Towards the development of cognitive robots
|
|
|
- Lauren Paul
- 6 years ago
- Views:
Transcription

")
1 Towards the development of cognitive robots Antonio Bandera Grupo de Ingeniería de Sistemas Integrados Universidad de Málaga, Spain Pablo Bustos RoboLab Universidad de Extremadura, Spain International Workshop on Brain-inspired computing Cretaro (Italy) July 8-11, 2013
2 Motivation and goals The simulation theory of cognition Making robots to imagine for acting On-going experimental scenarios Rehabilitation robotics Vendor robotics Conclusions and future work
3 Motivation and goals The simulation theory of cognition Making robots to imagine for acting On-going experimental scenarios Rehabilitation robotics Vendor robotics Conclusions and future work

 behavior.")
 but with a lot of friends that know a lot about robotics,")
4 Who are we? ISIS/RoboLab groups Our goals: present and future The development of robots that can share the environment with us, exhibiting a correct (social) behavior. People Cáceres Madrid Albacete A small group at Málaga and Cáceres (Spain) but with a lot of friends that know a lot about robotics, computer vision, mathematics Realities Málaga Linares Integra project (200K EUR) Therapist project (200K EUR) Adapta project (300K EUR)
5 Motivation Robots for acting From motor control Control of action A well-functioning motor system is an essential requirement if the robot is to move through the environment safely, reach and grasp objects and learn new skills. Abnormalities in the awareness and control of action - C. Frith, S. Blakemore, D. Wolpert, 2000 MUECAS, LOKI and URSUS RoboLab But the problem is also to determine which actions to perform and in which order, and how to perform these actions.
6 Motivation Robots for acting to robotics agency Robotics agency The experience of agency refers to the experience of being in control both of one s own actions and, through them, of events in the external world. Acting on the outer world Subjective experience How to proceed The experience of agency - Patrick Haggard and Manos Tsakiris, 2009 MUECAS, LOKI and URSUS RoboLab Step-by-step!!

 The current status of the simulation")
7 Motivation The simulation theory Open problem We would like to develop a software structure that endows a robot with this subjective experience. One possibility Intention Mental simulation of action and behaviour Anticipation Sensory Confirmation Mental simulation of perception (imagination) The current status of the simulation theory of cognition, G. Hesslow, Brain Research, 2011


8 Goal Making robots to imagine for acting Putting a virtual robot inside of a virtual world The problem of modeling itself and the outer world At perception level: there is a representational gap 1 between outer items and inner models At situational level: there is a need of models and of mechanisms to drive these models At deliberative level: the course of action should be reactively adapted to the dynamic scenario 2 1 Generic model abstraction from examples, Y. Keselman and S. Dickinson, CVPR, 1: , Towards performing everyday manipulation activities, M. Beetz et al, Robotics and Autonomous Systems, 2010
9 Motivation and goals The simulation theory of cognition Making robots to imagine for acting On-going experimental scenarios Rehabilitation robotics Vendor robotics Conclusions and future work
10 Motivation and goals The simulation theory of cognition Making robots to imagine for acting On-going experimental scenarios Rehabilitation robotics Vendor robotics Conclusions and future work
11 The simulation theory of cognition Foundations simulation of movement precedes and plans for upcoming physical action and activates the same cortical and subcortical structures that are responsible for motor execution - Keith D. Markman, William M.P. Klein, and Julie A. Suhr The common coding hypothesis 1 : Actions are coded in terms of the perceivable effects they will generate Associations between motor patterns and sensory effects can then be used backward to retrieve a movement by anticipating its effects Perception-action codes are also accessible during action observation, and perception activates action representations to the degree that the perceived and the represented actions are similar 1 Prinz, W. (2003). Experimental approaches to action. In J. Roessler & N. Eilan (Eds.), Agency and self-awareness (pp ). Oxford, England: Oxford University Press.
12 The simulation theory of cognition Foundations simulation of movement precedes and plans for upcoming physical action and activates the same cortical and subcortical structures that are responsible for motor execution - Keith D. Markman, William M.P. Klein, and Julie A. Suhr The simulation theory of cognition 1 : Motor structures are activated when behaviours are simulated, as during normal overt action but suppressing its execution Internal activation of sensory cortex simulate perception in a way that resembles its normal activation during perception of external stimuli Overt and simulated actions can elicit perceptual simulation of their most probable consequences (anticipation) 1 G. Hesslow (2011) The current status of the simulation theory of cognition, Brain Research
13 The simulation theory of cognition Engineering Body movement at the brain. The motor cortex: Primary motor cortex (Area 4): A map of the human body muscles Premotor cortex (Area 6): Body postures (optimal position for a movement) Supplementary motor area (Area 6): Movement planning and initiation on the basis of past experience. Anticipation Somatosensory cortex : A map of the human body sensing Posterior Parietal Cortex (Area 5): Coding space / spatial attention to body movements Posterior Parietal Cortex (Area 7): Visual information (from MT or V5) integration The parietal lobes and the prefrontal areas represent the highest level of integration in the motor control hierarchy: they take the decision of what action to accomplish.
14 The simulation theory of cognition Engineering Basal ganglia Domain Knowledge Plan library Prefrontal cortex Transformational planner (movement plan)
15 The simulation theory of cognition Engineering Basal ganglia Domain Knowledge Plan library Prefrontal cortex Transformational planner (movement plan) SMA + Cerebelum Situational planner (whole body pose)
 SMA + Cerebelum Situational planner (whole body pose) PMC + brainstem + spinal cord Physics-based planner (motor")
16 The simulation theory of cognition Engineering Basal ganglia Domain Knowledge Plan library Prefrontal cortex Transformational planner (movement plan) SMA + Cerebelum Situational planner (whole body pose) PMC + brainstem + spinal cord Physics-based planner (motor commands)
17 The simulation theory of cognition Engineering Basal ganglia Domain Knowledge Plan library Prefrontal cortex Transformational planner (movement plan) Deep State Hybrid representation Sensing SMA + Cerebelum Situational planner (whole body pose) PMC + brainstem + spinal cord Physics-based planner (motor commands) The operation of each hierarchical level in the motor control system is extremely dependent on the sensory information that it receives. It can be considered that the motor system must really be considered in sensorimotor terms.
18 The simulation theory of cognition Engineering Basal ganglia Domain Knowledge Plan library Prefrontal cortex Transformational planner (movement plan) Deep State Hybrid representation Sensing SMA + Cerebelum Situational planner (whole body pose) PMC + brainstem + spinal cord Physics-based planner (motor commands) The operation of each hierarchical level in the motor control system is extremely dependent on the sensory information that it receives. It can be considered that the motor system must really be considered in sensorimotor terms.
