PerSec. Pervasive Computing and Security Lab. Enabling Transportation Safety Services Using Mobile Devices
|
|
|
- Carol McCoy
- 5 years ago
- Views:
Transcription

1 PerSec Pervasive Computing and Security Lab Enabling Transportation Safety Services Using Mobile Devices Jie Yang Department of Computer Science Florida State University Oct. 17, 2017 CIS 5935 Introduction to Research




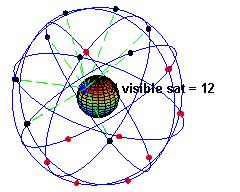




2 Background: Mobile Devices Mobile devices Smartphones, tablets, Google glasses, smart watches, wearable devices Rich sensors Wireless technologies 2
3 Background: Driving Safety & Efficiency 1 billion highway vehicles SAFETY 1.2 million traffic fatalities per year ENERGY 30% of world Energy EMISSIONS 25% of world CO2 Emissions TRAFFIC 1.5 hours per day on a vehicle 3







4 What to Sense with Mobile/Wearable Devices? Driver behaviors Cell phone distraction Drowsy driving Drunk driving Vehicle dynamics Lane changing Breaking, Acceleration Making turns Surroundings Potholes Nearby vehicles Pedestrian crossing street 4



5 Sensing Enabled Safety Services Reducing driver distraction Cell phone use, eating Drowsy driving Pedestrian safety Waling across street Talking on the phone while walking Driving safety assistant systems Curve speed warning, Dangerous location (obstacle) warning Safe distance warning Lane departure and change/merge warning Forward collision warning 5

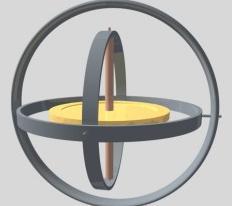
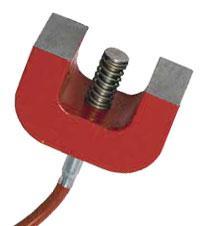
6 Gyroscope and Accelerometer: Driving Behavior Pathholes Slides: How s My Driving: Sensing Driving Behaviors by Using Smartphones 6

7 Cameras: Driving/Walking Safety Video: Video: 7
8 Case Study: Driver Phone User Detection - Audio based approach - Inertial sensors based detection - Intervention Source: Jie Yang, Simon Sidhom, Yingying Chen et al. "Detecting driver phone use leveraging car speakers." in MobiCom Yan Wang, Jie Yang, Yingying Chen et al. "Sensing Vehicle Dynamics for Determining Driver Phone Use." in MobiSys


9 Cell Phones Distract Drivers Cell phone as a distraction in 2009 on U.S. roadways 18% of fatalities in distraction-related crashes involved reports of a cell phone 995 fatalities 24,000 injuries 81% of drivers admit to talking on phone while driving 18% of drivers admit to texting while driving Talking on Hand-held Cell Visual Eyes off road Cognitive Mind off driving Texting on Hand-held Cell Manual Hands off wheel Visual Eyes off road Cognitive Mind off driving Source: Distracted Driving 2009 National Highway Traffic Safety Administration Traffic Safety Facts,





10 Cell Phone Distraction: What s Being Done? Law Several States ban handheld phone use Technology Hard blocking: radio jammer, blocking phone calls, texting, chat Soft interaction Routing incoming calls to voic , Delaying incoming text notifications Automatic reply to callers Automatic Reply: I m driving right now; will get back with you! 10



11 What s Being Done? - Is a Cell Phone in a Moving Vehicle? Current Apps that actively prevent cell phone use in vehicle ONLY detect the phone is in vehicle or not! GPS Handover Signal Strength Car s speedometer 11


12 The Driver-Passenger Challenge I am a passenger! 38% of automobile trips include passengers! Source: National highway traffic safety administration: Fatality analysis reporting system 12


13 Acoustic based Approach - Distinguish driver from passenger Utilize built-in audio infrastructure Acoustic ranging approach: distance estimation between phone and speakers Require Bluetooth hands-free system Phone connecting with head unit Symmetric positioning of speakers Source: Jie Yang, Simon Sidhom, et al. "Detecting driver phone use leveraging car speakers." in MobiCom

 t 2 - t > 0 => Closer to Front")
14 How Does It work? S 2 Right t Audio Head Unit t 2 S 3 Rear Right t 1 t 2 S 1 Left - =? S 4 Rear Left t 2 t 1 t 1 t 1 - t > 0 => Closer to Left Speaker (S 1 ) t 1 - t < 0 => Closer to Right Speaker (S 2 ) t 2 - t > 0 => Closer to Front Speaker (S 1, S 2 ) t 2 - t < 0 => Closer to Back Speaker (S 3, S 4 ) 14
15 Walkthrough of the detection system Emit beep signal Record signal Filtering Signal Detection t 1 - t Relative Ranging Driver v.s. non-driver Location Classification 15
16 Walkthrough of the detection system t 1 - t Driver v.s. non-driver Emit beep signal Record signal Filtering Signal Detection t Channel 1 Channel 2 Beep signal: two channels Relative Ranging Location Classification Beep signal design Consider two challenges: Background noise and unobtrusiveness High frequency beep Robust to noise: engine, tire/road, conversation, music Unobtrusiveness Close to human s hearing limit engine, tire/road conversation t: Music 10,000 samples Beep Frequency Range 0 50 Hz 300 Hz 1 khz 3.4kHz Beep Length: 400 samples (i.e., 10 ms) Increasing frequency 15kHz 22 khz 16
17 Walkthrough of the detection system Emit beep signal Record signal Filtering Signal Detection t 1 - t Relative Ranging Driver v.s. non-driver Location Classification Where is the beep signal? Signal distortion: Heavy multipath in-car Background noise Reduced microphone sensitivity Recorded signal 17
18 Walkthrough of the detection system t 1 - t Driver v.s. non-driver Emit beep signal Record signal Filtering Signal Relative Detection Ranging Beep signal Location Classification Filter out background noise Noise mainly located below 15kHz Beep signal frequency is above 15kHz STFT Filter Moving window size m: 32 samples Signal after Filtering 18
19 Walkthrough of the detection system Emit beep signal Record signal Filtering Signal Detection t 1 - t Relative Ranging Driver v.s. non-driver Location Classification Estimate noise mean and standard deviation: (μ, σ) Robust window W Change-point detection Identifying the first arriving beep signal that deviates from the noise Threshold t d Threshold t d: Based on noise: μ + 3 σ 99.7% confidence level of noise Signal Detection Signal Detected Robust window W : Reduce false detection 40 samples 19
20 Walkthrough of the detection system Emit beep signal Record signal Filtering Signal Detection t 1 - t Relative Ranging Driver v.s. non-driver Location Classification t 1 - t t: Predefined fixed time interval between two beep sounds t 1: Calculated time difference of arrival based on signal detection Time difference t1: Measured by sample counting t 1 - t: Relative ranging -> cell phone to two speakers 20
21 Walkthrough of the detection system Emit beep signal Record signal Filtering Signal Detection Driver v.s. Passenger With two-channel audio system: t 1 - t > 0 => Left Seats (Driver Side) t 1 - t < 0 => Right Seats t 1 - t Relative Ranging Driver v.s. non-driver Location Classification With four-channel audio system: relative ranging from the 3 rd or/and 4 th channels: t 2 t 2 - t > 0 => Front Seats t 2 - t < 0 => Rear Seats Automobile trips: 83.5%: driver only or plus one front passenger; 8.7%: a passenger behind driver seat. 21
22 Experimental Scenarios Testing positions Driver s Control Area Different number of occupants Different noise conditions Highway Driving 60MPH + music playing + w/o window opened Phones at front seats only Stationary Varying background noise: idling engine + conversation 22



