Autonomous Underwater Vehicles
|
|
|
- Marianna Gibson
- 6 years ago
- Views:
Transcription

1 Autonomous Underwater Vehicles New Autonomous Underwater Vehicle technology development at WHOI to support the growing needs of scientific, commercial and military undersea search and survey operations Tom Austin Sr. Engineer Woods Hole Oceanographic Institution




2 Oceanographic Systems Laboratory

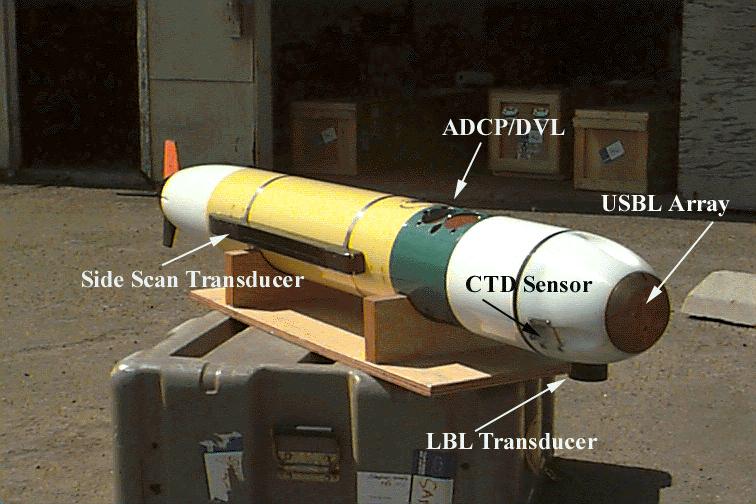
3 REMUS-100 Small, portable, low cost AUV capable of performing extended missions accurately and efficiently. >100 km maximum range with re-chargable batteries Self-navigating Numerous Sensors: Side Scan Sonar, conductivity, temperature, bathymetry, optics, water currents, bioluminescence, plankton camera, flourometer, radiometer, electronic still camera, video camera
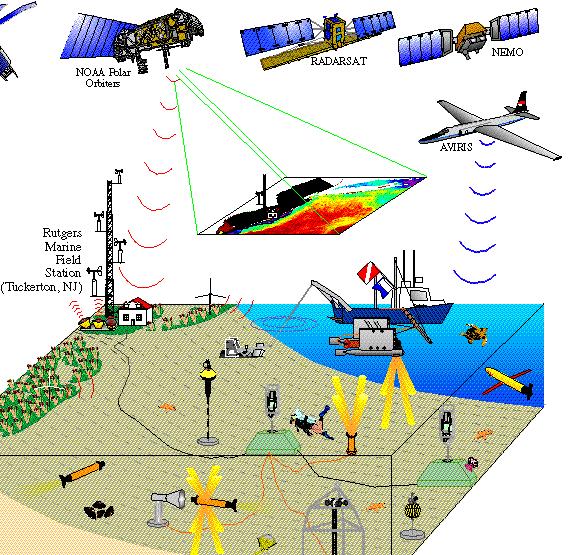
4 REMUS-100 Applications Coastal Oceanographic Surveys Very Shallow Water Mine Counter Measures (VSW-MCM) Pollution detection and monitoring Pipeline Inspection Undersea Search and Survey Homeland Security BIOMASS Survey REMUS AUTONOMOUS VEHICLE SYSTEM






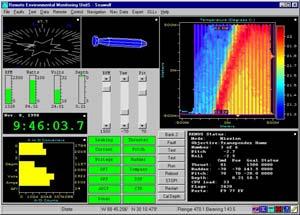
5 REMUS Data Products Sensor Data is available immediately upon recovery of the vehicle. Combining the sensor data with the navigation data provides instant two and three dimensional visualization of the environmental parameters measured by the vehicle.

6 REMUS-100 Total Turn-key Package REMUS Transponders Floats & Anchors REMUS Ranger GPS receiver Ruggedized laptop computer CD-ROM writer, blank CDs Power/Data Interface Cables Spares/Maintenance Kit Vehicle Stand
 path planning following a plume to its source Multiple Vehicle Operations: Up to four vehicles simultaneously in an area Navigation Acoustic LBL and USBL")
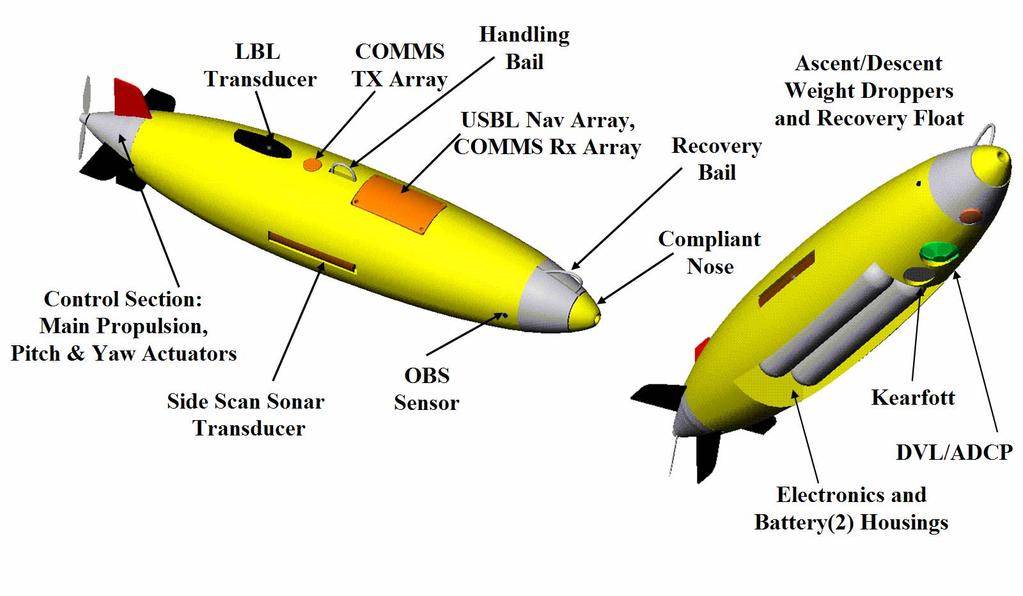
7 REMUS-100 Baseline Configuration 80 pound vehicle with18 hour mission duration at 3 knots Shipped via commercial overnight carrier Survey capabilities Both Search Classify and Map and Reacquire and Identify capabilities Adaptive (proactive) path planning following a plume to its source Multiple Vehicle Operations: Up to four vehicles simultaneously in an area Navigation Acoustic LBL and USBL navigation Optional ring-laser-gyro / Doppler DVL inertial navigation WAAS GPS Acoustic / Satellite Communication Mission redirection during deployment Survey data upload environmental data, sonar snippets (future) Upload of vehicle status to hand held unit in boat Payload Modules Docking, video imaging, forward look sonar, side scan sonar, profiling sonar, CTD, Bioluminescence, flourometer, radiometers, video plankton recorder, micro-structure turbulence.

8 REMUS Navigation Summary of Capabilities Long Baseline Transponder Navigation Used most often for survey work. Needs at least two transponders. Ultra-Short Baseline Transponder Nav. Used for homing, docking, and recovery. Only one transponder is required. Fix is based on range, bearing, and heading. Dead Reckoned Navigation Used to estimate position between acoustic fixes, or when transponders are not available. Based on lateral and axial velocities from ADCP, combined with heading from compass/rate gyro. Inertial navigator extends dead reckoned accuracy to approximately 5 meters per hour of error. USBL Nav LBL Nav DR Nav

9 REMUS Navigation LBL Navigation Performance Track-line following to well within 1 meter, Reliable Ranging to 2000 meters or more Cross Track Error, meters Unfiltered Position Data sample number x 10 4

10 REMUS Navigation USBL Navigation Performance Angular Resolution better than +/-.5 degrees including heading errors, Accuracy limited by compass error, typically 1-3 degrees. Reliable acquisition and tracking to 2000 meters. Worst case error at longest range

11 Gateway Buoy Allows for remote monitoring, tracking and control. Courtesy Hydroid, Inc.


12 AUV Fest 2003 found old test torpedo Unknown torpedo detected with sidescan Reacquired and imaged with DIDSON vehicle



13 New Antennas GPS, GPS/Iridium and Wi-Fi Rugged, compliant design Allows for over-thehorizon deployments Eliminates the need for transponders in some missions. Wi-fi greatly improves operational convenience


