Low cost underwater exploration vehicle
|
|
|
- Thomas Bishop
- 6 years ago
- Views:
Transcription
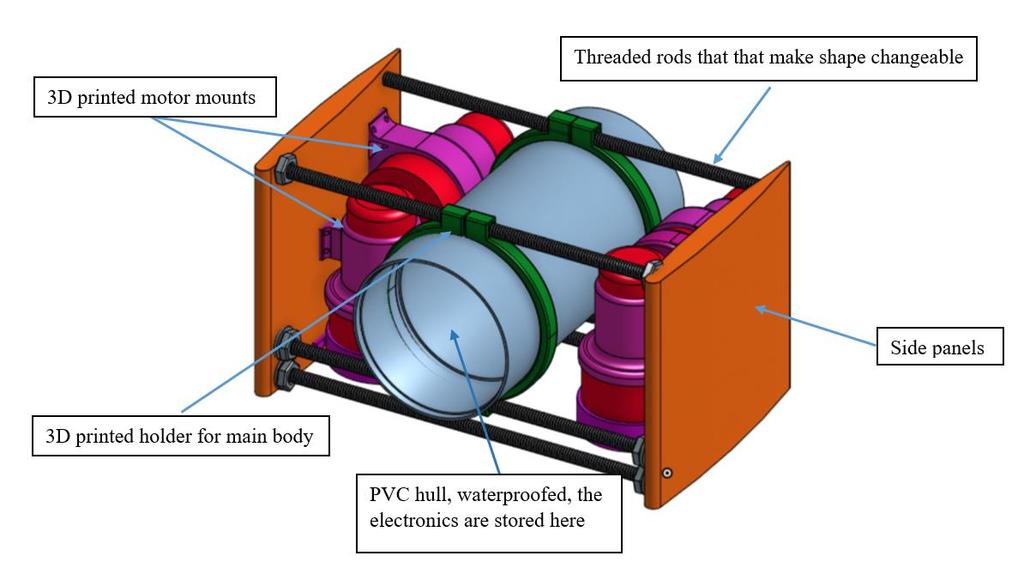
1 PROJECT N 36 Low cost underwater exploration vehicle David O Brien-Møller European School Brussels III Boulevard du Triomphe 135, 1050 Ixelles, Belgique S6 ENA Abstract Key words: Under Water robot, independent researchers The purpose of my project is to construct a low cost underwater exploration vehicle. Using joysticks as controls the operator on land can manoeuvre the vehicle through the water while receiving a live feed hfrom a camera mounted within it. This project will be Open-Source, all the files, such as the 3D printing files for parts, will be published letting any researcher anywhere construct their own robot, since it uses low cost easily available components. It will cost 200 euros in comparison to the cheapest similar robot which costs 899 dollars. It can be used for observing wildlife, and gather temperature data. The robot can have a small waterproof camera mounted on it to take good pictures and can support sensors such as temperature sensors to gather data. The robot unlike other ROVs allows for easy modification of form and function as is later discussed. The vehicle is easily converted to other uses, as it s body is positioned on threaded rods, which allow for fast and simple shape changes and for easy swapping of any attachments the researcher wishes to add or remove from their robot. The attachment that I will construct for the robot is a grabbing tool that can be used to collect scientific samples or rubbish. My robot is ideally suited to these tasks as it is small (30cm width by 25 cm length by 15 cm height), in its current form, and can access places inaccessible to divers or larger submersibles. This robot is more a platform that allows anybody to modulate and change to suit their desires. 1
2 2

3 1. Introduction Humans have explored less the 5% of the oceans floor, in the words of Robert D. Ballard, the discoverer of the Titanic wreck, Only a tiny percentage of the ocean floor has been carefully mapped, which means we know less about 71 percent of the Earth s landscape than about the far side of the Moon This means that the ocean is the last big unknown for the human race here on earth, the last place waiting for us to explore. I believe that all of us should have the opportunity to be able to do that exploration, it shouldn t just be the role of organisations, small researches should also be allowed to advance the knowledge of the human race. Therefore, I am in the process at the moment of creating a new underwater drone that anyone can build. It is designed with it being open to everyone in mind, this means that most of the pieces are 3D printed, as now almost everyone can have access to such a machine, and all other components have an extremely low cost, which allows the entire construction to cost less than 200 euros. This democratization is happening in every sector of scientific research, even in space exploration, and now with tools such as 3D printing and easy to use microcontrollers such as the Arduino, which allow everyone to relatively easily create their own custom data collection tools, that if they are open source can be improved upon by everyone. Even space research is becoming easier to access by citizens. 2. Materials For this project, I am using: 30M of Ethernet wire to carry video signal from the webcam on board the robot to the surface 3



4 Joysticks 30M of speaker wire to carry I2c communications from the surface to the robot An Arduino in the robot to acquire incoming data and control the robot from that 4



5 A PyBoard on the surface to send information from joysticks to the Arduino in the water PVC tube to provide a waterproof hull to store the electronics An Ethernet to USB converter, to send the USB webcam signals through the Ethernet 5



6 An LED ring to provide light A lipo battery to provide the power A plexiglass circle to allow the robot s camera to see through the front of it 6



7 4 Converted bilge pumps to thrusters Waterproof seals Voltage regulators 7



8 Temperature Sensor SD card shield for Arduino Threaded steel bars Nuts and bolts 8




9 Many miscellaneous 3D printed parts A webcam Motor controllers A waterproof servo motor 9
10 3. Method My method consists of trying and testing, seeing what works and what doesn t so it has followed this order: 1) Designed the Computer aided model for the robot 2) Designed the circuit 3) 3D printed the parts 4) Assembled the parts into a rough prototype 5) Assembled the electronics 6) Program the electronics 7) Final completely waterproof assembly 8) Publish files on the internet 4. Results The results so far are a primary stage prototype of what the final machine will look like. To date, all the necessary files have been designed and 3D printed, the Arduino code and python code has been developed, but still isn t functioning with 30M cable, but works perfectly with jumper wires connecting the two. The wooden side panels in the pictures are only temporary as they allowed me to visualise how the robot will look and accurately design the side panels that will be lasercut out of acrylic. How does it work? The robot has two microcontrollers, one on the surface, one in the actual robot. The role of the microcontroller on the surface is to take messages from the human controller to the microcontroller in the robot who executes tasks depending on these signals. The PyBoard will be the microcontroller on the surface and is connected to two joysticks, these joysticks will control the forward/backward turn left/turn right and up/down movement of the robot. The Arduino Uno inside the robot receives a number from the PyBoard and executes the function which corresponds to the number. For example, if I were to send 1 through the I2c communication, the Arduino would turn the LED ring on. These packets of information should be send 100 times a second, and have a starting number and a stopping number so the Arduino can store the commands in an array and execute them and then only start refreshing the array when it receives the starting number. 10

11 At the same time the Arduino also writes temperature data to the SD card connected to it by the SD card reader, this is done independently of the PyBoard and it write the data once ever loop. The motors are connected to the Arduino through motor controller circuits, that allow for easy reversal of direction. Each motor draws approximately 2 Amps of current going at full speed, which is why I will use PWM to slow them down and hopefully make them draw less current. The robot can turn in the water by counter rotating the two propellers on the end of it, can advance by turning them both on to turn the same direction, and can go up or down by rotating the propellers on the vertical axis in a certain direction. The grabber tool is simply a 3D printed attachment to a waterproof servo motor that can open or close depending what is sent through the PyBoard. The webcam s video is transmitted through the 30M of Ethernet cable after passing through the Ethernet to USB converter. The robot should have a final functional operational depth of approximately 5M but this can be improved by changing the material of the hull. 11


12 5. Discussion The work that is needed to put into the project is more than I anticipated, which accounts for the fact that there is only a prototype available now. But soon hopefully the entire project should be finished and all the files will be available for anyone to use and improve upon. The software is still proving a problem, especially trying to get communication through 30M of wire. The solutions I have come up to overcome this problem is changing the frequency of the I^2C signal, as the lower the frequency of the clock the better the signal should in theory transmit. If this fails I 12
13 might replace the Arduino with another python driven device as this allows for quicker troubleshooting in my opinion. If there is still a problem with the communication I will possibly try other solutions such as using SPI communication, but I will be forced to redesign major parts of my project. Even though the robot does require expensive tools to construct, these are becoming more and more available as time progresses, and even people without a 3D printer can order the parts from 3D printing services at a low price. The robot I believe is truly open to anyone willing to invest a bit of time into learning the Arduino C and python programming languages, and they are intuitive to use and hopefully my code should make it clear how to modify parts to suit your needs. The beauty of the design is that it can almost do anything, it has a 30M long length range, has a relatively high velocity due to the power and size of the motors, can be made extremely small, has a 5M depth rating and is modular, so anyone can add their own tools, edit the code and use the robot for their own scientific research in any water bodies, such as under ice for example, or inspecting the bottom of boats, or as I intend to use mine, monitoring marine life in Skagen harbour in Denmark where swimming is of course forbidden. The possibilities for it are practically endless and I would hope that at least one person would find my work useful or be inspired to build their own version of the ROV. Conclusion So far, I have stayed within the 200-euro budget, and I do not see myself overspending it. The project is in progress to be finished in an extremely short period and should function as expected. 6. Acknowledgements I would like to thank Mrs Schallhorn and of course Mr Theocharopoulos for their guidance and push to participate in the competition. I would also like to thank the community at the Brussels Fablab for their advice and help in using the machines available there. 7. References price of Open ROV accessed on the 15/02/ Open space agency website, accessed on the 15/02/ Article on the need to explore the sea, written by Robert D. Ballard, accessed on the 15/02/
Project Proposal. Underwater Fish 02/16/2007 Nathan Smith,
 Project Proposal Underwater Fish 02/16/2007 Nathan Smith, rahteski@gwu.edu Abstract The purpose of this project is to build a mechanical, underwater fish that can be controlled by a joystick. The fish
Project Proposal Underwater Fish 02/16/2007 Nathan Smith, rahteski@gwu.edu Abstract The purpose of this project is to build a mechanical, underwater fish that can be controlled by a joystick. The fish
ALEV Robotics KF-1500S ALEV HIGH SCHOOL ISTANBUL, TURKEY MATE ROV 2016
 ALEV Robotics KF-1500S ALEV HIGH SCHOOL ISTANBUL, TURKEY MATE ROV 2016 Members Grade Eren Aşkın (CEO) 11 Can Yelten (Programmer-Pilot) 11 Tuna Barış Ünal (Menager) 11 Cengizcan Nakıboğlu (Pilot) 11 Erdal
ALEV Robotics KF-1500S ALEV HIGH SCHOOL ISTANBUL, TURKEY MATE ROV 2016 Members Grade Eren Aşkın (CEO) 11 Can Yelten (Programmer-Pilot) 11 Tuna Barış Ünal (Menager) 11 Cengizcan Nakıboğlu (Pilot) 11 Erdal
Programming 2 Servos. Learn to connect and write code to control two servos.
 Programming 2 Servos Learn to connect and write code to control two servos. Many students who visit the lab and learn how to use a Servo want to use 2 Servos in their project rather than just 1. This lesson
Programming 2 Servos Learn to connect and write code to control two servos. Many students who visit the lab and learn how to use a Servo want to use 2 Servos in their project rather than just 1. This lesson
ENGI1020. Lab 0 Introduction to Arduino IDE and Hardware Lori Hogan, Lab Instructor - Winter 2019
 ENGI1020 Lab 0 Introduction to Arduino IDE and Hardware Lori Hogan, Lab Instructor - lehogan@mun.ca Winter 2019 What are we doing today? Overview of lab procedures, schedules, assessment Introduction to
ENGI1020 Lab 0 Introduction to Arduino IDE and Hardware Lori Hogan, Lab Instructor - lehogan@mun.ca Winter 2019 What are we doing today? Overview of lab procedures, schedules, assessment Introduction to
AUTONOMOUS UNDERWATER VEHICLE Introductory Session. January 07, 2017 IITK
 AUTONOMOUS UNDERWATER VEHICLE Introductory Session January 07, 2017 IITK Purpose of an AUV Pluto Plus AUV Remus AUV Battlespace Preparation AUV Cornell AUV: Gemini COMMERCIAL Maps of Seafloor Building
AUTONOMOUS UNDERWATER VEHICLE Introductory Session January 07, 2017 IITK Purpose of an AUV Pluto Plus AUV Remus AUV Battlespace Preparation AUV Cornell AUV: Gemini COMMERCIAL Maps of Seafloor Building
UNIT 4 VOCABULARY SKILLS WORK FUNCTIONS QUIZ. A detailed explanation about Arduino. What is Arduino? Listening
 UNIT 4 VOCABULARY SKILLS WORK FUNCTIONS QUIZ 4.1 Lead-in activity Find the missing letters Reading A detailed explanation about Arduino. What is Arduino? Listening To acquire a basic knowledge about Arduino
UNIT 4 VOCABULARY SKILLS WORK FUNCTIONS QUIZ 4.1 Lead-in activity Find the missing letters Reading A detailed explanation about Arduino. What is Arduino? Listening To acquire a basic knowledge about Arduino
Team S.S. Minnow RoboBoat 2015
 1 Team RoboBoat 2015 Abigail Butka Daytona Beach Homeschoolers Palm Coast Florida USA butkaabby872@gmail.com Nick Serle Daytona Beach Homeschoolers Flagler Beach, Florida USA Abstract This document describes
1 Team RoboBoat 2015 Abigail Butka Daytona Beach Homeschoolers Palm Coast Florida USA butkaabby872@gmail.com Nick Serle Daytona Beach Homeschoolers Flagler Beach, Florida USA Abstract This document describes
Midwest Precision Aquatics
 Morgan Park Academy Chicago, Illinois Team Members: Jeffrey Eichinger CEO & Engineer - 10 Natalie Heniff CFO - 10 Mr. Aaron Lee Mentor Myles Bula Programmer Extraordinaire - 12 Pramukh Sreerama Team Engineer
Morgan Park Academy Chicago, Illinois Team Members: Jeffrey Eichinger CEO & Engineer - 10 Natalie Heniff CFO - 10 Mr. Aaron Lee Mentor Myles Bula Programmer Extraordinaire - 12 Pramukh Sreerama Team Engineer
TEAM AERO-I TEAM AERO-I JOURNAL PAPER DELHI TECHNOLOGICAL UNIVERSITY Journal paper for IARC 2014
 TEAM AERO-I TEAM AERO-I JOURNAL PAPER DELHI TECHNOLOGICAL UNIVERSITY DELHI TECHNOLOGICAL UNIVERSITY Journal paper for IARC 2014 2014 IARC ABSTRACT The paper gives prominence to the technical details of
TEAM AERO-I TEAM AERO-I JOURNAL PAPER DELHI TECHNOLOGICAL UNIVERSITY DELHI TECHNOLOGICAL UNIVERSITY Journal paper for IARC 2014 2014 IARC ABSTRACT The paper gives prominence to the technical details of
EDUCATORS INFORMATION GUIDE
 EDUCATORS INFORMATION GUIDE TABLE OF CONTENTS Arduino Education: Inspiring, Teaching and Empowering What is Arduino? 5 The Education Team And Its Mission 5 Current Use Cases in Education 5 Features and
EDUCATORS INFORMATION GUIDE TABLE OF CONTENTS Arduino Education: Inspiring, Teaching and Empowering What is Arduino? 5 The Education Team And Its Mission 5 Current Use Cases in Education 5 Features and
Megamark Arduino Library Documentation
 Megamark Arduino Library Documentation The Choitek Megamark is an advanced full-size multipurpose mobile manipulator robotics platform for students, artists, educators and researchers alike. In our mission
Megamark Arduino Library Documentation The Choitek Megamark is an advanced full-size multipurpose mobile manipulator robotics platform for students, artists, educators and researchers alike. In our mission
Mag Lev Train 1. By: Paul Friend. Project Advisor: Dr. Anakwa. Date:
 Mag Lev Train 1 By: Paul Friend Project Advisor: Dr. Anakwa Date: October 28, 2003 The Mag Lev Train 1 project is to design and implement an active levitation, guidance, and propulsion system for a model
Mag Lev Train 1 By: Paul Friend Project Advisor: Dr. Anakwa Date: October 28, 2003 The Mag Lev Train 1 project is to design and implement an active levitation, guidance, and propulsion system for a model
Roborodentia Final Report
 California Polytechnic State University, SLO College of Engineering Computer Engineering Program Roborodentia Final Report Submitted by: Zeph Nord, Mitchell Myjak, Trevor Gesell June 2018 Faculty Advisor:
California Polytechnic State University, SLO College of Engineering Computer Engineering Program Roborodentia Final Report Submitted by: Zeph Nord, Mitchell Myjak, Trevor Gesell June 2018 Faculty Advisor:
Mechatronics Project Report
 Mechatronics Project Report Introduction Robotic fish are utilized in the Dynamic Systems Laboratory in order to study and model schooling in fish populations, with the goal of being able to manage aquatic
Mechatronics Project Report Introduction Robotic fish are utilized in the Dynamic Systems Laboratory in order to study and model schooling in fish populations, with the goal of being able to manage aquatic
HB-25 Motor Controller (#29144)
") Web Site: www.parallax.com Forums: forums.parallax.com Sales: sales@parallax.com Technical: support@parallax.com Office: (916) 624-8333 Fax: (916) 624-8003 Sales: (888) 512-1024 Tech Support: (888) 997-8267
Web Site: www.parallax.com Forums: forums.parallax.com Sales: sales@parallax.com Technical: support@parallax.com Office: (916) 624-8333 Fax: (916) 624-8003 Sales: (888) 512-1024 Tech Support: (888) 997-8267
Ozobot Bit. Computer Science Engineering Program
 3 rd Grade Ozobot Bit Computer Science Engineering Program Post Visit Activity Resources 2018 Winter/Spring 2018 Dear Third Grade Visiting Classroom Teacher, It is hoped that you and your students enjoyed
3 rd Grade Ozobot Bit Computer Science Engineering Program Post Visit Activity Resources 2018 Winter/Spring 2018 Dear Third Grade Visiting Classroom Teacher, It is hoped that you and your students enjoyed
Phoenix Robotics 2015 MATE Technical Report
 Phoenix Robotics 2015 MATE Technical Report Table of Contents Our Company 2 Meet the Team 3 Mission Abstract 6 Meet the Machine 7 System Schematics 8 Financial Report 9 Technical Challenges 10 Projections
Phoenix Robotics 2015 MATE Technical Report Table of Contents Our Company 2 Meet the Team 3 Mission Abstract 6 Meet the Machine 7 System Schematics 8 Financial Report 9 Technical Challenges 10 Projections
1 of 5 01/04/
 1 of 5 01/04/2004 2.02 &KXFN\SXWWLQJLWDOOWRJHWKHU :KRV&KXFN\WKHQ" is our test robot. He grown and evolved over the years as we ve hacked him around to test new modules. is ever changing, and this is a
1 of 5 01/04/2004 2.02 &KXFN\SXWWLQJLWDOOWRJHWKHU :KRV&KXFN\WKHQ" is our test robot. He grown and evolved over the years as we ve hacked him around to test new modules. is ever changing, and this is a
Two Hour Robot. Lets build a Robot.
 Lets build a Robot. Our robot will use an ultrasonic sensor and servos to navigate it s way around a maze. We will be making 2 voltage circuits : A 5 Volt for our ultrasonic sensor, sound and lights powered
Lets build a Robot. Our robot will use an ultrasonic sensor and servos to navigate it s way around a maze. We will be making 2 voltage circuits : A 5 Volt for our ultrasonic sensor, sound and lights powered
Technical Elizabeth Thomson: (Ninth Grade)
") The Underwater Research Robot Company The UR 2 Team: Technical Elizabeth Thomson: (Ninth Grade) CEO and Safety Officer Nathan Cosbitt (Ninth Grade) Pilot Sam Beatty (Ninth Grade) Pilot Savannah Thomson
The Underwater Research Robot Company The UR 2 Team: Technical Elizabeth Thomson: (Ninth Grade) CEO and Safety Officer Nathan Cosbitt (Ninth Grade) Pilot Sam Beatty (Ninth Grade) Pilot Savannah Thomson
Experiment 4.B. Position Control. ECEN 2270 Electronics Design Laboratory 1
 Experiment 4.B Position Control Electronics Design Laboratory 1 Procedures 4.B.1 4.B.2 4.B.3 4.B.4 Read Encoder with Arduino Position Control by Counting Encoder Pulses Demo Setup Extra Credit Electronics
Experiment 4.B Position Control Electronics Design Laboratory 1 Procedures 4.B.1 4.B.2 4.B.3 4.B.4 Read Encoder with Arduino Position Control by Counting Encoder Pulses Demo Setup Extra Credit Electronics
Master Op-Doc/Test Plan
 Power Supply Master Op-Doc/Test Plan Define Engineering Specs Establish battery life Establish battery technology Establish battery size Establish number of batteries Establish weight of batteries Establish
Power Supply Master Op-Doc/Test Plan Define Engineering Specs Establish battery life Establish battery technology Establish battery size Establish number of batteries Establish weight of batteries Establish
FIRST Robotics Control System
 2018/2019 FIRST Robotics Control System Team 236 1 (click on a component to go to its slide) 2 The Robot Powered solely by 12V battery RoboRIO- is the computer on the robot Controlled by Java code on the
2018/2019 FIRST Robotics Control System Team 236 1 (click on a component to go to its slide) 2 The Robot Powered solely by 12V battery RoboRIO- is the computer on the robot Controlled by Java code on the
Introducing the Quadrotor Flying Robot
 Introducing the Quadrotor Flying Robot Roy Brewer Organizer Philadelphia Robotics Meetup Group August 13, 2009 What is a Quadrotor? A vehicle having 4 rotors (propellers) at each end of a square cross
Introducing the Quadrotor Flying Robot Roy Brewer Organizer Philadelphia Robotics Meetup Group August 13, 2009 What is a Quadrotor? A vehicle having 4 rotors (propellers) at each end of a square cross
Roborodentia Robot: Tektronix. Sean Yap Advisor: John Seng California Polytechnic State University, San Luis Obispo June 8th, 2016
 Roborodentia Robot: Tektronix Sean Yap Advisor: John Seng California Polytechnic State University, San Luis Obispo June 8th, 2016 Table of Contents Introduction... 2 Problem Statement... 2 Software...
Roborodentia Robot: Tektronix Sean Yap Advisor: John Seng California Polytechnic State University, San Luis Obispo June 8th, 2016 Table of Contents Introduction... 2 Problem Statement... 2 Software...
Introduction... Specification...3. Technical data...3. System requirements...3. X400 CE fully assembled device...4. X400 basic device...
 Introduction... Specification...3 Technical data...3 System requirements...3 X400 CE fully assembled device...4 X400 basic device...4 X400 additional options...5 Acrylic case...6 Extruder...6 Ceramic heated
Introduction... Specification...3 Technical data...3 System requirements...3 X400 CE fully assembled device...4 X400 basic device...4 X400 additional options...5 Acrylic case...6 Extruder...6 Ceramic heated
1 Day Robot Building (MC40A + Aluminum Base) for Edubot 2.0
 for Edubot 2.0") 1 Day Robot Building (MC40A + Aluminum Base) for Edubot 2.0 Have you ever thought of making a mobile robot in 1 day? Now you have the chance with MC40A Mini Mobile Robot Controller + some accessories.
1 Day Robot Building (MC40A + Aluminum Base) for Edubot 2.0 Have you ever thought of making a mobile robot in 1 day? Now you have the chance with MC40A Mini Mobile Robot Controller + some accessories.
High Current DC Motor Driver Manual
 High Current DC Motor Driver Manual 1.0 INTRODUCTION AND OVERVIEW This driver is one of the latest smart series motor drivers designed to drive medium to high power brushed DC motor with current capacity
High Current DC Motor Driver Manual 1.0 INTRODUCTION AND OVERVIEW This driver is one of the latest smart series motor drivers designed to drive medium to high power brushed DC motor with current capacity
SeaCow 1.0 Technical Report
 SeaCow 1.0 Technical Report The Aquanauts 5/28/2015 Figure 1: SeaCow Aquanauts DARREN TAN (CEO) MICHAEL RUKAVINA ANDRES ROSALES CHRIS HAN (CTO) ZANIL NARSING JOSEPH REYES WES COOL (CFO) J.B. HARVEY LOGAN
SeaCow 1.0 Technical Report The Aquanauts 5/28/2015 Figure 1: SeaCow Aquanauts DARREN TAN (CEO) MICHAEL RUKAVINA ANDRES ROSALES CHRIS HAN (CTO) ZANIL NARSING JOSEPH REYES WES COOL (CFO) J.B. HARVEY LOGAN
Introduction to the EXPANSION HUB
 Introduction to the EXPANSION HUB REV ROBOTICS - EXPANSION HUB revrobotics.com ANOTHER CONTROLLER CHOICE MODERN ROBOTICS REV ROBOTICS The Expansion hub does not replace the Modern Robotics System. It is
Introduction to the EXPANSION HUB REV ROBOTICS - EXPANSION HUB revrobotics.com ANOTHER CONTROLLER CHOICE MODERN ROBOTICS REV ROBOTICS The Expansion hub does not replace the Modern Robotics System. It is
RoboTurk 2014 Team Description
 RoboTurk 2014 Team Description Semih İşeri 1, Meriç Sarıışık 1, Kadir Çetinkaya 2, Rüştü Irklı 1, JeanPierre Demir 1, Cem Recai Çırak 1 1 Department of Electrical and Electronics Engineering 2 Department
RoboTurk 2014 Team Description Semih İşeri 1, Meriç Sarıışık 1, Kadir Çetinkaya 2, Rüştü Irklı 1, JeanPierre Demir 1, Cem Recai Çırak 1 1 Department of Electrical and Electronics Engineering 2 Department
Tilt Sensor Maze Game
 Tilt Sensor Maze Game How to Setup the tilt sensor This describes how to set up and subsequently use a tilt sensor. In this particular example, we will use the tilt sensor to control a maze game, but it
Tilt Sensor Maze Game How to Setup the tilt sensor This describes how to set up and subsequently use a tilt sensor. In this particular example, we will use the tilt sensor to control a maze game, but it
Timpdon Marine. Club 500 Radio Controlled Motor Controller Model MRCS5. MRCS5 Electrical Specification. Solid State Radio Controlled Motor Controller
 Page 16 of 16 MRCS5 Electrical Specification Maximum Supply Voltage Maximum Continuous Current 2 A Maximum Stall Current [Short Term Only] 12 V Nominal A Control Circuit Supply 4.8 V to 6. V, Nominal [Derived
Page 16 of 16 MRCS5 Electrical Specification Maximum Supply Voltage Maximum Continuous Current 2 A Maximum Stall Current [Short Term Only] 12 V Nominal A Control Circuit Supply 4.8 V to 6. V, Nominal [Derived
ZX Distance and Gesture Sensor Hookup Guide
 Page 1 of 13 ZX Distance and Gesture Sensor Hookup Guide Introduction The ZX Distance and Gesture Sensor is a collaboration product with XYZ Interactive. The very smart people at XYZ Interactive have created
Page 1 of 13 ZX Distance and Gesture Sensor Hookup Guide Introduction The ZX Distance and Gesture Sensor is a collaboration product with XYZ Interactive. The very smart people at XYZ Interactive have created
Mars Rover: System Block Diagram. November 19, By: Dan Dunn Colin Shea Eric Spiller. Advisors: Dr. Huggins Dr. Malinowski Mr.
 Mars Rover: System Block Diagram November 19, 2002 By: Dan Dunn Colin Shea Eric Spiller Advisors: Dr. Huggins Dr. Malinowski Mr. Gutschlag System Block Diagram An overall system block diagram, shown in
Mars Rover: System Block Diagram November 19, 2002 By: Dan Dunn Colin Shea Eric Spiller Advisors: Dr. Huggins Dr. Malinowski Mr. Gutschlag System Block Diagram An overall system block diagram, shown in
The Motor sketch. One Direction ON-OFF DC Motor
 One Direction ON-OFF DC Motor The DC motor in your Arduino kit is the most basic of electric motors and is used in all types of hobby electronics. When current is passed through, it spins continuously
One Direction ON-OFF DC Motor The DC motor in your Arduino kit is the most basic of electric motors and is used in all types of hobby electronics. When current is passed through, it spins continuously
THE ARDUINO ENGINEERING KIT INFORMATION GUIDE ARDUINO.CC/EDUCATION
 THE ARDUINO ENGINEERING KIT INFORMATION GUIDE ARDUINO.CC/EDUCATION Includes 1-year individual user license of: In collaboration with: INSPIRING TEACHING & EMPOWERING TABLE OF CONTENTS ARDUINO EDUCATION
THE ARDUINO ENGINEERING KIT INFORMATION GUIDE ARDUINO.CC/EDUCATION Includes 1-year individual user license of: In collaboration with: INSPIRING TEACHING & EMPOWERING TABLE OF CONTENTS ARDUINO EDUCATION
EEL 4914 Electrical Engineering Design (Senior Design) Final Design Report
 Final Design Report") EEL 4914 Electrical Engineering Design (Senior Design) Final Design Report April 21, 2008 Team Members: Project Title: Human Powered Submarine Control System Team Name: Swamp Thing Name: Charles Shupard
EEL 4914 Electrical Engineering Design (Senior Design) Final Design Report April 21, 2008 Team Members: Project Title: Human Powered Submarine Control System Team Name: Swamp Thing Name: Charles Shupard
Preliminary Design Report. Project Title: Search and Destroy
 EEL 494 Electrical Engineering Design (Senior Design) Preliminary Design Report 9 April 0 Project Title: Search and Destroy Team Member: Name: Robert Bethea Email: bbethea88@ufl.edu Project Abstract Name:
EEL 494 Electrical Engineering Design (Senior Design) Preliminary Design Report 9 April 0 Project Title: Search and Destroy Team Member: Name: Robert Bethea Email: bbethea88@ufl.edu Project Abstract Name:
RUNNYMEDE COLLEGE & TECHTALENTS
 RUNNYMEDE COLLEGE & TECHTALENTS Why teach Scratch? The first programming language as a tool for writing programs. The MIT Media Lab's amazing software for learning to program, Scratch is a visual, drag
RUNNYMEDE COLLEGE & TECHTALENTS Why teach Scratch? The first programming language as a tool for writing programs. The MIT Media Lab's amazing software for learning to program, Scratch is a visual, drag
DREAM BIG ROBOT CHALLENGE. DESIGN CHALLENGE Program a humanoid robot to successfully navigate an obstacle course.
 DREAM BIG Grades 6 8, 9 12 45 90 minutes ROBOT CHALLENGE DESIGN CHALLENGE Program a humanoid robot to successfully navigate an obstacle course. SUPPLIES AND EQUIPMENT Per whole group: Obstacles for obstacle
DREAM BIG Grades 6 8, 9 12 45 90 minutes ROBOT CHALLENGE DESIGN CHALLENGE Program a humanoid robot to successfully navigate an obstacle course. SUPPLIES AND EQUIPMENT Per whole group: Obstacles for obstacle
Performance Analysis of Ultrasonic Mapping Device and Radar
 Volume 118 No. 17 2018, 987-997 ISSN: 1311-8080 (printed version); ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu ijpam.eu Performance Analysis of Ultrasonic Mapping Device and Radar Abhishek
Volume 118 No. 17 2018, 987-997 ISSN: 1311-8080 (printed version); ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu ijpam.eu Performance Analysis of Ultrasonic Mapping Device and Radar Abhishek
Lab 2: Blinkie Lab. Objectives. Materials. Theory
 Lab 2: Blinkie Lab Objectives This lab introduces the Arduino Uno as students will need to use the Arduino to control their final robot. Students will build a basic circuit on their prototyping board and
Lab 2: Blinkie Lab Objectives This lab introduces the Arduino Uno as students will need to use the Arduino to control their final robot. Students will build a basic circuit on their prototyping board and
DC motor control using arduino
 DC motor control using arduino 1) Introduction: First we need to differentiate between DC motor and DC generator and where we can use it in this experiment. What is the main different between the DC-motor,
DC motor control using arduino 1) Introduction: First we need to differentiate between DC motor and DC generator and where we can use it in this experiment. What is the main different between the DC-motor,
UNIVERSIDAD CARLOS III DE MADRID ESCUELA POLITÉCNICA SUPERIOR
 UNIVERSIDAD CARLOS III DE MADRID ESCUELA POLITÉCNICA SUPERIOR TRABAJO DE FIN DE GRADO GRADO EN INGENIERÍA DE SISTEMAS DE COMUNICACIONES CONTROL CENTRALIZADO DE FLOTAS DE ROBOTS CENTRALIZED CONTROL FOR
UNIVERSIDAD CARLOS III DE MADRID ESCUELA POLITÉCNICA SUPERIOR TRABAJO DE FIN DE GRADO GRADO EN INGENIERÍA DE SISTEMAS DE COMUNICACIONES CONTROL CENTRALIZADO DE FLOTAS DE ROBOTS CENTRALIZED CONTROL FOR
ROBOSUB. Isaac Peral y Caballero. Future Vehicles. Entrepreneurs
 ROBOSUB Isaac Peral y Caballero FuVe and FUVE association borns from the desire of innovation and entrepreneurship. Formed by 20 students from different universities and specialties we will work to develop
ROBOSUB Isaac Peral y Caballero FuVe and FUVE association borns from the desire of innovation and entrepreneurship. Formed by 20 students from different universities and specialties we will work to develop
Restoring a Bulle Clock. Restoration of Bulle Clock Serial Number
 Page 1 Restoration of Bulle Clock Serial Number 180859. Page 2 This clock is of the tall type on an ebonised wood base. It sits under a Crystal Glass dome which has not been supplied. The restoration is
Page 1 Restoration of Bulle Clock Serial Number 180859. Page 2 This clock is of the tall type on an ebonised wood base. It sits under a Crystal Glass dome which has not been supplied. The restoration is
FABO ACADEMY X ELECTRONIC DESIGN
 ELECTRONIC DESIGN MAKE A DEVICE WITH INPUT & OUTPUT The Shanghaino can be programmed to use many input and output devices (a motor, a light sensor, etc) uploading an instruction code (a program) to it
ELECTRONIC DESIGN MAKE A DEVICE WITH INPUT & OUTPUT The Shanghaino can be programmed to use many input and output devices (a motor, a light sensor, etc) uploading an instruction code (a program) to it
Undefined Obstacle Avoidance and Path Planning
 Paper ID #6116 Undefined Obstacle Avoidance and Path Planning Prof. Akram Hossain, Purdue University, Calumet (Tech) Akram Hossain is a professor in the department of Engineering Technology and director
Paper ID #6116 Undefined Obstacle Avoidance and Path Planning Prof. Akram Hossain, Purdue University, Calumet (Tech) Akram Hossain is a professor in the department of Engineering Technology and director
ICTCM 28th International Conference on Technology in Collegiate Mathematics
 ARDUINO IN THE CLASSROOM: CLASSROOM READY MODULES FOR UNDERGRADUATE MATHEMATICS Michael D. Seminelli 1 Department of Mathematical Sciences United States Military Academy West Point, NY 10996 Michael.Seminelli@usma.edu
ARDUINO IN THE CLASSROOM: CLASSROOM READY MODULES FOR UNDERGRADUATE MATHEMATICS Michael D. Seminelli 1 Department of Mathematical Sciences United States Military Academy West Point, NY 10996 Michael.Seminelli@usma.edu
UCL Micro:bit Robotics Documentation
 UCL Micro:bit Robotics Documentation Release 0.1 Rae Harbird Sep 25, 2018 Contents 1 Building Your Own Robots 3 2 Contents 5 2.1 Micro:bit - Getting Started........................................ 5 2.2
UCL Micro:bit Robotics Documentation Release 0.1 Rae Harbird Sep 25, 2018 Contents 1 Building Your Own Robots 3 2 Contents 5 2.1 Micro:bit - Getting Started........................................ 5 2.2
ARDUINO BASED CALIBRATION OF AN INERTIAL SENSOR IN VIEW OF A GNSS/IMU INTEGRATION
 Journal of Young Scientist, Volume IV, 2016 ISSN 2344-1283; ISSN CD-ROM 2344-1291; ISSN Online 2344-1305; ISSN-L 2344 1283 ARDUINO BASED CALIBRATION OF AN INERTIAL SENSOR IN VIEW OF A GNSS/IMU INTEGRATION
Journal of Young Scientist, Volume IV, 2016 ISSN 2344-1283; ISSN CD-ROM 2344-1291; ISSN Online 2344-1305; ISSN-L 2344 1283 ARDUINO BASED CALIBRATION OF AN INERTIAL SENSOR IN VIEW OF A GNSS/IMU INTEGRATION
Advanced Mechatronics 1 st Mini Project. Remote Control Car. Jose Antonio De Gracia Gómez, Amartya Barua March, 25 th 2014
 Advanced Mechatronics 1 st Mini Project Remote Control Car Jose Antonio De Gracia Gómez, Amartya Barua March, 25 th 2014 Remote Control Car Manual Control with the remote and direction buttons Automatic
Advanced Mechatronics 1 st Mini Project Remote Control Car Jose Antonio De Gracia Gómez, Amartya Barua March, 25 th 2014 Remote Control Car Manual Control with the remote and direction buttons Automatic
VOICE CONTROL BASED PROSTHETIC HUMAN ARM
 VOICE CONTROL BASED PROSTHETIC HUMAN ARM Ujwal R 1, Rakshith Narun 2, Harshell Surana 3, Naga Surya S 4, Ch Preetham Dheeraj 5 1.2.3.4.5. Student, Department of Electronics and Communication Engineering,
VOICE CONTROL BASED PROSTHETIC HUMAN ARM Ujwal R 1, Rakshith Narun 2, Harshell Surana 3, Naga Surya S 4, Ch Preetham Dheeraj 5 1.2.3.4.5. Student, Department of Electronics and Communication Engineering,
Project 27 Joystick Servo Control
 Project 27 Joystick Servo Control For another simple project, let s use a joystick to control the two servos. You ll arrange the servos in such a way that you get a pan-tilt head, such as is used for CCTV
Project 27 Joystick Servo Control For another simple project, let s use a joystick to control the two servos. You ll arrange the servos in such a way that you get a pan-tilt head, such as is used for CCTV
ESE 350 HEXAWall v 2.0 Michelle Adjangba Omari Maxwell
 ESE 350 HEXAWall v 2.0 Michelle Adjangba Omari Maxwell Abstract This project is a continuation from the HEXA interactive wall display done in ESE 350 last spring. Professor Mangharam wants us to take this
ESE 350 HEXAWall v 2.0 Michelle Adjangba Omari Maxwell Abstract This project is a continuation from the HEXA interactive wall display done in ESE 350 last spring. Professor Mangharam wants us to take this
1. A sinusoidal ac power supply has rms voltage V and supplies rms current I. What is the maximum instantaneous power delivered?
 1. A sinusoidal ac power supply has rms voltage V and supplies rms current I. What is the maximum instantaneous power delivered? A. VI B. VI C. VI D. VI. An alternating current supply of negligible internal
1. A sinusoidal ac power supply has rms voltage V and supplies rms current I. What is the maximum instantaneous power delivered? A. VI B. VI C. VI D. VI. An alternating current supply of negligible internal
A - Debris on the Track
 A - Debris on the Track Rocks have fallen onto the line for the robot to follow, blocking its path. We need to make the program clever enough to not get stuck! 2017 https://www.hamiltonbuhl.com/teacher-resources
A - Debris on the Track Rocks have fallen onto the line for the robot to follow, blocking its path. We need to make the program clever enough to not get stuck! 2017 https://www.hamiltonbuhl.com/teacher-resources
A - Debris on the Track
 A - Debris on the Track Rocks have fallen onto the line for the robot to follow, blocking its path. We need to make the program clever enough to not get stuck! 2018 courses.techcamp.org.uk/ Page 1 of 7
A - Debris on the Track Rocks have fallen onto the line for the robot to follow, blocking its path. We need to make the program clever enough to not get stuck! 2018 courses.techcamp.org.uk/ Page 1 of 7
INSTALLATION INSTRUCTIONS 3 BULL BAR 99-04, 04 "HERITAGE" F-150/250LD 2WD, 97-04, 04 "HERITAGE" 4WD WD EXPEDITION/ WD EXPEDITION PART
 INSTALLATION INSTRUCTIONS 3 BULL BAR PART #B-F1971;B-F2971 PARTS LIST: 1 Bull Bar 2 12-1.75mm x 130mm x 40mm Hex Bolts 1 Driver/Left Mounting Bracket 4 12-1.75mm x 35mm Hex Bolts 1 Passenger/Right Mounting
INSTALLATION INSTRUCTIONS 3 BULL BAR PART #B-F1971;B-F2971 PARTS LIST: 1 Bull Bar 2 12-1.75mm x 130mm x 40mm Hex Bolts 1 Driver/Left Mounting Bracket 4 12-1.75mm x 35mm Hex Bolts 1 Passenger/Right Mounting
M2 Antenna Systems, Inc. Model No: 2M4
 M2 Antenna Systems, Inc. Model No: 2M4 SPECIFICATIONS: Model... 2M4 Frequency Range... 144 To 148 MHz *Gain... 9.6 dbi Front to back... 20 db Typical Beamwidth... E=54 H=74 Feed type... T Match Feed Impedance....
M2 Antenna Systems, Inc. Model No: 2M4 SPECIFICATIONS: Model... 2M4 Frequency Range... 144 To 148 MHz *Gain... 9.6 dbi Front to back... 20 db Typical Beamwidth... E=54 H=74 Feed type... T Match Feed Impedance....
MECHATRONICS IN A BOX
 MECHATRONICS IN A BOX A Complete Mechatronics Solution for the Classroom amtekcompany.com Contents Introduction Programming Arduino microcontrollers Motor Control Training Course Flowcode 8 Formula AllCode
MECHATRONICS IN A BOX A Complete Mechatronics Solution for the Classroom amtekcompany.com Contents Introduction Programming Arduino microcontrollers Motor Control Training Course Flowcode 8 Formula AllCode
Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators
 Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators Ahmed Okasha, Assistant Lecturer okasha1st@gmail.com Objective Have a
Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators Ahmed Okasha, Assistant Lecturer okasha1st@gmail.com Objective Have a
Implement a Robot for the Trinity College Fire Fighting Robot Competition.
 Alan Kilian Fall 2011 Implement a Robot for the Trinity College Fire Fighting Robot Competition. Page 1 Introduction: The successful completion of an individualized degree in Mechatronics requires an understanding
Alan Kilian Fall 2011 Implement a Robot for the Trinity College Fire Fighting Robot Competition. Page 1 Introduction: The successful completion of an individualized degree in Mechatronics requires an understanding
INSTANT ROBOT SHIELD (AXE408)
") INSTANT ROBOT SHIELD (AXE408) 1.0 Introduction Thank you for purchasing this Instant Robot shield. This datasheet is designed to give a brief introduction to how the shield is assembled, used and configured.
INSTANT ROBOT SHIELD (AXE408) 1.0 Introduction Thank you for purchasing this Instant Robot shield. This datasheet is designed to give a brief introduction to how the shield is assembled, used and configured.
A - Debris on the Track
 A - Debris on the Track Rocks have fallen onto the line for the robot to follow, blocking its path. We need to make the program clever enough to not get stuck! Step 1 2017 courses.techcamp.org.uk/ Page
A - Debris on the Track Rocks have fallen onto the line for the robot to follow, blocking its path. We need to make the program clever enough to not get stuck! Step 1 2017 courses.techcamp.org.uk/ Page
1 Introduction. 2 Embedded Electronics Primer. 2.1 The Arduino
 Beginning Embedded Electronics for Botballers Using the Arduino Matthew Thompson Allen D. Nease High School matthewbot@gmail.com 1 Introduction Robotics is a unique and multidisciplinary field, where successful
Beginning Embedded Electronics for Botballers Using the Arduino Matthew Thompson Allen D. Nease High School matthewbot@gmail.com 1 Introduction Robotics is a unique and multidisciplinary field, where successful
Cytrobyte ROV Technical Report Cytrobyte Group, Houston TX
 2012 Cytrobyte ROV Technical Report Cytrobyte Group, Houston TX Reidar Eliassen Mentor Julian Yao Mentor Team Members Tian Yao CEO; Waterproofing and Main Electronics Engineer Tim Flichy Public Relations;
2012 Cytrobyte ROV Technical Report Cytrobyte Group, Houston TX Reidar Eliassen Mentor Julian Yao Mentor Team Members Tian Yao CEO; Waterproofing and Main Electronics Engineer Tim Flichy Public Relations;
ROV Ranger Class Technical Report. High Technology High School Presents:
 ROV Ranger Class Technical Report High Technology High School Presents: GLADT-Good Luck and Duct Tape Teachers: Mr. Robert Dennis and Mr. Michael T. Roche Mentor: Mr. Bill Wetzel Andrew Shum Alex Jagendorf
ROV Ranger Class Technical Report High Technology High School Presents: GLADT-Good Luck and Duct Tape Teachers: Mr. Robert Dennis and Mr. Michael T. Roche Mentor: Mr. Bill Wetzel Andrew Shum Alex Jagendorf
Citrus Circuits Fall Workshop Series. Roborio and Sensors. Paul Ngo and Ellie Hass
 Citrus Circuits Fall Workshop Series Roborio and Sensors Paul Ngo and Ellie Hass Introduction to Sensors Sensor: a device that detects or measures a physical property and records, indicates, or otherwise
Citrus Circuits Fall Workshop Series Roborio and Sensors Paul Ngo and Ellie Hass Introduction to Sensors Sensor: a device that detects or measures a physical property and records, indicates, or otherwise
MAKEVMA502 BASIC DIY KIT WITH ATMEGA2560 FOR ARDUINO USER MANUAL
 BASIC DIY KIT WITH ATMEGA2560 FOR ARDUINO USER MANUAL USER MANUAL 1. Introduction To all residents of the European Union Important environmental information about this product This symbol on the device
BASIC DIY KIT WITH ATMEGA2560 FOR ARDUINO USER MANUAL USER MANUAL 1. Introduction To all residents of the European Union Important environmental information about this product This symbol on the device
Budget Robotics Octabot Assembly Instructions
 Budget Robotics Octabot Assembly Instructions The Budget Robotics Octabot kit is a low-cost 7" diameter servo-driven robot base, ready for expansion. Assembly is simple, and takes less than 15 minutes.
Budget Robotics Octabot Assembly Instructions The Budget Robotics Octabot kit is a low-cost 7" diameter servo-driven robot base, ready for expansion. Assembly is simple, and takes less than 15 minutes.
VOICE CONTROLLED ROBOT WITH REAL TIME BARRIER DETECTION AND AVERTING
 VOICE CONTROLLED ROBOT WITH REAL TIME BARRIER DETECTION AND AVERTING P.NARENDRA ILAYA PALLAVAN 1, S.HARISH 2, C.DHACHINAMOORTHI 3 1Assistant Professor, EIE Department, Bannari Amman Institute of Technology,
VOICE CONTROLLED ROBOT WITH REAL TIME BARRIER DETECTION AND AVERTING P.NARENDRA ILAYA PALLAVAN 1, S.HARISH 2, C.DHACHINAMOORTHI 3 1Assistant Professor, EIE Department, Bannari Amman Institute of Technology,
Robot Jousting. A two-player interactive jousting game involving wheeled robots. Alexander Cruz, En Lei, Sunil Srinivasan, Darrel Weng
 Robot Jousting A two-player interactive jousting game involving wheeled robots Alexander Cruz, En Lei, Sunil Srinivasan, Darrel Weng Project Goal Create a physical, interactive jousting game using wheeled
Robot Jousting A two-player interactive jousting game involving wheeled robots Alexander Cruz, En Lei, Sunil Srinivasan, Darrel Weng Project Goal Create a physical, interactive jousting game using wheeled
Accelerometer Products
 Accelerometer Products What Is an Accelerometer and When Do You Use One? An accelerometer is a sensor which converts an acceleration from motion or gravity to an electrical signal. MOTION INPUT 5% 5% Tilt
Accelerometer Products What Is an Accelerometer and When Do You Use One? An accelerometer is a sensor which converts an acceleration from motion or gravity to an electrical signal. MOTION INPUT 5% 5% Tilt
Development of a MATLAB Data Acquisition and Control Toolbox for BASIC Stamp Microcontrollers
 Chapter 4 Development of a MATLAB Data Acquisition and Control Toolbox for BASIC Stamp Microcontrollers 4.1. Introduction Data acquisition and control boards, also known as DAC boards, are used in virtually
Chapter 4 Development of a MATLAB Data Acquisition and Control Toolbox for BASIC Stamp Microcontrollers 4.1. Introduction Data acquisition and control boards, also known as DAC boards, are used in virtually
Programming of Embedded Systems Uppsala University Spring 2014 Summary of Pan and Tilt project
 Programming of Embedded Systems Uppsala University Spring 2014 Summary of Pan and Tilt project Björn Forsberg Martin Hagelin Paul Norstöm Maksim Olifer May 28, 2014 1 Introduction The goal of the project
Programming of Embedded Systems Uppsala University Spring 2014 Summary of Pan and Tilt project Björn Forsberg Martin Hagelin Paul Norstöm Maksim Olifer May 28, 2014 1 Introduction The goal of the project
Running the PR2. Chapter Getting set up Out of the box Batteries and power
 Chapter 5 Running the PR2 Running the PR2 requires a basic understanding of ROS (http://www.ros.org), the BSD-licensed Robot Operating System. A ROS system consists of multiple processes running on multiple
Chapter 5 Running the PR2 Running the PR2 requires a basic understanding of ROS (http://www.ros.org), the BSD-licensed Robot Operating System. A ROS system consists of multiple processes running on multiple
Internet of Things Student STEM Project Jackson High School. Lesson 3: Arduino Solar Tracker
 Internet of Things Student STEM Project Jackson High School Lesson 3: Arduino Solar Tracker Lesson 3 Arduino Solar Tracker Time to complete Lesson 60-minute class period Learning objectives Students learn
Internet of Things Student STEM Project Jackson High School Lesson 3: Arduino Solar Tracker Lesson 3 Arduino Solar Tracker Time to complete Lesson 60-minute class period Learning objectives Students learn
Technical. Report. Underwater Rescue Research Company. Rescue Robot Team: Marine Advance Technology Education May 22, 2013
 Rescue Robot Team: Technical Elizabeth Thomson: (Seventh Grade) CEO and Safety Officer Breanna Domrase (Seventh Grade) Payload Specialist Nathan Cosbitt (Seventh Grade) Pilot Sam Beatty (Seventh Grade)
Rescue Robot Team: Technical Elizabeth Thomson: (Seventh Grade) CEO and Safety Officer Breanna Domrase (Seventh Grade) Payload Specialist Nathan Cosbitt (Seventh Grade) Pilot Sam Beatty (Seventh Grade)
Enhanced SmartDrive40 MDS40B
 Enhanced SmartDrive40 MDS40B User's Manual Rev 1.0 December 2015 Created by Cytron Technologies Sdn. Bhd. All Rights Reserved 1 INDEX 1. Introduction 3 2. Packing List 4 3. Product Specifications 5 4.
Enhanced SmartDrive40 MDS40B User's Manual Rev 1.0 December 2015 Created by Cytron Technologies Sdn. Bhd. All Rights Reserved 1 INDEX 1. Introduction 3 2. Packing List 4 3. Product Specifications 5 4.
Study of M.A.R.S. (Multifunctional Aero-drone for Remote Surveillance)
") Study of M.A.R.S. (Multifunctional Aero-drone for Remote Surveillance) Supriya Bhuran 1, Rohit V. Agrawal 2, Kiran D. Bombe 2, Somiran T. Karmakar 2, Ninad V. Bapat 2 1 Assistant Professor, Dept. Instrumentation,
Study of M.A.R.S. (Multifunctional Aero-drone for Remote Surveillance) Supriya Bhuran 1, Rohit V. Agrawal 2, Kiran D. Bombe 2, Somiran T. Karmakar 2, Ninad V. Bapat 2 1 Assistant Professor, Dept. Instrumentation,
Hobby Servo Tutorial. Introduction. Sparkfun: https://learn.sparkfun.com/tutorials/hobby-servo-tutorial
 Hobby Servo Tutorial Sparkfun: https://learn.sparkfun.com/tutorials/hobby-servo-tutorial Introduction Servo motors are an easy way to add motion to your electronics projects. Originally used in remotecontrolled
Hobby Servo Tutorial Sparkfun: https://learn.sparkfun.com/tutorials/hobby-servo-tutorial Introduction Servo motors are an easy way to add motion to your electronics projects. Originally used in remotecontrolled
ROVs in a Bucket Building an Underwater Robot. 5.0 Building the Tether
 5.0 A professional ROV is connected to the controller box by strands of wire. The bundle of wires are encased in a single sheath. The connecting wire is called the tether. In our project the tether is
5.0 A professional ROV is connected to the controller box by strands of wire. The bundle of wires are encased in a single sheath. The connecting wire is called the tether. In our project the tether is
Navigation and Thrust System for AUVSI RoboBoat
 Navigation and Thrust System for AUVSI RoboBoat Authors: Michael S. Barnes, Evan J. Dinelli, Dan R. Van de Water Advisor: Dr. Gary Dempsey Client: Mr. Nick Schmidt Department of Electrical and Computer
Navigation and Thrust System for AUVSI RoboBoat Authors: Michael S. Barnes, Evan J. Dinelli, Dan R. Van de Water Advisor: Dr. Gary Dempsey Client: Mr. Nick Schmidt Department of Electrical and Computer
Internet of Things Student STEM Project Jackson High School. Lesson 2: Arduino and LED
 Internet of Things Student STEM Project Jackson High School Lesson 2: Arduino and LED Lesson 2: Arduino and LED Time to complete Lesson 60-minute class period Learning objectives Students learn about Arduino
Internet of Things Student STEM Project Jackson High School Lesson 2: Arduino and LED Lesson 2: Arduino and LED Time to complete Lesson 60-minute class period Learning objectives Students learn about Arduino
HAND GESTURE CONTROLLED ROBOT USING ARDUINO
 HAND GESTURE CONTROLLED ROBOT USING ARDUINO Vrushab Sakpal 1, Omkar Patil 2, Sagar Bhagat 3, Badar Shaikh 4, Prof.Poonam Patil 5 1,2,3,4,5 Department of Instrumentation Bharati Vidyapeeth C.O.E,Kharghar,Navi
HAND GESTURE CONTROLLED ROBOT USING ARDUINO Vrushab Sakpal 1, Omkar Patil 2, Sagar Bhagat 3, Badar Shaikh 4, Prof.Poonam Patil 5 1,2,3,4,5 Department of Instrumentation Bharati Vidyapeeth C.O.E,Kharghar,Navi
BOAT LOCALIZATION AND WARNING SYSTEM FOR BORDER IDENTIFICATION
 BOAT LOCALIZATION AND WARNING SYSTEM FOR BORDER IDENTIFICATION Mr.Vasudevan, Ms.Aarthi.C, Ms.Arunthathi.M, Ms.Durgakalaimathi.L.T, Ms.Evangelin Darvia.P 1Professor, Dept. of ECE, Panimalar Engineering
BOAT LOCALIZATION AND WARNING SYSTEM FOR BORDER IDENTIFICATION Mr.Vasudevan, Ms.Aarthi.C, Ms.Arunthathi.M, Ms.Durgakalaimathi.L.T, Ms.Evangelin Darvia.P 1Professor, Dept. of ECE, Panimalar Engineering
Arduino An Introduction
 Arduino An Introduction Hardware and Programming Presented by Madu Suthanan, P. Eng., FEC. Volunteer, Former Chair (2013-14) PEO Scarborough Chapter 2 Arduino for Mechatronics 2017 This note is for those
Arduino An Introduction Hardware and Programming Presented by Madu Suthanan, P. Eng., FEC. Volunteer, Former Chair (2013-14) PEO Scarborough Chapter 2 Arduino for Mechatronics 2017 This note is for those
Educating potential engineers about marine conservation
 Educating potential engineers about marine conservation Robin Bradbeer Director, Hoi Ha Wan Marine Science and Engineering Laboratory, Department of Electronic Engineering, City University of Hong Kong,
Educating potential engineers about marine conservation Robin Bradbeer Director, Hoi Ha Wan Marine Science and Engineering Laboratory, Department of Electronic Engineering, City University of Hong Kong,
ROBOTIC ARM FOR OBJECT SORTING BASED ON COLOR
 ROBOTIC ARM FOR OBJECT SORTING BASED ON COLOR ASRA ANJUM 1, Y. ARUNA SUHASINI DEVI 2 1 Asra Anjum, M.Tech Student, Dept Of ECE, CMR College Of Engg And Tech, Kandlakoya, Medchal, Telangana, India. 2 Y.
ROBOTIC ARM FOR OBJECT SORTING BASED ON COLOR ASRA ANJUM 1, Y. ARUNA SUHASINI DEVI 2 1 Asra Anjum, M.Tech Student, Dept Of ECE, CMR College Of Engg And Tech, Kandlakoya, Medchal, Telangana, India. 2 Y.
3D ULTRASONIC STICK FOR BLIND
 3D ULTRASONIC STICK FOR BLIND Osama Bader AL-Barrm Department of Electronics and Computer Engineering Caledonian College of Engineering, Muscat, Sultanate of Oman Email: Osama09232@cceoman.net Abstract.
3D ULTRASONIC STICK FOR BLIND Osama Bader AL-Barrm Department of Electronics and Computer Engineering Caledonian College of Engineering, Muscat, Sultanate of Oman Email: Osama09232@cceoman.net Abstract.
Engtek SubSea Systems
 Engtek SubSea Systems A Division of Engtek Manoeuvra Systems Pte Ltd SubSea Propulsion Technology AUV Propulsion and Maneuvering Modules Engtek SubSea Systems A Division of Engtek Manoeuvra Systems Pte
Engtek SubSea Systems A Division of Engtek Manoeuvra Systems Pte Ltd SubSea Propulsion Technology AUV Propulsion and Maneuvering Modules Engtek SubSea Systems A Division of Engtek Manoeuvra Systems Pte
Some prior experience with building programs in Scratch is assumed. You can find some introductory materials here:
 Robotics 1b Building an mbot Program Some prior experience with building programs in Scratch is assumed. You can find some introductory materials here: http://www.mblock.cc/edu/ The mbot Blocks The mbot
Robotics 1b Building an mbot Program Some prior experience with building programs in Scratch is assumed. You can find some introductory materials here: http://www.mblock.cc/edu/ The mbot Blocks The mbot
Magnetic Loop Antenna - Top Bands
 Magnetic Loop Antenna - Top Bands Instruction Manual Thank you for purchasing this new product small Magnetic Loop Antenna Top Bands. Manual contains important information. Please read all instructions
Magnetic Loop Antenna - Top Bands Instruction Manual Thank you for purchasing this new product small Magnetic Loop Antenna Top Bands. Manual contains important information. Please read all instructions
B RoboClaw 2 Channel 30A Motor Controller Data Sheet
 B0098 - RoboClaw 2 Channel 30A Motor Controller (c) 2010 BasicMicro. All Rights Reserved. Feature Overview: 2 Channel at 30Amp, Peak 60Amp Battery Elimination Circuit (BEC) Switching Mode BEC Hobby RC
B0098 - RoboClaw 2 Channel 30A Motor Controller (c) 2010 BasicMicro. All Rights Reserved. Feature Overview: 2 Channel at 30Amp, Peak 60Amp Battery Elimination Circuit (BEC) Switching Mode BEC Hobby RC
Internet of Things (Winter Training Program) 6 Weeks/45 Days
 6 Weeks/45 Days") (Winter Training Program) 6 Weeks/45 Days PRESENTED BY RoboSpecies Technologies Pvt. Ltd. Office: W-53g, Sec- 11, Noida, UP Contact us: Email: stp@robospecies.com Website: www.robospecies.com Office: +91-120-4245860
(Winter Training Program) 6 Weeks/45 Days PRESENTED BY RoboSpecies Technologies Pvt. Ltd. Office: W-53g, Sec- 11, Noida, UP Contact us: Email: stp@robospecies.com Website: www.robospecies.com Office: +91-120-4245860
MOBILE ROBOT LOCALIZATION with POSITION CONTROL
 T.C. DOKUZ EYLÜL UNIVERSITY ENGINEERING FACULTY ELECTRICAL & ELECTRONICS ENGINEERING DEPARTMENT MOBILE ROBOT LOCALIZATION with POSITION CONTROL Project Report by Ayhan ŞAVKLIYILDIZ - 2011502093 Burcu YELİS
T.C. DOKUZ EYLÜL UNIVERSITY ENGINEERING FACULTY ELECTRICAL & ELECTRONICS ENGINEERING DEPARTMENT MOBILE ROBOT LOCALIZATION with POSITION CONTROL Project Report by Ayhan ŞAVKLIYILDIZ - 2011502093 Burcu YELİS
AUTOMATIC ELECTRICITY METER READING AND REPORTING SYSTEM
 AUTOMATIC ELECTRICITY METER READING AND REPORTING SYSTEM Faris Shahin, Lina Dajani, Belal Sababha King Abdullah II Faculty of Engineeing, Princess Sumaya University for Technology, Amman 11941, Jordan
AUTOMATIC ELECTRICITY METER READING AND REPORTING SYSTEM Faris Shahin, Lina Dajani, Belal Sababha King Abdullah II Faculty of Engineeing, Princess Sumaya University for Technology, Amman 11941, Jordan
Installation & User Manual Radio Remote RCS-10E
 Installation & User Manual Radio Remote RCS-10E SLEIPNER MOTOR AS P.O. Box 519 N-1612 Fredrikstad Norway Tel: +47 69 30 00 60 Fax: +47 69 30 00 70 www.side-power.com sidepower@sleipner.no Made in Norway
Installation & User Manual Radio Remote RCS-10E SLEIPNER MOTOR AS P.O. Box 519 N-1612 Fredrikstad Norway Tel: +47 69 30 00 60 Fax: +47 69 30 00 70 www.side-power.com sidepower@sleipner.no Made in Norway