference, Japan, Phung Manh Duong, K. Hara, H. Inagaki and M. Abe, Fast and Robust Pupil Center Detection Algorithm for Eye Movement Tracking, IEICE Technical Report, vol.107 no.491, PRMU , pp ,tsukuba, Japan, February
31 Thank you for attention 31


32 Intellgent Robot Trilobots DrRobot Aibo Robot 32



33 Intelligent Robot Projects Color Tracking Cleaning Robot Internet Robot 33
* Intelli Robotic Wheel Chair for Specialty Operations & Physically Challenged
 ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
NCCT IEEE PROJECTS ADVANCED ROBOTICS SOLUTIONS. Latest Projects, in various Domains. Promise for the Best Projects
 NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
SCIENTIFIC CURRICULUM VITAE
 SCIENTIFIC CURRICULUM VITAE I. Personal information. Full name: Thanh Phong Dao. Birthday: 9/08/98 3. Sex: Male 4. Profession: Full-time researcher 5. Academic degree: Doctoral degree Year of issue: 05
SCIENTIFIC CURRICULUM VITAE I. Personal information. Full name: Thanh Phong Dao. Birthday: 9/08/98 3. Sex: Male 4. Profession: Full-time researcher 5. Academic degree: Doctoral degree Year of issue: 05
CURRICULUM VITAE Huy, Vu Quang March 05, 2013
 CURRICULUM VITAE Huy, Vu Quang March 05, 2013 PERSONAL INFORMATION Name in Full: Sex: Vu Quang Huy Male Date of Birth: 1978/10/31 Married : Single Mail Address: 235/11 Nam Ki Khoi Nghia Street, District
CURRICULUM VITAE Huy, Vu Quang March 05, 2013 PERSONAL INFORMATION Name in Full: Sex: Vu Quang Huy Male Date of Birth: 1978/10/31 Married : Single Mail Address: 235/11 Nam Ki Khoi Nghia Street, District
Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free Human Following Navigation in Outdoor Environment
 Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
NAVIGATION OF MOBILE ROBOT USING THE PSO PARTICLE SWARM OPTIMIZATION
 Journal of Academic and Applied Studies (JAAS) Vol. 2(1) Jan 2012, pp. 32-38 Available online @ www.academians.org ISSN1925-931X NAVIGATION OF MOBILE ROBOT USING THE PSO PARTICLE SWARM OPTIMIZATION Sedigheh
Journal of Academic and Applied Studies (JAAS) Vol. 2(1) Jan 2012, pp. 32-38 Available online @ www.academians.org ISSN1925-931X NAVIGATION OF MOBILE ROBOT USING THE PSO PARTICLE SWARM OPTIMIZATION Sedigheh
DEVELOPMENT OF FPGA BASED CONTROL ARCHITECTURE FOR PMSM DRIVES
 UNIVERSITY OF TECHNOLOGY, SYDNEY Faculty of Engineering and Information Technology DEVELOPMENT OF FPGA BASED CONTROL ARCHITECTURE FOR PMSM DRIVES by Quang Nguyen Khanh A Thesis Submitted in Partial Fulfillment
UNIVERSITY OF TECHNOLOGY, SYDNEY Faculty of Engineering and Information Technology DEVELOPMENT OF FPGA BASED CONTROL ARCHITECTURE FOR PMSM DRIVES by Quang Nguyen Khanh A Thesis Submitted in Partial Fulfillment
Subsumption Architecture in Swarm Robotics. Cuong Nguyen Viet 16/11/2015
 Subsumption Architecture in Swarm Robotics Cuong Nguyen Viet 16/11/2015 1 Table of content Motivation Subsumption Architecture Background Architecture decomposition Implementation Swarm robotics Swarm
Subsumption Architecture in Swarm Robotics Cuong Nguyen Viet 16/11/2015 1 Table of content Motivation Subsumption Architecture Background Architecture decomposition Implementation Swarm robotics Swarm
This list supersedes the one published in the November 2002 issue of CR.
 PERIODICALS RECEIVED This is the current list of periodicals received for review in Reviews. International standard serial numbers (ISSNs) are provided to facilitate obtaining copies of articles or subscriptions.
PERIODICALS RECEIVED This is the current list of periodicals received for review in Reviews. International standard serial numbers (ISSNs) are provided to facilitate obtaining copies of articles or subscriptions.
Electronics and TELECOMMUNICATIONS- AUTOMATION & CONTROL SYSTEMS GENERAL
 Electronics and TELECOMMUNICATIONS- AUTOMATION & CONTROL SYSTEMS Journals List " " GENERAL Title ISSN Impact Factor ISSU IEEE T PATTERN ANAL 0162-8828 3.579 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS
Electronics and TELECOMMUNICATIONS- AUTOMATION & CONTROL SYSTEMS Journals List " " GENERAL Title ISSN Impact Factor ISSU IEEE T PATTERN ANAL 0162-8828 3.579 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS
Wednesday, October 29, :00-04:00pm EB: 3546D. TELEOPERATION OF MOBILE MANIPULATORS By Yunyi Jia Advisor: Prof.
 Wednesday, October 29, 2014 02:00-04:00pm EB: 3546D TELEOPERATION OF MOBILE MANIPULATORS By Yunyi Jia Advisor: Prof. Ning Xi ABSTRACT Mobile manipulators provide larger working spaces and more flexibility
Wednesday, October 29, 2014 02:00-04:00pm EB: 3546D TELEOPERATION OF MOBILE MANIPULATORS By Yunyi Jia Advisor: Prof. Ning Xi ABSTRACT Mobile manipulators provide larger working spaces and more flexibility
Available online at ScienceDirect. Procedia Computer Science 76 (2015 )
") Available online at www.sciencedirect.com ScienceDirect Procedia Computer Science 76 (2015 ) 474 479 2015 IEEE International Symposium on Robotics and Intelligent Sensors (IRIS 2015) Sensor Based Mobile
Available online at www.sciencedirect.com ScienceDirect Procedia Computer Science 76 (2015 ) 474 479 2015 IEEE International Symposium on Robotics and Intelligent Sensors (IRIS 2015) Sensor Based Mobile
Intelligent Vehicle Localization Using GPS, Compass, and Machine Vision
 The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15, 2009 St. Louis, USA Intelligent Vehicle Localization Using GPS, Compass, and Machine Vision Somphop Limsoonthrakul,
The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15, 2009 St. Louis, USA Intelligent Vehicle Localization Using GPS, Compass, and Machine Vision Somphop Limsoonthrakul,
This document is downloaded from DR-NTU, Nanyang Technological University Library, Singapore.