14 Kearfott RLG, Integrated with RDI ADCP Typically provides errors less than 4 m/hr. Allows for extended periods of navigation without acoustic or GPS fix. Phased Array ADCP reduces length and adds 600 khz for higher altitude bottom lock. New: Inertial Navigation and phased array ADCP


15 New: Video Camera Courtesy: Rich Arietta, SPAWAR


16 Ultra Short Base Line Docking Module Transducers Pre Amp Gain Filter Sync RS232 Guest Port Pre Amp Pre Amp Gain Gain Filter Filter A/D DSP Four Complex numbers to CPU for processing Pre Amp Gain Filter USBL Array Digital Transceiver Board Sync RS232 Array Electronics Array block diagram

17 Autonomous Reconnaissance, Surveillance, and Docking Demonstrations with Enhanced REMUS/SAHRV Technology Objectives To transition a field deployable selfpowered autonomous docking systems for the REMUS/SAHRV vehicle that will support long term reconnaissance operations in littoral waters To develop a periscope camera that will support harbor penetration missions Principal Investigators Christopher von Alt Thomas Austin Roger Stokey Woods Hole Oceanographic Institution Approach Develop system so that it may be deployed from an SDV, ASDS, RHIB, CRRC Develop the capability to perform harbor penetrations with periscope camera Developed the capability to perform 6-8 missions per fueling approximately 7 days of operation Develop field exchangeable battery packs that support refueling from SDV, CRRC, & AUV

18 REMUS-100 Operation Iraqi Freedom REMUS was used to search the Port of Um Qsar in preparation for the arrival of the Sir Galahad, a ship carrying humanitarian relief supplies.


19 AUV 2003 Multiple Vehicle Operations Crawler float MLO Crawlers Crawlers and multiple REMUS vehicles communicated without operator intervention One REMUS transmitted MLO locations; other assets acted on the information REMUS ESC vehicle self redirected over MLOs.


20 REMUS-6000 A deep ocean search and survey tool developed by WHOI for the Naval Oceanographic Office.

21 REMUS-6000 Stand-alone self contained 6 km rated system Includes vehicle, operations van, launch and recovery and ship support systems Developed in cooperation with NAVOCEANO and ONR Productive 6-10 times current survey rates with towed vehicles Affordable - Multiple vehicle operations (Two vehicles simultaneously)
22 REMUS-6000 Configuration
 Electronic Still")

23 Low Altitude Imaging (4 meters) Electronic Still Image, with 200 W-S strobe illumination 900 khz Side Scan


24 Sunken boat discovered at 3,500 meters depth 5 meter altitude electronic still image, with 200 W-S strobe illumination. 900 khz, 30 meter range scale sonar image


25 Sub-bottom profiler Parametric sonar developed by OMNI Technologies PFRS subbottom profile display crossing same fault feature. Vertical (altitude) and horizontal (distance along track) scales are shown in center and bottom of Image, respectively. The vertical red bars are the result of acoustic interference generated by the SAMS II acoustic modem.

26 Fault line detected SAMS II, MSN012, 300kHz Side Scan Image showing transit across fault.
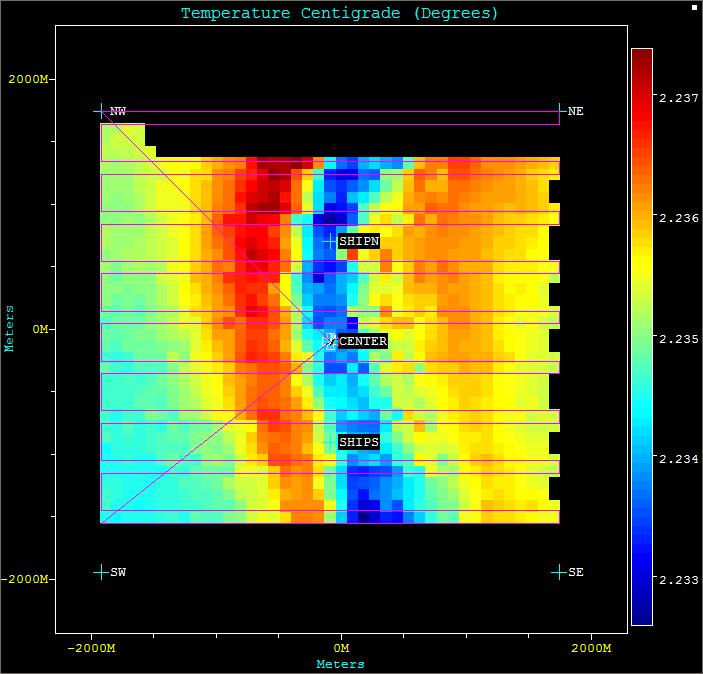
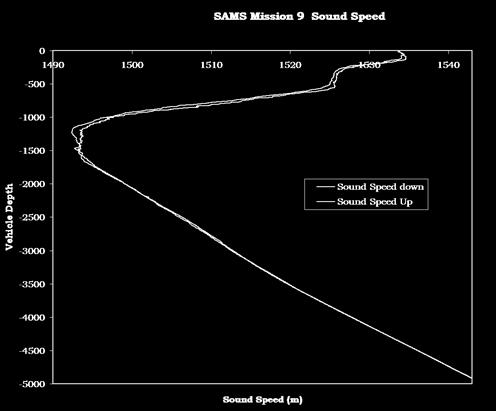
27 Temperature and Sound Speed Data

