Intro to Automation and Controls by: P. Ribeiro Calvin College
|
|
|
- Basil Cox
- 5 years ago
- Views:
Transcription
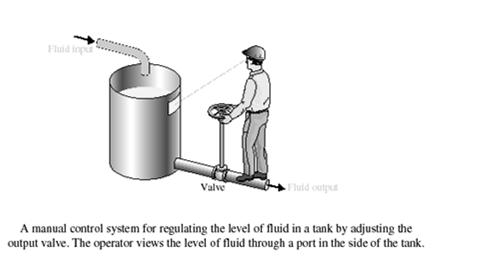
1 Intro to Automation and Controls by: P. Ribeiro Calvin College Link: Chapter 1: Introduction to Control Systems Objectives In this chapter we describe a general process for designing a control system. A control system consisting of interconnected components is designed to achieve a desired purpose. To understand the purpose of a control system, it is useful to examine examples of control systems through the course of history. These early systems incorporated many of the same ideas of feedback that are in use today. Modern control engineering practice includes the use of control design strategies for improving manufacturing processes, the efficiency of energy use, advanced automobile control, including rapid transit, among others. We also discuss the notion of a design gap. The gap exists between the complex physical system under investigation and the model used in the control system synthesis. The iterative nature of design allows us to handle the design gap effectively while accomplishing necessary tradeoffs in complexity, performance, and cost in order to meet the design specifications. Introduction System An interconnection of elements and devices for a desired purpose. Control System An interconnection of components forming a system configuration that will provide a desired response. Process The device, plant, or system under control. The input and output relationship represents the cause-andeffect relationship of the process. 1

 See: https://www.youtube.com/watch?")
2 Introduction Open-Loop Control Systems utilize a controller or control actuator to obtain the desired response. Closed-Loop Control Systems utilizes feedback to compare the actual output to the desired output response. Multivariable Control System History Greece (BC) Float regulator mechanism Holland (16 th Century) Temperature regulator Watt s Flyball Governor (18 th century) See: History Water-level float regulator 2

3 History History 18th Century James Watt s centrifugal governor for the speed control of a steam engine. 1920s Minorsky worked on automatic controllers for steering ships. 1930s Nyquist developed a method for analyzing the stability of controlled systems 1940s Frequency response methods made it possible to design linear closed-loop control systems 1950s Root-locus method due to Evans was fully developed 1960s State space methods, optimal control, adaptive control and 1980s Learning controls are begun to investigated and developed. Present and on-going research fields. Recent application of modern control theory includes such non-engineering systems such as biological, biomedical, economic and socio-economic systems??????????????????????????????????? (a) Automobile steering control system. (b) The driver uses the difference between the actual and the desired direction of travel to generate a controlled adjustment of the steering wheel. (c) Typical directionof-travel response. 3
4 4
5 5


6 The Future of Control Systems 6

7 The Future of Control Systems Control System Design 7

8 Design Example Design Example Design Example 8
9 Design Example F-22 Raptor Crash Landing References, and Resources 9
Chapter 1: Introduction to Control Systems Objectives
 Chapter 1: Introduction to Control Systems Objectives In this chapter we describe a general process for designing a control system. A control system consisting of interconnected components is designed
Chapter 1: Introduction to Control Systems Objectives In this chapter we describe a general process for designing a control system. A control system consisting of interconnected components is designed
Biomedical Control Systems. Lecture#01
 1 Biomedical Control Systems Lecture#01 2 Text Books Modern Control Engineering, 5 th Edition; Ogata. Feedback & Control Systems, 2 nd edition; Schaum s outline, Joseph J, Allen R. Control Systems Engineering,
1 Biomedical Control Systems Lecture#01 2 Text Books Modern Control Engineering, 5 th Edition; Ogata. Feedback & Control Systems, 2 nd edition; Schaum s outline, Joseph J, Allen R. Control Systems Engineering,
Lecture#1 Handout. Plant has one or more inputs and one or more outputs, which can be represented by a block, as shown below.
 Lecture#1 Handout Introduction A system or a process or a plant is a segment of environment that is under consideration (working definition). Control is a term that describes the process of forcing a system
Lecture#1 Handout Introduction A system or a process or a plant is a segment of environment that is under consideration (working definition). Control is a term that describes the process of forcing a system
Executive Summary. Chapter 1. Overview of Control
 Chapter 1 Executive Summary Rapid advances in computing, communications, and sensing technology offer unprecedented opportunities for the field of control to expand its contributions to the economic and
Chapter 1 Executive Summary Rapid advances in computing, communications, and sensing technology offer unprecedented opportunities for the field of control to expand its contributions to the economic and
LINEAR CONTROL SYSTEMS
 LINEAR CONTROL SYSTEMS Ali Karimpour Associate Professor Ferdowsi Uniersity of Mashhad Prerequisite English Knowledge Primary Mathematics MATLAB Software 2 Syllabus An Introduction to Linear Control Systems.(Lecture
LINEAR CONTROL SYSTEMS Ali Karimpour Associate Professor Ferdowsi Uniersity of Mashhad Prerequisite English Knowledge Primary Mathematics MATLAB Software 2 Syllabus An Introduction to Linear Control Systems.(Lecture
Introduction to Control Systems
 Introduction to Control Systems MEM 355 Performance Enhancement of Dynamical Systems Harry G. Kwatny Department of Mechanical Engineering & Mechanics Drexel University Outline Course practical information
Introduction to Control Systems MEM 355 Performance Enhancement of Dynamical Systems Harry G. Kwatny Department of Mechanical Engineering & Mechanics Drexel University Outline Course practical information
ME375 Lab Project. Bradley Boane & Jeremy Bourque April 25, 2018
 ME375 Lab Project Bradley Boane & Jeremy Bourque April 25, 2018 Introduction: The goal of this project was to build and program a two-wheel robot that travels forward in a straight line for a distance
ME375 Lab Project Bradley Boane & Jeremy Bourque April 25, 2018 Introduction: The goal of this project was to build and program a two-wheel robot that travels forward in a straight line for a distance
ECE 382 Feedback Systems Analysis and Design
 ECE 382 Feedback Systems Analysis and Design Stan Żak School of Electrical and Computer Engineering Purdue University zak@purdue.edu August 20, 2012 1/49 Today s Class Instructor intro during the first
ECE 382 Feedback Systems Analysis and Design Stan Żak School of Electrical and Computer Engineering Purdue University zak@purdue.edu August 20, 2012 1/49 Today s Class Instructor intro during the first
SMJE 3153 Control System. Department of ESE, MJIIT, UTM 2014/2015
 SMJE 3153 Control System Department of ESE, MJIIT, UTM 2014/2015 1 Course Outline Course Instructors Prof Nozomu Hamada (hamada@utm.my)and Dr. Mohd Azizi Abdul Rahman Course Web site UTM e-learning site
SMJE 3153 Control System Department of ESE, MJIIT, UTM 2014/2015 1 Course Outline Course Instructors Prof Nozomu Hamada (hamada@utm.my)and Dr. Mohd Azizi Abdul Rahman Course Web site UTM e-learning site
Figure 1.1: Quanser Driving Simulator
 1 INTRODUCTION The Quanser HIL Driving Simulator (QDS) is a modular and expandable LabVIEW model of a car driving on a closed track. The model is intended as a platform for the development, implementation
1 INTRODUCTION The Quanser HIL Driving Simulator (QDS) is a modular and expandable LabVIEW model of a car driving on a closed track. The model is intended as a platform for the development, implementation
CHAPTER 1 Introduction of Control System
 CHAPTER 1 Introduction of Control System DR. SHAFISHUHAZA SAHLAN DR. SHAHDAN SUDIN DR. HERMAN WAHID DR. FATIMAH SHAM ISMAIL Department of Control and Mechatronics Engineering Faculty of Electrical Engineering
CHAPTER 1 Introduction of Control System DR. SHAFISHUHAZA SAHLAN DR. SHAHDAN SUDIN DR. HERMAN WAHID DR. FATIMAH SHAM ISMAIL Department of Control and Mechatronics Engineering Faculty of Electrical Engineering
The PID controller. Summary. Introduction to Control Systems
 The PID controller ISTTOK real-time AC 7-10-2010 Summary Introduction to Control Systems PID Controller PID Tuning Discrete-time Implementation The PID controller 2 Introduction to Control Systems Some
The PID controller ISTTOK real-time AC 7-10-2010 Summary Introduction to Control Systems PID Controller PID Tuning Discrete-time Implementation The PID controller 2 Introduction to Control Systems Some
CDS 101: Lecture 1 Introduction to Feedback and Control. Richard M. Murray 30 September 2002
 1 CDS 101: Lecture 1 Introduction to Feedback and Control Richard M. Murray 30 September 2002 Goals: Define what a control system is and learn how to recognize its main features Describe what control systems
1 CDS 101: Lecture 1 Introduction to Feedback and Control Richard M. Murray 30 September 2002 Goals: Define what a control system is and learn how to recognize its main features Describe what control systems
IVR: Introduction to Control
 IVR: Introduction to Control OVERVIEW Control systems Transformations Simple control algorithms History of control Centrifugal governor M. Boulton and J. Watt (1788) J. C. Maxwell (1868) On Governors.
IVR: Introduction to Control OVERVIEW Control systems Transformations Simple control algorithms History of control Centrifugal governor M. Boulton and J. Watt (1788) J. C. Maxwell (1868) On Governors.
PUBLICATIONS. [7] C. A. Desoer, A. N. Gündeş, Algebraic theory of feedback systems with two-input two-output plant
![PUBLICATIONS. [7] C. A. Desoer, A. N. Gündeş, Algebraic theory of feedback systems with two-input two-output plant](/thumbs/94/122218982.jpg "PUBLICATIONS. [7] C. A. Desoer, A. N. Gündeş, Algebraic theory of feedback systems with two-input two-output plant") A. N. Gündeş March 2012 PUBLICATIONS [1] C. A. Desoer, A. N. Gündeş, Circuits, k-ports, hidden modes, stability of interconnected k-ports, IEEE Transactions on Circuits and Systems, vol. CAS-32, no. 7,
A. N. Gündeş March 2012 PUBLICATIONS [1] C. A. Desoer, A. N. Gündeş, Circuits, k-ports, hidden modes, stability of interconnected k-ports, IEEE Transactions on Circuits and Systems, vol. CAS-32, no. 7,
Microelectronic Circuits - Fifth Edition Sedra/Smith Copyright 2004 by Oxford University Press, Inc.
 Feedback 1 Figure 8.1 General structure of the feedback amplifier. This is a signal-flow diagram, and the quantities x represent either voltage or current signals. 2 Figure E8.1 3 Figure 8.2 Illustrating
Feedback 1 Figure 8.1 General structure of the feedback amplifier. This is a signal-flow diagram, and the quantities x represent either voltage or current signals. 2 Figure E8.1 3 Figure 8.2 Illustrating
Modern Control System Theory and Design. Dr. Huang, Min Chemical Engineering Program Tongji University
 Modern Control System Theory and Design Dr. Huang, Min Chemical Engineering Program Tongji University Syllabus Instructor: Dr. Huang, Min Time and Place to meet Office Hours: Text Book and References Modern
Modern Control System Theory and Design Dr. Huang, Min Chemical Engineering Program Tongji University Syllabus Instructor: Dr. Huang, Min Time and Place to meet Office Hours: Text Book and References Modern
Welcome to SENG 480B / CSC 485A / CSC 586A Self-Adaptive and Self-Managing Systems
 Welcome to SENG 480B / CSC 485A / CSC 586A Self-Adaptive and Self-Managing Systems Dr. Hausi A. Müller Department of Computer Science University of Victoria http://courses.seng.uvic.ca/courses/2015/summer/seng/480a
Welcome to SENG 480B / CSC 485A / CSC 586A Self-Adaptive and Self-Managing Systems Dr. Hausi A. Müller Department of Computer Science University of Victoria http://courses.seng.uvic.ca/courses/2015/summer/seng/480a
MECHATRONICS SYSTEM DESIGN
 MECHATRONICS SYSTEM DESIGN (MtE-325) TODAYS LECTURE Control systems Open-Loop Control Systems Closed-Loop Control Systems Transfer Functions Analog and Digital Control Systems Controller Configurations
MECHATRONICS SYSTEM DESIGN (MtE-325) TODAYS LECTURE Control systems Open-Loop Control Systems Closed-Loop Control Systems Transfer Functions Analog and Digital Control Systems Controller Configurations
INTRODUCTION. Accelerator pedal, linkages and carburetter. Enginevehicle. Fig The basic control system.
 1 INTRODUCTION 1 INTRODUCTION 1.1 THE CONTROL SYSTEM The control system is that means by which any quantity of interest in a machine, mechanism or other equipment is maintained or altered in accordance
1 INTRODUCTION 1 INTRODUCTION 1.1 THE CONTROL SYSTEM The control system is that means by which any quantity of interest in a machine, mechanism or other equipment is maintained or altered in accordance
COMPARISON OF TUNING METHODS OF PID CONTROLLER USING VARIOUS TUNING TECHNIQUES WITH GENETIC ALGORITHM
 JOURNAL OF ELECTRICAL ENGINEERING & TECHNOLOGY Journal of Electrical Engineering & Technology (JEET) (JEET) ISSN 2347-422X (Print), ISSN JEET I A E M E ISSN 2347-422X (Print) ISSN 2347-4238 (Online) Volume
JOURNAL OF ELECTRICAL ENGINEERING & TECHNOLOGY Journal of Electrical Engineering & Technology (JEET) (JEET) ISSN 2347-422X (Print), ISSN JEET I A E M E ISSN 2347-422X (Print) ISSN 2347-4238 (Online) Volume
Automatic Control Systems 2017 Spring Semester
 Automatic Control Systems 2017 Spring Semester Assignment Set 1 Dr. Kalyana C. Veluvolu Deadline: 11-APR - 16:00 hours @ IT1-815 1) Find the transfer function / for the following system using block diagram
Automatic Control Systems 2017 Spring Semester Assignment Set 1 Dr. Kalyana C. Veluvolu Deadline: 11-APR - 16:00 hours @ IT1-815 1) Find the transfer function / for the following system using block diagram
Automatic Control Systems
 Automatic Control Systems Lecture-1 Basic Concepts of Classical control Emam Fathy Department of Electrical and Control Engineering email: emfmz@yahoo.com 1 What is Control System? A system Controlling
Automatic Control Systems Lecture-1 Basic Concepts of Classical control Emam Fathy Department of Electrical and Control Engineering email: emfmz@yahoo.com 1 What is Control System? A system Controlling
Analog circuit design ( )
") Silver Oak College of Engineering & Technology Department of Electronics and Communication 4 th Sem Mid semester-1(summer 2019) Syllabus Microprocessor & Interfacing (2141001) 1 Introduction To 8-bit Microprocessor
Silver Oak College of Engineering & Technology Department of Electronics and Communication 4 th Sem Mid semester-1(summer 2019) Syllabus Microprocessor & Interfacing (2141001) 1 Introduction To 8-bit Microprocessor
Particle Swarm Optimization for PID Tuning of a BLDC Motor
 Proceedings of the 009 IEEE International Conference on Systems, Man, and Cybernetics San Antonio, TX, USA - October 009 Particle Swarm Optimization for PID Tuning of a BLDC Motor Alberto A. Portillo UTSA
Proceedings of the 009 IEEE International Conference on Systems, Man, and Cybernetics San Antonio, TX, USA - October 009 Particle Swarm Optimization for PID Tuning of a BLDC Motor Alberto A. Portillo UTSA
CHAPTER 11. Feedback. Microelectronic Circuits, Seventh Edition. Copyright 2015 by Oxford University Press
 CHAPTER 11 Feedback Figure 11.1 General structure of the feedback amplifier. This is a signal-flow diagram, and the quantities x represent either voltage or current signals. Figure 11.2 Determining the
CHAPTER 11 Feedback Figure 11.1 General structure of the feedback amplifier. This is a signal-flow diagram, and the quantities x represent either voltage or current signals. Figure 11.2 Determining the
Introduction to Digital Control
 Introduction to Digital Control Control systems are an integral part of modern society. Control systems exist in many systems of engineering, sciences, and in human body. Control means to regulate, direct,
Introduction to Digital Control Control systems are an integral part of modern society. Control systems exist in many systems of engineering, sciences, and in human body. Control means to regulate, direct,
SOURAV PATRA. Thesis: Linear matrix inequality approach to H-infinity Loop shaping control problems
 SOURAV PATRA RESEARCH INTERESTS Robust Control o H-infinity control o Control of negative-imaginary systems o Generalized distance measure for uncertain systems o Control of dynamical systems with actuator
SOURAV PATRA RESEARCH INTERESTS Robust Control o H-infinity control o Control of negative-imaginary systems o Generalized distance measure for uncertain systems o Control of dynamical systems with actuator
A New Control Theory for Dynamic Data Driven Systems
 A New Control Theory for Dynamic Data Driven Systems Nikolai Matni Computing and Mathematical Sciences Joint work with Yuh-Shyang Wang, James Anderson & John C. Doyle New application areas 1 New application
A New Control Theory for Dynamic Data Driven Systems Nikolai Matni Computing and Mathematical Sciences Joint work with Yuh-Shyang Wang, James Anderson & John C. Doyle New application areas 1 New application
Magnetic Levitation System
 Magnetic Levitation System Electromagnet Infrared LED Phototransistor Levitated Ball Magnetic Levitation System K. Craig 1 Magnetic Levitation System Electromagnet Emitter Infrared LED i Detector Phototransistor
Magnetic Levitation System Electromagnet Infrared LED Phototransistor Levitated Ball Magnetic Levitation System K. Craig 1 Magnetic Levitation System Electromagnet Emitter Infrared LED i Detector Phototransistor
Instrumentation, Controls, and Automation - Program 68
 Instrumentation, Controls, and Automation - Program 68 Program Description Program Overview Utilities need to improve the capability to detect damage to plant equipment while preserving the focus of skilled
Instrumentation, Controls, and Automation - Program 68 Program Description Program Overview Utilities need to improve the capability to detect damage to plant equipment while preserving the focus of skilled
A Differential Look at the Watt s Governor
 Differential Equations Spring 2003 1/25 A Differential Look at the Watt s Governor by Tim Honn & Seth Stone College of the Redwoods Eureka,CA Math dept. email: timhonn@cox.net email: lamentofseth@hotmail.com
Differential Equations Spring 2003 1/25 A Differential Look at the Watt s Governor by Tim Honn & Seth Stone College of the Redwoods Eureka,CA Math dept. email: timhonn@cox.net email: lamentofseth@hotmail.com
Hands-on Lab. PID Closed-Loop Control
 Hands-on Lab PID Closed-Loop Control Adding feedback improves performance. Unity feedback was examined to serve as a motivating example. Lectures derived the power of adding proportional, integral and
Hands-on Lab PID Closed-Loop Control Adding feedback improves performance. Unity feedback was examined to serve as a motivating example. Lectures derived the power of adding proportional, integral and
ECE317 : Feedback and Control
 ECE317 : Feedback and Control Lecture : Frequency domain specifications Frequency response shaping (Loop shaping) Dr. Richard Tymerski Dept. of Electrical and Computer Engineering Portland State University
ECE317 : Feedback and Control Lecture : Frequency domain specifications Frequency response shaping (Loop shaping) Dr. Richard Tymerski Dept. of Electrical and Computer Engineering Portland State University
Types of control systems:
 Types of control systems: Control systems are classified into two general categories based upon the control action which is responsible to activate the system to produce the output viz. 1) Open loop control
Types of control systems: Control systems are classified into two general categories based upon the control action which is responsible to activate the system to produce the output viz. 1) Open loop control
CDS 101/110a: Lecture 8-1 Frequency Domain Design
 CDS 11/11a: Lecture 8-1 Frequency Domain Design Richard M. Murray 17 November 28 Goals: Describe canonical control design problem and standard performance measures Show how to use loop shaping to achieve
CDS 11/11a: Lecture 8-1 Frequency Domain Design Richard M. Murray 17 November 28 Goals: Describe canonical control design problem and standard performance measures Show how to use loop shaping to achieve
Overview of the Field
 Chapter 2 Overview of the Field Control is a field with broad relevance to a number of engineering applications. Its impact on modern society is both profound and often poorly understood. In this chapter,
Chapter 2 Overview of the Field Control is a field with broad relevance to a number of engineering applications. Its impact on modern society is both profound and often poorly understood. In this chapter,
Lecture 1. Introduction - Course mechanics History Control engineering at present. EE392m - Spring 2005 Gorinevsky. Control Engineering 1-1
 Lecture 1 Introduction - Course mechanics History Control engineering at present Control Engineering 1-1 Introduction - Course Mechanics What this course is about? Prerequisites & course place in the curriculum
Lecture 1 Introduction - Course mechanics History Control engineering at present Control Engineering 1-1 Introduction - Course Mechanics What this course is about? Prerequisites & course place in the curriculum
CDS 101/110: Lecture 8.2 PID Control
 CDS 11/11: Lecture 8.2 PID Control November 16, 216 Goals: Nyquist Example Introduce and review PID control. Show how to use loop shaping using PID to achieve a performance specification Discuss the use
CDS 11/11: Lecture 8.2 PID Control November 16, 216 Goals: Nyquist Example Introduce and review PID control. Show how to use loop shaping using PID to achieve a performance specification Discuss the use
Structure and Synthesis of Robot Motion
 Structure and Synthesis of Robot Motion Motion Synthesis in Groups and Formations I Subramanian Ramamoorthy School of Informatics 5 March 2012 Consider Motion Problems with Many Agents How should we model
Structure and Synthesis of Robot Motion Motion Synthesis in Groups and Formations I Subramanian Ramamoorthy School of Informatics 5 March 2012 Consider Motion Problems with Many Agents How should we model
PROGRAMMABLE PHOTONIC ICS:
 PROGRAMMABLE PHOTONIC ICS: MAKING OPTICAL DEVICES MORE VERSATILE Wim Bogaerts PIC International 9-10 April 2018 1 (SILICON) PICS TODAY Rapidly growing integration O(1000) components on a chip photonics
PROGRAMMABLE PHOTONIC ICS: MAKING OPTICAL DEVICES MORE VERSATILE Wim Bogaerts PIC International 9-10 April 2018 1 (SILICON) PICS TODAY Rapidly growing integration O(1000) components on a chip photonics
ME451: Control Systems. Course roadmap
 ME451: Control Systems Lecture 20 Root locus: Lead compensator design Dr. Jongeun Choi Department of Mechanical Engineering Michigan State University Fall 2008 1 Modeling Course roadmap Analysis Design
ME451: Control Systems Lecture 20 Root locus: Lead compensator design Dr. Jongeun Choi Department of Mechanical Engineering Michigan State University Fall 2008 1 Modeling Course roadmap Analysis Design
Beam Diagnostics, Low Level RF and Feedback for Room Temperature FELs. Josef Frisch Pohang, March 14, 2011
 Beam Diagnostics, Low Level RF and Feedback for Room Temperature FELs Josef Frisch Pohang, March 14, 2011 Room Temperature / Superconducting Very different pulse structures RT: single bunch or short bursts
Beam Diagnostics, Low Level RF and Feedback for Room Temperature FELs Josef Frisch Pohang, March 14, 2011 Room Temperature / Superconducting Very different pulse structures RT: single bunch or short bursts
CDS 101/110: Lecture 9.1 Frequency DomainLoop Shaping
 CDS /: Lecture 9. Frequency DomainLoop Shaping November 3, 6 Goals: Review Basic Loop Shaping Concepts Work through example(s) Reading: Åström and Murray, Feedback Systems -e, Section.,.-.4,.6 I.e., we
CDS /: Lecture 9. Frequency DomainLoop Shaping November 3, 6 Goals: Review Basic Loop Shaping Concepts Work through example(s) Reading: Åström and Murray, Feedback Systems -e, Section.,.-.4,.6 I.e., we
Structure Specified Robust H Loop Shaping Control of a MIMO Electro-hydraulic Servo System using Particle Swarm Optimization
 Structure Specified Robust H Loop Shaping Control of a MIMO Electrohydraulic Servo System using Particle Swarm Optimization Piyapong Olranthichachat and Somyot aitwanidvilai Abstract A fixedstructure controller
Structure Specified Robust H Loop Shaping Control of a MIMO Electrohydraulic Servo System using Particle Swarm Optimization Piyapong Olranthichachat and Somyot aitwanidvilai Abstract A fixedstructure controller
Intro to Systems Theory and STAMP John Thomas and Nancy Leveson. All rights reserved.
 Intro to Systems Theory and STAMP 1 Why do we need something different? Fast pace of technological change Reduced ability to learn from experience Changing nature of accidents New types of hazards Increasing
Intro to Systems Theory and STAMP 1 Why do we need something different? Fast pace of technological change Reduced ability to learn from experience Changing nature of accidents New types of hazards Increasing
CDS 110 L10.2: Motion Control Systems. Motion Control Systems
 CDS, Lecture.2 4 Dec 2 R. M. Murray, Caltech CDS CDS L.2: Motion Control Systems Richard M. Murray 4 December 22 Announcements Final exam available at 3 pm (during break); due 5 pm, Friday, 3 Dec 2 Outline:
CDS, Lecture.2 4 Dec 2 R. M. Murray, Caltech CDS CDS L.2: Motion Control Systems Richard M. Murray 4 December 22 Announcements Final exam available at 3 pm (during break); due 5 pm, Friday, 3 Dec 2 Outline:
Introduction to Systems Engineering
 p. 1/2 ENES 489P Hands-On Systems Engineering Projects Introduction to Systems Engineering Mark Austin E-mail: austin@isr.umd.edu Institute for Systems Research, University of Maryland, College Park Career
p. 1/2 ENES 489P Hands-On Systems Engineering Projects Introduction to Systems Engineering Mark Austin E-mail: austin@isr.umd.edu Institute for Systems Research, University of Maryland, College Park Career
«Digital transformation of Pharma and API Plants: a way to create value for long term sustainability» G. Burba
 «Digital transformation of Pharma and API Plants: a way to create value for long term sustainability» G. Burba Chemistry 4.0 Milan, September 27 th, 2018 1 The 4 th industrial revolution More than 100
«Digital transformation of Pharma and API Plants: a way to create value for long term sustainability» G. Burba Chemistry 4.0 Milan, September 27 th, 2018 1 The 4 th industrial revolution More than 100
CHAPTER 9 FEEDBACK. NTUEE Electronics L.H. Lu 9-1
 CHAPTER 9 FEEDBACK Chapter Outline 9.1 The General Feedback Structure 9.2 Some Properties of Negative Feedback 9.3 The Four Basic Feedback Topologies 9.4 The Feedback Voltage Amplifier (Series-Shunt) 9.5
CHAPTER 9 FEEDBACK Chapter Outline 9.1 The General Feedback Structure 9.2 Some Properties of Negative Feedback 9.3 The Four Basic Feedback Topologies 9.4 The Feedback Voltage Amplifier (Series-Shunt) 9.5
TRB Workshop on the Future of Road Vehicle Automation
 TRB Workshop on the Future of Road Vehicle Automation Steven E. Shladover University of California PATH Program ITFVHA Meeting, Vienna October 21, 2012 1 Outline TRB background Workshop organization Automation
TRB Workshop on the Future of Road Vehicle Automation Steven E. Shladover University of California PATH Program ITFVHA Meeting, Vienna October 21, 2012 1 Outline TRB background Workshop organization Automation
Design of Missile Two-Loop Auto-Pilot Pitch Using Root Locus
 International Journal Of Advances in Engineering and Management (IJAEM) Page 141 Volume 1, Issue 5, November - 214. Design of Missile Two-Loop Auto-Pilot Pitch Using Root Locus 1 Rami Ali Abdalla, 2 Muawia
International Journal Of Advances in Engineering and Management (IJAEM) Page 141 Volume 1, Issue 5, November - 214. Design of Missile Two-Loop Auto-Pilot Pitch Using Root Locus 1 Rami Ali Abdalla, 2 Muawia
Uç N. MADHUSUDHANAREDDYM.Sc.,
 DESIGN AND DEVELOPMENT OF ETHERNET BASED DC MOTOR SPEED CONTROL SYSTEM USING ARM Cortex PROCESSOR AND ITS APPLICATION FOR SOLAR POWER TRACKING Thesis submitted to SRI KRISHNADEVARAYA UNIVERSITY in partial
DESIGN AND DEVELOPMENT OF ETHERNET BASED DC MOTOR SPEED CONTROL SYSTEM USING ARM Cortex PROCESSOR AND ITS APPLICATION FOR SOLAR POWER TRACKING Thesis submitted to SRI KRISHNADEVARAYA UNIVERSITY in partial
Estimation of State Variables of Active Suspension System using Kalman Filter
 International Journal of Current Engineering and Technology E-ISSN 2277 416, P-ISSN 2347 5161 217 INPRESSCO, All Rights Reserved Available at http://inpressco.com/category/ijcet Research Article Estimation
International Journal of Current Engineering and Technology E-ISSN 2277 416, P-ISSN 2347 5161 217 INPRESSCO, All Rights Reserved Available at http://inpressco.com/category/ijcet Research Article Estimation
Graduate Programs in Advanced Systems Engineering
 Graduate Programs in Advanced Systems Engineering UTC Institute for Advanced Systems Engineering, University of Connecticut Mission To train the engineer of the next decade: the one who is not constrained
Graduate Programs in Advanced Systems Engineering UTC Institute for Advanced Systems Engineering, University of Connecticut Mission To train the engineer of the next decade: the one who is not constrained
Electrical Engineering. Control Systems. Comprehensive Theory with Solved Examples and Practice Questions. Publications
 Electrical Engineering Control Systems Comprehensive Theory with Solved Examples and Practice Questions Publications Publications MADE EASY Publications Corporate Office: 44-A/4, Kalu Sarai (Near Hauz
Electrical Engineering Control Systems Comprehensive Theory with Solved Examples and Practice Questions Publications Publications MADE EASY Publications Corporate Office: 44-A/4, Kalu Sarai (Near Hauz
Control Engineering. Hidden Technology. K. J. Åström Lund Institute of Technology Lund University. the Hidden Technology
 Control Engineering the K. J. Åström Lund Institute of Technology Lund University The Widely used Very successful Seldom talked about Except when disaster strikes Why? Easier to talk about devices than
Control Engineering the K. J. Åström Lund Institute of Technology Lund University The Widely used Very successful Seldom talked about Except when disaster strikes Why? Easier to talk about devices than
DEPARTMENT OF ELECTRICAL AND ELECTRONIC ENGINEERING BANGLADESH UNIVERSITY OF ENGINEERING & TECHNOLOGY EEE 402 : CONTROL SYSTEMS SESSIONAL
 DEPARTMENT OF ELECTRICAL AND ELECTRONIC ENGINEERING BANGLADESH UNIVERSITY OF ENGINEERING & TECHNOLOGY EEE 402 : CONTROL SYSTEMS SESSIONAL Experiment No. 1(a) : Modeling of physical systems and study of
DEPARTMENT OF ELECTRICAL AND ELECTRONIC ENGINEERING BANGLADESH UNIVERSITY OF ENGINEERING & TECHNOLOGY EEE 402 : CONTROL SYSTEMS SESSIONAL Experiment No. 1(a) : Modeling of physical systems and study of
Electrical Materials may be referred to a metal, dielectrics,electrical insulators or conductors,paramagnetic materials and many other.
 Electrical Engineering Paper-1 Syllabus : This part is for both objective and conventional types papers : 1) EM Theory- The electromagnetic force is said to be one of the fundamental interactions in nature
Electrical Engineering Paper-1 Syllabus : This part is for both objective and conventional types papers : 1) EM Theory- The electromagnetic force is said to be one of the fundamental interactions in nature
Understanding PID Control
 1 of 5 2/20/01 1:15 PM Understanding PID Control Familiar examples show how and why proportional-integral-derivative controllers behave the way they do. Keywords: Process control Control theory Controllers
1 of 5 2/20/01 1:15 PM Understanding PID Control Familiar examples show how and why proportional-integral-derivative controllers behave the way they do. Keywords: Process control Control theory Controllers
Process & Instrumentation Diagram * (P&ID) Tutorial
 Tutorial") The Kendall Group 2018 Technology Summit Process & Instrumentation Diagram * (P&ID) Tutorial * a.k.a Piping & Instrumentation Diagram Tech Session T44 Presenter: Jon Puskarich Tutorial Overview Common
The Kendall Group 2018 Technology Summit Process & Instrumentation Diagram * (P&ID) Tutorial * a.k.a Piping & Instrumentation Diagram Tech Session T44 Presenter: Jon Puskarich Tutorial Overview Common
DC motor control using arduino
 DC motor control using arduino 1) Introduction: First we need to differentiate between DC motor and DC generator and where we can use it in this experiment. What is the main different between the DC-motor,
DC motor control using arduino 1) Introduction: First we need to differentiate between DC motor and DC generator and where we can use it in this experiment. What is the main different between the DC-motor,
1. Consider the closed loop system shown in the figure below. Select the appropriate option to implement the system shown in dotted lines using
 1. Consider the closed loop system shown in the figure below. Select the appropriate option to implement the system shown in dotted lines using op-amps a. b. c. d. Solution: b) Explanation: The dotted
1. Consider the closed loop system shown in the figure below. Select the appropriate option to implement the system shown in dotted lines using op-amps a. b. c. d. Solution: b) Explanation: The dotted
Figure 1: Unity Feedback System. The transfer function of the PID controller looks like the following:
 Islamic University of Gaza Faculty of Engineering Electrical Engineering department Control Systems Design Lab Eng. Mohammed S. Jouda Eng. Ola M. Skeik Experiment 3 PID Controller Overview This experiment
Islamic University of Gaza Faculty of Engineering Electrical Engineering department Control Systems Design Lab Eng. Mohammed S. Jouda Eng. Ola M. Skeik Experiment 3 PID Controller Overview This experiment
Modeling a Hybrid Electric Vehicle and Controller to Optimize System Performance
 Root Locus Bode Plot Ref. Voltage + - + Ref. - Speed Controller Controller Real Axis Frequency Modeling a Hybrid Electric Vehicle and Controller to Optimize System Performance 2005 The MathWorks, Inc.
Root Locus Bode Plot Ref. Voltage + - + Ref. - Speed Controller Controller Real Axis Frequency Modeling a Hybrid Electric Vehicle and Controller to Optimize System Performance 2005 The MathWorks, Inc.
Shaft Torque Excitation Control for Drivetrain Bench
 Power Electronics Technology Shaft Excitation Control for Drivetrain Bench Takao Akiyama, Kazuhiro Ogawa, Yoshimasa Sawada Keywords Drivetrain bench,, Excitation Abstract We developed a technology for
Power Electronics Technology Shaft Excitation Control for Drivetrain Bench Takao Akiyama, Kazuhiro Ogawa, Yoshimasa Sawada Keywords Drivetrain bench,, Excitation Abstract We developed a technology for
Feedback (and control) systems
 systems") Feedback (and control) systems Stability and performance Copyright 2007-2008 Stevens Institute of Technology - All rights reserved 22-1/23 Behavior of Under-damped System Y() s s b y 0 M s 2n y0 2 2 2
Feedback (and control) systems Stability and performance Copyright 2007-2008 Stevens Institute of Technology - All rights reserved 22-1/23 Behavior of Under-damped System Y() s s b y 0 M s 2n y0 2 2 2
High Performance Electromagnetic Actuator and Valves. Rapid and design & analysis using automated analysis tools
 High Performance Electromagnetic Actuator and Valves Rapid and design & analysis using automated analysis tools Electromechanical actuator and valve design Czero has a passion for designing and developing
High Performance Electromagnetic Actuator and Valves Rapid and design & analysis using automated analysis tools Electromechanical actuator and valve design Czero has a passion for designing and developing
Control System Definition
 Control System Definition Introduction A control system consists of subsystems and processes (or plants) assembled for the purpose of obtaining a desired output with desired performance, given a specified
Control System Definition Introduction A control system consists of subsystems and processes (or plants) assembled for the purpose of obtaining a desired output with desired performance, given a specified
Computational Intelligence Introduction
 Computational Intelligence Introduction Farzaneh Abdollahi Department of Electrical Engineering Amirkabir University of Technology Fall 2011 Farzaneh Abdollahi Neural Networks 1/21 Fuzzy Systems What are
Computational Intelligence Introduction Farzaneh Abdollahi Department of Electrical Engineering Amirkabir University of Technology Fall 2011 Farzaneh Abdollahi Neural Networks 1/21 Fuzzy Systems What are
SHAPING THE FUTURE OF IOT: PLATFORMS FOR CO-CREATION, RAPID PROTOTYPING AND SUCCESSFUL INDUSTRIALIZATION
 SHAPING THE FUTURE OF IOT: PLATFORMS FOR CO-CREATION, RAPID PROTOTYPING AND SUCCESSFUL INDUSTRIALIZATION Dr. Julian Bartholomeyczik Head of Software Development Bosch Connected Devices and Solutions GmbH
SHAPING THE FUTURE OF IOT: PLATFORMS FOR CO-CREATION, RAPID PROTOTYPING AND SUCCESSFUL INDUSTRIALIZATION Dr. Julian Bartholomeyczik Head of Software Development Bosch Connected Devices and Solutions GmbH
ANNA UNIVERSITY :: CHENNAI MODEL QUESTION PAPER(V-SEMESTER) B.E. ELECTRONICS AND COMMUNICATION ENGINEERING EC334 - CONTROL SYSTEMS
 B.E. ELECTRONICS AND COMMUNICATION ENGINEERING EC334 - CONTROL SYSTEMS") ANNA UNIVERSITY :: CHENNAI - 600 025 MODEL QUESTION PAPER(V-SEMESTER) B.E. ELECTRONICS AND COMMUNICATION ENGINEERING EC334 - CONTROL SYSTEMS Time: 3hrs Max Marks: 100 Answer all Questions PART - A (10
ANNA UNIVERSITY :: CHENNAI - 600 025 MODEL QUESTION PAPER(V-SEMESTER) B.E. ELECTRONICS AND COMMUNICATION ENGINEERING EC334 - CONTROL SYSTEMS Time: 3hrs Max Marks: 100 Answer all Questions PART - A (10
1 Chapter 8: Root Locus Techniques. Chapter 8. Root Locus Techniques. 2000, John Wiley & Sons, Inc. Nise/Control Systems Engineering, 3/e
 1 Chapter 8 Root Locus Techniques 2 Figure 8.1 a. Closedloop system; b. equivalent transfer function 3 Figure 8.2 Vector representation of complex numbers: a. s = σ + jω; b. (s + a); c. alternate representation
1 Chapter 8 Root Locus Techniques 2 Figure 8.1 a. Closedloop system; b. equivalent transfer function 3 Figure 8.2 Vector representation of complex numbers: a. s = σ + jω; b. (s + a); c. alternate representation
Model-Based Design for Medical Applications. Rob Reilink, M.Sc Ph.D
 Model-Based Design for Medical Applications using HDL Coder Rob Reilink, M.Sc Ph.D DEMCON Profile 6 locations HIGHTECH SYSTEMS MEDICAL SYSTEMS EMBEDDED SYSTEMS INDUSTRIAL SYSTEMS & VISION OPTOMECHATRONIC
Model-Based Design for Medical Applications using HDL Coder Rob Reilink, M.Sc Ph.D DEMCON Profile 6 locations HIGHTECH SYSTEMS MEDICAL SYSTEMS EMBEDDED SYSTEMS INDUSTRIAL SYSTEMS & VISION OPTOMECHATRONIC
BSNL TTA Question Paper Control Systems Specialization 2007
 BSNL TTA Question Paper Control Systems Specialization 2007 1. An open loop control system has its (a) control action independent of the output or desired quantity (b) controlling action, depending upon
BSNL TTA Question Paper Control Systems Specialization 2007 1. An open loop control system has its (a) control action independent of the output or desired quantity (b) controlling action, depending upon
Principles of Engineering
 Principles of Engineering 2004 (Fifth Edition) Clifton Park, New York All rights reserved 1 The National Academy of Sciences Standards: 1.0 Science Inquiry 1.1 Ability necessary to do scientific inquiry
Principles of Engineering 2004 (Fifth Edition) Clifton Park, New York All rights reserved 1 The National Academy of Sciences Standards: 1.0 Science Inquiry 1.1 Ability necessary to do scientific inquiry
ANALYSIS AND DESIGN OF ANALOG INTEGRATED CIRCUITS
 ANALYSIS AND DESIGN OF ANALOG INTEGRATED CIRCUITS Fourth Edition PAUL R. GRAY University of California, Berkeley PAUL J. HURST University of California, Davis STEPHEN H. LEWIS University of California,
ANALYSIS AND DESIGN OF ANALOG INTEGRATED CIRCUITS Fourth Edition PAUL R. GRAY University of California, Berkeley PAUL J. HURST University of California, Davis STEPHEN H. LEWIS University of California,
Synchronization between a SystemC based offline Restbus Simulator and a HIL FlexRay network
 Synchronization between a SystemC based offline Restbus Simulator and a HIL FlexRay network Gilles Bertrand Defo, Wolfgang Mueller University of Paderborn / C-LAB Fürstenallee 11 33102 Paderborn Germany
Synchronization between a SystemC based offline Restbus Simulator and a HIL FlexRay network Gilles Bertrand Defo, Wolfgang Mueller University of Paderborn / C-LAB Fürstenallee 11 33102 Paderborn Germany
Figure 70 - False-colored image of Shoffner's team basic design for a Peltier (thermalelectric cooler - TEC) driven PCR-chip thermocycler.
 driven PCR-chip thermocycler.") External fast thermocycler - 151 Basic setup A final decision on temperature control concerned the basic setup of the system; that is, which components (sensors, circuitry, etc.) to use and in what hierarchical
External fast thermocycler - 151 Basic setup A final decision on temperature control concerned the basic setup of the system; that is, which components (sensors, circuitry, etc.) to use and in what hierarchical
Introduction. Chapter What is Feedback?
 Chapter 1 Introduction Feedback is a central feature of life. The process of feedback governs how we grow, respond to stress and challenge, and regulate factors such as body temperature, blood pressure,
Chapter 1 Introduction Feedback is a central feature of life. The process of feedback governs how we grow, respond to stress and challenge, and regulate factors such as body temperature, blood pressure,
Addendum Handout for the ECE3510 Project. The magnetic levitation system that is provided for this lab is a non-linear system.
 Addendum Handout for the ECE3510 Project The magnetic levitation system that is provided for this lab is a non-linear system. Because of this fact, it should be noted that the associated ideal linear responses
Addendum Handout for the ECE3510 Project The magnetic levitation system that is provided for this lab is a non-linear system. Because of this fact, it should be noted that the associated ideal linear responses
Dr Ian R. Manchester
 Week Content Notes 1 Introduction 2 Frequency Domain Modelling 3 Transient Performance and the s-plane 4 Block Diagrams 5 Feedback System Characteristics Assign 1 Due 6 Root Locus 7 Root Locus 2 Assign
Week Content Notes 1 Introduction 2 Frequency Domain Modelling 3 Transient Performance and the s-plane 4 Block Diagrams 5 Feedback System Characteristics Assign 1 Due 6 Root Locus 7 Root Locus 2 Assign
UNIT III Data Acquisition & Microcontroller System. Mr. Manoj Rajale
 UNIT III Data Acquisition & Microcontroller System Mr. Manoj Rajale Syllabus Interfacing of Sensors / Actuators to DAQ system, Bit width, Sampling theorem, Sampling Frequency, Aliasing, Sample and hold
UNIT III Data Acquisition & Microcontroller System Mr. Manoj Rajale Syllabus Interfacing of Sensors / Actuators to DAQ system, Bit width, Sampling theorem, Sampling Frequency, Aliasing, Sample and hold
Operationalizing Phasor Technology. Model Validation. Webinar. Ken Martin. March 4, Presented by. Page 0
 Operationalizing Phasor Technology Model Validation Webinar March 4, 2014 Presented by Ken Martin Page 0 Model Use and Validation for Operations and Planning Compare System Performance with Model Prediction
Operationalizing Phasor Technology Model Validation Webinar March 4, 2014 Presented by Ken Martin Page 0 Model Use and Validation for Operations and Planning Compare System Performance with Model Prediction
General Purpose Operational Amplifiers
 General Purpose Operational Amplifiers OUTLINE Lecture 0, 0/7/05 Corrected 0/9/05 Op-Amp from -Port Blocks Op-Amp Model and its Idealization Negative Feedback for Stability Components around Op-Amp define
General Purpose Operational Amplifiers OUTLINE Lecture 0, 0/7/05 Corrected 0/9/05 Op-Amp from -Port Blocks Op-Amp Model and its Idealization Negative Feedback for Stability Components around Op-Amp define
AUTOMATIC VOLTAGE REGULATOR AND AUTOMATIC LOAD FREQUENCY CONTROL IN TWO-AREA POWER SYSTEM
 AUTOMATIC VOLTAGE REGULATOR AND AUTOMATIC LOAD FREQUENCY CONTROL IN TWO-AREA POWER SYSTEM ABSTRACT [1] Nitesh Thapa, [2] Nilu Murmu, [3] Aditya Narayan, [4] Birju Besra Dept. of Electrical and Electronics
AUTOMATIC VOLTAGE REGULATOR AND AUTOMATIC LOAD FREQUENCY CONTROL IN TWO-AREA POWER SYSTEM ABSTRACT [1] Nitesh Thapa, [2] Nilu Murmu, [3] Aditya Narayan, [4] Birju Besra Dept. of Electrical and Electronics
Control Systems Overview REV II
 Control Systems Overview REV II D R. T A R E K A. T U T U N J I M E C H A C T R O N I C S Y S T E M D E S I G N P H I L A D E L P H I A U N I V E R S I T Y 2 0 1 4 Control Systems The control system is
Control Systems Overview REV II D R. T A R E K A. T U T U N J I M E C H A C T R O N I C S Y S T E M D E S I G N P H I L A D E L P H I A U N I V E R S I T Y 2 0 1 4 Control Systems The control system is
Performance Characterization of IP Network-based Control Methodologies for DC Motor Applications Part II
 Performance Characterization of IP Network-based Control Methodologies for DC Motor Applications Part II Tyler Richards, Mo-Yuen Chow Advanced Diagnosis Automation and Control Lab Department of Electrical
Performance Characterization of IP Network-based Control Methodologies for DC Motor Applications Part II Tyler Richards, Mo-Yuen Chow Advanced Diagnosis Automation and Control Lab Department of Electrical
Medb ot. Medbot. Learn about robot behaviors as you transport medicine in a hospital with Medbot!
 Medb ot Medbot Learn about robot behaviors as you transport medicine in a hospital with Medbot! Seek Discover new hands-on builds and programming opportunities to further your understanding of a subject
Medb ot Medbot Learn about robot behaviors as you transport medicine in a hospital with Medbot! Seek Discover new hands-on builds and programming opportunities to further your understanding of a subject
Embracing Complexity. Gavin Walker Development Manager
 Embracing Complexity Gavin Walker Development Manager 1 MATLAB and Simulink Proven Ability to Make the Complex Simpler 1970 Stanford Ph.D. thesis, with thousands of lines of Fortran code 2 MATLAB and Simulink
Embracing Complexity Gavin Walker Development Manager 1 MATLAB and Simulink Proven Ability to Make the Complex Simpler 1970 Stanford Ph.D. thesis, with thousands of lines of Fortran code 2 MATLAB and Simulink
Instructor: Prof. Masayuki Fujita (S5-303B)
") Robust Control Instructor: Prof. Masayuki Fujita (S5-303B) 1/4/2016 T: Magnetic Bearing: Robust Performance Reference: M. Fujita, K. Hatake, F. Matsumura and K. Uchida An Experimental Evaluation and Comparison
Robust Control Instructor: Prof. Masayuki Fujita (S5-303B) 1/4/2016 T: Magnetic Bearing: Robust Performance Reference: M. Fujita, K. Hatake, F. Matsumura and K. Uchida An Experimental Evaluation and Comparison
SILVER OAK COLLEGE OF ENGG. & TECHNOLOGY Midsem I Syllabus Electronics & communication Engineering
 SILVER OAK COLLEGE OF ENGG. & TECHNOLOGY Midsem I Syllabus Electronics & communication Engineering Subject Name: Control System Engineering Subject Code: 2141004 Unit 1: Introduction to Control Systems:
SILVER OAK COLLEGE OF ENGG. & TECHNOLOGY Midsem I Syllabus Electronics & communication Engineering Subject Name: Control System Engineering Subject Code: 2141004 Unit 1: Introduction to Control Systems:
Rapid and precise control of a micro-manipulation stage combining H with ILC algorithm
 Rapid and precise control of a micro-manipulation stage combining H with ILC algorithm *Jie Ling 1 and Xiaohui Xiao 1, School of Power and Mechanical Engineering, WHU, Wuhan, China xhxiao@whu.edu.cn ABSTRACT
Rapid and precise control of a micro-manipulation stage combining H with ILC algorithm *Jie Ling 1 and Xiaohui Xiao 1, School of Power and Mechanical Engineering, WHU, Wuhan, China xhxiao@whu.edu.cn ABSTRACT
Integrated Circuit Design for High-Speed Frequency Synthesis
 Integrated Circuit Design for High-Speed Frequency Synthesis John Rogers Calvin Plett Foster Dai ARTECH H O US E BOSTON LONDON artechhouse.com Preface XI CHAPTER 1 Introduction 1 1.1 Introduction to Frequency
Integrated Circuit Design for High-Speed Frequency Synthesis John Rogers Calvin Plett Foster Dai ARTECH H O US E BOSTON LONDON artechhouse.com Preface XI CHAPTER 1 Introduction 1 1.1 Introduction to Frequency
SECTION 6: ROOT LOCUS DESIGN
 SECTION 6: ROOT LOCUS DESIGN MAE 4421 Control of Aerospace & Mechanical Systems 2 Introduction Introduction 3 Consider the following unity feedback system 3 433 Assume A proportional controller Design
SECTION 6: ROOT LOCUS DESIGN MAE 4421 Control of Aerospace & Mechanical Systems 2 Introduction Introduction 3 Consider the following unity feedback system 3 433 Assume A proportional controller Design
Control Design for Servomechanisms July 2005, Glasgow Detailed Training Course Agenda
 Control Design for Servomechanisms 12 14 July 2005, Glasgow Detailed Training Course Agenda DAY 1 INTRODUCTION TO SYSTEMS AND MODELLING 9.00 Introduction The Need For Control - What Is Control? - Feedback
Control Design for Servomechanisms 12 14 July 2005, Glasgow Detailed Training Course Agenda DAY 1 INTRODUCTION TO SYSTEMS AND MODELLING 9.00 Introduction The Need For Control - What Is Control? - Feedback
ANALYSIS AND DESIGN OF ANALOG INTEGRATED CIRCUITS
 ANALYSIS AND DESIGN OF ANALOG INTEGRATED CIRCUITS Fourth Edition PAUL R. GRAY University of California, Berkeley PAUL J. HURST University of California, Davis STEPHEN H. LEWIS University of California,
ANALYSIS AND DESIGN OF ANALOG INTEGRATED CIRCUITS Fourth Edition PAUL R. GRAY University of California, Berkeley PAUL J. HURST University of California, Davis STEPHEN H. LEWIS University of California,
Magnetic Suspension System Control Using Position and Current Feedback. Senior Project Proposal. Team: Gary Boline and Andrew Michalets
 Magnetic Suspension System Control Using Position and Current Feedback Senior Project Proposal Team: Gary Boline and Andrew Michalets Advisors: Dr. Anakwa and Dr. Schertz Date: November 28, 2006 Summary
Magnetic Suspension System Control Using Position and Current Feedback Senior Project Proposal Team: Gary Boline and Andrew Michalets Advisors: Dr. Anakwa and Dr. Schertz Date: November 28, 2006 Summary
MEM380 Applied Autonomous Robots I Winter Feedback Control USARSim
 MEM380 Applied Autonomous Robots I Winter 2011 Feedback Control USARSim Transforming Accelerations into Position Estimates In a perfect world It s not a perfect world. We have noise and bias in our acceleration
MEM380 Applied Autonomous Robots I Winter 2011 Feedback Control USARSim Transforming Accelerations into Position Estimates In a perfect world It s not a perfect world. We have noise and bias in our acceleration