19 Motivation and goals The simulation theory of cognition Making robots to imagine for acting On-going experimental scenarios Rehabilitation robotics Vendor robotics Conclusions and future work
20 Motivation and goals The simulation theory of cognition Making robots to imagine for acting On-going experimental scenarios Rehabilitation robotics Vendor robotics Conclusions and future work
21 Cognitive architecture Deep State Representation Models 3D graphics engine Deep State Hybrid representation Putting a virtual robot inside of a virtual world The problem of modeling itself and the outer world At perception level: there is a representational gap between outer items and inner models At situational level: there is a need of models and of mechanisms to drive these models At deliberative level: the course of action should be reactively adapted to the dynamic scenario Links to planners
22 Cognitive architecture Deep State Representation Models Deep State Hybrid representation PELEA (University Carlos III Madrid) 3D graphics engine EXECUTIVE Links to planners PERCEPTION (Proprioceptive, vision )
23 Cognitive architecture Deep State Representation Models Deep State Hybrid representation PELEA (University Carlos III Madrid) 3D graphics engine EXECUTIVE Links to planners PERCEPTION (Proprioceptive, vision )
24 Cognitive architecture A global view Deep State Hybrid representation PELEA (University Carlos III Madrid) EXECUTIVE Deep State Hybrid representation Planner + Executive PERCEPTIION BEHAVIOURS

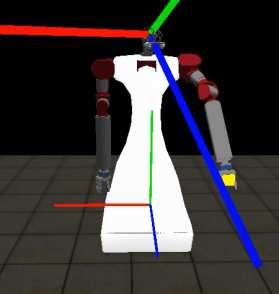
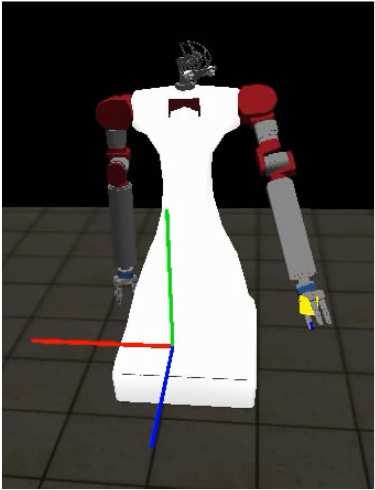
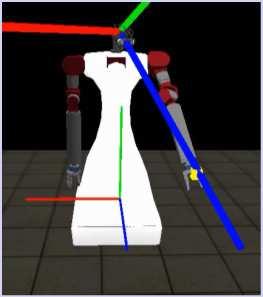
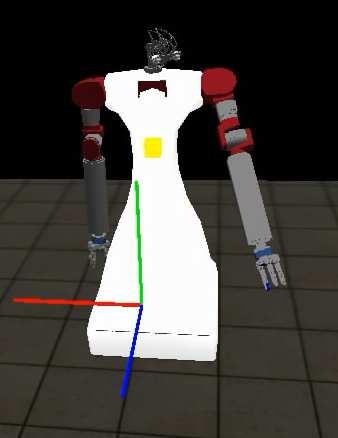
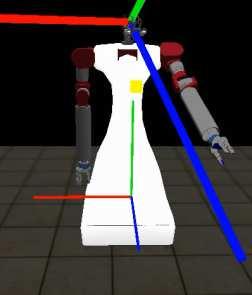
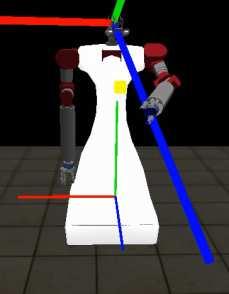
25 Cognitive architecture An illustrative example Acting on the outer world Acting on the inner world
26 Motivation and goals The simulation theory of cognition Making robots to imagine for acting On-going experimental scenarios Rehabilitation robotics Vendor robotics Conclusions and future work
27 Motivation and goals The simulation theory of cognition Making robots to imagine for acting On-going experimental scenarios Rehabilitation robotics Vendor robotics Conclusions and future work
28 Experimental scenarios Rehabilitation robotics URSUS, the antecessor of THERAPIST RoboLab Neuro-rehabilitation therapy pursuits the recovery of damaged neuronal areas and/or muscles from the repetitive practice of certain motor or cognitive activities. The patient's recovery directly depends on the adherence to neuro-rehabilitation therapy. Within this project, we are working on the definition of new neuro-rehabilitation therapies through the development of THERAPIST, a robot that will perform as an innovative trainer in motor deficit therapies.


29 Experimental scenarios Rehabilitation robotics URSUS, the antecessor of THERAPIST RoboLab In order to engage patients in social interactions, our therapist robot should be able to emanate responses at human interaction rates, and exhibit a pro-active behaviour This behaviour implies that the internal architecture of the robot should not only be able to perceive and act. It should also be able to perform off-line reasoning. Perceive the outer world Update the inner DSR Simulate an ACTION Simulate a PERCEPTION ACT Anticipation cancels out the inherent delays of physical systems





30 Experimental scenarios Vendor robotics Working on large environments, the goal of the Adapta project is to use interactive panel to capture the people attention and to show them publicity contents. Our aim is to incorporate to this scenario a Gualzru, a robot that is able to engage with people through expressions, dialogue, gestures and that tries to convince pedestrians to come to an interactive stand panel where publicity contents are shown.
31 Motivation and goals The simulation theory of cognition Making robots to imagine for acting On-going experimental scenarios Rehabilitation robotics Vendor robotics Conclusions and future work
32 Motivation and goals The simulation theory of cognition Making robots to imagine for acting On-going experimental scenarios Rehabilitation robotics Vendor robotics Conclusions and future work

33 Conclusions and future work Deep state representations coupled with a hierarchy of planners could provide the necessary structure to implement internal simulation systems Further complexity can be achieved with a self-similar architecture, where low-level behaviors are themselves organized as a composition of DSR, planners and behaviors. Is there a correspondence in the brain? A big challenge is to handle the complexity of very large distributed computational systems implementing cognitive architectures. Integration of models of attention for action/perception focusing. New design tools working at increasing levels of abstraction are needed, i e. domain specific languages, specialized frameworks Evaluate the extension of the temporal scale of emulation (to the future an past)
34 Towards the development of cognitive robots Antonio Bandera Grupo de Ingeniería de Sistemas Integrados Universidad de Málaga, Spain Pablo Bustos RoboLab Universidad de Extremadura, Spain
A Three-Dimensional Evaluation of Body Representation Change of Human Upper Limb Focused on Sense of Ownership and Sense of Agency
 A Three-Dimensional Evaluation of Body Representation Change of Human Upper Limb Focused on Sense of Ownership and Sense of Agency Shunsuke Hamasaki, Atsushi Yamashita and Hajime Asama Department of Precision
A Three-Dimensional Evaluation of Body Representation Change of Human Upper Limb Focused on Sense of Ownership and Sense of Agency Shunsuke Hamasaki, Atsushi Yamashita and Hajime Asama Department of Precision
ENHANCED HUMAN-AGENT INTERACTION: AUGMENTING INTERACTION MODELS WITH EMBODIED AGENTS BY SERAFIN BENTO. MASTER OF SCIENCE in INFORMATION SYSTEMS
 BY SERAFIN BENTO MASTER OF SCIENCE in INFORMATION SYSTEMS Edmonton, Alberta September, 2015 ABSTRACT The popularity of software agents demands for more comprehensive HAI design processes. The outcome of
BY SERAFIN BENTO MASTER OF SCIENCE in INFORMATION SYSTEMS Edmonton, Alberta September, 2015 ABSTRACT The popularity of software agents demands for more comprehensive HAI design processes. The outcome of
Evaluating Effect of Sense of Ownership and Sense of Agency on Body Representation Change of Human Upper Limb
 Evaluating Effect of Sense of Ownership and Sense of Agency on Body Representation Change of Human Upper Limb Shunsuke Hamasaki, Qi An, Wen Wen, Yusuke Tamura, Hiroshi Yamakawa, Atsushi Yamashita, Hajime
Evaluating Effect of Sense of Ownership and Sense of Agency on Body Representation Change of Human Upper Limb Shunsuke Hamasaki, Qi An, Wen Wen, Yusuke Tamura, Hiroshi Yamakawa, Atsushi Yamashita, Hajime
Hybrid architectures. IAR Lecture 6 Barbara Webb
 Hybrid architectures IAR Lecture 6 Barbara Webb Behaviour Based: Conclusions But arbitrary and difficult to design emergent behaviour for a given task. Architectures do not impose strong constraints Options?
Hybrid architectures IAR Lecture 6 Barbara Webb Behaviour Based: Conclusions But arbitrary and difficult to design emergent behaviour for a given task. Architectures do not impose strong constraints Options?
