XX BrainStorming Day
|
|
|
- Bernard Parker
- 6 years ago
- Views:
Transcription


1 UNIVERSITA DEGLI STUDI DI CATANIA Dipartimento di Ingegneria Elettrica Elettronica e dei Sistemi DIEES Catania, Italy XX BrainStorming Day Eng. Cristoforo Camerano cristoforo.camerano@diees.unict.it Ph. D. Student in Electronics, Automation and Complex Systems Engineering XXIII Course Tutors: Luigi Fortuna, Mattia Frasca
2 Outline * Technological Platform for robot s art;


3 Technological Platform for robot s art: Synchronization of the robots
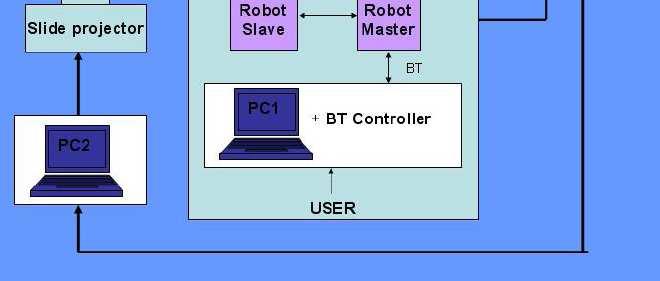
4 Synchronization of chaotic robots The experiments are related to the behaviour of two twin robots that are used to create art. Moreover, the synchronization between the trajectories followed by two robots can be an initial point to coordinate more robots in order to investigate more interesting luminous paths. STEP 1: The two robots can move in all directions within an arena of 190 cm deep and 245 cm wide. The scenario is totally dark. A camera is located in a strategic point of the arena to take pictures of the whole arena every 10, 15 or 20 seconds. The interaction between the user and the robots occurs even in this case is an interface which includes for our experiments a computer station and a joystick BT controller.
5 Synchronization of chaotic robots STEP 2: The two robots start a process of synchronization between themself. The synchronized chaotic systems generate trajectories and thus images following an ideal path from kinetic art to immaterial art. STEP 3: The spectator can see two coordinated robots that generate strange attractors through a computing led pattern and a camera which send to a slide projector the pictures that it takes about the luminous paths.





6 Synchronization of chaotic robots Step1: the arena and the 2 robots Step2: synchronization of the robots Robot MASTER Robot SLAVE Step3: interaction spectator - robots - art Experimental Results and trajectories

7 The used platform
8 Design of the robots - Microcontroller - 3 motors - 2 ultrasonic range sensors - 2 differential drive motors - 2 passive wheels - SMD 16 LED light device


9 Final structure of the robots




10 Real Platform Virtual Platform Synchronization of the logistic maps inside the robots Master Slave PC Station User
11 The control law Let us indicate with VMA and VMB the velocities of the two motors (MA and MB). Equations that describe the differential drive model. c is the distance between the two actuated wheels. We have indicated with x, y and ө the position and the orientation of the robot with respect to a fixed frame of reference. The robot is driven by a chaotic control law which specifies VA and VB at each time instant. In particular a logistic map is used. The equation of the logistic map is: z k +1 = az k (1 - zk ) Given zk we build VA(t) and VB(t) for tk t t k 1. A new value of the map, z k 1 is then computed, which allows to calculate VA(t) and VB(t) in the next time interval tk 1 t t k 2, and so on. According to the value of zk the robot can perform different actions. The interval of admissible value of zk is [0,1] and we fixed a constant value k=100.
12 Experimental Results: trajectories of mechanical Strange Attractors. Art of chaotic robots through kinetic. The following images are referred to the motion of the robots during a time interval of 10 seconds, 15 and 20 seconds respectively.
13
14
15
16
17
18 Conferences and courses L. Fortuna, M. Frasca, C. Camerano., [2008], "Strange attractors, kinematic trajectories and synchronization". International Journal Bifurcations and Chaos,18, ISSN, Robots controlled by Chaotic Laws, 10 th Experimental Chaos Conference (ECC10): Section-Demo, 3-6 June 2008 Catania, Italy. Tecnologie organiche per dispositivi e circuiti July 2008, (Ing. Manuela La Rosa) University of Catania - Engineering Faculty. The Open Wall Project for Art Competition - ITOvation3 NTNU Faculty for Information Technology, Mathematics and Electrical Engineering, Trondheim (Norway), Trondheim Matchmaking, October 2008.
19 Conferences and courses Adaptive System Course a.a University of Catania - Engineering Faculty. Controllo Robusto a.a University of Catania - Engineering Faculty. "Interactive Bubble Robots for Art: Movement Sequences Learning through Mirror Neurons". Authors: Arturo Buscarino, Cristoforo Camerano, Luigi Fortuna, Mattia Frasca. "CHAOS 09 Second IFAC meeting related to analysis and control of chaotic systems (London, UK June 22nd - 24th, 2009). Microchip Regional Trainig course: Microchip dspic Peripheral Configuration May 2009, University of Catania - Engineering Faculty. Salah U.A., Camerano, C., Fortuna, L:, Frasca, M., Jaccheri, L., Information technology and art: Concepts and state of the practice. Chapter in Borko Furht (Ed.): Handbook of Digital Media in Entertainment and Arts, Springer Verlag, Laboratorio sui sistemi complessi, July 2009, University of Catania. (lessons by Prof. Leon Chua-University of California-Berkeley).
20 Conferences and courses ArTe Contest: international contest of digital Art: NTNU Norvegian University of Science and technology, Trondheim- Norway, October Site under construction: Chaotic mimic robots. Buscarino A., Camerano C., Fortuna L., Frasca M., Phil. Trans. R. Soc. A , From kinetic art to immaterial art through chaotic synchronization. Belluomo P., Camerano C., Fortuna L., Frasca M., Dipartimento di Ingegneria Elettrica Elettronica e dei Sistemi, Università degli Studi di Catania, viale A. Doria 6, Catania, Italy, 2009.
