A Co-worker Robot PaDY" for Automobile Assembly Line
|
|
|
- Hannah Sparks
- 6 years ago
- Views:
Transcription

1 A Co-worker Robot PaDY" for Automobile Assembly Line Kazuhiro Kosuge Department of Bioengineering and Robotics Graduate School of Engineering Tohoku University Sendai , JAPAN
2 Outline Human-Robot Coordination and Interaction Examples of human-robot cooperation Dance Partner Robots MS DanceR PBDR PaDY Concept PaDY in a factory B-PaDY D-PaDY IVIS Conclusions
3 Outline Human-Robot Coordination and Interaction Examples of human-robot cooperation Dance Partner Robots MS DanceR PBDR PaDY Concept PaDY in a factory B-PaDY D-PaDY IVIS Conclusions
![Human Power Augmentation Human Power Augmentation [1] K. Kosuge, Y. Fujisawa, T.](/docs-images/75/71608371/images/4-2.jpg "Fukuda, Mechanical System Control with Man-Machine-Environment Interactions, [Proceedings of the 1993 IEEE International Conference on Robotics and Automation (1993) 239-244].")
4 Human Power Augmentation Human Power Augmentation [1] K. Kosuge, Y. Fujisawa, T. Fukuda, Mechanical System Control with Man-Machine-Environment Interactions, [Proceedings of the 1993 IEEE International Conference on Robotics and Automation (1993) ]. [2] 小菅一弘, 藤沢佳生, 福田敏男, 環境との相互作用が生じるマン マシン系の制御, [ 日本機械学会論文集 (C 編 ) 59 (562) (1993) ].
5 Human Power Augmentation F h Q 1 M v F e D v K v Operator Tool Environment Use of a Tool
6 Human Power Augmentation F h Q 1 M v F e D v K v M v!!+ x D x! v + K v x = QF h F e Virtual Tool Dynamics


7 Robot Helpers Human-Robot Cooperation (Kosuge, 1993)
8 Robot Helpers Robot j Robot i Object Human l Human m Robot k Passive Dynamics Stability Issues
![Robot Helpers MR Helper (Mobile Robot Helper, 1997~) [1] K. Kosuge, M.](/docs-images/75/71608371/images/9-2.jpg "Sato, Mobile Robot Helper, [Proceedings of the 2000 IEEE International Conference on Robotics and Automation (2000) 583-588].")
9 Robot Helpers MR Helper (Mobile Robot Helper, 1997~) [1] K. Kosuge, M. Sato, Mobile Robot Helper, [Proceedings of the 2000 IEEE International Conference on Robotics and Automation (2000) ]. [2] 小菅一弘, 須田理央, 風村典秀, 佐藤学, 角谷啓, 人と双腕型移動ロボット MR Helper による物体の協調搬送, [ 日本機械学会論文集 (C 編 ) 69 (685) (2003) 84-90].
10 Impedance-based Control Algorithm I F ext Object M obj F base D obj K obj x obj Mobile Base M base x base D base World Frame


11 Robot Helpers Aggressive maneuver Robustness in 2004 MR Helper (Mobile Robot Helper, 1997~)
12 Impedance-based Control Algorithm II Object M obj F ext K base Object M obj F base D base d x base M base x base D obj x obj Mobile Base World Frame World Frame


13 Robot Helpers MR Helper Dual Mode Coordination
")
14 Robot Helpers DR Helpers (Distributed Robot Helpers) Y. Hirata, K. Kosuge, Distributed Robot Helpers Handling a Single Object in Cooperation with a Human, [Proceedings of the 2000 IEEE International Conference on Robotics and Automations (2000) ]. 平田泰久, 初雁卓郎, 小菅一弘, 淺間一, 嘉悦早人, 川端邦明, 人間と複数の分散型ロボットヘルパ - との協調による単一物体の搬送, [ 日本機械学会論文集 (C 編 ) 68 (668) (2002) ].

15 Robot Helpers DR Helpers (Distributed Robot Helpers) Y. Hirata, Y. Kume, Z. D. Wang, K. Kosuge, Decentralized Control of Multiple Mobile Manipulators Based on Virtual 3-D Caster Motion for Handling an Object in Cooperation with a Human, [Proceedings of the 2003 IEEE International Conference on Robotics and Automation (2003) ].

16 for Human Environments In a Science Museum


17 for Human Environments Priority-on-Orientation Control Priority-on-Position Control Singular Configuration Control K. Nakai, K. Kosuge, Y. Hirata, Control of Robot in Singular Configurations for Human-Robot Coordination, [Proceedings of the 2002 IEEE International Workshop on Robot and Human Interactive Communication (2002) ].
![for Human Environments Model Based Adaptive Collision Detection [1] S. Morinaga, K.](/docs-images/75/71608371/images/18-2.jpg "Kosuge, Compliant Motion Control of Manipulator s Redundant DOF Based on Model-based Collision Detection System, [Proceedings of the 2004 IEEE")
![International Conference on Robotics and Automation (2004) 5212-5217].](/docs-images/75/71608371/images/18-3.jpg "[2] 小菅一弘, 松本大志, 盛永真也, 適応制御を利用したマニピュレータの衝突検出, [ 計測自動制御学会論文集 39 (6) (2003) 552-558]. [3] T. Matsumoto, K.")
18 for Human Environments Model Based Adaptive Collision Detection [1] S. Morinaga, K. Kosuge, Compliant Motion Control of Manipulator s Redundant DOF Based on Model-based Collision Detection System, [Proceedings of the 2004 IEEE International Conference on Robotics and Automation (2004) ]. [2] 小菅一弘, 松本大志, 盛永真也, 適応制御を利用したマニピュレータの衝突検出, [ 計測自動制御学会論文集 39 (6) (2003) ]. [3] T. Matsumoto, K. Kosuge, Dynamic Collision Detection Method Using Adaptive Control Law, [Proceedings of IEEE International Conference on Industrial Electronics Control and Instrument (2000) ].
![for Human Environments Model Based Adaptive Collision Detection [1] S. Morinaga, K.](/docs-images/75/71608371/images/19-2.jpg "Kosuge, Compliant Motion Control of Manipulator s Redundant DOF Based on Model-based Collision Detection System, [Proceedings of the 2004 IEEE")
![International Conference on Robotics and Automation (2004) 5212-5217].](/docs-images/75/71608371/images/19-3.jpg "[2] 小菅一弘, 松本大志, 盛永真也, 適応制御を利用したマニピュレータの衝突検出, [ 計測自動制御学会論文集 39 (6) (2003) 552-558]. [3] T. Matsumoto, K.")
19 for Human Environments Model Based Adaptive Collision Detection [1] S. Morinaga, K. Kosuge, Compliant Motion Control of Manipulator s Redundant DOF Based on Model-based Collision Detection System, [Proceedings of the 2004 IEEE International Conference on Robotics and Automation (2004) ]. [2] 小菅一弘, 松本大志, 盛永真也, 適応制御を利用したマニピュレータの衝突検出, [ 計測自動制御学会論文集 39 (6) (2003) ]. [3] T. Matsumoto, K. Kosuge, Dynamic Collision Detection Method Using Adaptive Control Law, [Proceedings of IEEE International Conference on Industrial Electronics Control and Instrument (2000) ].
20 Model Based Adaptive Collision Detection Model Based Adaptive Collision Detection [1] S. Morinaga, K. Kosuge, Compliant Motion Control of Manipulator s Redundant DOF Based on Model-based Collision Detection System, [Proceedings of the 2004 IEEE International Conference on Robotics and Automation (2004) ]. [2] 小菅一弘, 松本大志, 盛永真也, 適応制御を利用したマニピュレータの衝突検出 [3] 小菅, 松本, 盛永, 適応制御を利用したマニピュレータの衝突検出, [ 計測自動制御学会論文集 39 (6) (2003) ]., [3] T. Matsumoto, K. Kosuge, Dynamic Collision Detection 計測自動制御学会論文集 Method Using Adaptive Control, 第 39 巻 Law,, 第 6 号 [Proceedings,pp , of 2003 IEEE International Conference on Industrial Electronics Control and Instrument (2000) ].
![Self-Collision Detection Based on RoBE [1] F. Seto, K. Kosuge, Y.](/docs-images/75/71608371/images/21-2.jpg "Hirata, Self-collision Avoidance Motion Control for Human Robot Cooperation System using RoBE, [Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems (2005)")
21 Self-Collision Detection Based on RoBE [1] F. Seto, K. Kosuge, Y. Hirata, Self-collision Avoidance Motion Control for Human Robot Cooperation System using RoBE, [Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems (2005) 50-55]. [2] F. Seto, K. Kosuge, Y. Hirata, Real-time Self-collision Avoidance System for Robots using RoBE, [International Journal of Humanoid Robotics 1 (3) (2004) ].


![on Intelligent Robots and Systems (2005) 50-55]. [2] F. Seto, K. Kosuge, Y.](/docs-images/75/71608371/images/22-4.jpg "Hirata, Real-time Self-collision Avoidance System for Robots using RoBE,")
22 Self-Collision Detection Based on RoBE B S SHOULDER S E ELBOW E H BODY HAND [1] F. Seto, K. Kosuge, Y. Hirata, Self-collision Avoidance Motion Control for Human Robot Cooperation System using RoBE, [Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems (2005) 50-55]. [2] F. Seto, K. Kosuge, Y. Hirata, Real-time Self-collision Avoidance System for Robots using RoBE, [International Journal of Humanoid Robotics 1 (3) (2004) ].
![Self-Collision Detection Based on RoBE Self-Collision Detection Based on RoBE [1] F. Seto, K. Kosuge, Y.](/docs-images/75/71608371/images/23-2.jpg "Hirata, Self-collision Avoidance Motion Control for Human Robot Cooperation System using RoBE, [Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems (2005)")
23 Self-Collision Detection Based on RoBE Self-Collision Detection Based on RoBE [1] F. Seto, K. Kosuge, Y. Hirata, Self-collision Avoidance Motion Control for Human Robot Cooperation System using RoBE, [Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems (2005) 50-55]. [2] F. Seto, K. Kosuge, Y. Hirata, Real-time Self-collision Avoidance System for Robots using RoBE, [International Journal of Humanoid Robotics 1 (3) (2004) ].
24 Outline Human-Robot Coordination and Interaction Examples of human-robot cooperation Dance Partner Robots MS DanceR PBDR PaDY Concept PaDY in a factory B-PaDY D-PaDY IVIS Conclusions
25 Lessons Learned Lessons learned from Robot Helpers Some simple tasks, which could not be done by a human/humans, could be done with a robot helper(s). General tasks could not be done easily even with the assistive robot system(s), because the robot does not know how to collaborate with the human.
26 Lessons Learned In order to collaborate with the user, the robot has to know the task, its user s intention, and how the user wants to be assisted
27 Lessons Learned Lessons learned from Robot Helpers Some simple tasks, which could not be done by a human/humans, could be done with a robot helper(s). General tasks could not be done easily even with the assistive robot system(s), because the robot does not know how to collaborate with the human.
28 Lessons Learned In order to collaborate with the user, the robot has to know the task, its user s intention, and how the user wants to be assisted