Supplementary Figure 1
 Supplementary Figure 1 Left aspl Right aspl Detailed description of the fmri activation during allocentric action observation in the aspl. Averaged activation (N=13) during observation of the allocentric
Supplementary Figure 1 Left aspl Right aspl Detailed description of the fmri activation during allocentric action observation in the aspl. Averaged activation (N=13) during observation of the allocentric
Combining interactive multimedia and virtual reality to rehabilitate agency in schizophrenia
 Combining interactive multimedia and virtual reality to rehabilitate agency in schizophrenia E A Lallart, S C Machefaux and R Jouvent Emotion Center CNRS Paris 6 UMR 7593 Hôpital de la Salpêtrière, 47,
Combining interactive multimedia and virtual reality to rehabilitate agency in schizophrenia E A Lallart, S C Machefaux and R Jouvent Emotion Center CNRS Paris 6 UMR 7593 Hôpital de la Salpêtrière, 47,
Modeling cortical maps with Topographica
 Modeling cortical maps with Topographica James A. Bednar a, Yoonsuck Choe b, Judah De Paula a, Risto Miikkulainen a, Jefferson Provost a, and Tal Tversky a a Department of Computer Sciences, The University
Modeling cortical maps with Topographica James A. Bednar a, Yoonsuck Choe b, Judah De Paula a, Risto Miikkulainen a, Jefferson Provost a, and Tal Tversky a a Department of Computer Sciences, The University
Lecture IV. Sensory processing during active versus passive movements
 Lecture IV Sensory processing during active versus passive movements The ability to distinguish sensory inputs that are a consequence of our own actions (reafference) from those that result from changes
Lecture IV Sensory processing during active versus passive movements The ability to distinguish sensory inputs that are a consequence of our own actions (reafference) from those that result from changes
The Special Senses: Vision
 OLLI Lecture 5 The Special Senses: Vision Vision The eyes are the sensory organs for vision. They collect light waves through their photoreceptors (located in the retina) and transmit them as nerve impulses
OLLI Lecture 5 The Special Senses: Vision Vision The eyes are the sensory organs for vision. They collect light waves through their photoreceptors (located in the retina) and transmit them as nerve impulses
Towards a Methodology for Designing Artificial Conscious Robotic Systems
 Towards a Methodology for Designing Artificial Conscious Robotic Systems Antonio Chella 1, Massimo Cossentino 2 and Valeria Seidita 1 1 Dipartimento di Ingegneria Informatica - University of Palermo, Viale
Towards a Methodology for Designing Artificial Conscious Robotic Systems Antonio Chella 1, Massimo Cossentino 2 and Valeria Seidita 1 1 Dipartimento di Ingegneria Informatica - University of Palermo, Viale
Virtual Reality in Neuro- Rehabilitation and Beyond
 Virtual Reality in Neuro- Rehabilitation and Beyond Amanda Carr, OTRL, CBIS Origami Brain Injury Rehabilitation Center Director of Rehabilitation Amanda.Carr@origamirehab.org Objectives Define virtual
Virtual Reality in Neuro- Rehabilitation and Beyond Amanda Carr, OTRL, CBIS Origami Brain Injury Rehabilitation Center Director of Rehabilitation Amanda.Carr@origamirehab.org Objectives Define virtual
Embodiment illusions via multisensory integration
 Embodiment illusions via multisensory integration COGS160: sensory systems and neural coding presenter: Pradeep Shenoy 1 The illusory hand Botvinnik, Science 2004 2 2 This hand is my hand An illusion of
Embodiment illusions via multisensory integration COGS160: sensory systems and neural coding presenter: Pradeep Shenoy 1 The illusory hand Botvinnik, Science 2004 2 2 This hand is my hand An illusion of
An Unreal Based Platform for Developing Intelligent Virtual Agents
 An Unreal Based Platform for Developing Intelligent Virtual Agents N. AVRADINIS, S. VOSINAKIS, T. PANAYIOTOPOULOS, A. BELESIOTIS, I. GIANNAKAS, R. KOUTSIAMANIS, K. TILELIS Knowledge Engineering Lab, Department
An Unreal Based Platform for Developing Intelligent Virtual Agents N. AVRADINIS, S. VOSINAKIS, T. PANAYIOTOPOULOS, A. BELESIOTIS, I. GIANNAKAS, R. KOUTSIAMANIS, K. TILELIS Knowledge Engineering Lab, Department
Cognitive Systems and Robotics: opportunities in FP7
 Cognitive Systems and Robotics: opportunities in FP7 Austrian Robotics Summit July 3, 2009 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media European
Cognitive Systems and Robotics: opportunities in FP7 Austrian Robotics Summit July 3, 2009 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media European
FP7 ICT Call 6: Cognitive Systems and Robotics
 FP7 ICT Call 6: Cognitive Systems and Robotics Information day Luxembourg, January 14, 2010 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media
FP7 ICT Call 6: Cognitive Systems and Robotics Information day Luxembourg, January 14, 2010 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media
GPU Computing for Cognitive Robotics
 GPU Computing for Cognitive Robotics Martin Peniak, Davide Marocco, Angelo Cangelosi GPU Technology Conference, San Jose, California, 25 March, 2014 Acknowledgements This study was financed by: EU Integrating
GPU Computing for Cognitive Robotics Martin Peniak, Davide Marocco, Angelo Cangelosi GPU Technology Conference, San Jose, California, 25 March, 2014 Acknowledgements This study was financed by: EU Integrating
Key-Words: - Fuzzy Behaviour Controls, Multiple Target Tracking, Obstacle Avoidance, Ultrasonic Range Finders
 Fuzzy Behaviour Based Navigation of a Mobile Robot for Tracking Multiple Targets in an Unstructured Environment NASIR RAHMAN, ALI RAZA JAFRI, M. USMAN KEERIO School of Mechatronics Engineering Beijing
Fuzzy Behaviour Based Navigation of a Mobile Robot for Tracking Multiple Targets in an Unstructured Environment NASIR RAHMAN, ALI RAZA JAFRI, M. USMAN KEERIO School of Mechatronics Engineering Beijing
I+ I. Eric Eisenstadt, Ph.D. DARPA Defense Sciences Office. Direct Brain-Machine Interface. Science and Technology Symposium April 2004
 ------~~--------------~---------------- Direct Brain-Machine Interface Eric Eisenstadt, Ph.D. DARPA Defense Sciences Office Science and Technology Symposium 21-22 April 2004 I+ I Defence Research and Recherche
------~~--------------~---------------- Direct Brain-Machine Interface Eric Eisenstadt, Ph.D. DARPA Defense Sciences Office Science and Technology Symposium 21-22 April 2004 I+ I Defence Research and Recherche
Below is provided a chapter summary of the dissertation that lays out the topics under discussion.