21 Thanks for your Attention For further informations please contact the authors Cristoforo Camerano, Luigi Fortuna, Mattia Frasca
INFORMATION TECHNOLOGY AND ART: CONCEPTS AND STATE OF THE PRACTICE
 INFORMATION TECHNOLOGY AND ART: CONCEPTS AND STATE OF THE PRACTICE Salah Uddin Ahmed(1 ), Cristoforo Camerano(2), Luigi Fortuna(2), Mattia Frasca(2), Letizia Jaccheri(1) (1) Norwegian University of Science
INFORMATION TECHNOLOGY AND ART: CONCEPTS AND STATE OF THE PRACTICE Salah Uddin Ahmed(1 ), Cristoforo Camerano(2), Luigi Fortuna(2), Mattia Frasca(2), Letizia Jaccheri(1) (1) Norwegian University of Science
Real-Time Thermo Graphic Analysis of Volcanic Eruptions
 Real-Time Thermo Graphic Analysis of Volcanic Eruptions Bruno Andò 1, Emilio Pecora 2, Nicola Pitrone 1 1 Dipartimento di Ingegneria Elettrica, Elettronica e dei Sistemi, Università di Catania Viale A.
Real-Time Thermo Graphic Analysis of Volcanic Eruptions Bruno Andò 1, Emilio Pecora 2, Nicola Pitrone 1 1 Dipartimento di Ingegneria Elettrica, Elettronica e dei Sistemi, Università di Catania Viale A.
Funzionalità per la navigazione di robot mobili. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Funzionalità per la navigazione di robot mobili Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Variability of the Robotic Domain UNIBG - Corso di Robotica - Prof. Brugali Tourist
Funzionalità per la navigazione di robot mobili Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Variability of the Robotic Domain UNIBG - Corso di Robotica - Prof. Brugali Tourist
Complex Dynamic Phenomena in Power Converters: Bifurcation Analysis and Chaotic Behavior
 Complex Dynamic Phenomena in Power Converters: Bifurcation Analysis and Chaotic Behavior DONATO CAFAGNA, GIUSEPPE GRASSI Dipartimento Ingegneria Innovazione Università di Lecce via Monteroni, 700 Lecce
Complex Dynamic Phenomena in Power Converters: Bifurcation Analysis and Chaotic Behavior DONATO CAFAGNA, GIUSEPPE GRASSI Dipartimento Ingegneria Innovazione Università di Lecce via Monteroni, 700 Lecce
Planning in autonomous mobile robotics
 Sistemi Intelligenti Corso di Laurea in Informatica, A.A. 2017-2018 Università degli Studi di Milano Planning in autonomous mobile robotics Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135
Sistemi Intelligenti Corso di Laurea in Informatica, A.A. 2017-2018 Università degli Studi di Milano Planning in autonomous mobile robotics Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135
Università degli Studi di Roma Tor Vergata Dipartimento di Ingegneria Elettronica. Analogue Electronics. Paolo Colantonio A.A.
 Università degli Studi di Roma Tor Vergata Dipartimento di Ingegneria Elettronica Analogue Electronics Paolo Colantonio A.A. 2056 Operational amplifiers (op amps) Operational amplifiers (op amps) are among
Università degli Studi di Roma Tor Vergata Dipartimento di Ingegneria Elettronica Analogue Electronics Paolo Colantonio A.A. 2056 Operational amplifiers (op amps) Operational amplifiers (op amps) are among
Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free Human Following Navigation in Outdoor Environment
 Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
RESEARCHES IN THE DEVELOPPEMENT OF A SIMULATOR FOR THE TRAINING OF INTERVENTION ROBOT OPERATORS
 RESEARCHES IN THE DEVELOPPEMENT OF A SIMULATOR FOR THE TRAINING OF INTERVENTION ROBOT OPERATORS Eng. Ioan ANDREESCU, CS II, SC ICPSP SA Bucuresti, ROMANIA Eng. Nicolae MORARU, CS I, SC ICPSP SA Bucuresti,
RESEARCHES IN THE DEVELOPPEMENT OF A SIMULATOR FOR THE TRAINING OF INTERVENTION ROBOT OPERATORS Eng. Ioan ANDREESCU, CS II, SC ICPSP SA Bucuresti, ROMANIA Eng. Nicolae MORARU, CS I, SC ICPSP SA Bucuresti,
A NEW MOTOR SPEED MEASUREMENT ALGORITHM BASED ON ACCURATE SLOT HARMONIC SPECTRAL ANALYSIS
 A NEW MOTOR SPEED MEASUREMENT ALGORITHM BASED ON ACCURATE SLOT HARMONIC SPECTRAL ANALYSIS M. Aiello, A. Cataliotti, S. Nuccio Dipartimento di Ingegneria Elettrica -Università degli Studi di Palermo Viale
A NEW MOTOR SPEED MEASUREMENT ALGORITHM BASED ON ACCURATE SLOT HARMONIC SPECTRAL ANALYSIS M. Aiello, A. Cataliotti, S. Nuccio Dipartimento di Ingegneria Elettrica -Università degli Studi di Palermo Viale
Snake Robots. From Biology - Through University - Towards Industry I. Kristin Y. Pettersen
 Snake Robots From Biology - Through University - Towards Industry I Kristin Y. Pettersen Centre for Autonomous Marine Operations and Systems (NTNU AMOS), Department of Engineering Cybernetics, Norwegian