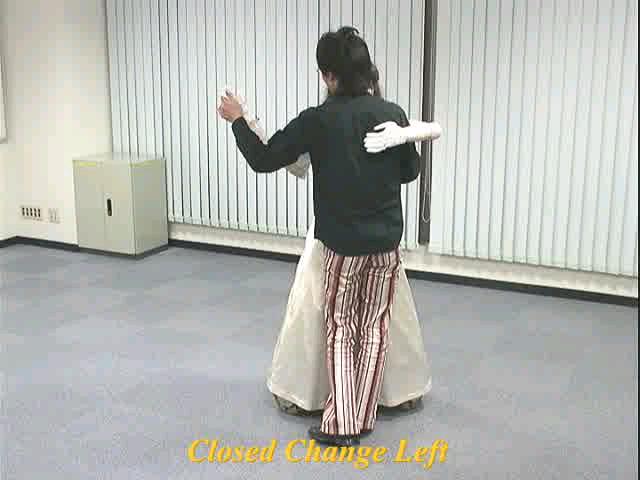
29 Dance Partner Robot To develop a mechanism for closer humanrobot coordination/interaction
30 Design of Estimator Reference Data Dance Step A Transition Dance Step B Force/Moment T effective Time Primitive Methods: Instantaneous Data at Transitions of Steps

31 Control Architecture CAST (Control Architecture based-on Step Transition) Blues Step Transition Step Motion Knowledge Waltz Step Transition Step Motion Tango Step Transition Step Motion Knowledge of ballroom dances Step Estimator Estimated step Motion Generator Basic step trajectory Sensory information Sensory information Desired motion Robot Hardware Sensors Actuators
32 Experiment

33 Aichi Expo (March 24 ~ September 25, 2005)
34 Sensory Data Used for Estimation Reference Data Dance Step A Transition Dance Step B Force/Moment T effective Time Time series data include uncertainty such as time-lag and variation because a dancer cannot always apply the same force/moment for each step transition.
35 Sensory Data Used for Estimation Next Dance Step HMM-based Step Estimator Dance Step A Transition Dance Step B Force/Moment T effective Time

36 Dance Partner Robots PBDR as a Research Platform for Human-robot interaction
37 Challenges for Dance Partner Robots Stable physical interaction between a human and a robot Female Dance Partner Robot Human behavior/intention estimation How to read the its partner s lead Male Dance Partner Robot How to convey robot s intention to its human partner Motion Entrainment Based on Human modeling
38 Outline Human-Robot Coordination and Interaction Examples of human-robot cooperation Dance Partner Robots MS DanceR PBDR PaDY Concept PaDY in a factory B-PaDY D-PaDY IVIS Conclusions

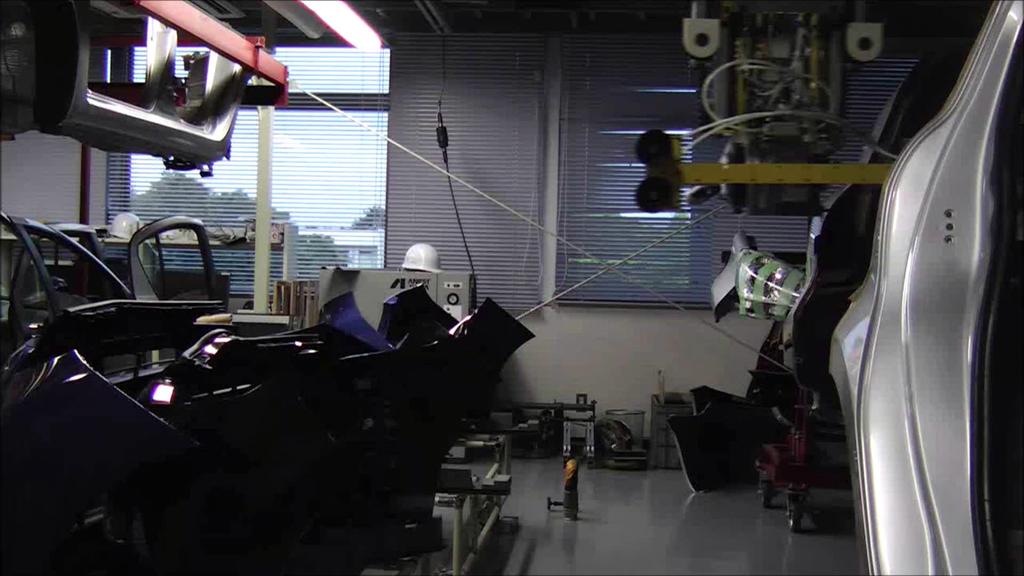
39 Automobile Factories Welding Process Industrial robots have played important roles in manufacturing industries, especially in automobile factories.

40 Automobile Assembly Line If a robot could provide the worker with necessary parts and tools when he/ she needs them, the worker could concentrate on the assembly tasks. What the worker has to do is to assemble delivered parts using delivered tools to accomplish the work. [1] 衣川潤, 川合雄太, 菅原雄介, 小菅一弘, 組立作業支援パートナロボット PaDY( 第 1 報, コンセプトモデルの開発とその制御 ),[ 日本機械学会論文集,C 編,77(783),(2011), ] [2] J. Kinugawa, Y. Kawaai, Y. Sugahara and K. Kosuge, PaDY : Human-Friendly/Cooperative Working Support Robot for Production Site, [The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems Proceedings,(2010), ].
41 Working Partner Robot PaDY PaDY is a robot which delivers necessary parts and tools to a worker when he/she needs them. to reduce the worker s load to improve efficiency of the work to prevent mistakes of the work etc. PaDY [1] 衣川潤, 川合雄太, 菅原雄介, 小菅一弘, 組立作業支援パートナロボット PaDY( 第 1 報, コンセプトモデルの開発とその制御 ),[ 日本機械学会論文集,C 編,77(783),(2011), ] [2] J. Kinugawa, Y. Kawaai, Y. Sugahara and K. Kosuge, PaDY : Human-Friendly/Cooperative Working Support Robot for Production Site, [The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems Proceedings,(2010), ]. in-time Parts/tools Delivery to You robot
42 Working Partner Robot PaDY How the work is done completely depends on the worker. The work could not be done as scheduled. The work may be done earlier or delayed
43 Working Partner Robot PaDY Even if robot arm motion is generated by the work schedule given to the worker, the cooperative work dose not go well.
44 Working Partner Robot PaDY In order to deliver parts/tools to a place, where the worker needs them, when the worker needs them without disturbing the worker s work. the robot needs to know the task, its user s intention, and how the user want to be assisted
![The First Prototype of PaDY (P1) Size:(W)1370 (D)590 (H)1035[mm] Link Mechanism :Horizontal ArEculated Robot Maximum Reach:2.](/docs-images/75/71608371/images/45-2.jpg "0 [m](1 st Link Length:1168[mm], 2 nd Link Length:982[mm]) Weight of Working Parts:11.")
45 The First Prototype of PaDY (P1) Size:(W)1370 (D)590 (H)1035[mm] Link Mechanism :Horizontal ArEculated Robot Maximum Reach:2.0 [m](1 st Link Length:1168[mm], 2 nd Link Length:982[mm]) Weight of Working Parts:11.5[kg] Maximum Load:3 [kg] Range of Movement: 1 st Joint: 200[deg], 2 nd Joint: 360[deg] Actuator:1 st Joint & 2 nd Joint:DC Servo Motor 80[W], 3 rd Joint: DC Servo Motor 15[W]
46 Outline Human-Robot Coordination and Interaction Examples of human-robot cooperation Dance Partner Robots MS DanceR PBDR PaDY Concept PaDY in a factory B-PaDY D-PaDY IVIS Conclusions
47 B-PaDY
48 Outline Human-Robot Coordination and Interaction Examples of human-robot cooperation Dance Partner Robots MS DanceR PBDR PaDY Concept PaDY in a factory B-PaDY D-PaDY IVIS Conclusions

49 49/40 D-PaDY
50 Outline Human-Robot Coordination and Interaction Examples of human-robot cooperation Dance Partner Robots MS DanceR PBDR PaDY Concept PaDY in a factory B-PaDY D-PaDY IVIS Conclusions







51 Integration of Vision and Force ivis Integrated Visual and Impedance Servo Takashi Nanmoto,Kazuhiro Kosuge,Koichi Hashimoto, Model-Based Compliant Motion Control Scheme for Assembly Tasks Using Vision and Force Information, [Proceedings of 2013 IEEE International Conference on Automation Science and Engineering,(2013)]


52 Control Architecture Force Control Coordinate system Attached to the CAD model Trajectory GeneraEon Inverse Kinematics Impedance Model Impedance Control CAD model based Impedance control Motion Controller Forward Kinematics External Force Estimation Force Control Coordinate System Estimation Manipulator Force Sensor Goal Image Generated by a CAD model Estimation of Motion deviation Pose Estimation Visual Tracking Servo Image Sensor Visual Servo 52
53 Experiments Camera image of an object A and its CAD model based image Goal Image of the assembled objects Camera image of an object B and its CAD model based image 53