 Introduction This dissertation articulates an opportunity presented to architecture by computation, specifically its digital simulation of space known as Virtual Reality (VR) and its networked, social
Introduction This dissertation articulates an opportunity presented to architecture by computation, specifically its digital simulation of space known as Virtual Reality (VR) and its networked, social
Non-Invasive Brain-Actuated Control of a Mobile Robot
 Non-Invasive Brain-Actuated Control of a Mobile Robot Jose del R. Millan, Frederic Renkens, Josep Mourino, Wulfram Gerstner 5/3/06 Josh Storz CSE 599E BCI Introduction (paper perspective) BCIs BCI = Brain
Non-Invasive Brain-Actuated Control of a Mobile Robot Jose del R. Millan, Frederic Renkens, Josep Mourino, Wulfram Gerstner 5/3/06 Josh Storz CSE 599E BCI Introduction (paper perspective) BCIs BCI = Brain
Human Robot Interaction (HRI)
") Brief Introduction to HRI Batu Akan batu.akan@mdh.se Mälardalen Högskola September 29, 2008 Overview 1 Introduction What are robots What is HRI Application areas of HRI 2 3 Motivations Proposed Solution
Brief Introduction to HRI Batu Akan batu.akan@mdh.se Mälardalen Högskola September 29, 2008 Overview 1 Introduction What are robots What is HRI Application areas of HRI 2 3 Motivations Proposed Solution
Modeling, Architectures and Signal Processing for Brain Computer Interfaces
 Modeling, Architectures and Signal Processing for Brain Computer Interfaces Jose C. Principe, Ph.D. Distinguished Professor of ECE/BME University of Florida principe@cnel.ufl.edu www.cnel.ufl.edu US versus
Modeling, Architectures and Signal Processing for Brain Computer Interfaces Jose C. Principe, Ph.D. Distinguished Professor of ECE/BME University of Florida principe@cnel.ufl.edu www.cnel.ufl.edu US versus
Artificial Intelligence
 Artificial Intelligence (Sistemas Inteligentes) Pedro Cabalar Depto. Computación Universidade da Coruña, SPAIN Chapter 1. Introduction Pedro Cabalar (UDC) ( Depto. AIComputación Universidade da Chapter
Artificial Intelligence (Sistemas Inteligentes) Pedro Cabalar Depto. Computación Universidade da Coruña, SPAIN Chapter 1. Introduction Pedro Cabalar (UDC) ( Depto. AIComputación Universidade da Chapter
Reinventing movies How do we tell stories in VR? Diego Gutierrez Graphics & Imaging Lab Universidad de Zaragoza
 Reinventing movies How do we tell stories in VR? Diego Gutierrez Graphics & Imaging Lab Universidad de Zaragoza Computer Graphics Computational Imaging Virtual Reality Joint work with: A. Serrano, J. Ruiz-Borau
Reinventing movies How do we tell stories in VR? Diego Gutierrez Graphics & Imaging Lab Universidad de Zaragoza Computer Graphics Computational Imaging Virtual Reality Joint work with: A. Serrano, J. Ruiz-Borau
Cognitive robots and emotional intelligence Cloud robotics Ethical, legal and social issues of robotic Construction robots Human activities in many
 Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Glossary of terms. Short explanation
 Glossary Concept Module. Video Short explanation Abstraction 2.4 Capturing the essence of the behavior of interest (getting a model or representation) Action in the control Derivative 4.2 The control signal
Glossary Concept Module. Video Short explanation Abstraction 2.4 Capturing the essence of the behavior of interest (getting a model or representation) Action in the control Derivative 4.2 The control signal
Lecture 4 Foundations and Cognitive Processes in Visual Perception From the Retina to the Visual Cortex
 Lecture 4 Foundations and Cognitive Processes in Visual Perception From the Retina to the Visual Cortex 1.Vision Science 2.Visual Performance 3.The Human Visual System 4.The Retina 5.The Visual Field and
Lecture 4 Foundations and Cognitive Processes in Visual Perception From the Retina to the Visual Cortex 1.Vision Science 2.Visual Performance 3.The Human Visual System 4.The Retina 5.The Visual Field and
Brain Computer Interfaces Lecture 2: Current State of the Art in BCIs
 Brain Computer Interfaces Lecture 2: Current State of the Art in BCIs Lars Schwabe Adaptive and Regenerative Software Systems http://ars.informatik.uni-rostock.de 2011 UNIVERSITÄT ROSTOCK FACULTY OF COMPUTER
Brain Computer Interfaces Lecture 2: Current State of the Art in BCIs Lars Schwabe Adaptive and Regenerative Software Systems http://ars.informatik.uni-rostock.de 2011 UNIVERSITÄT ROSTOCK FACULTY OF COMPUTER
Intro to Intelligent Robotics EXAM Spring 2008, Page 1 of 9
 Intro to Intelligent Robotics EXAM Spring 2008, Page 1 of 9 Student Name: Student ID # UOSA Statement of Academic Integrity On my honor I affirm that I have neither given nor received inappropriate aid
Intro to Intelligent Robotics EXAM Spring 2008, Page 1 of 9 Student Name: Student ID # UOSA Statement of Academic Integrity On my honor I affirm that I have neither given nor received inappropriate aid
Booklet of teaching units
 International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
Multisensory brain mechanisms. model of bodily self-consciousness.
 Multisensory brain mechanisms of bodily self-consciousness Olaf Blanke 1,2,3 Abstract Recent research has linked bodily self-consciousness to the processing and integration of multisensory bodily signals
Multisensory brain mechanisms of bodily self-consciousness Olaf Blanke 1,2,3 Abstract Recent research has linked bodily self-consciousness to the processing and integration of multisensory bodily signals
Non Invasive Brain Computer Interface for Movement Control
 Non Invasive Brain Computer Interface for Movement Control V.Venkatasubramanian 1, R. Karthik Balaji 2 Abstract: - There are alternate methods that ease the movement of wheelchairs such as voice control,
Non Invasive Brain Computer Interface for Movement Control V.Venkatasubramanian 1, R. Karthik Balaji 2 Abstract: - There are alternate methods that ease the movement of wheelchairs such as voice control,
What do I need to know about multisensory interactions?
 What do I need to know about multisensory interactions? Adolfo M. Bronstein Neuro-otology Unit Centre for Neuroscience Imperial College London Cortex: Conscious Perception Vertigo Brainstem: III/IV/VI
What do I need to know about multisensory interactions? Adolfo M. Bronstein Neuro-otology Unit Centre for Neuroscience Imperial College London Cortex: Conscious Perception Vertigo Brainstem: III/IV/VI
Sensations and Perceptions in Cicerobot a Museum Guide Robot
 Sensations and Perceptions in Cicerobot a Museum Guide Robot Antonio Chella, Irene Macaluso Dipartimento di Ingegneria Informatica, Università di Palermo Viale delle Scienze, building 6 90128 Palermo,
Sensations and Perceptions in Cicerobot a Museum Guide Robot Antonio Chella, Irene Macaluso Dipartimento di Ingegneria Informatica, Università di Palermo Viale delle Scienze, building 6 90128 Palermo,
YDDON. Humans, Robots, & Intelligent Objects New communication approaches
 YDDON Humans, Robots, & Intelligent Objects New communication approaches Building Robot intelligence Interdisciplinarity Turning things into robots www.ydrobotics.co m Edifício A Moagem Cidade do Engenho
YDDON Humans, Robots, & Intelligent Objects New communication approaches Building Robot intelligence Interdisciplinarity Turning things into robots www.ydrobotics.co m Edifício A Moagem Cidade do Engenho
FP7 STREP. The. Consortium. Marine Robots and Dexterous Manipulation for Enabling Autonomous Underwater Multipurpose Intervention Missions
 FP7 STREP Marine Robots and Dexterous Manipulation for Enabling Autonomous Underwater Multipurpose Intervention Missions ID 248497 Strategic Objective: ICT 2009 4.2.1 Cognitive Systems, Interaction, Robotics
FP7 STREP Marine Robots and Dexterous Manipulation for Enabling Autonomous Underwater Multipurpose Intervention Missions ID 248497 Strategic Objective: ICT 2009 4.2.1 Cognitive Systems, Interaction, Robotics
A neuronal structure for learning by imitation. ENSEA, 6, avenue du Ponceau, F-95014, Cergy-Pontoise cedex, France. fmoga,
 A neuronal structure for learning by imitation Sorin Moga and Philippe Gaussier ETIS / CNRS 2235, Groupe Neurocybernetique, ENSEA, 6, avenue du Ponceau, F-9514, Cergy-Pontoise cedex, France fmoga, gaussierg@ensea.fr
A neuronal structure for learning by imitation Sorin Moga and Philippe Gaussier ETIS / CNRS 2235, Groupe Neurocybernetique, ENSEA, 6, avenue du Ponceau, F-9514, Cergy-Pontoise cedex, France fmoga, gaussierg@ensea.fr
ROBOT CONTROL VIA DIALOGUE. Arkady Yuschenko
 158 No:13 Intelligent Information and Engineering Systems ROBOT CONTROL VIA DIALOGUE Arkady Yuschenko Abstract: The most rational mode of communication between intelligent robot and human-operator is bilateral
158 No:13 Intelligent Information and Engineering Systems ROBOT CONTROL VIA DIALOGUE Arkady Yuschenko Abstract: The most rational mode of communication between intelligent robot and human-operator is bilateral
State of the Science Symposium
 State of the Science Symposium Virtual Reality and Physical Rehabilitation: A New Toy or a New Research and Rehabilitation Tool? Emily A. Keshner Department of Physical Therapy College of Health Professions
State of the Science Symposium Virtual Reality and Physical Rehabilitation: A New Toy or a New Research and Rehabilitation Tool? Emily A. Keshner Department of Physical Therapy College of Health Professions
Making Representations: From Sensation to Perception
 Making Representations: From Sensation to Perception Mary-Anne Williams Innovation and Enterprise Research Lab University of Technology, Sydney Australia Overview Understanding Cognition Understanding
Making Representations: From Sensation to Perception Mary-Anne Williams Innovation and Enterprise Research Lab University of Technology, Sydney Australia Overview Understanding Cognition Understanding
Steering a Driving Simulator Using the Queueing Network-Model Human Processor (QN-MHP)
") University of Iowa Iowa Research Online Driving Assessment Conference 2003 Driving Assessment Conference Jul 22nd, 12:00 AM Steering a Driving Simulator Using the Queueing Network-Model Human Processor
University of Iowa Iowa Research Online Driving Assessment Conference 2003 Driving Assessment Conference Jul 22nd, 12:00 AM Steering a Driving Simulator Using the Queueing Network-Model Human Processor
The organization of the human nervous system. OVERHEAD Organization of the Human Nervous System CHAPTER 11 BLM
 CHAPTER 11 BLM 11.1.1 OVERHEAD Organization of the Human Nervous System The organization of the human nervous system. CHAPTER 11 BLM 11.1.3 HANDOUT From Sensor to Muscle Action Label 1 through 17 on the
CHAPTER 11 BLM 11.1.1 OVERHEAD Organization of the Human Nervous System The organization of the human nervous system. CHAPTER 11 BLM 11.1.3 HANDOUT From Sensor to Muscle Action Label 1 through 17 on the
Dipartimento di Elettronica Informazione e Bioingegneria Robotics
 Dipartimento di Elettronica Informazione e Bioingegneria Robotics Behavioral robotics @ 2014 Behaviorism behave is what organisms do Behaviorism is built on this assumption, and its goal is to promote
Dipartimento di Elettronica Informazione e Bioingegneria Robotics Behavioral robotics @ 2014 Behaviorism behave is what organisms do Behaviorism is built on this assumption, and its goal is to promote
MECHANICAL DESIGN LEARNING ENVIRONMENTS BASED ON VIRTUAL REALITY TECHNOLOGIES
 INTERNATIONAL CONFERENCE ON ENGINEERING AND PRODUCT DESIGN EDUCATION 4 & 5 SEPTEMBER 2008, UNIVERSITAT POLITECNICA DE CATALUNYA, BARCELONA, SPAIN MECHANICAL DESIGN LEARNING ENVIRONMENTS BASED ON VIRTUAL
INTERNATIONAL CONFERENCE ON ENGINEERING AND PRODUCT DESIGN EDUCATION 4 & 5 SEPTEMBER 2008, UNIVERSITAT POLITECNICA DE CATALUNYA, BARCELONA, SPAIN MECHANICAL DESIGN LEARNING ENVIRONMENTS BASED ON VIRTUAL
Processing streams PSY 310 Greg Francis. Lecture 10. Neurophysiology
 Processing streams PSY 310 Greg Francis Lecture 10 A continuous surface infolded on itself. Neurophysiology We are working under the following hypothesis What we see is determined by the pattern of neural
Processing streams PSY 310 Greg Francis Lecture 10 A continuous surface infolded on itself. Neurophysiology We are working under the following hypothesis What we see is determined by the pattern of neural
R (2) Controlling System Application with hands by identifying movements through Camera
 Controlling System Application with hands by identifying movements through Camera") R (2) N (5) Oral (3) Total (10) Dated Sign Assignment Group: C Problem Definition: Controlling System Application with hands by identifying movements through Camera Prerequisite: 1. Web Cam Connectivity
R (2) N (5) Oral (3) Total (10) Dated Sign Assignment Group: C Problem Definition: Controlling System Application with hands by identifying movements through Camera Prerequisite: 1. Web Cam Connectivity
INTELLIGENT WHEELCHAIRS
 INTELLIGENT WHEELCHAIRS Patrick Carrington INTELLWHEELS: MODULAR DEVELOPMENT PLATFORM FOR INTELLIGENT WHEELCHAIRS Rodrigo Braga, Marcelo Petry, Luis Reis, António Moreira INTRODUCTION IntellWheels is a
INTELLIGENT WHEELCHAIRS Patrick Carrington INTELLWHEELS: MODULAR DEVELOPMENT PLATFORM FOR INTELLIGENT WHEELCHAIRS Rodrigo Braga, Marcelo Petry, Luis Reis, António Moreira INTRODUCTION IntellWheels is a
Presented by: V.Lakshana Regd. No.: Information Technology CET, Bhubaneswar
 BRAIN COMPUTER INTERFACE Presented by: V.Lakshana Regd. No.: 0601106040 Information Technology CET, Bhubaneswar Brain Computer Interface from fiction to reality... In the futuristic vision of the Wachowski
BRAIN COMPUTER INTERFACE Presented by: V.Lakshana Regd. No.: 0601106040 Information Technology CET, Bhubaneswar Brain Computer Interface from fiction to reality... In the futuristic vision of the Wachowski
EEG frequency tagging to study active and passive rhythmic movements
 EEG frequency tagging to study active and passive rhythmic movements Dissertation presented by Aurore NIEUWENHUYS for obtaining the Master s degree in Biomedical Engineering Supervisor(s) André MOURAUX,
EEG frequency tagging to study active and passive rhythmic movements Dissertation presented by Aurore NIEUWENHUYS for obtaining the Master s degree in Biomedical Engineering Supervisor(s) André MOURAUX,
TOWARDS A NEW GENERATION OF CONSCIOUS AUTONOMOUS ROBOTS
 TOWARDS A NEW GENERATION OF CONSCIOUS AUTONOMOUS ROBOTS Antonio Chella Dipartimento di Ingegneria Informatica, Università di Palermo Artificial Consciousness Perception Imagination Attention Planning Emotion
TOWARDS A NEW GENERATION OF CONSCIOUS AUTONOMOUS ROBOTS Antonio Chella Dipartimento di Ingegneria Informatica, Università di Palermo Artificial Consciousness Perception Imagination Attention Planning Emotion
10th International Workshop on DATA ANALYSIS METHODS FOR SOFTWARE SYSTEMS