Snake Robots From Biology - Through University - Towards Industry I Kristin Y. Pettersen Centre for Autonomous Marine Operations and Systems (NTNU AMOS), Department of Engineering Cybernetics, Norwegian
sin( x m cos( The position of the mass point D is specified by a set of state variables, (θ roll, θ pitch, r) related to the Cartesian coordinates by:
 related to the Cartesian coordinates by:") Research Article International Journal of Current Engineering and Technology ISSN 77-46 3 INPRESSCO. All Rights Reserved. Available at http://inpressco.com/category/ijcet Modeling improvement of a Humanoid
Research Article International Journal of Current Engineering and Technology ISSN 77-46 3 INPRESSCO. All Rights Reserved. Available at http://inpressco.com/category/ijcet Modeling improvement of a Humanoid
LAB 5: Mobile robots -- Modeling, control and tracking
 LAB 5: Mobile robots -- Modeling, control and tracking Overview In this laboratory experiment, a wheeled mobile robot will be used to illustrate Modeling Independent speed control and steering Longitudinal
LAB 5: Mobile robots -- Modeling, control and tracking Overview In this laboratory experiment, a wheeled mobile robot will be used to illustrate Modeling Independent speed control and steering Longitudinal
Wheeled Mobile Robot Obstacle Avoidance Using Compass and Ultrasonic
 Universal Journal of Control and Automation 6(1): 13-18, 2018 DOI: 10.13189/ujca.2018.060102 http://www.hrpub.org Wheeled Mobile Robot Obstacle Avoidance Using Compass and Ultrasonic Yousef Moh. Abueejela
Universal Journal of Control and Automation 6(1): 13-18, 2018 DOI: 10.13189/ujca.2018.060102 http://www.hrpub.org Wheeled Mobile Robot Obstacle Avoidance Using Compass and Ultrasonic Yousef Moh. Abueejela
UNIVERSITÀ DEGLI STUDI DI GENOVA
 Operational Program European Social Fund - Regione Liguria 2014-2020 ASSE 3 "Education and training" UNIVERSITÀ DEGLI STUDI DI GENOVA EXCERPT OF INFORMATION SHEET SCIENCE AND TECHONOLOGY FOR ELECTRICAL
Operational Program European Social Fund - Regione Liguria 2014-2020 ASSE 3 "Education and training" UNIVERSITÀ DEGLI STUDI DI GENOVA EXCERPT OF INFORMATION SHEET SCIENCE AND TECHONOLOGY FOR ELECTRICAL
Digitalisation as day-to-day-business
 Digitalisation as day-to-day-business What is today feasible for the company in the future Prof. Jivka Ovtcharova INSTITUTE FOR INFORMATION MANAGEMENT IN ENGINEERING Baden-Württemberg Driving force for
Digitalisation as day-to-day-business What is today feasible for the company in the future Prof. Jivka Ovtcharova INSTITUTE FOR INFORMATION MANAGEMENT IN ENGINEERING Baden-Württemberg Driving force for
EXPERIMENTAL STUDY OF IMPULSIVE SYNCHRONIZATION OF CHAOTIC AND HYPERCHAOTIC CIRCUITS
 International Journal of Bifurcation and Chaos, Vol. 9, No. 7 (1999) 1393 1424 c World Scientific Publishing Company EXPERIMENTAL STUDY OF IMPULSIVE SYNCHRONIZATION OF CHAOTIC AND HYPERCHAOTIC CIRCUITS
International Journal of Bifurcation and Chaos, Vol. 9, No. 7 (1999) 1393 1424 c World Scientific Publishing Company EXPERIMENTAL STUDY OF IMPULSIVE SYNCHRONIZATION OF CHAOTIC AND HYPERCHAOTIC CIRCUITS
Introduction to the Course
 Introduction to the Course Multiagent Systems LS Sistemi Multiagente LS Andrea Omicini andrea.omicini@unibo.it Ingegneria Due Alma Mater Studiorum Università di Bologna a Cesena Academic Year 2007/2008
Introduction to the Course Multiagent Systems LS Sistemi Multiagente LS Andrea Omicini andrea.omicini@unibo.it Ingegneria Due Alma Mater Studiorum Università di Bologna a Cesena Academic Year 2007/2008
ICTCM 28th International Conference on Technology in Collegiate Mathematics
 ARDUINO IN THE CLASSROOM: CLASSROOM READY MODULES FOR UNDERGRADUATE MATHEMATICS Michael D. Seminelli 1 Department of Mathematical Sciences United States Military Academy West Point, NY 10996 Michael.Seminelli@usma.edu
ARDUINO IN THE CLASSROOM: CLASSROOM READY MODULES FOR UNDERGRADUATE MATHEMATICS Michael D. Seminelli 1 Department of Mathematical Sciences United States Military Academy West Point, NY 10996 Michael.Seminelli@usma.edu
A MATHEMATICAL MODEL OF A LEGO DIFFERENTIAL DRIVE ROBOT
 314 A MATHEMATICAL MODEL OF A LEGO DIFFERENTIAL DRIVE ROBOT Ph.D. Stud. Eng. Gheorghe GÎLCĂ, Faculty of Automation, Computers and Electronics, University of Craiova, gigi@robotics.ucv.ro Prof. Ph.D. Eng.
314 A MATHEMATICAL MODEL OF A LEGO DIFFERENTIAL DRIVE ROBOT Ph.D. Stud. Eng. Gheorghe GÎLCĂ, Faculty of Automation, Computers and Electronics, University of Craiova, gigi@robotics.ucv.ro Prof. Ph.D. Eng.