54 Assembly of two parts using multipurpose robot hands by ivis 54

55 Assembly of Two Parts by Demonstration

56 Robotics Research Unit Technologies Technical Issues Required Services Domain 1 Elderly Care Domain 2 Agriculture Domain 3 Medicine Applications/Services New Services Service/Applicationoriented Robotics Robotics Foundations Robotics Foundations Current Robot Function JST, CRDS, 2009, Modified by Kosuge, August, 2011
Human-Robot Interaction from Dance Partner Robot to Co-worker Robot
 Human-Robot Interaction from Dance Partner Robot to Co-worker Robot Kazuhiro Kosuge Systems Robotics Lab. Department of Robotics Graduate School of Engineering Tohoku University Sendai 980-8579, JAPAN
Human-Robot Interaction from Dance Partner Robot to Co-worker Robot Kazuhiro Kosuge Systems Robotics Lab. Department of Robotics Graduate School of Engineering Tohoku University Sendai 980-8579, JAPAN
HMM-based Error Recovery of Dance Step Selection for Dance Partner Robot
 27 IEEE International Conference on Robotics and Automation Roma, Italy, 1-14 April 27 ThA4.3 HMM-based Error Recovery of Dance Step Selection for Dance Partner Robot Takahiro Takeda, Yasuhisa Hirata,
27 IEEE International Conference on Robotics and Automation Roma, Italy, 1-14 April 27 ThA4.3 HMM-based Error Recovery of Dance Step Selection for Dance Partner Robot Takahiro Takeda, Yasuhisa Hirata,
[1] 大橋和也, 森拓哉, 古関隆章 運転整理時における乗車率に応じた旅客行動の変化のモデル化 電気学会論文誌 D,J-Rail 2013 特集,2015,pp
![[1] 大橋和也, 森拓哉, 古関隆章 運転整理時における乗車率に応じた旅客行動の変化のモデル化 電気学会論文誌 D,J-Rail 2013 特集,2015,pp](/thumbs/94/119006158.jpg "[1] 大橋和也, 森拓哉, 古関隆章 運転整理時における乗車率に応じた旅客行動の変化のモデル化 電気学会論文誌 D,J-Rail 2013 特集,2015,pp") 5. 発表論文 / 著作物 5.1 列車の運転整理 [1] 大橋和也, 森拓哉, 古関隆章 運転整理時における乗車率に応じた旅客行動の変化のモデル化 電気学会論文誌 D,J-Rail 2013 特集,2015,pp438-443 24 [2] 森拓哉, 渡邉翔一郎, 古関隆章 混合整数計画法による全列車各駅停車の路線に快速列車を取り入れることによる旅客総旅行時間最小化 NU-Rail,2015 5.2
5. 発表論文 / 著作物 5.1 列車の運転整理 [1] 大橋和也, 森拓哉, 古関隆章 運転整理時における乗車率に応じた旅客行動の変化のモデル化 電気学会論文誌 D,J-Rail 2013 特集,2015,pp438-443 24 [2] 森拓哉, 渡邉翔一郎, 古関隆章 混合整数計画法による全列車各駅停車の路線に快速列車を取り入れることによる旅客総旅行時間最小化 NU-Rail,2015 5.2
ジェスチャ併用型 Voice-to-MIDI システムの提案 第五回知識創造支援システムシンポジウム報告書 : 本著作物の著作権は著者に帰属します
 JAIST Reposi https://dspace.j Title ジェスチャ併用型 Voice-to-MIDI システムの提案 Author(s) 伊藤, 直樹 ; 西本, 一志 Citation 第五回知識創造支援システムシンポジウム報告書 : 167-172 Issue Date 2008-03-14 Type Conference Paper Text version author URL
JAIST Reposi https://dspace.j Title ジェスチャ併用型 Voice-to-MIDI システムの提案 Author(s) 伊藤, 直樹 ; 西本, 一志 Citation 第五回知識創造支援システムシンポジウム報告書 : 167-172 Issue Date 2008-03-14 Type Conference Paper Text version author URL
(Osaka Industrial Technology - Platform)
") Challenge of Industry-University Cooperation of OIT 大阪工業大学による地域産学連携の試み (Osaka Industrial Technology - Platform) Osaka Institute of Technology Vice President Masatoshi KOTERA Four faculties in three Campuses
Challenge of Industry-University Cooperation of OIT 大阪工業大学による地域産学連携の試み (Osaka Industrial Technology - Platform) Osaka Institute of Technology Vice President Masatoshi KOTERA Four faculties in three Campuses
Multi-bit Sigma-Delta TDC Architecture for Digital Signal Timing Measurement
 IEEE International ixed-signals, Sensors, and Systems Test Workshop, Taipei, 22 ulti-bit Sigma-Delta TDC Architecture for Digital Signal Timing easurement S. emori,. Ishii, H. Kobayashi, O. Kobayashi T.
IEEE International ixed-signals, Sensors, and Systems Test Workshop, Taipei, 22 ulti-bit Sigma-Delta TDC Architecture for Digital Signal Timing easurement S. emori,. Ishii, H. Kobayashi, O. Kobayashi T.
製品系列統合化設計とそのタスク構造 日本機械学会論文集 C 編. 65(629) P.416-P
 P.416-P") Title 製品系列統合化設計とそのタスク構造 uthor(s) 藤田, 喜久雄 ; 石井, 浩介 Citation 日本機械学会論文集 C 編. 65(629) P.416-P.423 Issue Date 1999-01 Text Version publisher URL http://hdl.handle.net/11094/3391 DOI rights (C ) 65 629 (1999-1)
Title 製品系列統合化設計とそのタスク構造 uthor(s) 藤田, 喜久雄 ; 石井, 浩介 Citation 日本機械学会論文集 C 編. 65(629) P.416-P.423 Issue Date 1999-01 Text Version publisher URL http://hdl.handle.net/11094/3391 DOI rights (C ) 65 629 (1999-1)
IN MOST human robot coordination systems that have
 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 54, NO. 2, APRIL 2007 699 Dance Step Estimation Method Based on HMM for Dance Partner Robot Takahiro Takeda, Student Member, IEEE, Yasuhisa Hirata, Member,
IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 54, NO. 2, APRIL 2007 699 Dance Step Estimation Method Based on HMM for Dance Partner Robot Takahiro Takeda, Student Member, IEEE, Yasuhisa Hirata, Member,
Intermediate Conversation Material #10
 Intermediate Conversation Material #10 OUR AGENDA FOR TODAY At work Exercise 1: Picture Conversation A. Read the dialogue below. 次の会話を読んでみましょう Ms. Jefferson, what s our agenda for today s meeting? Our
Intermediate Conversation Material #10 OUR AGENDA FOR TODAY At work Exercise 1: Picture Conversation A. Read the dialogue below. 次の会話を読んでみましょう Ms. Jefferson, what s our agenda for today s meeting? Our
アルゴリズムの設計と解析. 教授 : 黄潤和 (W4022) SA: 広野史明 (A4/A8)
 SA: 広野史明 (A4/A8)") アルゴリズムの設計と解析 教授 : 黄潤和 (W4022) rhuang@hosei.ac.jp SA: 広野史明 (A4/A8) fumiaki.hirono.5k@stu.hosei.ac.jp Divide and Conquer Dynamic Programming L3. 動的計画法 Dynamic Programming What is dynamic programming? Dynamic
アルゴリズムの設計と解析 教授 : 黄潤和 (W4022) rhuang@hosei.ac.jp SA: 広野史明 (A4/A8) fumiaki.hirono.5k@stu.hosei.ac.jp Divide and Conquer Dynamic Programming L3. 動的計画法 Dynamic Programming What is dynamic programming? Dynamic
JSPS Science Dialog Program Kofu Higashi High School
 JSPS Science Dialog Program Kofu Higashi High School July 27th, 2011 Quang-Cuong Pham JSPS postdoctoral fellow Nakamura-Takano Laboratory Department of Mechano-Informatics University of Tokyo With the
JSPS Science Dialog Program Kofu Higashi High School July 27th, 2011 Quang-Cuong Pham JSPS postdoctoral fellow Nakamura-Takano Laboratory Department of Mechano-Informatics University of Tokyo With the
GDC2009 ゲーム AI 分野オーバービュー
 GDC2009 ゲーム AI 分野オーバービュー 三宅陽一郎 ( 株式会社フロム ソフトウェア ) y.m.4160@gmail.com 2009.3.31 Contact Information Youichiro Miyake Mail: Twitter: @miyayou Blog: y.m.4160@gmail.com http://blogai.igda.jp LinkedIn: http://www.linkedin.com/in/miyayou
GDC2009 ゲーム AI 分野オーバービュー 三宅陽一郎 ( 株式会社フロム ソフトウェア ) y.m.4160@gmail.com 2009.3.31 Contact Information Youichiro Miyake Mail: Twitter: @miyayou Blog: y.m.4160@gmail.com http://blogai.igda.jp LinkedIn: http://www.linkedin.com/in/miyayou
Infineon 24GHz Radar Solution. May 2017 PMM RSF DM PMM Business development
 Infineon 24GHz Radar Solution May 2017 PMM RSF DM PMM Business development Contents 1 Sensing concepts 2 Applications 3 Roadmap of products and system demo boards 4 High Accuracy 24GHz radar solution 5
Infineon 24GHz Radar Solution May 2017 PMM RSF DM PMM Business development Contents 1 Sensing concepts 2 Applications 3 Roadmap of products and system demo boards 4 High Accuracy 24GHz radar solution 5
Immersive and Non-Immersive VR Environments: A Preliminary EEG Investigation 没入型および非没入型 VR 環境 :EEG の比較. Herchel Thaddeus Machacon.
 Immersive and Non-Immersive VR Environments: A Preliminary EEG Investigation 没入型および非没入型 VR 環境 :EEG の比較 Herchel Thaddeus Machacon Abstract Studies have attested to the potential of both immersive and non-immersive
Immersive and Non-Immersive VR Environments: A Preliminary EEG Investigation 没入型および非没入型 VR 環境 :EEG の比較 Herchel Thaddeus Machacon Abstract Studies have attested to the potential of both immersive and non-immersive
23 May 2018, Galveson, TX Science of Team Science 2018 Conference Ge WANG 1,3 and Ken-ichi SATO 2,3
 A HATENATHON Approach Report on Promoting SciTS in Japan 23 May 2018, Galveson, TX Science of Team Science 2018 Conference Ge WANG 1,3 and Ken-ichi SATO 2,3 1 Research Institute of Science and Technology
A HATENATHON Approach Report on Promoting SciTS in Japan 23 May 2018, Galveson, TX Science of Team Science 2018 Conference Ge WANG 1,3 and Ken-ichi SATO 2,3 1 Research Institute of Science and Technology
Omochi rabbit amigurumi pattern
 Omochi rabbit amigurumi pattern うさぎのあみぐるみ Materials Yarn: 1 main color (MC) and 1 contrasting color (CC), as needed. You can make this rabbit toy with any yarn weight, but the yarn colors used per one
Omochi rabbit amigurumi pattern うさぎのあみぐるみ Materials Yarn: 1 main color (MC) and 1 contrasting color (CC), as needed. You can make this rabbit toy with any yarn weight, but the yarn colors used per one