28 REMUS-6000 Launch and Recovery System

29 REMUS-600 exists

30 RF Systems GPS, Iridium, Wi-Fi

31 Italy 06

32 REMUS Development Team
A Shallow Water Acoustic Network for Mine Countermeasures Operations with Autonomous Underwater Vehicles
 A Shallow Water Acoustic Network for Mine Countermeasures Operations with Autonomous Underwater Vehicles Lee Freitag, Matthew Grund, Chris von Alt, Roger Stokey and Thomas Austin Woods Hole Oceanographic
A Shallow Water Acoustic Network for Mine Countermeasures Operations with Autonomous Underwater Vehicles Lee Freitag, Matthew Grund, Chris von Alt, Roger Stokey and Thomas Austin Woods Hole Oceanographic
Positioning Small AUVs for Deeper Water Surveys Using Inverted USBL
 Positioning Small AUVs for Deeper Water Surveys Using Inverted USBL Presented at Hydro12, Rotterdam, November 2012 Dr. T.M. Hiller, thiller@teledyne.com Overview Introduction to Gavia AUV Gavia Acoustic
Positioning Small AUVs for Deeper Water Surveys Using Inverted USBL Presented at Hydro12, Rotterdam, November 2012 Dr. T.M. Hiller, thiller@teledyne.com Overview Introduction to Gavia AUV Gavia Acoustic
Pipeline Inspection and Environmental Monitoring Using AUVs
 Pipeline Inspection and Environmental Monitoring Using AUVs Bjørn Jalving, Bjørn Gjelstad, Kongsberg Maritime AUV Workshop, IRIS Biomiljø, 7 8 September 2011 WORLD CLASS through people, technology and
Pipeline Inspection and Environmental Monitoring Using AUVs Bjørn Jalving, Bjørn Gjelstad, Kongsberg Maritime AUV Workshop, IRIS Biomiljø, 7 8 September 2011 WORLD CLASS through people, technology and
Experiences with Hydrographic Data Budgets Using a Low-logistics AUV Platform. Thomas Hiller Teledyne Marine Systems
 Experiences with Hydrographic Data Budgets Using a Low-logistics AUV Platform Thomas Hiller Teledyne Marine Systems 1 Teledyne Marine Systems Strategic Business Units 2 What is the Gavia? The Gavia is
Experiences with Hydrographic Data Budgets Using a Low-logistics AUV Platform Thomas Hiller Teledyne Marine Systems 1 Teledyne Marine Systems Strategic Business Units 2 What is the Gavia? The Gavia is
Robots at Work The growing role of robotic systems in the Oceans and Subsea Engineering. David Brookes Senior Advisor, Upstream Engineering, BP
 Robots at Work The growing role of robotic systems in the Oceans and Subsea Engineering David Brookes Senior Advisor, Upstream Engineering, BP Synopsis ROV s History Current Capabilities and Examples AUV
Robots at Work The growing role of robotic systems in the Oceans and Subsea Engineering David Brookes Senior Advisor, Upstream Engineering, BP Synopsis ROV s History Current Capabilities and Examples AUV
Survey Sensors. 18/04/2018 Danny Wake Group Surveyor i-tech Services
 Survey Sensors 18/04/2018 Danny Wake Group Surveyor i-tech Services What do we need sensors for? For pure hydrographic surveying: Depth measurements Hazard identification Seabed composition Tides & currents
Survey Sensors 18/04/2018 Danny Wake Group Surveyor i-tech Services What do we need sensors for? For pure hydrographic surveying: Depth measurements Hazard identification Seabed composition Tides & currents
USBL positioning and communication SyStEmS. product information GUidE
 USBL positioning and communication SyStEmS product information GUidE evologics s2c R usbl - series underwater positioning and communication systems EvoLogics S2CR USBL is a series of combined positioning
USBL positioning and communication SyStEmS product information GUidE evologics s2c R usbl - series underwater positioning and communication systems EvoLogics S2CR USBL is a series of combined positioning
LBL POSITIONING AND COMMUNICATION SYSTEMS PRODUCT INFORMATION GUIDE
 LBL POSITIONING AND COMMUNICATION SYSTEMS PRODUCT INFORMATION GUIDE EvoLogics S2C LBL Underwater Positioning and Communication Systems EvoLogics LBL systems bring the benefi ts of long baseline (LBL) acoustic
LBL POSITIONING AND COMMUNICATION SYSTEMS PRODUCT INFORMATION GUIDE EvoLogics S2C LBL Underwater Positioning and Communication Systems EvoLogics LBL systems bring the benefi ts of long baseline (LBL) acoustic
Integrity Monitoring using AUVs
 Integrity Monitoring using AUVs Andrew McMurtrie Business Development Manager NCS Survey Limited Subsea Europe, 27-28 October, in Paris Content Introduction to NCS Survey Low logistics, man-portable AUVs
Integrity Monitoring using AUVs Andrew McMurtrie Business Development Manager NCS Survey Limited Subsea Europe, 27-28 October, in Paris Content Introduction to NCS Survey Low logistics, man-portable AUVs
Experimental Validation of the Moving Long Base-Line Navigation Concept
 Experimental Validation of the Moving Long Base-Line Navigation Concept Jérôme Vaganay (1), John J. Leonard (2), Joseph A. Curcio (2), J. Scott Willcox (1) (1) Bluefin Robotics Corporation 237 Putnam Avenue
Experimental Validation of the Moving Long Base-Line Navigation Concept Jérôme Vaganay (1), John J. Leonard (2), Joseph A. Curcio (2), J. Scott Willcox (1) (1) Bluefin Robotics Corporation 237 Putnam Avenue
EIS - Electronics Instrumentation Systems for Marine Applications
 Coordinating unit: Teaching unit: Academic year: Degree: ECTS credits: 2015 230 - ETSETB - Barcelona School of Telecommunications Engineering 710 - EEL - Department of Electronic Engineering MASTER'S DEGREE
Coordinating unit: Teaching unit: Academic year: Degree: ECTS credits: 2015 230 - ETSETB - Barcelona School of Telecommunications Engineering 710 - EEL - Department of Electronic Engineering MASTER'S DEGREE
Multi-Band Acoustic Modem for the Communications and Navigation Aid AUV
 Multi-Band Acoustic Modem for the Communications and Navigation Aid AUV Lee E. Freitag, Matthew Grund, Jim Partan, Keenan Ball, Sandipa Singh, Peter Koski Woods Hole Oceanographic Institution Woods Hole,
Multi-Band Acoustic Modem for the Communications and Navigation Aid AUV Lee E. Freitag, Matthew Grund, Jim Partan, Keenan Ball, Sandipa Singh, Peter Koski Woods Hole Oceanographic Institution Woods Hole,
Cooperative AUV Navigation using MOOS: MLBL Maurice Fallon and John Leonard
 Cooperative AUV Navigation using MOOS: MLBL Maurice Fallon and John Leonard Cooperative ASV/AUV Navigation AUV Navigation is not error bounded: Even with a $300k RLG, error will accumulate GPS and Radio
Cooperative AUV Navigation using MOOS: MLBL Maurice Fallon and John Leonard Cooperative ASV/AUV Navigation AUV Navigation is not error bounded: Even with a $300k RLG, error will accumulate GPS and Radio
Applications of iusbl Technology overview
 Applications of iusbl Technology overview Tom Bennetts Project Manager Summary 1. What is iusbl and its target applications 2. Advantages of iusbl and sample data 3. Technical hurdles and Calibration methods
Applications of iusbl Technology overview Tom Bennetts Project Manager Summary 1. What is iusbl and its target applications 2. Advantages of iusbl and sample data 3. Technical hurdles and Calibration methods
USBL positioning and communication systems. Applications
 USBL positioning and communication systems Offering a powerful USBL transceiver functionality with full benefits of an S2C technology communication link Applications Positioning of offshore equipment >
USBL positioning and communication systems Offering a powerful USBL transceiver functionality with full benefits of an S2C technology communication link Applications Positioning of offshore equipment >
Acoustic Communications and Navigation for Mobile Under-Ice Sensors
 DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Acoustic Communications and Navigation for Mobile Under-Ice Sensors Lee Freitag Applied Ocean Physics and Engineering 266
DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Acoustic Communications and Navigation for Mobile Under-Ice Sensors Lee Freitag Applied Ocean Physics and Engineering 266
Sensor-based Motion Planning for MCM Teams. by Sean Kragelund Center for Autonomous Vehicle Research (CAVR)
") Sensor-based Motion Planning for MCM Teams by Sean Kragelund Center for Autonomous Vehicle Research (CAVR) October 5, 2015 Sensor-based Planning GOAL: optimize some mission objective Max. information gain