 This document is downloaded from DR-NTU, Nanyang Technological University Library, Singapore. Title Internet in Vietnam : workshop Author(s) Citation Internet in Vietnam : workshop. (1999). In International
This document is downloaded from DR-NTU, Nanyang Technological University Library, Singapore. Title Internet in Vietnam : workshop Author(s) Citation Internet in Vietnam : workshop. (1999). In International
Key-Words: - Fuzzy Behaviour Controls, Multiple Target Tracking, Obstacle Avoidance, Ultrasonic Range Finders
 Fuzzy Behaviour Based Navigation of a Mobile Robot for Tracking Multiple Targets in an Unstructured Environment NASIR RAHMAN, ALI RAZA JAFRI, M. USMAN KEERIO School of Mechatronics Engineering Beijing
Fuzzy Behaviour Based Navigation of a Mobile Robot for Tracking Multiple Targets in an Unstructured Environment NASIR RAHMAN, ALI RAZA JAFRI, M. USMAN KEERIO School of Mechatronics Engineering Beijing
Robots Leaving the Production Halls Opportunities and Challenges
 Shaping the future Robots Leaving the Production Halls Opportunities and Challenges Prof. Dr. Roland Siegwart www.asl.ethz.ch www.wysszurich.ch APAC INNOVATION SUMMIT 17 Hong Kong Science Park Science,
Shaping the future Robots Leaving the Production Halls Opportunities and Challenges Prof. Dr. Roland Siegwart www.asl.ethz.ch www.wysszurich.ch APAC INNOVATION SUMMIT 17 Hong Kong Science Park Science,
A simple embedded stereoscopic vision system for an autonomous rover
 In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 A simple embedded stereoscopic vision
In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 A simple embedded stereoscopic vision
Service Robots in an Intelligent House
 Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
FUZZY LOGIC BASED NAVIGATION SAFETY SYSTEM FOR A REMOTE CONTROLLED ORTHOPAEDIC ROBOT (OTOROB)
") International Journal of Robotics Research and Development (IJRRD) Vol.1, Issue 1 Dec 2011 21-41 TJPRC Pvt. Ltd., FUZZY LOGIC BASED NAVIGATION SAFETY SYSTEM FOR A REMOTE CONTROLLED ORTHOPAEDIC ROBOT (OTOROB)
International Journal of Robotics Research and Development (IJRRD) Vol.1, Issue 1 Dec 2011 21-41 TJPRC Pvt. Ltd., FUZZY LOGIC BASED NAVIGATION SAFETY SYSTEM FOR A REMOTE CONTROLLED ORTHOPAEDIC ROBOT (OTOROB)
Development of a Novel Zero-Turn-Radius Autonomous Vehicle
 Development of a Novel Zero-Turn-Radius Autonomous Vehicle by Charles Dean Haynie Thesis submitted to the Faculty of the Virginia Polytechnic Institute and State University in partial fulfillment of the
Development of a Novel Zero-Turn-Radius Autonomous Vehicle by Charles Dean Haynie Thesis submitted to the Faculty of the Virginia Polytechnic Institute and State University in partial fulfillment of the
REPORT ON CORPORATE GOVERNANCE OF LISTING COMPANY (6 months/2016)
") ENGLISH TRANSLATION COPY DIGIWORLD CORPORATION ------- THE SOCIALIST REPUBLIC OF VIETNAM Independence - Freedom - Happiness --------------- 03/07-2016/HĐQT/DGW Ho Chi Minh City, 22th July 2016 REPORT ON
ENGLISH TRANSLATION COPY DIGIWORLD CORPORATION ------- THE SOCIALIST REPUBLIC OF VIETNAM Independence - Freedom - Happiness --------------- 03/07-2016/HĐQT/DGW Ho Chi Minh City, 22th July 2016 REPORT ON
Formation and Cooperation for SWARMed Intelligent Robots
 Formation and Cooperation for SWARMed Intelligent Robots Wei Cao 1 Yanqing Gao 2 Jason Robert Mace 3 (West Virginia University 1 University of Arizona 2 Energy Corp. of America 3 ) Abstract This article
Formation and Cooperation for SWARMed Intelligent Robots Wei Cao 1 Yanqing Gao 2 Jason Robert Mace 3 (West Virginia University 1 University of Arizona 2 Energy Corp. of America 3 ) Abstract This article
UNIVERSIDAD CARLOS III DE MADRID ESCUELA POLITÉCNICA SUPERIOR
 UNIVERSIDAD CARLOS III DE MADRID ESCUELA POLITÉCNICA SUPERIOR TRABAJO DE FIN DE GRADO GRADO EN INGENIERÍA DE SISTEMAS DE COMUNICACIONES CONTROL CENTRALIZADO DE FLOTAS DE ROBOTS CENTRALIZED CONTROL FOR
UNIVERSIDAD CARLOS III DE MADRID ESCUELA POLITÉCNICA SUPERIOR TRABAJO DE FIN DE GRADO GRADO EN INGENIERÍA DE SISTEMAS DE COMUNICACIONES CONTROL CENTRALIZADO DE FLOTAS DE ROBOTS CENTRALIZED CONTROL FOR
No.:01/2019/CV-HDQT Hochiminh City, January CORPORATE GOVERNANCE REPORT OF THE LISTED COMPANY In 2018
 APPENDIX 05 CORPORATE GOVERNANCE REPORT (Issued under Circular No. 155/2015/TT-BTC dated October 6th 2015 of the Ministry of Finance On guidelines for information disclosure on securities market) LIX DETERGENT
APPENDIX 05 CORPORATE GOVERNANCE REPORT (Issued under Circular No. 155/2015/TT-BTC dated October 6th 2015 of the Ministry of Finance On guidelines for information disclosure on securities market) LIX DETERGENT
Estimation of Absolute Positioning of mobile robot using U-SAT
 Estimation of Absolute Positioning of mobile robot using U-SAT Su Yong Kim 1, SooHong Park 2 1 Graduate student, Department of Mechanical Engineering, Pusan National University, KumJung Ku, Pusan 609-735,
Estimation of Absolute Positioning of mobile robot using U-SAT Su Yong Kim 1, SooHong Park 2 1 Graduate student, Department of Mechanical Engineering, Pusan National University, KumJung Ku, Pusan 609-735,
Visvesvaraya Technological University, Belagavi
 Time Table for M.TECH. Examinations, June / July 2017 M. TECH. 2010 Scheme 2011 Scheme 2012 Scheme 2014 Scheme 2016 Scheme [CBCS] Semester I II III I II III I II III I II IV I II Time Date, Day 14/06/2017,
Time Table for M.TECH. Examinations, June / July 2017 M. TECH. 2010 Scheme 2011 Scheme 2012 Scheme 2014 Scheme 2016 Scheme [CBCS] Semester I II III I II III I II III I II IV I II Time Date, Day 14/06/2017,
Journal Title ISSN 5. MIS QUARTERLY BRIEFINGS IN BIOINFORMATICS