Available theses (October 2011) MERLIN Group
 MERLIN Group") Available theses (October 2011) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
Available theses (October 2011) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
Tracking and Formation Control of Leader-Follower Cooperative Mobile Robots Based on Trilateration Data
 EMITTER International Journal of Engineering Technology Vol. 3, No. 2, December 2015 ISSN: 2443-1168 Tracking and Formation Control of Leader-Follower Cooperative Mobile Robots Based on Trilateration Data
EMITTER International Journal of Engineering Technology Vol. 3, No. 2, December 2015 ISSN: 2443-1168 Tracking and Formation Control of Leader-Follower Cooperative Mobile Robots Based on Trilateration Data
SELF-BALANCING MOBILE ROBOT TILTER
 Tomislav Tomašić Andrea Demetlika Prof. dr. sc. Mladen Crneković ISSN xxx-xxxx SELF-BALANCING MOBILE ROBOT TILTER Summary UDC 007.52, 62-523.8 In this project a remote controlled self-balancing mobile
Tomislav Tomašić Andrea Demetlika Prof. dr. sc. Mladen Crneković ISSN xxx-xxxx SELF-BALANCING MOBILE ROBOT TILTER Summary UDC 007.52, 62-523.8 In this project a remote controlled self-balancing mobile
Robot teleoperation is inherently related to sensor data
 Mobile Robotic Teleguide Based on Video Images Comparison Between scopic and scopic Visualization Robot teleoperation is inherently related to sensor data transmission. Sensor data can be interpreted by
Mobile Robotic Teleguide Based on Video Images Comparison Between scopic and scopic Visualization Robot teleoperation is inherently related to sensor data transmission. Sensor data can be interpreted by
An Embedded Approach for Motor Control Boards Design in Mobile Robotics Applications
 An Embedded Approach for Motor Control Boards Design in Mobile Robotics Applications CLAUDIA MASSACCI, ANDREA USAI, PAOLO DI GIAMBERARDINO Department of Computer and System Sciences Antonio Ruberti University
An Embedded Approach for Motor Control Boards Design in Mobile Robotics Applications CLAUDIA MASSACCI, ANDREA USAI, PAOLO DI GIAMBERARDINO Department of Computer and System Sciences Antonio Ruberti University
League <BART LAB AssistBot (THAILAND)>
>") RoboCup@Home League 2013 Jackrit Suthakorn, Ph.D.*, Woratit Onprasert, Sakol Nakdhamabhorn, Rachot Phuengsuk, Yuttana Itsarachaiyot, Choladawan Moonjaita, Syed Saqib Hussain
RoboCup@Home League 2013 Jackrit Suthakorn, Ph.D.*, Woratit Onprasert, Sakol Nakdhamabhorn, Rachot Phuengsuk, Yuttana Itsarachaiyot, Choladawan Moonjaita, Syed Saqib Hussain
Probabilistic Robotics Course. Robots and Sensors Orazio
 Probabilistic Robotics Course Robots and Sensors Orazio Giorgio Grisetti grisetti@dis.uniroma1.it Dept of Computer Control and Management Engineering Sapienza University of Rome Outline Robot Devices Overview
Probabilistic Robotics Course Robots and Sensors Orazio Giorgio Grisetti grisetti@dis.uniroma1.it Dept of Computer Control and Management Engineering Sapienza University of Rome Outline Robot Devices Overview
Università degli Studi di Roma Tor Vergata Dipartimento di Ingegneria Elettronica. Analogue Electronics. Paolo Colantonio A.A.
 Università degli Studi di Roma Tor Vergata Dipartimento di Ingegneria Elettronica Analogue Electronics Paolo Colantonio A.A. 2015-16 Large signal consideration As for the FET, we can use a load line 2
Università degli Studi di Roma Tor Vergata Dipartimento di Ingegneria Elettronica Analogue Electronics Paolo Colantonio A.A. 2015-16 Large signal consideration As for the FET, we can use a load line 2
Chapter 1 - Introduction to Mechatronics. Questions
 Instant download and all chapters Solution Manual Fundamentals of Mechatronics 1st Edition Jouaneh https://testbankdata.com/download/solution-manual-fundamentalsmechatronics-1st-edition-jouaneh/ 1.1 What
Instant download and all chapters Solution Manual Fundamentals of Mechatronics 1st Edition Jouaneh https://testbankdata.com/download/solution-manual-fundamentalsmechatronics-1st-edition-jouaneh/ 1.1 What
The description of team KIKS
 The description of team KIKS Keitaro YAMAUCHI 1, Takamichi YOSHIMOTO 2, Takashi HORII 3, Takeshi CHIKU 4, Masato WATANABE 5,Kazuaki ITOH 6 and Toko SUGIURA 7 Toyota National College of Technology Department
The description of team KIKS Keitaro YAMAUCHI 1, Takamichi YOSHIMOTO 2, Takashi HORII 3, Takeshi CHIKU 4, Masato WATANABE 5,Kazuaki ITOH 6 and Toko SUGIURA 7 Toyota National College of Technology Department
Stabilize humanoid robot teleoperated by a RGB-D sensor
 Stabilize humanoid robot teleoperated by a RGB-D sensor Andrea Bisson, Andrea Busatto, Stefano Michieletto, and Emanuele Menegatti Intelligent Autonomous Systems Lab (IAS-Lab) Department of Information
Stabilize humanoid robot teleoperated by a RGB-D sensor Andrea Bisson, Andrea Busatto, Stefano Michieletto, and Emanuele Menegatti Intelligent Autonomous Systems Lab (IAS-Lab) Department of Information
Available theses (October 2012) MERLIN Group
 MERLIN Group") Available theses (October 2012) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
Available theses (October 2012) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
Estimation of Absolute Positioning of mobile robot using U-SAT
 Estimation of Absolute Positioning of mobile robot using U-SAT Su Yong Kim 1, SooHong Park 2 1 Graduate student, Department of Mechanical Engineering, Pusan National University, KumJung Ku, Pusan 609-735,