 10th International Workshop on DATA ANALYSIS METHODS FOR SOFTWARE SYSTEMS Plenary Session Business and Science Together Friday, November 30 14 00 16 00 Jonas Kubilius Deep Learning for Understanding Human
10th International Workshop on DATA ANALYSIS METHODS FOR SOFTWARE SYSTEMS Plenary Session Business and Science Together Friday, November 30 14 00 16 00 Jonas Kubilius Deep Learning for Understanding Human
Multi-Agent Planning
 25 PRICAI 2000 Workshop on Teams with Adjustable Autonomy PRICAI 2000 Workshop on Teams with Adjustable Autonomy Position Paper Designing an architecture for adjustably autonomous robot teams David Kortenkamp
25 PRICAI 2000 Workshop on Teams with Adjustable Autonomy PRICAI 2000 Workshop on Teams with Adjustable Autonomy Position Paper Designing an architecture for adjustably autonomous robot teams David Kortenkamp
Multi-Agent Systems in Distributed Communication Environments
 Multi-Agent Systems in Distributed Communication Environments CAMELIA CHIRA, D. DUMITRESCU Department of Computer Science Babes-Bolyai University 1B M. Kogalniceanu Street, Cluj-Napoca, 400084 ROMANIA
Multi-Agent Systems in Distributed Communication Environments CAMELIA CHIRA, D. DUMITRESCU Department of Computer Science Babes-Bolyai University 1B M. Kogalniceanu Street, Cluj-Napoca, 400084 ROMANIA
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Capturing and Adapting Traces for Character Control in Computer Role Playing Games
 Capturing and Adapting Traces for Character Control in Computer Role Playing Games Jonathan Rubin and Ashwin Ram Palo Alto Research Center 3333 Coyote Hill Road, Palo Alto, CA 94304 USA Jonathan.Rubin@parc.com,
Capturing and Adapting Traces for Character Control in Computer Role Playing Games Jonathan Rubin and Ashwin Ram Palo Alto Research Center 3333 Coyote Hill Road, Palo Alto, CA 94304 USA Jonathan.Rubin@parc.com,
Towards affordance based human-system interaction based on cyber-physical systems
 Towards affordance based human-system interaction based on cyber-physical systems Zoltán Rusák 1, Imre Horváth 1, Yuemin Hou 2, Ji Lihong 2 1 Faculty of Industrial Design Engineering, Delft University
Towards affordance based human-system interaction based on cyber-physical systems Zoltán Rusák 1, Imre Horváth 1, Yuemin Hou 2, Ji Lihong 2 1 Faculty of Industrial Design Engineering, Delft University
Natural Interaction with Social Robots
 Workshop: Natural Interaction with Social Robots Part of the Topig Group with the same name. http://homepages.stca.herts.ac.uk/~comqkd/tg-naturalinteractionwithsocialrobots.html organized by Kerstin Dautenhahn,
Workshop: Natural Interaction with Social Robots Part of the Topig Group with the same name. http://homepages.stca.herts.ac.uk/~comqkd/tg-naturalinteractionwithsocialrobots.html organized by Kerstin Dautenhahn,
Behaviour-Based Control. IAR Lecture 5 Barbara Webb
 Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Why interest in visual perception?
 Raffaella Folgieri Digital Information & Communication Departiment Constancy factors in visual perception 26/11/2010, Gjovik, Norway Why interest in visual perception? to investigate main factors in VR
Raffaella Folgieri Digital Information & Communication Departiment Constancy factors in visual perception 26/11/2010, Gjovik, Norway Why interest in visual perception? to investigate main factors in VR
Intelligent Systems: Perspectives and Research Challenges. Rajendra Akerkar
 Intelligent Systems: Perspectives and Research Challenges Rajendra Akerkar Technomathematics Research Foundation TMRF Report 10 2012 Intelligent Systems Perspectives and Research Challenges TMRF-report-10-2012
Intelligent Systems: Perspectives and Research Challenges Rajendra Akerkar Technomathematics Research Foundation TMRF Report 10 2012 Intelligent Systems Perspectives and Research Challenges TMRF-report-10-2012
Analysis of brain waves according to their frequency
 Analysis of brain waves according to their frequency Z. Koudelková, M. Strmiska, R. Jašek Abstract The primary purpose of this article is to show and analyse the brain waves, which are activated during
Analysis of brain waves according to their frequency Z. Koudelková, M. Strmiska, R. Jašek Abstract The primary purpose of this article is to show and analyse the brain waves, which are activated during
CSE 165: 3D User Interaction. Lecture #14: 3D UI Design
 CSE 165: 3D User Interaction Lecture #14: 3D UI Design 2 Announcements Homework 3 due tomorrow 2pm Monday: midterm discussion Next Thursday: midterm exam 3D UI Design Strategies 3 4 Thus far 3DUI hardware
CSE 165: 3D User Interaction Lecture #14: 3D UI Design 2 Announcements Homework 3 due tomorrow 2pm Monday: midterm discussion Next Thursday: midterm exam 3D UI Design Strategies 3 4 Thus far 3DUI hardware
A developmental approach to grasping
 A developmental approach to grasping Lorenzo Natale, Giorgio Metta and Giulio Sandini LIRA-Lab, DIST, University of Genoa Viale Causa 13, 16145, Genova Italy email: {nat, pasa, sandini}@liralab.it Abstract
A developmental approach to grasping Lorenzo Natale, Giorgio Metta and Giulio Sandini LIRA-Lab, DIST, University of Genoa Viale Causa 13, 16145, Genova Italy email: {nat, pasa, sandini}@liralab.it Abstract
Birth of An Intelligent Humanoid Robot in Singapore
 Birth of An Intelligent Humanoid Robot in Singapore Ming Xie Nanyang Technological University Singapore 639798 Email: mmxie@ntu.edu.sg Abstract. Since 1996, we have embarked into the journey of developing
Birth of An Intelligent Humanoid Robot in Singapore Ming Xie Nanyang Technological University Singapore 639798 Email: mmxie@ntu.edu.sg Abstract. Since 1996, we have embarked into the journey of developing
A Robust Neural Robot Navigation Using a Combination of Deliberative and Reactive Control Architectures
 A Robust Neural Robot Navigation Using a Combination of Deliberative and Reactive Control Architectures D.M. Rojas Castro, A. Revel and M. Ménard * Laboratory of Informatics, Image and Interaction (L3I)
A Robust Neural Robot Navigation Using a Combination of Deliberative and Reactive Control Architectures D.M. Rojas Castro, A. Revel and M. Ménard * Laboratory of Informatics, Image and Interaction (L3I)
Android (Child android)
") Social and ethical issue Why have I developed the android? Hiroshi ISHIGURO Department of Adaptive Machine Systems, Osaka University ATR Intelligent Robotics and Communications Laboratories JST ERATO Asada
Social and ethical issue Why have I developed the android? Hiroshi ISHIGURO Department of Adaptive Machine Systems, Osaka University ATR Intelligent Robotics and Communications Laboratories JST ERATO Asada
Touch Perception and Emotional Appraisal for a Virtual Agent
 Touch Perception and Emotional Appraisal for a Virtual Agent Nhung Nguyen, Ipke Wachsmuth, Stefan Kopp Faculty of Technology University of Bielefeld 33594 Bielefeld Germany {nnguyen, ipke, skopp}@techfak.uni-bielefeld.de
Touch Perception and Emotional Appraisal for a Virtual Agent Nhung Nguyen, Ipke Wachsmuth, Stefan Kopp Faculty of Technology University of Bielefeld 33594 Bielefeld Germany {nnguyen, ipke, skopp}@techfak.uni-bielefeld.de
CONSIDERATION OF HUMAN COMPUTER INTERACTION IN ROBOTIC FIELD
 ABSTRACT CONSIDERATION OF HUMAN COMPUTER INTERACTION IN ROBOTIC FIELD Tarek Toumi and Abdelmadjid Zidani Computer Science Department, University of Batna, 05000, Algeria Technological progress leads the
ABSTRACT CONSIDERATION OF HUMAN COMPUTER INTERACTION IN ROBOTIC FIELD Tarek Toumi and Abdelmadjid Zidani Computer Science Department, University of Batna, 05000, Algeria Technological progress leads the