 List of Journals with impact factors Date retrieved: 1 August 2009 Journal Title ISSN Impact Factor 5-Year Impact Factor 1. ACM SURVEYS 0360-0300 9.920 14.672 2. VLDB JOURNAL 1066-8888 6.800 9.164 3. IEEE
List of Journals with impact factors Date retrieved: 1 August 2009 Journal Title ISSN Impact Factor 5-Year Impact Factor 1. ACM SURVEYS 0360-0300 9.920 14.672 2. VLDB JOURNAL 1066-8888 6.800 9.164 3. IEEE
GNSS in Autonomous Vehicles MM Vision
 GNSS in Autonomous Vehicles MM Vision MM Technology Innovation Automated Driving Technologies (ADT) Evaldo Bruci Context & motivation Within the robotic paradigm Magneti Marelli chose Think & Decision
GNSS in Autonomous Vehicles MM Vision MM Technology Innovation Automated Driving Technologies (ADT) Evaldo Bruci Context & motivation Within the robotic paradigm Magneti Marelli chose Think & Decision
Path Planning in Dynamic Environments Using Time Warps. S. Farzan and G. N. DeSouza
 Path Planning in Dynamic Environments Using Time Warps S. Farzan and G. N. DeSouza Outline Introduction Harmonic Potential Fields Rubber Band Model Time Warps Kalman Filtering Experimental Results 2 Introduction
Path Planning in Dynamic Environments Using Time Warps S. Farzan and G. N. DeSouza Outline Introduction Harmonic Potential Fields Rubber Band Model Time Warps Kalman Filtering Experimental Results 2 Introduction
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT
 MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
Intelligent Robotics Sensors and Actuators
 Intelligent Robotics Sensors and Actuators Luís Paulo Reis (University of Porto) Nuno Lau (University of Aveiro) The Perception Problem Do we need perception? Complexity Uncertainty Dynamic World Detection/Correction
Intelligent Robotics Sensors and Actuators Luís Paulo Reis (University of Porto) Nuno Lau (University of Aveiro) The Perception Problem Do we need perception? Complexity Uncertainty Dynamic World Detection/Correction
SUBMISSION Re: the replacement of Management Board Member and assigning President & CEO PetroVietnam Drilling & Well Services
 Ref. No. 07A/TT-HĐQT Hochiminh City, April 22 nd 2011 SUBMISSION Re: the replacement of Management Board Member and assigning President & CEO PetroVietnam Drilling & Well Services Address to: GENERAL SHAREHOLDERS
Ref. No. 07A/TT-HĐQT Hochiminh City, April 22 nd 2011 SUBMISSION Re: the replacement of Management Board Member and assigning President & CEO PetroVietnam Drilling & Well Services Address to: GENERAL SHAREHOLDERS
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics is the study and design of robots Robots can be used in different contexts and are classified as 1. Industrial robots
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics is the study and design of robots Robots can be used in different contexts and are classified as 1. Industrial robots
Unexploded Ordnance: Accident Survivors, International Organizations and Visions of the Vietnam War in Quang Tri Province, Central Vietnam
 Unexploded Ordnance: Accident Survivors, International Organizations and Visions of the Vietnam War in Quang Tri Province, Central Vietnam Jason Perkins Background B-52 Stratofortress over Vietnam Quang
Unexploded Ordnance: Accident Survivors, International Organizations and Visions of the Vietnam War in Quang Tri Province, Central Vietnam Jason Perkins Background B-52 Stratofortress over Vietnam Quang
Simulation of a mobile robot navigation system
 Edith Cowan University Research Online ECU Publications 2011 2011 Simulation of a mobile robot navigation system Ahmed Khusheef Edith Cowan University Ganesh Kothapalli Edith Cowan University Majid Tolouei
Edith Cowan University Research Online ECU Publications 2011 2011 Simulation of a mobile robot navigation system Ahmed Khusheef Edith Cowan University Ganesh Kothapalli Edith Cowan University Majid Tolouei
Walking and Flying Robots for Challenging Environments
 Shaping the future Walking and Flying Robots for Challenging Environments Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch Lisbon, Portugal, July 29, 2016 Roland Siegwart 29.07.2016 1 Content
Shaping the future Walking and Flying Robots for Challenging Environments Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch Lisbon, Portugal, July 29, 2016 Roland Siegwart 29.07.2016 1 Content
Wheeled Mobile Robot Obstacle Avoidance Using Compass and Ultrasonic
 Universal Journal of Control and Automation 6(1): 13-18, 2018 DOI: 10.13189/ujca.2018.060102 http://www.hrpub.org Wheeled Mobile Robot Obstacle Avoidance Using Compass and Ultrasonic Yousef Moh. Abueejela
Universal Journal of Control and Automation 6(1): 13-18, 2018 DOI: 10.13189/ujca.2018.060102 http://www.hrpub.org Wheeled Mobile Robot Obstacle Avoidance Using Compass and Ultrasonic Yousef Moh. Abueejela
Vision-based Localization and Mapping with Heterogeneous Teams of Ground and Micro Flying Robots
 Vision-based Localization and Mapping with Heterogeneous Teams of Ground and Micro Flying Robots Davide Scaramuzza Robotics and Perception Group University of Zurich http://rpg.ifi.uzh.ch All videos in
Vision-based Localization and Mapping with Heterogeneous Teams of Ground and Micro Flying Robots Davide Scaramuzza Robotics and Perception Group University of Zurich http://rpg.ifi.uzh.ch All videos in
Distributed Robotics From Science to Systems
 Distributed Robotics From Science to Systems Nikolaus Correll Distributed Robotics Laboratory, CSAIL, MIT August 8, 2008 Distributed Robotic Systems DRS 1 sensor 1 actuator... 1 device Applications Giant,
Distributed Robotics From Science to Systems Nikolaus Correll Distributed Robotics Laboratory, CSAIL, MIT August 8, 2008 Distributed Robotic Systems DRS 1 sensor 1 actuator... 1 device Applications Giant,
Eurathlon Scenario Application Paper (SAP) Review Sheet