Estimation of Absolute Positioning of mobile robot using U-SAT Su Yong Kim 1, SooHong Park 2 1 Graduate student, Department of Mechanical Engineering, Pusan National University, KumJung Ku, Pusan 609-735,
Approaching E_Learning on Three-Phase System Measurements
 Approaching E_Learning on Three-Phase System Measurements S. BAGLIO, P. BAECA, N. PITONE, N. SAVALLI Department of Electrical, Electronic and System Engineering University of Catania Viale A. Doria, 6,
Approaching E_Learning on Three-Phase System Measurements S. BAGLIO, P. BAECA, N. PITONE, N. SAVALLI Department of Electrical, Electronic and System Engineering University of Catania Viale A. Doria, 6,
Multi-robot Formation Control Based on Leader-follower Method
 Journal of Computers Vol. 29 No. 2, 2018, pp. 233-240 doi:10.3966/199115992018042902022 Multi-robot Formation Control Based on Leader-follower Method Xibao Wu 1*, Wenbai Chen 1, Fangfang Ji 1, Jixing Ye
Journal of Computers Vol. 29 No. 2, 2018, pp. 233-240 doi:10.3966/199115992018042902022 Multi-robot Formation Control Based on Leader-follower Method Xibao Wu 1*, Wenbai Chen 1, Fangfang Ji 1, Jixing Ye
An External Command Reading White line Follower Robot
 EE-712 Embedded System Design: Course Project Report An External Command Reading White line Follower Robot 09405009 Mayank Mishra (mayank@cse.iitb.ac.in) 09307903 Badri Narayan Patro (badripatro@ee.iitb.ac.in)
EE-712 Embedded System Design: Course Project Report An External Command Reading White line Follower Robot 09405009 Mayank Mishra (mayank@cse.iitb.ac.in) 09307903 Badri Narayan Patro (badripatro@ee.iitb.ac.in)
MOBILE ROBOT LOCALIZATION with POSITION CONTROL
 T.C. DOKUZ EYLÜL UNIVERSITY ENGINEERING FACULTY ELECTRICAL & ELECTRONICS ENGINEERING DEPARTMENT MOBILE ROBOT LOCALIZATION with POSITION CONTROL Project Report by Ayhan ŞAVKLIYILDIZ - 2011502093 Burcu YELİS
T.C. DOKUZ EYLÜL UNIVERSITY ENGINEERING FACULTY ELECTRICAL & ELECTRONICS ENGINEERING DEPARTMENT MOBILE ROBOT LOCALIZATION with POSITION CONTROL Project Report by Ayhan ŞAVKLIYILDIZ - 2011502093 Burcu YELİS
Jason Agents in CArtAgO Working Environments
 Jason Agents in CArtAgO Working Environments (The slides are partially taken from slides created by Prof. Alessandro Ricci) Laboratory of Multiagent Systems LM Laboratorio di Sistemi Multiagente LM Elena
Jason Agents in CArtAgO Working Environments (The slides are partially taken from slides created by Prof. Alessandro Ricci) Laboratory of Multiagent Systems LM Laboratorio di Sistemi Multiagente LM Elena
An Improved Path Planning Method Based on Artificial Potential Field for a Mobile Robot
 BULGARIAN ACADEMY OF SCIENCES CYBERNETICS AND INFORMATION TECHNOLOGIES Volume 15, No Sofia 015 Print ISSN: 1311-970; Online ISSN: 1314-4081 DOI: 10.1515/cait-015-0037 An Improved Path Planning Method Based
BULGARIAN ACADEMY OF SCIENCES CYBERNETICS AND INFORMATION TECHNOLOGIES Volume 15, No Sofia 015 Print ISSN: 1311-970; Online ISSN: 1314-4081 DOI: 10.1515/cait-015-0037 An Improved Path Planning Method Based
Design Project Introduction DE2-based SecurityBot
 Design Project Introduction DE2-based SecurityBot ECE2031 Fall 2017 1 Design Project Motivation ECE 2031 includes the sophomore-level team design experience You are developing a useful set of tools eventually
Design Project Introduction DE2-based SecurityBot ECE2031 Fall 2017 1 Design Project Motivation ECE 2031 includes the sophomore-level team design experience You are developing a useful set of tools eventually
Formation Control of Unicycle Mobile Robots: a Virtual Structure Approach
 Joint 48th IEEE Conference on Decision and Control and 28th Chinese Control Conference Shanghai, P.R. China, December 6-8, 29 FrC.2 Formation Control of Unicycle Mobile Robots: a Virtual Structure Approach
Joint 48th IEEE Conference on Decision and Control and 28th Chinese Control Conference Shanghai, P.R. China, December 6-8, 29 FrC.2 Formation Control of Unicycle Mobile Robots: a Virtual Structure Approach
Welcome to. NXT Basics. Presenter: Wael Hajj Ali With assistance of: Ammar Shehadeh - Souhaib Alzanki - Samer Abuthaher
 Welcome to NXT Basics Presenter: Wael Hajj Ali With assistance of: Ammar Shehadeh - Souhaib Alzanki - Samer Abuthaher Outline Have you met the Lizard? Introducing the Platform Lego Parts Motors Sensors
Welcome to NXT Basics Presenter: Wael Hajj Ali With assistance of: Ammar Shehadeh - Souhaib Alzanki - Samer Abuthaher Outline Have you met the Lizard? Introducing the Platform Lego Parts Motors Sensors
Booklet of teaching units
 International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
Fernando Ribeiro, Gil Lopes, Davide Oliveira, Fátima Gonçalves, Júlio
 MINHO@home Rodrigues Fernando Ribeiro, Gil Lopes, Davide Oliveira, Fátima Gonçalves, Júlio Grupo de Automação e Robótica, Departamento de Electrónica Industrial, Universidade do Minho, Campus de Azurém,
MINHO@home Rodrigues Fernando Ribeiro, Gil Lopes, Davide Oliveira, Fátima Gonçalves, Júlio Grupo de Automação e Robótica, Departamento de Electrónica Industrial, Universidade do Minho, Campus de Azurém,
Artificial Intelligence: Implications for Autonomous Weapons. Stuart Russell University of California, Berkeley
 Artificial Intelligence: Implications for Autonomous Weapons Stuart Russell University of California, Berkeley Outline AI and autonomy State of the art Likely future developments Conclusions What is AI?
Artificial Intelligence: Implications for Autonomous Weapons Stuart Russell University of California, Berkeley Outline AI and autonomy State of the art Likely future developments Conclusions What is AI?