CG Image Generation of Four-Dimensional Origami 4 次元折り紙の CG 画像生成
 CG Image Generation of Four-Dimensional Origami Akira Inoue Ryouko Itohara Kuniaki Yajima Keimei Kaino Sendai National College of Technology yajima@cc.sendai-ct.ac.jp kaino@cc.sendai-ct.ac.jp Abstract
CG Image Generation of Four-Dimensional Origami Akira Inoue Ryouko Itohara Kuniaki Yajima Keimei Kaino Sendai National College of Technology yajima@cc.sendai-ct.ac.jp kaino@cc.sendai-ct.ac.jp Abstract
Magellan Systems Japan, Inc.
 Magellan Systems Japan, Inc. MSJ Company Overview and Tech Information. EU-JPN GNSS Week, 2017 Revision 2.0 Company Profile Profile (Company Profile) Our Location:7-1-3, Doicho, Amagasaki, Hyogo, 660-0083,
Magellan Systems Japan, Inc. MSJ Company Overview and Tech Information. EU-JPN GNSS Week, 2017 Revision 2.0 Company Profile Profile (Company Profile) Our Location:7-1-3, Doicho, Amagasaki, Hyogo, 660-0083,
科学研究費助成事業 ( 科学研究費補助金 ) 研究成果報告書
 研究成果報告書") 様式 C-19 科学研究費助成事業 ( 科学研究費補助金 ) 研究成果報告書 機関番号 :13302 研究種目 : 基盤研究 (C) 研究期間 :2010~2012 課題番号 :22560367 研究課題名 ( 和文 )CODE-SWAN 平成 25 年 5 月 30 日現在 研究課題名 ( 英文 )COoperative DEcision making based on Slepian-Wolf/multiple
様式 C-19 科学研究費助成事業 ( 科学研究費補助金 ) 研究成果報告書 機関番号 :13302 研究種目 : 基盤研究 (C) 研究期間 :2010~2012 課題番号 :22560367 研究課題名 ( 和文 )CODE-SWAN 平成 25 年 5 月 30 日現在 研究課題名 ( 英文 )COoperative DEcision making based on Slepian-Wolf/multiple
CER7027B / CER7032B / CER7042B / CER7042BA / CER7052B CER8042B / CER8065B CER1042B / CER1065B CER1242B / CER1257B / CER1277B
 一般機器用 For Consumer Products 汎用パワーインダクタ Common Power Inductors CER-B series RoHS CER727B / CER732B / CER742B / CER742BA / CER752B CER842B / CER865B CER42B / CER65B CER242B / CER257B / CER277B 特徴 DC-DC コンバータ用インダクタとして最適
一般機器用 For Consumer Products 汎用パワーインダクタ Common Power Inductors CER-B series RoHS CER727B / CER732B / CER742B / CER742BA / CER752B CER842B / CER865B CER42B / CER65B CER242B / CER257B / CER277B 特徴 DC-DC コンバータ用インダクタとして最適
博士学位論文. Doctoral Thesis 内容の要旨 審査結果の要旨. Thesis Abstracts and Summaries of the Thesis Review Results. The Twelfth Issue. The University of Aizu
 博士学位論文 Doctoral Thesis 内容の要旨 及び 審査結果の要旨 Thesis Abstracts and Summaries of the Thesis Review Results 第 12 号 The Twelfth Issue 平成 20 年 12 月 December, 2008 The University of Aizu はしがき 博士の学位を授与したので 学位規則 (
博士学位論文 Doctoral Thesis 内容の要旨 及び 審査結果の要旨 Thesis Abstracts and Summaries of the Thesis Review Results 第 12 号 The Twelfth Issue 平成 20 年 12 月 December, 2008 The University of Aizu はしがき 博士の学位を授与したので 学位規則 (
The seven pillars of Data Science
 2016 年度統計関連学会連合大会金沢大学 2016 年 9 月 6-9 日 The seven pillars of Data Science Hideyasu SHIMADZU Department of Mathematical Sciences and Centre for Data Science, Loughborough University, UK Big Data Google Trends
2016 年度統計関連学会連合大会金沢大学 2016 年 9 月 6-9 日 The seven pillars of Data Science Hideyasu SHIMADZU Department of Mathematical Sciences and Centre for Data Science, Loughborough University, UK Big Data Google Trends
Creation of Digital Archive of Japanese Products Design process
 Creation of Digital Archive of Japanese Products Design process Okamoto Rina Keio University Graduate School Policy and Media Course Program of Environmental Design Governance 1. Introduction: Background
Creation of Digital Archive of Japanese Products Design process Okamoto Rina Keio University Graduate School Policy and Media Course Program of Environmental Design Governance 1. Introduction: Background
Indonesian Printing Industry Trends, Current Technology, and Future Development
 46 総説 Indonesian Printing Industry Trends, Current Technology, and Future Development Adi Susanto*, Lie Liana* and Antono Adhi* *Departement of Printing Engineering and Management, University of Stikubank
46 総説 Indonesian Printing Industry Trends, Current Technology, and Future Development Adi Susanto*, Lie Liana* and Antono Adhi* *Departement of Printing Engineering and Management, University of Stikubank
Decisions in games Minimax algorithm α-β algorithm Tic-Tac-Toe game
 Decisions in games Minimax algorithm α-β algorithm Tic-Tac-Toe game 1 Games Othello Chess TicTacToe 2 Games as search problems Game playing is one of the oldest areas of endeavor in AI. What makes games
Decisions in games Minimax algorithm α-β algorithm Tic-Tac-Toe game 1 Games Othello Chess TicTacToe 2 Games as search problems Game playing is one of the oldest areas of endeavor in AI. What makes games
M. Khosarvy, M.R. Asharif, K. Yamashita, AN EFFICIENT ICA BASED APPROACH Multi-Carrier System, Vol. 41, pp.47-56, 2009
 平成 21 年度研究業績 (2009 年 4 月 ~2010 年 3 月 ) 情報工学科 論文 著書 Mohammad Hosntalab, Reza Aghaeizadeh Zoroofi, Ali Abbaspour Tehrani-Fard, Gholamreza Shirani, Mohammad Reza Asharif, Automated Extraction of Dental Arch
平成 21 年度研究業績 (2009 年 4 月 ~2010 年 3 月 ) 情報工学科 論文 著書 Mohammad Hosntalab, Reza Aghaeizadeh Zoroofi, Ali Abbaspour Tehrani-Fard, Gholamreza Shirani, Mohammad Reza Asharif, Automated Extraction of Dental Arch
情Propagation Characteristics of 700MHz Band V2X Wireless Communication*
 DENSO TECHNCAL REVEW Vol.21 2016 情Propagation Characteristics of 700Hz Band V2X Wireless Communication* Yasumune YUKZAK Yuji SUGOTO Tadao SUZUK n recent years, vehicle to vehicle and vehicle to infrastructure
DENSO TECHNCAL REVEW Vol.21 2016 情Propagation Characteristics of 700Hz Band V2X Wireless Communication* Yasumune YUKZAK Yuji SUGOTO Tadao SUZUK n recent years, vehicle to vehicle and vehicle to infrastructure
車載カメラにおける信号機認識および危険運転イベント検知 Traffic Light Recognition and Detection of Dangerous Driving Events from Surveillance Video of Vehicle Camera
 車載カメラにおける信号機認識および危険運転イベント検知 Traffic Light Recognition and Detection of Dangerous Driving Events from Surveillance Video of Vehicle Camera * 関海克 * 笠原亮介 * 矢野友章 Haike GUAN Ryosuke KASAHARA Tomoaki YANO 要旨
車載カメラにおける信号機認識および危険運転イベント検知 Traffic Light Recognition and Detection of Dangerous Driving Events from Surveillance Video of Vehicle Camera * 関海克 * 笠原亮介 * 矢野友章 Haike GUAN Ryosuke KASAHARA Tomoaki YANO 要旨
Toward a new era of EU-Japan cooperation in Robotics: rationale and objectives
 Research and Innovation in Robotics: New Opportunities for EU-Japan Cooperation The coming super-aged societies 2014.06.11 Toward a new era of EU-Japan cooperation in Robotics: rationale and objectives
Research and Innovation in Robotics: New Opportunities for EU-Japan Cooperation The coming super-aged societies 2014.06.11 Toward a new era of EU-Japan cooperation in Robotics: rationale and objectives
Effective Utilization of Patent Information in Japanese global companies
 Effective Utilization of Patent Information in Japanese global companies ATIS (Association of Technical Information Services) Member: IHI Corporation Intellectual property Dept. IP STRATEGY G. ATSUSHI
Effective Utilization of Patent Information in Japanese global companies ATIS (Association of Technical Information Services) Member: IHI Corporation Intellectual property Dept. IP STRATEGY G. ATSUSHI
ICTを活用した英語アカデミック ライティング指導 Title : 支援ツールの開発と実践 水本, 篤, 染谷, 泰正, 山本, 敏幸, 浜谷, 佐和子, Author(s) 小山, 由紀江, 近藤, 悠介, 今尾, 康裕, 大野, 真澄, 濱地, 亮太, 名部井, 敏代, 山西, 博之
 小山, 由紀江, 近藤, 悠介, 今尾, 康裕, 大野, 真澄, 濱地, 亮太, 名部井, 敏代, 山西, 博之") ICTを活用した英語アカデミック ライティング指導 Title : 支援ツールの開発と実践 Author(s) 小山, 由紀江, 近藤, 悠介, 今尾, 康裕, 大野, 真澄 Citation 水本, 篤, 染谷, 泰正, 山本, 敏幸, 浜谷, 佐和子,, 濱地, 亮太, 名部井, 敏代, 山西, 博之 Issue Date 2017-03 URL http://hdl.handle.net/10112/11019
ICTを活用した英語アカデミック ライティング指導 Title : 支援ツールの開発と実践 Author(s) 小山, 由紀江, 近藤, 悠介, 今尾, 康裕, 大野, 真澄 Citation 水本, 篤, 染谷, 泰正, 山本, 敏幸, 浜谷, 佐和子,, 濱地, 亮太, 名部井, 敏代, 山西, 博之 Issue Date 2017-03 URL http://hdl.handle.net/10112/11019
 Application Period : Call for applicants to the 10th International MANGA Award Guideline for aplication will be available at the following website and facebook page: www.manga-award.jp http://facebook.com/manga.award
Application Period : Call for applicants to the 10th International MANGA Award Guideline for aplication will be available at the following website and facebook page: www.manga-award.jp http://facebook.com/manga.award
MEG II 実験液体キセノン検出器実機 MPPC のコミッショニング. Commissioning of all MPPCs for MEG II LXe detector 小川真治 他 MEG II 日本物理学会 2017 年秋季大会