 Review Sheet") Eurathlon 2013 Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario Space Applications Reconnaissance and surveillance in urban structures (USAR) For each of the following aspects, especially
Eurathlon 2013 Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario Space Applications Reconnaissance and surveillance in urban structures (USAR) For each of the following aspects, especially
Shoichi MAEYAMA Akihisa OHYA and Shin'ichi YUTA. University of Tsukuba. Tsukuba, Ibaraki, 305 JAPAN
 Long distance outdoor navigation of an autonomous mobile robot by playback of Perceived Route Map Shoichi MAEYAMA Akihisa OHYA and Shin'ichi YUTA Intelligent Robot Laboratory Institute of Information Science
Long distance outdoor navigation of an autonomous mobile robot by playback of Perceived Route Map Shoichi MAEYAMA Akihisa OHYA and Shin'ichi YUTA Intelligent Robot Laboratory Institute of Information Science
Future Intelligent Machines
 Future Intelligent Machines TKK GIM research institute Content of the talk Introductory remarks Intelligent machines Subsystems technology and modularity Robots and biology Robots in homes Introductory
Future Intelligent Machines TKK GIM research institute Content of the talk Introductory remarks Intelligent machines Subsystems technology and modularity Robots and biology Robots in homes Introductory
CAPACITIES FOR TECHNOLOGY TRANSFER
 CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
BUILDING A SWARM OF ROBOTIC BEES
 World Automation Congress 2010 TSI Press. BUILDING A SWARM OF ROBOTIC BEES ALEKSANDAR JEVTIC (1), PEYMON GAZI (2), DIEGO ANDINA (1), Mo JAMSHlDI (2) (1) Group for Automation in Signal and Communications,
World Automation Congress 2010 TSI Press. BUILDING A SWARM OF ROBOTIC BEES ALEKSANDAR JEVTIC (1), PEYMON GAZI (2), DIEGO ANDINA (1), Mo JAMSHlDI (2) (1) Group for Automation in Signal and Communications,
PROJECTS 2017/18 AUTONOMOUS SYSTEMS. Instituto Superior Técnico. Departamento de Engenharia Electrotécnica e de Computadores September 2017
 AUTONOMOUS SYSTEMS PROJECTS 2017/18 Instituto Superior Técnico Departamento de Engenharia Electrotécnica e de Computadores September 2017 LIST OF AVAILABLE ROBOTS AND DEVICES 7 Pioneers 3DX (with Hokuyo
AUTONOMOUS SYSTEMS PROJECTS 2017/18 Instituto Superior Técnico Departamento de Engenharia Electrotécnica e de Computadores September 2017 LIST OF AVAILABLE ROBOTS AND DEVICES 7 Pioneers 3DX (with Hokuyo
COMPACT FUZZY Q LEARNING FOR AUTONOMOUS MOBILE ROBOT NAVIGATION
 COMPACT FUZZY Q LEARNING FOR AUTONOMOUS MOBILE ROBOT NAVIGATION Handy Wicaksono, Khairul Anam 2, Prihastono 3, Indra Adjie Sulistijono 4, Son Kuswadi 5 Department of Electrical Engineering, Petra Christian
COMPACT FUZZY Q LEARNING FOR AUTONOMOUS MOBILE ROBOT NAVIGATION Handy Wicaksono, Khairul Anam 2, Prihastono 3, Indra Adjie Sulistijono 4, Son Kuswadi 5 Department of Electrical Engineering, Petra Christian
Proseminar Roboter und Aktivmedien. Outline of today s lecture. Acknowledgments. Educational robots achievements and challenging
 Proseminar Roboter und Aktivmedien Educational robots achievements and challenging Lecturer Lecturer Houxiang Houxiang Zhang Zhang TAMS, TAMS, Department Department of of Informatics Informatics University
Proseminar Roboter und Aktivmedien Educational robots achievements and challenging Lecturer Lecturer Houxiang Houxiang Zhang Zhang TAMS, TAMS, Department Department of of Informatics Informatics University
Dr. Wenjie Dong. The University of Texas Rio Grande Valley Department of Electrical Engineering (956)
") Dr. Wenjie Dong The University of Texas Rio Grande Valley Department of Electrical Engineering (956) 665-2200 Email: wenjie.dong@utrgv.edu EDUCATION PhD, University of California, Riverside, 2009 Major:
Dr. Wenjie Dong The University of Texas Rio Grande Valley Department of Electrical Engineering (956) 665-2200 Email: wenjie.dong@utrgv.edu EDUCATION PhD, University of California, Riverside, 2009 Major:
Autonomous Stair Climbing Algorithm for a Small Four-Tracked Robot
 Autonomous Stair Climbing Algorithm for a Small Four-Tracked Robot Quy-Hung Vu, Byeong-Sang Kim, Jae-Bok Song Korea University 1 Anam-dong, Seongbuk-gu, Seoul, Korea vuquyhungbk@yahoo.com, lovidia@korea.ac.kr,
Autonomous Stair Climbing Algorithm for a Small Four-Tracked Robot Quy-Hung Vu, Byeong-Sang Kim, Jae-Bok Song Korea University 1 Anam-dong, Seongbuk-gu, Seoul, Korea vuquyhungbk@yahoo.com, lovidia@korea.ac.kr,
Fuzzy Logic Based Robot Navigation In Uncertain Environments By Multisensor Integration
 Proceedings of the 1994 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MF1 94) Las Vega, NV Oct. 2-5, 1994 Fuzzy Logic Based Robot Navigation In Uncertain
Proceedings of the 1994 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MF1 94) Las Vega, NV Oct. 2-5, 1994 Fuzzy Logic Based Robot Navigation In Uncertain
Eurathlon Scenario Application Paper (SAP) Review Sheet
 Review Sheet") Eurathlon 2013 Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario Space Applications Services Mobile manipulation for handling hazardous material For each of the following aspects, especially
Eurathlon 2013 Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario Space Applications Services Mobile manipulation for handling hazardous material For each of the following aspects, especially
2012 IEEE RIVF International Conference on Computing & Communication Technologies, Research, Innovation, and Vision for the Future (RIVF 2012)
") 2012 IEEE RIVF International Conference on Computing & Communication Technologies, Research, Innovation, and Vision for the Future (RIVF 2012) Ho Chi Minh City, Vietnam 27- February 1 March 2012 IEEE Catalog