Whole geometry Finite-Difference modeling of the violin
 Whole geometry Finite-Difference modeling of the violin Institute of Musicology, Neue Rabenstr. 13, 20354 Hamburg, Germany e-mail: R_Bader@t-online.de, A Finite-Difference Modelling of the complete violin
Whole geometry Finite-Difference modeling of the violin Institute of Musicology, Neue Rabenstr. 13, 20354 Hamburg, Germany e-mail: R_Bader@t-online.de, A Finite-Difference Modelling of the complete violin
Simple Path Planning Algorithm for Two-Wheeled Differentially Driven (2WDD) Soccer Robots
 Soccer Robots") Simple Path Planning Algorithm for Two-Wheeled Differentially Driven (2WDD) Soccer Robots Gregor Novak 1 and Martin Seyr 2 1 Vienna University of Technology, Vienna, Austria novak@bluetechnix.at 2 Institute
Simple Path Planning Algorithm for Two-Wheeled Differentially Driven (2WDD) Soccer Robots Gregor Novak 1 and Martin Seyr 2 1 Vienna University of Technology, Vienna, Austria novak@bluetechnix.at 2 Institute
A BIOMIMETIC SENSING SKIN: CHARACTERIZATION OF PIEZORESISTIVE FABRIC-BASED ELASTOMERIC SENSORS
 A BIOMIMETIC SENSING SKIN: CHARACTERIZATION OF PIEZORESISTIVE FABRIC-BASED ELASTOMERIC SENSORS G. PIOGGIA, M. FERRO, F. CARPI, E. LABBOZZETTA, F. DI FRANCESCO F. LORUSSI, D. DE ROSSI Interdepartmental
A BIOMIMETIC SENSING SKIN: CHARACTERIZATION OF PIEZORESISTIVE FABRIC-BASED ELASTOMERIC SENSORS G. PIOGGIA, M. FERRO, F. CARPI, E. LABBOZZETTA, F. DI FRANCESCO F. LORUSSI, D. DE ROSSI Interdepartmental
International Journal of Innovations in Engineering and Technology (IJIET) Nadu, India
 Nadu, India") Evaluation Of Kinematic Walker For Domestic Duties Hansika Surenthar 1, Akshayaa Rajeswari 2, Mr.J.Gurumurthy 3 1,2,3 Department of electronics and communication engineering, Easwari engineering college,
Evaluation Of Kinematic Walker For Domestic Duties Hansika Surenthar 1, Akshayaa Rajeswari 2, Mr.J.Gurumurthy 3 1,2,3 Department of electronics and communication engineering, Easwari engineering college,
MEM380 Applied Autonomous Robots I Winter Feedback Control USARSim
 MEM380 Applied Autonomous Robots I Winter 2011 Feedback Control USARSim Transforming Accelerations into Position Estimates In a perfect world It s not a perfect world. We have noise and bias in our acceleration
MEM380 Applied Autonomous Robots I Winter 2011 Feedback Control USARSim Transforming Accelerations into Position Estimates In a perfect world It s not a perfect world. We have noise and bias in our acceleration
ECE 511: MICROPROCESSORS
 ECE 511: MICROPROCESSORS A project report on SNIFFING DOG Under the guidance of Prof. Jens Peter Kaps By, Preethi Santhanam (G00767634) Ranjit Mandavalli (G00819673) Shaswath Raghavan (G00776950) Swathi
ECE 511: MICROPROCESSORS A project report on SNIFFING DOG Under the guidance of Prof. Jens Peter Kaps By, Preethi Santhanam (G00767634) Ranjit Mandavalli (G00819673) Shaswath Raghavan (G00776950) Swathi
Outline. Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types
 Environment types Agent types") Intelligent Agents Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types Agents An agent is anything that can be viewed as
Intelligent Agents Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types Agents An agent is anything that can be viewed as
Autonomation of the self propelled mower Profihopper based on intelligent landmarks
 Autonomation of the self propelled mower Profihopper based on intelligent landmarks MSc. W. Niehaus, MSc. M. Urra Saco, MSc. K.-U. Wegner, Dipl.-Ing. (FH) A. Linz, MSc. M.Thiel, Prof.Dr. A. Ruckelshausen,
Autonomation of the self propelled mower Profihopper based on intelligent landmarks MSc. W. Niehaus, MSc. M. Urra Saco, MSc. K.-U. Wegner, Dipl.-Ing. (FH) A. Linz, MSc. M.Thiel, Prof.Dr. A. Ruckelshausen,
Australian Journal of Basic and Applied Sciences
 AENSI Journals Australian Journal of Basic and Applied Sciences ISSN:1991-8178 Journal home page: www.ajbasweb.com An Improved Low Cost Automated Mobile Robot 1 J. Hossen, 2 S. Sayeed, 3 M. Saleh, 4 P.
AENSI Journals Australian Journal of Basic and Applied Sciences ISSN:1991-8178 Journal home page: www.ajbasweb.com An Improved Low Cost Automated Mobile Robot 1 J. Hossen, 2 S. Sayeed, 3 M. Saleh, 4 P.
Behaviour Patterns Evolution on Individual and Group Level. Stanislav Slušný, Roman Neruda, Petra Vidnerová. CIMMACS 07, December 14, Tenerife
 Behaviour Patterns Evolution on Individual and Group Level Stanislav Slušný, Roman Neruda, Petra Vidnerová Department of Theoretical Computer Science Institute of Computer Science Academy of Science of
Behaviour Patterns Evolution on Individual and Group Level Stanislav Slušný, Roman Neruda, Petra Vidnerová Department of Theoretical Computer Science Institute of Computer Science Academy of Science of
Motion Control of Mobile Autonomous Robots Using Non-linear Dynamical Systems Approach
 Motion Control of Mobile Autonomous Robots Using Non-linear Dynamical Systems Approach Fernando Ribeiro *, Gil Lopes, Tiago Maia, Hélder Ribeiro, Pedro Silva, Ricardo Roriz, Nuno Ferreira Laboratório de
Motion Control of Mobile Autonomous Robots Using Non-linear Dynamical Systems Approach Fernando Ribeiro *, Gil Lopes, Tiago Maia, Hélder Ribeiro, Pedro Silva, Ricardo Roriz, Nuno Ferreira Laboratório de
Modularity of PRM type cartesian robots and their application in the production of construction materials
 Automation and Robotics in Construction X1 D.A. Chamberlain (Editor) 1994 Elsevier Science B.V. All rights reserved. 587 Modularity of PRM type cartesian robots and their application in the production
Automation and Robotics in Construction X1 D.A. Chamberlain (Editor) 1994 Elsevier Science B.V. All rights reserved. 587 Modularity of PRM type cartesian robots and their application in the production
RescueRobot: Simulating Complex Robots Behaviors in Emergency Situations
 RescueRobot: Simulating Complex Robots Behaviors in Emergency Situations Giuseppe Palestra, Andrea Pazienza, Stefano Ferilli, Berardina De Carolis, and Floriana Esposito Dipartimento di Informatica Università
RescueRobot: Simulating Complex Robots Behaviors in Emergency Situations Giuseppe Palestra, Andrea Pazienza, Stefano Ferilli, Berardina De Carolis, and Floriana Esposito Dipartimento di Informatica Università
Control of motion stability of the line tracer robot using fuzzy logic and kalman filter
 Journal of Physics: Conference Series PAPER OPEN ACCESS Control of motion stability of the line tracer robot using fuzzy logic and kalman filter To cite this article: M S Novelan et al 2018 J. Phys.: Conf.