 1 MEG II 実験液体キセノン検出器実機 MPPC のコミッショニング Commissioning of all MPPCs for MEG II LXe detector 小川真治 他 MEG II コラボレーション @ 日本物理学会 217 年秋季大会 217.9.13 Table of contents 2 1. Introduction 2. MPPC commissioning 3.
1 MEG II 実験液体キセノン検出器実機 MPPC のコミッショニング Commissioning of all MPPCs for MEG II LXe detector 小川真治 他 MEG II コラボレーション @ 日本物理学会 217 年秋季大会 217.9.13 Table of contents 2 1. Introduction 2. MPPC commissioning 3.
記号 / 定格 /Ratings. B. 電気的特性 /Electrical Characteristics 測定条件 /Measure Condition (Tc = 25 ±3 ) 記号 / 測定条件 /Measure Condition
 記号 / 測定条件 /Measure Condition") 種別 /Type 用途 /Application 構造 /Structure シリコン MOS 形集積回路 /Silicon MOSFET Type Integrated Circuit スイッチング電源制御用 /For a Switching Power Supply Control CMOS 形 /CMOS Type 等価回路 /Equivalent Circuit 添付図 /See Figure
種別 /Type 用途 /Application 構造 /Structure シリコン MOS 形集積回路 /Silicon MOSFET Type Integrated Circuit スイッチング電源制御用 /For a Switching Power Supply Control CMOS 形 /CMOS Type 等価回路 /Equivalent Circuit 添付図 /See Figure
P (o w) P (o s) s = speaker. w = word. Independence bet. phonemes and pitch. Insensitivity to phase differences. phase characteristics
 P (o s) s = speaker. w = word. Independence bet. phonemes and pitch. Insensitivity to phase differences. phase characteristics") Independence bet. phonemes and pitch 0 0 0 0 0 0 0 0 0 0 "A_a_512" 0 5 10 15 20 25 30 35 speech waveforms Insensitivity to phase differences phase characteristics amplitude characteristics source characteristics
Independence bet. phonemes and pitch 0 0 0 0 0 0 0 0 0 0 "A_a_512" 0 5 10 15 20 25 30 35 speech waveforms Insensitivity to phase differences phase characteristics amplitude characteristics source characteristics
[ 言語情報科学論 A] 統計的言語モデル,N-grams
![[ 言語情報科学論 A] 統計的言語モデル,N-grams](/thumbs/95/125116938.jpg "[ 言語情報科学論 A] 統計的言語モデル,N-grams") [ 言語情報科学論 A] 統計的言語モデル -grams 2007 年 04 月 23 日 言語情報科学講座林良彦教授 Text: Courtesy of Dr. Jurafsky D. ad Dr. Marti J.H: Speech ad Laguage rocessig st editio retice Hall 2000 & 2 d editio http://.cs.colorado.edu/~marti/slp2.html
[ 言語情報科学論 A] 統計的言語モデル -grams 2007 年 04 月 23 日 言語情報科学講座林良彦教授 Text: Courtesy of Dr. Jurafsky D. ad Dr. Marti J.H: Speech ad Laguage rocessig st editio retice Hall 2000 & 2 d editio http://.cs.colorado.edu/~marti/slp2.html
Simple Utility-Interactive Photovoltaic Power Conditioners Installed in Veranda of Apartment Houses
 Journal of the Japan Institute of Energy, 94, 571-575(2015) 571 Special articles: Grand Renewable Energy 2014 特集 : 再生可能エネルギー 2014 Simple Utility-Interactive Photovoltaic Power Conditioners Installed in
Journal of the Japan Institute of Energy, 94, 571-575(2015) 571 Special articles: Grand Renewable Energy 2014 特集 : 再生可能エネルギー 2014 Simple Utility-Interactive Photovoltaic Power Conditioners Installed in
研究開発評価に関する国際的な視点や国際動向
 第 1 部 文部科学省平成 28 年度研究開発評価シンポジウム 大綱的指針の改定を踏まえた新しい研究開発評価へ向けて 講演 : 国の研究開発評価に関する大綱的指針 を踏まえた研究開発評価の推進について 研究開発評価に関する国際的な視点や国際動向 東京, 全日通霞が関ビルディング 8 階大会議室 2017 年 3 月 22 日 伊地知寛博 *1 *1 成城大学社会イノベーション学部教授 アウトライン
第 1 部 文部科学省平成 28 年度研究開発評価シンポジウム 大綱的指針の改定を踏まえた新しい研究開発評価へ向けて 講演 : 国の研究開発評価に関する大綱的指針 を踏まえた研究開発評価の推進について 研究開発評価に関する国際的な視点や国際動向 東京, 全日通霞が関ビルディング 8 階大会議室 2017 年 3 月 22 日 伊地知寛博 *1 *1 成城大学社会イノベーション学部教授 アウトライン
1~ 27 頁 機械システム工学科 29~ 56 頁 電気電子工学科 57~ 75 頁 情報システム工学科 77~ 98 頁 化学システム工学科 99~127 頁 機能材料工学科 129~162 頁 土木開発工学科 163~173 頁 共通講座 175~180 頁 機器分析センター
 目 次 機械システム工学科 1~ 27 頁 電気電子工学科 29~ 56 頁 情報システム工学科 57~ 75 頁 化学システム工学科 77~ 98 頁 機能材料工学科 99~127 頁 土木開発工学科 129~162 頁 共通講座 163~173 頁 機器分析センター 175~180 頁 未利用エネルギー研究センター 181~188 頁 情報処理センター 189 頁 国際交流センター 191~193
目 次 機械システム工学科 1~ 27 頁 電気電子工学科 29~ 56 頁 情報システム工学科 57~ 75 頁 化学システム工学科 77~ 98 頁 機能材料工学科 99~127 頁 土木開発工学科 129~162 頁 共通講座 163~173 頁 機器分析センター 175~180 頁 未利用エネルギー研究センター 181~188 頁 情報処理センター 189 頁 国際交流センター 191~193
D80 を使用したオペレーション GSL システム周波数特性 アンプコントローラー設定. Arc 及びLine 設定ラインアレイスピーカーを2 から7 までの傾斜角度に湾曲したアレイセクションで使用する場合 Arcモードを用います Lineモード
 D8 を使用したオペレーション GSL システム周波数特性 アンプコントローラー設定 Arc 及びLine 設定ラインアレイスピーカーを2 から7 までの傾斜角度に湾曲したアレイセクションで使用する場合 Arcモードを用います Lineモード アンプ1 台あたりの最大スピーカー数 SL-SUB SL-GSUB - - - - は 3つ以上の連続した から1 までの傾斜設定のロングスローアレイセクションで使用する場合に用います
D8 を使用したオペレーション GSL システム周波数特性 アンプコントローラー設定 Arc 及びLine 設定ラインアレイスピーカーを2 から7 までの傾斜角度に湾曲したアレイセクションで使用する場合 Arcモードを用います Lineモード アンプ1 台あたりの最大スピーカー数 SL-SUB SL-GSUB - - - - は 3つ以上の連続した から1 までの傾斜設定のロングスローアレイセクションで使用する場合に用います
レーダー流星ヘッドエコー DB 作成グループ (murmhed at nipr.ac.jp) 本規定は レーダー流星ヘッドエコー DB 作成グループの作成した MU レーダー流星ヘッド エコーデータベース ( 以下 本データベース ) の利用方法を定めるものである
 本規定は レーダー流星ヘッドエコー DB 作成グループの作成した MU レーダー流星ヘッド エコーデータベース ( 以下 本データベース ) の利用方法を定めるものである") Page 1-3: Japanese, Page 4-6: English MU レーダー流星ヘッドエコーデータベース (MURMHED) 利用規定 平成 26 年 4 月 1 日, 27 年 5 月 31 日改定 B レーダー流星ヘッドエコー DB 作成グループ (murmhed at nipr.ac.jp) 本規定は レーダー流星ヘッドエコー DB 作成グループの作成した MU レーダー流星ヘッド
Page 1-3: Japanese, Page 4-6: English MU レーダー流星ヘッドエコーデータベース (MURMHED) 利用規定 平成 26 年 4 月 1 日, 27 年 5 月 31 日改定 B レーダー流星ヘッドエコー DB 作成グループ (murmhed at nipr.ac.jp) 本規定は レーダー流星ヘッドエコー DB 作成グループの作成した MU レーダー流星ヘッド
パーコレーションモデルを用いた二次元液滴群の燃え広がり特性に関する検討. A study on flame-spread characteristics of two-dimensional droplet cloud using percolation model
 28A01 パーコレーションモデルを用いた二次元液滴群の燃え広がり特性に関する検討 瀬尾健彦,Herman Saputro, 三上真人 ( 山口大 ), 菊池政雄 (JAXA) A study on flame-spread characteristics of two-dimensional droplet cloud using percolation model Takehiko SEO, Herman
28A01 パーコレーションモデルを用いた二次元液滴群の燃え広がり特性に関する検討 瀬尾健彦,Herman Saputro, 三上真人 ( 山口大 ), 菊池政雄 (JAXA) A study on flame-spread characteristics of two-dimensional droplet cloud using percolation model Takehiko SEO, Herman
SS 32. October 12, Yuji NAKAKITA. Land Mobile Communications Division, Radio Department Ministry of Internal Affairs and Communications, Japan
 SS 32 October 12, 2007 Yuji NAKAKITA Land Mobile Communications Division, Radio Department Ministry of Internal Affairs and Communications, Japan ITS for Safety and Security Overview Vehicle-to-Vehicle
SS 32 October 12, 2007 Yuji NAKAKITA Land Mobile Communications Division, Radio Department Ministry of Internal Affairs and Communications, Japan ITS for Safety and Security Overview Vehicle-to-Vehicle
IEEE. s Magazine 電子情報通信学会誌 電気学会誌第 123 巻 4 号 年 4 月. IEEE Photonics Tech. Lett.,
 教員業績報告 ( 初期入力様式 ) 所属学部 学科 工学部 情報システム学科 氏名 ( 漢字 ) 青木恭弘 氏名 ( ローマ字 ) Yasuhiro Aoki 職位 教授 学位 工学博士 1. 学術論文 (Original Papers) 番号 単著 / 共著 著者 (authors) 題名 (title) 掲載誌 (journal) 巻 号 (vol, no.) ページ (pages) 発行年月
教員業績報告 ( 初期入力様式 ) 所属学部 学科 工学部 情報システム学科 氏名 ( 漢字 ) 青木恭弘 氏名 ( ローマ字 ) Yasuhiro Aoki 職位 教授 学位 工学博士 1. 学術論文 (Original Papers) 番号 単著 / 共著 著者 (authors) 題名 (title) 掲載誌 (journal) 巻 号 (vol, no.) ページ (pages) 発行年月
HAND-SHAPED INTERFACE FOR INTUITIVE HUMAN- ROBOT COMMUNICATION THROUGH HAPTIC MEDIA
 HAND-SHAPED INTERFACE FOR INTUITIVE HUMAN- ROBOT COMMUNICATION THROUGH HAPTIC MEDIA RIKU HIKIJI AND SHUJI HASHIMOTO Department of Applied Physics, School of Science and Engineering, Waseda University 3-4-1
HAND-SHAPED INTERFACE FOR INTUITIVE HUMAN- ROBOT COMMUNICATION THROUGH HAPTIC MEDIA RIKU HIKIJI AND SHUJI HASHIMOTO Department of Applied Physics, School of Science and Engineering, Waseda University 3-4-1
特集 米国におけるコンシューマ向けブロードバンド衛星サービスの現状
 特集 米国におけるコンシューマ向けブロードバンド衛星サービスの現状 編集部よりのコメント : JGB Consult, LLC ジェームズバイチマン氏 この資料は 2007 年 11 月にハワイにて開催された JUSTSAP( 日米科学技術宇宙応用プログラム ) シンポジウムにおいてバイチマン氏が発表されたものをご本人に了解を得て掲載するものです 会議後の一部修正と説明用のノートをご本人に加えていただきました
特集 米国におけるコンシューマ向けブロードバンド衛星サービスの現状 編集部よりのコメント : JGB Consult, LLC ジェームズバイチマン氏 この資料は 2007 年 11 月にハワイにて開催された JUSTSAP( 日米科学技術宇宙応用プログラム ) シンポジウムにおいてバイチマン氏が発表されたものをご本人に了解を得て掲載するものです 会議後の一部修正と説明用のノートをご本人に加えていただきました
L1 Cultures Go Around the World
 L1 Cultures Go Around the World Part 1 Do you know/ the number of countries/ in the world?// Today,/ more than 190 countries are/ numbers of the United Nations.// What about the numbers of people?// About
L1 Cultures Go Around the World Part 1 Do you know/ the number of countries/ in the world?// Today,/ more than 190 countries are/ numbers of the United Nations.// What about the numbers of people?// About
Chapter 4 Radio Communication Basics
 Chapter 4 Radio Communication Basics Chapter 4 Radio Communication Basics RF Spectrum RF Spectrum Infrared (3-400THz): far(3-30), middle(30-120), near(120-400) Visible light (400-800THz) RF: Radio Frequency
Chapter 4 Radio Communication Basics Chapter 4 Radio Communication Basics RF Spectrum RF Spectrum Infrared (3-400THz): far(3-30), middle(30-120), near(120-400) Visible light (400-800THz) RF: Radio Frequency
