Handling station. Ruggeveldlaan Deurne tel
|
|
|
- Silas Nash
- 5 years ago
- Views:
Transcription

1 Handling station
2 Introduction and didactic background In the age of knowledge, automation technology is gaining increasing importance as a key division of engineering sciences. As a technical/scientific achievement, it is an expression of creative thoughts and actions of engineers and natural scientists. Automation technology brings about lasting changes to the working and living conditions of people by ensuring high productivity and consistent product quality while at the same time satisfying people's ever- growing need for technological know- how. This applies as much to people s professional as to their private lives. As a technical area of science, automation technology combines knowledge from virtually all other technical sciences. Such an intensely interdisciplinary field of study could scarcely have developed to the extent it has without scientific fundamentals from electrical engineering, mechanical engineering, process engineering and information technology to name just a few. People of all age groups come face- to- face with automated technical systems every day. They use escalators, wait for automatic doors to open, see their groceries move along conveyors at the supermarket and operate automated teller machines. Automation technology, in this sense, is everywhere. Everyone, in every aspect of their lives, is regularly confronted, either directly or indirectly, with the purposeful selection and use as well as the evaluation and assessment of automated systems. The objectives of future- oriented, general technical education must therefore be more strongly geared towards this technology than in the past. Specific objectives are: - Promoting implicit and explicit knowledge of automated systems, - - developing skills and promoting abilities in the use of automated systems, Consolidating abilities with regard to appropriate selection, operational commissioning and careful maintenance of automated technical systems. It is precisely the complexity of automation technology that makes determining the educational content for general pre- vocational technology education difficult yet important. Innovations, essential to every economy, first and foremost require the creativity of technically educated people who have a flexible and above all positive approach to constantly evolving technology. This gives rise to special requirements for general education in technology. It must consist of and provide the content that helps students to understand and deal with technology. People are expected to adapt quickly to the constantly changing conditions of the professional and working world and to acquire the appropriate competencies. For most people, this is only addressed during vocational training. Basic attitudes, however, are created and acquired much earlier. Consequently, general technical studies as well as technological education as part of work studies or interdisciplinary projects is particularly important. Modern didactics always start from the students' current stage of development and ensure they progress from there. Automation technology is one of the most challenging academically since it forms a very complex subject matter within the technology curriculum of a general school system. It can't be taught and learned solely through lectures by a teacher and multimedia lesson units. Involving experts in class work or going on factory tours as a "bridge to practice" is also insufficient. Instead, students must be offered the opportunity to get hands- on practice with automated technical systems, to observe and understand how subsystems and components interact and to be able to assemble and disassemble them. It's all about learning through experience with all the senses. Complex models can be used in the lesson to
3 this end as enactive, i.e. realistic, media. They convey information, represent reality, are communication tools and enable active autonomous and co- operative learning. Models bring every day practice into the classroom. The MecLab is a learning system developed by Festo Didactic, with its stacking magazine, conveyor and handling subsystems, simulates automation practice; its aim is to familiarise students with automated technical systems. Its focus on learning objectives means it can be called a learning media system. Its three subsystems (stacking magazine, conveyor, handling) are separate but can also be used in combination and can thus be seen as an example of learning media complexes. They combine reproductive learning about a disassembly object with productive learning about a production object. The modules can be used to design models, where the focus is on synthesis. Models that can be dismantled and adapted to different requirements by the students through conversion and modification, as is the case in the MecLab system, can be used for both analysing the component parts of a technical system and re- integrating those parts and trace them back to a coherent unit. Linking of theory and practice is an essential aspect of MecLab and its components. Students learn about the practical applications of theories and learn their value as individual statements and statement systems, hypotheses, theses, premises, principles, rules and laws, and therefore will be able to appreciate why they are important. For every theory related to engineering sciences, there is a corresponding application. Generally speaking, practice is the application of technology. Links between theory and practice can, on the one hand, lead students to practise what they have learned by studying the theory and, on the other, to analyse practical applications to prove the theoretical fundamentals on which they are based. These links can be methodically constructed in a number of ways. What's important is that students don't learn about practice just through descriptions or pictures, but internalise and experience it as genuine practice or its equivalent and in so doing exercise their problem- solving skills.
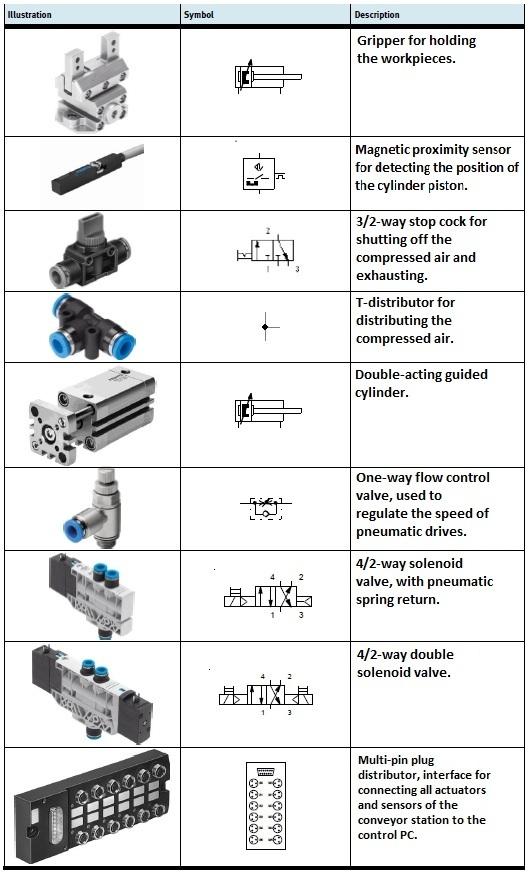
4 Technical significance Handling station Movement, orientation and assembly of workpieces are a requisite for all automated assembly systems. These tasks are performed by automated handling machines, the best known and most powerful of which are the industrial robots. Industrial robots are freely programmable and have at least four axes (i.e. driven joints), making them extremely flexible. Industrial robots are also very fast (over 1 m/s) and accurate (repetition accuracy of better than 50 µm). Simpler handling devices are adequate for many assembly tasks. One of the most important components in a handling device are the grippers used to establish contact with the workpiece. There are many different designs of grippers: - Mechanical grippers with two or three gripper jaws grip workpieces like a hand. Since these grippers' fingers are not as flexible as the fingers on an actual hand, however, it means that the gripper jaws generally have to be adapted to the workpiece to be gripped Vacuum grippers hold the workpieces by means of vacuum. They are especially suitable for flat workpieces but less suitable for porous ones because no vacuum can be built up. Magnetic grippers for magnetisable workpieces. Adhesive grippers where the workpieces are held using an adhesive film. These are used less frequently because they are very sensitive to soiling. Since two- axis automated handling machines are most frequently used to remove (pick) workpieces from a magazine and then deposit or assemble (place) them somewhere else, they are also called pick and place devices. The handeling station consists of - Two pneumatic linear axes - One pneumatic gripper - Three valves for controlling the pneumatic actuators - Four magnetic procimity sensors for detecting the position axes and further components Complete structure of the handling station
5 The following table provides an overview of the components, their significance and the corresponding circuit symbol.
6
7 Preparation The assignment starts by trying to find out which in- and outputs are connected to the Multi- plug in connection. Once these links are found, we are able to generate connections based upon the technical data of the Multi- plug in connection (see attachment) and a custom made addressing table. After connections have been made we will check all cylinders, sensors and relays via the PLC or FluidSim by steering them. Learning objective Upon completing this exercise, you should - be able to select the components of an electropneumatic circuit - be able to design electropneumatic circuits - be able to actuate a double- acting cylinder using FluidSIM - be familiar with the most important logic operations - be able to create logic programs in FluidSIM - be able to solve simple control tasks using logic operations - be familiar with the mode of operation and fields of application of sequencing - be able to create simple control systems via sequencing programs - be familiar with the mode of operation and fields of application of sequencing - be able to create complex control systems via sequencing programs Aids FluidSIM, Handling station, Tasks Problem description 1 Workpieces are to be lifted using a pneumatic cylinder. A control system is to be designed for this purpose. A vertically arranged double- acting cylinder equipped with one- way flow control valves is provided for lifting. This cylinder is to be supplied with air by means of a solenoid valve and controlled via PC. The cylinder should advance when a pushbutton is actuated and retract after a second pushbutton is actuated. Task 1 Design a pneumatic circuit diagram for the components you selected and test its function via simulation. Complete the electrical circuit diagram with the suitable actuating elements and transfer the solution to FluidSIM. Test its function via simulation.
8 Extend the circuit so that the vertically arranged cylinder of the handling station can be controlled and test its operability.
9 Problem description 2 Logic operations are an important basis of control technology. In the FluidSIM logic module, inputs and outputs are linked using logic operations. This exercise deals with the most important logic operations. Task 2 Transfer the following logic circuits to FluidSIM and study the circuit's behaviour by setting the input channels I1 through I3 to the status 'high' by clicking on them. Complete the truth table. In each case specify an example of a control task that can be solved using this logic operation. Create the logic circuit shown below in FluidSIM, test its behaviour and describe it. What control tasks can this so- called latching element be used for? Create the circuit shown below in FluidSIM. Open the logic module and create a program with the following characteristics: Lamp P1 should light up when the two pushbuttons T1 and T2 are pressed (and stay on after pushbuttons T1 and T2 have been released). The lamp should switch off extinguished when pushbuttons T3 or T4 are actuated. I1 I2 I3 Q Example of a control task:

10 I1 I2 I3 Q Example of a control task: I1 Q1 0 1 Example of a control task:


11 I1 I2 Q Example of a control task: Create the logic circuit shown below in FluidSIM, test its behaviour and describe it. What control tasks can this so- called latching element be used for?
12 Create the circuit shown below in FluidSIM. Open the logic module and create a program with the following characteristics: Lamp P1 should light up when the two pushbuttons T1 and T2 are pressed (and stay on after pushbuttons T1 and T2 have been released). The lamp should switch off when pushbuttons T3 or T4 are actuated.
13 Extend the circuit so that a double- acting cylinder retracts and advances instead of the lamp lighting up. Problem description 3 Many sequences in automation technology are characterised by one process step having to take place after another. Sensors check whether one step has been successfully completed before the next step starts. This is referred to as sequencing. There is a special programming technique available for user- friendly sequencing. A simple sequence is to be programmed that lifts a workpiece in the handling station from the holder using the vertically arranged cylinder. The workpiece should then be released again when a pushbutton is actuated. Task 3 Create a schematic diagram of the setup as well as an allocation list that shows which electrical components are plugged into which slots on the multi- pin plug distributor. Also create the pneumatic and electrical circuit diagrams in FluidSIM (using the logic module, still without a program). Describe in detail the sequence outlined in the problem description. Use the prepared form on the worksheet. Open the logic module in FluidSIM by clicking on it with the mouse and create the program to accomplish the sequence described in previous Exercise 3. Test the program via simulation. Test the program using the handling station. Ensure that the wiring and the tubing correspond to the circuit diagram and assignment list.
14 Create a schematic diagram of the setup as well as an allocation list that shows which electrical components are plugged into which slots on the multi- pin plug distributor. Also create the pneumatic and electrical circuit diagrams in FluidSIM (using the logic module, still without a program). Schematic diagram Slot Designation Explanation
15 Describe in detail the sequence outlined in the problem description. Use the prepared form on the worksheet. Step Action Output Condition Open the logic module in FluidSIM by clicking on it with the mouse and create the program to accomplish the sequence described in Exercise 3. Test the program via simulation.
16 Test the program using the handling station. Ensure that the wiring and the tubing correspond to the circuit diagram and allocation list.
17 Problem description 4 Handling tasks are frequently encountered in production. Not all of these tasks require industrial robots; so- called 2- axis handling systems are used for simple motion sequences. Handling scenarios where a workpiece is moved from one location to another are frequently called pick and place tasks. Examples of these include - retrieving a workpiece from a conveyor - placing one workpiece in another (assembly) - placing a workpiece in packaging - this exercise deals with a pick and place task using the handling station. Task 4 Create a schematic diagram, an allocation list and an electropneumatic circuit diagram for the handling station. The logic module is to serve as the controller. The handling system is to move a workpiece from the rear tray to the front tray. Describe this sequence in detail. Use the prepared worksheet. Specify which input and output signals have to be received and transmitted. The program should start when a pushbutton is pressed. Open the logic module in FluidSIM by clicking on it with the mouse and create the program to accomplish the sequence. Test the program via simulation. Test the program using the handling station. Ensure that the wiring and the tubing correspond to the circuit diagram and allocation list. Adjust the holders so the gripper can securely grip the workpiece.
18 Create a schematic diagram, an allocation list and an electropneumatic circuit diagram for the handling station. The logic module is to serve as the controller. Schematic diagram
19 Slot Designation Explanation Allocation list Electro- pneumatic circuit diagram
20 The handling system is to move a workpiece from the rear tray to the front tray. Describe this sequence in detail. Use the prepared worksheet. Specify which input and output signals have to be received and transmitted. The program should start when a pushbutton is pressed. Step Action Output Condition
21 Open the logic module in FluidSIM by clicking on it with the mouse and create the program to accomplish the sequence. Test the program via simulation. Test the program using the handling station. Ensure that the wiring and the tubing correspond to the circuit diagram and allocation list.
Conveyor station. Ruggeveldlaan Deurne tel
 Conveyor station Introduction and didactic background In the age of knowledge, automation technology is gaining increasing importance as a key division of engineering sciences. As a technical/scientific
Conveyor station Introduction and didactic background In the age of knowledge, automation technology is gaining increasing importance as a key division of engineering sciences. As a technical/scientific
Fieldbus technology AS-Interface. Workbook TP EN ET 200S ET 200S IM 151 CPU FRCE BF RU N ON RU N M RES IM 151 CPU FRCE PROFIBUS-DP
 CPU313C-2 DP SF BF 0 0 DC5V FRCE 2 2 RU N 3 3 STOP 4 4 PU SH 5 5 MPI RU N STOP MRES DP 1 6 7 IN 0 1 2 3 4 5 6 7 1 6 7 OUT 0 1 2 3 4 5 6 7 CP 343-2 SF PW R APF CER AUP CM B 20+ 10+ SET 9 8 7 6 5 4 3 2 1
CPU313C-2 DP SF BF 0 0 DC5V FRCE 2 2 RU N 3 3 STOP 4 4 PU SH 5 5 MPI RU N STOP MRES DP 1 6 7 IN 0 1 2 3 4 5 6 7 1 6 7 OUT 0 1 2 3 4 5 6 7 CP 343-2 SF PW R APF CER AUP CM B 20+ 10+ SET 9 8 7 6 5 4 3 2 1
Teciam. Part K. Robotics
 Part K > Basic Technologies > Contents Table of Contents Introduction Introduction... K-3 Training Approach Training Approach... K-3 Modular Production System Modular Production System MPS... K-4 Technology
Part K > Basic Technologies > Contents Table of Contents Introduction Introduction... K-3 Training Approach Training Approach... K-3 Modular Production System Modular Production System MPS... K-4 Technology
Unit 24: Applications of Pneumatics and Hydraulics Unit code: J/601/1496 QCF level: 4 Credit value: 15
 Unit 24: Applications of Pneumatics and Hydraulics Unit code: J/601/1496 QCF level: 4 Credit value: 15 ASSIGNMENT 3 CIRCUIT DESIGN TARGET SUBMISSION DATE: NAME: I agree to the assessment as contained in
Unit 24: Applications of Pneumatics and Hydraulics Unit code: J/601/1496 QCF level: 4 Credit value: 15 ASSIGNMENT 3 CIRCUIT DESIGN TARGET SUBMISSION DATE: NAME: I agree to the assessment as contained in
Training Calendar 2018
 Training Calendar 2018 Training and seminars from industry - for industry www.festo-didactic.com/in-en Didactic Training for the industry Photo: WorldSkills, Abu Dhabi The relentless competitive pressure
Training Calendar 2018 Training and seminars from industry - for industry www.festo-didactic.com/in-en Didactic Training for the industry Photo: WorldSkills, Abu Dhabi The relentless competitive pressure
Vietnamese-German Development Cooperation. Module
 Promotion Mechatronics of TVET Viet Nam Vietnamese-German Development Cooperation Module Production Programming of of mechanical mechatronic subassemblies systems by with manual microcontroller production
Promotion Mechatronics of TVET Viet Nam Vietnamese-German Development Cooperation Module Production Programming of of mechanical mechatronic subassemblies systems by with manual microcontroller production
Table of Contents. Lucas Nülle GmbH Page 1/75
 Table of Contents Table of Contents Automation Technology CIM Computer Integrated Manufacturing CIM 1-2 Individual components used in machining CIM 1 Lathe machine CIM 2 Milling machine CIM 11-23 Examples
Table of Contents Table of Contents Automation Technology CIM Computer Integrated Manufacturing CIM 1-2 Individual components used in machining CIM 1 Lathe machine CIM 2 Milling machine CIM 11-23 Examples
Teciam. Part C. Virtual Mechatronics
 Teciam Part C Teciam > Fundamentals > Contents Table of Contents Introduction Introduction... C-3 Conceptualisation Conceptualisation... C-3 Diversified Contents Diversified Contents... C-4 Technology
Teciam Part C Teciam > Fundamentals > Contents Table of Contents Introduction Introduction... C-3 Conceptualisation Conceptualisation... C-3 Diversified Contents Diversified Contents... C-4 Technology
The modular production system (MPS): an alternate approach for control technology in design and technology
: an alternate approach for control technology in design and technology") Loughborough University Institutional Repository The modular production system (MPS): an alternate approach for control technology in design and technology This item was submitted to Loughborough University's
Loughborough University Institutional Repository The modular production system (MPS): an alternate approach for control technology in design and technology This item was submitted to Loughborough University's
Servo Robot Training Systems
 Servo Robot Training Systems LabVolt Series Datasheet Festo Didactic en 220 V - 50 Hz 07/2018 Table of Contents General Description 2 Robot Controller Module 3 Servo Robot Software 3 Location Pins 4 Included
Servo Robot Training Systems LabVolt Series Datasheet Festo Didactic en 220 V - 50 Hz 07/2018 Table of Contents General Description 2 Robot Controller Module 3 Servo Robot Software 3 Location Pins 4 Included
CSNC CARBIDE CIRCULAR SERIES
 CSNC CARBIDE CIRCULAR SERIES HIGHLY EFFICIENT AND PRODUCTIVE HIGH SPEED CIRCULAR SAWING MACHINES CARBIDE SAWS DO THE WORK OF FIVE CONVENTIONAL FACTORY BAND SAWS, WITHOUT SACRIFICING QUALITY. GET THE CLOSE-CUT
CSNC CARBIDE CIRCULAR SERIES HIGHLY EFFICIENT AND PRODUCTIVE HIGH SPEED CIRCULAR SAWING MACHINES CARBIDE SAWS DO THE WORK OF FIVE CONVENTIONAL FACTORY BAND SAWS, WITHOUT SACRIFICING QUALITY. GET THE CLOSE-CUT
FluidSIM 4 The training-all-rounder
 FluidSIM 4 The training-all-rounder Two outstanding companions for successful training: FluidSIM 4.0 and the poster set for pneumatics and hydraulics Draw like a CAD pro The speed is no magic We are constantly
FluidSIM 4 The training-all-rounder Two outstanding companions for successful training: FluidSIM 4.0 and the poster set for pneumatics and hydraulics Draw like a CAD pro The speed is no magic We are constantly
The Scope of Computer Control within Technology
 The Scope of Computer Control within Technology Computer control offers a productive medium for making progress in the study of systems within Technology. In this review Mike Bostock explains where control
The Scope of Computer Control within Technology Computer control offers a productive medium for making progress in the study of systems within Technology. In this review Mike Bostock explains where control
Project 3: Assembly, programming and commissioning of a production line with Handling station withelectrical drive and magazine and Turning station
 Project 3: Assembly, programming and commissioning of a production line with Handling station withelectrical drive and magazine and Turning station Weighting (points out of total) 41/100 time max 360 min
Project 3: Assembly, programming and commissioning of a production line with Handling station withelectrical drive and magazine and Turning station Weighting (points out of total) 41/100 time max 360 min
Trade of Sheet Metalwork. Module 7: Introduction to CNC Sheet Metal Manufacturing Unit 2: CNC Machines Phase 2
 Trade of Sheet Metalwork Module 7: Introduction to CNC Sheet Metal Manufacturing Unit 2: CNC Machines Phase 2 Table of Contents List of Figures... 4 List of Tables... 5 Document Release History... 6 Module
Trade of Sheet Metalwork Module 7: Introduction to CNC Sheet Metal Manufacturing Unit 2: CNC Machines Phase 2 Table of Contents List of Figures... 4 List of Tables... 5 Document Release History... 6 Module
5250 Servo Robot Training Systems
 5250 Servo Robot Training Systems LabVolt Series Datasheet Festo Didactic en 120 V - 60 Hz 02/2018 Table of Contents General Description 2 Robot Controller Module 3 Servo Robot Software 3 Location Pins
5250 Servo Robot Training Systems LabVolt Series Datasheet Festo Didactic en 120 V - 60 Hz 02/2018 Table of Contents General Description 2 Robot Controller Module 3 Servo Robot Software 3 Location Pins
Introduction to Robotics
 Mechatronics Introduction to Robotics Courseware Sample 39411-F0 Order no.: 39411-00 First Edition Revision level: 02/2015 By the staff of Festo Didactic Festo Didactic Ltée/Ltd, Quebec, Canada 2007 Internet:
Mechatronics Introduction to Robotics Courseware Sample 39411-F0 Order no.: 39411-00 First Edition Revision level: 02/2015 By the staff of Festo Didactic Festo Didactic Ltée/Ltd, Quebec, Canada 2007 Internet:
KORE: Basic Course KUKA Official Robot Education
 Training KUKAKA Robotics USA KORE: Basic Course KUKA Official Robot Education Target Group: School and College Students Issued: 19.09.2014 Version: KORE: Basic Course V1.1 Contents 1 Introduction to robotics...
Training KUKAKA Robotics USA KORE: Basic Course KUKA Official Robot Education Target Group: School and College Students Issued: 19.09.2014 Version: KORE: Basic Course V1.1 Contents 1 Introduction to robotics...