Journal of Physics: Conference Series PAPER OPEN ACCESS Control of motion stability of the line tracer robot using fuzzy logic and kalman filter To cite this article: M S Novelan et al 2018 J. Phys.: Conf.
Robotic System Simulation and Modeling Stefan Jörg Robotic and Mechatronic Center
 Robotic System Simulation and ing Stefan Jörg Robotic and Mechatronic Center Outline Introduction The SAFROS Robotic System Simulator Robotic System ing Conclusions Folie 2 DLR s Mirosurge: A versatile
Robotic System Simulation and ing Stefan Jörg Robotic and Mechatronic Center Outline Introduction The SAFROS Robotic System Simulator Robotic System ing Conclusions Folie 2 DLR s Mirosurge: A versatile
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo. Introduction: Applications, Problems, Architectures
 Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
Chaotic-Based Processor for Communication and Multimedia Applications Fei Li
 Chaotic-Based Processor for Communication and Multimedia Applications Fei Li 09212020027@fudan.edu.cn Chaos is a phenomenon that attracted much attention in the past ten years. In this paper, we analyze
Chaotic-Based Processor for Communication and Multimedia Applications Fei Li 09212020027@fudan.edu.cn Chaos is a phenomenon that attracted much attention in the past ten years. In this paper, we analyze
Implementation of Conventional and Neural Controllers Using Position and Velocity Feedback
 Implementation of Conventional and Neural Controllers Using Position and Velocity Feedback Expo Paper Department of Electrical and Computer Engineering By: Christopher Spevacek and Manfred Meissner Advisor:
Implementation of Conventional and Neural Controllers Using Position and Velocity Feedback Expo Paper Department of Electrical and Computer Engineering By: Christopher Spevacek and Manfred Meissner Advisor:
Fire Extinguisher Robot Using Ultrasonic Camera and Wi-Fi Network Controlled with Android Smartphone
 IOP Conference Series: Materials Science and Engineering PAPER OPEN ACCESS Fire Extinguisher Robot Using Ultrasonic Camera and Wi-Fi Network Controlled with Android Smartphone To cite this article: B Siregar
IOP Conference Series: Materials Science and Engineering PAPER OPEN ACCESS Fire Extinguisher Robot Using Ultrasonic Camera and Wi-Fi Network Controlled with Android Smartphone To cite this article: B Siregar
Optimum PID Control of Multi-wing Attractors in A Family of Lorenz-like Chaotic Systems
 Optimum PID Control of Multi-wing Attractors in A Family of Lorenz-like Chaotic Systems Anish Acharya 1, Saptarshi Das 2 1. Department of Instrumentation and Electronics Engineering, Jadavpur University,
Optimum PID Control of Multi-wing Attractors in A Family of Lorenz-like Chaotic Systems Anish Acharya 1, Saptarshi Das 2 1. Department of Instrumentation and Electronics Engineering, Jadavpur University,
EMERGENCE OF COMMUNICATION IN TEAMS OF EMBODIED AND SITUATED AGENTS
 EMERGENCE OF COMMUNICATION IN TEAMS OF EMBODIED AND SITUATED AGENTS DAVIDE MAROCCO STEFANO NOLFI Institute of Cognitive Science and Technologies, CNR, Via San Martino della Battaglia 44, Rome, 00185, Italy
EMERGENCE OF COMMUNICATION IN TEAMS OF EMBODIED AND SITUATED AGENTS DAVIDE MAROCCO STEFANO NOLFI Institute of Cognitive Science and Technologies, CNR, Via San Martino della Battaglia 44, Rome, 00185, Italy
ESB LOGISTICS LEARNING FACTORY. Prof. Dr. Ing. Dipl.-Ing. (FH) Vera Hummel, Dipl.-Ing (FH) Beate Brenner
 Vera Hummel, Dipl.-Ing (FH) Beate Brenner") International Academy for Production Engineering 7t th Conference on Learning Factories, Darmstadt, Germany, April 4 th to 5 th 2017 ESB LOGISTICS LEARNING FACTORY Digital twin as enabler for a SMART FACTORY
International Academy for Production Engineering 7t th Conference on Learning Factories, Darmstadt, Germany, April 4 th to 5 th 2017 ESB LOGISTICS LEARNING FACTORY Digital twin as enabler for a SMART FACTORY
The Dipartimento di Elettronica, Informazione e Bioingegneria An international hub of research and innovation in ICT
 The Dipartimento di Elettronica, Informazione e Bioingegneria An international hub of research and innovation in ICT LETIZIA TANCA Chair of the Computer Science and Engineering Area Department Chair: Prof.
The Dipartimento di Elettronica, Informazione e Bioingegneria An international hub of research and innovation in ICT LETIZIA TANCA Chair of the Computer Science and Engineering Area Department Chair: Prof.
Architecture Design and Validation Methods
 Architecture Design and Validation Methods Springer-Verlag Berlin Heidelberg GmbH Egon Börger (Ed.) Architecture Design and Validation Methods With 175 Figures, Springer Editor Prof. Dr. Egon Börger Universita
Architecture Design and Validation Methods Springer-Verlag Berlin Heidelberg GmbH Egon Börger (Ed.) Architecture Design and Validation Methods With 175 Figures, Springer Editor Prof. Dr. Egon Börger Universita
Experimental evaluation of ultrasonic oscillating temperature sensors (UOTS) under cyclically changing temperatures
 under cyclically changing temperatures") Experimental evaluation of ultrasonic oscillating temperature sensors (UOTS) under cyclically changing temperatures HASHMI, Anas, LIGHT, Roger and KALASHNIKOV, Alexander Available from Sheffield Hallam
Experimental evaluation of ultrasonic oscillating temperature sensors (UOTS) under cyclically changing temperatures HASHMI, Anas, LIGHT, Roger and KALASHNIKOV, Alexander Available from Sheffield Hallam
CASE STUDY BRIDGE DYNAMIC MONITORING
 Introduction BRIDGE DYNAMIC MONITORING Monitoring of structure movements and vibrations (bridges, buildings, monuments, towers etc.) is an increasingly important task for today s construction engineers.