2012 IEEE RIVF International Conference on Computing & Communication Technologies, Research, Innovation, and Vision for the Future (RIVF 2012) Ho Chi Minh City, Vietnam 27- February 1 March 2012 IEEE Catalog
Implementation of remotely controllable Mobile Robot System over Mobile Ad-hoc Network
 Implementation of remotely controllable Mobile Robot System over Mobile Ad-hoc Network Mohammad Shahidul Hasan Faculty of Computing, Engineering and Sciences Staffordshire University, UK m.s.hasan@staffs.ac.uk
Implementation of remotely controllable Mobile Robot System over Mobile Ad-hoc Network Mohammad Shahidul Hasan Faculty of Computing, Engineering and Sciences Staffordshire University, UK m.s.hasan@staffs.ac.uk
Estimation and Control of Lateral Displacement of Electric Vehicle Using WPT Information
 Estimation and Control of Lateral Displacement of Electric Vehicle Using WPT Information Pakorn Sukprasert Department of Electrical Engineering and Information Systems, The University of Tokyo Tokyo, Japan
Estimation and Control of Lateral Displacement of Electric Vehicle Using WPT Information Pakorn Sukprasert Department of Electrical Engineering and Information Systems, The University of Tokyo Tokyo, Japan
Appendices. 1. Member List of the Study Team. 2. Study Schedule. 3. Minutes of Discussions
 Appendices 1. Member List of the Study Team 2. Study Schedule 3. Minutes of Discussions 56 Appendices Contents 1.MEMBER LIST OF THE STUDY TEAM -----------------------------------------------------------------
Appendices 1. Member List of the Study Team 2. Study Schedule 3. Minutes of Discussions 56 Appendices Contents 1.MEMBER LIST OF THE STUDY TEAM -----------------------------------------------------------------
2013 RESEARCH EXPERIENCE FOR TEACHERS - ROBOTICS
 2013 RESEARCH EXPERIENCE FOR TEACHERS - ROBOTICS ELIZABETH FREEMAN JESSE BELL RET (Research Experiences for Teachers) Site on Networks, Electrical Engineering Department, and Institute of Applied Sciences,
2013 RESEARCH EXPERIENCE FOR TEACHERS - ROBOTICS ELIZABETH FREEMAN JESSE BELL RET (Research Experiences for Teachers) Site on Networks, Electrical Engineering Department, and Institute of Applied Sciences,
Creating a 3D environment map from 2D camera images in robotics
 Creating a 3D environment map from 2D camera images in robotics J.P. Niemantsverdriet jelle@niemantsverdriet.nl 4th June 2003 Timorstraat 6A 9715 LE Groningen student number: 0919462 internal advisor:
Creating a 3D environment map from 2D camera images in robotics J.P. Niemantsverdriet jelle@niemantsverdriet.nl 4th June 2003 Timorstraat 6A 9715 LE Groningen student number: 0919462 internal advisor:
Sensor Data Fusion Using Kalman Filter
 Sensor Data Fusion Using Kalman Filter J.Z. Sasiade and P. Hartana Department of Mechanical & Aerospace Engineering arleton University 115 olonel By Drive Ottawa, Ontario, K1S 5B6, anada e-mail: jsas@ccs.carleton.ca
Sensor Data Fusion Using Kalman Filter J.Z. Sasiade and P. Hartana Department of Mechanical & Aerospace Engineering arleton University 115 olonel By Drive Ottawa, Ontario, K1S 5B6, anada e-mail: jsas@ccs.carleton.ca
OPEN CV BASED AUTONOMOUS RC-CAR
 OPEN CV BASED AUTONOMOUS RC-CAR B. Sabitha 1, K. Akila 2, S.Krishna Kumar 3, D.Mohan 4, P.Nisanth 5 1,2 Faculty, Department of Mechatronics Engineering, Kumaraguru College of Technology, Coimbatore, India
OPEN CV BASED AUTONOMOUS RC-CAR B. Sabitha 1, K. Akila 2, S.Krishna Kumar 3, D.Mohan 4, P.Nisanth 5 1,2 Faculty, Department of Mechatronics Engineering, Kumaraguru College of Technology, Coimbatore, India
Real-Time Bilateral Control for an Internet-Based Telerobotic System
 708 Real-Time Bilateral Control for an Internet-Based Telerobotic System Jahng-Hyon PARK, Joonyoung PARK and Seungjae MOON There is a growing tendency to use the Internet as the transmission medium of
708 Real-Time Bilateral Control for an Internet-Based Telerobotic System Jahng-Hyon PARK, Joonyoung PARK and Seungjae MOON There is a growing tendency to use the Internet as the transmission medium of
Implementation of a Self-Driven Robot for Remote Surveillance
 International Journal of Research Studies in Science, Engineering and Technology Volume 2, Issue 11, November 2015, PP 35-39 ISSN 2349-4751 (Print) & ISSN 2349-476X (Online) Implementation of a Self-Driven
International Journal of Research Studies in Science, Engineering and Technology Volume 2, Issue 11, November 2015, PP 35-39 ISSN 2349-4751 (Print) & ISSN 2349-476X (Online) Implementation of a Self-Driven
Recent Progress on Wearable Augmented Interaction at AIST
 Recent Progress on Wearable Augmented Interaction at AIST Takeshi Kurata 12 1 Human Interface Technology Lab University of Washington 2 AIST, Japan kurata@ieee.org Weavy The goal of the Weavy project team
Recent Progress on Wearable Augmented Interaction at AIST Takeshi Kurata 12 1 Human Interface Technology Lab University of Washington 2 AIST, Japan kurata@ieee.org Weavy The goal of the Weavy project team
Assisting and Guiding Visually Impaired in Indoor Environments
 Avestia Publishing 9 International Journal of Mechanical Engineering and Mechatronics Volume 1, Issue 1, Year 2012 Journal ISSN: 1929-2724 Article ID: 002, DOI: 10.11159/ijmem.2012.002 Assisting and Guiding
Avestia Publishing 9 International Journal of Mechanical Engineering and Mechatronics Volume 1, Issue 1, Year 2012 Journal ISSN: 1929-2724 Article ID: 002, DOI: 10.11159/ijmem.2012.002 Assisting and Guiding
A COMPUTER VISION AND MACHINE LEARNING SYSTEM FOR BIRD AND BAT DETECTION AND FORECASTING
 A COMPUTER VISION AND MACHINE LEARNING SYSTEM FOR BIRD AND BAT DETECTION AND FORECASTING Russell Conard Wind Wildlife Research Meeting X December 2-5, 2014 Broomfield, CO INTRODUCTION Presenting for Engagement