23 Phones and Cars Phones Bluetooth radio 16-bit 44.1kHz sampling rate 192 RAM 528MHz MSM7200 processor Bluetooth radio 16-bit 44.1kHz sampling rate 256 RAM 600 MHz Cortex A8processor Android Developer Phone 2 iphone 3G Cars Bluetooth radio Two channel audio system two front and two rear speakers Interior dimension Car I: 175 x 183 cm Car II: 185x 203cm Honda Civic Si Coupe Acura sedan 23

24 Results: Position Accuracy Cup-holder v.s. co-driver left 24






25 Low-Infrastructure Approach - Using Centripetal Acceleration v a r ω r ω a v Key Insight: v: tangential speed a: centripetal acceleration ω: angular speed r: radius The centripetal acceleration varies depending on the position in the car Source: Yan Wang, Jie Yang, et al. "Sensing Vehicle Dynamics for Determining Driver Phone Use." in MobiSys





26 Obtaining Centripetal Acceleration from Different References Cigarette lighter adapter with accelerometer Obtain vehicle's centripetal acceleration OBDII port adapter Obtain vehicle's speed Second phone on the passenger side 26



27 Leveraging Multiple Turns and Mixed Turns Accumulate a few turns use simple majority voting process to improve accuracy Utilize mixed turns left and right turns - eliminate bias from reference point e.g., speed from OBDII is overestimated due to worn tires Use normalized centripetal acceleration difference: independent of the bias, turn size and driving speed Driver Turn #1 Turn #1 Decision Passenger Turn #2 Turn #2 Decision Driver Turn #3 Turn #3 Decision t Majority vote: Driver 27



28 Experimental Setup Different testing positions Different driving environments Parking Lots: 117 turns Urban: 570 turns Suburban: 430 turns Hoboken, NJ Urban City Pontiac, MI Suburban 28




29 Phones and Cars Phones 1GHz ARM A8 CPU 512M RAM ios samples/s 1.2GHz MSM8660 CPU 1G RAM Android samples/s Cars iphone 4 HTC 3D Honda Accord (car A) Acura sedan (car B) 29



30 Opportunistically Using Dual Phones High detection accuracy at positions away from the center of the vehicle Robust in different driving environments 30
31 Interventions Hard block Block phone calls, texting, chat Soft intervention Routing incoming calls to voic , Delaying incoming text notifications Automatic reply to callers Posting driving status on social medium networks Automatic Reply: I m driving right now; will get back with you! 31



32 DRIVE SAFELY TALK & TEXT LATER 32
Sensing Driver Phone Use with Acoustic Ranging Through Car Speakers
 1 Sensing Driver Phone Use with Acoustic Ranging Through Car Speakers Jie Yang, Student Member, IEEE, Simon Sidhom, Gayathri Chandrasekaran, Tam Vu, Hongbo Liu, Student Member, IEEE, Nicolae Cecan, Yingying
1 Sensing Driver Phone Use with Acoustic Ranging Through Car Speakers Jie Yang, Student Member, IEEE, Simon Sidhom, Gayathri Chandrasekaran, Tam Vu, Hongbo Liu, Student Member, IEEE, Nicolae Cecan, Yingying
DISTINGUISHING driver and passenger phone use is a
 1426 IEEE TRANSACTIONS ON MOBILE COMPUTING, VOL. 11, NO. 9, SEPTEMBER 2012 Sensing Driver Phone Use with Acoustic Ranging through Car Speakers Jie Yang, Student Member, IEEE, Simon Sidhom, Gayathri Chandrasekaran,
1426 IEEE TRANSACTIONS ON MOBILE COMPUTING, VOL. 11, NO. 9, SEPTEMBER 2012 Sensing Driver Phone Use with Acoustic Ranging through Car Speakers Jie Yang, Student Member, IEEE, Simon Sidhom, Gayathri Chandrasekaran,
arxiv: v1 [cs.ni] 6 Jul 2013
![arxiv: v1 [cs.ni] 6 Jul 2013](/thumbs/77/75221141.jpg "arxiv: v1 [cs.ni] 6 Jul 2013") TEXIVE: Detecting Drivers Using Personal Smart Phones by Leveraging Inertial Sensors Cheng Bo, Xuesi Jian, Xiang-Yang Li Department of Computer Science, Illinois Institute of Technology, Chicago IL Email:
TEXIVE: Detecting Drivers Using Personal Smart Phones by Leveraging Inertial Sensors Cheng Bo, Xuesi Jian, Xiang-Yang Li Department of Computer Science, Illinois Institute of Technology, Chicago IL Email:
Directional Driver Hazard Advisory System. Benjamin Moore and Vasil Pendavinji ECE 445 Project Proposal Spring 2017 Team: 24 TA: Yuchen He
 Directional Driver Hazard Advisory System Benjamin Moore and Vasil Pendavinji ECE 445 Project Proposal Spring 2017 Team: 24 TA: Yuchen He 1 Table of Contents 1 Introduction... 3 1.1 Objective... 3 1.2
Directional Driver Hazard Advisory System Benjamin Moore and Vasil Pendavinji ECE 445 Project Proposal Spring 2017 Team: 24 TA: Yuchen He 1 Table of Contents 1 Introduction... 3 1.1 Objective... 3 1.2
NEOLINE. X-COP 9100s. International Hybrid device DVR with GPS & Radar detector
 NEOLINE X-COP 9100s International Hybrid device DVR with GPS & Radar detector NEOLINE X-COP 9100s Neoline X-COP 9100s is the world s first hybrid with an unique international radar platform for detection
NEOLINE X-COP 9100s International Hybrid device DVR with GPS & Radar detector NEOLINE X-COP 9100s Neoline X-COP 9100s is the world s first hybrid with an unique international radar platform for detection
Integrated Driving Aware System in the Real-World: Sensing, Computing and Feedback
 Integrated Driving Aware System in the Real-World: Sensing, Computing and Feedback Jung Wook Park HCI Institute Carnegie Mellon University 5000 Forbes Avenue Pittsburgh, PA, USA, 15213 jungwoop@andrew.cmu.edu
Integrated Driving Aware System in the Real-World: Sensing, Computing and Feedback Jung Wook Park HCI Institute Carnegie Mellon University 5000 Forbes Avenue Pittsburgh, PA, USA, 15213 jungwoop@andrew.cmu.edu
Bluetooth Low Energy Sensing Technology for Proximity Construction Applications
 Bluetooth Low Energy Sensing Technology for Proximity Construction Applications JeeWoong Park School of Civil and Environmental Engineering, Georgia Institute of Technology, 790 Atlantic Dr. N.W., Atlanta,
Bluetooth Low Energy Sensing Technology for Proximity Construction Applications JeeWoong Park School of Civil and Environmental Engineering, Georgia Institute of Technology, 790 Atlantic Dr. N.W., Atlanta,
SAfety VEhicles using adaptive Interface Technology (SAVE-IT): A Program Overview
: A Program Overview") SAfety VEhicles using adaptive Interface Technology (SAVE-IT): A Program Overview SAVE-IT David W. Eby,, PhD University of Michigan Transportation Research Institute International Distracted Driving Conference
SAfety VEhicles using adaptive Interface Technology (SAVE-IT): A Program Overview SAVE-IT David W. Eby,, PhD University of Michigan Transportation Research Institute International Distracted Driving Conference
Evaluation of Connected Vehicle Technology for Concept Proposal Using V2X Testbed
 AUTOMOTIVE Evaluation of Connected Vehicle Technology for Concept Proposal Using V2X Testbed Yoshiaki HAYASHI*, Izumi MEMEZAWA, Takuji KANTOU, Shingo OHASHI, and Koichi TAKAYAMA ----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
AUTOMOTIVE Evaluation of Connected Vehicle Technology for Concept Proposal Using V2X Testbed Yoshiaki HAYASHI*, Izumi MEMEZAWA, Takuji KANTOU, Shingo OHASHI, and Koichi TAKAYAMA ----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
MARVEL (Multiple Antenna based Relative Vehicle Localizer)
") MARVEL: Multiple Antenna based Relative Vehicle Localizer Dong Li, Tarun Bansal, Zhixue Lu and Prasun Sinha Department of Computer Science and Engineering The Ohio State University Columbus, OH 43210 {lido,
MARVEL: Multiple Antenna based Relative Vehicle Localizer Dong Li, Tarun Bansal, Zhixue Lu and Prasun Sinha Department of Computer Science and Engineering The Ohio State University Columbus, OH 43210 {lido,
Sensor Fusion for Navigation in Degraded Environements
 Sensor Fusion for Navigation in Degraded Environements David M. Bevly Professor Director of the GPS and Vehicle Dynamics Lab dmbevly@eng.auburn.edu (334) 844-3446 GPS and Vehicle Dynamics Lab Auburn University
Sensor Fusion for Navigation in Degraded Environements David M. Bevly Professor Director of the GPS and Vehicle Dynamics Lab dmbevly@eng.auburn.edu (334) 844-3446 GPS and Vehicle Dynamics Lab Auburn University
An Architecture for Intelligent Automotive Collision Avoidance Systems
 IVSS-2003-UMS-07 An Architecture for Intelligent Automotive Collision Avoidance Systems Syed Masud Mahmud and Shobhit Shanker Department of Electrical and Computer Engineering, Wayne State University,
IVSS-2003-UMS-07 An Architecture for Intelligent Automotive Collision Avoidance Systems Syed Masud Mahmud and Shobhit Shanker Department of Electrical and Computer Engineering, Wayne State University,
Indoor navigation with smartphones
 Indoor navigation with smartphones REinEU2016 Conference September 22 2016 PAVEL DAVIDSON Outline Indoor navigation system for smartphone: goals and requirements WiFi based positioning Application of BLE
Indoor navigation with smartphones REinEU2016 Conference September 22 2016 PAVEL DAVIDSON Outline Indoor navigation system for smartphone: goals and requirements WiFi based positioning Application of BLE
Raising Awareness of Emergency Vehicles in Traffic Using Connected Vehicle Technologies
 Raising Awareness of Emergency Vehicles in Traffic Using Connected Vehicle Technologies Larry Head University of Arizona September 23, 2017 1 Connected Vehicles DSRC 5.9 GHz Wireless Basic Safety Message
Raising Awareness of Emergency Vehicles in Traffic Using Connected Vehicle Technologies Larry Head University of Arizona September 23, 2017 1 Connected Vehicles DSRC 5.9 GHz Wireless Basic Safety Message
The Jigsaw Continuous Sensing Engine for Mobile Phone Applications!
 The Jigsaw Continuous Sensing Engine for Mobile Phone Applications! Hong Lu, Jun Yang, Zhigang Liu, Nicholas D. Lane, Tanzeem Choudhury, Andrew T. Campbell" CS Department Dartmouth College Nokia Research
The Jigsaw Continuous Sensing Engine for Mobile Phone Applications! Hong Lu, Jun Yang, Zhigang Liu, Nicholas D. Lane, Tanzeem Choudhury, Andrew T. Campbell" CS Department Dartmouth College Nokia Research
Speech Intelligibility Enhancement using Microphone Array via Intra-Vehicular Beamforming
 Speech Intelligibility Enhancement using Microphone Array via Intra-Vehicular Beamforming Devin McDonald, Joe Mesnard Advisors: Dr. In Soo Ahn & Dr. Yufeng Lu November 9 th, 2017 Table of Contents Introduction...2
Speech Intelligibility Enhancement using Microphone Array via Intra-Vehicular Beamforming Devin McDonald, Joe Mesnard Advisors: Dr. In Soo Ahn & Dr. Yufeng Lu November 9 th, 2017 Table of Contents Introduction...2
IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 67, NO. 3, MARCH
 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 67, NO. 3, MARCH 2018 1909 Towards Robust Vehicular Context Sensing Hang Qiu, Jinzhu Chen, Shubham Jain, Yurong Jiang, Matt McCartney,GorkemKar,FanBai, Fellow,
IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 67, NO. 3, MARCH 2018 1909 Towards Robust Vehicular Context Sensing Hang Qiu, Jinzhu Chen, Shubham Jain, Yurong Jiang, Matt McCartney,GorkemKar,FanBai, Fellow,
Traffic Management for Smart Cities TNK115 SMART CITIES
 Traffic Management for Smart Cities TNK115 SMART CITIES DAVID GUNDLEGÅRD DIVISION OF COMMUNICATION AND TRANSPORT SYSTEMS Outline Introduction Traffic sensors Traffic models Frameworks Information VS Control
Traffic Management for Smart Cities TNK115 SMART CITIES DAVID GUNDLEGÅRD DIVISION OF COMMUNICATION AND TRANSPORT SYSTEMS Outline Introduction Traffic sensors Traffic models Frameworks Information VS Control
Communication Networks. Braunschweiger Verkehrskolloquium
 Simulation of Car-to-X Communication Networks Braunschweiger Verkehrskolloquium DLR, 03.02.2011 02 2011 Henrik Schumacher, IKT Introduction VANET = Vehicular Ad hoc NETwork Originally used to emphasize
Simulation of Car-to-X Communication Networks Braunschweiger Verkehrskolloquium DLR, 03.02.2011 02 2011 Henrik Schumacher, IKT Introduction VANET = Vehicular Ad hoc NETwork Originally used to emphasize
Cooperative localization (part I) Jouni Rantakokko
 Jouni Rantakokko") Cooperative localization (part I) Jouni Rantakokko Cooperative applications / approaches Wireless sensor networks Robotics Pedestrian localization First responders Localization sensors - Small, low-cost
Cooperative localization (part I) Jouni Rantakokko Cooperative applications / approaches Wireless sensor networks Robotics Pedestrian localization First responders Localization sensors - Small, low-cost
Definition, Effects and Nature of Distracted Driving Worksheet 9.1
 Definition, Effects and Nature of Distracted Driving Worksheet 9.1 Am I Distracted? Self-Assessment Quiz Take this quiz from the National Road Safety Foundation to determine if you or someone you know
Definition, Effects and Nature of Distracted Driving Worksheet 9.1 Am I Distracted? Self-Assessment Quiz Take this quiz from the National Road Safety Foundation to determine if you or someone you know
Robust Positioning for Urban Traffic
 Robust Positioning for Urban Traffic Motivations and Activity plan for the WG 4.1.4 Dr. Laura Ruotsalainen Research Manager, Department of Navigation and positioning Finnish Geospatial Research Institute
Robust Positioning for Urban Traffic Motivations and Activity plan for the WG 4.1.4 Dr. Laura Ruotsalainen Research Manager, Department of Navigation and positioning Finnish Geospatial Research Institute
Development of 24 GHz-band High Resolution Multi-Mode Radar
 Special Issue Automobile Electronics Development of 24 GHz-band High Resolution Multi-Mode Radar Daisuke Inoue*, Kei Takahashi*, Hiroyasu Yano*, Noritaka Murofushi*, Sadao Matsushima*, Takashi Iijima*
Special Issue Automobile Electronics Development of 24 GHz-band High Resolution Multi-Mode Radar Daisuke Inoue*, Kei Takahashi*, Hiroyasu Yano*, Noritaka Murofushi*, Sadao Matsushima*, Takashi Iijima*
Intelligent Transport Systems and GNSS. ITSNT 2017 ENAC, Toulouse, France 11/ Nobuaki Kubo (TUMSAT)
") Intelligent Transport Systems and GNSS ITSNT 2017 ENAC, Toulouse, France 11/14-17 2017 Nobuaki Kubo (TUMSAT) Contents ITS applications in Japan How can GNSS contribute to ITS? Current performance of GNSS
Intelligent Transport Systems and GNSS ITSNT 2017 ENAC, Toulouse, France 11/14-17 2017 Nobuaki Kubo (TUMSAT) Contents ITS applications in Japan How can GNSS contribute to ITS? Current performance of GNSS
CONNECTED VEHICLE-TO-INFRASTRUCTURE INITATIVES
 CONNECTED VEHICLE-TO-INFRASTRUCTURE INITATIVES Arizona ITE March 3, 2016 Faisal Saleem ITS Branch Manager & MCDOT SMARTDrive Program Manager Maricopa County Department of Transportation ONE SYSTEM MULTIPLE
CONNECTED VEHICLE-TO-INFRASTRUCTURE INITATIVES Arizona ITE March 3, 2016 Faisal Saleem ITS Branch Manager & MCDOT SMARTDrive Program Manager Maricopa County Department of Transportation ONE SYSTEM MULTIPLE
COMPACT GUIDE. Camera-Integrated Motion Analysis
 EN 06/13 COMPACT GUIDE Camera-Integrated Motion Analysis Detect the movement of people and objects Filter according to directions of movement Fast, simple configuration Reliable results, even in the event
EN 06/13 COMPACT GUIDE Camera-Integrated Motion Analysis Detect the movement of people and objects Filter according to directions of movement Fast, simple configuration Reliable results, even in the event
Getting Through the Green: Smarter Traffic Management with Adaptive Signal Control
 Getting Through the Green: Smarter Traffic Management with Adaptive Signal Control Presented by: C. William (Bill) Kingsland, Assistant Commissioner, Transportation Systems Management Outline 1. What is
Getting Through the Green: Smarter Traffic Management with Adaptive Signal Control Presented by: C. William (Bill) Kingsland, Assistant Commissioner, Transportation Systems Management Outline 1. What is
PEDESTRIAN AND OBJECT DETECTION SYSTEM IN VEHICLES FOR SAFETY DRIVING
 PEDESTRIAN AND OBJECT DETECTION SYSTEM IN VEHICLES FOR SAFETY DRIVING J. Ram Prabu and S. Abinaya Department of EEE, Kumaraguru College of Technology, Coimbatore, India ABSTRACT In this paper a new image
PEDESTRIAN AND OBJECT DETECTION SYSTEM IN VEHICLES FOR SAFETY DRIVING J. Ram Prabu and S. Abinaya Department of EEE, Kumaraguru College of Technology, Coimbatore, India ABSTRACT In this paper a new image
interactive IP: Perception platform and modules
 interactive IP: Perception platform and modules Angelos Amditis, ICCS 19 th ITS-WC-SIS76: Advanced integrated safety applications based on enhanced perception, active interventions and new advanced sensors
interactive IP: Perception platform and modules Angelos Amditis, ICCS 19 th ITS-WC-SIS76: Advanced integrated safety applications based on enhanced perception, active interventions and new advanced sensors
MODULE 10: INTELLIGENT TRANSPORTATION SYSTEMS: SMART WORK ZONES LESSON 1: WORK ZONE SAFETY
 MODULE 10: INTELLIGENT TRANSPORTATION SYSTEMS: SMART WORK ZONES LESSON 1: WORK ZONE SAFETY Connected vehicle (CV) safety applications are designed to increase awareness of what is happening in the environment
MODULE 10: INTELLIGENT TRANSPORTATION SYSTEMS: SMART WORK ZONES LESSON 1: WORK ZONE SAFETY Connected vehicle (CV) safety applications are designed to increase awareness of what is happening in the environment
THE SCHOOL BUS. Figure 1
 THE SCHOOL BUS Federal Motor Vehicle Safety Standards (FMVSS) 571.111 Standard 111 provides the requirements for rear view mirror systems for road vehicles, including the school bus in the US. The Standards
THE SCHOOL BUS Federal Motor Vehicle Safety Standards (FMVSS) 571.111 Standard 111 provides the requirements for rear view mirror systems for road vehicles, including the school bus in the US. The Standards
B O S E A N D C A B I N S O U N D M A N A G E M E N T. John Pelliccio Head of Product Communications Bose Automotive Systems Stow, Massachusetts
 B O S E A N D C A B I N S O U N D M A N A G E M E N T John Pelliccio Head of Product Communications Bose Automotive Systems Stow, Massachusetts Who we are, and what we do Bose was obsessed with quality
B O S E A N D C A B I N S O U N D M A N A G E M E N T John Pelliccio Head of Product Communications Bose Automotive Systems Stow, Massachusetts Who we are, and what we do Bose was obsessed with quality
RECOMMENDATION ITU-R M.1310* TRANSPORT INFORMATION AND CONTROL SYSTEMS (TICS) OBJECTIVES AND REQUIREMENTS (Question ITU-R 205/8)
 OBJECTIVES AND REQUIREMENTS (Question ITU-R 205/8)") Rec. ITU-R M.1310 1 RECOMMENDATION ITU-R M.1310* TRANSPORT INFORMATION AND CONTROL SYSTEMS (TICS) OBJECTIVES AND REQUIREMENTS (Question ITU-R 205/8) Rec. ITU-R M.1310 (1997) Summary This Recommendation
Rec. ITU-R M.1310 1 RECOMMENDATION ITU-R M.1310* TRANSPORT INFORMATION AND CONTROL SYSTEMS (TICS) OBJECTIVES AND REQUIREMENTS (Question ITU-R 205/8) Rec. ITU-R M.1310 (1997) Summary This Recommendation
Comparison of Simulation-Based Dynamic Traffic Assignment Approaches for Planning and Operations Management
 Comparison of Simulation-Based Dynamic Traffic Assignment Approaches for Planning and Operations Management Ramachandran Balakrishna Daniel Morgan Qi Yang Howard Slavin Caliper Corporation 4 th TRB Conference
Comparison of Simulation-Based Dynamic Traffic Assignment Approaches for Planning and Operations Management Ramachandran Balakrishna Daniel Morgan Qi Yang Howard Slavin Caliper Corporation 4 th TRB Conference
Transportation Behavior Sensing using Smartphones
 Transportation Behavior Sensing using Smartphones Samuli Hemminki Helsinki Institute for Information Technology HIIT, University of Helsinki samuli.hemminki@cs.helsinki.fi Abstract Inferring context information
Transportation Behavior Sensing using Smartphones Samuli Hemminki Helsinki Institute for Information Technology HIIT, University of Helsinki samuli.hemminki@cs.helsinki.fi Abstract Inferring context information
Minimizing Distraction While Adding Features
 Minimizing Distraction While Adding Features Lisa Southwick, UX Manager Hyundai American Technical Center, Inc. Agenda Distracted Driving Advanced Driver Assistance Systems (ADAS) ADAS User Experience
Minimizing Distraction While Adding Features Lisa Southwick, UX Manager Hyundai American Technical Center, Inc. Agenda Distracted Driving Advanced Driver Assistance Systems (ADAS) ADAS User Experience
Perception. Read: AIMA Chapter 24 & Chapter HW#8 due today. Vision
 11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
Cooperative navigation (part II)
") Cooperative navigation (part II) An example using foot-mounted INS and UWB-transceivers Jouni Rantakokko Aim Increased accuracy during long-term operations in GNSS-challenged environments for - First responders
Cooperative navigation (part II) An example using foot-mounted INS and UWB-transceivers Jouni Rantakokko Aim Increased accuracy during long-term operations in GNSS-challenged environments for - First responders
INDOOR localization is a critical enabler for location based
 IEEE TRANSACTIONS ON MOBILE COMPUTING, VOL. 13, NO. 10, OCTOBER 2014 2199 Accurate WiFi Based Localization for Smartphones Using Peer Assistance Hongbo Liu, Member, IEEE, Jie Yang, Member, IEEE, Simon
IEEE TRANSACTIONS ON MOBILE COMPUTING, VOL. 13, NO. 10, OCTOBER 2014 2199 Accurate WiFi Based Localization for Smartphones Using Peer Assistance Hongbo Liu, Member, IEEE, Jie Yang, Member, IEEE, Simon
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS. Sergii Bykov Technical Lead Machine Learning 12 Oct 2017
 23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
Roadside Range Sensors for Intersection Decision Support
 Roadside Range Sensors for Intersection Decision Support Arvind Menon, Alec Gorjestani, Craig Shankwitz and Max Donath, Member, IEEE Abstract The Intelligent Transportation Institute at the University
Roadside Range Sensors for Intersection Decision Support Arvind Menon, Alec Gorjestani, Craig Shankwitz and Max Donath, Member, IEEE Abstract The Intelligent Transportation Institute at the University
Improving Work Zone Safety Utilizing a New Mobile Proximity Sensing Technology
 www.cpwr.com www.elcosh.org Improving Work Zone Safety Utilizing a New Mobile Proximity Sensing Technology Yong Kwon Cho Xiaoyu Yang Jeewoong Park Georgia Institute of Technology School of Civil and Environmental
www.cpwr.com www.elcosh.org Improving Work Zone Safety Utilizing a New Mobile Proximity Sensing Technology Yong Kwon Cho Xiaoyu Yang Jeewoong Park Georgia Institute of Technology School of Civil and Environmental
IoT Wi-Fi- based Indoor Positioning System Using Smartphones
 IoT Wi-Fi- based Indoor Positioning System Using Smartphones Author: Suyash Gupta Abstract The demand for Indoor Location Based Services (LBS) is increasing over the past years as smartphone market expands.
IoT Wi-Fi- based Indoor Positioning System Using Smartphones Author: Suyash Gupta Abstract The demand for Indoor Location Based Services (LBS) is increasing over the past years as smartphone market expands.
Mobility-as-a-Service and its effect on Toll Facilities
 Mobility-as-a-Service and its effect on Toll Facilities Sooner or Later? By Rick Gobeille Senior Principal, Stantec Haley Collins Transportation Planner, Stantec Outline of Presentation Toll Facility Forecasting
Mobility-as-a-Service and its effect on Toll Facilities Sooner or Later? By Rick Gobeille Senior Principal, Stantec Haley Collins Transportation Planner, Stantec Outline of Presentation Toll Facility Forecasting
Sponsored by. Nisarg Kothari Carnegie Mellon University April 26, 2011
 Sponsored by Nisarg Kothari Carnegie Mellon University April 26, 2011 Motivation Why indoor localization? Navigating malls, airports, office buildings Museum tours, context aware apps Augmented reality
Sponsored by Nisarg Kothari Carnegie Mellon University April 26, 2011 Motivation Why indoor localization? Navigating malls, airports, office buildings Museum tours, context aware apps Augmented reality
Mobile Crowd Sensing-based Noise Monitoring as a Way to Improve Learning quality on Acoustics
 Mobile Crowd Sensing-based Noise Monitoring as a Way to Improve Learning quality on Acoustics Salonicco, 19,11.15 Marco Zappatore Antonella Longo, Mario A. Bochicchio Daniele Zappatore Alessandro A. Morrone
Mobile Crowd Sensing-based Noise Monitoring as a Way to Improve Learning quality on Acoustics Salonicco, 19,11.15 Marco Zappatore Antonella Longo, Mario A. Bochicchio Daniele Zappatore Alessandro A. Morrone
Research in Advanced Performance Technology and Educational Readiness
 Research in Advanced Performance Technology and Educational Readiness Enhancing Human Performance with the Right Technology Ronald W. Tarr Program Director RAPTER-IST University of Central Florida 1 Mission
Research in Advanced Performance Technology and Educational Readiness Enhancing Human Performance with the Right Technology Ronald W. Tarr Program Director RAPTER-IST University of Central Florida 1 Mission
Positioning Challenges in Cooperative Vehicular Safety Systems
 Positioning Challenges in Cooperative Vehicular Safety Systems Dr. Luca Delgrossi Mercedes-Benz Research & Development North America, Inc. October 15, 2009 Positioning for Automotive Navigation Personal
Positioning Challenges in Cooperative Vehicular Safety Systems Dr. Luca Delgrossi Mercedes-Benz Research & Development North America, Inc. October 15, 2009 Positioning for Automotive Navigation Personal
GNSS RFI/Spoofing: Detection, Localization, & Mitigation
 GNSS RFI/Spoofing: Detection, Localization, & Mitigation Stanford's 2012 PNT Challenges and Opportunities Symposium 14 - November - 2012 Dennis M. Akos University of Colorado/Stanford University with contributions
GNSS RFI/Spoofing: Detection, Localization, & Mitigation Stanford's 2012 PNT Challenges and Opportunities Symposium 14 - November - 2012 Dennis M. Akos University of Colorado/Stanford University with contributions
COST Action: TU1302 Action Title: Satellite Positioning Performance Assessment for Road Transport SaPPART. STSM Scientific Report
 COST Action: TU1302 Action Title: Satellite Positioning Performance Assessment for Road Transport SaPPART STSM Scientific Report Assessing the performances of Hybrid positioning system COST STSM Reference
COST Action: TU1302 Action Title: Satellite Positioning Performance Assessment for Road Transport SaPPART STSM Scientific Report Assessing the performances of Hybrid positioning system COST STSM Reference
COST OF TRAFFIC US alone wasted about 3 billion gallons of fuel thanks to traffic in 2014, America blew through $160 billion in wasted time and fuel
 COST OF TRAFFIC US alone wasted about 3 billion gallons of fuel thanks to traffic in 2014, America blew through $160 billion in wasted time and fuel last year -- an average cost of $960 per typical motorist,
COST OF TRAFFIC US alone wasted about 3 billion gallons of fuel thanks to traffic in 2014, America blew through $160 billion in wasted time and fuel last year -- an average cost of $960 per typical motorist,
NAVIGATION. Basic Navigation Operation. Learn how to enter a destination and operate the navigation system.
 Learn how to enter a destination and operate the navigation system. Basic Navigation Operation A real-time navigation system uses GPS and a map database to show your current location and help guide you
Learn how to enter a destination and operate the navigation system. Basic Navigation Operation A real-time navigation system uses GPS and a map database to show your current location and help guide you
ITS Radiocommunications in Japan Progress report and future directions
 ITS Radiocommunications in Japan Progress report and future directions 6 March 2018 Berlin, Germany Tomoaki Ishii Assistant Director, New-Generation Mobile Communications Office, Radio Dept., Telecommunications
ITS Radiocommunications in Japan Progress report and future directions 6 March 2018 Berlin, Germany Tomoaki Ishii Assistant Director, New-Generation Mobile Communications Office, Radio Dept., Telecommunications
Deep Learning for Human Activity Recognition: A Resource Efficient Implementation on Low-Power Devices
 Deep Learning for Human Activity Recognition: A Resource Efficient Implementation on Low-Power Devices Daniele Ravì, Charence Wong, Benny Lo and Guang-Zhong Yang To appear in the proceedings of the IEEE
Deep Learning for Human Activity Recognition: A Resource Efficient Implementation on Low-Power Devices Daniele Ravì, Charence Wong, Benny Lo and Guang-Zhong Yang To appear in the proceedings of the IEEE
Development of Gaze Detection Technology toward Driver's State Estimation
 Development of Gaze Detection Technology toward Driver's State Estimation Naoyuki OKADA Akira SUGIE Itsuki HAMAUE Minoru FUJIOKA Susumu YAMAMOTO Abstract In recent years, the development of advanced safety
Development of Gaze Detection Technology toward Driver's State Estimation Naoyuki OKADA Akira SUGIE Itsuki HAMAUE Minoru FUJIOKA Susumu YAMAMOTO Abstract In recent years, the development of advanced safety
Model Deployment Overview. Debby Bezzina Senior Program Manager University of Michigan Transportation Research Institute
 Model Deployment Overview Debby Bezzina Senior Program Manager University of Michigan Transportation Research Institute Test Conductor Team 2 3 Connected Vehicle Technology 4 Safety Pilot Model Deployment
Model Deployment Overview Debby Bezzina Senior Program Manager University of Michigan Transportation Research Institute Test Conductor Team 2 3 Connected Vehicle Technology 4 Safety Pilot Model Deployment
Driver Education Classroom and In-Car Curriculum Unit 3 Space Management System
 Driver Education Classroom and In-Car Curriculum Unit 3 Space Management System Driver Education Classroom and In-Car Instruction Unit 3-2 Unit Introduction Unit 3 will introduce operator procedural and
Driver Education Classroom and In-Car Curriculum Unit 3 Space Management System Driver Education Classroom and In-Car Instruction Unit 3-2 Unit Introduction Unit 3 will introduce operator procedural and
Wireless Black Box Using MEMs Accelerometer And GPS Tracking For Accidental Monitoring Of Vehicles
 Wireless Black Box Using MEMs Accelerometer And GPS Tracking For Accidental Monitoring Of Vehicles Abinaya.V, Dhana sekar.a, Hari prasaath.r, Kavitha.R, Dinesh kumar.m Department of ECE, Knowledge Institute
Wireless Black Box Using MEMs Accelerometer And GPS Tracking For Accidental Monitoring Of Vehicles Abinaya.V, Dhana sekar.a, Hari prasaath.r, Kavitha.R, Dinesh kumar.m Department of ECE, Knowledge Institute
ACCIDENT PREVENTION IN VEHICLE WITH EFECTIVE RESCUE OPERATION
 ISSN: 0976-3104 SPECIAL ISSUE : Emerging Technologies in Networking and Security (ETNS). ARTICLE OPEN ACCESS ACCIDENT PREVENTION IN VEHICLE WITH EFECTIVE RESCUE OPERATION K. Karthick 1, T. Praveen 2, R.
ISSN: 0976-3104 SPECIAL ISSUE : Emerging Technologies in Networking and Security (ETNS). ARTICLE OPEN ACCESS ACCIDENT PREVENTION IN VEHICLE WITH EFECTIVE RESCUE OPERATION K. Karthick 1, T. Praveen 2, R.
LiTell: Robust Indoor Localization Using Unmodified Light Fixtures
 LiTell: Robust Indoor Localization Using Unmodified Light Fixtures Chi Zhang, Xinyu Zhang Department of Electrical and Computer Engineering University of Wisconsin-Madison MobiCom'16 Indoor Localization:
LiTell: Robust Indoor Localization Using Unmodified Light Fixtures Chi Zhang, Xinyu Zhang Department of Electrical and Computer Engineering University of Wisconsin-Madison MobiCom'16 Indoor Localization:
Naturalistic Flying Study as a Method of Collecting Pilot Communication Behavior Data
 IEEE Cognitive Communications for Aerospace Applications Workshop 2017 Naturalistic Flying Study as a Method of Collecting Pilot Communication Behavior Data Chang-Geun Oh, Ph.D Kent State University Why
IEEE Cognitive Communications for Aerospace Applications Workshop 2017 Naturalistic Flying Study as a Method of Collecting Pilot Communication Behavior Data Chang-Geun Oh, Ph.D Kent State University Why
Honda R&D Americas, Inc.
 Honda R&D Americas, Inc. Topics Honda s view on ITS and V2X Activity Honda-lead V2I Message Set Development Status Challenges Topics Honda s view on ITS and V2X Activity Honda-lead V2I Message Set Standard
Honda R&D Americas, Inc. Topics Honda s view on ITS and V2X Activity Honda-lead V2I Message Set Development Status Challenges Topics Honda s view on ITS and V2X Activity Honda-lead V2I Message Set Standard
SA-034/18 - MAZDA CONNECT SYSTEM FREQUENTLY ASKED QUESTIONS (FAQ)
") SA-034/18 - MAZDA CONNECT SYSTEM FREQUENTLY ASKED QUESTIONS (FAQ) SI118065 SA NUMBER: SA-034/18 BULLETIN NOTES APPLICABLE MODEL(S)/VINS 2014-2018 Mazda3 2016-2018 Mazda6 2016-2019 CX-3 2016-2018 CX-5 2016-2018
SA-034/18 - MAZDA CONNECT SYSTEM FREQUENTLY ASKED QUESTIONS (FAQ) SI118065 SA NUMBER: SA-034/18 BULLETIN NOTES APPLICABLE MODEL(S)/VINS 2014-2018 Mazda3 2016-2018 Mazda6 2016-2019 CX-3 2016-2018 CX-5 2016-2018
Detecting Intra-Room Mobility with Signal Strength Descriptors
 Detecting Intra-Room Mobility with Signal Strength Descriptors Authors: Konstantinos Kleisouris Bernhard Firner Richard Howard Yanyong Zhang Richard Martin WINLAB Background: Internet of Things (Iot) Attaching
Detecting Intra-Room Mobility with Signal Strength Descriptors Authors: Konstantinos Kleisouris Bernhard Firner Richard Howard Yanyong Zhang Richard Martin WINLAB Background: Internet of Things (Iot) Attaching
Hardware-free Indoor Navigation for Smartphones
 Hardware-free Indoor Navigation for Smartphones 1 Navigation product line 1996-2015 1996 1998 RTK OTF solution with accuracy 1 cm 8-channel software GPS receiver 2004 2007 Program prototype of Super-sensitive
Hardware-free Indoor Navigation for Smartphones 1 Navigation product line 1996-2015 1996 1998 RTK OTF solution with accuracy 1 cm 8-channel software GPS receiver 2004 2007 Program prototype of Super-sensitive
Acoustic Based Angle-Of-Arrival Estimation in the Presence of Interference
 Acoustic Based Angle-Of-Arrival Estimation in the Presence of Interference Abstract Before radar systems gained widespread use, passive sound-detection based systems were employed in Great Britain to detect
Acoustic Based Angle-Of-Arrival Estimation in the Presence of Interference Abstract Before radar systems gained widespread use, passive sound-detection based systems were employed in Great Britain to detect
Design of an Instrumented Vehicle Test Bed for Developing a Human Centered Driver Support System
 Design of an Instrumented Vehicle Test Bed for Developing a Human Centered Driver Support System Joel C. McCall, Ofer Achler, Mohan M. Trivedi jmccall@ucsd.edu, oachler@ucsd.edu, mtrivedi@ucsd.edu Computer
Design of an Instrumented Vehicle Test Bed for Developing a Human Centered Driver Support System Joel C. McCall, Ofer Achler, Mohan M. Trivedi jmccall@ucsd.edu, oachler@ucsd.edu, mtrivedi@ucsd.edu Computer
IVHW : an Inter-Vehicle Hazard Warning system
 : an Inter-Vehicle Hazard Warning system Benoît MAÏSSEU Project characteristics : a two years DEUFRAKO project - France/Germany co-operation (2001-2002) Partners: RENAULT, COFIROUTE, ESTAR, INRETS, ISIS,
: an Inter-Vehicle Hazard Warning system Benoît MAÏSSEU Project characteristics : a two years DEUFRAKO project - France/Germany co-operation (2001-2002) Partners: RENAULT, COFIROUTE, ESTAR, INRETS, ISIS,
2013 ADVANCED TECHNOLOGY GUIDE
 o w n e r s. a c u r a. c o m 3 1 S Z N Q 3 0 2 0 1 3 A c u r a Z D X A d v a n c e d T e c h n o l o g y G u i d e 0 0 X 3 1 - S Z N - Q 3 0 0 2 0 1 2 H o n d a M o t o r C o., L t d. A l l R i g h t
o w n e r s. a c u r a. c o m 3 1 S Z N Q 3 0 2 0 1 3 A c u r a Z D X A d v a n c e d T e c h n o l o g y G u i d e 0 0 X 3 1 - S Z N - Q 3 0 0 2 0 1 2 H o n d a M o t o r C o., L t d. A l l R i g h t
SPEEDBOX Technical Datasheet
 SPEEDBOX Technical Datasheet Race Technology Limited, 2008 Version 1.1 1. Introduction... 3 1.1. Product Overview... 3 1.2. Applications... 3 1.3. Standard Features... 3 2. Port / Connector details...
SPEEDBOX Technical Datasheet Race Technology Limited, 2008 Version 1.1 1. Introduction... 3 1.1. Product Overview... 3 1.2. Applications... 3 1.3. Standard Features... 3 2. Port / Connector details...
and Vehicle Sensors in Urban Environment
 AvailabilityImprovement ofrtk GPS GPSwithIMU and Vehicle Sensors in Urban Environment ION GPS/GNSS 2012 Tk Tokyo University it of Marine Si Science and Technology Nobuaki Kubo, Chen Dihan 1 Contents Background
AvailabilityImprovement ofrtk GPS GPSwithIMU and Vehicle Sensors in Urban Environment ION GPS/GNSS 2012 Tk Tokyo University it of Marine Si Science and Technology Nobuaki Kubo, Chen Dihan 1 Contents Background
Introducing LISA. LISA: Laboratory for Intelligent and Safe Automobiles
 Introducing LISA LISA: Laboratory for Intelligent and Safe Automobiles Mohan M. Trivedi University of California at San Diego mtrivedi@ucsd.edu Int. Workshop on Progress and Future Directions of Adaptive
Introducing LISA LISA: Laboratory for Intelligent and Safe Automobiles Mohan M. Trivedi University of California at San Diego mtrivedi@ucsd.edu Int. Workshop on Progress and Future Directions of Adaptive
Automotive 77GHz; Coupled 3D-EM / Asymptotic Simulations. Franz Hirtenfelder CST /AG
 Automotive Radar @ 77GHz; Coupled 3D-EM / Asymptotic Simulations Franz Hirtenfelder CST /AG Abstract Active safety systems play a major role in reducing traffic fatalities, including adaptive cruise control,
Automotive Radar @ 77GHz; Coupled 3D-EM / Asymptotic Simulations Franz Hirtenfelder CST /AG Abstract Active safety systems play a major role in reducing traffic fatalities, including adaptive cruise control,
AccelWord: Energy Efficient Hotword Detection through Accelerometer
 AccelWord: Energy Efficient Hotword Detection through Accelerometer Li Zhang, Parth H. Pathak, Muchen Wu, Yixin Zhao and Prasant Mohapatra Computer Science Department, University of California, Davis,
AccelWord: Energy Efficient Hotword Detection through Accelerometer Li Zhang, Parth H. Pathak, Muchen Wu, Yixin Zhao and Prasant Mohapatra Computer Science Department, University of California, Davis,
Stabilization of the Mobility in Free Traffic
 Indian Journal of Science and Technology, Vol 9(31), DOI: 10.17485/ijst/2016/v9i31/98122, August 2016 ISSN (Print) : 0974-6846 ISSN (Online) : 0974-5645 Stabilization of the Mobility in Free Traffic A.
Indian Journal of Science and Technology, Vol 9(31), DOI: 10.17485/ijst/2016/v9i31/98122, August 2016 ISSN (Print) : 0974-6846 ISSN (Online) : 0974-5645 Stabilization of the Mobility in Free Traffic A.
SONIC GUN TO SMART DEVICES YOUR DEVICES LOSE CONTROL UNDER ULTRASOUND/SOUND
 SONIC GUN TO SMART DEVICES YOUR DEVICES LOSE CONTROL UNDER ULTRASOUND/SOUND Authors Wang, Zhengbo & Wang, Kang Alibaba Security Yang, Bo CAICT Li, Shangyuan Tsinghua University Pan, Aimin Alibaba Security
SONIC GUN TO SMART DEVICES YOUR DEVICES LOSE CONTROL UNDER ULTRASOUND/SOUND Authors Wang, Zhengbo & Wang, Kang Alibaba Security Yang, Bo CAICT Li, Shangyuan Tsinghua University Pan, Aimin Alibaba Security
Senion IPS 101. An introduction to Indoor Positioning Systems
 Senion IPS 101 An introduction to Indoor Positioning Systems INTRODUCTION Indoor Positioning 101 What is Indoor Positioning Systems? 3 Where IPS is used 4 How does it work? 6 Diverse Radio Environments
Senion IPS 101 An introduction to Indoor Positioning Systems INTRODUCTION Indoor Positioning 101 What is Indoor Positioning Systems? 3 Where IPS is used 4 How does it work? 6 Diverse Radio Environments
Audio Output Devices for Head Mounted Display Devices
 Technical Disclosure Commons Defensive Publications Series February 16, 2018 Audio Output Devices for Head Mounted Display Devices Leonardo Kusumo Andrew Nartker Stephen Schooley Follow this and additional
Technical Disclosure Commons Defensive Publications Series February 16, 2018 Audio Output Devices for Head Mounted Display Devices Leonardo Kusumo Andrew Nartker Stephen Schooley Follow this and additional
Qosmotec. Software Solutions GmbH. Technical Overview. QPER C2X - Car-to-X Signal Strength Emulator and HiL Test Bench. Page 1
 Qosmotec Software Solutions GmbH Technical Overview QPER C2X - Page 1 TABLE OF CONTENTS 0 DOCUMENT CONTROL...3 0.1 Imprint...3 0.2 Document Description...3 1 SYSTEM DESCRIPTION...4 1.1 General Concept...4
Qosmotec Software Solutions GmbH Technical Overview QPER C2X - Page 1 TABLE OF CONTENTS 0 DOCUMENT CONTROL...3 0.1 Imprint...3 0.2 Document Description...3 1 SYSTEM DESCRIPTION...4 1.1 General Concept...4
THE risk of injury is reported to increase significantly
 IEEE TRANSACTIONS ON MOBILE COMPUTING, VOL. 17, NO. 6, JUNE 2018 1469 Use of Phone Sensors to Enhance Distracted Pedestrians Safety Yu-Chih Tung and Kang G. Shin, Life Fellow, IEEE Abstract Studies have
IEEE TRANSACTIONS ON MOBILE COMPUTING, VOL. 17, NO. 6, JUNE 2018 1469 Use of Phone Sensors to Enhance Distracted Pedestrians Safety Yu-Chih Tung and Kang G. Shin, Life Fellow, IEEE Abstract Studies have
Range Sensing strategies
 Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart and Nourbakhsh 4.1.6 Range Sensors (time of flight) (1) Large range distance measurement -> called
Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart and Nourbakhsh 4.1.6 Range Sensors (time of flight) (1) Large range distance measurement -> called
Galileo as an instrument of unification of the European railway transport
 Railway Infrastructure Administration Galileo as an instrument of unification of the European railway transport by Hynek Mocek SŽDC, TÚDC - Laboratory of Intelligent Systems Pardubice,, Czech Republic
Railway Infrastructure Administration Galileo as an instrument of unification of the European railway transport by Hynek Mocek SŽDC, TÚDC - Laboratory of Intelligent Systems Pardubice,, Czech Republic
Lab 2. Logistics & Travel. Installing all the packages. Makeup class Recorded class Class time to work on lab Remote class
 Lab 2 Installing all the packages Logistics & Travel Makeup class Recorded class Class time to work on lab Remote class Classification of Sensors Proprioceptive sensors internal to robot Exteroceptive
Lab 2 Installing all the packages Logistics & Travel Makeup class Recorded class Class time to work on lab Remote class Classification of Sensors Proprioceptive sensors internal to robot Exteroceptive
Indoor Location Detection
 Indoor Location Detection Arezou Pourmir Abstract: This project is a classification problem and tries to distinguish some specific places from each other. We use the acoustic waves sent from the speaker
Indoor Location Detection Arezou Pourmir Abstract: This project is a classification problem and tries to distinguish some specific places from each other. We use the acoustic waves sent from the speaker
Study of Effectiveness of Collision Avoidance Technology
 Study of Effectiveness of Collision Avoidance Technology How drivers react and feel when using aftermarket collision avoidance technologies Executive Summary Newer vehicles, including commercial vehicles,
Study of Effectiveness of Collision Avoidance Technology How drivers react and feel when using aftermarket collision avoidance technologies Executive Summary Newer vehicles, including commercial vehicles,
Falling Weight Deflectometer
 elastic pavements ltd Manufacturer of highly specialist equipment Falling Weight Deflectometer Model ASTEC-120-2013-9G The device is used to measure the vertical deflection response of a surface to an
elastic pavements ltd Manufacturer of highly specialist equipment Falling Weight Deflectometer Model ASTEC-120-2013-9G The device is used to measure the vertical deflection response of a surface to an
Virtual Homologation of Software- Intensive Safety Systems: From ESC to Automated Driving
 Virtual Homologation of Software- Intensive Safety Systems: From ESC to Automated Driving Dr. Houssem Abdellatif Global Head Autonomous Driving & ADAS TÜV SÜD Auto Service Christian Gnandt Lead Engineer
Virtual Homologation of Software- Intensive Safety Systems: From ESC to Automated Driving Dr. Houssem Abdellatif Global Head Autonomous Driving & ADAS TÜV SÜD Auto Service Christian Gnandt Lead Engineer
The SeMiFOT project and other Swedish FOT Activities
 The SeMiFOT project and other Swedish FOT Activities First name: Trent Last name: Victor SAFER 25/09/08, First Stakeholder Meeting, Brussels Outline 1. Background SAFER 2. Background FOT & NDS 3. SeMiFOT
The SeMiFOT project and other Swedish FOT Activities First name: Trent Last name: Victor SAFER 25/09/08, First Stakeholder Meeting, Brussels Outline 1. Background SAFER 2. Background FOT & NDS 3. SeMiFOT
Rocking Drones with Intentional Sound Noise on Gyroscopic Sensors
 USENIX Security Symposium 2015 Rocking Drones with Intentional Sound Noise on Gyroscopic Sensors 2015. 08. 14. Yunmok Son, Hocheol Shin, Dongkwan Kim, Youngseok Park, Juhwan Noh, Kibum Choi, Jungwoo Choi,
USENIX Security Symposium 2015 Rocking Drones with Intentional Sound Noise on Gyroscopic Sensors 2015. 08. 14. Yunmok Son, Hocheol Shin, Dongkwan Kim, Youngseok Park, Juhwan Noh, Kibum Choi, Jungwoo Choi,
ADAS Development using Advanced Real-Time All-in-the-Loop Simulators. Roberto De Vecchi VI-grade Enrico Busto - AddFor
 ADAS Development using Advanced Real-Time All-in-the-Loop Simulators Roberto De Vecchi VI-grade Enrico Busto - AddFor The Scenario The introduction of ADAS and AV has created completely new challenges
ADAS Development using Advanced Real-Time All-in-the-Loop Simulators Roberto De Vecchi VI-grade Enrico Busto - AddFor The Scenario The introduction of ADAS and AV has created completely new challenges
ON!Track smart tag AI T380. English. Printed: Doc-Nr: PUB / / 000 / 02
 ON!Track smart tag AI T380 English 1 Information about the documentation 1.1 About this documentation Read this documentation before initial operation or use. This is a prerequisite for safe, trouble-free
ON!Track smart tag AI T380 English 1 Information about the documentation 1.1 About this documentation Read this documentation before initial operation or use. This is a prerequisite for safe, trouble-free
Inter- and Intra-Vehicle Communications
 Inter- and Intra-Vehicle Communications Gilbert Held A Auerbach Publications Taylor 5* Francis Group Boca Raton New York Auerbach Publications is an imprint of the Taylor & Francis Croup, an informa business
Inter- and Intra-Vehicle Communications Gilbert Held A Auerbach Publications Taylor 5* Francis Group Boca Raton New York Auerbach Publications is an imprint of the Taylor & Francis Croup, an informa business
PRESENTED BY HUMANOID IIT KANPUR
 SENSORS & ACTUATORS Robotics Club (Science and Technology Council, IITK) PRESENTED BY HUMANOID IIT KANPUR October 11th, 2017 WHAT ARE WE GOING TO LEARN!! COMPARISON between Transducers Sensors And Actuators.
SENSORS & ACTUATORS Robotics Club (Science and Technology Council, IITK) PRESENTED BY HUMANOID IIT KANPUR October 11th, 2017 WHAT ARE WE GOING TO LEARN!! COMPARISON between Transducers Sensors And Actuators.
Research Article DrivingSense: Dangerous Driving Behavior Identification Based on Smartphone Autocalibration
 Hindawi Mobile Information Systems Volume 217, Article ID 975653, 15 pages https://doi.org/1.1155/217/975653 Research Article DrivingSense: Dangerous Driving Behavior Identification Based on Smartphone
Hindawi Mobile Information Systems Volume 217, Article ID 975653, 15 pages https://doi.org/1.1155/217/975653 Research Article DrivingSense: Dangerous Driving Behavior Identification Based on Smartphone
CLICK HERE TO KNOW MORE
 CLICK HERE TO KNOW MORE BUILDING SMART CITIES WITH SMART CITIZENS Dr. Mazlan Abbas CEO - REDtone IOT Sdn Bhd Email: mazlan.abbas@redtone.com GeoSmart Asia 2015, Malaysia PRESENTATION CONTENTS Smart City
CLICK HERE TO KNOW MORE BUILDING SMART CITIES WITH SMART CITIZENS Dr. Mazlan Abbas CEO - REDtone IOT Sdn Bhd Email: mazlan.abbas@redtone.com GeoSmart Asia 2015, Malaysia PRESENTATION CONTENTS Smart City
Intelligent Robotics Sensors and Actuators
 Intelligent Robotics Sensors and Actuators Luís Paulo Reis (University of Porto) Nuno Lau (University of Aveiro) The Perception Problem Do we need perception? Complexity Uncertainty Dynamic World Detection/Correction
Intelligent Robotics Sensors and Actuators Luís Paulo Reis (University of Porto) Nuno Lau (University of Aveiro) The Perception Problem Do we need perception? Complexity Uncertainty Dynamic World Detection/Correction
White paper on CAR150 millimeter wave radar
 White paper on CAR150 millimeter wave radar Hunan Nanoradar Science and Technology Co.,Ltd. Version history Date Version Version description 2017-02-23 1.0 The 1 st version of white paper on CAR150 Contents
White paper on CAR150 millimeter wave radar Hunan Nanoradar Science and Technology Co.,Ltd. Version history Date Version Version description 2017-02-23 1.0 The 1 st version of white paper on CAR150 Contents
White paper on CAR28T millimeter wave radar
 White paper on CAR28T millimeter wave radar Hunan Nanoradar Science and Technology Co., Ltd. Version history Date Version Version description 2017-07-13 1.0 the 1st version of white paper on CAR28T Contents
White paper on CAR28T millimeter wave radar Hunan Nanoradar Science and Technology Co., Ltd. Version history Date Version Version description 2017-07-13 1.0 the 1st version of white paper on CAR28T Contents
Research Article SenSafe: A Smartphone-Based Traffic Safety Framework by Sensing Vehicle and Pedestrian Behaviors
 Mobile Information Systems Volume 216, Article ID 7967249, 13 pages http://dx.doi.org/1.1155/216/7967249 Research Article SenSafe: A Smartphone-Based Traffic Safety Framework by Sensing Vehicle and Pedestrian
Mobile Information Systems Volume 216, Article ID 7967249, 13 pages http://dx.doi.org/1.1155/216/7967249 Research Article SenSafe: A Smartphone-Based Traffic Safety Framework by Sensing Vehicle and Pedestrian
SIS63-Building the Future-Advanced Integrated Safety Applications: interactive Perception platform and fusion modules results
 SIS63-Building the Future-Advanced Integrated Safety Applications: interactive Perception platform and fusion modules results Angelos Amditis (ICCS) and Lali Ghosh (DEL) 18 th October 2013 20 th ITS World
SIS63-Building the Future-Advanced Integrated Safety Applications: interactive Perception platform and fusion modules results Angelos Amditis (ICCS) and Lali Ghosh (DEL) 18 th October 2013 20 th ITS World