Chapter 8: Perceiving Motion
 Chapter 8: Perceiving Motion Motion perception occurs (a) when a stationary observer perceives moving stimuli, such as this couple crossing the street; and (b) when a moving observer, like this basketball
Chapter 8: Perceiving Motion Motion perception occurs (a) when a stationary observer perceives moving stimuli, such as this couple crossing the street; and (b) when a moving observer, like this basketball
Virtual Reality to Support Modelling. Martin Pett Modelling and Visualisation Business Unit Transport Systems Catapult
 Virtual Reality to Support Modelling Martin Pett Modelling and Visualisation Business Unit Transport Systems Catapult VIRTUAL REALITY TO SUPPORT MODELLING: WHY & WHAT IS IT GOOD FOR? Why is the TSC /M&V
Virtual Reality to Support Modelling Martin Pett Modelling and Visualisation Business Unit Transport Systems Catapult VIRTUAL REALITY TO SUPPORT MODELLING: WHY & WHAT IS IT GOOD FOR? Why is the TSC /M&V
Interface Design V: Beyond the Desktop
 Interface Design V: Beyond the Desktop Rob Procter Further Reading Dix et al., chapter 4, p. 153-161 and chapter 15. Norman, The Invisible Computer, MIT Press, 1998, chapters 4 and 15. 11/25/01 CS4: HCI
Interface Design V: Beyond the Desktop Rob Procter Further Reading Dix et al., chapter 4, p. 153-161 and chapter 15. Norman, The Invisible Computer, MIT Press, 1998, chapters 4 and 15. 11/25/01 CS4: HCI
AN AUTONOMOUS SIMULATION BASED SYSTEM FOR ROBOTIC SERVICES IN PARTIALLY KNOWN ENVIRONMENTS
 AN AUTONOMOUS SIMULATION BASED SYSTEM FOR ROBOTIC SERVICES IN PARTIALLY KNOWN ENVIRONMENTS Eva Cipi, PhD in Computer Engineering University of Vlora, Albania Abstract This paper is focused on presenting
AN AUTONOMOUS SIMULATION BASED SYSTEM FOR ROBOTIC SERVICES IN PARTIALLY KNOWN ENVIRONMENTS Eva Cipi, PhD in Computer Engineering University of Vlora, Albania Abstract This paper is focused on presenting
Outline. Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types
 Environment types Agent types") Intelligent Agents Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types Agents An agent is anything that can be viewed as
Intelligent Agents Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types Agents An agent is anything that can be viewed as
An Integrated HMM-Based Intelligent Robotic Assembly System
 An Integrated HMM-Based Intelligent Robotic Assembly System H.Y.K. Lau, K.L. Mak and M.C.C. Ngan Department of Industrial & Manufacturing Systems Engineering The University of Hong Kong, Pokfulam Road,
An Integrated HMM-Based Intelligent Robotic Assembly System H.Y.K. Lau, K.L. Mak and M.C.C. Ngan Department of Industrial & Manufacturing Systems Engineering The University of Hong Kong, Pokfulam Road,
Motor Imagery based Brain Computer Interface (BCI) using Artificial Neural Network Classifiers
 using Artificial Neural Network Classifiers") Motor Imagery based Brain Computer Interface (BCI) using Artificial Neural Network Classifiers Maitreyee Wairagkar Brain Embodiment Lab, School of Systems Engineering, University of Reading, Reading, U.K.
Motor Imagery based Brain Computer Interface (BCI) using Artificial Neural Network Classifiers Maitreyee Wairagkar Brain Embodiment Lab, School of Systems Engineering, University of Reading, Reading, U.K.
Agents in the Real World Agents and Knowledge Representation and Reasoning
 Agents in the Real World Agents and Knowledge Representation and Reasoning An Introduction Mitsubishi Concordia, Java-based mobile agent system. http://www.merl.com/projects/concordia Copernic Agents for
Agents in the Real World Agents and Knowledge Representation and Reasoning An Introduction Mitsubishi Concordia, Java-based mobile agent system. http://www.merl.com/projects/concordia Copernic Agents for
Digital image processing vs. computer vision Higher-level anchoring
 Digital image processing vs. computer vision Higher-level anchoring Václav Hlaváč Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception
Digital image processing vs. computer vision Higher-level anchoring Václav Hlaváč Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception
Feelable User Interfaces: An Exploration of Non-Visual Tangible User Interfaces
 Feelable User Interfaces: An Exploration of Non-Visual Tangible User Interfaces Katrin Wolf Telekom Innovation Laboratories TU Berlin, Germany katrin.wolf@acm.org Peter Bennett Interaction and Graphics
Feelable User Interfaces: An Exploration of Non-Visual Tangible User Interfaces Katrin Wolf Telekom Innovation Laboratories TU Berlin, Germany katrin.wolf@acm.org Peter Bennett Interaction and Graphics
Keywords Multi-Agent, Distributed, Cooperation, Fuzzy, Multi-Robot, Communication Protocol. Fig. 1. Architecture of the Robots.
 1 José Manuel Molina, Vicente Matellán, Lorenzo Sommaruga Laboratorio de Agentes Inteligentes (LAI) Departamento de Informática Avd. Butarque 15, Leganés-Madrid, SPAIN Phone: +34 1 624 94 31 Fax +34 1
1 José Manuel Molina, Vicente Matellán, Lorenzo Sommaruga Laboratorio de Agentes Inteligentes (LAI) Departamento de Informática Avd. Butarque 15, Leganés-Madrid, SPAIN Phone: +34 1 624 94 31 Fax +34 1
Roles for Sensorimotor Behavior in Cognitive Awareness: An Immersive Sound Kinetic-based Motion Training System. Ioannis Tarnanas, Vicky Tarnana PhD
 Roles for Sensorimotor Behavior in Cognitive Awareness: An Immersive Sound Kinetic-based Motion Training System Ioannis Tarnanas, Vicky Tarnana PhD ABSTRACT A variety of interactive musical tokens are
Roles for Sensorimotor Behavior in Cognitive Awareness: An Immersive Sound Kinetic-based Motion Training System Ioannis Tarnanas, Vicky Tarnana PhD ABSTRACT A variety of interactive musical tokens are
A DIALOGUE-BASED APPROACH TO MULTI-ROBOT TEAM CONTROL
 A DIALOGUE-BASED APPROACH TO MULTI-ROBOT TEAM CONTROL Nathanael Chambers, James Allen, Lucian Galescu and Hyuckchul Jung Institute for Human and Machine Cognition 40 S. Alcaniz Street Pensacola, FL 32502
A DIALOGUE-BASED APPROACH TO MULTI-ROBOT TEAM CONTROL Nathanael Chambers, James Allen, Lucian Galescu and Hyuckchul Jung Institute for Human and Machine Cognition 40 S. Alcaniz Street Pensacola, FL 32502
Cognitive Robotics 2016/2017
 Cognitive Robotics 2016/2017 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Cognitive Robotics 2016/2017 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Governing Lethal Behavior: Embedding Ethics in a Hybrid Reactive Deliberative Architecture
 Governing Lethal Behavior: Embedding Ethics in a Hybrid Reactive Deliberative Architecture Ronald Arkin Gordon Briggs COMP150-BBR November 18, 2010 Overview Military Robots Goal of Ethical Military Robots
Governing Lethal Behavior: Embedding Ethics in a Hybrid Reactive Deliberative Architecture Ronald Arkin Gordon Briggs COMP150-BBR November 18, 2010 Overview Military Robots Goal of Ethical Military Robots
Vision V Perceiving Movement
 Vision V Perceiving Movement Overview of Topics Chapter 8 in Goldstein (chp. 9 in 7th ed.) Movement is tied up with all other aspects of vision (colour, depth, shape perception...) Differentiating self-motion
Vision V Perceiving Movement Overview of Topics Chapter 8 in Goldstein (chp. 9 in 7th ed.) Movement is tied up with all other aspects of vision (colour, depth, shape perception...) Differentiating self-motion
Vision V Perceiving Movement
 Vision V Perceiving Movement Overview of Topics Chapter 8 in Goldstein (chp. 9 in 7th ed.) Movement is tied up with all other aspects of vision (colour, depth, shape perception...) Differentiating self-motion
Vision V Perceiving Movement Overview of Topics Chapter 8 in Goldstein (chp. 9 in 7th ed.) Movement is tied up with all other aspects of vision (colour, depth, shape perception...) Differentiating self-motion
Training in realistic virtual environments:
 Training in realistic virtual environments: Impact on user performance in a motor imagery-based Brain-Computer Interface Leando da Silva-Sauer, Luis Valero- Aguayo, Francisco Velasco-Álvarez, Sergio Varona-Moya,
Training in realistic virtual environments: Impact on user performance in a motor imagery-based Brain-Computer Interface Leando da Silva-Sauer, Luis Valero- Aguayo, Francisco Velasco-Álvarez, Sergio Varona-Moya,
Towards The Adoption of a Perception-Driven Perspective in the Design of Complex Robotic Systems
 Towards The Adoption of a Perception-Driven Perspective in the Design of Complex Robotic Systems Antonio Chella Dip. di Ingegneria Informatica University of Palermo Viale delle Scienze Palermo, Italy chella@dinfo.unipa.it
Towards The Adoption of a Perception-Driven Perspective in the Design of Complex Robotic Systems Antonio Chella Dip. di Ingegneria Informatica University of Palermo Viale delle Scienze Palermo, Italy chella@dinfo.unipa.it
OCCUPATIONAL THERAPY. Essential Question: Do Humans Have a Sixth Sense? Learning Targets: Lesson Overview
 OCCUPATIONAL THERAPY Essential Question: Do Humans Have a Sixth Sense? Learning Targets: Students will: Objectively summarize informational text to describe how information is sensed and perceived by the
OCCUPATIONAL THERAPY Essential Question: Do Humans Have a Sixth Sense? Learning Targets: Students will: Objectively summarize informational text to describe how information is sensed and perceived by the
Embodiment from Engineer s Point of View
 New Trends in CS Embodiment from Engineer s Point of View Andrej Lúčny Department of Applied Informatics FMFI UK Bratislava lucny@fmph.uniba.sk www.microstep-mis.com/~andy 1 Cognitivism Cognitivism is
New Trends in CS Embodiment from Engineer s Point of View Andrej Lúčny Department of Applied Informatics FMFI UK Bratislava lucny@fmph.uniba.sk www.microstep-mis.com/~andy 1 Cognitivism Cognitivism is
INTERACTIVE SKETCHING OF THE URBAN-ARCHITECTURAL SPATIAL DRAFT Peter Kardoš Slovak University of Technology in Bratislava
 INTERACTIVE SKETCHING OF THE URBAN-ARCHITECTURAL SPATIAL DRAFT Peter Kardoš Slovak University of Technology in Bratislava Abstract The recent innovative information technologies and the new possibilities
INTERACTIVE SKETCHING OF THE URBAN-ARCHITECTURAL SPATIAL DRAFT Peter Kardoš Slovak University of Technology in Bratislava Abstract The recent innovative information technologies and the new possibilities
Cognitive Science: What Is It, and How Can I Study It at RPI?
 Cognitive Science: What Is It, and How Can I Study It at RPI? What is Cognitive Science? Cognitive Science: Aspects of Cognition Cognitive science is the science of cognition, which includes such things
Cognitive Science: What Is It, and How Can I Study It at RPI? What is Cognitive Science? Cognitive Science: Aspects of Cognition Cognitive science is the science of cognition, which includes such things
What is Artificial Intelligence? Alternate Definitions (Russell + Norvig) Human intelligence
 Human intelligence") CSE 3401: Intro to Artificial Intelligence & Logic Programming Introduction Required Readings: Russell & Norvig Chapters 1 & 2. Lecture slides adapted from those of Fahiem Bacchus. What is AI? What is
CSE 3401: Intro to Artificial Intelligence & Logic Programming Introduction Required Readings: Russell & Norvig Chapters 1 & 2. Lecture slides adapted from those of Fahiem Bacchus. What is AI? What is
RV - AULA 05 - PSI3502/2018. User Experience, Human Computer Interaction and UI
 RV - AULA 05 - PSI3502/2018 User Experience, Human Computer Interaction and UI Outline Discuss some general principles of UI (user interface) design followed by an overview of typical interaction tasks
RV - AULA 05 - PSI3502/2018 User Experience, Human Computer Interaction and UI Outline Discuss some general principles of UI (user interface) design followed by an overview of typical interaction tasks
Navigating in a dynamic world
 Institutionen för kommunikation och information Examensarbete i datavetenskap 30hp Avancerad nivå Vårterminen 2009 Navigating in a dynamic world Predicting the movements of others Jóhann Sigurður Þórarinsson
Institutionen för kommunikation och information Examensarbete i datavetenskap 30hp Avancerad nivå Vårterminen 2009 Navigating in a dynamic world Predicting the movements of others Jóhann Sigurður Þórarinsson
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT
 MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
CSC384 Intro to Artificial Intelligence* *The following slides are based on Fahiem Bacchus course lecture notes.
 CSC384 Intro to Artificial Intelligence* *The following slides are based on Fahiem Bacchus course lecture notes. Artificial Intelligence A branch of Computer Science. Examines how we can achieve intelligent
CSC384 Intro to Artificial Intelligence* *The following slides are based on Fahiem Bacchus course lecture notes. Artificial Intelligence A branch of Computer Science. Examines how we can achieve intelligent
Introduction to AI. What is Artificial Intelligence?
 Introduction to AI Instructor: Dr. Wei Ding Fall 2009 1 What is Artificial Intelligence? Views of AI fall into four categories: Thinking Humanly Thinking Rationally Acting Humanly Acting Rationally The
Introduction to AI Instructor: Dr. Wei Ding Fall 2009 1 What is Artificial Intelligence? Views of AI fall into four categories: Thinking Humanly Thinking Rationally Acting Humanly Acting Rationally The
Using Multivariate Pattern Analysis to Investigate the Neural Representation of Concepts With Visual and Haptic Features
 University of South Carolina Scholar Commons Theses and Dissertations 1-1-2013 Using Multivariate Pattern Analysis to Investigate the Neural Representation of Concepts With Visual and Haptic Features Laura
University of South Carolina Scholar Commons Theses and Dissertations 1-1-2013 Using Multivariate Pattern Analysis to Investigate the Neural Representation of Concepts With Visual and Haptic Features Laura
CSCI 445 Laurent Itti. Group Robotics. Introduction to Robotics L. Itti & M. J. Mataric 1
 Introduction to Robotics CSCI 445 Laurent Itti Group Robotics Introduction to Robotics L. Itti & M. J. Mataric 1 Today s Lecture Outline Defining group behavior Why group behavior is useful Why group behavior
Introduction to Robotics CSCI 445 Laurent Itti Group Robotics Introduction to Robotics L. Itti & M. J. Mataric 1 Today s Lecture Outline Defining group behavior Why group behavior is useful Why group behavior
An Auditory Localization and Coordinate Transform Chip
 An Auditory Localization and Coordinate Transform Chip Timothy K. Horiuchi timmer@cns.caltech.edu Computation and Neural Systems Program California Institute of Technology Pasadena, CA 91125 Abstract The
An Auditory Localization and Coordinate Transform Chip Timothy K. Horiuchi timmer@cns.caltech.edu Computation and Neural Systems Program California Institute of Technology Pasadena, CA 91125 Abstract The