U N I T. 1. What are Maxine and Debbie talking about? They are talking about. 2. What doesn t Maxine like? She doesn t like. 3. What is a shame?
 1. Conversation: U N I T 1. What are Maxine and Debbie talking about? They are talking about 2. What doesn t Maxine like? She doesn t like 3. What is a shame? 4. Whose fault is it and why? 5. What did
1. Conversation: U N I T 1. What are Maxine and Debbie talking about? They are talking about 2. What doesn t Maxine like? She doesn t like 3. What is a shame? 4. Whose fault is it and why? 5. What did
l Reef in Ishigaki Island- Author(s) a, Tanouchi, Hiroki, Nasu, Seigo
 a, Tanouchi, Hiroki, Nasu, Seigo") Kochi University of Technology Aca Social Simulation with Logic Mode Title Application on Farmer's Behavior l Reef in Ishigaki Island- Konohira, Syunya, Maeda, Shinichi Author(s) a, Tanouchi, Hiroki, Nasu,
Kochi University of Technology Aca Social Simulation with Logic Mode Title Application on Farmer's Behavior l Reef in Ishigaki Island- Konohira, Syunya, Maeda, Shinichi Author(s) a, Tanouchi, Hiroki, Nasu,
Installation Manual WIND TRANSDUCER
 Installation Manual WIND TRANSDUCER Model FI-5001/FI-5001L This manual provides the instructions for how to install the Wind Transducer FI-5001/FI- 5001L. For connection to the instrument, see the operator
Installation Manual WIND TRANSDUCER Model FI-5001/FI-5001L This manual provides the instructions for how to install the Wind Transducer FI-5001/FI- 5001L. For connection to the instrument, see the operator
Electrical Engineering
 Electrical Engineering Educational Objectives This major aims to cultivate well-grounded, practical, creative and all-round research talents who are well developed in morality, intelligence and physical
Electrical Engineering Educational Objectives This major aims to cultivate well-grounded, practical, creative and all-round research talents who are well developed in morality, intelligence and physical
Title of the body. Citation. Issue Date Conference Paper. Text version author. Right
 Title Author(s) Development of the tool for artisti of the body Sakurazawa, Shigeru; Akita, Junichi Citation Issue Date 2006 Type Conference Paper Text version author URL http://hdl.handle.net/2297/6895
Title Author(s) Development of the tool for artisti of the body Sakurazawa, Shigeru; Akita, Junichi Citation Issue Date 2006 Type Conference Paper Text version author URL http://hdl.handle.net/2297/6895
日独学長シンポジウムと日仏高等教育改革シンポジウムが開催されました.
 日独学長シンポジウムと日仏高等教育改革シンポジウムが開催されました. 2016 年 6 月 28-29 日 ベルリンにて日独学長シンポジウム ( 以下 日独シンポ ) が 7 月 1 日 パリにて日仏 高等教育改革シンポジウム ( 以下 日仏シンポ ) が開催され 本学からは山口宏樹学長が参加しました 日独シンポ会場のベルリン日独センター 日仏シンポ会場のフランス大学長会議のある建物 日独シンポ *
日独学長シンポジウムと日仏高等教育改革シンポジウムが開催されました. 2016 年 6 月 28-29 日 ベルリンにて日独学長シンポジウム ( 以下 日独シンポ ) が 7 月 1 日 パリにて日仏 高等教育改革シンポジウム ( 以下 日仏シンポ ) が開催され 本学からは山口宏樹学長が参加しました 日独シンポ会場のベルリン日独センター 日仏シンポ会場のフランス大学長会議のある建物 日独シンポ *
4R and 5R Parallel Mechanism Mobile Robots
 4R and 5R Parallel Mechanism Mobile Robots Tasuku Yamawaki Department of Mechano-Micro Engineering Tokyo Institute of Technology 4259 Nagatsuta, Midoriku Yokohama, Kanagawa, Japan Email: d03yamawaki@pms.titech.ac.jp
4R and 5R Parallel Mechanism Mobile Robots Tasuku Yamawaki Department of Mechano-Micro Engineering Tokyo Institute of Technology 4259 Nagatsuta, Midoriku Yokohama, Kanagawa, Japan Email: d03yamawaki@pms.titech.ac.jp
Local Populations Facing Long- Term Consequences of Nuclear Accidents: Lessons learned from Chernobyl and Fukushima
 Fukushima Global Communication Programme Working Paper Series Number 17 December 2015 Local Populations Facing Long- Term Consequences of Nuclear Accidents: Lessons learned from Chernobyl and Fukushima
Fukushima Global Communication Programme Working Paper Series Number 17 December 2015 Local Populations Facing Long- Term Consequences of Nuclear Accidents: Lessons learned from Chernobyl and Fukushima
Design and Control of the BUAA Four-Fingered Hand
 Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Design and Control of the BUAA Four-Fingered Hand Y. Zhang, Z. Han, H. Zhang, X. Shang, T. Wang,
Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Design and Control of the BUAA Four-Fingered Hand Y. Zhang, Z. Han, H. Zhang, X. Shang, T. Wang,
Report on the current state of Japanese University Rocket Projects
 Report on the current state of Japanese University Rocket Projects Second Edition October 2012-1 - - 2 - Report on the current state of Japanese University Rocket Projects October 2012 -(ii) 3 - -(iii)
Report on the current state of Japanese University Rocket Projects Second Edition October 2012-1 - - 2 - Report on the current state of Japanese University Rocket Projects October 2012 -(ii) 3 - -(iii)
Development of a pixel sensor based on SOI technology for the ILC vertex detector
 Development of a pixel sensor based on SOI technology for the ILC vertex detector Linear Collider Workshop 2015 (LCWS15) 2015/11/3 @Canada Whistler Shun Ono (Osaka University) s-ono@champ.hep.sci.osaka-u.ac.jp
Development of a pixel sensor based on SOI technology for the ILC vertex detector Linear Collider Workshop 2015 (LCWS15) 2015/11/3 @Canada Whistler Shun Ono (Osaka University) s-ono@champ.hep.sci.osaka-u.ac.jp
相関語句 ( 定型のようになっている語句 ) の表現 1. A is to B what C is to D. A と B の関係は C と D の関係に等しい Leaves are to the plant what lungs are to the animal.
 の表現 1. A is to B what C is to D. A と B の関係は C と D の関係に等しい Leaves are to the plant what lungs are to the animal.") 相関語句 ( 定型のようになっている語句 ) の表現 1. A is to B what C is to D. A と B の関係は C と D の関係に等しい Leaves are to the plant what lungs are to the animal. 2. above ~ing ~ することを恥と思う He is above telling a lie. 3. all+ 抽象名詞きわめて
相関語句 ( 定型のようになっている語句 ) の表現 1. A is to B what C is to D. A と B の関係は C と D の関係に等しい Leaves are to the plant what lungs are to the animal. 2. above ~ing ~ することを恥と思う He is above telling a lie. 3. all+ 抽象名詞きわめて
Service Research and Innovation in Japan
 Service Research and Innovation in Japan Kazuyoshi Hidaka Professor of Graduate School of Innovation Management Tokyo Institute of Technology Chair of SRII Japan Chapter K.HIDAKA@TOKYO TECH 1 We live in
Service Research and Innovation in Japan Kazuyoshi Hidaka Professor of Graduate School of Innovation Management Tokyo Institute of Technology Chair of SRII Japan Chapter K.HIDAKA@TOKYO TECH 1 We live in
Study in Patent Risk and Countermeasures Related to Open Management in Interaction Design
 Received January 15, 2013; Accepted March 19, 2013 Study in Patent Risk and Countermeasures Related to Open Management in Interaction Design Sakai, Yosuke Yamaguchi Center for Arts and Media [YCAM] sakai@ycam.jp
Received January 15, 2013; Accepted March 19, 2013 Study in Patent Risk and Countermeasures Related to Open Management in Interaction Design Sakai, Yosuke Yamaguchi Center for Arts and Media [YCAM] sakai@ycam.jp
Information and Program
 Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
SciVal February 2016 release
 0 SciVal February 2016 release 1 Agenda Introduction Live demo new features in SciVal Q&A In this release: Understanding socio-economic impact 2 3 Our vision on the world of research 2 5 3 4 1 1 Scopus
0 SciVal February 2016 release 1 Agenda Introduction Live demo new features in SciVal Q&A In this release: Understanding socio-economic impact 2 3 Our vision on the world of research 2 5 3 4 1 1 Scopus
On Endings 終結について. Ted Goossen
 テッド グーセン < On Endings 終結について > On Endings 終結について Ted Goossen In January of 1974, at the age of 25, I sat down in a s m all roo m in Fushi m i Momoyama in Kyoto and began to teach myself to read Japanese.
テッド グーセン < On Endings 終結について > On Endings 終結について Ted Goossen In January of 1974, at the age of 25, I sat down in a s m all roo m in Fushi m i Momoyama in Kyoto and began to teach myself to read Japanese.
Image processing of the weld pool and tracking of the welding line in pulsed MAG welding *
 [ 溶接学会論文集第 33 巻第 2 号 p. 156s-16s (215)] Image processing of the weld pool and tracking of the welding line in pulsed MAG welding * by Satoshi Yamane**, Katsuhito Shirota***, Sota Tsukano*** and Da Lu Wang***
[ 溶接学会論文集第 33 巻第 2 号 p. 156s-16s (215)] Image processing of the weld pool and tracking of the welding line in pulsed MAG welding * by Satoshi Yamane**, Katsuhito Shirota***, Sota Tsukano*** and Da Lu Wang***