Sensor-based Motion Planning for MCM Teams by Sean Kragelund Center for Autonomous Vehicle Research (CAVR) October 5, 2015 Sensor-based Planning GOAL: optimize some mission objective Max. information gain
Teledyne Marine Acoustic Imagining
 RESON SeaBat high performance sonars for long range object detection and MCM applications Navigation, object avoidance & up close inspection with BlueView Greg Probst Sales Manager, Defense Teledyne Marine
RESON SeaBat high performance sonars for long range object detection and MCM applications Navigation, object avoidance & up close inspection with BlueView Greg Probst Sales Manager, Defense Teledyne Marine
SUB-SEABED MAPPING USING AUV-BASED MULTI-STATIC ACOUSTIC SENSING AND ADAPTIVE CONTROL
 SUB-SEABED MAPPING USING AUV-BASED MULTI-STATIC ACOUSTIC SENSING AND ADAPTIVE CONTROL H. SCHMIDT, J. LEONARD, J.R. EDWARDS AND T-C. LIU Massachusetts Institute of Technology, 77 Massachusetts Avenue, Cambridge
SUB-SEABED MAPPING USING AUV-BASED MULTI-STATIC ACOUSTIC SENSING AND ADAPTIVE CONTROL H. SCHMIDT, J. LEONARD, J.R. EDWARDS AND T-C. LIU Massachusetts Institute of Technology, 77 Massachusetts Avenue, Cambridge
MINE SEARCH MISSION PLANNING FOR HIGH DEFINITION SONAR SYSTEM - SELECTION OF SPACE IMAGING EQUIPMENT FOR A SMALL AUV DOROTA ŁUKASZEWICZ, LECH ROWIŃSKI
 MINE SEARCH MISSION PLANNING FOR HIGH DEFINITION SONAR SYSTEM - SELECTION OF SPACE IMAGING EQUIPMENT FOR A SMALL AUV DOROTA ŁUKASZEWICZ, LECH ROWIŃSKI Gdansk University of Technology Faculty of Ocean Engineering
MINE SEARCH MISSION PLANNING FOR HIGH DEFINITION SONAR SYSTEM - SELECTION OF SPACE IMAGING EQUIPMENT FOR A SMALL AUV DOROTA ŁUKASZEWICZ, LECH ROWIŃSKI Gdansk University of Technology Faculty of Ocean Engineering
PHINS, An All-In-One Sensor for DP Applications
 DYNAMIC POSITIONING CONFERENCE September 28-30, 2004 Sensors PHINS, An All-In-One Sensor for DP Applications Yves PATUREL IXSea (Marly le Roi, France) ABSTRACT DP positioning sensors are mainly GPS receivers
DYNAMIC POSITIONING CONFERENCE September 28-30, 2004 Sensors PHINS, An All-In-One Sensor for DP Applications Yves PATUREL IXSea (Marly le Roi, France) ABSTRACT DP positioning sensors are mainly GPS receivers
SYSTEM 5900 SIDE SCAN SONAR
 SYSTEM 5900 SIDE SCAN SONAR HIGH-RESOLUTION, DYNAMICALLY FOCUSED, MULTI-BEAM SIDE SCAN SONAR Klein Marine System s 5900 sonar is the flagship in our exclusive family of multi-beam technology-based side
SYSTEM 5900 SIDE SCAN SONAR HIGH-RESOLUTION, DYNAMICALLY FOCUSED, MULTI-BEAM SIDE SCAN SONAR Klein Marine System s 5900 sonar is the flagship in our exclusive family of multi-beam technology-based side
James Bellingham. Marine Robotics
 James Bellingham Marine Robotics Robotic systems are transforming the ocean sciences. Marine Robotics - Teleoperation In the 1990s, WHOI was one of a few organizations with deep-diving Remotely Operated
James Bellingham Marine Robotics Robotic systems are transforming the ocean sciences. Marine Robotics - Teleoperation In the 1990s, WHOI was one of a few organizations with deep-diving Remotely Operated
Underwater Acoustic Communication and Positioning State of the Art and New Uses
 Underwater Acoustic Communication and Positioning State of the Art and New Uses Radio signals Work only on very short distances Salty water particularly problematic No underwater GPS Cables Too heavy,
Underwater Acoustic Communication and Positioning State of the Art and New Uses Radio signals Work only on very short distances Salty water particularly problematic No underwater GPS Cables Too heavy,
Underwater Acoustic Communication and Modem-Based Navigation Aids
 Underwater Acoustic Communication and Modem-Based Navigation Aids Dale Green Teledyne Benthos 49 Edgerton Drive North Falmouth, MA 02556 USA Abstract. New forms of navigation aids for underwater vehicles
Underwater Acoustic Communication and Modem-Based Navigation Aids Dale Green Teledyne Benthos 49 Edgerton Drive North Falmouth, MA 02556 USA Abstract. New forms of navigation aids for underwater vehicles
08/10/2013. Marine Positioning Systems Surface and Underwater Positioning. egm502 seafloor mapping
 egm502 seafloor mapping lecture 8 navigation and positioning Marine Positioning Systems Surface and Underwater Positioning All observations at sea need to be related to a geographical position. To precisely
egm502 seafloor mapping lecture 8 navigation and positioning Marine Positioning Systems Surface and Underwater Positioning All observations at sea need to be related to a geographical position. To precisely
Solutions for a blue planet
 Solutions for a blue planet Optimising the businesses of offshore and shallow water professionals with sustainability as our beacon The world is seeing a steady increase in operations at sea in the energy,
Solutions for a blue planet Optimising the businesses of offshore and shallow water professionals with sustainability as our beacon The world is seeing a steady increase in operations at sea in the energy,
New GENERATION ACOUSTIC. single solution for all underwater communication needs.
 MATS 3G // New GENERATION ACOUSTIC TELEMETRY SYSTEM MATS 3G is an underwater acoustic modem that offers a single solution for all underwater communication needs. Its state-of-the-art DSP (Digital Signal
MATS 3G // New GENERATION ACOUSTIC TELEMETRY SYSTEM MATS 3G is an underwater acoustic modem that offers a single solution for all underwater communication needs. Its state-of-the-art DSP (Digital Signal
Ranger USBL Acoustic Positioning System for DP Reference and Survey
 Acoustic Positioning System for DP Reference and Survey cc 545000m N 544990m 544980m 544970m 6027910m 6027900m W 6027890m 6027880m S Contents Introduction 01 Ranger USBL System Overview 02 Ranger USBL
Acoustic Positioning System for DP Reference and Survey cc 545000m N 544990m 544980m 544970m 6027910m 6027900m W 6027890m 6027880m S Contents Introduction 01 Ranger USBL System Overview 02 Ranger USBL
Teledyne Oil & Gas Innovation and Subsea Reliability
 A Member of Innovation and Subsea Reliability www.teledyneoilandgas.com Technologies A Member of Seismic Instruments Imaging Vehicles Photo Courtesy BMT has been proudly serving the oil and gas industry
A Member of Innovation and Subsea Reliability www.teledyneoilandgas.com Technologies A Member of Seismic Instruments Imaging Vehicles Photo Courtesy BMT has been proudly serving the oil and gas industry
Subsea Positioning In deep water
 Subsea Positioning In deep water PETRONAS - PETRAD - INTSOK CCOP DEEPWATER SUBSEA TIE-BACK Damai Puri Resort & Spa, Kuching, Sarawak, MALAYSIA 24TH - 26TH January, 2011 Supplier to the oil & gas industry
Subsea Positioning In deep water PETRONAS - PETRAD - INTSOK CCOP DEEPWATER SUBSEA TIE-BACK Damai Puri Resort & Spa, Kuching, Sarawak, MALAYSIA 24TH - 26TH January, 2011 Supplier to the oil & gas industry
SONOBOT AUTONOMOUS HYDROGRAPHIC SURVEY VEHICLE PRODUCT INFORMATION GUIDE
 SONOBOT AUTONOMOUS HYDROGRAPHIC SURVEY VEHICLE PRODUCT INFORMATION GUIDE EvoLogics Sonobot an autonomous unmanned surface vehicle for hydrographic surveys High Precision Differential GPS for high-accuracy
SONOBOT AUTONOMOUS HYDROGRAPHIC SURVEY VEHICLE PRODUCT INFORMATION GUIDE EvoLogics Sonobot an autonomous unmanned surface vehicle for hydrographic surveys High Precision Differential GPS for high-accuracy
Hybrid system using both USBL and LBL for shallow waters
 OI2013 Underwater Positioning & Communication Hybrid system using both USBL and LBL for shallow waters Nicolas LARUELLE Sales Manager at OSEAN September 4th,2013 OI2013 Page 1 OVERVIEW SPECIFICATIONS PRINCIPLES
OI2013 Underwater Positioning & Communication Hybrid system using both USBL and LBL for shallow waters Nicolas LARUELLE Sales Manager at OSEAN September 4th,2013 OI2013 Page 1 OVERVIEW SPECIFICATIONS PRINCIPLES
Kordil Surveying & Engineering Services
 Kordil Surveying & Engineering Services About Kordil Kordil Surveying & Engineering Ltd. Co. in short Kordil is an all in one surveying company providing service from Turkey. Hydrography, Oceanography
