Range Sensing strategies
|
|
|
- Egbert Brooks
- 6 years ago
- Views:
Transcription
1 Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart and Nourbakhsh
2 4.1.6 Range Sensors (time of flight) (1) Large range distance measurement -> called range sensors Range information: key element for localization and environment modeling Ultrasonic sensors as well as laser range sensors make use of propagation speed of sound or electromagnetic waves respectively. The traveled distance of a sound or electromagnetic wave is given by Where d = c. t d = distance traveled (usually round-trip) c = speed of wave propagation t = time of flight.
3 Range Sensors (time of flight) (2) It is important to point out Propagation speed v of sound: 0.3 m/ms Propagation speed v of electromagnetic signals: 0.3 m/ns, one million times faster. 3 meters is 10 ms ultrasonic system only 10 ns for a laser range sensor laser range sensors expensive and delicate The quality of time of flight range sensors manly depends on: Uncertainties about the exact time of arrival of the reflected signal Inaccuracies in the time of fight measure (laser range sensors) Opening angle of transmitted beam (ultrasonic range sensors) Interaction with the target (surface, specular reflections) Variation of propagation speed Speed of mobile robot and target (if not at stand still)
4 4.1.6 Ultrasonic Sensor (time of flight, sound) (1) transmit a packet of (ultrasonic) pressure waves distance d of the echoing object can be calculated based on the propagation speed of sound c and the time of flight t. The speed of sound c (340 m/s) in air is given by where : ration of specific heats R: gas constant T: temperature in degree Kelvin
5 4.1.6 Ultrasonic Sensor (time of flight, sound) (2) Wave packet Transmitted sound Analog echo signal Threshold threshold Digital echo signal Integrated time Output signal integrator Time of flight (sensor output) Send a wave packet wait until in comes back
6 Ultrasonic Sensor (time of flight, sound) (3) typically a frequency: khz generation of sound wave: piezo transducer transmitter and receiver separated or not separated sound beam propagates in a cone like manner opening angles around 20 to 40 degrees regions of constant depth segments of an arc (sphere for 3D) Effective range 12cm, 5m Accuracy between 98-99% Typical intensity distribution of a ultrasonic sensor
7 4.1.6 Ultrasonic Sensor (time of flight, sound) (4) Other problems for ultrasonic sensors soft surfaces that absorb most of the sound energy surfaces that are far from being perpendicular to the direction of the sound -> specular reflection a) 360 scan b) results from different geometric primitives
8 Sources of Error Opening angle Crosstalk Specular reflection Slide adopted from C. Stachniss

9 Typical Ultrasound Scan Slide adopted from C. Stachniss
10 Parallel Operation Given a 15 degrees opening angle, 24 sensors are needed to cover the whole 360 degrees area around the robot. Let the maximum range we are interested in be 10m. The time of flight then is 2*10/330 s=0.06 s A complete scan requires 1.45 s To allow frequent updates (necessary for high speed) the sensors have to be fired in parallel. This increases the risk of crosstalk Slide adopted from C. Stachniss
11 Laser Range Sensor (time of flight, electromagnetic) (1) Laser light instead of sound Transmitted and received beams coaxial Transmitter illuminates a target with a collimated beam Receiver detects the time needed for round-trip Lidar (light detection and ranging)
12 4.1.6 Laser Range Sensor (time of flight, electromagnetic) (2) Time of flight measurement Pulsed laser measurement of elapsed time directly (as in ultrasound) Beat frequency between a frequency modulated continuous wave and its received reflection Phase shift measurement to produce range estimation technically easier than the above two methods.
13 Laser Range Sensor (time of flight, electromagnetic) (3) Phase-Shift Measurement

14 4.1.6 Laser Range Sensor (time of flight, electromagnetic) (5) Confidence in the range (phase estimate) is inversely proportional to the square of the received signal amplitude. Hence dark, distant objects will not produce such good range estimated as closer brighter objects
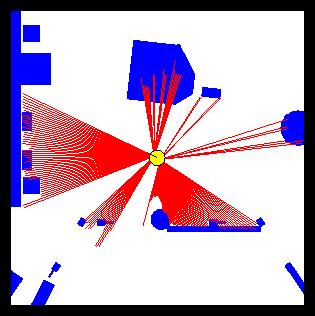
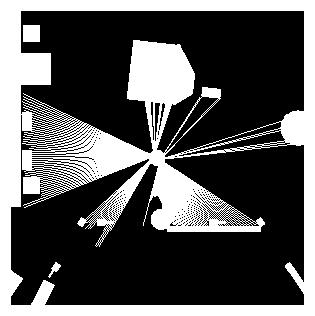
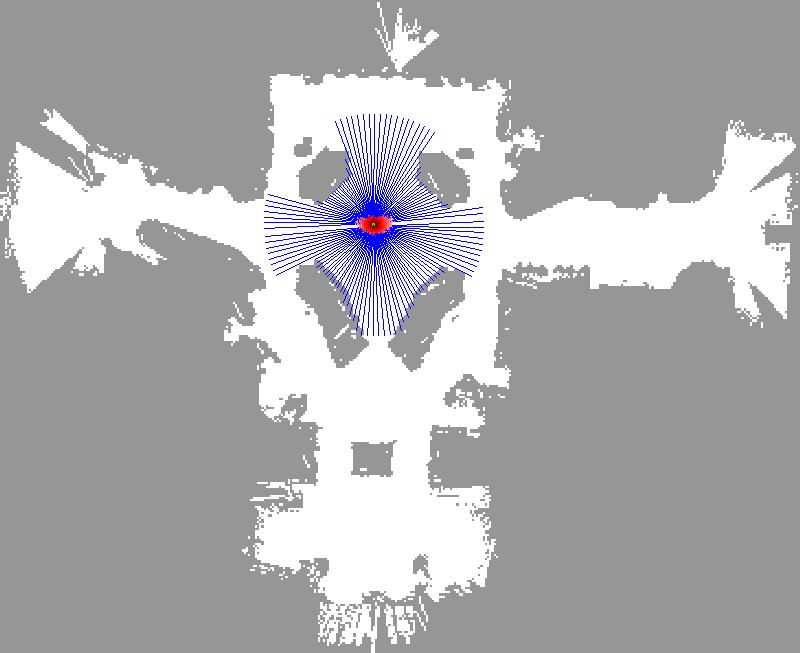
15 Laser Range Sensor (time of flight, electromagnetic) Typical range image of a 2D laser range sensor with a rotating mirror. The length of the lines through the measurement points indicate the uncertainties.





16 Autonomous Mobile Robots, Chapter 4 Robots Equipped with Laser Scanners 18


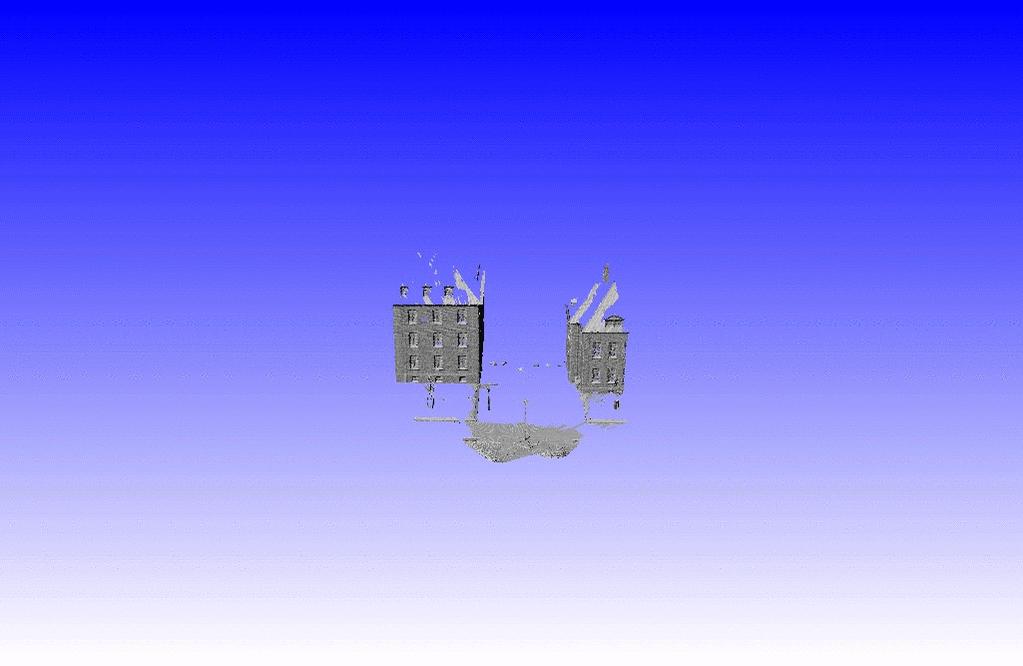
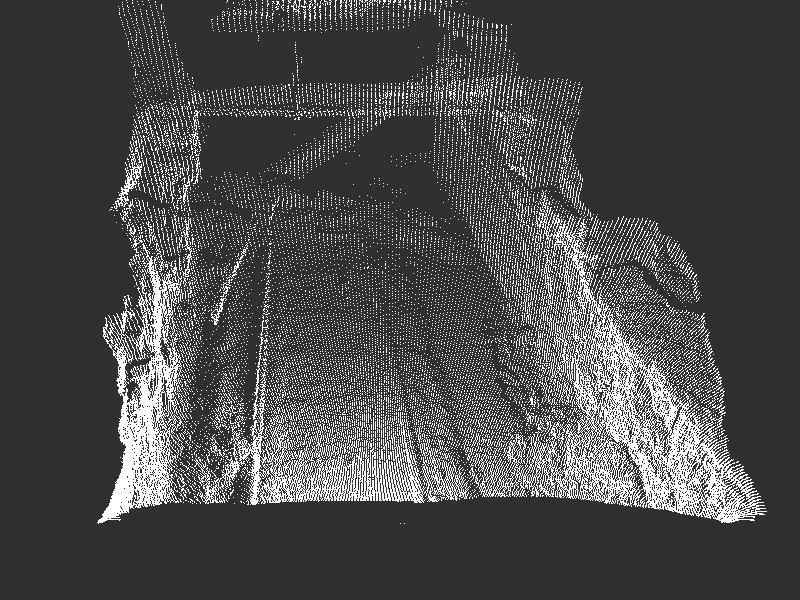
17 Typical Scans 19
18 4.1.6 Triangulation Ranging geometrical properties of the image to establish a distance measurement e.g. project a well defined light pattern (e.g. point, line) onto the environment. reflected light is than captured by a photo-sensitive line or matrix (camera) sensor device simple triangulation allows to establish a distance. e.g. size of an captured object is precisely known triangulation without light projecting
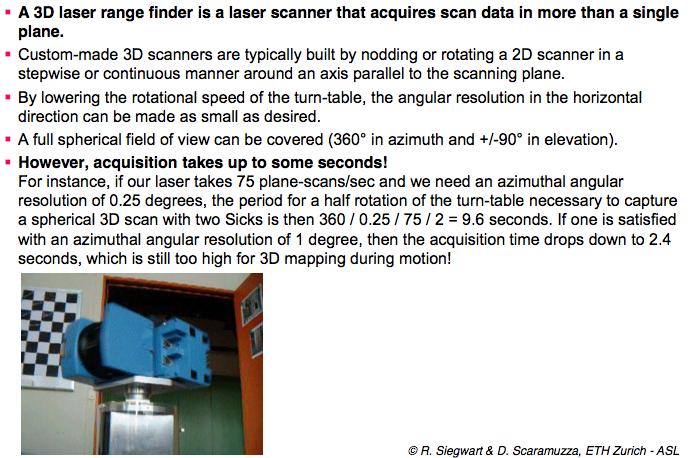
19 3D Laser
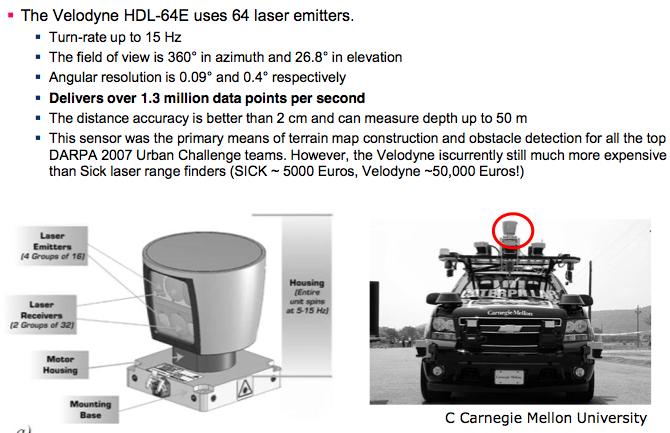
20 3D Laser
21 Structured Light (vision, 2 or 3D) a b u b Eliminate the correspondence problem by projecting structured light on the scene. Slits of light or emit collimated light (possibly laser) by means of a rotating mirror. Light perceived by camera Range to an illuminated point can then be determined from simple geometry.
22 4.1.4 Heading Sensors Heading sensors can be proprioceptive (gyroscope, inclinometer) or exteroceptive (compass). Used to determine the robots orientation and inclination. Allow, together with an appropriate velocity information, to integrate the movement to an position estimate. This procedure is called dead reckoning (ship navigation)
23 Compass Since over 2000 B.C. when Chinese suspended a piece of naturally magnetite from a silk thread and used it to guide a chariot over land. Magnetic field on earth absolute measure for orientation. Large variety of solutions to measure the earth magnetic field mechanical magnetic compass direct measure of the magnetic field (Hall-effect, magnetoresistive sensors) Major drawback weakness of the earth field easily disturbed by magnetic objects or other sources not feasible for indoor environments
24 4.1.4 Gyroscope Heading sensors, that keep the orientation to a fixed frame absolute measure for the heading of a mobile system. Two categories, the mechanical and the optical gyroscopes Mechanical Gyroscopes Standard gyro Rated gyro Optical Gyroscopes Rated gyro
25 Mechanical Gyroscopes Concept: inertial properties of a fast spinning rotor gyroscopic precession Angular momentum associated with a spinning wheel keeps the axis of the gyroscope inertially stable. Reactive torque t (tracking stability) is proportional to the spinning speed w, the precession speed W and the wheels inertia I. No torque can be transmitted from the outer pivot to the wheel axis spinning axis will therefore be space-stable Quality: 0.1 in 6 hours If the spinning axis is aligned with the north-south meridian, the earth s rotation has no effect on the gyro s horizontal axis If it points east-west, the horizontal axis reads the earth rotation
26 4.1.5 Ground-Based Active and Passive Beacons Elegant way to solve the localization problem in mobile robotics Beacons are signaling guiding devices with a precisely known position Beacon base navigation is used since the humans started to travel Natural beacons (landmarks) like stars, mountains or the sun Artificial beacons like lighthouses The recently introduced Global Positioning System (GPS) revolutionized modern navigation technology Already one of the key sensors for outdoor mobile robotics For indoor robots GPS is not applicable, Major drawback with the use of beacons in indoor: Beacons require changes in the environment -> costly. Limit flexibility and adaptability to changing environments.
27 4.1.5 Global Positioning System (GPS) (1) Developed for military use Recently it became accessible for commercial applications 24 satellites (including three spares) orbiting the earth every 12 hours at a height of km. Four satellites are located in each of six planes inclined 55 degrees with respect to the plane of the earth s equators Location of any GPS receiver is determined through a time of flight measurement Technical challenges: Time synchronization between the individual satellites and the GPS receiver Real time update of the exact location of the satellites Precise measurement of the time of flight Interferences with other signals
28 Global Positioning System (GPS) (2) 4.1.5
 2 + (Y s Y r ) 2 + (Z s Z r ) 2 If we know at least three distance Measurements, we can solve for Postion on")
29 GPS positioning Simple positioning principle Sattelites send signals, receivers received them with delay ρ = (t r t e ) speed of light ρ = (X s X r ) 2 + (Y s Y r ) 2 + (Z s Z r ) 2 If we know at least three distance Measurements, we can solve for Postion on earth
30 4.1.2 Characterizing Sensor Performance Basic sensor response ratings (cont.) Resolution minimum difference between two values usually: lower limit of dynamic range = resolution for digital sensors it is usually the A/D resolution. Linearity e.g. 5V / 255 (8 bit) variation of output signal as function of the input signal linearity is less important when signal is after treated with a computer Bandwidth or Frequency the speed with which a sensor can provide a stream of readings usually there is an upper limit depending on the sensor and the sampling rate Lower limit is also possible, e.g. acceleration sensor
31 4.1.2 In Situ Sensor Performance (1) Characteristics that are especially relevant for real world environments Sensitivity ratio of output change to input change however, in real world environment, the sensor has very often high sensitivity to other environmental changes, e.g. illumination Cross-sensitivity sensitivity to environmental parameters that are orthogonal to the target parameters Error / Accuracy difference between the sensor s output and the true value m = measured value v = true value
32 4.1.2 In Situ Sensor Performance (2) Characteristics that are especially relevant for real world environments Systematic error -> deterministic errors caused by factors that can (in theory) be modeled -> prediction e.g. calibration of a laser sensor or of the distortion cause by the optic of a camera Random error -> non-deterministic no prediction possible however, they can be described probabilistically e.g. Hue instability of camera, black level noise of camera.. Precision reproducibility of sensor results
33 4.1.2 Characterizing Error: The Challenges in Mobile Robotics Mobile Robot has to perceive, analyze and interpret the state of the surrounding Measurements in real world environment are dynamically changing and error prone. Examples: changing illuminations specular reflections light or sound absorbing surfaces cross-sensitivity of robot sensor to robot pose and robot-environment dynamics rarely possible to model -> appear as random errors systematic errors and random errors might be well defined in controlled environment. This is not the case for mobile robots!!
34 4.1.2 Multi-Modal Error Distributions: The Challenges in Behavior of sensors modeled by probability distribution (random errors) usually very little knowledge about the causes of random errors often probability distribution is assumed to be symmetric or even Gaussian however, it is important to realize how wrong this can be! Examples: Sonar (ultrasonic) sensor might overestimate the distance in real environment and is therefore not symmetric Thus the sonar sensor might be best modeled by two modes: - mode for the case that the signal returns directly - mode for the case that the signals returns after multi-path reflections. Stereo vision system might correlate to images incorrectly, thus causing results that make no sense at all
Brainstorm. In addition to cameras / Kinect, what other kinds of sensors would be useful?
 Brainstorm In addition to cameras / Kinect, what other kinds of sensors would be useful? How do you evaluate different sensors? Classification of Sensors Proprioceptive sensors measure values internally
Brainstorm In addition to cameras / Kinect, what other kinds of sensors would be useful? How do you evaluate different sensors? Classification of Sensors Proprioceptive sensors measure values internally
Lab 2. Logistics & Travel. Installing all the packages. Makeup class Recorded class Class time to work on lab Remote class
 Lab 2 Installing all the packages Logistics & Travel Makeup class Recorded class Class time to work on lab Remote class Classification of Sensors Proprioceptive sensors internal to robot Exteroceptive
Lab 2 Installing all the packages Logistics & Travel Makeup class Recorded class Class time to work on lab Remote class Classification of Sensors Proprioceptive sensors internal to robot Exteroceptive
MEM380 Applied Autonomous Robots I Fall Introduction to Sensors & Perception
 MEM380 Applied Autonomous Robots I Fall 2012 Introduction to Sensors & Perception Perception Sensors Uncertainty t Features Localization "Position" Global Map Cognition Environment Model Local Map Path
MEM380 Applied Autonomous Robots I Fall 2012 Introduction to Sensors & Perception Perception Sensors Uncertainty t Features Localization "Position" Global Map Cognition Environment Model Local Map Path
COS Lecture 7 Autonomous Robot Navigation
 COS 495 - Lecture 7 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
COS 495 - Lecture 7 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
MOBILE ROBOTICS. Sensors An Introduction
 CY 02CFIC CFIDV RO OBOTIC CA 01 MOBILE ROBOTICS Sensors An Introduction Basilio Bona DAUIN Politecnico di Torino Basilio Bona DAUIN Politecnico di Torino 001/1 CY CA 01CFIDV 02CFIC OBOTIC RO An Example
CY 02CFIC CFIDV RO OBOTIC CA 01 MOBILE ROBOTICS Sensors An Introduction Basilio Bona DAUIN Politecnico di Torino Basilio Bona DAUIN Politecnico di Torino 001/1 CY CA 01CFIDV 02CFIC OBOTIC RO An Example
Perception. Autonomous Mobile Robots. Sensors. Vision Uncertainties, Fusion Features. Autonomous Systems Lab. Zürich. Cognition.
 Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Fusion Features
Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Fusion Features
EEE 187: Robotics. Summary 11: Sensors used in Robotics
 1 EEE 187: Robotics Summary 11: Sensors used in Robotics Fig. 1. Sensors are needed to obtain internal quantities such as joint angle and external information such as location in maze Sensors are used
1 EEE 187: Robotics Summary 11: Sensors used in Robotics Fig. 1. Sensors are needed to obtain internal quantities such as joint angle and external information such as location in maze Sensors are used
Intelligent Robotics Sensors and Actuators
 Intelligent Robotics Sensors and Actuators Luís Paulo Reis (University of Porto) Nuno Lau (University of Aveiro) The Perception Problem Do we need perception? Complexity Uncertainty Dynamic World Detection/Correction
Intelligent Robotics Sensors and Actuators Luís Paulo Reis (University of Porto) Nuno Lau (University of Aveiro) The Perception Problem Do we need perception? Complexity Uncertainty Dynamic World Detection/Correction
CENG 5931 HW 5 Mobile Robotics Due March 5. Sensors for Mobile Robots
 CENG 5931 HW 5 Mobile Robotics Due March 5 Sensors for Mobile Robots Dr. T. L. Harman: 281 283-3774 Office D104 For reports: Read HomeworkEssayRequirements on the web site and follow instructions which
CENG 5931 HW 5 Mobile Robotics Due March 5 Sensors for Mobile Robots Dr. T. L. Harman: 281 283-3774 Office D104 For reports: Read HomeworkEssayRequirements on the web site and follow instructions which
Development of intelligent systems
 Development of intelligent systems (RInS) Robot sensors Danijel Skočaj University of Ljubljana Faculty of Computer and Information Science Academic year: 2017/18 Development of intelligent systems Robotic
Development of intelligent systems (RInS) Robot sensors Danijel Skočaj University of Ljubljana Faculty of Computer and Information Science Academic year: 2017/18 Development of intelligent systems Robotic
Robot Hardware Non-visual Sensors. Ioannis Rekleitis
 Robot Hardware Non-visual Sensors Ioannis Rekleitis Robot Sensors Sensors are devices that can sense and measure physical properties of the environment, e.g. temperature, luminance, resistance to touch,
Robot Hardware Non-visual Sensors Ioannis Rekleitis Robot Sensors Sensors are devices that can sense and measure physical properties of the environment, e.g. temperature, luminance, resistance to touch,
Sensing. Autonomous systems. Properties. Classification. Key requirement of autonomous systems. An AS should be connected to the outside world.
 Sensing Key requirement of autonomous systems. An AS should be connected to the outside world. Autonomous systems Convert a physical value to an electrical value. From temperature, humidity, light, to
Sensing Key requirement of autonomous systems. An AS should be connected to the outside world. Autonomous systems Convert a physical value to an electrical value. From temperature, humidity, light, to
An Example of robots with their sensors
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 1 An Example of robots with their sensors Basilio Bona ROBOTICS 01PEEQW 3 Another example Omnivision
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 1 An Example of robots with their sensors Basilio Bona ROBOTICS 01PEEQW 3 Another example Omnivision
An Example of robots with their sensors
 ROBOTICA 03CFIOR DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 1 An Example of robots with their sensors 3 Another example Omnivision Camera (360 ) Pan-Tilt-Zoom (PTZ) camera
ROBOTICA 03CFIOR DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 1 An Example of robots with their sensors 3 Another example Omnivision Camera (360 ) Pan-Tilt-Zoom (PTZ) camera
10/21/2009. d R. d L. r L d B L08. POSE ESTIMATION, MOTORS. EECS 498-6: Autonomous Robotics Laboratory. Midterm 1. Mean: 53.9/67 Stddev: 7.
 1 d R d L L08. POSE ESTIMATION, MOTORS EECS 498-6: Autonomous Robotics Laboratory r L d B Midterm 1 2 Mean: 53.9/67 Stddev: 7.73 1 Today 3 Position Estimation Odometry IMUs GPS Motor Modelling Kinematics:
1 d R d L L08. POSE ESTIMATION, MOTORS EECS 498-6: Autonomous Robotics Laboratory r L d B Midterm 1 2 Mean: 53.9/67 Stddev: 7.73 1 Today 3 Position Estimation Odometry IMUs GPS Motor Modelling Kinematics:
Indoor Positioning by the Fusion of Wireless Metrics and Sensors
 Indoor Positioning by the Fusion of Wireless Metrics and Sensors Asst. Prof. Dr. Özgür TAMER Dokuz Eylül University Electrical and Electronics Eng. Dept Indoor Positioning Indoor positioning systems (IPS)
Indoor Positioning by the Fusion of Wireless Metrics and Sensors Asst. Prof. Dr. Özgür TAMER Dokuz Eylül University Electrical and Electronics Eng. Dept Indoor Positioning Indoor positioning systems (IPS)
Lecture: Sensors , Fall 2008
 All images are in the public domain and were obtained from the web unless otherwise cited. 15-491, Fall 2008 Outline Sensor types and overview Common sensors in detail Sensor modeling and calibration Perception
All images are in the public domain and were obtained from the web unless otherwise cited. 15-491, Fall 2008 Outline Sensor types and overview Common sensors in detail Sensor modeling and calibration Perception
Chapter 2 Sensors. The Author(s) 2018 M. Ben-Ari and F. Mondada, Elements of Robotics, https://doi.org/ / _2
 2018 M. Ben-Ari and F. Mondada, Elements of Robotics, https://doi.org/ / _2") Chapter 2 Sensors A robot cannot move a specific distance in a specific direction just by setting the relative power of the motors of the two wheels and the period of time that the motors run. Suppose
Chapter 2 Sensors A robot cannot move a specific distance in a specific direction just by setting the relative power of the motors of the two wheels and the period of time that the motors run. Suppose
Physics 4C Chabot College Scott Hildreth
 Physics 4C Chabot College Scott Hildreth The Inverse Square Law for Light Intensity vs. Distance Using Microwaves Experiment Goals: Experimentally test the inverse square law for light using Microwaves.
Physics 4C Chabot College Scott Hildreth The Inverse Square Law for Light Intensity vs. Distance Using Microwaves Experiment Goals: Experimentally test the inverse square law for light using Microwaves.
Estimation of Absolute Positioning of mobile robot using U-SAT
 Estimation of Absolute Positioning of mobile robot using U-SAT Su Yong Kim 1, SooHong Park 2 1 Graduate student, Department of Mechanical Engineering, Pusan National University, KumJung Ku, Pusan 609-735,
Estimation of Absolute Positioning of mobile robot using U-SAT Su Yong Kim 1, SooHong Park 2 1 Graduate student, Department of Mechanical Engineering, Pusan National University, KumJung Ku, Pusan 609-735,
Ultrasound-Based Indoor Robot Localization Using Ambient Temperature Compensation
 Acta Universitatis Sapientiae Electrical and Mechanical Engineering, 8 (2016) 19-28 DOI: 10.1515/auseme-2017-0002 Ultrasound-Based Indoor Robot Localization Using Ambient Temperature Compensation Csaba
Acta Universitatis Sapientiae Electrical and Mechanical Engineering, 8 (2016) 19-28 DOI: 10.1515/auseme-2017-0002 Ultrasound-Based Indoor Robot Localization Using Ambient Temperature Compensation Csaba
1.6 Beam Wander vs. Image Jitter
 8 Chapter 1 1.6 Beam Wander vs. Image Jitter It is common at this point to look at beam wander and image jitter and ask what differentiates them. Consider a cooperative optical communication system that
8 Chapter 1 1.6 Beam Wander vs. Image Jitter It is common at this point to look at beam wander and image jitter and ask what differentiates them. Consider a cooperative optical communication system that
Autonomous Underwater Vehicle Navigation.
 Autonomous Underwater Vehicle Navigation. We are aware that electromagnetic energy cannot propagate appreciable distances in the ocean except at very low frequencies. As a result, GPS-based and other such
Autonomous Underwater Vehicle Navigation. We are aware that electromagnetic energy cannot propagate appreciable distances in the ocean except at very low frequencies. As a result, GPS-based and other such
Helicopter Aerial Laser Ranging
 Helicopter Aerial Laser Ranging Håkan Sterner TopEye AB P.O.Box 1017, SE-551 11 Jönköping, Sweden 1 Introduction Measuring distances with light has been used for terrestrial surveys since the fifties.
Helicopter Aerial Laser Ranging Håkan Sterner TopEye AB P.O.Box 1017, SE-551 11 Jönköping, Sweden 1 Introduction Measuring distances with light has been used for terrestrial surveys since the fifties.
Localization. of mobile devices. Seminar: Mobile Computing. IFW C42 Tuesday, 29th May 2001 Roger Zimmermann
 Localization of mobile devices Seminar: Mobile Computing IFW C42 Tuesday, 29th May 2001 Roger Zimmermann Overview Introduction Why Technologies Absolute Positioning Relative Positioning Selected Systems
Localization of mobile devices Seminar: Mobile Computing IFW C42 Tuesday, 29th May 2001 Roger Zimmermann Overview Introduction Why Technologies Absolute Positioning Relative Positioning Selected Systems
By Pierre Olivier, Vice President, Engineering and Manufacturing, LeddarTech Inc.
 Leddar optical time-of-flight sensing technology, originally discovered by the National Optics Institute (INO) in Quebec City and developed and commercialized by LeddarTech, is a unique LiDAR technology
Leddar optical time-of-flight sensing technology, originally discovered by the National Optics Institute (INO) in Quebec City and developed and commercialized by LeddarTech, is a unique LiDAR technology
ANNUAL OF NAVIGATION 16/2010
 ANNUAL OF NAVIGATION 16/2010 STANISŁAW KONATOWSKI, MARCIN DĄBROWSKI, ANDRZEJ PIENIĘŻNY Military University of Technology VEHICLE POSITIONING SYSTEM BASED ON GPS AND AUTONOMIC SENSORS ABSTRACT In many real
ANNUAL OF NAVIGATION 16/2010 STANISŁAW KONATOWSKI, MARCIN DĄBROWSKI, ANDRZEJ PIENIĘŻNY Military University of Technology VEHICLE POSITIONING SYSTEM BASED ON GPS AND AUTONOMIC SENSORS ABSTRACT In many real
Govt. Engineering College Jhalawar Model Question Paper Subject- Remote Sensing & GIS
 Govt. Engineering College Jhalawar Model Question Paper Subject- Remote Sensing & GIS Time: Max. Marks: Q1. What is remote Sensing? Explain the basic components of a Remote Sensing system. Q2. What is
Govt. Engineering College Jhalawar Model Question Paper Subject- Remote Sensing & GIS Time: Max. Marks: Q1. What is remote Sensing? Explain the basic components of a Remote Sensing system. Q2. What is
Solar Powered Obstacle Avoiding Robot
 Solar Powered Obstacle Avoiding Robot S.S. Subashka Ramesh 1, Tarun Keshri 2, Sakshi Singh 3, Aastha Sharma 4 1 Asst. professor, SRM University, Chennai, Tamil Nadu, India. 2, 3, 4 B.Tech Student, SRM
Solar Powered Obstacle Avoiding Robot S.S. Subashka Ramesh 1, Tarun Keshri 2, Sakshi Singh 3, Aastha Sharma 4 1 Asst. professor, SRM University, Chennai, Tamil Nadu, India. 2, 3, 4 B.Tech Student, SRM
Satellite Sub-systems
 Satellite Sub-systems Although the main purpose of communication satellites is to provide communication services, meaning that the communication sub-system is the most important sub-system of a communication
Satellite Sub-systems Although the main purpose of communication satellites is to provide communication services, meaning that the communication sub-system is the most important sub-system of a communication
Sensing and Perception
 Unit D tion Exploring Robotics Spring, 2013 D.1 Why does a robot need sensors? the environment is complex the environment is dynamic enable the robot to learn about current conditions in its environment.
Unit D tion Exploring Robotics Spring, 2013 D.1 Why does a robot need sensors? the environment is complex the environment is dynamic enable the robot to learn about current conditions in its environment.
GPS data correction using encoders and INS sensors
 GPS data correction using encoders and INS sensors Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, Avenue de la Renaissance 30, 1000 Brussels, Belgium sidahmed.berrabah@rma.ac.be
GPS data correction using encoders and INS sensors Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, Avenue de la Renaissance 30, 1000 Brussels, Belgium sidahmed.berrabah@rma.ac.be
SONAR THEORY AND APPLICATIONS
 SONAR THEORY AND APPLICATIONS EXCERPT FROM IMAGENEX MODEL 855 COLOR IMAGING SONAR USER'S MANUAL IMAGENEX TECHNOLOGY CORP. #209-1875 BROADWAY ST. PORT COQUITLAM, B.C. V3C 4Z1 CANADA TEL: (604) 944-8248
SONAR THEORY AND APPLICATIONS EXCERPT FROM IMAGENEX MODEL 855 COLOR IMAGING SONAR USER'S MANUAL IMAGENEX TECHNOLOGY CORP. #209-1875 BROADWAY ST. PORT COQUITLAM, B.C. V3C 4Z1 CANADA TEL: (604) 944-8248
Chapter 1 Introduction
 Wireless Information Transmission System Lab. Chapter 1 Introduction National Sun Yat-sen University Table of Contents Elements of a Digital Communication System Communication Channels and Their Wire-line
Wireless Information Transmission System Lab. Chapter 1 Introduction National Sun Yat-sen University Table of Contents Elements of a Digital Communication System Communication Channels and Their Wire-line
Sensing self motion. Key points: Why robots need self-sensing Sensors for proprioception in biological systems in robot systems
 Sensing self motion Key points: Why robots need self-sensing Sensors for proprioception in biological systems in robot systems Position sensing Velocity and acceleration sensing Force sensing Vision based
Sensing self motion Key points: Why robots need self-sensing Sensors for proprioception in biological systems in robot systems Position sensing Velocity and acceleration sensing Force sensing Vision based
Introduction to Embedded and Real-Time Systems W12: An Introduction to Localization Techniques in Embedded Systems
 Introduction to Embedded and Real-Time Systems W12: An Introduction to Localization Techniques in Embedded Systems Outline Motivation Terminology and classification Selected positioning systems and techniques
Introduction to Embedded and Real-Time Systems W12: An Introduction to Localization Techniques in Embedded Systems Outline Motivation Terminology and classification Selected positioning systems and techniques
Sensors and Actuators
 Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-4015 Sensors and Actuators Robotics for Computer Engineering students A.A.
Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-4015 Sensors and Actuators Robotics for Computer Engineering students A.A.
OBSTACLE DETECTION AND COLLISION AVOIDANCE USING ULTRASONIC DISTANCE SENSORS FOR AN AUTONOMOUS QUADROCOPTER
 OBSTACLE DETECTION AND COLLISION AVOIDANCE USING ULTRASONIC DISTANCE SENSORS FOR AN AUTONOMOUS QUADROCOPTER Nils Gageik, Thilo Müller, Sergio Montenegro University of Würzburg, Aerospace Information Technology
OBSTACLE DETECTION AND COLLISION AVOIDANCE USING ULTRASONIC DISTANCE SENSORS FOR AN AUTONOMOUS QUADROCOPTER Nils Gageik, Thilo Müller, Sergio Montenegro University of Würzburg, Aerospace Information Technology
Instrumentation (ch. 4 in Lecture notes)
") TMR7 Experimental methods in Marine Hydrodynamics week 35 Instrumentation (ch. 4 in Lecture notes) Measurement systems short introduction Measurement using strain gauges Calibration Data acquisition Different
TMR7 Experimental methods in Marine Hydrodynamics week 35 Instrumentation (ch. 4 in Lecture notes) Measurement systems short introduction Measurement using strain gauges Calibration Data acquisition Different
Revolutionizing 2D measurement. Maximizing longevity. Challenging expectations. R2100 Multi-Ray LED Scanner
 Revolutionizing 2D measurement. Maximizing longevity. Challenging expectations. R2100 Multi-Ray LED Scanner A Distance Ahead A Distance Ahead: Your Crucial Edge in the Market The new generation of distancebased
Revolutionizing 2D measurement. Maximizing longevity. Challenging expectations. R2100 Multi-Ray LED Scanner A Distance Ahead A Distance Ahead: Your Crucial Edge in the Market The new generation of distancebased
Laser Telemetric System (Metrology)
") Laser Telemetric System (Metrology) Laser telemetric system is a non-contact gauge that measures with a collimated laser beam (Refer Fig. 10.26). It measure at the rate of 150 scans per second. It basically
Laser Telemetric System (Metrology) Laser telemetric system is a non-contact gauge that measures with a collimated laser beam (Refer Fig. 10.26). It measure at the rate of 150 scans per second. It basically
Velocity and Acceleration Measurements
 Lecture (8) Velocity and Acceleration Measurements Prof. Kasim M. Al-Aubidy Philadelphia University-Jordan AMSS-MSc Prof. Kasim Al-Aubidy 1 Introduction: The measure of velocity depends on the scale of
Lecture (8) Velocity and Acceleration Measurements Prof. Kasim M. Al-Aubidy Philadelphia University-Jordan AMSS-MSc Prof. Kasim Al-Aubidy 1 Introduction: The measure of velocity depends on the scale of
A CubeSat-Based Optical Communication Network for Low Earth Orbit
 A CubeSat-Based Optical Communication Network for Low Earth Orbit Richard Welle, Alexander Utter, Todd Rose, Jerry Fuller, Kristin Gates, Benjamin Oakes, and Siegfried Janson The Aerospace Corporation
A CubeSat-Based Optical Communication Network for Low Earth Orbit Richard Welle, Alexander Utter, Todd Rose, Jerry Fuller, Kristin Gates, Benjamin Oakes, and Siegfried Janson The Aerospace Corporation
NCERT solution for Sound
 NCERT solution for Sound 1 Question 1 How does the sound produce by a vibrating object in a medium reach your ear? When an object vibrates, it vibrates the neighboring particles of the medium. These vibrating
NCERT solution for Sound 1 Question 1 How does the sound produce by a vibrating object in a medium reach your ear? When an object vibrates, it vibrates the neighboring particles of the medium. These vibrating
Time of Flight Capture
 Time of Flight Capture CS635 Spring 2017 Daniel G. Aliaga Department of Computer Science Purdue University Range Acquisition Taxonomy Range acquisition Contact Transmissive Mechanical (CMM, jointed arm)
Time of Flight Capture CS635 Spring 2017 Daniel G. Aliaga Department of Computer Science Purdue University Range Acquisition Taxonomy Range acquisition Contact Transmissive Mechanical (CMM, jointed arm)
Wireless Localization Techniques CS441
 Wireless Localization Techniques CS441 Variety of Applications Two applications: Passive habitat monitoring: Where is the bird? What kind of bird is it? Asset tracking: Where is the projector? Why is it
Wireless Localization Techniques CS441 Variety of Applications Two applications: Passive habitat monitoring: Where is the bird? What kind of bird is it? Asset tracking: Where is the projector? Why is it
INTRODUCTION TO VEHICLE NAVIGATION SYSTEM LECTURE 5.1 SGU 4823 SATELLITE NAVIGATION
 INTRODUCTION TO VEHICLE NAVIGATION SYSTEM LECTURE 5.1 SGU 4823 SATELLITE NAVIGATION AzmiHassan SGU4823 SatNav 2012 1 Navigation Systems Navigation ( Localisation ) may be defined as the process of determining
INTRODUCTION TO VEHICLE NAVIGATION SYSTEM LECTURE 5.1 SGU 4823 SATELLITE NAVIGATION AzmiHassan SGU4823 SatNav 2012 1 Navigation Systems Navigation ( Localisation ) may be defined as the process of determining
Ultrasonics. Introduction
 Ultrasonics Introduction Ultrasonics is the term used to describe those sound waves whose frequency is above the audible range of human ear upward from approximately 20kHz to several MHz. The ultrasonics
Ultrasonics Introduction Ultrasonics is the term used to describe those sound waves whose frequency is above the audible range of human ear upward from approximately 20kHz to several MHz. The ultrasonics
Cooperative navigation: outline
 Positioning and Navigation in GPS-challenged Environments: Cooperative Navigation Concept Dorota A Grejner-Brzezinska, Charles K Toth, Jong-Ki Lee and Xiankun Wang Satellite Positioning and Inertial Navigation
Positioning and Navigation in GPS-challenged Environments: Cooperative Navigation Concept Dorota A Grejner-Brzezinska, Charles K Toth, Jong-Ki Lee and Xiankun Wang Satellite Positioning and Inertial Navigation
Sensing and Perception: Localization and positioning. by Isaac Skog
 Sensing and Perception: Localization and positioning by Isaac Skog Outline Basic information sources and performance measurements. Motion and positioning sensors. Positioning and motion tracking technologies.
Sensing and Perception: Localization and positioning by Isaac Skog Outline Basic information sources and performance measurements. Motion and positioning sensors. Positioning and motion tracking technologies.
Ultrasonic Level Transducer Type: MPUL06 Article No.: ca. 122
 Type: Article No.: 0067720.006 Dimensions ø95 PG7 45.25 16 101 ca. 122 ø53 NPS 2" Figure 1: Ultrasonic Level Transducer Description and application The MPULxx is an ultrasonic transducer used for determining
Type: Article No.: 0067720.006 Dimensions ø95 PG7 45.25 16 101 ca. 122 ø53 NPS 2" Figure 1: Ultrasonic Level Transducer Description and application The MPULxx is an ultrasonic transducer used for determining
MEM380 Applied Autonomous Robots I Winter Feedback Control USARSim
 MEM380 Applied Autonomous Robots I Winter 2011 Feedback Control USARSim Transforming Accelerations into Position Estimates In a perfect world It s not a perfect world. We have noise and bias in our acceleration
MEM380 Applied Autonomous Robots I Winter 2011 Feedback Control USARSim Transforming Accelerations into Position Estimates In a perfect world It s not a perfect world. We have noise and bias in our acceleration
16. Sensors 217. eye hand control. br-er16-01e.cdr
 16. Sensors 16. Sensors 217 The welding process is exposed to disturbances like misalignment of workpiece, inaccurate preparation, machine and device tolerances, and proess disturbances, Figure 16.1. sensor
16. Sensors 16. Sensors 217 The welding process is exposed to disturbances like misalignment of workpiece, inaccurate preparation, machine and device tolerances, and proess disturbances, Figure 16.1. sensor
The physics of ultrasound. Dr Graeme Taylor Guy s & St Thomas NHS Trust
 The physics of ultrasound Dr Graeme Taylor Guy s & St Thomas NHS Trust Physics & Instrumentation Modern ultrasound equipment is continually evolving This talk will cover the basics What will be covered?
The physics of ultrasound Dr Graeme Taylor Guy s & St Thomas NHS Trust Physics & Instrumentation Modern ultrasound equipment is continually evolving This talk will cover the basics What will be covered?
NAVIGATION OF MOBILE ROBOTS
 MOBILE ROBOTICS course NAVIGATION OF MOBILE ROBOTS Maria Isabel Ribeiro Pedro Lima mir@isr.ist.utl.pt pal@isr.ist.utl.pt Instituto Superior Técnico (IST) Instituto de Sistemas e Robótica (ISR) Av.Rovisco
MOBILE ROBOTICS course NAVIGATION OF MOBILE ROBOTS Maria Isabel Ribeiro Pedro Lima mir@isr.ist.utl.pt pal@isr.ist.utl.pt Instituto Superior Técnico (IST) Instituto de Sistemas e Robótica (ISR) Av.Rovisco
Integrated Navigation System
 Integrated Navigation System Adhika Lie adhika@aem.umn.edu AEM 5333: Design, Build, Model, Simulate, Test and Fly Small Uninhabited Aerial Vehicles Feb 14, 2013 1 Navigation System Where am I? Position,
Integrated Navigation System Adhika Lie adhika@aem.umn.edu AEM 5333: Design, Build, Model, Simulate, Test and Fly Small Uninhabited Aerial Vehicles Feb 14, 2013 1 Navigation System Where am I? Position,
Chapter 6 Part 3. Attitude Sensors. AERO 423 Fall 2004
 Chapter 6 Part 3 Attitude Sensors AERO 423 Fall 2004 Sensors The types of sensors used for attitude determination are: 1. horizon sensors (or conical Earth scanners), 2. sun sensors, 3. star sensors, 4.
Chapter 6 Part 3 Attitude Sensors AERO 423 Fall 2004 Sensors The types of sensors used for attitude determination are: 1. horizon sensors (or conical Earth scanners), 2. sun sensors, 3. star sensors, 4.
AIRCRAFT AVIONIC SYSTEMS
 AIRCRAFT AVIONIC SYSTEMS B-777 cockpit Package C:\Documents and ettings\administrato Course Outline Radio wave propagation Aircraft Navigation Systems - Very High Omni-range (VOR) system - Instrument Landing
AIRCRAFT AVIONIC SYSTEMS B-777 cockpit Package C:\Documents and ettings\administrato Course Outline Radio wave propagation Aircraft Navigation Systems - Very High Omni-range (VOR) system - Instrument Landing
Sensors. human sensing. basic sensory. advanced sensory. 5+N senses <link> tactile touchless (distant) virtual. e.g. camera, radar / lidar, MS Kinect
 virtual. e.g. camera, radar / lidar, MS Kinect") Sensors human sensing 5+N senses basic sensory tactile touchless (distant) virtual advanced sensory e.g. camera, radar / lidar, MS Kinect Human senses Traditional sight smell taste touch hearing
Sensors human sensing 5+N senses basic sensory tactile touchless (distant) virtual advanced sensory e.g. camera, radar / lidar, MS Kinect Human senses Traditional sight smell taste touch hearing
Chapter 16 Light Waves and Color
 Chapter 16 Light Waves and Color Lecture PowerPoint Copyright The McGraw-Hill Companies, Inc. Permission required for reproduction or display. What causes color? What causes reflection? What causes color?
Chapter 16 Light Waves and Color Lecture PowerPoint Copyright The McGraw-Hill Companies, Inc. Permission required for reproduction or display. What causes color? What causes reflection? What causes color?
RECOMMENDATION ITU-R S *
 Rec. ITU-R S.1339-1 1 RECOMMENDATION ITU-R S.1339-1* Rec. ITU-R S.1339-1 SHARING BETWEEN SPACEBORNE PASSIVE SENSORS OF THE EARTH EXPLORATION-SATELLITE SERVICE AND INTER-SATELLITE LINKS OF GEOSTATIONARY-SATELLITE
Rec. ITU-R S.1339-1 1 RECOMMENDATION ITU-R S.1339-1* Rec. ITU-R S.1339-1 SHARING BETWEEN SPACEBORNE PASSIVE SENSORS OF THE EARTH EXPLORATION-SATELLITE SERVICE AND INTER-SATELLITE LINKS OF GEOSTATIONARY-SATELLITE
5. Transducers Definition and General Concept of Transducer Classification of Transducers
 5.1. Definition and General Concept of Definition The transducer is a device which converts one form of energy into another form. Examples: Mechanical transducer and Electrical transducer Electrical A
5.1. Definition and General Concept of Definition The transducer is a device which converts one form of energy into another form. Examples: Mechanical transducer and Electrical transducer Electrical A
Criteria for Optical Systems: Optical Path Difference How do we determine the quality of a lens system? Several criteria used in optical design
 Criteria for Optical Systems: Optical Path Difference How do we determine the quality of a lens system? Several criteria used in optical design Computer Aided Design Several CAD tools use Ray Tracing (see
Criteria for Optical Systems: Optical Path Difference How do we determine the quality of a lens system? Several criteria used in optical design Computer Aided Design Several CAD tools use Ray Tracing (see
Section 1: Sound. Sound and Light Section 1
 Sound and Light Section 1 Section 1: Sound Preview Key Ideas Bellringer Properties of Sound Sound Intensity and Decibel Level Musical Instruments Hearing and the Ear The Ear Ultrasound and Sonar Sound
Sound and Light Section 1 Section 1: Sound Preview Key Ideas Bellringer Properties of Sound Sound Intensity and Decibel Level Musical Instruments Hearing and the Ear The Ear Ultrasound and Sonar Sound
SMARTSCAN Smart Pushbroom Imaging System for Shaky Space Platforms
 SMARTSCAN Smart Pushbroom Imaging System for Shaky Space Platforms Klaus Janschek, Valerij Tchernykh, Sergeij Dyblenko SMARTSCAN 1 SMARTSCAN Smart Pushbroom Imaging System for Shaky Space Platforms Klaus
SMARTSCAN Smart Pushbroom Imaging System for Shaky Space Platforms Klaus Janschek, Valerij Tchernykh, Sergeij Dyblenko SMARTSCAN 1 SMARTSCAN Smart Pushbroom Imaging System for Shaky Space Platforms Klaus
Active Stereo Vision. COMP 4102A Winter 2014 Gerhard Roth Version 1
 Active Stereo Vision COMP 4102A Winter 2014 Gerhard Roth Version 1 Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can
Active Stereo Vision COMP 4102A Winter 2014 Gerhard Roth Version 1 Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can
Localization in Wireless Sensor Networks
 Localization in Wireless Sensor Networks Part 2: Localization techniques Department of Informatics University of Oslo Cyber Physical Systems, 11.10.2011 Localization problem in WSN In a localization problem
Localization in Wireless Sensor Networks Part 2: Localization techniques Department of Informatics University of Oslo Cyber Physical Systems, 11.10.2011 Localization problem in WSN In a localization problem
LTE. Tester of laser range finders. Integrator Target slider. Transmitter channel. Receiver channel. Target slider Attenuator 2
 a) b) External Attenuators Transmitter LRF Receiver Transmitter channel Receiver channel Integrator Target slider Target slider Attenuator 2 Attenuator 1 Detector Light source Pulse gene rator Fiber attenuator
a) b) External Attenuators Transmitter LRF Receiver Transmitter channel Receiver channel Integrator Target slider Target slider Attenuator 2 Attenuator 1 Detector Light source Pulse gene rator Fiber attenuator
Keywords. DECCA, OMEGA, VOR, INS, Integrated systems
 Keywords. DECCA, OMEGA, VOR, INS, Integrated systems 7.4 DECCA Decca is also a position-fixing hyperbolic navigation system which uses continuous waves and phase measurements to determine hyperbolic lines-of
Keywords. DECCA, OMEGA, VOR, INS, Integrated systems 7.4 DECCA Decca is also a position-fixing hyperbolic navigation system which uses continuous waves and phase measurements to determine hyperbolic lines-of
Congress Best Paper Award
 Congress Best Paper Award Preprints of the 3rd IFAC Conference on Mechatronic Systems - Mechatronics 2004, 6-8 September 2004, Sydney, Australia, pp.547-552. OPTO-MECHATRONIC IMAE STABILIZATION FOR A COMPACT
Congress Best Paper Award Preprints of the 3rd IFAC Conference on Mechatronic Systems - Mechatronics 2004, 6-8 September 2004, Sydney, Australia, pp.547-552. OPTO-MECHATRONIC IMAE STABILIZATION FOR A COMPACT
Artificial Beacons with RGB-D Environment Mapping for Indoor Mobile Robot Localization
 Sensors and Materials, Vol. 28, No. 6 (2016) 695 705 MYU Tokyo 695 S & M 1227 Artificial Beacons with RGB-D Environment Mapping for Indoor Mobile Robot Localization Chun-Chi Lai and Kuo-Lan Su * Department
Sensors and Materials, Vol. 28, No. 6 (2016) 695 705 MYU Tokyo 695 S & M 1227 Artificial Beacons with RGB-D Environment Mapping for Indoor Mobile Robot Localization Chun-Chi Lai and Kuo-Lan Su * Department
Channel Modeling ETIN10. Wireless Positioning
 Channel Modeling ETIN10 Lecture no: 10 Wireless Positioning Fredrik Tufvesson Department of Electrical and Information Technology 2014-03-03 Fredrik Tufvesson - ETIN10 1 Overview Motivation: why wireless
Channel Modeling ETIN10 Lecture no: 10 Wireless Positioning Fredrik Tufvesson Department of Electrical and Information Technology 2014-03-03 Fredrik Tufvesson - ETIN10 1 Overview Motivation: why wireless
Measuring Distance Using Sound
 Measuring Distance Using Sound Distance can be measured in various ways: directly, using a ruler or measuring tape, or indirectly, using radio or sound waves. The indirect method measures another variable
Measuring Distance Using Sound Distance can be measured in various ways: directly, using a ruler or measuring tape, or indirectly, using radio or sound waves. The indirect method measures another variable
t =1 Transmitter #2 Figure 1-1 One Way Ranging Schematic
 1.0 Introduction OpenSource GPS is open source software that runs a GPS receiver based on the Zarlink GP2015 / GP2021 front end and digital processing chipset. It is a fully functional GPS receiver which
1.0 Introduction OpenSource GPS is open source software that runs a GPS receiver based on the Zarlink GP2015 / GP2021 front end and digital processing chipset. It is a fully functional GPS receiver which
Passive Microwave Sensors LIDAR Remote Sensing Laser Altimetry. 28 April 2003
 Passive Microwave Sensors LIDAR Remote Sensing Laser Altimetry 28 April 2003 Outline Passive Microwave Radiometry Rayleigh-Jeans approximation Brightness temperature Emissivity and dielectric constant
Passive Microwave Sensors LIDAR Remote Sensing Laser Altimetry 28 April 2003 Outline Passive Microwave Radiometry Rayleigh-Jeans approximation Brightness temperature Emissivity and dielectric constant
Intext Exercise 1 Question 1: How does the sound produced by a vibrating object in a medium reach your ear?
 Intext Exercise 1 How does the sound produced by a vibrating object in a medium reach your ear? When an vibrating object vibrates, it forces the neighbouring particles of the medium to vibrate. These vibrating
Intext Exercise 1 How does the sound produced by a vibrating object in a medium reach your ear? When an vibrating object vibrates, it forces the neighbouring particles of the medium to vibrate. These vibrating
Keywords: Ultrasonic Testing (UT), Air-coupled, Contact-free, Bond, Weld, Composites
, Air-coupled, Contact-free, Bond, Weld, Composites") Single-Sided Contact-Free Ultrasonic Testing A New Air-Coupled Inspection Technology for Weld and Bond Testing M. Kiel, R. Steinhausen, A. Bodi 1, and M. Lucas 1 Research Center for Ultrasonics - Forschungszentrum
Single-Sided Contact-Free Ultrasonic Testing A New Air-Coupled Inspection Technology for Weld and Bond Testing M. Kiel, R. Steinhausen, A. Bodi 1, and M. Lucas 1 Research Center for Ultrasonics - Forschungszentrum
GEO 428: DEMs from GPS, Imagery, & Lidar Tuesday, September 11
 GEO 428: DEMs from GPS, Imagery, & Lidar Tuesday, September 11 Global Positioning Systems GPS is a technology that provides Location coordinates Elevation For any location with a decent view of the sky
GEO 428: DEMs from GPS, Imagery, & Lidar Tuesday, September 11 Global Positioning Systems GPS is a technology that provides Location coordinates Elevation For any location with a decent view of the sky
Small and easy to mount IP67 rated. distance to target 1 Weather station monitoring
 4-20HR-MaxSonar -WR/WRC Series High Resolution, Precision, IP67 Weather Resistant, Ultrasonic Range Finders MB7460, MB7469, MB7480, MB7489 5 The 4-20HR-MaxSonar-WR sensor line is a high performance ultrasonic
4-20HR-MaxSonar -WR/WRC Series High Resolution, Precision, IP67 Weather Resistant, Ultrasonic Range Finders MB7460, MB7469, MB7480, MB7489 5 The 4-20HR-MaxSonar-WR sensor line is a high performance ultrasonic
Chapters 1 & 2. Definitions and applications Conceptual basis of photogrammetric processing
 Chapters 1 & 2 Chapter 1: Photogrammetry Definitions and applications Conceptual basis of photogrammetric processing Transition from two-dimensional imagery to three-dimensional information Automation
Chapters 1 & 2 Chapter 1: Photogrammetry Definitions and applications Conceptual basis of photogrammetric processing Transition from two-dimensional imagery to three-dimensional information Automation
Session2 Antennas and Propagation
 Wireless Communication Presented by Dr. Mahmoud Daneshvar Session2 Antennas and Propagation 1. Introduction Types of Anttenas Free space Propagation 2. Propagation modes 3. Transmission Problems 4. Fading
Wireless Communication Presented by Dr. Mahmoud Daneshvar Session2 Antennas and Propagation 1. Introduction Types of Anttenas Free space Propagation 2. Propagation modes 3. Transmission Problems 4. Fading
Quintic Hardware Tutorial Camera Set-Up
 Quintic Hardware Tutorial Camera Set-Up 1 All Quintic Live High-Speed cameras are specifically designed to meet a wide range of needs including coaching, performance analysis and research. Quintic LIVE
Quintic Hardware Tutorial Camera Set-Up 1 All Quintic Live High-Speed cameras are specifically designed to meet a wide range of needs including coaching, performance analysis and research. Quintic LIVE
Introduction Active microwave Radar
 RADAR Imaging Introduction 2 Introduction Active microwave Radar Passive remote sensing systems record electromagnetic energy that was reflected or emitted from the surface of the Earth. There are also
RADAR Imaging Introduction 2 Introduction Active microwave Radar Passive remote sensing systems record electromagnetic energy that was reflected or emitted from the surface of the Earth. There are also
Homework 10: Patent Liability Analysis
 Homework 10: Patent Liability Analysis Team Code Name: Autonomous Targeting Vehicle (ATV) Group No. 3 Team Member Completing This Homework: Anthony Myers E-mail Address of Team Member: myersar @ purdue.edu
Homework 10: Patent Liability Analysis Team Code Name: Autonomous Targeting Vehicle (ATV) Group No. 3 Team Member Completing This Homework: Anthony Myers E-mail Address of Team Member: myersar @ purdue.edu
Ultrasonic Level Detection Technology. ultra-wave
 Ultrasonic Level Detection Technology ultra-wave 1 Definitions Sound - The propagation of pressure waves through air or other media Medium - A material through which sound can travel Vacuum - The absence
Ultrasonic Level Detection Technology ultra-wave 1 Definitions Sound - The propagation of pressure waves through air or other media Medium - A material through which sound can travel Vacuum - The absence
Piezoceramic Ultrasound Transducer Enabling Broadband Transmission for 3D Scene Analysis in Air
 A2.2 Piezoceramic Ultrasound Transducer Enabling Broadband Transmission for 3D Scene Analysis in Air Kellner Johannes, Schweinzer Herbert Institute of Electrical Measurements and Circuit Design, Vienna
A2.2 Piezoceramic Ultrasound Transducer Enabling Broadband Transmission for 3D Scene Analysis in Air Kellner Johannes, Schweinzer Herbert Institute of Electrical Measurements and Circuit Design, Vienna
Chapter 13: Wave Propagation. EET-223: RF Communication Circuits Walter Lara
 Chapter 13: Wave Propagation EET-223: RF Communication Circuits Walter Lara Electrical to Electromagnetic Conversion Since the atmosphere is not a conductor of electrons (instead a good insulator), electrical
Chapter 13: Wave Propagation EET-223: RF Communication Circuits Walter Lara Electrical to Electromagnetic Conversion Since the atmosphere is not a conductor of electrons (instead a good insulator), electrical
Computer Networks Lecture -4- Transmission Media. Dr. Methaq Talib
 Computer Networks Lecture -4- Transmission Media Dr. Methaq Talib Transmission Media A transmission medium can be broadly defined as anything that can carry information from a source to a destination.
Computer Networks Lecture -4- Transmission Media Dr. Methaq Talib Transmission Media A transmission medium can be broadly defined as anything that can carry information from a source to a destination.
Chapter 21. Alternating Current Circuits and Electromagnetic Waves
 Chapter 21 Alternating Current Circuits and Electromagnetic Waves AC Circuit An AC circuit consists of a combination of circuit elements and an AC generator or source The output of an AC generator is sinusoidal
Chapter 21 Alternating Current Circuits and Electromagnetic Waves AC Circuit An AC circuit consists of a combination of circuit elements and an AC generator or source The output of an AC generator is sinusoidal
P3 Essential Questions X Rays, CT Scans and Ultrasound
 P3 Essential Questions X Rays, CT Scans and Ultrasound Ultrasound and X-rays are waves used in hospitals to create images of the inside of the human body. To produce the images below, the waves must enter
P3 Essential Questions X Rays, CT Scans and Ultrasound Ultrasound and X-rays are waves used in hospitals to create images of the inside of the human body. To produce the images below, the waves must enter
Conservation of energy during the reflection and transmission of microwaves
 Related topics Microwaves, electromagnetic waves, reflection, transmission, polarisation, conservation of energy, conservation laws Principle When electromagnetic waves impinge on an obstacle, reflection,
Related topics Microwaves, electromagnetic waves, reflection, transmission, polarisation, conservation of energy, conservation laws Principle When electromagnetic waves impinge on an obstacle, reflection,
Intro to Virtual Reality (Cont)
") Lecture 37: Intro to Virtual Reality (Cont) Computer Graphics and Imaging UC Berkeley CS184/284A Overview of VR Topics Areas we will discuss over next few lectures VR Displays VR Rendering VR Imaging CS184/284A
Lecture 37: Intro to Virtual Reality (Cont) Computer Graphics and Imaging UC Berkeley CS184/284A Overview of VR Topics Areas we will discuss over next few lectures VR Displays VR Rendering VR Imaging CS184/284A
Long range magnetic localization- accuracy and range study
 Journal of Physics: Conference Series OPEN ACCESS Long range magnetic localization- accuracy and range study To cite this article: J Vcelak et al 2013 J. Phys.: Conf. Ser. 450 012023 View the article online
Journal of Physics: Conference Series OPEN ACCESS Long range magnetic localization- accuracy and range study To cite this article: J Vcelak et al 2013 J. Phys.: Conf. Ser. 450 012023 View the article online
Agenda Motivation Systems and Sensors Algorithms Implementation Conclusion & Outlook
 Overview of Current Indoor Navigation Techniques and Implementation Studies FIG ww 2011 - Marrakech and Christian Lukianto HafenCity University Hamburg 21 May 2011 1 Agenda Motivation Systems and Sensors
Overview of Current Indoor Navigation Techniques and Implementation Studies FIG ww 2011 - Marrakech and Christian Lukianto HafenCity University Hamburg 21 May 2011 1 Agenda Motivation Systems and Sensors
Data and Computer Communications Chapter 4 Transmission Media
 Data and Computer Communications Chapter 4 Transmission Media Ninth Edition by William Stallings Data and Computer Communications, Ninth Edition by William Stallings, (c) Pearson Education - Prentice Hall,
Data and Computer Communications Chapter 4 Transmission Media Ninth Edition by William Stallings Data and Computer Communications, Ninth Edition by William Stallings, (c) Pearson Education - Prentice Hall,
EL6483: Sensors and Actuators
 EL6483: Sensors and Actuators EL6483 Spring 2016 EL6483 EL6483: Sensors and Actuators Spring 2016 1 / 15 Sensors Sensors measure signals from the external environment. Various types of sensors Variety
EL6483: Sensors and Actuators EL6483 Spring 2016 EL6483 EL6483: Sensors and Actuators Spring 2016 1 / 15 Sensors Sensors measure signals from the external environment. Various types of sensors Variety
Other Space Geodetic Techniques. E. Calais Purdue University - EAS Department Civil 3273
 Other Space Geodetic Techniques E. Calais Purdue University - EAS Department Civil 3273 ecalais@purdue.edu Satellite Laser Ranging = SLR Measurement of distance (=range) between a ground station and a
Other Space Geodetic Techniques E. Calais Purdue University - EAS Department Civil 3273 ecalais@purdue.edu Satellite Laser Ranging = SLR Measurement of distance (=range) between a ground station and a
Antennas and Propagation
 Antennas and Propagation Chapter 5 Introduction An antenna is an electrical conductor or system of conductors Transmission - radiates electromagnetic energy into space Reception - collects electromagnetic
Antennas and Propagation Chapter 5 Introduction An antenna is an electrical conductor or system of conductors Transmission - radiates electromagnetic energy into space Reception - collects electromagnetic
Lesson Title: Using Waves to Communicate Subject Grade Level Timeline. Physical Science minutes. Objectives
 Lesson Title: Using Waves to Communicate Subject Grade Level Timeline Physical Science 7-8 45 minutes Objectives This lesson investigates the difference between longitudinal waves and transverse waves,
Lesson Title: Using Waves to Communicate Subject Grade Level Timeline Physical Science 7-8 45 minutes Objectives This lesson investigates the difference between longitudinal waves and transverse waves,
Basics of Satellite Navigation an Elementary Introduction Prof. Dr. Bernhard Hofmann-Wellenhof Graz, University of Technology, Austria
 Basics of Satellite Navigation an Elementary Introduction Prof. Dr. Bernhard Hofmann-Wellenhof Graz, University of Technology, Austria Basic principles 1.1 Definitions Satellite geodesy (SG) comprises
Basics of Satellite Navigation an Elementary Introduction Prof. Dr. Bernhard Hofmann-Wellenhof Graz, University of Technology, Austria Basic principles 1.1 Definitions Satellite geodesy (SG) comprises