Keio University Global Innovator Accelera6on Program 2015 Day 7 Design Process Exercise
 この作品はクリエイティブ コモンズ 表示 - 継承 4.0 国際 ライセンスで提供されています This work is licensed under a Crea6ve Commons A:ribu6on- ShareAlike 4.0 Interna6onal License. EDGE Program funded by MEXT Keio University Global Innovator
この作品はクリエイティブ コモンズ 表示 - 継承 4.0 国際 ライセンスで提供されています This work is licensed under a Crea6ve Commons A:ribu6on- ShareAlike 4.0 Interna6onal License. EDGE Program funded by MEXT Keio University Global Innovator
CPM6018RA Datasheet 定電流モジュール. Constant-current Power Modules. TAMURA CORPORATION Rev.A May, / 15
 定電流モジュール Constant-current Power Modules 特徴 (Features) 1. ワールドワイド入力 :AC90 ~ 264V Input voltage range:ac90 ~ 264V 2. 外部抵抗により電流値の設定が可能 As output current can also be arbitrarily set by a resistor 3. 力率 :85%
定電流モジュール Constant-current Power Modules 特徴 (Features) 1. ワールドワイド入力 :AC90 ~ 264V Input voltage range:ac90 ~ 264V 2. 外部抵抗により電流値の設定が可能 As output current can also be arbitrarily set by a resistor 3. 力率 :85%
著書 1 中嶋信生, 有田武美, 携帯電話はなぜつながるのか, 日経 BP 社,Jul 学術論文 1 Y. Karasawa, Innovative Antennas and Propagation Studies for MIMO Systems, 4.
 4. 外部発表 (2007 年度 ) 著書 1 中嶋信生, 有田武美, 携帯電話はなぜつながるのか, 日経 BP 社,Jul.2007. 2 学振 131 委員会編, 本城和彦他, 薄膜ハンドブック ( 第 2 版 ), オーム社,pp.680-683, 3 野島俊雄, 山尾泰, 高野健, 伊東健治, 楢橋祥一, モバイル通信の無線回路技術, 電子情報通信学会,Sep.2007. 学術論文 1 Y.
4. 外部発表 (2007 年度 ) 著書 1 中嶋信生, 有田武美, 携帯電話はなぜつながるのか, 日経 BP 社,Jul.2007. 2 学振 131 委員会編, 本城和彦他, 薄膜ハンドブック ( 第 2 版 ), オーム社,pp.680-683, 3 野島俊雄, 山尾泰, 高野健, 伊東健治, 楢橋祥一, モバイル通信の無線回路技術, 電子情報通信学会,Sep.2007. 学術論文 1 Y.
V-TUNE ~CCT Controllable~
 TUE ~CCT Controllable~ Specification Product ame Model o. VT0750XXA (750mm) TUE (Apprx.14W/meter at maximum output) VT0380XXA (380mm) VT1120XXA (1120mm) Builttoorder Input Voltage Power Consumption 10.6W
TUE ~CCT Controllable~ Specification Product ame Model o. VT0750XXA (750mm) TUE (Apprx.14W/meter at maximum output) VT0380XXA (380mm) VT1120XXA (1120mm) Builttoorder Input Voltage Power Consumption 10.6W
国際会議 ACM CHI ( ) HCI で生まれた研究例 2012/10/3 人とコンピュータの相互作用 WHAT IS HCI? (Human-Computer Interaction (HCI)
 HCI で生まれた研究例 2012/10/3 人とコンピュータの相互作用 WHAT IS HCI? (Human-Computer Interaction (HCI)") 人とコンピュータの相互作用 (- Interaction (HCI) - 研究の最前線 - 任向実高知工科大学情報学群 WHAT IS HCI? 2 HCI で生まれた研究例 GUI (Graphical User Interface) PCの普及 Webの普及 J. C. R. Licklider (1960). Man- Symbiosis, Transactions on Factors in
人とコンピュータの相互作用 (- Interaction (HCI) - 研究の最前線 - 任向実高知工科大学情報学群 WHAT IS HCI? 2 HCI で生まれた研究例 GUI (Graphical User Interface) PCの普及 Webの普及 J. C. R. Licklider (1960). Man- Symbiosis, Transactions on Factors in
東北大学におけるデータベースの現状 東北大学観測チーム 八木学 小原隆博 熊本篤志 土屋史紀 鍵谷将人 米田瑞生 三澤浩昭 寺田直樹 笠羽康正 佐藤慎也 岩井一正 NICT 大矢浩代 千葉大
 東北大学におけるデータベースの現状 東北大学観測チーム 八木学 小原隆博 熊本篤志 土屋史紀 鍵谷将人 米田瑞生 三澤浩昭 寺田直樹 笠羽康正 佐藤慎也 岩井一正 NICT 大矢浩代 千葉大 Acknowledgement This work is supported by Dr. Cecconi (Obspm, France) to develop Virtual Observatory for
東北大学におけるデータベースの現状 東北大学観測チーム 八木学 小原隆博 熊本篤志 土屋史紀 鍵谷将人 米田瑞生 三澤浩昭 寺田直樹 笠羽康正 佐藤慎也 岩井一正 NICT 大矢浩代 千葉大 Acknowledgement This work is supported by Dr. Cecconi (Obspm, France) to develop Virtual Observatory for
Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free Human Following Navigation in Outdoor Environment
 Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
修士 / 博士課程専門課題 Ⅱ 試験問題
 平成 30 年度 東京大学大学院工学系研究科建築学専攻 修士 / 博士課程専門課題 Ⅱ 試験問題 第 1 群 ( 設計 ) 平成 29 年 8 月 30 日 ( 水 ) 4 時間 (9:00 13:00) THE UNIVERSITY OF TOKYO Graduate School of Engineering Department of Architecture QUESTION BOOKLET
平成 30 年度 東京大学大学院工学系研究科建築学専攻 修士 / 博士課程専門課題 Ⅱ 試験問題 第 1 群 ( 設計 ) 平成 29 年 8 月 30 日 ( 水 ) 4 時間 (9:00 13:00) THE UNIVERSITY OF TOKYO Graduate School of Engineering Department of Architecture QUESTION BOOKLET
Global Standards Collaboration (GSC) 14. ITS Radiocommunication Systems in Japan
 14. ITS Radiocommunication Systems in Japan") Global Standards Collaboration (GSC) 14 DOCUMENT #: FOR: SOURCE: AGENDA ITEM: CONTACT(S): GSC14-PLEN-nn Presentation ARIB 6.6 t-yamamoto@bu.jp.nec.com ITS Radiocommunication Systems in Japan Vehicle-to-Vehicle
Global Standards Collaboration (GSC) 14 DOCUMENT #: FOR: SOURCE: AGENDA ITEM: CONTACT(S): GSC14-PLEN-nn Presentation ARIB 6.6 t-yamamoto@bu.jp.nec.com ITS Radiocommunication Systems in Japan Vehicle-to-Vehicle
Keio EDGE Program. Kane Ishibashi Project Assistant Professor, Graduate School of System Design and Management
 Keio EDGE Program Kane Ishibashi Project Assistant Professor, Graduate School of System and Management Keio EDGE Program 2015 Schedule September October November December Intensive Workshop Project Work
Keio EDGE Program Kane Ishibashi Project Assistant Professor, Graduate School of System and Management Keio EDGE Program 2015 Schedule September October November December Intensive Workshop Project Work
TDK Lambda A /9
 A265 58 0 /9 INDEX PAGE. 静電気放電イミュニティ試験 3 Electrostatic Discharge Immunity Test (IEC6000 4 2) 2. 放射性無線周波数電磁界イミュニティ試験 4 Radiated Radio Frequency Electromagnetic Field Immunity Test (IEC6000 4 3) 3. 電気的ファーストトランジェントバーストイミュニティ試験
A265 58 0 /9 INDEX PAGE. 静電気放電イミュニティ試験 3 Electrostatic Discharge Immunity Test (IEC6000 4 2) 2. 放射性無線周波数電磁界イミュニティ試験 4 Radiated Radio Frequency Electromagnetic Field Immunity Test (IEC6000 4 3) 3. 電気的ファーストトランジェントバーストイミュニティ試験
外国語作文 ( 英語 ) Foreign Language Essay (English)
 Foreign Language Essay (English)") 平成 22 年度 (2010 年度 ) 第 1 学年 4 月入学 第 2 学年 4 月編入学選抜検査 Spring Entrance Examination 2010 for 1 st and 2 nd Grade Applicants 外国語作文 ( 英語 ) Foreign Language Essay (English) 平成 22 年 (2010 年 )2 月 3 日 ( 水 ) 実施 Wednesday,
平成 22 年度 (2010 年度 ) 第 1 学年 4 月入学 第 2 学年 4 月編入学選抜検査 Spring Entrance Examination 2010 for 1 st and 2 nd Grade Applicants 外国語作文 ( 英語 ) Foreign Language Essay (English) 平成 22 年 (2010 年 )2 月 3 日 ( 水 ) 実施 Wednesday,
NINJA LASER INNOVATORS BY DESIGN SINCE 1770
 INNOVATORS BY DESIGN SINCE 1770 Ninja Laser combines the mechanical and electronic precision to guarantee unique key cutting performances and quality through two different technologies: a double speed
INNOVATORS BY DESIGN SINCE 1770 Ninja Laser combines the mechanical and electronic precision to guarantee unique key cutting performances and quality through two different technologies: a double speed
HARD LOCK Technical Reports
 PVP2006-ICPVT-11-93292 HARD LOCK Technical Reports Japanese & English Edition 2007 Vol. 2 軸直角方向繰返し荷重作用下でいくつかのゆるみ止部品を装着したボルト締結体のねじゆるみの実験的評価 ( 拡大版 ) EXPERIMENTAL EVALUATION OF SCREW THREAD LOOSENING IN BOLTED
PVP2006-ICPVT-11-93292 HARD LOCK Technical Reports Japanese & English Edition 2007 Vol. 2 軸直角方向繰返し荷重作用下でいくつかのゆるみ止部品を装着したボルト締結体のねじゆるみの実験的評価 ( 拡大版 ) EXPERIMENTAL EVALUATION OF SCREW THREAD LOOSENING IN BOLTED
電子回路論第 6 回 Electric Circuits for Physicists
 電子回路論第 6 回 Electric Circuits for Physicists 東京大学理学部 理学系研究科物性研究所勝本信吾 Shingo Katsumoto Outline 4.3 Feedback control 4.3.1 Disturbance and noise 4.3.2 PID control 4.4 PN junction transistors 4.4.1 Diodes
電子回路論第 6 回 Electric Circuits for Physicists 東京大学理学部 理学系研究科物性研究所勝本信吾 Shingo Katsumoto Outline 4.3 Feedback control 4.3.1 Disturbance and noise 4.3.2 PID control 4.4 PN junction transistors 4.4.1 Diodes
Onboard Antenna for 700 MHz Band V2X Communication *
 特 集 特集 Onboard Antenna for 700 MHz Band V2X Communication * 鈴木忠男 Tadao SUZUKI 杉本勇次 Yuji SUGIMOTO 溝口 幸 Miyuki MIZOGUCHI In recent years, vehicle to vehicle and vehicle to infrastructure wireless communication
特 集 特集 Onboard Antenna for 700 MHz Band V2X Communication * 鈴木忠男 Tadao SUZUKI 杉本勇次 Yuji SUGIMOTO 溝口 幸 Miyuki MIZOGUCHI In recent years, vehicle to vehicle and vehicle to infrastructure wireless communication
品名 :SCM1561M 製品仕様書. LF No RoHS 指令対応 RoHS Directive Compliance 発行年月日 仕様書番号 SSJ SANKEN ELECTRIC CO., LTD. 承認審査作成 サンケン電気株式会社技術本部 MCD 事業部
 製品仕様書 品名 : LF No. 2551 RoHS 指令対応 RoHS Directive Compliance 承認審査作成 Masahiro Sasaki Seiichi Funakura Yuya Maekawa サンケン電気株式会社技術本部 MCD 事業部 発行年月日 仕様書番号 2014/12/16 SSJ-04774 1 適用範囲 Scope この規格は 高圧三相モータドライバ IC
製品仕様書 品名 : LF No. 2551 RoHS 指令対応 RoHS Directive Compliance 承認審査作成 Masahiro Sasaki Seiichi Funakura Yuya Maekawa サンケン電気株式会社技術本部 MCD 事業部 発行年月日 仕様書番号 2014/12/16 SSJ-04774 1 適用範囲 Scope この規格は 高圧三相モータドライバ IC
Ⅲ. 研究成果の刊行に関する一覧表 発表者氏名論文タイトル名発表誌名巻号ページ出版年. lgo/kourogi_ pedestrian.p df. xed and Augmen ted Reality