MECHATRONICS IN A BOX
 MECHATRONICS IN A BOX A Complete Mechatronics Solution for the Classroom amtekcompany.com Contents Introduction Programming Arduino microcontrollers Motor Control Training Course Flowcode 8 Formula AllCode
MECHATRONICS IN A BOX A Complete Mechatronics Solution for the Classroom amtekcompany.com Contents Introduction Programming Arduino microcontrollers Motor Control Training Course Flowcode 8 Formula AllCode
Closed-Loop Pneumatics Workbook TP 111
 Closed-Loop Pneumatics Workbook TP 111 Festo Didactic 094465 en Authorised applications and liability The Learning System for Automation has been developed and prepared exclusively for training in the
Closed-Loop Pneumatics Workbook TP 111 Festo Didactic 094465 en Authorised applications and liability The Learning System for Automation has been developed and prepared exclusively for training in the
TEACHING PLC IN AUTOMATION --A Case Study
 TEACHING PLC IN AUTOMATION --A Case Study Dr. George Yang, Assistant Professor And Dr. Yona Rasis, Assistant Professor Department of Engineering Technology Missouri Western State College 4525 Downs Drive
TEACHING PLC IN AUTOMATION --A Case Study Dr. George Yang, Assistant Professor And Dr. Yona Rasis, Assistant Professor Department of Engineering Technology Missouri Western State College 4525 Downs Drive
Sorting Line with Detection 9V
 536628 Sorting Line with Detection 9V I2 O8 I1 I3 C1 I5 I6 I4 Not in the picture: O5, O6, O7, O8 Circuit layout for Sorting Line with Detection Terminal no. Function Input/Output 1 color sensor I1 2 phototransistor
536628 Sorting Line with Detection 9V I2 O8 I1 I3 C1 I5 I6 I4 Not in the picture: O5, O6, O7, O8 Circuit layout for Sorting Line with Detection Terminal no. Function Input/Output 1 color sensor I1 2 phototransistor
NATIONAL UNIVERSITY OF SINGAPORE. EE3302/EE3302E Industrial Control Systems. E2: PLC Programming for Sequence Control
 NATIONAL UNIVERSITY OF SINGAPORE EE3302/EE3302E Industrial Control Systems E2: 1. Objectives The experiment is designed to provide experience in programming a modern IECcompliant PLC system for sequence
NATIONAL UNIVERSITY OF SINGAPORE EE3302/EE3302E Industrial Control Systems E2: 1. Objectives The experiment is designed to provide experience in programming a modern IECcompliant PLC system for sequence
FLEXIBLE MANUFACTURING SYSTEM. Teacher's Guide. SCORBOT-ER 4u and spectralight 200
 teklink FLEXIBLE MANUFACTURING SYSTEM SCORBOT-ER 4u and spectralight 200 Teacher's Guide Catalog # 100351 Rev.A March 2002 Copyright 2002 Intelitek Inc. Catalog No. 100351 Rev. A March 2002 Flexible Manufacturing
teklink FLEXIBLE MANUFACTURING SYSTEM SCORBOT-ER 4u and spectralight 200 Teacher's Guide Catalog # 100351 Rev.A March 2002 Copyright 2002 Intelitek Inc. Catalog No. 100351 Rev. A March 2002 Flexible Manufacturing
HEIDE EDUCATION RESOURCE
 Workshops on the run Abstracting the environment This education resource has been produced by Heide Museum of Modern Art to provide information to support education institution visits to the museum. Reproduction
Workshops on the run Abstracting the environment This education resource has been produced by Heide Museum of Modern Art to provide information to support education institution visits to the museum. Reproduction
2014 Mechatronics. Higher. Finalised Marking Instructions
 2014 Mechatronics Higher Finalised ing Instructions Scottish Qualifications Authority 2014 The information in this publication may be reproduced to support SQA qualifications only on a noncommercial basis.
2014 Mechatronics Higher Finalised ing Instructions Scottish Qualifications Authority 2014 The information in this publication may be reproduced to support SQA qualifications only on a noncommercial basis.
Vocational Training with Combined Real/Virtual Environments
 DSSHDUHGLQ+-%XOOLQJHU -=LHJOHU(GV3URFHHGLQJVRIWKHWK,QWHUQDWLRQDO&RQIHUHQFHRQ+XPDQ&RPSXWHU,Q WHUDFWLRQ+&,0 QFKHQ0DKZDK/DZUHQFH(UOEDXP9RO6 Vocational Training with Combined Real/Virtual Environments Eva
DSSHDUHGLQ+-%XOOLQJHU -=LHJOHU(GV3URFHHGLQJVRIWKHWK,QWHUQDWLRQDO&RQIHUHQFHRQ+XPDQ&RPSXWHU,Q WHUDFWLRQ+&,0 QFKHQ0DKZDK/DZUHQFH(UOEDXP9RO6 Vocational Training with Combined Real/Virtual Environments Eva
Closed-Loop Hydraulics
 Closed-Loop Hydraulics Workbook TP 511 With CD-ROM Festo Didactic 094469 en Authorised applications and liability The Learning System for Automation and Communication has been developed and prepared exclusively
Closed-Loop Hydraulics Workbook TP 511 With CD-ROM Festo Didactic 094469 en Authorised applications and liability The Learning System for Automation and Communication has been developed and prepared exclusively
Control Robotics Arm with EduCake
 Control Robotics Arm with EduCake 1. About Robotics Arm Robotics Arm (RobotArm) similar to the one in Figure-1, is used in broad range of industrial automation and manufacturing environment. This type
Control Robotics Arm with EduCake 1. About Robotics Arm Robotics Arm (RobotArm) similar to the one in Figure-1, is used in broad range of industrial automation and manufacturing environment. This type
Concepts and solutions for practically based technical education
 Concepts and solutions for practically based technical education Building management systems Electrical power engineering Renewable energies Electrical machines and drive technology UniTrain EloTrain Communications
Concepts and solutions for practically based technical education Building management systems Electrical power engineering Renewable energies Electrical machines and drive technology UniTrain EloTrain Communications
CNC Mill Training System (Heavy Duty)
") CNC Mill Training System (Heavy Duty) LabVolt Series Datasheet Festo Didactic en 120 V - 60 Hz 07/2018 Table of Contents General Description 2 Features & Benefits 3 List of Equipment 3 List of Manuals
CNC Mill Training System (Heavy Duty) LabVolt Series Datasheet Festo Didactic en 120 V - 60 Hz 07/2018 Table of Contents General Description 2 Features & Benefits 3 List of Equipment 3 List of Manuals
COURSE MODULES LEVEL 3.1 & 3.2
 COURSE MODULES LEVEL 3.1 & 3.2 6-Month Internship The six-month internship provides students with the opportunity to apply the knowledge acquired in the classroom to work situations, and demonstrate problem
COURSE MODULES LEVEL 3.1 & 3.2 6-Month Internship The six-month internship provides students with the opportunity to apply the knowledge acquired in the classroom to work situations, and demonstrate problem
Introduction to Robotics in CIM Systems
 Introduction to Robotics in CIM Systems Fifth Edition James A. Rehg The Pennsylvania State University Altoona, Pennsylvania Prentice Hall Upper Saddle River, New Jersey Columbus, Ohio Contents Introduction
Introduction to Robotics in CIM Systems Fifth Edition James A. Rehg The Pennsylvania State University Altoona, Pennsylvania Prentice Hall Upper Saddle River, New Jersey Columbus, Ohio Contents Introduction
Information for Parents/Carers Targets in Computing
 Computing Targets - A Year 1 Computer User I can create a series of instructions. I can plan a journey for a programmable toy. I can create digital content. I can store digital content. I can retrieve
Computing Targets - A Year 1 Computer User I can create a series of instructions. I can plan a journey for a programmable toy. I can create digital content. I can store digital content. I can retrieve
John Henry Foster INTRODUCING OUR NEW ROBOTICS LINE. Imagine Your Business...better. Automate Virtually Anything jhfoster.
 John Henry Foster INTRODUCING OUR NEW ROBOTICS LINE Imagine Your Business...better. Automate Virtually Anything 800.582.5162 John Henry Foster 800.582.5162 What if you could automate the repetitive manual
John Henry Foster INTRODUCING OUR NEW ROBOTICS LINE Imagine Your Business...better. Automate Virtually Anything 800.582.5162 John Henry Foster 800.582.5162 What if you could automate the repetitive manual
SWT 700/900 Fascination Sanding
 SWT 700/900 Fascination Sanding Optimat profiline powerline A B O U T B Ü T F E R I N G B Ü T F E R I N G S W T 7 0 0 / 9 0 0 Ideal range of performance SWT 700 SWT 900 Feed speed < 35m/min < 65m/min Working
SWT 700/900 Fascination Sanding Optimat profiline powerline A B O U T B Ü T F E R I N G B Ü T F E R I N G S W T 7 0 0 / 9 0 0 Ideal range of performance SWT 700 SWT 900 Feed speed < 35m/min < 65m/min Working
Robotic Installation of OSI-Bolts
 Robotic Installation of OSI-Bolts 2015-01-2512 Mark W. Sydenham and Tim Brown Electroimpact Inc. CITATION: Sydenham, M. and Brown, T., "Robotic Installation of OSI-Bolts," SAE Technical Paper 2015-01-2512,
Robotic Installation of OSI-Bolts 2015-01-2512 Mark W. Sydenham and Tim Brown Electroimpact Inc. CITATION: Sydenham, M. and Brown, T., "Robotic Installation of OSI-Bolts," SAE Technical Paper 2015-01-2512,
DESIGN OF AN AUTOMATIC COIL LATH BONDING MACHINE FOR DISTRIBUTON TRANSFORMERS
 The Eurasia Proceedings of Science, Technology, Engineering & Mathematics (EPSTEM) ISSN: 2602-3199 The Eurasia Proceedings of Science, Technology, Engineering & Mathematics (EPSTEM) Volume 1, Pages 116-122
The Eurasia Proceedings of Science, Technology, Engineering & Mathematics (EPSTEM) ISSN: 2602-3199 The Eurasia Proceedings of Science, Technology, Engineering & Mathematics (EPSTEM) Volume 1, Pages 116-122
Fundamentals of DC machines
 Fundamentals of DC machines Workbook With CD-ROM L1 N PE -T1 -T2 L+ L+ L- L- -P1 V A1 A2 E2 E1 -M1 M n 3600 1/min 3400 3200 n=f[ IE] 3000 2800 2600 2400 2200 2000 1800 30 60 90 120 150 180 210 240 270
Fundamentals of DC machines Workbook With CD-ROM L1 N PE -T1 -T2 L+ L+ L- L- -P1 V A1 A2 E2 E1 -M1 M n 3600 1/min 3400 3200 n=f[ IE] 3000 2800 2600 2400 2200 2000 1800 30 60 90 120 150 180 210 240 270
KR C4 Training courses. Overview of training courses KUKA Automatisering + Robots N.V (replaces ) Valid for 2018
 Valid for 2018") KR C4 Training courses Overview of training courses 2018-01-10 (replaces 2016-10-02) Valid for 2018 College To ensure that the skills of the workforce keep pace with technical developments, training is
KR C4 Training courses Overview of training courses 2018-01-10 (replaces 2016-10-02) Valid for 2018 College To ensure that the skills of the workforce keep pace with technical developments, training is
The modular Mechatronics Training System mms 4.0: hands-on, flexible, scalable
 The modular Mechatronics Training System mms 4.0: hands-on, flexible, scalable 2 Drive & Control Academy Your Training Partner More knowledge, more benefits: Mechatronics to touch, understand, and use
The modular Mechatronics Training System mms 4.0: hands-on, flexible, scalable 2 Drive & Control Academy Your Training Partner More knowledge, more benefits: Mechatronics to touch, understand, and use
Automatic Temporary Fastener Installation System for Wingbox Assembly
 Automatic Temporary Fastener Installation System for Wingbox Assembly Kyle Pritz and Brent Etzel Electroimpact, Inc Zheng Wei Xi an Aircraft Industry (Group) Company Ltd. ABSTRACT The automation cycle
Automatic Temporary Fastener Installation System for Wingbox Assembly Kyle Pritz and Brent Etzel Electroimpact, Inc Zheng Wei Xi an Aircraft Industry (Group) Company Ltd. ABSTRACT The automation cycle
Closed-Loop Pneumatics
 Closed-Loop Pneumatics Workbook TP 111 With CD-ROM Festo Didactic 094465 en Authorised applications and liability The Learning System for Automation has been developed and prepared exclusively for training
Closed-Loop Pneumatics Workbook TP 111 With CD-ROM Festo Didactic 094465 en Authorised applications and liability The Learning System for Automation has been developed and prepared exclusively for training
Canadian Technology Accreditation Criteria (CTAC) ELECTROMECHANICAL ENGINEERING TECHNOLOGY - TECHNICIAN Technology Accreditation Canada (TAC)
 ELECTROMECHANICAL ENGINEERING TECHNOLOGY - TECHNICIAN Technology Accreditation Canada (TAC)") Canadian Technology Accreditation Criteria (CTAC) ELECTROMECHANICAL ENGINEERING TECHNOLOGY - TECHNICIAN Technology Accreditation Canada (TAC) Preamble These CTAC are applicable to programs having titles
Canadian Technology Accreditation Criteria (CTAC) ELECTROMECHANICAL ENGINEERING TECHNOLOGY - TECHNICIAN Technology Accreditation Canada (TAC) Preamble These CTAC are applicable to programs having titles
MECHATRONICS SYSTEM DESIGN
 MECHATRONICS SYSTEM DESIGN (MtE-325) TODAYS LECTURE Control systems Open-Loop Control Systems Closed-Loop Control Systems Transfer Functions Analog and Digital Control Systems Controller Configurations
MECHATRONICS SYSTEM DESIGN (MtE-325) TODAYS LECTURE Control systems Open-Loop Control Systems Closed-Loop Control Systems Transfer Functions Analog and Digital Control Systems Controller Configurations
The Modular Mechatronic System from Rexroth. Practise-orientated, efficient, ready to use
 The Modular Mechatronic System from Rexroth Practise-orientated, efficient, ready to use Learning as in Real Life Just as the tempo of innovations cycles is constantly increasing, so do the demands on
The Modular Mechatronic System from Rexroth Practise-orientated, efficient, ready to use Learning as in Real Life Just as the tempo of innovations cycles is constantly increasing, so do the demands on
INTRODUCTION to ROBOTICS
 1 INTRODUCTION to ROBOTICS Robotics is a relatively young field of modern technology that crosses traditional engineering boundaries. Understanding the complexity of robots and their applications requires
1 INTRODUCTION to ROBOTICS Robotics is a relatively young field of modern technology that crosses traditional engineering boundaries. Understanding the complexity of robots and their applications requires
Industrial Maintenance Technology (INT)
") Technology 199 The College for Real Careers Technology (INT) Program Information The Technology Program at H. Councill Trenholm State Community College is a multi-craft curriculum. Many crafts are a part
Technology 199 The College for Real Careers Technology (INT) Program Information The Technology Program at H. Councill Trenholm State Community College is a multi-craft curriculum. Many crafts are a part
The Smart Production Laboratory: A Learning Factory for Industry 4.0 Concepts
 The Smart Production Laboratory: A Learning Factory for Industry 4.0 Concepts Marco Nardello 1 ( ), Ole Madsen 1, Charles Møller 1 1 Aalborg University, Department of Materials and Production Fibigerstræde
The Smart Production Laboratory: A Learning Factory for Industry 4.0 Concepts Marco Nardello 1 ( ), Ole Madsen 1, Charles Møller 1 1 Aalborg University, Department of Materials and Production Fibigerstræde
Milind R. Shinde #1, V. N. Bhaiswar *2, B. G. Achmare #3 1 Student of MTECH CAD/CAM, Department of Mechanical Engineering, GHRCE Nagpur, MH, India
 Design and simulation of robotic arm for loading and unloading of work piece on lathe machine by using workspace simulation software: A Review Milind R. Shinde #1, V. N. Bhaiswar *2, B. G. Achmare #3 1
Design and simulation of robotic arm for loading and unloading of work piece on lathe machine by using workspace simulation software: A Review Milind R. Shinde #1, V. N. Bhaiswar *2, B. G. Achmare #3 1
Gael Force FRC Team 126
 Gael Force FRC Team 126 2018 FIRST Robotics Competition 2018 Robot Information and Specs Judges Information Packet Gael Force is proof that one team from a small town can have an incredible impact on many
Gael Force FRC Team 126 2018 FIRST Robotics Competition 2018 Robot Information and Specs Judges Information Packet Gael Force is proof that one team from a small town can have an incredible impact on many
Matrix Screw Test Station. Team Synthes:
 Matrix Screw Test Station Team Synthes: Outline Introduction Sponsor Background Introduction to the Matrix Screw Assembly overview Our testing station Project scope, realization of wants and metrics Concept
Matrix Screw Test Station Team Synthes: Outline Introduction Sponsor Background Introduction to the Matrix Screw Assembly overview Our testing station Project scope, realization of wants and metrics Concept
-SQA- SCOTTISH QUALIFICATIONS AUTHORITY HIGHER NATIONAL UNIT SPECIFICATION GENERAL INFORMATION
 -SQA- SCOTTISH QUALIFICATIONS AUTHORITY HIGHER NATIONAL UNIT SPECIFICATION GENERAL INFORMATION -Unit Number- 8411894 -Superclass- CA -Title- MICROCONTROLLERS: ARCHITECTURE, PROGRAMMING AND APPLICATIONS
-SQA- SCOTTISH QUALIFICATIONS AUTHORITY HIGHER NATIONAL UNIT SPECIFICATION GENERAL INFORMATION -Unit Number- 8411894 -Superclass- CA -Title- MICROCONTROLLERS: ARCHITECTURE, PROGRAMMING AND APPLICATIONS
Screwfeeder Troubleshooting Guide
 Symptom General Cause Specific Cause Solution Illustration No Screws are being fed to the screwdriver Screw jam in screw delivery tubing Insufficient Screw Blast to deliver screw Adjust Screw Blast Inline
Symptom General Cause Specific Cause Solution Illustration No Screws are being fed to the screwdriver Screw jam in screw delivery tubing Insufficient Screw Blast to deliver screw Adjust Screw Blast Inline
Industrial Automation Training Academy. Arduino, LabVIEW & PLC Training Programs Duration: 6 Months (180 ~ 240 Hours)
") nfi Industrial Automation Training Academy Presents Arduino, LabVIEW & PLC Training Programs Duration: 6 Months (180 ~ 240 Hours) For: Electronics & Communication Engineering Electrical Engineering Instrumentation
nfi Industrial Automation Training Academy Presents Arduino, LabVIEW & PLC Training Programs Duration: 6 Months (180 ~ 240 Hours) For: Electronics & Communication Engineering Electrical Engineering Instrumentation
TECHNOLOGICAL STUDIES
 TECHNOLOGICAL STUDIES AIMS The aims of the syllabus are: 1. to develop technological competence through three integrated learning areas, namely (a) technological knowledge, (b) technological process and
TECHNOLOGICAL STUDIES AIMS The aims of the syllabus are: 1. to develop technological competence through three integrated learning areas, namely (a) technological knowledge, (b) technological process and
VTU BOSCH REXROTH CENTER OF COMPETENCE IN AUTOMATION TECHNOLOGIES
 VTU BOSCH REXROTH CENTER OF COMPETENCE IN AUTOMATION TECHNOLOGIES The uniqueness of this training centre lies in its state of the art technology, world class equipment, training kits, hardware, software,
VTU BOSCH REXROTH CENTER OF COMPETENCE IN AUTOMATION TECHNOLOGIES The uniqueness of this training centre lies in its state of the art technology, world class equipment, training kits, hardware, software,
Familiarization with the Servo Robot System
 Exercise 1 Familiarization with the Servo Robot System EXERCISE OBJECTIVE In this exercise, you will be introduced to the Lab-Volt Servo Robot System. In the Procedure section, you will install and connect
Exercise 1 Familiarization with the Servo Robot System EXERCISE OBJECTIVE In this exercise, you will be introduced to the Lab-Volt Servo Robot System. In the Procedure section, you will install and connect
EDUCATORS INFORMATION GUIDE
 EDUCATORS INFORMATION GUIDE TABLE OF CONTENTS Arduino Education: Inspiring, Teaching and Empowering What is Arduino? 5 The Education Team And Its Mission 5 Current Use Cases in Education 5 Features and
EDUCATORS INFORMATION GUIDE TABLE OF CONTENTS Arduino Education: Inspiring, Teaching and Empowering What is Arduino? 5 The Education Team And Its Mission 5 Current Use Cases in Education 5 Features and
CUTTING STUDENTS IMAGINATION LOOSE PAYS RICH DIVIDENDS
 CUTTING STUDENTS IMAGINATION LOOSE PAYS RICH DIVIDENDS Ashraf M. Ghaly ghalya@union.edu Union College 807 Union Street, Schenectady, NY 12308 Abstract: The Technical Drawing course is a freshman level
CUTTING STUDENTS IMAGINATION LOOSE PAYS RICH DIVIDENDS Ashraf M. Ghaly ghalya@union.edu Union College 807 Union Street, Schenectady, NY 12308 Abstract: The Technical Drawing course is a freshman level
CNC Mill Training System (Light Duty)
") CNC Mill Training System (Light Duty) LabVolt Series Datasheet Festo Didactic en 120 V - 60 Hz 07/2018 Table of Contents General Description 2 Features & Benefits 2 List of Equipment 3 List of Manuals
CNC Mill Training System (Light Duty) LabVolt Series Datasheet Festo Didactic en 120 V - 60 Hz 07/2018 Table of Contents General Description 2 Features & Benefits 2 List of Equipment 3 List of Manuals
Autonomous Robot Control Circuit
 Autonomous Robot Control Circuit - Theory of Operation - Written by: Colin Mantay Revision 1.07-06-04 Copyright 2004 by Colin Mantay No part of this document may be copied, reproduced, stored electronically,
Autonomous Robot Control Circuit - Theory of Operation - Written by: Colin Mantay Revision 1.07-06-04 Copyright 2004 by Colin Mantay No part of this document may be copied, reproduced, stored electronically,
Customer. KERN MICRO 5 axis Ultra Precision Machining Centre
 Customer KERN MICRO 5 axis Ultra Precision Machining Centre The KERN MICRO is an ultra precision machining centre with the highest level of accuracy in 5 axis configuration. The working envelope is 350
Customer KERN MICRO 5 axis Ultra Precision Machining Centre The KERN MICRO is an ultra precision machining centre with the highest level of accuracy in 5 axis configuration. The working envelope is 350
Construction of Mobile Robots
 Construction of Mobile Robots 716.091 Institute for Software Technology 1 Previous Years Conference Robot https://www.youtube.com/watch?v=wu7zyzja89i Breakfast Robot https://youtu.be/dtoqiklqcug 2 This
Construction of Mobile Robots 716.091 Institute for Software Technology 1 Previous Years Conference Robot https://www.youtube.com/watch?v=wu7zyzja89i Breakfast Robot https://youtu.be/dtoqiklqcug 2 This
CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM
 CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM Aniket D. Kulkarni *1, Dr.Sayyad Ajij D. *2 *1(Student of E&C Department, MIT Aurangabad, India) *2(HOD of E&C department, MIT Aurangabad, India) aniket2212@gmail.com*1,
CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM Aniket D. Kulkarni *1, Dr.Sayyad Ajij D. *2 *1(Student of E&C Department, MIT Aurangabad, India) *2(HOD of E&C department, MIT Aurangabad, India) aniket2212@gmail.com*1,
Modular transfer system. PDF- Catalog Modular Transfer System
 Modular transfer system PDF- Catalog Modular Transfer System 1 Modular Transfer System TLM 1000 156, route de Lyon 38300 DOMARIN FRANCE Phone (33) 4 37 03 33 55 Fax (33) 4 37 03 33 59 September 2001 edition
Modular transfer system PDF- Catalog Modular Transfer System 1 Modular Transfer System TLM 1000 156, route de Lyon 38300 DOMARIN FRANCE Phone (33) 4 37 03 33 55 Fax (33) 4 37 03 33 59 September 2001 edition
HALTER AUTOMATION. It s gripping stuff...
 HALTER AUTOMATION It s gripping stuff... Hyfore is the UK distributor for Halter CNC Automation, the Netherlands based supplier of machine tool robotic loading and unloading systems. Sitting alongside
HALTER AUTOMATION It s gripping stuff... Hyfore is the UK distributor for Halter CNC Automation, the Netherlands based supplier of machine tool robotic loading and unloading systems. Sitting alongside
HIGH SPEED CUTTING QUANTITY Excellence in cutting
 HYDRAULIC SWING SHEAR MS7-4x2500 HIGH SPEED CUTTING QUANTITY Excellence in cutting STANDARDS: - Swing beam shesrs with Euro design - ESTUN E21s NC Controller System - Motorized blade gap adjustment - 600mm
HYDRAULIC SWING SHEAR MS7-4x2500 HIGH SPEED CUTTING QUANTITY Excellence in cutting STANDARDS: - Swing beam shesrs with Euro design - ESTUN E21s NC Controller System - Motorized blade gap adjustment - 600mm
Qualification Specification. Level 1 Diploma in Providing a Gateway to Smart Engineering
 Qualification Specification Level 1 Diploma in Providing a Gateway to Smart Engineering ProQual 2017 Contents Page Introduction 3 Qualification profile 3 Centre requirements 5 Support for candidates 5
Qualification Specification Level 1 Diploma in Providing a Gateway to Smart Engineering ProQual 2017 Contents Page Introduction 3 Qualification profile 3 Centre requirements 5 Support for candidates 5
Sensors for Automated Assembly
 Home Sensors for Automated Assembly The typical multistation automated assembly system is equipped with myriad sensors. By John Sprovieri June 3, 2014 Assembly machines are dumb. They can only do what
Home Sensors for Automated Assembly The typical multistation automated assembly system is equipped with myriad sensors. By John Sprovieri June 3, 2014 Assembly machines are dumb. They can only do what
WHEN A PLC IS TOO MUCH, AND SPACE FOR
 WHEN A PLC IS TOO MUCH, AND SPACE FOR A RELAY SEQUENCE CIRCUIT IS TOO LITTLE Pattern Selector 59 2.33 66 2.6 70 2.75 No programming required Select from among 15 preset patterns Wiring far simpler than
WHEN A PLC IS TOO MUCH, AND SPACE FOR A RELAY SEQUENCE CIRCUIT IS TOO LITTLE Pattern Selector 59 2.33 66 2.6 70 2.75 No programming required Select from among 15 preset patterns Wiring far simpler than
in the New Zealand Curriculum
 Technology in the New Zealand Curriculum We ve revised the Technology learning area to strengthen the positioning of digital technologies in the New Zealand Curriculum. The goal of this change is to ensure
Technology in the New Zealand Curriculum We ve revised the Technology learning area to strengthen the positioning of digital technologies in the New Zealand Curriculum. The goal of this change is to ensure
Seminars Automation Academy Denmark
 Seminars Automation Academy Denmark Applied Automation Engineer by B&R Denmark Innovating and sustaining advanced production systems requires well-educated, highlytrained employees. Training lays the foundation
Seminars Automation Academy Denmark Applied Automation Engineer by B&R Denmark Innovating and sustaining advanced production systems requires well-educated, highlytrained employees. Training lays the foundation
CORE CURRICULUM OF VOCATIONAL TRAINING
 CORE CURRICULUM OF VOCATIONAL TRAINING Prepared on the basis of the document dated 7 February 2012 CNC machine tool operator 722307 Vocational education is aimed to prepare learner for life in the contemporary
CORE CURRICULUM OF VOCATIONAL TRAINING Prepared on the basis of the document dated 7 February 2012 CNC machine tool operator 722307 Vocational education is aimed to prepare learner for life in the contemporary
XTS: Significantly higher performance and simplified engineering with TwinCAT. products PC Control
 products PC Control 04 2012 Position calculation Velocity calculation Position control Velocity control Phase transformation Position sensor signals Complete lt control cycle for all movers in 250 μs Set
products PC Control 04 2012 Position calculation Velocity calculation Position control Velocity control Phase transformation Position sensor signals Complete lt control cycle for all movers in 250 μs Set
ECE 396 Senior Design I
 ECE 396 Senior Design I Spring 2012 Semester Lecture 1 Introduction to Senior Design Instructor: Dr. Vahe Caliskan vahe@uic.edu http://www.uic.edu/~vahe This course teaches: Engineering design Project
ECE 396 Senior Design I Spring 2012 Semester Lecture 1 Introduction to Senior Design Instructor: Dr. Vahe Caliskan vahe@uic.edu http://www.uic.edu/~vahe This course teaches: Engineering design Project
Industrial Maintenance Mechanics
 Measuring What Matters in Job Ready Assessment Blueprint Industrial Maintenance Mechanics Test Code: 2074 / Version: 01 Copyright 2007 General Assessment Information Industrial Maintenance Mechanics Blueprint
Measuring What Matters in Job Ready Assessment Blueprint Industrial Maintenance Mechanics Test Code: 2074 / Version: 01 Copyright 2007 General Assessment Information Industrial Maintenance Mechanics Blueprint
ROBOTIC AUTOMATION Imagine Your Business...better. Automate Virtually Anything
 John Henry Foster ROBOTIC AUTOMATION Imagine Your Business...better. Automate Virtually Anything 800.582.5162 John Henry Foster 800.582.5162 At John Henry Foster, we re devoted to bringing safe, flexible,
John Henry Foster ROBOTIC AUTOMATION Imagine Your Business...better. Automate Virtually Anything 800.582.5162 John Henry Foster 800.582.5162 At John Henry Foster, we re devoted to bringing safe, flexible,
K-BUS Switch Actuator
 K-BUS Switch Actuator User manual-ver. 2 KA/R0416.1 KA/R0816.1 KA/R1216.1 Contents Contents... 2 1. Introduction... 3 1.1 Product and function overview... 3 2. Technical Properties... 3 3. Commissioning...
K-BUS Switch Actuator User manual-ver. 2 KA/R0416.1 KA/R0816.1 KA/R1216.1 Contents Contents... 2 1. Introduction... 3 1.1 Product and function overview... 3 2. Technical Properties... 3 3. Commissioning...
AURIGA. The standard for modern cabinet makers PRODUCTIVITY AND PRECISION
 Edgebanders CNC Machining Centers Vertical Panel Saws Pressure Beam Saws Panel Handling The standard for modern cabinet makers AURIGA PRODUCTIVITY AND PRECISION AURIGA Top features for maximum productivity
Edgebanders CNC Machining Centers Vertical Panel Saws Pressure Beam Saws Panel Handling The standard for modern cabinet makers AURIGA PRODUCTIVITY AND PRECISION AURIGA Top features for maximum productivity
 UNIT-1 INTRODUCATION The field of robotics has its origins in science fiction. The term robot was derived from the English translation of a fantasy play written in Czechoslovakia around 1920. It took another
UNIT-1 INTRODUCATION The field of robotics has its origins in science fiction. The term robot was derived from the English translation of a fantasy play written in Czechoslovakia around 1920. It took another
Design and technology
 Design and technology Programme of study for key stage 3 and attainment target (This is an extract from The National Curriculum 2007) Crown copyright 2007 Qualifications and Curriculum Authority 2007 Curriculum
Design and technology Programme of study for key stage 3 and attainment target (This is an extract from The National Curriculum 2007) Crown copyright 2007 Qualifications and Curriculum Authority 2007 Curriculum
Circular Cold Saws and Systems for every application. Competence in Circular Cold Sawing Technology
 Circular Cold Saws and Systems for every application Competence in Circular Cold Sawing Technology 2 VMS-Range Vertical Circular Cold Saws Manual, semi-automatic and automatic machines Robust and durable.
Circular Cold Saws and Systems for every application Competence in Circular Cold Sawing Technology 2 VMS-Range Vertical Circular Cold Saws Manual, semi-automatic and automatic machines Robust and durable.
AUTOMATION ACCESSORIES
 RG SERIES AUTOMATION ACCESSORIES The Vision System Faster than contact probes, the ultra-highspeed vision system gives integrated, closed loop control of the machine using the image from the camera. The
RG SERIES AUTOMATION ACCESSORIES The Vision System Faster than contact probes, the ultra-highspeed vision system gives integrated, closed loop control of the machine using the image from the camera. The
VISES VISES JAWS CENTERING CLAMP BASE PLATE COMPACT PNEUMATIC VISE PAIR OF CLAMPS PAIR OF POSITIONING KEYS PAIR OF POSITIONING KEYS VISES
 CENTERING CLAMP JAWS BASE PLATE Part No. CP170 Part No. CP175 Part No. CP179 COMPACT PNEUMATIC VISE Part No. AMLFV-S PAIR OF CLAMPS Part No. MVAC-CS PAIR OF POSITIONING KEYS Part No. MVAC-SK PAIR OF POSITIONING
CENTERING CLAMP JAWS BASE PLATE Part No. CP170 Part No. CP175 Part No. CP179 COMPACT PNEUMATIC VISE Part No. AMLFV-S PAIR OF CLAMPS Part No. MVAC-CS PAIR OF POSITIONING KEYS Part No. MVAC-SK PAIR OF POSITIONING
Teciam. Part L. CNC Technology
 Teciam Part L Teciam > Basic Technologies > Contents Table of Contents Introduction Introduction... L-3 Training Approach Training Approach... L-3 Diversified Training Diversified Training... L-4 Technology
Teciam Part L Teciam > Basic Technologies > Contents Table of Contents Introduction Introduction... L-3 Training Approach Training Approach... L-3 Diversified Training Diversified Training... L-4 Technology
A Brief Description of the Testing Station in Festo Modular Production System (MPS)
") A Brief Description of the Testing Station in Festo Modular Production System (MPS) Figure 1 Distribution station (left) and testing station (right) 1 Introduction The purpose of this document is to describe
A Brief Description of the Testing Station in Festo Modular Production System (MPS) Figure 1 Distribution station (left) and testing station (right) 1 Introduction The purpose of this document is to describe
Design and Manufacturing Curriculum in Industrial Engineering at Mercer University
 Design and Manufacturing Curriculum in Industrial Engineering at Mercer University R. Radharamanan 1 Abstract This paper presents an overview of design and manufacturing curriculum in effect at Mercer
Design and Manufacturing Curriculum in Industrial Engineering at Mercer University R. Radharamanan 1 Abstract This paper presents an overview of design and manufacturing curriculum in effect at Mercer
RIVERSDALE PRIMARY SCHOOL. Design & Technology Policy
 RIVERSDALE PRIMARY SCHOOL Design & Technology Policy EQUALITY At Riversdale we have due regard for our duties under the Equality Act 2010. Through the use of the library, we will ensure that we: eliminate
RIVERSDALE PRIMARY SCHOOL Design & Technology Policy EQUALITY At Riversdale we have due regard for our duties under the Equality Act 2010. Through the use of the library, we will ensure that we: eliminate
T.C. MARMARA UNIVERSITY FACULTY of ENGINEERING COMPUTER ENGINEERING DEPARTMENT
 T.C. MARMARA UNIVERSITY FACULTY of ENGINEERING COMPUTER ENGINEERING DEPARTMENT CSE497 Engineering Project Project Specification Document INTELLIGENT WALL CONSTRUCTION BY MEANS OF A ROBOTIC ARM Group Members
T.C. MARMARA UNIVERSITY FACULTY of ENGINEERING COMPUTER ENGINEERING DEPARTMENT CSE497 Engineering Project Project Specification Document INTELLIGENT WALL CONSTRUCTION BY MEANS OF A ROBOTIC ARM Group Members
Actuators in Automatic Control System
 Actuators in Automatic Control System Measurement & Control Systems Transducers Measurement Process Actuators Data processing Requirement analyses Decision making Control actions CONTROL action requires
Actuators in Automatic Control System Measurement & Control Systems Transducers Measurement Process Actuators Data processing Requirement analyses Decision making Control actions CONTROL action requires
Compact and Multifunction Controller for Parts Feeder
 New Product Compact and Multifunction Controller for Parts Feeder Kunihiko SUZUKI NTN parts feeders that automatically line up and supply parts are accepted by manufacturing in various fields, and are
New Product Compact and Multifunction Controller for Parts Feeder Kunihiko SUZUKI NTN parts feeders that automatically line up and supply parts are accepted by manufacturing in various fields, and are
WESTERN IOWA TECH COMMUNITY COLLEGE. Course Syllabus. Electrical Technician Level 2
 Course Title: Electrical Technician Level Total Hours:56 Meeting time/ location :TBA Instructor: Chris Sewalson Phone:712-274-8733 ext1407 E-mail Chris.sewalson@witcc.edu Office Location: Lemars Center
Course Title: Electrical Technician Level Total Hours:56 Meeting time/ location :TBA Instructor: Chris Sewalson Phone:712-274-8733 ext1407 E-mail Chris.sewalson@witcc.edu Office Location: Lemars Center
these systems has increased, regardless of the environmental conditions of the systems.
 Some Student November 30, 2010 CS 5317 USING A TACTILE GLOVE FOR MAINTENANCE TASKS IN HAZARDOUS OR REMOTE SITUATIONS 1. INTRODUCTION As our dependence on automated systems has increased, demand for maintenance
Some Student November 30, 2010 CS 5317 USING A TACTILE GLOVE FOR MAINTENANCE TASKS IN HAZARDOUS OR REMOTE SITUATIONS 1. INTRODUCTION As our dependence on automated systems has increased, demand for maintenance
AGRICULTURAL TECHNOLOGY GUIDELINES FOR PRACTICAL ASSESSMENT TASKS
 AGRICULTURAL TECHNOLOGY GUIDELINES FOR PRACTICAL ASSESSMENT TASKS 2012 These guidelines consist of 14 pages. Agricultural Technology 2 DBE/PAT 2012 Table of Contents Page No. 1. Introduction 3 2. Guidelines
AGRICULTURAL TECHNOLOGY GUIDELINES FOR PRACTICAL ASSESSMENT TASKS 2012 These guidelines consist of 14 pages. Agricultural Technology 2 DBE/PAT 2012 Table of Contents Page No. 1. Introduction 3 2. Guidelines
PARKER HANNIFIN TEST STAND
 PARKER HANNIFIN TEST STAND Dan Laird Abstract This paper will review a partnership between Parker-Hannifin Mobile Cylinders and Youngstown State University (YSU). The Mobile Cylinders Group makes hydraulic
PARKER HANNIFIN TEST STAND Dan Laird Abstract This paper will review a partnership between Parker-Hannifin Mobile Cylinders and Youngstown State University (YSU). The Mobile Cylinders Group makes hydraulic
Your EdVenture into Robotics 10 Lesson plans
 Your EdVenture into Robotics 10 Lesson plans Activity sheets and Worksheets Find Edison Robot @ Search: Edison Robot Call 800.962.4463 or email custserv@ Lesson 1 Worksheet 1.1 Meet Edison Edison is a
Your EdVenture into Robotics 10 Lesson plans Activity sheets and Worksheets Find Edison Robot @ Search: Edison Robot Call 800.962.4463 or email custserv@ Lesson 1 Worksheet 1.1 Meet Edison Edison is a
CompactLoader Dynamic perfection
 Dynamic perfection Double or single gripper arrangement Workpiece changeover time under 3 s Space requirement less than 6 m² No tools required for set up / set up less than 180 s Semiautomatic intuitive
Dynamic perfection Double or single gripper arrangement Workpiece changeover time under 3 s Space requirement less than 6 m² No tools required for set up / set up less than 180 s Semiautomatic intuitive
Introduction. ELCT903, Sensor Technology Electronics and Electrical Engineering Department 1. Dr.-Eng. Hisham El-Sherif
 Introduction In automation industry every mechatronic system has some sensors to measure the status of the process variables. The analogy between the human controlled system and a computer controlled system
Introduction In automation industry every mechatronic system has some sensors to measure the status of the process variables. The analogy between the human controlled system and a computer controlled system
Always a step ahead... because zero point clamping has an origin!
 Always a step ahead...... because zero point clamping has an origin! COMPACT RELIABLE FLEXIBLE STARK zero point clamping systems INNOVATIONS & SOLUTIONS www.stark-inc.com Zero point-based flexibility due
Always a step ahead...... because zero point clamping has an origin! COMPACT RELIABLE FLEXIBLE STARK zero point clamping systems INNOVATIONS & SOLUTIONS www.stark-inc.com Zero point-based flexibility due