NOAA Newport 2012 ADCP
|
|
|
- Letitia Hubbard
- 5 years ago
- Views:
Transcription
1 NOAA Newport 2012 ADCP Part I: ADCP Getting Ocean Velocity ADCP Acquisition Systems: UHDAS, VmDAS What can go wrong Part II: UHDAS 1: Outline
2 NOAA Newport 2012 ADCP Part II: UHDAS 2: Outline ADCP Processing with CODAS UHDAS: What it does Monitoring At sea On Land What can be changed, tested
3 NOAA Newport 2012 ADCP Part I: ADCP 3: Outline Getting Ocean Velocity ADCP Acquisition Systems: UHDAS, VmDAS What can go wrong
4 (I) ADCP: Getting Ocean Velocity ADCP : Acoustic (it pings along beams at a frequency) Doppler (uses frequency shift to get velocity along the beam) Current (include many more steps to get ocean velocity) Profiler (listen for the return in small chunks of time to create a vertical profile) 4: ADCP
5 (I) ADCP: Getting Ocean Velocity ADCP : Acoustic 5: ADCP-- Acoustic
6 ADCP : Acoustic Doppler 6: ADCP-- Doppler
7 ADCP: Acoustic Doppler Current Profiler 7: ADCP-- Profiler
8 ADCP : Getting Ocean Currents 8: ADCP-- Current (1)
9 ADCP : Getting Ocean Currents 9: ADCP-- Current (2)
10 ADCP Getting Ocean Currents Four beams 90deg apart 30 (or 20)deg up from vertical forward beam is #3 usually 45deg starboard of forward 10: ADCP-- Current (3)
11 ADCP Getting Ocean Currents Four beams 90deg apart 30 (or 20)deg up from vertical forward beam is #3 usually 45deg starboard of forward 11: ADCP-- Current (4)

12 ADCP Getting Ocean Currents Two opposite beams make a vertical plane 12: ADCP-- Current (5)

13 ADCP Getting Ocean Currents Now we have two vertical planes at 90deg to each other These are the basis of the horizontal and vertical velocities Horizontal velocities will be used To get ocean velocities Vertical velocities will be used for error-checking 13: ADCP-- Current (6)

14 ADCP Getting Ocean Currents Two beams make one vertical plan This shows the velocities determined by the Doppler shift; beam velocities 14: ADCP-- Current (7)
15 ADCP: Getting Ocean Currents Interpret the two beam velocities one horizontal and one vertical velocity 15: ADCP-- Current (8)
16 ADCP: Getting Ocean Currents Now we see the horizontal and vertical velocities on the two planes Use the horizontal velocities for determining ocean velocities requires more steps. 16: ADCP-- Current (9)
17 ADCP: Getting Ocean Currents This is a top-down view of the measured horizontal velocity in instrument coordinates (from the two planes made by the beams) (determining ocean velocities requires more steps) 17: ADCP-- Current (10)
18 ADCP: Getting Ocean Currents This is a top-down view of the measured horizontal velocity in ship coordinates. The instrument coordinates values are rotated by the transducer angle. (determining ocean velocities requires more steps) 18: ADCP-- Current (11)
19 ADCP: Getting Ocean Currents This is a top-down view of the measured horizontal velocity in earth coordinates. The instrument coordinates values are rotated by the ship's heading. (determining ocean velocities requires more steps) 19: ADCP-- Current (12)
20 ADCP: Getting Ocean Currents Summary of steps: Doppler to beam (not shown) below here: horizontal+vertical beam to instrument instrument to ship ship to earth 20: ADCP-- Current (13)
21 ADCP: Getting Ocean Currents Earth coordinates + GPS gives ship speed add ship speed to measured velocity to get ocean velocity 21: ADCP-- Current (14)
22 ADCP: Getting Ocean Currents Complete summary: beam velocities + transducer orientation + + heading + gps ocean velocities 22: ADCP-- Current (15)
23 NOAA Newport 2012 ADCP Part I: ADCP 23: Outline Getting Ocean Velocity ADCP Acquisition Systems: UHDAS, VmDAS What can go wrong
24 ADCP Acquisition systems Basic requirements: Control ADCP settings Acquire ADCP data Acquire ancillary data Core Position Attitude (heading) Timestamp all Processing Monitoring 24: Acquisition Systems (1) Extra
25 ADCP Acquisition systems Basic requirements Processing Coordinate transformation Editing Averaging Graphical Displays Monitoring 5: Acquisition Systems (2)
26 ADCP Acquisition systems Basic requirements Processing Monitoring Computer system Data acquisition Processing Access to data 26: Acquisition Systems (3)
27 ADCP Acquisition systems Basic requirements Overview Serial setup Data logging Processing Monitoring 27: Acquisition Systems Basic Requirements (1)
28 ADCP Acquisition Systems- Overview UHDAS developer Univ Hawaii style linux system source open source purpose seagoing oceanographers goals maximize usefulness at sea long-term value for research evolution continuous setup complex 28: Acquisition Systems Basic requirements (2) VmDAS TRDI windows application executable all-purpose off-the-shelf incremental confusing
29 Acquisition: Serial Setup UHDAS ADCPs multiple feeds any number messages many types can add more subsample feed choose messages VmDAS one (per instance) 3 (older version=2) fewer types record all record all gui controls instrument settings everything operation simple simple/confusing protected serial nothing protected Processing 29: Acquisition Systems Basic requirements (3)
30 Acquisition: Data Logging UHDAS data logging separate processes time tagging buffered tag every line data formats multiple data directory heirarchical time range match per file filenames sort always ( time=ascii) metadata stored with data 30: Acquisition Systems Basic requirements (4) VmDAS one big program unbuffered tag ensemble TRDI ADCP flat match for one logging period one logging period ascii files elsewhere
31 ADCP Acquisition systems Basic requirements Overview Serial setup Data logging Processing Processing components Accessing data products Monitoring 31: Acquisition Systems Processing (1)
32 Processing editing heading secondary heading pings configure plots?? plots UHDAS CODAS reliable corrected to accurate interleaved no VmDAS minimal primary replaced by fallback first yes oceanographic: - profiles (E,N) profile (speed, dir) - vector (+topo) vector - contour WinADCP? - bridge (mariner) 32: Acquisition Systems Processing (2)
33 Accessing Data Products UHDAS access plots ship's web console data formats TRDI Matlab netcdf access data ship's web windows share NFS documentation ship's web www speedlog out NB150 only 33: Acquisition Systems Accessing Data VmDAS console only TRDI acquisition PC windows share acquisition PC www yes
34 ADCP Acquisition systems Basic requirements Overview Serial setup Data logging Processing Processing components Accessing data products Monitoring 34: Acquisition Systems Monitoring (1)
35 Monitoring monitor UHDAS computer serial daily report daily_report ADCP Processing beam plots daily_report plots calibration ping rate bottom track to anyone remotely 35: Acquisition Systems Monitoring (2) VmDAS? LOG and console messages configure tables configure plots configure plots no? no no
36 NOAA Newport 2012 ADCP Part I: ADCP 36: Outline Getting Ocean Velocity ADCP Acquisition Systems: UHDAS, VmDAS What can go wrong Perspective: systems Perspective: data flow Perspective: symptoms in ocean current Perspective: VmDAS
37 ADCP: what can go wrong Viewed from the perspective of: ADCP systems (components) Computer ADCP Ancillary: GPS, Heading Data flow (where does the problem occur) Manifestation in ocean velocities examples Cross-track error (transducer angle) Along-track error (scale factor) Data loss (4 recent examples) 37: Things go wrong
38 ADCP: what can go wrong Viewed from the perspective of: ADCP systems (components) Computer ADCP Ancillary: GPS, Heading Data flow (where does the problem occur) Manifestation in data product examples Cross-track error (transducer angle) Along-track error (scale factor) Data loss (4 recent examples) 38: Things go wrong
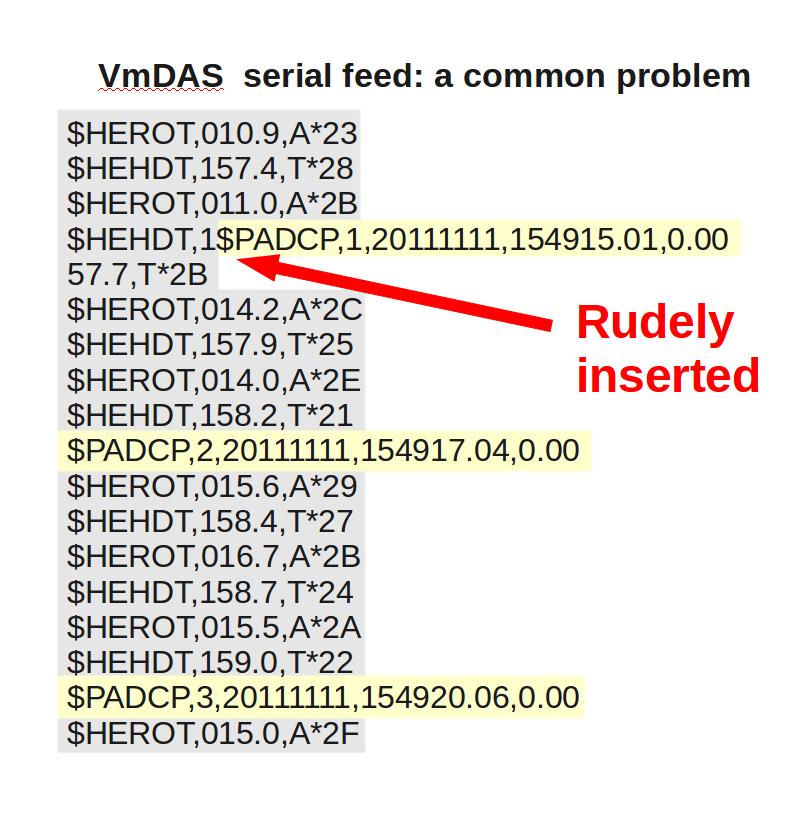
39 What can go wrong: ADCP System (Computer) PC clock is erratic PC clock is set to local time Poor quality serial feed Too many messages Low baud rate Multiple unbuffered devices 39: Things go wrong: computer Partial loss, Garbled messages
40 Bad Serial Feeds VmDAS is vulnerable to bad serial feeds Demonstration follows...