 Ⅲ. 研究成果の刊行に関する一覧表 雑誌 発表者氏名論文タイトル名発表誌名巻号ページ出版年 M. Kourogi, T. Ish Pedestrian Dead Reckonin ISMAR2009 Workhttp://www.ihttps://www. 2009 ikawa, Y., J. Ishi g and its applications P shop: Let's Gocg.tugraz.aticg.tugraz.a
Ⅲ. 研究成果の刊行に関する一覧表 雑誌 発表者氏名論文タイトル名発表誌名巻号ページ出版年 M. Kourogi, T. Ish Pedestrian Dead Reckonin ISMAR2009 Workhttp://www.ihttps://www. 2009 ikawa, Y., J. Ishi g and its applications P shop: Let's Gocg.tugraz.aticg.tugraz.a
Hi Power DC Fan Motor 大型DCファン
 Hi Power DC Fan Motor 大型DCファン http://www.minebea.co.jp FAN Series Product Size (mm) AirFlow (CFM) Pressure (Pa) Sample R50 5075 544,550 Under Development R7 75 604,50 Under Development F60 6069 495,00
Hi Power DC Fan Motor 大型DCファン http://www.minebea.co.jp FAN Series Product Size (mm) AirFlow (CFM) Pressure (Pa) Sample R50 5075 544,550 Under Development R7 75 604,50 Under Development F60 6069 495,00
セイコー船舶用時計. SEIKO MARINE CLOCK SYSTEM QC-6M5 / QC-6M4 / MC Series / Chronometer
 セイコー船舶用時計 SEIKO MARINE CLOCK SYSTEM QC-6M5 / QC-6M4 / MC Series / Chronometer 長年の経験と実績をもとに正確さと信頼性を追求したセイコー船舶用時計 精密技術とエレクトロニクスの融合による高精度水晶時計です セイコー船舶用親時計 QC-6M5/QC-6M4 特長 1/ 高精度水晶時計 セイコー船舶用親時計 QC-6M5/QC-6M4は高精度な水晶を内蔵し
セイコー船舶用時計 SEIKO MARINE CLOCK SYSTEM QC-6M5 / QC-6M4 / MC Series / Chronometer 長年の経験と実績をもとに正確さと信頼性を追求したセイコー船舶用時計 精密技術とエレクトロニクスの融合による高精度水晶時計です セイコー船舶用親時計 QC-6M5/QC-6M4 特長 1/ 高精度水晶時計 セイコー船舶用親時計 QC-6M5/QC-6M4は高精度な水晶を内蔵し
Challenge for Analog Circuit Testing in Mixed-Signal SOC
 SEMICON Japan STS Test Session Dec. 2, 2010 Presentation file Challenge for Analog Circuit Testing in Mixed-Signal SOC Haruo Kobayashi Gunma University k_haruo@el.gunma-u.ac.jp 1 Contents 1. Introduction
SEMICON Japan STS Test Session Dec. 2, 2010 Presentation file Challenge for Analog Circuit Testing in Mixed-Signal SOC Haruo Kobayashi Gunma University k_haruo@el.gunma-u.ac.jp 1 Contents 1. Introduction
科学技術 学術審議会大型プロジェクト作業部会 2015 年 12 月 22 日 永野博
 資料 2 科学技術 学術審議会学術分科会研究環境基盤部会学術研究の大型プロジェクトに関する作業部会 ( 第 49 回 ) H27.12.22 ESFRI について ~ European Strategy Forum on Research Infrastructures ~ 科学技術 学術審議会大型プロジェクト作業部会 2015 年 12 月 22 日 OECD ク ローハ ルサイエンスフォーラム議長
資料 2 科学技術 学術審議会学術分科会研究環境基盤部会学術研究の大型プロジェクトに関する作業部会 ( 第 49 回 ) H27.12.22 ESFRI について ~ European Strategy Forum on Research Infrastructures ~ 科学技術 学術審議会大型プロジェクト作業部会 2015 年 12 月 22 日 OECD ク ローハ ルサイエンスフォーラム議長
artist Chim Pom Chim Pom (Ryuta Ushiro, Ellie)
") artist top (Ryuta Ushiro, Ellie) Copyright Aomi Okabe The artist group consists of 6 people since 2005 in Tokyo and all the Participants Musashino Art University, Department of Arts Policy and Management
artist top (Ryuta Ushiro, Ellie) Copyright Aomi Okabe The artist group consists of 6 people since 2005 in Tokyo and all the Participants Musashino Art University, Department of Arts Policy and Management
宇宙飛行生物学 (Bioastronautics( 宇宙飛行生物学 (Bioastronautics) の大学院教育への利用. Astrobiology)? 宇宙生物学 (Astrobiology( 宇宙生物学 カリキュラム詳細
 の大学院教育への利用. Astrobiology)? 宇宙生物学 (Astrobiology( 宇宙生物学 カリキュラム詳細") 宇宙飛行生物学 (Bioastronautics) の大学院教育への利用 東京女学館大学宮嶋宏行 2009.8.25 石川研究室輪講資料 宇宙生物学 (Astrobiology( Astrobiology)? 宇宙生物学 宇宙生物学 (Astrobiology( Astrobiology) ) とは地球に限らず 広く宇宙全体での生命体について考察し 生物生存の実態や生物現象のより普遍的な仕組み 生命の起源などを明らかにしようとする学問
宇宙飛行生物学 (Bioastronautics) の大学院教育への利用 東京女学館大学宮嶋宏行 2009.8.25 石川研究室輪講資料 宇宙生物学 (Astrobiology( Astrobiology)? 宇宙生物学 宇宙生物学 (Astrobiology( Astrobiology) ) とは地球に限らず 広く宇宙全体での生命体について考察し 生物生存の実態や生物現象のより普遍的な仕組み 生命の起源などを明らかにしようとする学問
SanjigenJiten : Game System for Acquiring New Languages Visually 三次元辞典 : 第二言語学習のためのゲームシステム. Robert Howland Emily Olmstead Junichi Hoshino
 SanjigenJiten : Game System for Acquiring New Languages Visually Robert Howland Emily Olmstead Junichi Hoshino Imagine being able to approach any object in the real world and instantly learn how to read
SanjigenJiten : Game System for Acquiring New Languages Visually Robert Howland Emily Olmstead Junichi Hoshino Imagine being able to approach any object in the real world and instantly learn how to read
磁気比例式 / 小型高速応答単電源 3.3V Magnetic Proportion System / Compact size and High-speed response. Vcc = +3.3V LA02P Series
 磁気比例式 / 小型高速応答単電源 3.3V Magnetic Proportion System / Compact size and High-speed response. Vcc = +3.3V LA02P Series LA02P 1/5 101 絶対最大定格 ABSOLUTE MAXIMUM RATINGS 電源電圧 Supply voltage 一次側導体温度 Jumper temperature
磁気比例式 / 小型高速応答単電源 3.3V Magnetic Proportion System / Compact size and High-speed response. Vcc = +3.3V LA02P Series LA02P 1/5 101 絶対最大定格 ABSOLUTE MAXIMUM RATINGS 電源電圧 Supply voltage 一次側導体温度 Jumper temperature
Summary of the meeting with Professor Stewart Freeman
 Summary of the meeting with Professor Stewart Freeman 1. Personal profile (1) Name Dr. Stewart P.H.T. Freeman (2) Affiliation Professorial Research Fellow, University of Glasgow & Head of Facility, Accelerator
Summary of the meeting with Professor Stewart Freeman 1. Personal profile (1) Name Dr. Stewart P.H.T. Freeman (2) Affiliation Professorial Research Fellow, University of Glasgow & Head of Facility, Accelerator
The Bright Side of Urban Shrinkage: Steps toward Restructuring Cities
 Jun. 2016 2018 No.12 No.5 Feb. FEATURE STORY The Bright Side of Urban Shrinkage: Steps toward Restructuring Cities One urgent challenge resulting from the rapid population decline in Japan today is the
Jun. 2016 2018 No.12 No.5 Feb. FEATURE STORY The Bright Side of Urban Shrinkage: Steps toward Restructuring Cities One urgent challenge resulting from the rapid population decline in Japan today is the
The Current State of Digital Healthcare
 デジタルヘルスケアの現状 Toru Watsuji* Infrastructures for the evaluation of the state of health of individuals using a standardized communication network consisting of advanced instruments and subsequent data analysis
デジタルヘルスケアの現状 Toru Watsuji* Infrastructures for the evaluation of the state of health of individuals using a standardized communication network consisting of advanced instruments and subsequent data analysis
Present Status of SMEs I
 Yosuke KAWASAKI Assistant Director Information Dissemination and Policy Promotion Division Japan Patent Office December 16th, 2011 Regional Workshop for the Least Developed Countries of Asia and the Pacific
Yosuke KAWASAKI Assistant Director Information Dissemination and Policy Promotion Division Japan Patent Office December 16th, 2011 Regional Workshop for the Least Developed Countries of Asia and the Pacific
TDK-Lambda A C 1/27
 RWS 50B-600B Series A262-53-01C 1/27 INDEX PAGE 1. Evaluation Method 1-1. 測定回路 Circuit used for determination 4 測定回路 1 Circuit 1 used for determination 静特性 Steady state data 通電ドリフト特性 Warm up voltage drift
RWS 50B-600B Series A262-53-01C 1/27 INDEX PAGE 1. Evaluation Method 1-1. 測定回路 Circuit used for determination 4 測定回路 1 Circuit 1 used for determination 静特性 Steady state data 通電ドリフト特性 Warm up voltage drift
Sirichai Tammaruckwattana. A thesis submitted in partial fulfilment for the requirements of. the degree of Ph.D. (by Research) at the
 at the") Experimental Assessment with Wind Turbine Emulator of Variable-Speed Wind Power Generation System using Boost Chopper Circuit of Permanent Magnet Synchronous Generator By Sirichai Tammaruckwattana A thesis
Experimental Assessment with Wind Turbine Emulator of Variable-Speed Wind Power Generation System using Boost Chopper Circuit of Permanent Magnet Synchronous Generator By Sirichai Tammaruckwattana A thesis
Private Equity: where should you invest today? P&I Global Pension Symposium, Tokyo
 Private Equity: where should you invest today? P&I Global Pension Symposium, Tokyo David Seex, Head of Alternatives, APAC November 2018 For Institutionall investors only. Not suitable for retail clients
Private Equity: where should you invest today? P&I Global Pension Symposium, Tokyo David Seex, Head of Alternatives, APAC November 2018 For Institutionall investors only. Not suitable for retail clients
Supporting Communications in Global Networks. Kevin Duh & 歐陽靖民
 Supporting Communications in Global Networks Kevin Duh & 歐陽靖民 Supporting Communications in Global Networks Machine Translation Kevin Duh 6000 Number of Languages in the World 世界中の言語の数 Image courtesy of:
Supporting Communications in Global Networks Kevin Duh & 歐陽靖民 Supporting Communications in Global Networks Machine Translation Kevin Duh 6000 Number of Languages in the World 世界中の言語の数 Image courtesy of: