Robotics: Science and Systems
|
|
|
- Camron Murphy
- 6 years ago
- Views:
Transcription
1 Robotics: Science and Systems Overview of Robotics Zhibin (Alex) Li School of Informatics University of Edinburgh
2 Outline Definition: what are robots? Elements of robotics Mechanism & mechanical design Actuation Sensing Motion capabilities: manipulation, locomotion & localization Artificial Intelligence (AI) Level of robot intelligence Areas of robotics Industrial/civil applications Educational purposes Research directions Robot control Summary of key RSS elements Robotics in real-world application: a field test 2
3 Key elements of RSS Basic robotics knowledge (property of the system): 1. Robot Kinematics & Dynamics Process of information: 2. System Identification & State Estimation 3. Kalman Filter Mobile robots: 4. Localization and Mapping 5. Path & Motion Planning 3
4 Key elements of RSS Planning of articulated robots: 1. Trajectory Planning and Motion Planning Control: Digital System & Control Design of Advanced Controllers Optimization Model Predictive Control Machine learning: 6. Machine Learning for Robot Control 4
5 What are robots? 5
6 Robotics An interdisciplinary area of science & engineering that covers: mechanical engineering, electrical engineering, computer science, and AI. The word robot was introduced to the public by Czech writer Karel Čapek in his play R.U.R. (Rossum's Universal Robots) in In Czech, the same as other Slavic languages, robota means labour or work. Original purpose of robots, automatic/autonomous labour that frees humans from tedious jobs. 6


7 Rossum's Universal Robots Edward Alderton Theatre, image by Kevin Coward R.U.R. - Wikipedia 7

8 Robotics Robotics is the science & technology that deals with a variety of elements related with developing such machines or mechatronic devices, eg design & fabrication of the hardware, sensing & controls, and the applications. 8

9 Eric: UK's first robot UK s first robot, and most interestingly, it is a humanoid robot. Built in 1928 by Captain Richards & A.H. Reffell See more at: 9

10 Robots: machines that automate some behavior The first industrial robot: Unimate George Charles Devol developed the prototype of Unimate in 1950s, the first material handling robot employed in industrial production work. The first Unimate robot was sold to General Motors in Unimate Robot, the history channel 10

11 Robots: machines that automate some behavior High-speed motion control Robot Kinematics & Dynamics System Identification Kalman Filter Digital System & control Design of Advanced Controllers Trajectory Planning and Motion Planning ABB Robotics 11

12 Robots: machines that automate some behavior Sorting parcels in warehouse application Digital System & control Localization and Mapping Path & Motion Planning 12


13 Robots: machines that automate some behavior Spot-mini and Handle robots from Boston Dynamics 13

14 Robots: machines that automate some behavior Ocean one, Stanford University 14

15 Robots: machines that automate some behavior Related RSS elements: Robot Kinematics & Dynamics System Identification & State Estimation Kalman Filter Digital System & control Design of Advanced Controllers Optimization Model Predictive Control Trajectory Planning and Motion Planning Valkyrie Robot, University of Edinburgh 15
16 Mechanism & mechanical design 16

17 Design of humanoid robots Honda Asimo robots 17

18 Design of humanoid robots HRP robots Robots are getting lighter and stronger 18

19 Biomimetic robot Festo robot 19
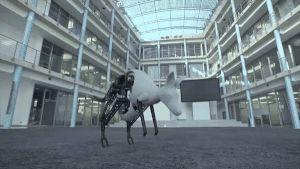
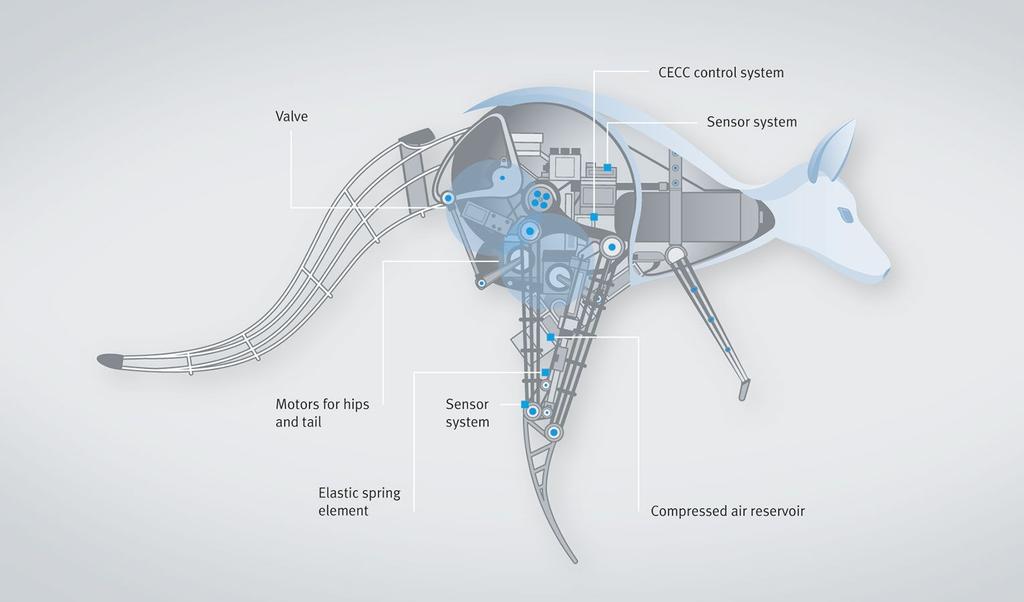
20 Biomimetic robot 20


21 Biomimetic robot Biomimetics and Dexterous Manipulation Lab, Stanford 21

22 Smart mechanism Metamorphic robots kings, see video From Prof. Jian S. Dai, King's College London: 22
23 Design of energy-efficient robotic legs Smart design of using soft elements for strong energy. W. Roozing, Z. Li, G. A. Medrano-Cerda, D. G. Caldwell and N. G. Tsagarakis, "Development and Control of a Compliant Asymmetric Antagonistic Actuator for Energy Efficient Mobility," in IEEE/ASME Transactions on Mechatronics, vol. 21, no. 2, pp , April


24 Smart mechanism: ostrich runner Related field/knowledge: Newtonian & Solid Mechanics, Rigid body dynamics (momentum, force acting on rigid body, kinetic & potential energy). Book: Featherstone, Roy. Rigid body dynamics algorithms. Springer, Articles: IEEE/ASME Transactions on Mechatronics. 24
25 Related RSS elements The mechanical design of these systems are not the scope of RSS, however, controlling them involves: Robot Kinematics & Dynamics Kalman Filter Digital System & control Design of Advanced Controllers Optimization Trajectory Planning and Motion Planning 25
26 Actuation 26

27 High-power actuators Actuator of the previous example: torque control, high power 27
28 Soft actuators Variable impedance by active control Different variable damping actuator principles: (a) friction, (b) MR, (c) variable orifice fluid damper. Vanderborght, Bram, et al. "Variable impedance actuators: A review." Robotics and autonomous systems (2013):
29 Sensing 29



30 Torque sensors Force/torque sensing 6-axis FT sensor typically mounted on the end-effector 2017 ATI Industrial Automation, Inc. 30



31 Position sensors Absolution position sensors Mechanical absolute encoders Optical absolute encoders (13 tracks) Schematics of optical absolute encoders (3 tracks) 31


32 Position sensors Relative position sensors, usually have higher resolutions. 32
33 Motion capabilities: manipulation, locomotion & localization 33

34 Motion capabilities: manipulation Retrieving an object in a clustered environment. Yiming Yang et al., HDRM: A Resolution Complete Dynamic Roadmap for Real-Time Motion Planning in Complex Environments,

35 Motion capabilities: manipulation Bipedal walking in presence of external pushes Related field/knowledge: Kinematics, Collision-avoidance motion planning, Rigid body dynamics. Book: Featherstone, Roy. Rigid body dynamics algorithms. Springer, Articles: IEEE Transactions on Robotics; IEEE International Conference on Robotics and Automation (ICRA), etc. 35

36 Motion capabilities: localization 36
37 Related RSS elements in these systems Robot Kinematics & Dynamics Localization and Mapping Path & Motion Planning Kalman Filter Digital System & control Design of Advanced Controllers Optimization Model Predictive Control Trajectory Planning and Motion Planning 37
38 Artificial Intelligence (AI) 38


39 Ideas of AI In the 1940s and 50s, a lot of discussion was held by scientists from different fields on the possibility of creating an artificial brain. Can machines think? In 1950, Alan Turing proposed Turing Test: a human judge engages in a natural language conversation with a human and a machine designed to generate performance indistinguishable from that of a human being. 39
40 Turing Test A natural language conversation, is that a human or a machine? 40
41 The Dartmouth workshop In 1956, a summer workshop for artificial intelligence, named the Dartmouth Summer Research Project on Artificial Intelligence open a new field of AI. In John McCarthy s proposal, he stated that the conference was "to proceed on the basis of the conjecture that every aspect of learning or any other feature of intelligence can in principle be so precisely described that a machine can be made to simulate it." Archive of Dartmouth workshop: 41
42 The Dartmouth workshop The Proposal states: We propose that a 2 month, 10 man study of artificial intelligence be carried out during the summer of 1956 at Dartmouth College in Hanover, New Hampshire. The study is to proceed... We think that a significant advance can be made in one or more of these problems if a carefully selected group of scientists work on it together for a summer. 1956, birth of the field of artificial intelligence (AI) research. Original proposal: 42



43 Golden age of AI Development of humanoid robot occurred in this golden age. Waseda University, Japan, initiated the WABOT project in 1967, and in 1972 completed the WABOT-1, the world's first full-scale intelligent humanoid robot. WL WABOT-1, 1973 WABIAN-2R,

44 AI winter AI, cannot be exempted from the hype cycle for new technology. Menzies, Tim. "21st-century ai: Proud, not smug." IEEE Intelligent Systems 18.3 (2003):


45 New era of deep learning, 2012 In 2012, Deep Convolutional Neural Networks won the large-scale ImageNet competition by a significant margin over shallow machine learning methods. Deep learning: more hidden layers, which enable composition of features from lower layers, potentially modeling complex data with fewer units than a similarly performing shallow network. 45

46 New era of deep learning, , DeepMind developed Deep Q-learning capable of learning how to play Atari video games using only pixels as data input. [video] 46


47 Alpha-Go vs Lee Sedol, 2016 AlphaGo is a narrow AI specialized in playing the board game Go. 47


48 Alpha-Go vs Lee Sedol, 2016 What AI and robotics still cannot do? Can you see it? Reliable control of physical interaction is hard in a real world. 48
49 Machine learning for solving robotics problems Balance control of humanoid robot Related RSS elements: Machine Learning for Robot Control Credits: Chuanyu Yang, PhD student, University of Edinburgh 49

50 Machine learning for solving robotics problems Solving Bipedal-Walker challenge in OpenAI gym. Related RSS elements: Machine Learning for Robot Control Credits: Doo Re Song Msc thesis,school of Informatics; Chuanyu Yang, PhD student, University of Edinburgh 50
51 Level of robot intelligence 51
52 Robot intelligence Level 5 Human intelligence level Level 4 Task-level programming Level 3 Structured programming Level 2 Motion primitive programming Level 1 Point to point programming 52
53 Areas of robotics 53
54 Diversity of categorization By applications/services: welding, warehouse, cleaning, robots By particular (actuation) technology: hydraulic, pneumatic robots By the environment of the applications: aerial, aquatic, ground, space, underwater robots By morphologies: robot arms, humanoid, insect (bio-inspired) robots By features of functionality: wheeled, legged robots. There are usually multiple ways of defining the type of robots. 54
55 Robots in industry YASKAWA: motoman.com FANUC: fanuc.eu/uk/en/robots Kawasaki Robotics: robotics.kawasaki.com ABB: new.abb.com/products/robotics KUKA: kuka.com Schunk: schunk.com/be_en/homepage Universal Robots: universal-robots.com 55






56 Industrial robots YASKAWA ABB Fanuc Schunk KUKA UR 56

57 Car assembly in Tesla Picture source: pinterest.com 57

58 Robots in education RSS practical: student-built lego robot that navigates. 58

59 Robots in research Valkyrie Edinburgh Centre for Robotics, University of Edinburgh 59
60 Robot Control 60
61 Robotics research Historically, robotics strongly involves the realization of physical motions, and most robots are essentially motion systems ( robota labour). Therefore, the majority of robotics research focuses on: 1. Sensors 2. Actuators 3. Control Particularly, as sensing and actuation problems are being solved gradually, more effort is made towards control, or more precisely speaking, autonomy. Automation Autonomy Intelligence 61
62 Concept of control What is control? 1. Apply action or influence to achieve an expected outcome. 2. It needs to apply actions, an actuation or an agent. 3. It needs sensor feedback, a probe, if a feedback control system. Generally, control (feedback control) is about reasoning about how to apply actions given the feedback information in order to achieve a goal. 62
63 Control systems The 5 levels of robot intelligence are about how to control a robotic system. Three levels of control: 1. Servo/tracking control (SISO, MIMO) 2. Optimization, optimal control 3. Machine learning The first two are model-based approaches, where knowledge of mechanics and physics is required. Knowledge is given a priori, computationally cheap. Machine learning is a model-free approach, it learns the model through data in a statistical manner. Model is built by big data, computationally expensive. 63


64 Open-loop control Examples: Traffic light system, only the request is the input, the rest is pre-programmed regardless of the situation; Fountain; Or your washing machine; 64
65 Closed-loop control Closed-loop (feedback) control: monitors feedback, uses the deviation signal to control the action so as to reduce the deviation to zero. Note: closed-loop (feedback) control, closed-loop and feedback are mutually exchangeable words. 65

66 Closed-loop control Closed-loop (feedback) control uses negative feedback. A centrifugal governor is a good example of a mechanical controller. Invented in 1788 by James Watt to control the steam engine. 66
67 Robot control Three levels of control: 1. Servo/tracking control 2. Optimization, optimal control 3. Machine learning Typically featured by stable, robust, and dynamic motions Typically featured by a diversity of intelligent behaviors Human intelligence level Task-level programming Structured programming Motion primitive programming Point to point programming In many cases, as shown before, robot control attempts to exploit kinematics and dynamics of the system. 67

68 Why kinematics matter? Explore all configurations, maximize or validate reachability. 68
")

69 Why dynamics matter? Can an object (ρ >0) stay above the water? Stone skipping 69


70 Why dynamics matter? Tasks and performance that can only be achieved by dynamic motions 70


71 Why behaviors matter? Most robotic applications are particularly programmed for solving specific problems. However, what if we want more universal or versatile machines? 71

72 Why behaviors matter? Human intervention supervision. 72

73 Why behaviors matter? Human intervention supervision. University of Bonn, Autonomous Intelligent Systems 73

74 Roadmap for robotics 74
75 Summary of key RSS elements Robot Kinematics & Dynamics J. J. Craig, Introduction to Robotics: Mechanics and Control State Estimation & Kalman Filter Peter Corke, Robotics, Vision and Control, Springer-Verlag. Localization and Mapping H. Choset, K.M. Lynch, S. Hutchinson, G. Kantor, Principles of Robot Motion: Theory, Algorithms, and Implementations. Path & Motion Planning (mobile) S. Thrun, W. Burgard and D. Fox, Probabilistic Robotics. Peter Corke, Robotics, Vision and Control, Springer-Verlag. 75
76 Summary of key RSS elements Trajectory Planning and Motion Planning (articulated) Siciliano, B., et al., Robotics: Modelling, Planning and Control. Digital System & Control Peter Corke, Robotics, Vision and Control, Springer-Verlag. Design of Advanced Controllers Franklin, Gene F., et al., Feedback control of dynamic systems. Optimization Yoshihiko Nakamura, Advanced Robotics: Redundancy and Optimization. Model Predictive Control J.M. Maciejowski, Predictive control : with constraints. Machine Learning for Robot Control Ian Goodfellow, et al., Deep Learning. 76


77 Robotics, making a better world Field test of robots in a post-earthquake scenario, video. 77
Robotics: Science and Systems
 Robotics: Science and Systems Introduction & Overview of Robotics Zhibin (Alex) Li School of Informatics University of Edinburgh Introduction to RSS 2 Lectures Course lecturer: Dr. Zhibin (Alex) LI - Planning,
Robotics: Science and Systems Introduction & Overview of Robotics Zhibin (Alex) Li School of Informatics University of Edinburgh Introduction to RSS 2 Lectures Course lecturer: Dr. Zhibin (Alex) LI - Planning,
ROBOTICS ENG YOUSEF A. SHATNAWI INTRODUCTION
 ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
Robotics. Lecturer: Dr. Saeed Shiry Ghidary
 Robotics Lecturer: Dr. Saeed Shiry Ghidary Email: autrobotics@yahoo.com Outline of Course We will study fundamental algorithms for robotics with: Introduction to industrial robots and Particular emphasis
Robotics Lecturer: Dr. Saeed Shiry Ghidary Email: autrobotics@yahoo.com Outline of Course We will study fundamental algorithms for robotics with: Introduction to industrial robots and Particular emphasis
Robot Motion Control and Planning
 Robot Motion Control and Planning http://www.cs.bilkent.edu.tr/~saranli/courses/cs548 Lecture 1 Introduction and Logistics Uluç Saranlı http://www.cs.bilkent.edu.tr/~saranli CS548 - Robot Motion Control
Robot Motion Control and Planning http://www.cs.bilkent.edu.tr/~saranli/courses/cs548 Lecture 1 Introduction and Logistics Uluç Saranlı http://www.cs.bilkent.edu.tr/~saranli CS548 - Robot Motion Control
CS494/594: Software for Intelligent Robotics
 CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
Introduction to Robotics
 Introduction to Robotics Jee-Hwan Ryu School of Mechanical Engineering Korea University of Technology and Education What is Robot? Robots in our Imagination What is Robot Like in Our Real Life? Origin
Introduction to Robotics Jee-Hwan Ryu School of Mechanical Engineering Korea University of Technology and Education What is Robot? Robots in our Imagination What is Robot Like in Our Real Life? Origin
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics is the study and design of robots Robots can be used in different contexts and are classified as 1. Industrial robots
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics is the study and design of robots Robots can be used in different contexts and are classified as 1. Industrial robots
Autonomous Robotics. CS Fall Amarda Shehu. Department of Computer Science George Mason University
 Autonomous Robotics CS 485 - Fall 2016 Amarda Shehu Department of Computer Science George Mason University 1 Outline of Today s Class 2 Robotics over the Years 3 Trends in Robotics Research 4 Course Organization
Autonomous Robotics CS 485 - Fall 2016 Amarda Shehu Department of Computer Science George Mason University 1 Outline of Today s Class 2 Robotics over the Years 3 Trends in Robotics Research 4 Course Organization
ME7752: Mechanics and Control of Robots Lecture 1
 ME7752: Mechanics and Control of Robots Lecture 1 Instructor: Manoj Srinivasan Office: E340 Scott Laboratory Email: srinivasan.88@osu.edu ( PDF posted. In the PDF, if there are no links to videos, do a
ME7752: Mechanics and Control of Robots Lecture 1 Instructor: Manoj Srinivasan Office: E340 Scott Laboratory Email: srinivasan.88@osu.edu ( PDF posted. In the PDF, if there are no links to videos, do a
Humanoids. Lecture Outline. RSS 2010 Lecture # 19 Una-May O Reilly. Definition and motivation. Locomotion. Why humanoids? What are humanoids?
 Humanoids RSS 2010 Lecture # 19 Una-May O Reilly Lecture Outline Definition and motivation Why humanoids? What are humanoids? Examples Locomotion RSS 2010 Humanoids Lecture 1 1 Why humanoids? Capek, Paris
Humanoids RSS 2010 Lecture # 19 Una-May O Reilly Lecture Outline Definition and motivation Why humanoids? What are humanoids? Examples Locomotion RSS 2010 Humanoids Lecture 1 1 Why humanoids? Capek, Paris
MTRX 4700 : Experimental Robotics
 Mtrx 4700 : Experimental Robotics Dr. Stefan B. Williams Dr. Robert Fitch Slide 1 Course Objectives The objective of the course is to provide students with the essential skills necessary to develop robotic
Mtrx 4700 : Experimental Robotics Dr. Stefan B. Williams Dr. Robert Fitch Slide 1 Course Objectives The objective of the course is to provide students with the essential skills necessary to develop robotic
Information and Program
 Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur
 Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture - 01 Introduction to Robot and Robotics Let us start with the course on Robotics.
Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture - 01 Introduction to Robot and Robotics Let us start with the course on Robotics.
Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free Human Following Navigation in Outdoor Environment
 Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
Robotics: Evolution, Technology and Applications
 Robotics: Evolution, Technology and Applications By: Dr. Hamid D. Taghirad Head of Control Group, and Department of Electrical Engineering K.N. Toosi University of Tech. Department of Electrical Engineering
Robotics: Evolution, Technology and Applications By: Dr. Hamid D. Taghirad Head of Control Group, and Department of Electrical Engineering K.N. Toosi University of Tech. Department of Electrical Engineering
Introduction to Vision & Robotics
 Introduction to Vision & Robotics Lecturers: Tim Hospedales 50-4450, IF 1.10 t.hospedales@ed.ac.uk Michael Herrmann 51-7177, IF 1.42 michael.herrmann@ed.ac.uk Lectures (Mon and Thr 9:00 9:50) are available
Introduction to Vision & Robotics Lecturers: Tim Hospedales 50-4450, IF 1.10 t.hospedales@ed.ac.uk Michael Herrmann 51-7177, IF 1.42 michael.herrmann@ed.ac.uk Lectures (Mon and Thr 9:00 9:50) are available
IVR: Introduction to Control
 IVR: Introduction to Control OVERVIEW Control systems Transformations Simple control algorithms History of control Centrifugal governor M. Boulton and J. Watt (1788) J. C. Maxwell (1868) On Governors.
IVR: Introduction to Control OVERVIEW Control systems Transformations Simple control algorithms History of control Centrifugal governor M. Boulton and J. Watt (1788) J. C. Maxwell (1868) On Governors.
Birth of An Intelligent Humanoid Robot in Singapore
 Birth of An Intelligent Humanoid Robot in Singapore Ming Xie Nanyang Technological University Singapore 639798 Email: mmxie@ntu.edu.sg Abstract. Since 1996, we have embarked into the journey of developing
Birth of An Intelligent Humanoid Robot in Singapore Ming Xie Nanyang Technological University Singapore 639798 Email: mmxie@ntu.edu.sg Abstract. Since 1996, we have embarked into the journey of developing
Spring 19 Planning Techniques for Robotics Introduction; What is Planning for Robotics?
 16-350 Spring 19 Planning Techniques for Robotics Introduction; What is Planning for Robotics? Maxim Likhachev Robotics Institute Carnegie Mellon University About Me My Research Interests: - Planning,
16-350 Spring 19 Planning Techniques for Robotics Introduction; What is Planning for Robotics? Maxim Likhachev Robotics Institute Carnegie Mellon University About Me My Research Interests: - Planning,
Robotics Manipulation and control. University of Strasbourg Telecom Physique Strasbourg, ISAV option Master IRIV, AR track Jacques Gangloff
 Robotics Manipulation and control University of Strasbourg Telecom Physique Strasbourg, ISAV option Master IRIV, AR track Jacques Gangloff Outline of the lecture Introduction : Overview 1. Theoretical
Robotics Manipulation and control University of Strasbourg Telecom Physique Strasbourg, ISAV option Master IRIV, AR track Jacques Gangloff Outline of the lecture Introduction : Overview 1. Theoretical
INTRODUCTION to ROBOTICS
 1 INTRODUCTION to ROBOTICS Robotics is a relatively young field of modern technology that crosses traditional engineering boundaries. Understanding the complexity of robots and their applications requires
1 INTRODUCTION to ROBOTICS Robotics is a relatively young field of modern technology that crosses traditional engineering boundaries. Understanding the complexity of robots and their applications requires
Revised and extended. Accompanies this course pages heavier Perception treated more thoroughly. 1 - Introduction
 Topics to be Covered Coordinate frames and representations. Use of homogeneous transformations in robotics. Specification of position and orientation Manipulator forward and inverse kinematics Mobile Robots:
Topics to be Covered Coordinate frames and representations. Use of homogeneous transformations in robotics. Specification of position and orientation Manipulator forward and inverse kinematics Mobile Robots:
Introduction to Robotics
 Introduction to Robotics Analysis, systems, Applications Saeed B. Niku Chapter 1 Fundamentals 1. Introduction Fig. 1.1 (a) A Kuhnezug truck-mounted crane Reprinted with permission from Kuhnezug Fordertechnik
Introduction to Robotics Analysis, systems, Applications Saeed B. Niku Chapter 1 Fundamentals 1. Introduction Fig. 1.1 (a) A Kuhnezug truck-mounted crane Reprinted with permission from Kuhnezug Fordertechnik
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo. Introduction: Applications, Problems, Architectures
 Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
Lecture 23: Robotics. Instructor: Joelle Pineau Class web page: What is a robot?
 COMP 102: Computers and Computing Lecture 23: Robotics Instructor: (jpineau@cs.mcgill.ca) Class web page: www.cs.mcgill.ca/~jpineau/comp102 What is a robot? The word robot is popularized by the Czech playwright
COMP 102: Computers and Computing Lecture 23: Robotics Instructor: (jpineau@cs.mcgill.ca) Class web page: www.cs.mcgill.ca/~jpineau/comp102 What is a robot? The word robot is popularized by the Czech playwright
Henry Lin, Department of Electrical and Computer Engineering, California State University, Bakersfield Lecture 8 (Robotics) July 25 th, 2012
 July 25 th, 2012") Henry Lin, Department of Electrical and Computer Engineering, California State University, Bakersfield Lecture 8 (Robotics) July 25 th, 2012 1 2 Robotic Applications in Smart Homes Control of the physical
Henry Lin, Department of Electrical and Computer Engineering, California State University, Bakersfield Lecture 8 (Robotics) July 25 th, 2012 1 2 Robotic Applications in Smart Homes Control of the physical
Robotics 1 Industrial Robotics
 Robotics 1 Industrial Robotics Prof. Alessandro De Luca Robotics 1 1 What is a robot?! industrial definition (RIA = Robotic Institute of America) re-programmable multi-functional manipulator designed to
Robotics 1 Industrial Robotics Prof. Alessandro De Luca Robotics 1 1 What is a robot?! industrial definition (RIA = Robotic Institute of America) re-programmable multi-functional manipulator designed to
Humanoid robot. Honda's ASIMO, an example of a humanoid robot
 Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
Introduction to Robotics
 Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-3470 Introduction to Robotics Robotica for Computer Engineering students A.A.
Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-3470 Introduction to Robotics Robotica for Computer Engineering students A.A.
Sample Pages. Classroom Activities for the Busy Teacher: NXT. 2 nd Edition. Classroom Activities for the Busy Teacher: NXT -
 Classroom Activities for the Busy Teacher: NXT 2 nd Edition Table of Contents Chapter 1: Introduction... 1 Chapter 2: What is a robot?... 5 Chapter 3: Flowcharting... 11 Chapter 4: DomaBot Basics... 15
Classroom Activities for the Busy Teacher: NXT 2 nd Edition Table of Contents Chapter 1: Introduction... 1 Chapter 2: What is a robot?... 5 Chapter 3: Flowcharting... 11 Chapter 4: DomaBot Basics... 15
An Introduction to Robotics. Elliot Ratchik, MS Former Senior Scientist, Hoffman LaRoche And Mannkind Corp.
 An Introduction to Robotics Elliot Ratchik, MS Former Senior Scientist, Hoffman LaRoche And Mannkind Corp. What is a Robot What can it do History Key Components Applications Future Outline What is a Robot?
An Introduction to Robotics Elliot Ratchik, MS Former Senior Scientist, Hoffman LaRoche And Mannkind Corp. What is a Robot What can it do History Key Components Applications Future Outline What is a Robot?
COS Lecture 1 Autonomous Robot Navigation
 COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
Robot Mechanics Lec. 1: An Introduction
 Robot Mechanics Lec. 1: An Introduction Prof. S.K. Saha Dept. of Mech. Eng. IIT Delhi August 01, 2017@IIT Delhi Contribution of IIT Delhi Humanoid Robots Asimo (Honda): 120cm; 52kg Qrio (Sony): 58cm; 7kg
Robot Mechanics Lec. 1: An Introduction Prof. S.K. Saha Dept. of Mech. Eng. IIT Delhi August 01, 2017@IIT Delhi Contribution of IIT Delhi Humanoid Robots Asimo (Honda): 120cm; 52kg Qrio (Sony): 58cm; 7kg
Advanced Robotics Introduction
 Advanced Robotics Introduction Institute for Software Technology 1 Agenda Motivation Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 Bridge the Gap Mobile
Advanced Robotics Introduction Institute for Software Technology 1 Agenda Motivation Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 Bridge the Gap Mobile
A conversation with Russell Stewart, July 29, 2015
 Participants A conversation with Russell Stewart, July 29, 2015 Russell Stewart PhD Student, Stanford University Nick Beckstead Research Analyst, Open Philanthropy Project Holden Karnofsky Managing Director,
Participants A conversation with Russell Stewart, July 29, 2015 Russell Stewart PhD Student, Stanford University Nick Beckstead Research Analyst, Open Philanthropy Project Holden Karnofsky Managing Director,
Fall 17 Planning & Decision-making in Robotics Introduction; What is Planning, Role of Planning in Robots
 16-782 Fall 17 Planning & Decision-making in Robotics Introduction; What is Planning, Role of Planning in Robots Maxim Likhachev Robotics Institute Carnegie Mellon University Class Logistics Instructor:
16-782 Fall 17 Planning & Decision-making in Robotics Introduction; What is Planning, Role of Planning in Robots Maxim Likhachev Robotics Institute Carnegie Mellon University Class Logistics Instructor:
Advanced Robotics Introduction
 Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
Transer Learning : Super Intelligence
 Transer Learning : Super Intelligence GIS Group Dr Narayan Panigrahi, MA Rajesh, Shibumon Alampatta, Rakesh K P of Centre for AI and Robotics, Defence Research and Development Organization, C V Raman Nagar,
Transer Learning : Super Intelligence GIS Group Dr Narayan Panigrahi, MA Rajesh, Shibumon Alampatta, Rakesh K P of Centre for AI and Robotics, Defence Research and Development Organization, C V Raman Nagar,
Human Robot Interaction (HRI)
") Brief Introduction to HRI Batu Akan batu.akan@mdh.se Mälardalen Högskola September 29, 2008 Overview 1 Introduction What are robots What is HRI Application areas of HRI 2 3 Motivations Proposed Solution
Brief Introduction to HRI Batu Akan batu.akan@mdh.se Mälardalen Högskola September 29, 2008 Overview 1 Introduction What are robots What is HRI Application areas of HRI 2 3 Motivations Proposed Solution
Chapter 1. Robot and Robotics PP
 Chapter 1 Robot and Robotics PP. 01-19 Modeling and Stability of Robotic Motions 2 1.1 Introduction A Czech writer, Karel Capek, had first time used word ROBOT in his fictional automata 1921 R.U.R (Rossum
Chapter 1 Robot and Robotics PP. 01-19 Modeling and Stability of Robotic Motions 2 1.1 Introduction A Czech writer, Karel Capek, had first time used word ROBOT in his fictional automata 1921 R.U.R (Rossum
Robot Mechanics Lec. 1: An Introduction
 Robot Mechanics Lec. 1: An Introduction Prof. S.K. Saha Dept. of Mech. Eng. IIT Delhi August 03, 2015@IIT Delhi Contribution of IIT Delhi Humanoid Robots Asimo (Honda): 120cm; 52kg Qrio (Sony): 58cm; 7kg
Robot Mechanics Lec. 1: An Introduction Prof. S.K. Saha Dept. of Mech. Eng. IIT Delhi August 03, 2015@IIT Delhi Contribution of IIT Delhi Humanoid Robots Asimo (Honda): 120cm; 52kg Qrio (Sony): 58cm; 7kg
Cognitive robots and emotional intelligence Cloud robotics Ethical, legal and social issues of robotic Construction robots Human activities in many
 Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
JNTU World. Introduction to Robotics. Materials Provided by JNTU World Team. JNTU World JNTU World. Downloaded From JNTU World (http://(http://
 Introduction to Robotics Materials Provided by Team Definition Types Uses History Key components Applications Future Robotics @ MPCRL Outline Robot Defined Word robot was coined by a Czech novelist Karel
Introduction to Robotics Materials Provided by Team Definition Types Uses History Key components Applications Future Robotics @ MPCRL Outline Robot Defined Word robot was coined by a Czech novelist Karel
All theses offered at MERLIN (November 2017)
") All theses offered at MERLIN (November 2017) MSc theses at Politecnico di Milano Thesis with reviewer Thesis without reviewer ( tesina ) Expected effort 6 months full time 3 4 months full time Reviewer
All theses offered at MERLIN (November 2017) MSc theses at Politecnico di Milano Thesis with reviewer Thesis without reviewer ( tesina ) Expected effort 6 months full time 3 4 months full time Reviewer
Team Description 2006 for Team RO-PE A
 Team Description 2006 for Team RO-PE A Chew Chee-Meng, Samuel Mui, Lim Tongli, Ma Chongyou, and Estella Ngan National University of Singapore, 119260 Singapore {mpeccm, g0500307, u0204894, u0406389, u0406316}@nus.edu.sg
Team Description 2006 for Team RO-PE A Chew Chee-Meng, Samuel Mui, Lim Tongli, Ma Chongyou, and Estella Ngan National University of Singapore, 119260 Singapore {mpeccm, g0500307, u0204894, u0406389, u0406316}@nus.edu.sg
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
A.I in Automotive? Why and When.
 A.I in Automotive? Why and When. AGENDA 01 02 03 04 Definitions A.I? A.I in automotive Now? Next big A.I breakthrough in Automotive 01 DEFINITIONS DEFINITIONS Artificial Intelligence Artificial Intelligence:
A.I in Automotive? Why and When. AGENDA 01 02 03 04 Definitions A.I? A.I in automotive Now? Next big A.I breakthrough in Automotive 01 DEFINITIONS DEFINITIONS Artificial Intelligence Artificial Intelligence:
Robots Learning from Robots: A proof of Concept Study for Co-Manipulation Tasks. Luka Peternel and Arash Ajoudani Presented by Halishia Chugani
 Robots Learning from Robots: A proof of Concept Study for Co-Manipulation Tasks Luka Peternel and Arash Ajoudani Presented by Halishia Chugani Robots learning from humans 1. Robots learn from humans 2.
Robots Learning from Robots: A proof of Concept Study for Co-Manipulation Tasks Luka Peternel and Arash Ajoudani Presented by Halishia Chugani Robots learning from humans 1. Robots learn from humans 2.
Year 1805 Doll, made by Maillardet, that wrote in either French or English and could draw landscapes
 Unit 8 : ROBOTICS INTRODUCTION Robots are devices that are programmed to move parts, or to do work with a tool. Robotics is a multidisciplinary engineering field dedicated to the development of autonomous
Unit 8 : ROBOTICS INTRODUCTION Robots are devices that are programmed to move parts, or to do work with a tool. Robotics is a multidisciplinary engineering field dedicated to the development of autonomous
Cognitive Robotics 2017/2018
 Cognitive Robotics 2017/2018 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Cognitive Robotics 2017/2018 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Introduction to Mobile Robotics Welcome
 Introduction to Mobile Robotics Welcome Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Today This course Robotics in the past and today 2 Organization Wed 14:00 16:00 Fr 14:00 15:00 lectures, discussions
Introduction to Mobile Robotics Welcome Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Today This course Robotics in the past and today 2 Organization Wed 14:00 16:00 Fr 14:00 15:00 lectures, discussions
Introduction to Vision & Robotics
 Introduction to Vision & Robotics Vittorio Ferrari, 650-2697,IF 1.27 vferrari@staffmail.inf.ed.ac.uk Michael Herrmann, 651-7177, IF1.42 mherrman@inf.ed.ac.uk Lectures: Handouts will be on the web (but
Introduction to Vision & Robotics Vittorio Ferrari, 650-2697,IF 1.27 vferrari@staffmail.inf.ed.ac.uk Michael Herrmann, 651-7177, IF1.42 mherrman@inf.ed.ac.uk Lectures: Handouts will be on the web (but
Artificial Neural Network based Mobile Robot Navigation
 Artificial Neural Network based Mobile Robot Navigation István Engedy Budapest University of Technology and Economics, Department of Measurement and Information Systems, Magyar tudósok körútja 2. H-1117,
Artificial Neural Network based Mobile Robot Navigation István Engedy Budapest University of Technology and Economics, Department of Measurement and Information Systems, Magyar tudósok körútja 2. H-1117,
Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Politecnico di Milano - Dipartimento di Elettronica, Informazione e Bioingegneria Industrial robotics
Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Politecnico di Milano - Dipartimento di Elettronica, Informazione e Bioingegneria Industrial robotics
On-demand printable robots
 On-demand printable robots Ankur Mehta Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology 3 Computational problem? 4 Physical problem? There s a robot for that.
On-demand printable robots Ankur Mehta Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology 3 Computational problem? 4 Physical problem? There s a robot for that.
Artificial Intelligence
 Politecnico di Milano Artificial Intelligence Artificial Intelligence What and When Viola Schiaffonati viola.schiaffonati@polimi.it What is artificial intelligence? When has been AI created? Are there
Politecnico di Milano Artificial Intelligence Artificial Intelligence What and When Viola Schiaffonati viola.schiaffonati@polimi.it What is artificial intelligence? When has been AI created? Are there
Cognitive Robotics 2016/2017
 Cognitive Robotics 2016/2017 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Cognitive Robotics 2016/2017 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Robotics and Autonomous Systems
 1 / 41 Robotics and Autonomous Systems Lecture 1: Introduction Simon Parsons Department of Computer Science University of Liverpool 2 / 41 Acknowledgements The robotics slides are heavily based on those
1 / 41 Robotics and Autonomous Systems Lecture 1: Introduction Simon Parsons Department of Computer Science University of Liverpool 2 / 41 Acknowledgements The robotics slides are heavily based on those
E Technology: A. Innovations Activity: Introduction to Robotics
 Science as Inquiry: As a result of their activities in grades 5 8, all students should develop Understanding about scientific inquiry. Abilities necessary to do scientific inquiry: identify questions,
Science as Inquiry: As a result of their activities in grades 5 8, all students should develop Understanding about scientific inquiry. Abilities necessary to do scientific inquiry: identify questions,
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
What is Artificial Intelligence? Alternate Definitions (Russell + Norvig) Human intelligence
 Human intelligence") CSE 3401: Intro to Artificial Intelligence & Logic Programming Introduction Required Readings: Russell & Norvig Chapters 1 & 2. Lecture slides adapted from those of Fahiem Bacchus. What is AI? What is
CSE 3401: Intro to Artificial Intelligence & Logic Programming Introduction Required Readings: Russell & Norvig Chapters 1 & 2. Lecture slides adapted from those of Fahiem Bacchus. What is AI? What is
Robotics Enabling Autonomy in Challenging Environments
 Robotics Enabling Autonomy in Challenging Environments Ioannis Rekleitis Computer Science and Engineering, University of South Carolina CSCE 190 21 Oct. 2014 Ioannis Rekleitis 1 Why Robotics? Mars exploration
Robotics Enabling Autonomy in Challenging Environments Ioannis Rekleitis Computer Science and Engineering, University of South Carolina CSCE 190 21 Oct. 2014 Ioannis Rekleitis 1 Why Robotics? Mars exploration
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute State one reason for investigating and building humanoid robot (4 pts) List two
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute State one reason for investigating and building humanoid robot (4 pts) List two
A Brief Survey on Robotics
 Available Online at www.ijcsmc.com International Journal of Computer Science and Mobile Computing A Monthly Journal of Computer Science and Information Technology ISSN 2320 088X IMPACT FACTOR: 6.017 IJCSMC,
Available Online at www.ijcsmc.com International Journal of Computer Science and Mobile Computing A Monthly Journal of Computer Science and Information Technology ISSN 2320 088X IMPACT FACTOR: 6.017 IJCSMC,
CS 380: ARTIFICIAL INTELLIGENCE INTRODUCTION. Santiago Ontañón
 CS 380: ARTIFICIAL INTELLIGENCE INTRODUCTION Santiago Ontañón so367@drexel.edu CS 380 Focus: Introduction to AI: basic concepts and algorithms. Topics: What is AI? Problem Solving and Heuristic Search
CS 380: ARTIFICIAL INTELLIGENCE INTRODUCTION Santiago Ontañón so367@drexel.edu CS 380 Focus: Introduction to AI: basic concepts and algorithms. Topics: What is AI? Problem Solving and Heuristic Search
Course Details. Robotics is Interdisciplinary. Brief History of Robotics. Lecture 01 Robotics. Robotics 70% (WE) - 30% (CA)
 - 30% (CA)") Course Details Lecture 01 Robotics 70% (WE) - 30% (CA) Contents : Overview of Robotics, Robot Manipulator Modeling (kinematics), Robot Control (position and force), obstacle avoidance (mobile robots) MatLab
Course Details Lecture 01 Robotics 70% (WE) - 30% (CA) Contents : Overview of Robotics, Robot Manipulator Modeling (kinematics), Robot Control (position and force), obstacle avoidance (mobile robots) MatLab
Artificial Intelligence: An overview
 Artificial Intelligence: An overview Thomas Trappenberg January 4, 2009 Based on the slides provided by Russell and Norvig, Chapter 1 & 2 What is AI? Systems that think like humans Systems that act like
Artificial Intelligence: An overview Thomas Trappenberg January 4, 2009 Based on the slides provided by Russell and Norvig, Chapter 1 & 2 What is AI? Systems that think like humans Systems that act like
Department of Robotics Ritsumeikan University
 Department of Robotics Ritsumeikan University Shinichi Hirai Dept. Robotics Ritsumeikan Univ. Hanoi Institute of Technology Hanoi, Vietnam, Dec. 20, 2008 http://www.ritsumei.ac.jp/se/rm/robo/index-e.htm
Department of Robotics Ritsumeikan University Shinichi Hirai Dept. Robotics Ritsumeikan Univ. Hanoi Institute of Technology Hanoi, Vietnam, Dec. 20, 2008 http://www.ritsumei.ac.jp/se/rm/robo/index-e.htm
CS325 Artificial Intelligence Robotics I Autonomous Robots (Ch. 25)
") CS325 Artificial Intelligence Robotics I Autonomous Robots (Ch. 25) Dr. Cengiz Günay, Emory Univ. Günay Robotics I Autonomous Robots (Ch. 25) Spring 2013 1 / 15 Robots As Killers? The word robot coined
CS325 Artificial Intelligence Robotics I Autonomous Robots (Ch. 25) Dr. Cengiz Günay, Emory Univ. Günay Robotics I Autonomous Robots (Ch. 25) Spring 2013 1 / 15 Robots As Killers? The word robot coined
Intro to AI. AI is a huge field. AI is a huge field 2/19/15. What is AI. One definition:
 Intro to AI CS30 David Kauchak Spring 2015 http://www.bbspot.com/comics/pc-weenies/2008/02/3248.php Adapted from notes from: Sara Owsley Sood AI is a huge field What is AI AI is a huge field What is AI
Intro to AI CS30 David Kauchak Spring 2015 http://www.bbspot.com/comics/pc-weenies/2008/02/3248.php Adapted from notes from: Sara Owsley Sood AI is a huge field What is AI AI is a huge field What is AI
Graphical Simulation and High-Level Control of Humanoid Robots
 In Proc. 2000 IEEE RSJ Int l Conf. on Intelligent Robots and Systems (IROS 2000) Graphical Simulation and High-Level Control of Humanoid Robots James J. Kuffner, Jr. Satoshi Kagami Masayuki Inaba Hirochika
In Proc. 2000 IEEE RSJ Int l Conf. on Intelligent Robots and Systems (IROS 2000) Graphical Simulation and High-Level Control of Humanoid Robots James J. Kuffner, Jr. Satoshi Kagami Masayuki Inaba Hirochika
Industrial Robotics. Claudio Melchiorri. Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI) Università di Bologna
 Università di Bologna") Industrial Robotics Claudio Melchiorri Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI) Università di Bologna email: claudio.melchiorri@unibo.it C. Melchiorri (DEI) Industrial
Industrial Robotics Claudio Melchiorri Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI) Università di Bologna email: claudio.melchiorri@unibo.it C. Melchiorri (DEI) Industrial
Available theses (October 2012) MERLIN Group
 MERLIN Group") Available theses (October 2012) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
Available theses (October 2012) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
Logic, Ontology and Planning: the Robot s Knowledge Lecture 1
 Logic, Ontology and Planning: the Robot s Knowledge Lecture 1 Stefano Borgo Laboratory for Applied Ontology (LOA), ISTC-CNR, Trento (IT) ESSLLI course 2018 Sofia, Bulgaria Scope of the course Robotics:
Logic, Ontology and Planning: the Robot s Knowledge Lecture 1 Stefano Borgo Laboratory for Applied Ontology (LOA), ISTC-CNR, Trento (IT) ESSLLI course 2018 Sofia, Bulgaria Scope of the course Robotics:
CURRICULUM VITAE. Evan Drumwright EDUCATION PROFESSIONAL PUBLICATIONS
 CURRICULUM VITAE Evan Drumwright 209 Dunn Hall The University of Memphis Memphis, TN 38152 Phone: 901-678-3142 edrmwrgh@memphis.edu http://cs.memphis.edu/ edrmwrgh EDUCATION Ph.D., Computer Science, May
CURRICULUM VITAE Evan Drumwright 209 Dunn Hall The University of Memphis Memphis, TN 38152 Phone: 901-678-3142 edrmwrgh@memphis.edu http://cs.memphis.edu/ edrmwrgh EDUCATION Ph.D., Computer Science, May
Lets Learn of Robot Technology
 Lets Learn of Robot Technology Dr. M.S. Ajmal Deen Ali, M.E., Ph.D (IITM) Ajlon Technologies (www.ajlontech.com) Partner to : AlfaTKG Japan, IISc Bangalore & IITM The Origins of Robots 1738 Jacques de
Lets Learn of Robot Technology Dr. M.S. Ajmal Deen Ali, M.E., Ph.D (IITM) Ajlon Technologies (www.ajlontech.com) Partner to : AlfaTKG Japan, IISc Bangalore & IITM The Origins of Robots 1738 Jacques de
Wednesday, October 29, :00-04:00pm EB: 3546D. TELEOPERATION OF MOBILE MANIPULATORS By Yunyi Jia Advisor: Prof.
 Wednesday, October 29, 2014 02:00-04:00pm EB: 3546D TELEOPERATION OF MOBILE MANIPULATORS By Yunyi Jia Advisor: Prof. Ning Xi ABSTRACT Mobile manipulators provide larger working spaces and more flexibility
Wednesday, October 29, 2014 02:00-04:00pm EB: 3546D TELEOPERATION OF MOBILE MANIPULATORS By Yunyi Jia Advisor: Prof. Ning Xi ABSTRACT Mobile manipulators provide larger working spaces and more flexibility
Intro to AI. AI is a huge field. AI is a huge field 2/26/16. What is AI (artificial intelligence) What is AI. One definition:
 What is AI. One definition:") Intro to AI CS30 David Kauchak Spring 2016 http://www.bbspot.com/comics/pc-weenies/2008/02/3248.php Adapted from notes from: Sara Owsley Sood AI is a huge field What is AI (artificial intelligence) AI
Intro to AI CS30 David Kauchak Spring 2016 http://www.bbspot.com/comics/pc-weenies/2008/02/3248.php Adapted from notes from: Sara Owsley Sood AI is a huge field What is AI (artificial intelligence) AI
Neural Models for Multi-Sensor Integration in Robotics
 Department of Informatics Intelligent Robotics WS 2016/17 Neural Models for Multi-Sensor Integration in Robotics Josip Josifovski 4josifov@informatik.uni-hamburg.de Outline Multi-sensor Integration: Neurally
Department of Informatics Intelligent Robotics WS 2016/17 Neural Models for Multi-Sensor Integration in Robotics Josip Josifovski 4josifov@informatik.uni-hamburg.de Outline Multi-sensor Integration: Neurally
Andrea Calanca PERSONAL INFORMATIONS RESEARCH INTERESTS EDUCATION
 Andrea Calanca PERSONAL INFORMATIONS Name ANDREA CALANCA Birth March 12 th, 1981 Address Via Roma n. 7, 46010 Curtatone (MN) Italy E-mail Linkedin andrea.calanca@univr.it http://www.linkedin.com/profile/view?id=53047066
Andrea Calanca PERSONAL INFORMATIONS Name ANDREA CALANCA Birth March 12 th, 1981 Address Via Roma n. 7, 46010 Curtatone (MN) Italy E-mail Linkedin andrea.calanca@univr.it http://www.linkedin.com/profile/view?id=53047066
RoboCup: Not Only a Robotics Soccer Game but also a New Market Created for Future
 RoboCup: Not Only a Robotics Soccer Game but also a New Market Created for Future Kuo-Yang Tu Institute of Systems and Control Engineering National Kaohsiung First University of Science and Technology
RoboCup: Not Only a Robotics Soccer Game but also a New Market Created for Future Kuo-Yang Tu Institute of Systems and Control Engineering National Kaohsiung First University of Science and Technology
Goals of this Course. CSE 473 Artificial Intelligence. AI as Science. AI as Engineering. Dieter Fox Colin Zheng
 CSE 473 Artificial Intelligence Dieter Fox Colin Zheng www.cs.washington.edu/education/courses/cse473/08au Goals of this Course To introduce you to a set of key: Paradigms & Techniques Teach you to identify
CSE 473 Artificial Intelligence Dieter Fox Colin Zheng www.cs.washington.edu/education/courses/cse473/08au Goals of this Course To introduce you to a set of key: Paradigms & Techniques Teach you to identify
Multisensory Based Manipulation Architecture
 Marine Robot and Dexterous Manipulatin for Enabling Multipurpose Intevention Missions WP7 Multisensory Based Manipulation Architecture GIRONA 2012 Y2 Review Meeting Pedro J Sanz IRS Lab http://www.irs.uji.es/
Marine Robot and Dexterous Manipulatin for Enabling Multipurpose Intevention Missions WP7 Multisensory Based Manipulation Architecture GIRONA 2012 Y2 Review Meeting Pedro J Sanz IRS Lab http://www.irs.uji.es/
Robot Hands: Mechanics, Contact Constraints, and Design for Open-loop Performance
 Robot Hands: Mechanics, Contact Constraints, and Design for Open-loop Performance Aaron M. Dollar John J. Lee Associate Professor of Mechanical Engineering and Materials Science Aerial Robotics Yale GRAB
Robot Hands: Mechanics, Contact Constraints, and Design for Open-loop Performance Aaron M. Dollar John J. Lee Associate Professor of Mechanical Engineering and Materials Science Aerial Robotics Yale GRAB
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics
 Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
CMDragons 2009 Team Description
 CMDragons 2009 Team Description Stefan Zickler, Michael Licitra, Joydeep Biswas, and Manuela Veloso Carnegie Mellon University {szickler,mmv}@cs.cmu.edu {mlicitra,joydeep}@andrew.cmu.edu Abstract. In this
CMDragons 2009 Team Description Stefan Zickler, Michael Licitra, Joydeep Biswas, and Manuela Veloso Carnegie Mellon University {szickler,mmv}@cs.cmu.edu {mlicitra,joydeep}@andrew.cmu.edu Abstract. In this
PHYSICAL ROBOTS PROGRAMMING BY IMITATION USING VIRTUAL ROBOT PROTOTYPES
 Bulletin of the Transilvania University of Braşov Series I: Engineering Sciences Vol. 6 (55) No. 2-2013 PHYSICAL ROBOTS PROGRAMMING BY IMITATION USING VIRTUAL ROBOT PROTOTYPES A. FRATU 1 M. FRATU 2 Abstract:
Bulletin of the Transilvania University of Braşov Series I: Engineering Sciences Vol. 6 (55) No. 2-2013 PHYSICAL ROBOTS PROGRAMMING BY IMITATION USING VIRTUAL ROBOT PROTOTYPES A. FRATU 1 M. FRATU 2 Abstract:
CS 730/830: Intro AI. Prof. Wheeler Ruml. TA Bence Cserna. Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1
 CS 730/830: Intro AI Prof. Wheeler Ruml TA Bence Cserna Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1 Wheeler Ruml (UNH) Lecture 1, CS 730 1 / 23 My Definition
CS 730/830: Intro AI Prof. Wheeler Ruml TA Bence Cserna Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1 Wheeler Ruml (UNH) Lecture 1, CS 730 1 / 23 My Definition
CONTROL SYSTEMS, ROBOTICS, AND AUTOMATION Vol.XXII Robotics - T. Fukuda and N. Kubota. T. Fukuda Department of Micro Systems, Nagoya University, JAPAN
 ROBOTICS T. Fukuda Department of Micro Systems, Nagoya University, JAPAN N. Kubota Department of Human and Artificial Intelligent Systems, Fukui University, JAPAN Keywords: Mobile Robot, Robot Manipulator,
ROBOTICS T. Fukuda Department of Micro Systems, Nagoya University, JAPAN N. Kubota Department of Human and Artificial Intelligent Systems, Fukui University, JAPAN Keywords: Mobile Robot, Robot Manipulator,
Human-like Assembly Robots in Factories
 5-88 June Symposium on Japan America Frontier of Engineering (JAFOE) Robotics Session: Human-like Assembly Robots in Factories 8th June Robotics Technology R&D Group Shingo Ando 0520 Introduction: Overview
5-88 June Symposium on Japan America Frontier of Engineering (JAFOE) Robotics Session: Human-like Assembly Robots in Factories 8th June Robotics Technology R&D Group Shingo Ando 0520 Introduction: Overview
Robotics 2 Collision detection and robot reaction
 Robotics 2 Collision detection and robot reaction Prof. Alessandro De Luca Handling of robot collisions! safety in physical Human-Robot Interaction (phri)! robot dependability (i.e., beyond reliability)!
Robotics 2 Collision detection and robot reaction Prof. Alessandro De Luca Handling of robot collisions! safety in physical Human-Robot Interaction (phri)! robot dependability (i.e., beyond reliability)!
IBA: Intelligent Bug Algorithm A Novel Strategy to Navigate Mobile Robots Autonomously
 IBA: Intelligent Bug Algorithm A Novel Strategy to Navigate Mobile Robots Autonomously Muhammad Zohaib 1, Syed Mustafa Pasha 1, Nadeem Javaid 2, and Jamshed Iqbal 1(&) 1 Department of Electrical Engineering,
IBA: Intelligent Bug Algorithm A Novel Strategy to Navigate Mobile Robots Autonomously Muhammad Zohaib 1, Syed Mustafa Pasha 1, Nadeem Javaid 2, and Jamshed Iqbal 1(&) 1 Department of Electrical Engineering,
PICK AND PLACE HUMANOID ROBOT USING RASPBERRY PI AND ARDUINO FOR INDUSTRIAL APPLICATIONS
 PICK AND PLACE HUMANOID ROBOT USING RASPBERRY PI AND ARDUINO FOR INDUSTRIAL APPLICATIONS Bernard Franklin 1, Sachin.P 2, Jagadish.S 3, Shaista Noor 4, Rajashekhar C. Biradar 5 1,2,3,4,5 School of Electronics
PICK AND PLACE HUMANOID ROBOT USING RASPBERRY PI AND ARDUINO FOR INDUSTRIAL APPLICATIONS Bernard Franklin 1, Sachin.P 2, Jagadish.S 3, Shaista Noor 4, Rajashekhar C. Biradar 5 1,2,3,4,5 School of Electronics
Keywords: Multi-robot adversarial environments, real-time autonomous robots
 ROBOT SOCCER: A MULTI-ROBOT CHALLENGE EXTENDED ABSTRACT Manuela M. Veloso School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213, USA veloso@cs.cmu.edu Abstract Robot soccer opened
ROBOT SOCCER: A MULTI-ROBOT CHALLENGE EXTENDED ABSTRACT Manuela M. Veloso School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213, USA veloso@cs.cmu.edu Abstract Robot soccer opened
Physics-Based Manipulation in Human Environments
 Vol. 31 No. 4, pp.353 357, 2013 353 Physics-Based Manipulation in Human Environments Mehmet R. Dogar Siddhartha S. Srinivasa The Robotics Institute, School of Computer Science, Carnegie Mellon University
Vol. 31 No. 4, pp.353 357, 2013 353 Physics-Based Manipulation in Human Environments Mehmet R. Dogar Siddhartha S. Srinivasa The Robotics Institute, School of Computer Science, Carnegie Mellon University
Path Planning in Dynamic Environments Using Time Warps. S. Farzan and G. N. DeSouza
 Path Planning in Dynamic Environments Using Time Warps S. Farzan and G. N. DeSouza Outline Introduction Harmonic Potential Fields Rubber Band Model Time Warps Kalman Filtering Experimental Results 2 Introduction
Path Planning in Dynamic Environments Using Time Warps S. Farzan and G. N. DeSouza Outline Introduction Harmonic Potential Fields Rubber Band Model Time Warps Kalman Filtering Experimental Results 2 Introduction
Biomimetic Design of Actuators, Sensors and Robots
 Biomimetic Design of Actuators, Sensors and Robots Takashi Maeno, COE Member of autonomous-cooperative robotics group Department of Mechanical Engineering Keio University Abstract Biological life has greatly
Biomimetic Design of Actuators, Sensors and Robots Takashi Maeno, COE Member of autonomous-cooperative robotics group Department of Mechanical Engineering Keio University Abstract Biological life has greatly
What is a robot? Introduction. Some Current State-of-the-Art Robots. More State-of-the-Art Research Robots. Version:
 What is a robot? Notion derives from 2 strands of thought: Introduction Version: 15.10.03 - Humanoids human-like - Automata self-moving things Robot derives from Czech word robota - Robota : forced work
What is a robot? Notion derives from 2 strands of thought: Introduction Version: 15.10.03 - Humanoids human-like - Automata self-moving things Robot derives from Czech word robota - Robota : forced work
Robotics Introduction Matteo Matteucci
 Robotics Introduction About me and my lectures 2 Lectures given by Matteo Matteucci +39 02 2399 3470 matteo.matteucci@polimi.it http://www.deib.polimi.it/ Research Topics Robotics and Autonomous Systems
Robotics Introduction About me and my lectures 2 Lectures given by Matteo Matteucci +39 02 2399 3470 matteo.matteucci@polimi.it http://www.deib.polimi.it/ Research Topics Robotics and Autonomous Systems
Evolutionary robotics Jørgen Nordmoen
 INF3480 Evolutionary robotics Jørgen Nordmoen Slides: Kyrre Glette Today: Evolutionary robotics Why evolutionary robotics Basics of evolutionary optimization INF3490 will discuss algorithms in detail Illustrating
INF3480 Evolutionary robotics Jørgen Nordmoen Slides: Kyrre Glette Today: Evolutionary robotics Why evolutionary robotics Basics of evolutionary optimization INF3490 will discuss algorithms in detail Illustrating