A COMPUTER VISION AND MACHINE LEARNING SYSTEM FOR BIRD AND BAT DETECTION AND FORECASTING Russell Conard Wind Wildlife Research Meeting X December 2-5, 2014 Broomfield, CO INTRODUCTION Presenting for Engagement
Curriculum Vitae. Computer Vision, Image Processing, Biometrics. Computer Vision, Vision Rehabilitation, Vision Science
 Curriculum Vitae Date Prepared: 01/09/2016 (last updated: 09/12/2016) Name: Shrinivas J. Pundlik Education 07/2002 B.E. (Bachelor of Engineering) Electronics Engineering University of Pune, Pune, India
Curriculum Vitae Date Prepared: 01/09/2016 (last updated: 09/12/2016) Name: Shrinivas J. Pundlik Education 07/2002 B.E. (Bachelor of Engineering) Electronics Engineering University of Pune, Pune, India
Instituto Nacional de Ciência e Tecnologia em Sistemas Embarcados Críticos
 Instituto Nacional de Ciência e Tecnologia em Sistemas Embarcados Críticos INCT-SEC José Carlos Maldonado ICMC/USP LRM Laboratóriode Robótica Móvel Principais Projetos: GT1, GT2 e GT3 GT 1 - Robôs Táticos
Instituto Nacional de Ciência e Tecnologia em Sistemas Embarcados Críticos INCT-SEC José Carlos Maldonado ICMC/USP LRM Laboratóriode Robótica Móvel Principais Projetos: GT1, GT2 e GT3 GT 1 - Robôs Táticos
ARCHITECTURE AND MODEL OF DATA INTEGRATION BETWEEN MANAGEMENT SYSTEMS AND AGRICULTURAL MACHINES FOR PRECISION AGRICULTURE
 ARCHITECTURE AND MODEL OF DATA INTEGRATION BETWEEN MANAGEMENT SYSTEMS AND AGRICULTURAL MACHINES FOR PRECISION AGRICULTURE W. C. Lopes, R. R. D. Pereira, M. L. Tronco, A. J. V. Porto NepAS [Center for Teaching
ARCHITECTURE AND MODEL OF DATA INTEGRATION BETWEEN MANAGEMENT SYSTEMS AND AGRICULTURAL MACHINES FOR PRECISION AGRICULTURE W. C. Lopes, R. R. D. Pereira, M. L. Tronco, A. J. V. Porto NepAS [Center for Teaching
THESIS - SCHOOL OF ELECTRONICS & ENGINEERING
 No Class No Cutter Titles Author Advisor Item No Year Pages 1 621.3994 N5764P 3D object recognition +CD Nguyen Dang Phuoc M.Eng Do Ngoc Hun2000383 2009 60 2 621.382 L4331H 1.8 GHZ low noise amplifier design
No Class No Cutter Titles Author Advisor Item No Year Pages 1 621.3994 N5764P 3D object recognition +CD Nguyen Dang Phuoc M.Eng Do Ngoc Hun2000383 2009 60 2 621.382 L4331H 1.8 GHZ low noise amplifier design
MALAYSIA. Hang Tuah Jaya, Melaka, MALAYSIA. Hang Tuah Jaya, Melaka, MALAYSIA. Tunggal, Hang Tuah Jaya, Melaka, MALAYSIA
 Advanced Materials Research Vol. 903 (2014) pp 321-326 Online: 2014-02-27 (2014) Trans Tech Publications, Switzerland doi:10.4028/www.scientific.net/amr.903.321 Modeling and Simulation of Swarm Intelligence
Advanced Materials Research Vol. 903 (2014) pp 321-326 Online: 2014-02-27 (2014) Trans Tech Publications, Switzerland doi:10.4028/www.scientific.net/amr.903.321 Modeling and Simulation of Swarm Intelligence
RoboCup. Presented by Shane Murphy April 24, 2003
 RoboCup Presented by Shane Murphy April 24, 2003 RoboCup: : Today and Tomorrow What we have learned Authors Minoru Asada (Osaka University, Japan), Hiroaki Kitano (Sony CS Labs, Japan), Itsuki Noda (Electrotechnical(
RoboCup Presented by Shane Murphy April 24, 2003 RoboCup: : Today and Tomorrow What we have learned Authors Minoru Asada (Osaka University, Japan), Hiroaki Kitano (Sony CS Labs, Japan), Itsuki Noda (Electrotechnical(
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics studies robots For history and definitions see the 2013 slides http://www.ladispe.polito.it/corsi/meccatronica/01peeqw/2014-15/slides/robotics_2013_01_a_brief_history.pdf
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics studies robots For history and definitions see the 2013 slides http://www.ladispe.polito.it/corsi/meccatronica/01peeqw/2014-15/slides/robotics_2013_01_a_brief_history.pdf
A Feasibility Study of Time-Domain Passivity Approach for Bilateral Teleoperation of Mobile Manipulator
 International Conference on Control, Automation and Systems 2008 Oct. 14-17, 2008 in COEX, Seoul, Korea A Feasibility Study of Time-Domain Passivity Approach for Bilateral Teleoperation of Mobile Manipulator
International Conference on Control, Automation and Systems 2008 Oct. 14-17, 2008 in COEX, Seoul, Korea A Feasibility Study of Time-Domain Passivity Approach for Bilateral Teleoperation of Mobile Manipulator
SnakeSIM: a Snake Robot Simulation Framework for Perception-Driven Obstacle-Aided Locomotion
 : a Snake Robot Simulation Framework for Perception-Driven Obstacle-Aided Locomotion Filippo Sanfilippo 1, Øyvind Stavdahl 1 and Pål Liljebäck 1 1 Dept. of Engineering Cybernetics, Norwegian University
: a Snake Robot Simulation Framework for Perception-Driven Obstacle-Aided Locomotion Filippo Sanfilippo 1, Øyvind Stavdahl 1 and Pål Liljebäck 1 1 Dept. of Engineering Cybernetics, Norwegian University
INTRODUCTION. a complex system, that using new information technologies (software & hardware) combined
 combined") COMPUTATIONAL INTELLIGENCE & APPLICATIONS INTRODUCTION What is an INTELLIGENT SYSTEM? a complex system, that using new information technologies (software & hardware) combined with communication technologies,
COMPUTATIONAL INTELLIGENCE & APPLICATIONS INTRODUCTION What is an INTELLIGENT SYSTEM? a complex system, that using new information technologies (software & hardware) combined with communication technologies,
Obstacle avoidance based on fuzzy logic method for mobile robots in Cluttered Environment
 Obstacle avoidance based on fuzzy logic method for mobile robots in Cluttered Environment Fatma Boufera 1, Fatima Debbat 2 1,2 Mustapha Stambouli University, Math and Computer Science Department Faculty
Obstacle avoidance based on fuzzy logic method for mobile robots in Cluttered Environment Fatma Boufera 1, Fatima Debbat 2 1,2 Mustapha Stambouli University, Math and Computer Science Department Faculty
RoboCupRescue Rescue Robot League Team YRA (IRAN) Islamic Azad University of YAZD, Prof. Hesabi Ave. Safaeie, YAZD,IRAN
 Islamic Azad University of YAZD, Prof. Hesabi Ave. Safaeie, YAZD,IRAN") RoboCupRescue 2014 - Rescue Robot League Team YRA (IRAN) Abolfazl Zare-Shahabadi 1, Seyed Ali Mohammad Mansouri-Tezenji 2 1 Mechanical engineering department Islamic Azad University of YAZD, Prof. Hesabi
RoboCupRescue 2014 - Rescue Robot League Team YRA (IRAN) Abolfazl Zare-Shahabadi 1, Seyed Ali Mohammad Mansouri-Tezenji 2 1 Mechanical engineering department Islamic Azad University of YAZD, Prof. Hesabi
RECOMMENDED TRADE FAIRS AND EXHIBITIONS IN VIET NAM
 MINISTRY OF INDUSTRY AND TRADE VIET NAM TRADE PROMOTION AGENCY RECOMMENDED TRADE FAIRS AND EXHIBITIONS IN VIET NAM 2008 VIET NAM, 2008 1 No. Exhibition Exhibits Time Venue Frequency Organizer No. of booths
MINISTRY OF INDUSTRY AND TRADE VIET NAM TRADE PROMOTION AGENCY RECOMMENDED TRADE FAIRS AND EXHIBITIONS IN VIET NAM 2008 VIET NAM, 2008 1 No. Exhibition Exhibits Time Venue Frequency Organizer No. of booths
A Robotic Simulator Tool for Mobile Robots
 2016 Published in 4th International Symposium on Innovative Technologies in Engineering and Science 3-5 November 2016 (ISITES2016 Alanya/Antalya - Turkey) A Robotic Simulator Tool for Mobile Robots 1 Mehmet
2016 Published in 4th International Symposium on Innovative Technologies in Engineering and Science 3-5 November 2016 (ISITES2016 Alanya/Antalya - Turkey) A Robotic Simulator Tool for Mobile Robots 1 Mehmet
Introduction of the RSJ
 Introduction of the RSJ (RSJ) 0 Copyright c cthe The Robotics Robotics Society Society of Japan, of All Japan, Rights All Reserved Rights Reserved CONTENTS 1. About the RSJ: Purposes, Activities Organization,
Introduction of the RSJ (RSJ) 0 Copyright c cthe The Robotics Robotics Society Society of Japan, of All Japan, Rights All Reserved Rights Reserved CONTENTS 1. About the RSJ: Purposes, Activities Organization,
Image Recognition for PCB Soldering Platform Controlled by Embedded Microchip Based on Hopfield Neural Network
 436 JOURNAL OF COMPUTERS, VOL. 5, NO. 9, SEPTEMBER Image Recognition for PCB Soldering Platform Controlled by Embedded Microchip Based on Hopfield Neural Network Chung-Chi Wu Department of Electrical Engineering,
436 JOURNAL OF COMPUTERS, VOL. 5, NO. 9, SEPTEMBER Image Recognition for PCB Soldering Platform Controlled by Embedded Microchip Based on Hopfield Neural Network Chung-Chi Wu Department of Electrical Engineering,
Glossary of terms. Short explanation
 Glossary Concept Module. Video Short explanation Abstraction 2.4 Capturing the essence of the behavior of interest (getting a model or representation) Action in the control Derivative 4.2 The control signal
Glossary Concept Module. Video Short explanation Abstraction 2.4 Capturing the essence of the behavior of interest (getting a model or representation) Action in the control Derivative 4.2 The control signal
Structure and Synthesis of Robot Motion
 Structure and Synthesis of Robot Motion Motion Synthesis in Groups and Formations I Subramanian Ramamoorthy School of Informatics 5 March 2012 Consider Motion Problems with Many Agents How should we model
Structure and Synthesis of Robot Motion Motion Synthesis in Groups and Formations I Subramanian Ramamoorthy School of Informatics 5 March 2012 Consider Motion Problems with Many Agents How should we model
Prediction of Human s Movement for Collision Avoidance of Mobile Robot
 Prediction of Human s Movement for Collision Avoidance of Mobile Robot Shunsuke Hamasaki, Yusuke Tamura, Atsushi Yamashita and Hajime Asama Abstract In order to operate mobile robot that can coexist with
Prediction of Human s Movement for Collision Avoidance of Mobile Robot Shunsuke Hamasaki, Yusuke Tamura, Atsushi Yamashita and Hajime Asama Abstract In order to operate mobile robot that can coexist with
Site-specific Bioaccumulation of PCDD/PCDFs in Mothers and their Infants Living in Vicinity of Bien Hoa Airbase, Southern Vietnam
 4 th International Forum on Sustainable Future in Asia 4 th NIES International Forum Site-specific Bioaccumulation of PCDD/PCDFs in Mothers and their Infants Living in Vicinity of Bien Hoa Airbase, Southern
4 th International Forum on Sustainable Future in Asia 4 th NIES International Forum Site-specific Bioaccumulation of PCDD/PCDFs in Mothers and their Infants Living in Vicinity of Bien Hoa Airbase, Southern
Robotic Technology for Port and Maritime Automation
 Industrial/Service Robots Field Robots Robotic Technology for Port and Maritime Automation Presenter: Assoc Prof Chen I-Ming Director, Robotics Research Center & Intelligent Systems Center School of Mechanical
Industrial/Service Robots Field Robots Robotic Technology for Port and Maritime Automation Presenter: Assoc Prof Chen I-Ming Director, Robotics Research Center & Intelligent Systems Center School of Mechanical
Control issues in cognitive networks. Marko Höyhtyä and Tao Chen CWC-VTT-Gigaseminar 4th December 2008
 Control issues in cognitive networks Marko Höyhtyä and Tao Chen CWC-VTT-Gigaseminar 4th December 2008 Outline Cognitive wireless networks Cognitive mesh Topology control Frequency selection Power control
Control issues in cognitive networks Marko Höyhtyä and Tao Chen CWC-VTT-Gigaseminar 4th December 2008 Outline Cognitive wireless networks Cognitive mesh Topology control Frequency selection Power control
Using Reactive and Adaptive Behaviors to Play Soccer
 AI Magazine Volume 21 Number 3 (2000) ( AAAI) Articles Using Reactive and Adaptive Behaviors to Play Soccer Vincent Hugel, Patrick Bonnin, and Pierre Blazevic This work deals with designing simple behaviors
AI Magazine Volume 21 Number 3 (2000) ( AAAI) Articles Using Reactive and Adaptive Behaviors to Play Soccer Vincent Hugel, Patrick Bonnin, and Pierre Blazevic This work deals with designing simple behaviors
Artificial Beacons with RGB-D Environment Mapping for Indoor Mobile Robot Localization
 Sensors and Materials, Vol. 28, No. 6 (2016) 695 705 MYU Tokyo 695 S & M 1227 Artificial Beacons with RGB-D Environment Mapping for Indoor Mobile Robot Localization Chun-Chi Lai and Kuo-Lan Su * Department
Sensors and Materials, Vol. 28, No. 6 (2016) 695 705 MYU Tokyo 695 S & M 1227 Artificial Beacons with RGB-D Environment Mapping for Indoor Mobile Robot Localization Chun-Chi Lai and Kuo-Lan Su * Department
YUMI IWASHITA
 YUMI IWASHITA yumi@ieee.org http://robotics.ait.kyushu-u.ac.jp/~yumi/index-e.html RESEARCH INTERESTS Computer vision for robotics applications, such as motion capture system using multiple cameras and
YUMI IWASHITA yumi@ieee.org http://robotics.ait.kyushu-u.ac.jp/~yumi/index-e.html RESEARCH INTERESTS Computer vision for robotics applications, such as motion capture system using multiple cameras and
GPS data correction using encoders and INS sensors
 GPS data correction using encoders and INS sensors Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, Avenue de la Renaissance 30, 1000 Brussels, Belgium sidahmed.berrabah@rma.ac.be
GPS data correction using encoders and INS sensors Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, Avenue de la Renaissance 30, 1000 Brussels, Belgium sidahmed.berrabah@rma.ac.be
COMPUTER SCIENCE AND ENGINEERING
 COMPUTER SCIENCE AND ENGINEERING Internet of Thing Cloud Computing Big Data Analytics Network Security Distributed System Image Processing Data Science Business Intelligence Wireless Sensor Network Artificial
COMPUTER SCIENCE AND ENGINEERING Internet of Thing Cloud Computing Big Data Analytics Network Security Distributed System Image Processing Data Science Business Intelligence Wireless Sensor Network Artificial
Design and Implementation of a Service Robot System based on Ubiquitous Sensor Networks
 Proceedings of the 6th WSEAS International Conference on Signal Processing, Robotics and Automation, Corfu Island, Greece, February 16-19, 2007 171 Design and Implementation of a Service Robot System based
Proceedings of the 6th WSEAS International Conference on Signal Processing, Robotics and Automation, Corfu Island, Greece, February 16-19, 2007 171 Design and Implementation of a Service Robot System based
Transer Learning : Super Intelligence
 Transer Learning : Super Intelligence GIS Group Dr Narayan Panigrahi, MA Rajesh, Shibumon Alampatta, Rakesh K P of Centre for AI and Robotics, Defence Research and Development Organization, C V Raman Nagar,
Transer Learning : Super Intelligence GIS Group Dr Narayan Panigrahi, MA Rajesh, Shibumon Alampatta, Rakesh K P of Centre for AI and Robotics, Defence Research and Development Organization, C V Raman Nagar,
Autonomous Mobile Robot Design. Dr. Kostas Alexis (CSE)
") Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
AI MAGAZINE AMER ASSOC ARTIFICIAL INTELL UNITED STATES English ANNALS OF MATHEMATICS AND ARTIFICIAL
 Title Publisher ISSN Country Language ACM Transactions on Autonomous and Adaptive Systems ASSOC COMPUTING MACHINERY 1556-4665 UNITED STATES English ACM Transactions on Intelligent Systems and Technology
Title Publisher ISSN Country Language ACM Transactions on Autonomous and Adaptive Systems ASSOC COMPUTING MACHINERY 1556-4665 UNITED STATES English ACM Transactions on Intelligent Systems and Technology
Rapid Development System for Humanoid Vision-based Behaviors with Real-Virtual Common Interface
 Rapid Development System for Humanoid Vision-based Behaviors with Real-Virtual Common Interface Kei Okada 1, Yasuyuki Kino 1, Fumio Kanehiro 2, Yasuo Kuniyoshi 1, Masayuki Inaba 1, Hirochika Inoue 1 1
Rapid Development System for Humanoid Vision-based Behaviors with Real-Virtual Common Interface Kei Okada 1, Yasuyuki Kino 1, Fumio Kanehiro 2, Yasuo Kuniyoshi 1, Masayuki Inaba 1, Hirochika Inoue 1 1
Challenges for AI: Mobile Robots on Construction Sites. Tim Detert
 Challenges for AI: Mobile Robots on Construction Sites Tim Detert Challenges for AI: Mobile Robots on Construction Sites What will Mobile Robots on Construction Sites be Like? In the future it eventually
Challenges for AI: Mobile Robots on Construction Sites Tim Detert Challenges for AI: Mobile Robots on Construction Sites What will Mobile Robots on Construction Sites be Like? In the future it eventually
Fuzzy-Heuristic Robot Navigation in a Simulated Environment
 Fuzzy-Heuristic Robot Navigation in a Simulated Environment S. K. Deshpande, M. Blumenstein and B. Verma School of Information Technology, Griffith University-Gold Coast, PMB 50, GCMC, Bundall, QLD 9726,
Fuzzy-Heuristic Robot Navigation in a Simulated Environment S. K. Deshpande, M. Blumenstein and B. Verma School of Information Technology, Griffith University-Gold Coast, PMB 50, GCMC, Bundall, QLD 9726,
MECHATRONICS IN BIOMEDICAL APPLICATIONS AND BIOMECHATRONICS
 MECHATRONICS IN BIOMEDICAL APPLICATIONS AND BIOMECHATRONICS Job van Amerongen Cornelis J. Drebbel Research Institute for Systems Engineering, Faculty of Electrical Engineering, University of Twente, P.O.
MECHATRONICS IN BIOMEDICAL APPLICATIONS AND BIOMECHATRONICS Job van Amerongen Cornelis J. Drebbel Research Institute for Systems Engineering, Faculty of Electrical Engineering, University of Twente, P.O.
Available theses (October 2011) MERLIN Group
 MERLIN Group") Available theses (October 2011) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
Available theses (October 2011) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it