Kordil Surveying & Engineering Services About Kordil Kordil Surveying & Engineering Ltd. Co. in short Kordil is an all in one surveying company providing service from Turkey. Hydrography, Oceanography
Tritech International Vehicle Sonar Developments
 Tritech International Vehicle Sonar Developments Mike Broadbent Business Development Manager Oceanology 2012 - UUVS Overview About Tritech Mechanical Scanning Sonar - Improving the performance High Speed
Tritech International Vehicle Sonar Developments Mike Broadbent Business Development Manager Oceanology 2012 - UUVS Overview About Tritech Mechanical Scanning Sonar - Improving the performance High Speed
Acoustic Communications and Navigation for Mobile Under-Ice Sensors
 DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Acoustic Communications and Navigation for Mobile Under-Ice Sensors Lee Freitag Applied Ocean Physics and Engineering 266
DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Acoustic Communications and Navigation for Mobile Under-Ice Sensors Lee Freitag Applied Ocean Physics and Engineering 266
The Oil & Gas Industry Requirements for Marine Robots of the 21st century
 The Oil & Gas Industry Requirements for Marine Robots of the 21st century www.eninorge.no Laura Gallimberti 20.06.2014 1 Outline Introduction: fast technology growth Overview underwater vehicles development
The Oil & Gas Industry Requirements for Marine Robots of the 21st century www.eninorge.no Laura Gallimberti 20.06.2014 1 Outline Introduction: fast technology growth Overview underwater vehicles development
Applications. > > Oil & Gas. > > RoVs and auvs. > > Oceanography. > > Monitoring stations. > > Seismic. > > Networks and relay chains
 Underwater acoustic Modems EvoLogics S2CR - series underwater acoustic modems provide full-duplex digital communication delivering an excellent performance, resistant to the challenges of the dynamic subsea
Underwater acoustic Modems EvoLogics S2CR - series underwater acoustic modems provide full-duplex digital communication delivering an excellent performance, resistant to the challenges of the dynamic subsea
AUV Self-Localization Using a Tetrahedral Array and Passive Acoustics
 AUV Self-Localization Using a Tetrahedral Array and Passive Acoustics Nicholas R. Rypkema Erin M. Fischell Henrik Schmidt Background - Motivation Motivation: Accurate localization for miniature, low-cost
AUV Self-Localization Using a Tetrahedral Array and Passive Acoustics Nicholas R. Rypkema Erin M. Fischell Henrik Schmidt Background - Motivation Motivation: Accurate localization for miniature, low-cost
Construction Survey Positioning Systems Wideband Fusion LBL and USBL
 cc Construction Survey Positioning Systems Wideband Fusion LBL and USBL Contents Introduction 01 Fusion USBL 02 Fusion USBL System Specifications 05 Fusion LBL 06 Fusion LBL System Specifications 09 Precise,
cc Construction Survey Positioning Systems Wideband Fusion LBL and USBL Contents Introduction 01 Fusion USBL 02 Fusion USBL System Specifications 05 Fusion LBL 06 Fusion LBL System Specifications 09 Precise,
ACOUSTIC RESEARCH FOR PORT PROTECTION AT THE STEVENS MARITIME SECURITY LABORATORY
 ACOUSTIC RESEARCH FOR PORT PROTECTION AT THE STEVENS MARITIME SECURITY LABORATORY Alexander Sutin, Barry Bunin Stevens Institute of Technology, Castle Point on Hudson, Hoboken, NJ 07030, United States
ACOUSTIC RESEARCH FOR PORT PROTECTION AT THE STEVENS MARITIME SECURITY LABORATORY Alexander Sutin, Barry Bunin Stevens Institute of Technology, Castle Point on Hudson, Hoboken, NJ 07030, United States
Uncertainty-Based Localization Solution for Under-Ice Autonomous Underwater Vehicles
 Uncertainty-Based Localization Solution for Under-Ice Autonomous Underwater Vehicles Presenter: Baozhi Chen Baozhi Chen and Dario Pompili Cyber-Physical Systems Lab ECE Department, Rutgers University baozhi_chen@cac.rutgers.edu
Uncertainty-Based Localization Solution for Under-Ice Autonomous Underwater Vehicles Presenter: Baozhi Chen Baozhi Chen and Dario Pompili Cyber-Physical Systems Lab ECE Department, Rutgers University baozhi_chen@cac.rutgers.edu
SeaWATCH ADCP. Self-Contained 300 khz / 600 khz / 1200 khz
 SeaWATCH ADCP Self-Contained 300 khz / 600 khz / 1200 khz The Rowe Technologies SeaWATCH product family is the most versatile self-contained Acoustic Doppler Current Profilers (ADCPs) and represent the
SeaWATCH ADCP Self-Contained 300 khz / 600 khz / 1200 khz The Rowe Technologies SeaWATCH product family is the most versatile self-contained Acoustic Doppler Current Profilers (ADCPs) and represent the
Hydroacoustic Aided Inertial Navigation System - HAIN A New Reference for DP
 Return to Session Directory Return to Session Directory Doug Phillips Failure is an Option DYNAMIC POSITIONING CONFERENCE October 9-10, 2007 Sensors Hydroacoustic Aided Inertial Navigation System - HAIN
Return to Session Directory Return to Session Directory Doug Phillips Failure is an Option DYNAMIC POSITIONING CONFERENCE October 9-10, 2007 Sensors Hydroacoustic Aided Inertial Navigation System - HAIN
SIS-1624 Dual Frequency Side Scan
 The Teledyne Benthos SIS-1624 Series Side Scan Sonar is a fully integrated system that uses advanced Chirp and Continuous Wave (CW) technologies, dual frequency and an advanced highspeed communication
The Teledyne Benthos SIS-1624 Series Side Scan Sonar is a fully integrated system that uses advanced Chirp and Continuous Wave (CW) technologies, dual frequency and an advanced highspeed communication
RDT&E BUDGET ITEM JUSTIFICATION SHEET (R-2 Exhibit)
") , R-1 #49 COST (In Millions) FY 2000 FY2001 FY2002 FY2003 FY2004 FY2005 FY2006 FY2007 Cost To Complete Total Cost Total Program Element (PE) Cost 21.845 27.937 41.497 31.896 45.700 57.500 60.200 72.600
, R-1 #49 COST (In Millions) FY 2000 FY2001 FY2002 FY2003 FY2004 FY2005 FY2006 FY2007 Cost To Complete Total Cost Total Program Element (PE) Cost 21.845 27.937 41.497 31.896 45.700 57.500 60.200 72.600
Progress Report. Mohammadtaghi G. Poshtmashhadi. Supervisor: Professor António M. Pascoal
 Progress Report Mohammadtaghi G. Poshtmashhadi Supervisor: Professor António M. Pascoal OceaNet meeting presentation April 2017 2 Work program Main Research Topic Autonomous Marine Vehicle Control and
Progress Report Mohammadtaghi G. Poshtmashhadi Supervisor: Professor António M. Pascoal OceaNet meeting presentation April 2017 2 Work program Main Research Topic Autonomous Marine Vehicle Control and
Seafloor Mapping Using Interferometric Sonars: Advances in Technology and Techniques
 Seafloor Mapping Using Interferometric Sonars: Advances in Technology and Techniques Tom Hiller, Advanced Products Manager, GeoAcoustics Ltd. WORLD CLASS through people, technology and dedication Brest,
Seafloor Mapping Using Interferometric Sonars: Advances in Technology and Techniques Tom Hiller, Advanced Products Manager, GeoAcoustics Ltd. WORLD CLASS through people, technology and dedication Brest,
INS for life of field
 INS for life of field Mark Carter Business Development Manager : Inertial Oceanology 2012 Positioning Requirements Drilling Construction Pipe Lay IRM Decommissioning Rig DP (Dual Redundant) Site Survey
INS for life of field Mark Carter Business Development Manager : Inertial Oceanology 2012 Positioning Requirements Drilling Construction Pipe Lay IRM Decommissioning Rig DP (Dual Redundant) Site Survey
1 Introduction integrated 3D sonar system for underwater inspection applications
 1 Introduction The Underwater Inspection System (UIS TM ) is an integrated 3D sonar system for underwater inspection applications, specifically port and harbor construction, maintenance, port expansion,
1 Introduction The Underwater Inspection System (UIS TM ) is an integrated 3D sonar system for underwater inspection applications, specifically port and harbor construction, maintenance, port expansion,
Blair. Ballard. MIT Adviser: Art Baggeroer. WHOI Adviser: James Preisig. Ballard
 Are Acoustic Communications the Right Answer? bjblair@ @mit.edu April 19, 2007 WHOI Adviser: James Preisig MIT Adviser: Art Baggeroer 1 Background BS in Electrical and Co omputer Engineering, Cornell university
Are Acoustic Communications the Right Answer? bjblair@ @mit.edu April 19, 2007 WHOI Adviser: James Preisig MIT Adviser: Art Baggeroer 1 Background BS in Electrical and Co omputer Engineering, Cornell university
Author s Name Name of the Paper Session. PDynamic. Positioning Committee. Marine Technology Society
 Author s Name Name of the Paper Session PDynamic Positioning Committee Marine Technology Society DYNAMIC POSITIONING CONFERENCE September 17-18, 2002 Acoustic Positioning Flexible Acoustic Positioning
Author s Name Name of the Paper Session PDynamic Positioning Committee Marine Technology Society DYNAMIC POSITIONING CONFERENCE September 17-18, 2002 Acoustic Positioning Flexible Acoustic Positioning
Observations of the deep-water mid-frequency ambient noise spatial structure and temporal fluctuation characteristics.
 Mid-Frequency Ambient Noise Experiment 4-21 August 2018 Objective Observations of the deep-water mid-frequency ambient noise spatial structure and temporal fluctuation characteristics. Background The 2D
Mid-Frequency Ambient Noise Experiment 4-21 August 2018 Objective Observations of the deep-water mid-frequency ambient noise spatial structure and temporal fluctuation characteristics. Background The 2D
The Acoustic Oceanographic Buoy Telemetry System
 The Acoustic Oceanographic Buoy Telemetry System An advanced sonobuoy that meets acoustic rapid environmental assessment requirements {A. Silva, F. Zabel, C. Martins} In the past few years Rapid Environmental
The Acoustic Oceanographic Buoy Telemetry System An advanced sonobuoy that meets acoustic rapid environmental assessment requirements {A. Silva, F. Zabel, C. Martins} In the past few years Rapid Environmental
Subsea Monitoring & Mapping
 Subsea Monitoring & Mapping Arnold Hechanova & Dave Fraser ITAC Meeting 2016 Woods Hole Oceanographic Institute, MA Overview Program Objective: Develop sensors to detect loss of containment subsea and
Subsea Monitoring & Mapping Arnold Hechanova & Dave Fraser ITAC Meeting 2016 Woods Hole Oceanographic Institute, MA Overview Program Objective: Develop sensors to detect loss of containment subsea and
global acoustic positioning system GAPS usbl acoustic with integrated INS positioning system Ixsea Oceano GAPS page 1
 global acoustic positioning system usbl acoustic positioning system with integrated INS positioning system page 1 THE MERGER OF INERTIAL AND UNDERWATER ACOUSTIC TECHNOLOGIES is a unique Global Acoustic
global acoustic positioning system usbl acoustic positioning system with integrated INS positioning system page 1 THE MERGER OF INERTIAL AND UNDERWATER ACOUSTIC TECHNOLOGIES is a unique Global Acoustic
Cooperative navigation: outline
 Positioning and Navigation in GPS-challenged Environments: Cooperative Navigation Concept Dorota A Grejner-Brzezinska, Charles K Toth, Jong-Ki Lee and Xiankun Wang Satellite Positioning and Inertial Navigation
Positioning and Navigation in GPS-challenged Environments: Cooperative Navigation Concept Dorota A Grejner-Brzezinska, Charles K Toth, Jong-Ki Lee and Xiankun Wang Satellite Positioning and Inertial Navigation
Seaweb as a DTN pilot application
 IETF Meeting, DTNRG session 2006 March 24 as a DTN pilot application Joseph A. Rice SPAWAR Systems Center, San Diego Naval Postgraduate School, Monterey +1 831 402 5666 rice@nps.edu is a US Navy developmental
IETF Meeting, DTNRG session 2006 March 24 as a DTN pilot application Joseph A. Rice SPAWAR Systems Center, San Diego Naval Postgraduate School, Monterey +1 831 402 5666 rice@nps.edu is a US Navy developmental
WORLD CLASS through people, technology and dedication WORLD CLASS through people, technology and dedication
 WORLD CLASS through people, technology and dedication WORLD CLASS through people, technology and dedication 1 2 Acoustic Positioning Systems Hydrofest Aberdeen University Wednesday 31 st March Ian Florence
WORLD CLASS through people, technology and dedication WORLD CLASS through people, technology and dedication 1 2 Acoustic Positioning Systems Hydrofest Aberdeen University Wednesday 31 st March Ian Florence
Low Frequency Coherent Source Sonobuoy
 Low Frequency Coherent Source Sonobuoy Active Source The Low Frequency Coherent Source (LFCS) is NATO, A-size sonobuoy manufactured by STS for use as a source in a multi-static field. The LFCS is capable
Low Frequency Coherent Source Sonobuoy Active Source The Low Frequency Coherent Source (LFCS) is NATO, A-size sonobuoy manufactured by STS for use as a source in a multi-static field. The LFCS is capable
Research Vessel Technical Enhancement Committee (RVTEC) November 2009 Meeting ISS - Integrated Survey Systems
 November 2009 Meeting ISS - Integrated Survey Systems") Research Vessel Technical Enhancement Committee (RVTEC) November 2009 Meeting ISS - Integrated Survey Systems John Kiernan, P.E. SAIC - Marine Science and Technology Division ISS-2000 Integrated Survey
Research Vessel Technical Enhancement Committee (RVTEC) November 2009 Meeting ISS - Integrated Survey Systems John Kiernan, P.E. SAIC - Marine Science and Technology Division ISS-2000 Integrated Survey
Teledyne Marine Oil and Gas.
 Oil and Gas www.teledynemarine.com/energy Applications in Oil and Gas Teledyne Marine encompasses over 20 brands that offer innovative, highly reliable technology spanning the life cycle of an oil field,
Oil and Gas www.teledynemarine.com/energy Applications in Oil and Gas Teledyne Marine encompasses over 20 brands that offer innovative, highly reliable technology spanning the life cycle of an oil field,
SONOBOT AUTONOMOUS HYDROGRAPHIC SURVEY VEHICLE PRODUCT INFORMATION GUIDE
 SONOBOT AUTONOMOUS HYDROGRAPHIC SURVEY VEHICLE PRODUCT INFORMATION GUIDE EvoLogics SONOBOT: Autonomous Surface Vehicle for Hydrographic Surveys High Precision Differential GPS for high-accuracy cartography
SONOBOT AUTONOMOUS HYDROGRAPHIC SURVEY VEHICLE PRODUCT INFORMATION GUIDE EvoLogics SONOBOT: Autonomous Surface Vehicle for Hydrographic Surveys High Precision Differential GPS for high-accuracy cartography
Underwater Vehicle Systems at IFREMER. From R&D to operational systems. Jan Opderbecke IFREMER Unit for Underwater Systems
 Underwater Vehicle Systems at IFREMER From R&D to operational systems Jan Opderbecke IFREMER Unit for Underwater Systems Operational Engineering Mechanical and systems engineering Marine robotics, mapping,
Underwater Vehicle Systems at IFREMER From R&D to operational systems Jan Opderbecke IFREMER Unit for Underwater Systems Operational Engineering Mechanical and systems engineering Marine robotics, mapping,
ARCHIVED REPORT. Marine Technology - Archived 7/2005
 Land & Sea-Based Electronics Forecast ARCHIVED REPORT For data and forecasts on current programs please visit www.forecastinternational.com or call +1 203.426.0800 Marine Technology - Archived 7/2005 Outlook
Land & Sea-Based Electronics Forecast ARCHIVED REPORT For data and forecasts on current programs please visit www.forecastinternational.com or call +1 203.426.0800 Marine Technology - Archived 7/2005 Outlook
Dynamic Optimization Challenges in Autonomous Vehicle Systems
 Dynamic Optimization Challenges in Autonomous Vehicle Systems Fernando Lobo Pereira, João Borges de Sousa Faculdade de Engenharia da Universidade do Porto (FEUP) Presented by Jorge Estrela da Silva (Phd
Dynamic Optimization Challenges in Autonomous Vehicle Systems Fernando Lobo Pereira, João Borges de Sousa Faculdade de Engenharia da Universidade do Porto (FEUP) Presented by Jorge Estrela da Silva (Phd
Development of a Synchronous High-Speed Acoustic Communication and Navigation System for Unmanned Underwater Vehicles
 Development of a Synchronous High-Speed Acoustic Communication and Navigation System for Unmanned Underwater Vehicles Dr. Pierre-Philippe Beaujean Florida Atlantic University SeaTech 101 N. Beach Road,
Development of a Synchronous High-Speed Acoustic Communication and Navigation System for Unmanned Underwater Vehicles Dr. Pierre-Philippe Beaujean Florida Atlantic University SeaTech 101 N. Beach Road,
A 3D, FORWARD-LOOKING, PHASED ARRAY, OBSTACLE AVOIDANCE SONAR FOR AUTONOMOUS UNDERWATER VEHICLES
 A 3D, FORWARD-LOOKING, PHASED ARRAY, OBSTACLE AVOIDANCE SONAR FOR AUTONOMOUS UNDERWATER VEHICLES Matthew J. Zimmerman Vice President of Engineering FarSounder, Inc. 95 Hathaway Center, Providence, RI 02907
A 3D, FORWARD-LOOKING, PHASED ARRAY, OBSTACLE AVOIDANCE SONAR FOR AUTONOMOUS UNDERWATER VEHICLES Matthew J. Zimmerman Vice President of Engineering FarSounder, Inc. 95 Hathaway Center, Providence, RI 02907
Modeling and Evaluation of Bi-Static Tracking In Very Shallow Water
 Modeling and Evaluation of Bi-Static Tracking In Very Shallow Water Stewart A.L. Glegg Dept. of Ocean Engineering Florida Atlantic University Boca Raton, FL 33431 Tel: (954) 924 7241 Fax: (954) 924-7270
Modeling and Evaluation of Bi-Static Tracking In Very Shallow Water Stewart A.L. Glegg Dept. of Ocean Engineering Florida Atlantic University Boca Raton, FL 33431 Tel: (954) 924 7241 Fax: (954) 924-7270
Underwater Munitions Response Technologies. Herb Nelson
 Underwater Munitions Response Technologies Herb Nelson herbert.h.nelson10.civ@mail.mil 571-372-6400 DoD s Environmental Technology Programs Science and Technology Demonstration/Validation DoD, DOE, EPA
Underwater Munitions Response Technologies Herb Nelson herbert.h.nelson10.civ@mail.mil 571-372-6400 DoD s Environmental Technology Programs Science and Technology Demonstration/Validation DoD, DOE, EPA
Measuring Currents from Aids-to-Navigation Buoys
 Measuring Currents from Aids-to-Navigation Buoys Recent Design Improvements Bob Heitsenrether Kate Bosley, PhD Kasey Hall Overview CO-OPS Background NOAA s Physical Oceanographic Real-time System (PORTS
Measuring Currents from Aids-to-Navigation Buoys Recent Design Improvements Bob Heitsenrether Kate Bosley, PhD Kasey Hall Overview CO-OPS Background NOAA s Physical Oceanographic Real-time System (PORTS
Sonar advancements for coastal and maritime surveys
 ConférenceMéditerranéenneCôtièreetMaritime EDITION1,HAMMAMET,TUNISIE(2009) CoastalandMaritimeMediterraneanConference Disponibleenligne http://www.paralia.fr Availableonline Sonar advancements for coastal
ConférenceMéditerranéenneCôtièreetMaritime EDITION1,HAMMAMET,TUNISIE(2009) CoastalandMaritimeMediterraneanConference Disponibleenligne http://www.paralia.fr Availableonline Sonar advancements for coastal
Autonomous Underwater Vehicles
 Autonomous Underwater Vehicles A View of the Autonomous Underwater Vehicle Market For a number of years now the Autonomous Underwater Vehicle (AUV) has been the undisputed tool of choice for certain niche
Autonomous Underwater Vehicles A View of the Autonomous Underwater Vehicle Market For a number of years now the Autonomous Underwater Vehicle (AUV) has been the undisputed tool of choice for certain niche
Virtual Long Baseline (VLBL) autonomous underwater vehicle navigation using a single transponder
 autonomous underwater vehicle navigation using a single transponder") Calhoun: The NPS Institutional Archive DSpace Repository Theses and Dissertations Thesis and Dissertation Collection 2006-06 Virtual Long Baseline (VLBL) autonomous underwater vehicle navigation using
Calhoun: The NPS Institutional Archive DSpace Repository Theses and Dissertations Thesis and Dissertation Collection 2006-06 Virtual Long Baseline (VLBL) autonomous underwater vehicle navigation using
MOBILE DOCKING OF REMUS-100 EQUIPPED WITH USBL-APS TO AN UNMANNED SURFACE VEHICLE: A PERFORMANCE FEASIBILITY STUDY.
 MOBILE DOCKING OF REMUS-100 EQUIPPED WITH USBL-APS TO AN UNMANNED SURFACE VEHICLE: A PERFORMANCE FEASIBILITY STUDY by Mario Miranda II A Thesis Submitted to the Faculty of The College of Engineering and
MOBILE DOCKING OF REMUS-100 EQUIPPED WITH USBL-APS TO AN UNMANNED SURFACE VEHICLE: A PERFORMANCE FEASIBILITY STUDY by Mario Miranda II A Thesis Submitted to the Faculty of The College of Engineering and
Multistatic, Concurrent Detection, Classification and Localization Concepts for Autonomous, Shallow Water Mine Counter Measures
 Multistatic, Concurrent Detection, Classification and Localization Concepts for Autonomous, Shallow Water Mine Counter Measures PI: Henrik Schmidt Massachusetts Institute of Technology 77 Massachusetts
Multistatic, Concurrent Detection, Classification and Localization Concepts for Autonomous, Shallow Water Mine Counter Measures PI: Henrik Schmidt Massachusetts Institute of Technology 77 Massachusetts
Company Profile. Facilities
 Company Profile R2Sonic was founded in February 2006 by three veteran underwater acoustical engineers; Jens R. Steenstrup, Mark Chun and Kirk Hobart; with the mission to utilize their experience to bring
Company Profile R2Sonic was founded in February 2006 by three veteran underwater acoustical engineers; Jens R. Steenstrup, Mark Chun and Kirk Hobart; with the mission to utilize their experience to bring
Results from a Small Synthetic Aperture Sonar
 Results from a Small Synthetic Aperture Sonar Daniel Brown, Daniel Cook, Jose Fernandez Naval Surface Warfare Center - Panama City Code HS11 11 Vernon Avenue Panama City, FL 3247-71 Abstract A Synthetic
Results from a Small Synthetic Aperture Sonar Daniel Brown, Daniel Cook, Jose Fernandez Naval Surface Warfare Center - Panama City Code HS11 11 Vernon Avenue Panama City, FL 3247-71 Abstract A Synthetic
Acoustic positioning system for compact underwater vehicle
 Acoustic positioning system for compact underwater vehicle Kosei Shimoo and Yutaka Nagashima Department of Electrical and Electronic Engineering Sasebo National College of Technology 1-1 Okishin-machi,
Acoustic positioning system for compact underwater vehicle Kosei Shimoo and Yutaka Nagashima Department of Electrical and Electronic Engineering Sasebo National College of Technology 1-1 Okishin-machi,
WORLD CLASS through people, technology and dedication
 WORLD CLASS through people, technology and dedication WORLD CLASS through people, technology and dedication 1 2 Acoustic Positioning Systems Hydrofest Robert Gordon University Scott Sutherland Building
WORLD CLASS through people, technology and dedication WORLD CLASS through people, technology and dedication 1 2 Acoustic Positioning Systems Hydrofest Robert Gordon University Scott Sutherland Building
NEW ROLES FOR UUVS IN INTELLIGENCE, SURVEILLANCE, AND RECONNAISSANCE
 NEW ROLES FOR UUVS IN INTELLIGENCE, SURVEILLANCE, AND RECONNAISSANCE Barbara Fletcher Space and Naval Warfare Systems Center D744 San Diego, CA USA bfletch@spawar.navy.mil ABSTRACT Intelligence, Surveillance,
NEW ROLES FOR UUVS IN INTELLIGENCE, SURVEILLANCE, AND RECONNAISSANCE Barbara Fletcher Space and Naval Warfare Systems Center D744 San Diego, CA USA bfletch@spawar.navy.mil ABSTRACT Intelligence, Surveillance,
Form Approved OMB No A REPORT DOCUMENTATION PAGE. High Frequency Side Scan Sonar for Target Reacquisition and Identification
 1 Me puom reporting burden 10rlo WlNl COollC1,o0 Of Im REPORT DOCUMENTATION PAGE Form Approved OMB No. 0704-01-018A oonr l I esln to average I rnot-r In i touolne o m Ing Instucto he, "apenc on uth s sou,
1 Me puom reporting burden 10rlo WlNl COollC1,o0 Of Im REPORT DOCUMENTATION PAGE Form Approved OMB No. 0704-01-018A oonr l I esln to average I rnot-r In i touolne o m Ing Instucto he, "apenc on uth s sou,
Office of Naval Research. BAA , Undersea Cooperative Cueing and Intervention (UC2I) Amendment 3
 Amendment 3") Office of Naval Research BAA 07-028, Undersea Cooperative Cueing and Intervention (UC2I) Amendment 3 The following questions and answers are provided for all potential respondents in the interest of procurement
Office of Naval Research BAA 07-028, Undersea Cooperative Cueing and Intervention (UC2I) Amendment 3 The following questions and answers are provided for all potential respondents in the interest of procurement
ACOUSTIC TRACKING OF AN UNMANNED UNDERWATER VEHICLE USING A PASSIVE ULTRASHORT BASELINE ARRAY AND A SINGLE LONG BASELINE BEACON. Kyle L.
 ACOUSTIC TRACKING OF AN UNMANNED UNDERWATER VEHICLE USING A PASSIVE ULTRASHORT BASELINE ARRAY AND A SINGLE LONG BASELINE BEACON by Kyle L. Seaton A Thesis Submitted to the Faculty of The College of Engineering
ACOUSTIC TRACKING OF AN UNMANNED UNDERWATER VEHICLE USING A PASSIVE ULTRASHORT BASELINE ARRAY AND A SINGLE LONG BASELINE BEACON by Kyle L. Seaton A Thesis Submitted to the Faculty of The College of Engineering
Responsive AUV Localization and Mapping Project. Ron Lewis, Project Manager June 14 th, 2012
 Responsive AUV Localization and Mapping Project Ron Lewis, Project Manager June 14 th, 2012 Project Overview Project duration: Approximately 5 Years June 1, 2010 to March 31, 2015 Primary objectives: Develop
Responsive AUV Localization and Mapping Project Ron Lewis, Project Manager June 14 th, 2012 Project Overview Project duration: Approximately 5 Years June 1, 2010 to March 31, 2015 Primary objectives: Develop
Integration of Inertial Measurements with GNSS -NovAtel SPAN Architecture-
 Integration of Inertial Measurements with GNSS -NovAtel SPAN Architecture- Sandy Kennedy, Jason Hamilton NovAtel Inc., Canada Edgar v. Hinueber imar GmbH, Germany ABSTRACT As a GNSS system manufacturer,
Integration of Inertial Measurements with GNSS -NovAtel SPAN Architecture- Sandy Kennedy, Jason Hamilton NovAtel Inc., Canada Edgar v. Hinueber imar GmbH, Germany ABSTRACT As a GNSS system manufacturer,
FLY EYE RADAR MINE DETECTION GROUND PENETRATING RADAR ON TETHERED DRONE PASSIVE RADAR FOR SMALL UAS PASSIVE SMALL PROJECTILE TRACKING RADAR
 PASSIVE RADAR FOR SMALL UAS PLANAR MONOLITHICS INDUSTRIES, INC. East Coast: 7311F GROVE ROAD, FREDERICK, MD 21704 USA PHONE: 301-662-5019 FAX: 301-662-2029 West Coast: 4921 ROBERT J. MATHEWS PARKWAY, SUITE
PASSIVE RADAR FOR SMALL UAS PLANAR MONOLITHICS INDUSTRIES, INC. East Coast: 7311F GROVE ROAD, FREDERICK, MD 21704 USA PHONE: 301-662-5019 FAX: 301-662-2029 West Coast: 4921 ROBERT J. MATHEWS PARKWAY, SUITE
PRINCIPLE OF SEISMIC SURVEY
 PRINCIPLE OF SEISMIC SURVEY MARINE INSTITUTE Galway, Ireland 29th April 2016 Laurent MATTIO Contents 2 Principle of seismic survey Objective of seismic survey Acquisition chain Wave propagation Different
PRINCIPLE OF SEISMIC SURVEY MARINE INSTITUTE Galway, Ireland 29th April 2016 Laurent MATTIO Contents 2 Principle of seismic survey Objective of seismic survey Acquisition chain Wave propagation Different
Acoustic Communications for UUVs
 Acoustic Communications for UUVs Josko Catipovic Lee Freitag Naval Undersea Warfare Center Woods Hole Oceanographic Institution Newport, RI 02841 Woods Hole, MA 02543 (401) 832-3259 (508) 289-3285 catipovicj@npt.nuwc.navy.mil
Acoustic Communications for UUVs Josko Catipovic Lee Freitag Naval Undersea Warfare Center Woods Hole Oceanographic Institution Newport, RI 02841 Woods Hole, MA 02543 (401) 832-3259 (508) 289-3285 catipovicj@npt.nuwc.navy.mil
Outline Use phase/channel tracking, DFE, and interference cancellation techniques in combination with physics-base time reversal for the acoustic MIMO
 High Rate Time Reversal MIMO Communications Aijun Song Mohsen nbdi Badiey University of Delaware Newark, DE 19716 University of Rhode Island, 14-1616 Oct. 2009 Outline Use phase/channel tracking, DFE,
High Rate Time Reversal MIMO Communications Aijun Song Mohsen nbdi Badiey University of Delaware Newark, DE 19716 University of Rhode Island, 14-1616 Oct. 2009 Outline Use phase/channel tracking, DFE,
Real-Time Current Measurements Improve Vessel Safety and Port Efficiency
 REPRINT Real-Time Current Measurements Improve Vessel Safety and Port Efficiency The ATON System Provides Port Decision Makers With a Reliable and Cost-Effective Alternative in Real-Time Current Monitoring
REPRINT Real-Time Current Measurements Improve Vessel Safety and Port Efficiency The ATON System Provides Port Decision Makers With a Reliable and Cost-Effective Alternative in Real-Time Current Monitoring
Now add true dual channel side scan and Sub Bottom profile to your hydrographic surveys.
 New ROSS 4900 Series Side Scan Sonar and Sub Bottom profiler. Now add true dual channel side scan and Sub Bottom profile to your hydrographic surveys. Laboratories, well known for its line of multi channel
New ROSS 4900 Series Side Scan Sonar and Sub Bottom profiler. Now add true dual channel side scan and Sub Bottom profile to your hydrographic surveys. Laboratories, well known for its line of multi channel
Shallow Water Array Performance (SWAP): Array Element Localization and Performance Characterization
: Array Element Localization and Performance Characterization") Shallow Water Array Performance (SWAP): Array Element Localization and Performance Characterization Kent Scarbrough Advanced Technology Laboratory Applied Research Laboratories The University of Texas
Shallow Water Array Performance (SWAP): Array Element Localization and Performance Characterization Kent Scarbrough Advanced Technology Laboratory Applied Research Laboratories The University of Texas
Undersea Communications
 Smart Super Vehicles Undersea Communications This material is based upon work supported by the Assistant Secretary of Defense for Research and Engineering under Air Force Contract No. FA8721-05-C-0002
Smart Super Vehicles Undersea Communications This material is based upon work supported by the Assistant Secretary of Defense for Research and Engineering under Air Force Contract No. FA8721-05-C-0002
The Application of Autonomous Underwater Vehicle (AUV) Technology in the Oil Industry Vision and Experiences
 Technology in the Oil Industry Vision and Experiences") The Application of Autonomous Underwater Vehicle (AUV) Technology in the Oil Industry Vision and David BINGHAM and Tony DRAKE, United Kingdom, Andrew HILL, USA and Roger LOTT, United Kingdom Key words:
The Application of Autonomous Underwater Vehicle (AUV) Technology in the Oil Industry Vision and David BINGHAM and Tony DRAKE, United Kingdom, Andrew HILL, USA and Roger LOTT, United Kingdom Key words:
NASNet DPR: NASNet as a Deepwater Acoustic DP Position Reference
 NAUTRONIX MARINE TECHNOLOGY SOLUTIONS NASNet DPR: NASNet as a Deepwater Acoustic DP Position Reference Aberdeen Houston Rio Overview Offshore positioning introduction Considerations of acoustic positioning
NAUTRONIX MARINE TECHNOLOGY SOLUTIONS NASNet DPR: NASNet as a Deepwater Acoustic DP Position Reference Aberdeen Houston Rio Overview Offshore positioning introduction Considerations of acoustic positioning
NEMO - NIXIE Enhanced Modular Option Surface Ship Torpedo Defense (SSTD) Program Update Test Results
 Program Update Test Results") NEMO - NIXIE Enhanced Modular Option Surface Ship Torpedo Defense (SSTD) Program Update Test Results John P. Fumo, CTO ArgonST, Inc 12701 Fair Lakes Circle, Fairfax, VA 22033 Abstract NIXIE Enhanced Modular
NEMO - NIXIE Enhanced Modular Option Surface Ship Torpedo Defense (SSTD) Program Update Test Results John P. Fumo, CTO ArgonST, Inc 12701 Fair Lakes Circle, Fairfax, VA 22033 Abstract NIXIE Enhanced Modular
Autonomous Inspection of Subsea Facilities
 Autonomous Inspection of Subsea Facilities RPSEA 09121 3300 05 Final Presentation RPSEA Ultra Deepwater Subsea Systems TAC Meeting January 24, 2012 GFBEDC Boardroom Sugar Land, TX John Jacobson, Lockheed
Autonomous Inspection of Subsea Facilities RPSEA 09121 3300 05 Final Presentation RPSEA Ultra Deepwater Subsea Systems TAC Meeting January 24, 2012 GFBEDC Boardroom Sugar Land, TX John Jacobson, Lockheed
SAAB SEA POWER CAPABILITIES FOR MALAYSIA AND APAC LIMA Robert Hewson Vice President Head of Communications, Saab Asia Pacific
 1 SAAB SEA POWER CAPABILITIES FOR MALAYSIA AND APAC LIMA 2017 Robert Hewson Vice President Head of Communications, Saab Asia Pacific This document and the information contained herein is the property of
1 SAAB SEA POWER CAPABILITIES FOR MALAYSIA AND APAC LIMA 2017 Robert Hewson Vice President Head of Communications, Saab Asia Pacific This document and the information contained herein is the property of
MFAM: Miniature Fabricated Atomic Magnetometer for Autonomous Magnetic Surveys
 MFAM: Miniature Fabricated Atomic Magnetometer for Autonomous Magnetic Surveys Bart Hoekstra Rahul Mhaskar Drones Applied to Geophysical Mapping Workshop Unmanned Vehicles The Future of Geophysics REMUS
MFAM: Miniature Fabricated Atomic Magnetometer for Autonomous Magnetic Surveys Bart Hoekstra Rahul Mhaskar Drones Applied to Geophysical Mapping Workshop Unmanned Vehicles The Future of Geophysics REMUS