41

42

43
44
45

46
47 SUMMARY:
48 What can go wrong ADCP ADCP loss or degradation Loss of range (loud while underway, weak beam) Loss of one beam (not good) Loss of multiple beams (repair/replace) Acoustic interference (another pinger) Ice Bubbles Acoustic noise (results in loss of range) Electrical noise 48: Things go wrong - ADCP
49 What can go wrong ancillary Heading Heading device fails Inaccurate heading device (old mechanical gyro) Position Position device fails; gappy Any: serial feed problems Cable falls out Instrument fails 49: Things go wrong - ancillary
50 ADCP: what can go wrong Viewed from the perspective of: ADCP systems (components) Computer ADCP Ancillary: GPS, Heading Data flow (where does the problem occur) Manifestation in ocean velocities examples Cross-track error (transducer angle) Along-track error (scale factor) Data loss (4 recent examples) 50: Things go wrong
51 ADCP: data loss, degradation (1) degraded range and coverage Bubbles Electric Noise Acoustic noise Lost or weak beam Thick window Ringing Ice Solution: Improve the installation beam velocities + transducer orientation + heading + GPS ocean velocities 51: Things go wrong (system)
52 ADCP: data loss, degradation (2) remaining data compromised Bubbles Electronic noise Acoustic noise Lost or weak beam Thick window Ringing Ice Solution: Edit out bad data Review what remains 52: Things go wrong (system) beam velocities + transducer orientation + heading + GPS ocean velocities
53 Transducer misalignment (1) angle off by <10deg 1deg error in heading 10cm/s error in ocean velocity Diagnostic: Cross-track error beam velocities + transducer orientation + heading + GPS ocean velocities 53: Things go wrong (system)
54 Transducer misalignment (2) angle off by >90deg (*) Ocean Surveyor acquires data using EA in the calculation of BEAM VELOCITIES. Gross error could irrevocably ruin the data Diagnostic: beam velocities corrupted (wrap) 54: Things go wrong (system) beam velocities + transducer orientation + heading + GPS ocean velocities (*) actual value varies with ship
55 Headings are inaccurate 1deg error in heading 10cm/s error in ocean velocity Diagnostic: Cross-track error beam velocities + transducer orientation + heading + GPS ocean velocities 55: Things go wrong (system)
56 Failure of ancillary (heading, gps) Instrument failure Communications failure Solution: Record multiple sources Switch to 2nd source Reprocess with 1st 56: Things go wrong (system) beam velocities + transducer orientation + heading + GPS ocean velocities
57 Intermittent loss or corruption of ancillary data poor serial feeds Solution: Record multiple sources Switch to 2nd source Reprocess with 1st 57: Things go wrong (system) beam velocities + transducer orientation + heading + GPS ocean velocities
58 ADCP: what can go wrong Viewed from the perspective of: ADCP systems (components) Computer ADCP Ancillary: GPS, Heading Data flow (where does the problem occur) Manifestation in ocean velocities examples Cross-track error (transducer angle) Along-track error (scale factor) Data loss (4 recent examples) 58: Things go wrong
59 What can go wrong: manifestation in ocean velocities (1) Cross-track error: recovery requires accurate heading (2) Along-track error: may indicate a serious problem recovery may be possible, incomplete, ambiguous (3) Other: Acoustic interference Underway bias (bad weather) Bad Setup (4 examples) 59: Things go wrong (symptom)
60 What can go wrong: manifestation in ocean velocities (1) Cross-track error: recovery requires accurate heading (2) Along-track error: may indicate a serious problem recovery may be possible, incomplete, ambiguous (3) Other: Acoustic interference Underway bias (bad weather) Bad Settings (3 examples) 60: Things go wrong (symptom)

61 Symptom = Cross-Track Error Cause = incorrect angle applied 61: Things go wrong (angle, cartoon)
62 Symptom = Cross-Track Error Cause = incorrect angle applied Angle applied comes from Transducer angle (beam 3 clockwise from bow) Heading of ship If UHDAS, Reliable heading for each ping (eg gyro) Heading correction for each averaging period Calculated relative to devices such as Ashtech, POSMV, Seapath, Mahrs, Phins 62: Things go wrong (angle, source)
63 Symptom = Cross-Track Error Cause = incorrect angle applied Angle applied comes from Transducer angle (beam 3 clockwise from bow) This is a constant value for the whole cruise Examples of error in transducer angle follow... 63: Things go wrong (angle, constant)

64 Calibration: angle error -3.6deg 64: Things go wrong (angle, constant error)

65 Calibration: angle error : Things go wrong (angle, constant error)

66 Calibration: angle error : Things go wrong (angle, constant error)
67 Symptom = Cross-Track Error Cause = incorrect angle applied Angle applied comes from Heading, which may be in error by A constant offset A time-dependent offset Example follows... 67: Things go wrong (angle, variable)
68 Phins-Gyro difference varies with time 360 deg 180 deg Heading Heading error Changes in ship's heading affect heading error 68: Things go wrong (angle, variable) 0 deg 0.5 deg 0.0 deg -0.5 deg
69 Effect of Time-Dependent Heading Error on Ocean Velocties 1 degree error in heading means: 0.1m/s error in ocean velocity in the cross-track direction Heading Heading error Changes in ship's heading affect heading error 69: Things go wrong (angle, variable) 0.5 deg 0.0 deg -0.5 deg

70 Is this a heading error? 70: Things go wrong (angle, variable, trick question)

71 Contour plot: Is this cross-track signal (stripes in N/S ocean velocity) due to a heading error? 71: Things go wrong (angle, variable, trick question)
72 Answer Actually, it's really the ocean, but we can't tell without knowing the quality of the accurate heading device. 72: Things go wrong (angle, variable, trick answer)
73 What can go wrong: manifestation in ocean velocities (1) Cross-track error: recovery requires accurate heading (2) Along-track error: may indicate a serious problem recovery may be possible, incomplete, ambiguous (3) Other: Acoustic interference Underway bias (bad weather) Bad Settings (3 examples) 73: Things go wrong (along-track)
74 Examples of along-track error Acoustic interference Underway bias (bad weather) Scale factor (NB150 soundspeed correction) (things that look like scale factor) 74: Things go wrong (along-track error)
75 Along-track Error 75: Things go wrong (scale factor, cartoon)
76 Examples of along-track error Acoustic interference Underway bias (bad weather) Scale factor (NB150 soundspeed correction) (things that look like scale factor) 76: Things go wrong (along-track error)

77 Acoustic Interference: single ping 77: Errors

78 Acoustic Inference: averaged 78: Errors

79 79: Errors
80 Examples of along-track error Acoustic interference Underway bias (bad weather) Scale factor (NB150 soundspeed correction) (things that look like scale factor) 80: Things go wrong (along-track error)

81 single-ping editing:underway bias 81: Errors
")
82 Averaged (unedited) data: Acoustic interference and underway bias (bubbles) 82: Errors

83 83: Errors
84 Examples of along-track error Acoustic interference Underway bias (bad weather) Scale factor (NB150 soundspeed correction) (things that look like scale factor) 84: Things go wrong (along-track error)
85 scale factor: alongtrack bias 85: Things go wrong (scale factor, before)

86 After scale factor applied 86: Things go wrong (scale factor, after)
87 Problems that look like alongtrack bias Time lag between ADCP and heading Time lag between ADCP and GPS Transducer very different fore/aft from GPS (example) 87: alongtrack bias
")
88 Transducer not aligned with GPS heading...using actual location...using shifted GPS location difference 8: alongtrack bias speed Ocean V (north) m/s Ocean V (north) m/s
89 Things go wrong: VmDAS examples Problem Exists Solution, for previous data Rely on reprocessing Might require new software Might be able to fix... Might NOT be able to fix Solution, for future cruises (fix it) 89: Vmdas examples
90 Things go wrong: VmDAS examples (1) Bad Processing settings: (2) Serial Snafu Sette: acquiring heading, not using it Gordon Gunter: intermittently awful serial data (3) Bad setup (a) Walton Smith: POSMV (b) MacArthur2: not acquiring heading at all (4) Bad luck 90: Vmdas examples the ONLY heading source Poor quality several: 3 beams
91 Things go wrong: VmDAS example (1) Problem: Bad Processing settings: Sette: acquiring heading, but not using it 91: Vmdas examples


92 Acquiring headings, but not using... N2R file CFG Internal sensor only LDR NAV 92: Vmdas examples
93 Things go wrong: VmDAS example (1) Problem: Bad Processing Settings: Sette: acquiring heading, but not using it Solution (1): Reprocess with VmDAS; use heading (10 hours) Run through CODAS matlab processing (2 hours) Solution (2): Write additional CODAS software (many hours) Stage VmDAS in UHDAS format (5 min) Process as UHDAS data; use heading (15 min) 93: Vmdas examples
94 Things go wrong: VmDAS example (2) Problem: Serial Snafu Gordon Gunter: intermittantly awful serial data 94: Vmdas examples
 Number of")

95 Things go wrong: VmDAS example (2) Number of characters per line bad good 95: Vmdas examples
96 Things go wrong: VmDAS example (2) Gordon Gunter: intermittantly awful serial data Solution for future cruises: Fix it: direct serial feeds from GPS and gyro Solution: past cruises Expert: use other data to patch in position, heading MIGHT NOT WORK Resulting Data quality: unknown NOT TESTED; expert level processing; timeconsuming 96: Vmdas examples
97 Things go wrong: VmDAS example (3a) Problem: Bad setup Walton Smith: POSMV = the ONLY heading source and not rock solid (heading errors) 97: Vmdas examples
98 Things go wrong: VmDAS example (3a) 98: Vmdas examples
99 Things go wrong: VmDAS example (3a) POSMV is unhealthy and is the only heading source Solution for future cruises: Log gyro as well Solution for past cruises: Expert: use other data to patch in position, heading MIGHT NOT WORK Resulting Data quality: unknown NOT TESTED; expert level processing; timeconsuming 99: Vmdas examples
100 Things go wrong: VmDAS example (3b) Problem: Bad Acquisition Setup MacArthur2: not acquiring heading at all 100: Vmdas examples
 VmDAS Transform Tab nothing selected!")
101 Heading is not being logged at all (1) Only N1R files (2) No heading field here: (3) VmDAS Transform Tab nothing selected! 101: Vmdas examples



102 Heading not used NAV: From serial logging LDR: internal sensor only 102: Vmdas examples
103 Things go wrong: VmDAS example (3b) MacArthur 2 not logging heading at all Solution for future cruises: Fix it: Acquire Heading Solution for past cruises: Expert: use other data to patch in position, heading MIGHT NOT WORK Resulting Data quality: unknown NOT TESTED; expert level processing; timeconsuming 103: Vmdas examples
104 Things go wrong: VmDAS examples Problem: Bad luck Various ships: 3 beams (for many months) Solution for past cruises: Process data using 3-beam solutions Data quality reduced Solution for future cruises: Replace/repair instrument 104: Vmdas examples
105 NOAA Newport 2012 ADCP Part II: UHDAS ADCP Processing with CODAS UHDAS: What it does Monitoring At sea On Land What can be changed, tested 105: Outline
106 NOAA Newport 2012 ADCP Part II: UHDAS ADCP Processing with CODAS UHDAS: What it does Monitoring At sea On Land What can be changed, tested 106: Outline
107 CODAS Processing Overview CODAS: Common Ocean Data Access System Portable Self-descriptive aggregated files (vs/ netcdf which is one file) designed for ADCP data CODAS Processing produce ocean velocities tools to access and modify CODAS files 107: CODAS
108 CODAS Processing Steps read ADCP + ancillary data [transform, edit single-pings, average] load into CODAS database nudge positions to get smooth reference layer apply heading corrections (calculated from difference between gyro and accurate heading) determine calibration values (angle, scale factor), - apply angle and scale factor edit out bad profiles of averaged data 108: CODAS
109 109: CODAS

110 110: CODAS
111 CODAS Processing Supports : CODAS

112 At Sea At Home 112: CODAS
113 NOAA Newport 2012 ADCP Part II: UHDAS ADCP Processing with CODAS UHDAS: What it does Monitoring At sea On Land What can be changed, tested 113: Outline
114 UHDAS: what it does Data acquisition and processing Data access (for scientist at sea) Monitoring tools at sea from shore 114: UHDAS: what it does
115 UHDAS: what it does: Data acquisition logs and timestamps data parses NMEA data (Matlab, Python)... and processing transforms (ADCP), grids (ancillary), edits (pings) averages, loads (into CODAS database) all CODAS processing 115: UHDAS: what it does
116 UHDAS: What it does: Data Access... web site on ship with 5-minute profile (updated 5min) 3-day vector and contour plot (updated 30min) matlab files via web (used in 3-day plots) full-resolution processed (5min averages) via samba (windows share), NFS Files in Matlab, NetCDF, or CODAS (+access tools ) 116: UHDAS: what it does
117 UHDAS: What it does Monitoring... at sea: processing (web plots) health of accurate heading device (web plots) data acquisition (UHDAS tool) from shore: sends daily with attachment diagnostic files data snippet shore-based figures generated from snippet 117: UHDAS: what it does
118 UHDAS cruise directory structure 118: Where things are written
119 Cruise Sequence (for operator) Start UHDAS gui Start cruise Start logging; directory contents of.. raw rbin gbin proc

120 UHDAS gui tool
121 NOAA Newport 2012 ADCP Part II: UHDAS ADCP Processing with CODAS UHDAS: What it does Monitoring At sea On Land What can be changed, tested 121: Outline
122 Monitoring: At Sea There are three categories of monitoring: (1) CODAS Processing Most refined (2) health of components (Ashtech) (3) data acquisition Example at-sea web site 122: Monitoring (at sea) Least refined
123 Monitoring: At Sea There are three categories of monitoring: (1) CODAS Processing (2) health of components (Ashtech) (3) data acquisition 123: Monitoring (at sea)

124 Monitoring At Sea: UHDAS web site 124: Monitoring (at sea)

125 125: Monitoring (at sea)

126 126: Monitoring (at sea)

127 127: Monitoring (at sea)
128 128: Monitoring (at sea)

129 129: Monitoring (at sea)
130 Monitoring: At Sea There are three categories of monitoring: (1) CODAS Processing (2) health of components (Ashtech) (3) data acquisition 130: Monitoring (at sea)
131 Attitude Health Examples of Ashtech POSMV Phins Statistics generated for all 3 Example of POSMV in trouble 131: Monitoring (at sea)

132 Ashtech 132: Monitoring (at sea)
133 POSMV 133: Monitoring (at sea)

134 Phins 134: Monitoring (at sea)

135 Statistics generated in daily for three cases 135: Monitoring (at sea)

136 POSMV in trouble 136: Monitoring (at sea)
137 Monitoring: At Sea There are three categories of monitoring: (1) CODAS Processing (2) health of components (Ashtech) (3) data acquisition 137: Monitoring (at sea)

138 Monitoring At Sea: data Acquisition 138: Monitoring (at sea)
139 UHDAS: Monitoring from shore Link to on-shore monitoring: UHDAS ships text figures diagnostic files 139: Monitoring (from shore)

140 UHDAS: Actual link screenshot 140: Monitoring (from shore)
141 Monitoring: From Shore from the text CODAS Processing health of heading device (eg. Ashtech) PC clock Bottom track (on/off), ping rate (triggered) from the diagnostic files: data acquisition processing troubleshooting 141: Monitoring (from shore)
142 Monitoring: From Shore from the text CODAS Processing health of heading device (eg. Ashtech) PC clock Bottom track (on/off), ping rate (triggered) Description follows : Monitoring (from shore)
143 143: Monitoring (from shore)

144 144: Monitoring (from shore)

145 145: Monitoring (from shore)

146 146: Monitoring (from shore)

147 147: Monitoring (from shore)

148 148: Monitoring (from shore)

149 149: Monitoring (from shore)

150 50: Monitoring (from shore)
151 Monitoring: From Shore from the diagnostic files: tails.txt data acquisition processing troubleshooting cals.txt calibration 151: Monitoring (from shore)
152 Diagnostics reminder: UHDAS cruise directory structure File tails.txt shows recent contents of raw, rbin, gbin 152: Monitoring (from shore)
153 UHDAS diagnostic file: tails.txt last 12 lines of each NMEA (or log) file last 12 raw files (each kind) last 12 rbin files (each kind) last 12 gbin files (each kind) 153: Monitoring (from shore)
154 UHDAS diagnostic file: cals.txt keep an eye on calibration 154: Monitoring (from shore)
155 NOAA Newport 2012 ADCP Part II: UHDAS ADCP Processing with CODAS UHDAS: What it does Monitoring At sea On Land What can be changed, tested 155: Outline
156 UHDAS: what can be changed (not much) with the UHDAS tool: bb, nb mode (OS75, OS150) bottom tracking on/off bin size (and blank) if required (carefully edit sensor_cfg.py) serial port, baud rate 156: Configuration
157 UHDAS: what they'll ask for It's up to you but I don't recommend it smaller bins than the default bottom tracking on Does not solve anything Most useful for troubleshooting 157: Configuration
158 UHDAS: what they'll ask for I think the answer is 'no' but ask Jules more rapid updating of the database finer grain than 5min averages The answer is 'no', in order to preserve the reliability of the UHDAS installation 158: Configuration
159 Configuration Files (expert) proc_cfg.py uhdas_cfg.py transducer angle serial inputs used for transformations averaging interval timers (5min, 30min) bin range for bridge plots and vector plot sensor_cfg.py ports baud rates messages 159: Configuration
160 Block diagram of sensor_cfg.py This is a python program. Python is sensitive to Case Indentation Punctuation 160: Configuration

161 161: Configuration
162 162: Configuration
163 UHDAS/CODAS NOAA Presentation: Links to the documentation Part I: ADCP Getting Ocean Velocity ADCP Acquisition Systems: VmDAS (TRDI),UHDAS What can go wrong Part II: UHDAS ADCP Processing with CODAS What it does Monitoring (at sea, from shore) What can be changed, tested 163: Outline
Falkor 2017 UHDAS installation and ADCP evaluation
 Falkor 2017 UHDAS installation and ADCP evaluation Dr. Julia M Hummon University of Hawaii hummon@hawaii.edu Revision History 06/06/17 draft 07/03/17 final Table of Contents 1 Introduction...1 1.1 ADCPs...1
Falkor 2017 UHDAS installation and ADCP evaluation Dr. Julia M Hummon University of Hawaii hummon@hawaii.edu Revision History 06/06/17 draft 07/03/17 final Table of Contents 1 Introduction...1 1.1 ADCPs...1
A shipboard ADCP system requires the Doppler sonar itself, plus at least two ancillary data streams: position and heading.
 SHIPBOARD ADCP MEASUREMENTS E. Firing and J.M. Hummon University of Hawai i at Manoa School of Ocean and Earth Science Technology, 1000 Pope Road, Honolulu, Hawai i 96822 U.S.A. e-mail: efiring@hawaii.edu,
SHIPBOARD ADCP MEASUREMENTS E. Firing and J.M. Hummon University of Hawai i at Manoa School of Ocean and Earth Science Technology, 1000 Pope Road, Honolulu, Hawai i 96822 U.S.A. e-mail: efiring@hawaii.edu,
11. Lowered Acoustic Doppler Current Profiler (LADCP)
") 11. Lowered Acoustic Doppler Current Profiler (LADCP) 11.1 Instrument Setup The JC031 Drake Passage cruise began in Punta Arenas equipped with a compliment of 3 fully functioning LADCP s, all the same
11. Lowered Acoustic Doppler Current Profiler (LADCP) 11.1 Instrument Setup The JC031 Drake Passage cruise began in Punta Arenas equipped with a compliment of 3 fully functioning LADCP s, all the same
User Configurable POSITION 303 DATA OUTPUT 450 HEADING 910
 WinFrog Device Group: Device Name/Model: Device Manufacturer: Device Data String(s) Output to WinFrog: WinFrog Data String(s) Output to Device: WinFrog Data Item(s) and their RAW record: GPS TRACS TDMA
WinFrog Device Group: Device Name/Model: Device Manufacturer: Device Data String(s) Output to WinFrog: WinFrog Data String(s) Output to Device: WinFrog Data Item(s) and their RAW record: GPS TRACS TDMA
Multibeam Echosounder Metadata and Quality Statistics
 Multibeam Echosounder Metadata and Quality Statistics Dave Mann, Survey Support Manager, Gardline Geosurvey Gardline MBES Systems Sea Explorer EM1002 RV Triton EM1002(S) Ocean Seeker EM1002(S) Ocean Endeavour
Multibeam Echosounder Metadata and Quality Statistics Dave Mann, Survey Support Manager, Gardline Geosurvey Gardline MBES Systems Sea Explorer EM1002 RV Triton EM1002(S) Ocean Seeker EM1002(S) Ocean Endeavour
Kongsberg Seatex AS Pirsenteret N-7462 Trondheim Norway POSITION 303 VELOCITY 900 HEADING 910 ATTITUDE 413 HEAVE 888
 WinFrog Device Group: Device Name/Model: Device Manufacturer: Device Data String(s) Output to WinFrog: WinFrog Data String(s) Output to Device: WinFrog Data Item(s) and their RAW record: GPS SEAPATH Kongsberg
WinFrog Device Group: Device Name/Model: Device Manufacturer: Device Data String(s) Output to WinFrog: WinFrog Data String(s) Output to Device: WinFrog Data Item(s) and their RAW record: GPS SEAPATH Kongsberg
CAST Application User Guide
 CAST Application User Guide for DX900+ Electromagnetic Multilog Sensor U.S. Patent No. 7,369,458. UK 2 414 077. Patents Pending 17-630-01-rev.b 05/24/17 1 Copyright 2017 Airmar Technology Corp. All rights
CAST Application User Guide for DX900+ Electromagnetic Multilog Sensor U.S. Patent No. 7,369,458. UK 2 414 077. Patents Pending 17-630-01-rev.b 05/24/17 1 Copyright 2017 Airmar Technology Corp. All rights
Stitching MetroPro Application
 OMP-0375F Stitching MetroPro Application Stitch.app This booklet is a quick reference; it assumes that you are familiar with MetroPro and the instrument. Information on MetroPro is provided in Getting
OMP-0375F Stitching MetroPro Application Stitch.app This booklet is a quick reference; it assumes that you are familiar with MetroPro and the instrument. Information on MetroPro is provided in Getting
Acoustic ranging. Greg Hassell. Technical Manager, Acoustics TECS. A presentation to the NPL Conference. 23 May
 Acoustic ranging Greg Hassell Technical Manager, Acoustics TECS A presentation to the NPL Conference 23 May 2007 Acoustic ranging 01 The reasons / requirements for ranging 02 The UK acoustic ranging capability
Acoustic ranging Greg Hassell Technical Manager, Acoustics TECS A presentation to the NPL Conference 23 May 2007 Acoustic ranging 01 The reasons / requirements for ranging 02 The UK acoustic ranging capability
SeaSonde Radial Site Release 6 CrossLoopPatterner Application Guide Apr 21, 2009 Copyright CODAR Ocean Sensors, Ltd
 CODAR O C E A N S E N S O R S SeaSonde Radial Site Release 6 CrossLoopPatterner Application Guide Apr 21, 2009 Copyright CODAR Ocean Sensors, Ltd CrossLoopPatterner is an utility for converting LOOP files
CODAR O C E A N S E N S O R S SeaSonde Radial Site Release 6 CrossLoopPatterner Application Guide Apr 21, 2009 Copyright CODAR Ocean Sensors, Ltd CrossLoopPatterner is an utility for converting LOOP files
How to use the VEMCO Range Test Software. 14 Jan 2015 DOC
 How to use the VEMCO Range Test Software. www.vemco.com 14 Jan 2015 DOC-5583-02 Contents 1 Preparing For Range Testing... 1 2 Installing the VEMCO Range Test Software... 1 3 Software Overview... 3 3.1
How to use the VEMCO Range Test Software. www.vemco.com 14 Jan 2015 DOC-5583-02 Contents 1 Preparing For Range Testing... 1 2 Installing the VEMCO Range Test Software... 1 3 Software Overview... 3 3.1
Ocean Surveyor / Ocean Observer
 Ocean Surveyor / Ocean Observer INSTALLATION GUIDE P/N 95A-6019-00 95A-6012-00 (April 2014) 2014 Teledyne RD Instruments, Inc. All rights reserved. Page ii TABLE OF CONTENTS CHAPTER 1 - AT A GLANCE...1
Ocean Surveyor / Ocean Observer INSTALLATION GUIDE P/N 95A-6019-00 95A-6012-00 (April 2014) 2014 Teledyne RD Instruments, Inc. All rights reserved. Page ii TABLE OF CONTENTS CHAPTER 1 - AT A GLANCE...1
Research Vessel Technical Enhancement Committee (RVTEC) November 2009 Meeting ISS - Integrated Survey Systems
 November 2009 Meeting ISS - Integrated Survey Systems") Research Vessel Technical Enhancement Committee (RVTEC) November 2009 Meeting ISS - Integrated Survey Systems John Kiernan, P.E. SAIC - Marine Science and Technology Division ISS-2000 Integrated Survey
Research Vessel Technical Enhancement Committee (RVTEC) November 2009 Meeting ISS - Integrated Survey Systems John Kiernan, P.E. SAIC - Marine Science and Technology Division ISS-2000 Integrated Survey
DEVICE CONFIGURATION INSTRUCTIONS
 WinFrog Device Group: Device Name/Model: Device Manufacturer: Device Data String(s) Output to WinFrog: WinFrog Data String(s) Output to Device: WinFrog Data Item(s) and their RAW record: GPS POS/MV (NMEA)
WinFrog Device Group: Device Name/Model: Device Manufacturer: Device Data String(s) Output to WinFrog: WinFrog Data String(s) Output to Device: WinFrog Data Item(s) and their RAW record: GPS POS/MV (NMEA)
OC3570 PROJECT REPORT: A COMPARISON OF COASTAL CURRENTS USING LAND BASED HF RADAR AND SHIP BOARD ADCP OBSERVATIONS. LCDR Steve Wall, RAN Winter 2007
 OC3570 PROJECT REPORT: A COMPARISON OF COASTAL CURRENTS USING LAND BASED HF RADAR AND SHIP BOARD ADCP OBSERVATIONS LCDR Steve Wall, RAN Winter 2007 Background High Frequency (HF) radar between 3 and 30MHz
OC3570 PROJECT REPORT: A COMPARISON OF COASTAL CURRENTS USING LAND BASED HF RADAR AND SHIP BOARD ADCP OBSERVATIONS LCDR Steve Wall, RAN Winter 2007 Background High Frequency (HF) radar between 3 and 30MHz
STANDARD OPERATING PROCEDURES SOP:: 2057 PAGE: 1 of 6 REV: 0.0 DATE: 07/11/03
 PAGE: 1 of 6 1.0 SCOPE AND APPLICATION 2.0 METHOD SUMMARY CONTENTS 3.0 SAMPLE PRESERVATION, CONTAINERS, HANDLING, AND STORAGE 4.0 INTERFERENCES AND POTENTIAL PROBLEMS 5.0 EQUIPMENT/APPARATUS 6.0 REAGENTS
PAGE: 1 of 6 1.0 SCOPE AND APPLICATION 2.0 METHOD SUMMARY CONTENTS 3.0 SAMPLE PRESERVATION, CONTAINERS, HANDLING, AND STORAGE 4.0 INTERFERENCES AND POTENTIAL PROBLEMS 5.0 EQUIPMENT/APPARATUS 6.0 REAGENTS
TD 304 OPERATING MANUAL Doppler Current Profiler Sensor December 2015 DCPS 5400 / 5402 / 5403
 TD 304 OPERATING MANUAL Doppler Current Profiler Sensor December 2015 Doppler Current Profiler Sensor DCPS 5400 / 5402 / 5403 Page 2 December 2015 TD 304 OPERATING MANUAL Doppler Current Profiler Sensor
TD 304 OPERATING MANUAL Doppler Current Profiler Sensor December 2015 Doppler Current Profiler Sensor DCPS 5400 / 5402 / 5403 Page 2 December 2015 TD 304 OPERATING MANUAL Doppler Current Profiler Sensor
Hydroacoustic Aided Inertial Navigation System - HAIN A New Reference for DP
 Return to Session Directory Return to Session Directory Doug Phillips Failure is an Option DYNAMIC POSITIONING CONFERENCE October 9-10, 2007 Sensors Hydroacoustic Aided Inertial Navigation System - HAIN
Return to Session Directory Return to Session Directory Doug Phillips Failure is an Option DYNAMIC POSITIONING CONFERENCE October 9-10, 2007 Sensors Hydroacoustic Aided Inertial Navigation System - HAIN
Principles of Operation A Practical Primer
 Acoustic Doppler Current Profiler Principles of Operation A Practical Primer Second Edition for Broadband ADCPs by: R. Lee Gordon 9855 Businesspark Ave. San Diego, California 92131 USA Phone: 619-693-1178
Acoustic Doppler Current Profiler Principles of Operation A Practical Primer Second Edition for Broadband ADCPs by: R. Lee Gordon 9855 Businesspark Ave. San Diego, California 92131 USA Phone: 619-693-1178
SonoLab Echo-I User Manual
 SonoLab Echo-I User Manual Overview: SonoLab Echo-I is a single board digital ultrasound pulse-echo solution. The system has a built in 50 volt high voltage generation circuit, a bipolar pulser, a transmit/receive
SonoLab Echo-I User Manual Overview: SonoLab Echo-I is a single board digital ultrasound pulse-echo solution. The system has a built in 50 volt high voltage generation circuit, a bipolar pulser, a transmit/receive
GyroPilot Mk1. Operator s Manual
 GyroPilot Mk1 Operator s Manual Table of Contents TABLE OF CONTENTS... 1 1 UNPACKING... 3 2 GYROPILOT OVERVIEW... 3 3 BEFORE USE... 3 3.1 CHARGING 3 4 OPERATING... 4 4.1 SWITCHING ON 4 4.2 LAPTOP CONNECTION
GyroPilot Mk1 Operator s Manual Table of Contents TABLE OF CONTENTS... 1 1 UNPACKING... 3 2 GYROPILOT OVERVIEW... 3 3 BEFORE USE... 3 3.1 CHARGING 3 4 OPERATING... 4 4.1 SWITCHING ON 4 4.2 LAPTOP CONNECTION
HF-Radar Network Near-Real Time Ocean Surface Current Mapping
 HF-Radar Network Near-Real Time Ocean Surface Current Mapping The HF-Radar Network (HFRNet) acquires surface ocean radial velocities measured by HF-Radar through a distributed network and processes the
HF-Radar Network Near-Real Time Ocean Surface Current Mapping The HF-Radar Network (HFRNet) acquires surface ocean radial velocities measured by HF-Radar through a distributed network and processes the
SPEEDBOX Technical Datasheet
 SPEEDBOX Technical Datasheet Race Technology Limited, 2008 Version 1.1 1. Introduction... 3 1.1. Product Overview... 3 1.2. Applications... 3 1.3. Standard Features... 3 2. Port / Connector details...
SPEEDBOX Technical Datasheet Race Technology Limited, 2008 Version 1.1 1. Introduction... 3 1.1. Product Overview... 3 1.2. Applications... 3 1.3. Standard Features... 3 2. Port / Connector details...
LBL POSITIONING AND COMMUNICATION SYSTEMS PRODUCT INFORMATION GUIDE
 LBL POSITIONING AND COMMUNICATION SYSTEMS PRODUCT INFORMATION GUIDE EvoLogics S2C LBL Underwater Positioning and Communication Systems EvoLogics LBL systems bring the benefi ts of long baseline (LBL) acoustic
LBL POSITIONING AND COMMUNICATION SYSTEMS PRODUCT INFORMATION GUIDE EvoLogics S2C LBL Underwater Positioning and Communication Systems EvoLogics LBL systems bring the benefi ts of long baseline (LBL) acoustic
Addendum 1.4_2. (Addendum to MX420 Operator s Manual)
") _2 (Addendum to MX420 ) September, 2007 Table of Contents About this document..1 MX575 Heading & Rate of Turn 2 MX575 as a D/GPS Compass only 2 MX575 as a D/GPS Compass with Navigation Functionality.....4
_2 (Addendum to MX420 ) September, 2007 Table of Contents About this document..1 MX575 Heading & Rate of Turn 2 MX575 as a D/GPS Compass only 2 MX575 as a D/GPS Compass with Navigation Functionality.....4
Generic Bathymetry Data - Interface Control Document
 Generic Bathymetry Data - Interface Control Document For WASSP Prepared by: Keith Fletcher Electronic Navigation Ltd October 15, 2013 Version 2.2 2013 by WASSP Ltd No part of this document should be reproduced
Generic Bathymetry Data - Interface Control Document For WASSP Prepared by: Keith Fletcher Electronic Navigation Ltd October 15, 2013 Version 2.2 2013 by WASSP Ltd No part of this document should be reproduced
Operating Handbook For FD PILOT SERIES AUTOPILOTS
 Operating Handbook For FD PILOT SERIES AUTOPILOTS TRUTRAK FLIGHT SYSTEMS 1500 S. Old Missouri Road Springdale, AR 72764 Ph. 479-751-0250 Fax 479-751-3397 Toll Free: 866-TRUTRAK 866-(878-8725) www.trutrakap.com
Operating Handbook For FD PILOT SERIES AUTOPILOTS TRUTRAK FLIGHT SYSTEMS 1500 S. Old Missouri Road Springdale, AR 72764 Ph. 479-751-0250 Fax 479-751-3397 Toll Free: 866-TRUTRAK 866-(878-8725) www.trutrakap.com
TROUBLE-SHOOTING: Error States
 TROUBLE-SHOOTING: Error States Please note, there is much commonality between the different models of LabelStation and therefore it is advisable to read the comments on other models if you cannot find
TROUBLE-SHOOTING: Error States Please note, there is much commonality between the different models of LabelStation and therefore it is advisable to read the comments on other models if you cannot find
CrossLoopPatterner User Guide
 CrossLoopPatterner User Guide 110.01.1609.UG Sep 23, 2016 CrossLoopPatterner converts antenna pattern measurements (LOOP) files and AIS measurements into SeaSonde antenna patterns which are used to obtain
CrossLoopPatterner User Guide 110.01.1609.UG Sep 23, 2016 CrossLoopPatterner converts antenna pattern measurements (LOOP) files and AIS measurements into SeaSonde antenna patterns which are used to obtain
RV Investigator CTD Processing Report
 RV Investigator CTD Processing Report Voyage #: Voyage title: IN2016_V02 SOTS: Southern Ocean Time Series automated moorings for climate and carbon cycle studies southwest of Tasmania Depart: Hobart, 1000
RV Investigator CTD Processing Report Voyage #: Voyage title: IN2016_V02 SOTS: Southern Ocean Time Series automated moorings for climate and carbon cycle studies southwest of Tasmania Depart: Hobart, 1000
FAQver. CARTER PRODUCTS. Laser Computer Pattern Projection Systems FREQUENTLY ASKEDQUESTIONS
 FAQver. CARTER PRODUCTS Laser Computer Pattern Projection Systems FREQUENTLY ASKEDQUESTIONS 2007 CARTER PRODUCTS COMPANY 2871 Northridge Drive NW Grand Rapids, MI 49544 Toll Free (888) 622-7837 Phone (616)
FAQver. CARTER PRODUCTS Laser Computer Pattern Projection Systems FREQUENTLY ASKEDQUESTIONS 2007 CARTER PRODUCTS COMPANY 2871 Northridge Drive NW Grand Rapids, MI 49544 Toll Free (888) 622-7837 Phone (616)
Suitable firmware can be found on Anritsu's web site under the instrument library listings.
 General Caution Please use a USB Memory Stick for firmware updates. Suitable firmware can be found on Anritsu's web site under the instrument library listings. If your existing firmware is older than v1.19,
General Caution Please use a USB Memory Stick for firmware updates. Suitable firmware can be found on Anritsu's web site under the instrument library listings. If your existing firmware is older than v1.19,
GPS Technologies in PPUs Clarifying some misunderstandings. A presentation to the Latin American Forum, September Peter Selwyn Chief Executive
 GPS Technologies in PPUs Clarifying some misunderstandings A presentation to the Latin American Forum, September 2013 Peter Selwyn Chief Executive Photo courtesy of Flinders Ports Our Company Our staff:
GPS Technologies in PPUs Clarifying some misunderstandings A presentation to the Latin American Forum, September 2013 Peter Selwyn Chief Executive Photo courtesy of Flinders Ports Our Company Our staff:
Corresponding author: Rebecca Woodgate,
 Correction of Teledyne Acoustic Doppler Current Profiler (ADCP) Bottom-Track Range Measurements for Instrument Pitch and Roll Rebecca A. Woodgate 1 and Alexander E. Holroyd 1 Applied Physics Laboratory,
Correction of Teledyne Acoustic Doppler Current Profiler (ADCP) Bottom-Track Range Measurements for Instrument Pitch and Roll Rebecca A. Woodgate 1 and Alexander E. Holroyd 1 Applied Physics Laboratory,
Utilizing Batch Processing for GNSS Signal Tracking
 Utilizing Batch Processing for GNSS Signal Tracking Andrey Soloviev Avionics Engineering Center, Ohio University Presented to: ION Alberta Section, Calgary, Canada February 27, 2007 Motivation: Outline
Utilizing Batch Processing for GNSS Signal Tracking Andrey Soloviev Avionics Engineering Center, Ohio University Presented to: ION Alberta Section, Calgary, Canada February 27, 2007 Motivation: Outline
Chapter 5. Clock Offset Due to Antenna Rotation
 Chapter 5. Clock Offset Due to Antenna Rotation 5. Introduction The goal of this experiment is to determine how the receiver clock offset from GPS time is affected by a rotating antenna. Because the GPS
Chapter 5. Clock Offset Due to Antenna Rotation 5. Introduction The goal of this experiment is to determine how the receiver clock offset from GPS time is affected by a rotating antenna. Because the GPS
PHINS, An All-In-One Sensor for DP Applications
 DYNAMIC POSITIONING CONFERENCE September 28-30, 2004 Sensors PHINS, An All-In-One Sensor for DP Applications Yves PATUREL IXSea (Marly le Roi, France) ABSTRACT DP positioning sensors are mainly GPS receivers
DYNAMIC POSITIONING CONFERENCE September 28-30, 2004 Sensors PHINS, An All-In-One Sensor for DP Applications Yves PATUREL IXSea (Marly le Roi, France) ABSTRACT DP positioning sensors are mainly GPS receivers
Phase Center Calibration and Multipath Test Results of a Digital Beam-Steered Antenna Array
 Phase Center Calibration and Multipath Test Results of a Digital Beam-Steered Antenna Array Kees Stolk and Alison Brown, NAVSYS Corporation BIOGRAPHY Kees Stolk is an engineer at NAVSYS Corporation working
Phase Center Calibration and Multipath Test Results of a Digital Beam-Steered Antenna Array Kees Stolk and Alison Brown, NAVSYS Corporation BIOGRAPHY Kees Stolk is an engineer at NAVSYS Corporation working
Statistical Pulse Measurements using USB Power Sensors
 Statistical Pulse Measurements using USB Power Sensors Today s modern USB Power Sensors are capable of many advanced power measurements. These Power Sensors are capable of demodulating the signal and processing
Statistical Pulse Measurements using USB Power Sensors Today s modern USB Power Sensors are capable of many advanced power measurements. These Power Sensors are capable of demodulating the signal and processing
Mean currents and turbulence, plus wave height, direction and ice tracking
 Mean currents and turbulence, plus wave height, direction and ice tracking The ADCP is designed for flexibility. It measures current profiles at up to 8 Hz sampling frequency. It can also measure direct
Mean currents and turbulence, plus wave height, direction and ice tracking The ADCP is designed for flexibility. It measures current profiles at up to 8 Hz sampling frequency. It can also measure direct
Standardised procedures for acoustic data collection as part of an integrated marine observing system (IMOS)
") Standardised procedures for acoustic data collection as part of an integrated marine observing system (IMOS) Tim Ryan, Rudy Kloser, Gordon Keith and Caroline Sutton CSIRO Marine and Atmospheric Research
Standardised procedures for acoustic data collection as part of an integrated marine observing system (IMOS) Tim Ryan, Rudy Kloser, Gordon Keith and Caroline Sutton CSIRO Marine and Atmospheric Research
MAKING TRANSIENT ANTENNA MEASUREMENTS
 MAKING TRANSIENT ANTENNA MEASUREMENTS Roger Dygert, Steven R. Nichols MI Technologies, 1125 Satellite Boulevard, Suite 100 Suwanee, GA 30024-4629 ABSTRACT In addition to steady state performance, antennas
MAKING TRANSIENT ANTENNA MEASUREMENTS Roger Dygert, Steven R. Nichols MI Technologies, 1125 Satellite Boulevard, Suite 100 Suwanee, GA 30024-4629 ABSTRACT In addition to steady state performance, antennas
Co-ReSyF RA lecture: Vessel detection and oil spill detection
 This project has received funding from the European Union s Horizon 2020 Research and Innovation Programme under grant agreement no 687289 Co-ReSyF RA lecture: Vessel detection and oil spill detection
This project has received funding from the European Union s Horizon 2020 Research and Innovation Programme under grant agreement no 687289 Co-ReSyF RA lecture: Vessel detection and oil spill detection
WinFrog Device Group:
 WinFrog Device Group: Device Name/Model: Device Manufacturer: Device Data String(s) Output to WinFrog: WinFrog Data String(s) Output to Device: WinFrog Data Item(s) and their RAW record: GPS NMEA GPS National
WinFrog Device Group: Device Name/Model: Device Manufacturer: Device Data String(s) Output to WinFrog: WinFrog Data String(s) Output to Device: WinFrog Data Item(s) and their RAW record: GPS NMEA GPS National
VMS-4000 Digital Seismograph System - Reference Manual
 VMS-4000 Digital Seismograph System - Reference Manual This equipment should be installed, maintained and operated by technically qualified personnel. Any errors or omissions in data or it s interpretations,
VMS-4000 Digital Seismograph System - Reference Manual This equipment should be installed, maintained and operated by technically qualified personnel. Any errors or omissions in data or it s interpretations,
Continuous High Precision Navigation Using MEMS Inertial Sensors Aided RTK GPS for Mobile Mapping Applications
 Continuous High Precision Navigation Using MEMS Inertial Sensors Aided RTK GPS for Mobile Mapping Applications Yong Li 1, Augustine Tsai 2, Peter Mumford 1, Wei-sen Lin 2, I-chou Hong 2 1 School of Surveying
Continuous High Precision Navigation Using MEMS Inertial Sensors Aided RTK GPS for Mobile Mapping Applications Yong Li 1, Augustine Tsai 2, Peter Mumford 1, Wei-sen Lin 2, I-chou Hong 2 1 School of Surveying
Stalker Speed Sensor II Traffic Statistics Sensor Manual rev A
 Stalker Speed Sensor II Traffic Statistics Sensor Manual 011-0132-00 rev A Applied Concepts, Inc. 2609 Technology Drive Plano, Texas 75074 972-398-3780 ii Applied Concepts TRAFFIC STATISTICS SPEED SENSOR
Stalker Speed Sensor II Traffic Statistics Sensor Manual 011-0132-00 rev A Applied Concepts, Inc. 2609 Technology Drive Plano, Texas 75074 972-398-3780 ii Applied Concepts TRAFFIC STATISTICS SPEED SENSOR
Real-time current profiles and directional waves for intermediate water
 Real-time current profiles and directional waves for intermediate water The AWAC 600 khz ADCP has become the standard reference technology in submerged wavemeasurement applications. Thousands of these
Real-time current profiles and directional waves for intermediate water The AWAC 600 khz ADCP has become the standard reference technology in submerged wavemeasurement applications. Thousands of these
Sutron SatLink2 Troubleshooting Instructions
 Sutron SatLink2 Troubleshooting Instructions A. SatLink2 (SL2) symptoms: Missing or partial data on LRGS (check DIS-MSG for frequency and EIRP; use HDR DCP Message header list. B. Equipment and tools needed:
Sutron SatLink2 Troubleshooting Instructions A. SatLink2 (SL2) symptoms: Missing or partial data on LRGS (check DIS-MSG for frequency and EIRP; use HDR DCP Message header list. B. Equipment and tools needed:
Three-dimensional investigation of buried structures with multi-transducer parametric sub-bottom profiler as part of hydrographical applications
 Three-dimensional investigation of buried structures with multi-transducer parametric sub-bottom profiler as part Jens LOWAG, Germany, Dr. Jens WUNDERLICH, Germany, Peter HUEMBS, Germany Key words: parametric,
Three-dimensional investigation of buried structures with multi-transducer parametric sub-bottom profiler as part Jens LOWAG, Germany, Dr. Jens WUNDERLICH, Germany, Peter HUEMBS, Germany Key words: parametric,
APPLICATION BULLETIN. SERIAL BACKGROUNDER (Serial 101) AB23-1. ICS ICS ELECTRONICS division of Systems West Inc. INTRODUCTION CHAPTER 2 - DATA FORMAT
 AB23-1. ICS ICS ELECTRONICS division of Systems West Inc. INTRODUCTION CHAPTER 2 - DATA FORMAT") ICS ICS ELECTRONICS division of Systems West Inc. AB- APPLICATION BULLETIN SERIAL BACKGROUNDER (Serial 0) INTRODUCTION Serial data communication is the most common means of transmitting data from one point
ICS ICS ELECTRONICS division of Systems West Inc. AB- APPLICATION BULLETIN SERIAL BACKGROUNDER (Serial 0) INTRODUCTION Serial data communication is the most common means of transmitting data from one point
Quick Start. Tersus GNSS Center. Configuration Tools for Tersus GNSS RTK Systems.
 Quick Start Tersus GNSS Center Configuration Tools for Tersus GNSS RTK Systems www.tersus-gnss.com July, 2016 1. Quick Start Guide of Tersus GNSS Center This quick start guide provides the basic information
Quick Start Tersus GNSS Center Configuration Tools for Tersus GNSS RTK Systems www.tersus-gnss.com July, 2016 1. Quick Start Guide of Tersus GNSS Center This quick start guide provides the basic information
Progress Report. Mohammadtaghi G. Poshtmashhadi. Supervisor: Professor António M. Pascoal
 Progress Report Mohammadtaghi G. Poshtmashhadi Supervisor: Professor António M. Pascoal OceaNet meeting presentation April 2017 2 Work program Main Research Topic Autonomous Marine Vehicle Control and
Progress Report Mohammadtaghi G. Poshtmashhadi Supervisor: Professor António M. Pascoal OceaNet meeting presentation April 2017 2 Work program Main Research Topic Autonomous Marine Vehicle Control and
One connected to the trainer port, MagTrack should be configured, please see Configuration section on this manual.
 MagTrack R Head Tracking System Instruction Manual ABSTRACT MagTrack R is a magnetic Head Track system intended to be used for FPV flight. The system measures the components of the magnetic earth field
MagTrack R Head Tracking System Instruction Manual ABSTRACT MagTrack R is a magnetic Head Track system intended to be used for FPV flight. The system measures the components of the magnetic earth field
The Signature VM package delivers vessel-mounted AD2CP capabilities based on present-day technology
 The package delivers vessel-mounted AD2CP capabilities based on present-day technology Until now, ADCP current surveys have been complex and time-consuming processes. A successful current survey depends
The package delivers vessel-mounted AD2CP capabilities based on present-day technology Until now, ADCP current surveys have been complex and time-consuming processes. A successful current survey depends
igpsdevice: A MOOS Driver for GPS Devices
 igpsdevice: A MOOS Driver for GPS Devices Fall 2017 Alon Yaari, ayaari@mit.edu Michael Benjamin, mikerb@mit.edu Department of Mechanical Engineering, CSAIL MIT, Cambridge MA 02139 1 igpsdevice: A MOOS
igpsdevice: A MOOS Driver for GPS Devices Fall 2017 Alon Yaari, ayaari@mit.edu Michael Benjamin, mikerb@mit.edu Department of Mechanical Engineering, CSAIL MIT, Cambridge MA 02139 1 igpsdevice: A MOOS
Teledyne PDS. Monopile Placement - Laser scan position. Version March 2017
 Monopile Placement - Laser scan position Teledyne PDS Version 2.3.1 March 2017 Teledyne RESON B.V. Stuttgartstraat 42-44 3047 AS Rotterdam The Netherlands Tel.: +31 (0)10 245 15 00 www.teledyne-reson.com
Monopile Placement - Laser scan position Teledyne PDS Version 2.3.1 March 2017 Teledyne RESON B.V. Stuttgartstraat 42-44 3047 AS Rotterdam The Netherlands Tel.: +31 (0)10 245 15 00 www.teledyne-reson.com
SPAN Technology System Characteristics and Performance
 SPAN Technology System Characteristics and Performance NovAtel Inc. ABSTRACT The addition of inertial technology to a GPS system provides multiple benefits, including the availability of attitude output
SPAN Technology System Characteristics and Performance NovAtel Inc. ABSTRACT The addition of inertial technology to a GPS system provides multiple benefits, including the availability of attitude output
INSTALLATION & MAINTENANCE
 ADVANTAGES High measurement precision of surface velocity due to advanced radar technology Fast installation above the surface, no complex construction works, or flow shutdown required 24/7 real-time monitoring
ADVANTAGES High measurement precision of surface velocity due to advanced radar technology Fast installation above the surface, no complex construction works, or flow shutdown required 24/7 real-time monitoring
Field Service Procedure PCU Kit, XX97, XX97A & XX00
 1. Brief Summary: Troubleshooting document for diagnosing a fault with and replacing the PCU assembly on the XX97, XX97A and XX00 series antennas. 2. Checklist: Verify Initialization N0 Parameter Pedestal
1. Brief Summary: Troubleshooting document for diagnosing a fault with and replacing the PCU assembly on the XX97, XX97A and XX00 series antennas. 2. Checklist: Verify Initialization N0 Parameter Pedestal
Development and Application of 500MSPS Digitizer for High Resolution Ultrasonic Measurements
 Indian Society for Non-Destructive Testing Hyderabad Chapter Proc. National Seminar on Non-Destructive Evaluation Dec. 7-9, 2006, Hyderabad Development and Application of 500MSPS Digitizer for High Resolution
Indian Society for Non-Destructive Testing Hyderabad Chapter Proc. National Seminar on Non-Destructive Evaluation Dec. 7-9, 2006, Hyderabad Development and Application of 500MSPS Digitizer for High Resolution
_ Programming Manual RE729 Including Classic and New VoX Interfaces Version 3.0 May 2011
 _ Programming Manual RE729 Including Classic and New VoX Interfaces Version 3.0 May 2011 RE729 Programming Manual to PSWx29 VoX.docx - 1 - 1 Content 1 Content... 2 2 Introduction... 2 2.1 Quick Start Instructions...
_ Programming Manual RE729 Including Classic and New VoX Interfaces Version 3.0 May 2011 RE729 Programming Manual to PSWx29 VoX.docx - 1 - 1 Content 1 Content... 2 2 Introduction... 2 2.1 Quick Start Instructions...
Decoding Galileo and Compass
 Decoding Galileo and Compass Grace Xingxin Gao The GPS Lab, Stanford University June 14, 2007 What is Galileo System? Global Navigation Satellite System built by European Union The first Galileo test satellite
Decoding Galileo and Compass Grace Xingxin Gao The GPS Lab, Stanford University June 14, 2007 What is Galileo System? Global Navigation Satellite System built by European Union The first Galileo test satellite
Hydrofest The Hydrographic Society in Scotland
 Hydrofest 2017 The Hydrographic Society in Scotland POSITIONING SYSTEMS Eddie Milne 1. GNSS Positioning 2. Additional Sensors 3. Alternative Positioning 4. Bringing it altogether GNSS = GPS + Glonass +
Hydrofest 2017 The Hydrographic Society in Scotland POSITIONING SYSTEMS Eddie Milne 1. GNSS Positioning 2. Additional Sensors 3. Alternative Positioning 4. Bringing it altogether GNSS = GPS + Glonass +
Digiflight II SERIES AUTOPILOTS
 Operating Handbook For Digiflight II SERIES AUTOPILOTS TRUTRAK FLIGHT SYSTEMS 1500 S. Old Missouri Road Springdale, AR 72764 Ph. 479-751-0250 Fax 479-751-3397 Toll Free: 866-TRUTRAK 866-(878-8725) www.trutrakap.com
Operating Handbook For Digiflight II SERIES AUTOPILOTS TRUTRAK FLIGHT SYSTEMS 1500 S. Old Missouri Road Springdale, AR 72764 Ph. 479-751-0250 Fax 479-751-3397 Toll Free: 866-TRUTRAK 866-(878-8725) www.trutrakap.com
Touch Probe Cycles TNC 426 TNC 430
 Touch Probe Cycles TNC 426 TNC 430 NC Software 280 472-xx 280 473-xx 280 474-xx 280 475-xx 280 476-xx 280 477-xx User s Manual English (en) 6/2003 TNC Model, Software and Features This manual describes
Touch Probe Cycles TNC 426 TNC 430 NC Software 280 472-xx 280 473-xx 280 474-xx 280 475-xx 280 476-xx 280 477-xx User s Manual English (en) 6/2003 TNC Model, Software and Features This manual describes
Multibeam data quality assurance at Genavir. Karine Abel Michaux
 Multibeam data quality assurance at Genavir Hervé Bisquay hbisquay@genavir.fr Karine Abel Michaux kabelmic@genavir.fr Pascal Viollette pviollette@genavir.fr GENAVIR Genavir is the operator of the civilian
Multibeam data quality assurance at Genavir Hervé Bisquay hbisquay@genavir.fr Karine Abel Michaux kabelmic@genavir.fr Pascal Viollette pviollette@genavir.fr GENAVIR Genavir is the operator of the civilian
Technical Report Analysis of SSMIS data. Eva Howe. Copenhagen page 1 of 16
 Analysis of SSMIS data Eva Howe Copenhagen 9 www.dmi.dk/dmi/tr08-07 page 1 of 16 Colophon Serial title: Technical Report 08-07 Title: Analysis of SSMIS data Subtitle: Author(s): Eva Howe Other contributors:
Analysis of SSMIS data Eva Howe Copenhagen 9 www.dmi.dk/dmi/tr08-07 page 1 of 16 Colophon Serial title: Technical Report 08-07 Title: Analysis of SSMIS data Subtitle: Author(s): Eva Howe Other contributors:
ISIS A beginner s guide
 ISIS A beginner s guide Conceived of and written by Christian Buil, ISIS is a powerful astronomical spectral processing application that can appear daunting to first time users. While designed as a comprehensive
ISIS A beginner s guide Conceived of and written by Christian Buil, ISIS is a powerful astronomical spectral processing application that can appear daunting to first time users. While designed as a comprehensive
MAE 126A Winter Quarter Environmental and Mechanical Engineering Laboratory. Atmospheric Turbulence Measurement
 MAE 126A Winter Quarter 2013 (Anirban Garai, Jan Kleissl) Environmental and Mechanical Engineering Laboratory Atmospheric Turbulence Measurement General description In this experiment, you will measure
MAE 126A Winter Quarter 2013 (Anirban Garai, Jan Kleissl) Environmental and Mechanical Engineering Laboratory Atmospheric Turbulence Measurement General description In this experiment, you will measure
GyroPilot V3. Operator s Manual
 GyroPilot V3 Operator s Manual TABLE OF CONENTS 1 UNPACKING... 3 2 PRODUCT OVERVIEW... 3 3 BEFORE USE... 3 3.1 CHARGING INSTRUCTIONS 3 4 USAGE... 4 4.1 SWITCHING ON 4 4.2 CONNECTIVITY 4 4.3 NORMAL OPERATION
GyroPilot V3 Operator s Manual TABLE OF CONENTS 1 UNPACKING... 3 2 PRODUCT OVERVIEW... 3 3 BEFORE USE... 3 3.1 CHARGING INSTRUCTIONS 3 4 USAGE... 4 4.1 SWITCHING ON 4 4.2 CONNECTIVITY 4 4.3 NORMAL OPERATION
Quick start guide M3 Sonar
 Quick start guide M3 Sonar Creating an image mosaic using Photoshop and Geographic Imager 2013, Kongsberg Mesotech Ltd. 922-20007005 M3 Sonar Quick start guide Creating an image mosaic using Photoshop
Quick start guide M3 Sonar Creating an image mosaic using Photoshop and Geographic Imager 2013, Kongsberg Mesotech Ltd. 922-20007005 M3 Sonar Quick start guide Creating an image mosaic using Photoshop
SX-NSR 2.0 A Multi-frequency and Multi-sensor Software Receiver with a Quad-band RF Front End
 SX-NSR 2.0 A Multi-frequency and Multi-sensor Software Receiver with a Quad-band RF Front End - with its use for Reflectometry - N. Falk, T. Hartmann, H. Kern, B. Riedl, T. Pany, R. Wolf, J.Winkel, IFEN
SX-NSR 2.0 A Multi-frequency and Multi-sensor Software Receiver with a Quad-band RF Front End - with its use for Reflectometry - N. Falk, T. Hartmann, H. Kern, B. Riedl, T. Pany, R. Wolf, J.Winkel, IFEN
Chapter 6. Temperature Effects
 Chapter 6. Temperature Effects 6.1 Introduction This chapter documents the investigation into temperature drifts that can cause a receiver clock bias even when a stable reference is used. The first step
Chapter 6. Temperature Effects 6.1 Introduction This chapter documents the investigation into temperature drifts that can cause a receiver clock bias even when a stable reference is used. The first step
Instromet Weather Systems Ltd. Climatica Weather Station User Guide
 Instromet Weather Systems Ltd Climatica Weather Station User Guide Contents: 1) Introduction 2) Specifications 3) Package Contents 4) Installation 5) Operating instructions 6) Multi Weather display Features
Instromet Weather Systems Ltd Climatica Weather Station User Guide Contents: 1) Introduction 2) Specifications 3) Package Contents 4) Installation 5) Operating instructions 6) Multi Weather display Features
A Bistatic HF Radar for Current Mapping and Robust Ship Tracking
 A Bistatic HF Radar for Current Mapping and Robust Ship Tracking Dennis Trizna Imaging Science Research, Inc. V. 703-801-1417 dennis @ isr-sensing.com www.isr-sensing.com Objective: Develop methods for
A Bistatic HF Radar for Current Mapping and Robust Ship Tracking Dennis Trizna Imaging Science Research, Inc. V. 703-801-1417 dennis @ isr-sensing.com www.isr-sensing.com Objective: Develop methods for
What is CCD Commander?
 Matt Thomas What is CCD Commander? Multi-target imaging automation tool Controls all aspects of the imaging system Camera (Imaging and Guiding); Mount (Fork or GEM) Dome/Roll-of-roof; Focuser; Rotator;
Matt Thomas What is CCD Commander? Multi-target imaging automation tool Controls all aspects of the imaging system Camera (Imaging and Guiding); Mount (Fork or GEM) Dome/Roll-of-roof; Focuser; Rotator;
PalmGauss SC PGSC-5G. Instruction Manual
 PalmGauss SC PGSC-5G Instruction Manual PalmGauss SC PGSC 5G Instruction Manual Thank you very much for purchasing our products. Please, read this instruction manual in order to use our product in safety
PalmGauss SC PGSC-5G Instruction Manual PalmGauss SC PGSC 5G Instruction Manual Thank you very much for purchasing our products. Please, read this instruction manual in order to use our product in safety
Broadband Temporal Coherence Results From the June 2003 Panama City Coherence Experiments
 Broadband Temporal Coherence Results From the June 2003 Panama City Coherence Experiments H. Chandler*, E. Kennedy*, R. Meredith*, R. Goodman**, S. Stanic* *Code 7184, Naval Research Laboratory Stennis
Broadband Temporal Coherence Results From the June 2003 Panama City Coherence Experiments H. Chandler*, E. Kennedy*, R. Meredith*, R. Goodman**, S. Stanic* *Code 7184, Naval Research Laboratory Stennis
MODEL ULTRASONIC ANEMOMETER
 MODEL 81000 ULTRASONIC ANEMOMETER May 2002 1. MODEL 81000 ULTRASONIC ANEMOMETER 2.0 INTRODUCTION The Young Model 81000 measures three dimensional wind velocity based on the transit time of ultrasonic acoustic
MODEL 81000 ULTRASONIC ANEMOMETER May 2002 1. MODEL 81000 ULTRASONIC ANEMOMETER 2.0 INTRODUCTION The Young Model 81000 measures three dimensional wind velocity based on the transit time of ultrasonic acoustic
Aircraft Scatter Propagation on 10 GHz using JT65C
 Aircraft Scatter Propagation on 10 GHz using JT65C Results of initial Tests over a 624 km Path By Rex Moncur VK7MO and David Smith VK3HZ This is an initial report of our first tests of 10 GHz propagation
Aircraft Scatter Propagation on 10 GHz using JT65C Results of initial Tests over a 624 km Path By Rex Moncur VK7MO and David Smith VK3HZ This is an initial report of our first tests of 10 GHz propagation
ArcGIS Apps and GPS GNSS Connections. By: Colin Lawrence and Kiersten Hudson
 ArcGIS Apps and GPS GNSS Connections By: Colin Lawrence and Kiersten Hudson Agenda ArcGIS Apps and high accuracy data The importance of high accuracy data Making connections to external receivers Bringing
ArcGIS Apps and GPS GNSS Connections By: Colin Lawrence and Kiersten Hudson Agenda ArcGIS Apps and high accuracy data The importance of high accuracy data Making connections to external receivers Bringing
Integration of GPS with a Rubidium Clock and a Barometer for Land Vehicle Navigation
 Integration of GPS with a Rubidium Clock and a Barometer for Land Vehicle Navigation Zhaonian Zhang, Department of Geomatics Engineering, The University of Calgary BIOGRAPHY Zhaonian Zhang is a MSc student
Integration of GPS with a Rubidium Clock and a Barometer for Land Vehicle Navigation Zhaonian Zhang, Department of Geomatics Engineering, The University of Calgary BIOGRAPHY Zhaonian Zhang is a MSc student
TS-WS-07 Wireless Indoor/Outdoor 8-Channel Thermo-Hygrometer with Jumbo Display User Manual
 TS-WS-07 Wireless Indoor/Outdoor 8-Channel Thermo-Hygrometer with Jumbo Display User Manual Table of Contents 1. Introduction......2 2.Getting Started.....2 2.1 Parts List.......2 2.2 Recommend Tools.........2
TS-WS-07 Wireless Indoor/Outdoor 8-Channel Thermo-Hygrometer with Jumbo Display User Manual Table of Contents 1. Introduction......2 2.Getting Started.....2 2.1 Parts List.......2 2.2 Recommend Tools.........2
Acoustic Doppler Current Profiler (ADCP): Principles of Operation and Setup
: Principles of Operation and Setup") SMARTSkills Workshop for Vessel Users and Researchers, Marine Institute, Galway 29th April 2016 Acoustic Doppler Current Profiler (ADCP): Principles of Operation and Setup Christian Mohn & Martin White
SMARTSkills Workshop for Vessel Users and Researchers, Marine Institute, Galway 29th April 2016 Acoustic Doppler Current Profiler (ADCP): Principles of Operation and Setup Christian Mohn & Martin White
Tutorial: Creating maze games
 Tutorial: Creating maze games Copyright 2003, Mark Overmars Last changed: March 22, 2003 (finished) Uses: version 5.0, advanced mode Level: Beginner Even though Game Maker is really simple to use and creating
Tutorial: Creating maze games Copyright 2003, Mark Overmars Last changed: March 22, 2003 (finished) Uses: version 5.0, advanced mode Level: Beginner Even though Game Maker is really simple to use and creating
Acoustic Resonance Classification of Swimbladder-Bearing Fish
 Acoustic Resonance Classification of Swimbladder-Bearing Fish Timothy K. Stanton and Dezhang Chu Applied Ocean Physics and Engineering Department Woods Hole Oceanographic Institution Bigelow 201, MS #11
Acoustic Resonance Classification of Swimbladder-Bearing Fish Timothy K. Stanton and Dezhang Chu Applied Ocean Physics and Engineering Department Woods Hole Oceanographic Institution Bigelow 201, MS #11
Aquadopp Profiler 2 MHz
 Small and compact, short-range current profiling; option for PUV wave measurements The Aquadopp Profiler is a highly versatile Acoustic Doppler Current Profiler (ADCP) available in four profiling range
Small and compact, short-range current profiling; option for PUV wave measurements The Aquadopp Profiler is a highly versatile Acoustic Doppler Current Profiler (ADCP) available in four profiling range
Houston Radar LLC. Installation and User Manual For. Doppler Radar DR-1500
 Houston Radar LLC Installation and User Manual For Doppler Radar DR-1500 Houston Radar LLC 13814 Sherburn Manor Dr. Cypress.TX Http://www.Houston-Radar.com Email: sales@houston-radar.com Contact: (281)
Houston Radar LLC Installation and User Manual For Doppler Radar DR-1500 Houston Radar LLC 13814 Sherburn Manor Dr. Cypress.TX Http://www.Houston-Radar.com Email: sales@houston-radar.com Contact: (281)
Prototype Software-based Receiver for Remote Sensing using Reflected GPS Signals. Dinesh Manandhar The University of Tokyo
 Prototype Software-based Receiver for Remote Sensing using Reflected GPS Signals Dinesh Manandhar The University of Tokyo dinesh@qzss.org 1 Contents Background Remote Sensing Capability System Architecture
Prototype Software-based Receiver for Remote Sensing using Reflected GPS Signals Dinesh Manandhar The University of Tokyo dinesh@qzss.org 1 Contents Background Remote Sensing Capability System Architecture
Chapter 6 Title Blocks
 Chapter 6 Title Blocks In previous exercises, every drawing started by creating a number of layers. This is time consuming and unnecessary. In this exercise, we will start a drawing by defining layers
Chapter 6 Title Blocks In previous exercises, every drawing started by creating a number of layers. This is time consuming and unnecessary. In this exercise, we will start a drawing by defining layers
NEMO - NIXIE Enhanced Modular Option Surface Ship Torpedo Defense (SSTD) Program Update Test Results
 Program Update Test Results") NEMO - NIXIE Enhanced Modular Option Surface Ship Torpedo Defense (SSTD) Program Update Test Results John P. Fumo, CTO ArgonST, Inc 12701 Fair Lakes Circle, Fairfax, VA 22033 Abstract NIXIE Enhanced Modular
NEMO - NIXIE Enhanced Modular Option Surface Ship Torpedo Defense (SSTD) Program Update Test Results John P. Fumo, CTO ArgonST, Inc 12701 Fair Lakes Circle, Fairfax, VA 22033 Abstract NIXIE Enhanced Modular
Simrad R5000 IMO/Solas Type Approved Radar Systems
 Simrad R5000 IMO/Solas Type Approved Radar Systems R5000 www.navico.com/commercial R5000 Radar Systems SIMRAD R5000 Radar Systems feature a modular plug & play design making it easy to create a cost effective
Simrad R5000 IMO/Solas Type Approved Radar Systems R5000 www.navico.com/commercial R5000 Radar Systems SIMRAD R5000 Radar Systems feature a modular plug & play design making it easy to create a cost effective
Recording EPR spectra using the Loop Gap Resonator (LGR)
") Recording EPR spectra using the Loop Gap Resonator (LGR) This protocol gives step-by-step instructions for recording EPR spectra of spin labeled proteins (Nitroxide label like MTSSL) using the LGR assuming
Recording EPR spectra using the Loop Gap Resonator (LGR) This protocol gives step-by-step instructions for recording EPR spectra of spin labeled proteins (Nitroxide label like MTSSL) using the LGR assuming
Touch Probe Cycles itnc 530
 Touch Probe Cycles itnc 530 NC Software 340 420-xx 340 421-xx User s Manual English (en) 4/2002 TNC Models, Software and Features This manual describes functions and features provided by the TNCs as of
Touch Probe Cycles itnc 530 NC Software 340 420-xx 340 421-xx User s Manual English (en) 4/2002 TNC Models, Software and Features This manual describes functions and features provided by the TNCs as of
Advances in Antenna Measurement Instrumentation and Systems
 Advances in Antenna Measurement Instrumentation and Systems Steven R. Nichols, Roger Dygert, David Wayne MI Technologies Suwanee, Georgia, USA Abstract Since the early days of antenna pattern recorders,
Advances in Antenna Measurement Instrumentation and Systems Steven R. Nichols, Roger Dygert, David Wayne MI Technologies Suwanee, Georgia, USA Abstract Since the early days of antenna pattern recorders,
How to make a line graph
 How to make a line graph Line graphs are powerful in science because of the relationship they show between two variables (showing how one variable changes as the other changes). Step One You need the topic
How to make a line graph Line graphs are powerful in science because of the relationship they show between two variables (showing how one variable changes as the other changes). Step One You need the topic
KM-4800w. Copy/Scan Operation Manual
 KM-4800w Copy/Scan Operation Manual NOTE: This Operation Manual contains information that corresponds to using both the metric and inch versions of these machines. The metric versions of these machines
KM-4800w Copy/Scan Operation Manual NOTE: This Operation Manual contains information that corresponds to using both the metric and inch versions of these machines. The metric versions of these machines
Standard Operating Procedure
 Standard Operating Procedure Nanosurf Atomic Force Microscopy Operation Facility NCCRD Nanotechnology Center for Collaborative Research and Development Department of Chemistry and Engineering Physics The
Standard Operating Procedure Nanosurf Atomic Force Microscopy Operation Facility NCCRD Nanotechnology Center for Collaborative Research and Development Department of Chemistry and Engineering Physics The
ADITEL MARINE ELECTRONICS
 The famous KW950 - E DATA REPEATER AND MULTI-FUNCTION INTERFACE ADITEL MARINE ELECTRONICS KW950 E DATA REPEATER AND INTERFACE TECHNICAL MANUAL KW950E3.DOC or PDF 1: Contents page CONTENTS 2: The KW950E
The famous KW950 - E DATA REPEATER AND MULTI-FUNCTION INTERFACE ADITEL MARINE ELECTRONICS KW950 E DATA REPEATER AND INTERFACE TECHNICAL MANUAL KW950E3.DOC or PDF 1: Contents page CONTENTS 2: The KW950E