Introduction BRIDGE DYNAMIC MONITORING Monitoring of structure movements and vibrations (bridges, buildings, monuments, towers etc.) is an increasingly important task for today s construction engineers.
Abstract Entry TI2827 Crawler for Design Stellaris 2010 competition
 Abstract of Entry TI2827 Crawler for Design Stellaris 2010 competition Subject of this project is an autonomous robot, equipped with various sensors, which moves around the environment, exploring it and
Abstract of Entry TI2827 Crawler for Design Stellaris 2010 competition Subject of this project is an autonomous robot, equipped with various sensors, which moves around the environment, exploring it and
Autonomous Stair Climbing Algorithm for a Small Four-Tracked Robot
 Autonomous Stair Climbing Algorithm for a Small Four-Tracked Robot Quy-Hung Vu, Byeong-Sang Kim, Jae-Bok Song Korea University 1 Anam-dong, Seongbuk-gu, Seoul, Korea vuquyhungbk@yahoo.com, lovidia@korea.ac.kr,
Autonomous Stair Climbing Algorithm for a Small Four-Tracked Robot Quy-Hung Vu, Byeong-Sang Kim, Jae-Bok Song Korea University 1 Anam-dong, Seongbuk-gu, Seoul, Korea vuquyhungbk@yahoo.com, lovidia@korea.ac.kr,
DOWNLOAD OR READ : LOG HORIZON VOL 1 LIGHT NOVEL PDF EBOOK EPUB MOBI
 DOWNLOAD OR READ : LOG HORIZON VOL 1 LIGHT NOVEL PDF EBOOK EPUB MOBI Page 1 Page 2 log horizon vol 1 light novel log horizon vol 1 pdf log horizon vol 1 light novel Log Horizon (Japanese: ムã ・ムãƒ
DOWNLOAD OR READ : LOG HORIZON VOL 1 LIGHT NOVEL PDF EBOOK EPUB MOBI Page 1 Page 2 log horizon vol 1 light novel log horizon vol 1 pdf log horizon vol 1 light novel Log Horizon (Japanese: ムã ・ムãƒ
Sample Pages. Classroom Activities for the Busy Teacher: NXT. 2 nd Edition. Classroom Activities for the Busy Teacher: NXT -
 Classroom Activities for the Busy Teacher: NXT 2 nd Edition Table of Contents Chapter 1: Introduction... 1 Chapter 2: What is a robot?... 5 Chapter 3: Flowcharting... 11 Chapter 4: DomaBot Basics... 15
Classroom Activities for the Busy Teacher: NXT 2 nd Edition Table of Contents Chapter 1: Introduction... 1 Chapter 2: What is a robot?... 5 Chapter 3: Flowcharting... 11 Chapter 4: DomaBot Basics... 15
A NOVEL CONTROL SYSTEM FOR ROBOTIC DEVICES
 A NOVEL CONTROL SYSTEM FOR ROBOTIC DEVICES THAIR A. SALIH, OMAR IBRAHIM YEHEA COMPUTER DEPT. TECHNICAL COLLEGE/ MOSUL EMAIL: ENG_OMAR87@YAHOO.COM, THAIRALI59@YAHOO.COM ABSTRACT It is difficult to find
A NOVEL CONTROL SYSTEM FOR ROBOTIC DEVICES THAIR A. SALIH, OMAR IBRAHIM YEHEA COMPUTER DEPT. TECHNICAL COLLEGE/ MOSUL EMAIL: ENG_OMAR87@YAHOO.COM, THAIRALI59@YAHOO.COM ABSTRACT It is difficult to find
Design of double loop-locked system for brush-less DC motor based on DSP
 International Conference on Advanced Electronic Science and Technology (AEST 2016) Design of double loop-locked system for brush-less DC motor based on DSP Yunhong Zheng 1, a 2, Ziqiang Hua and Li Ma 3
International Conference on Advanced Electronic Science and Technology (AEST 2016) Design of double loop-locked system for brush-less DC motor based on DSP Yunhong Zheng 1, a 2, Ziqiang Hua and Li Ma 3
Development and Evaluation of a Centaur Robot
 Development and Evaluation of a Centaur Robot 1 Satoshi Tsuda, 1 Kuniya Shinozaki, and 2 Ryohei Nakatsu 1 Kwansei Gakuin University, School of Science and Technology 2-1 Gakuen, Sanda, 669-1337 Japan {amy65823,
Development and Evaluation of a Centaur Robot 1 Satoshi Tsuda, 1 Kuniya Shinozaki, and 2 Ryohei Nakatsu 1 Kwansei Gakuin University, School of Science and Technology 2-1 Gakuen, Sanda, 669-1337 Japan {amy65823,
Industrial and service robotics: state of the art and trends Paolo Rocco
 Industrial and service robotics: state of the art and trends Paolo Rocco Politecnico di Milano - Dipartimento di Elettronica, Informazione e Bioingegneria Workshop Future trends in machine tools and manufacturing
Industrial and service robotics: state of the art and trends Paolo Rocco Politecnico di Milano - Dipartimento di Elettronica, Informazione e Bioingegneria Workshop Future trends in machine tools and manufacturing
A Feasibility Study of Time-Domain Passivity Approach for Bilateral Teleoperation of Mobile Manipulator
 International Conference on Control, Automation and Systems 2008 Oct. 14-17, 2008 in COEX, Seoul, Korea A Feasibility Study of Time-Domain Passivity Approach for Bilateral Teleoperation of Mobile Manipulator
International Conference on Control, Automation and Systems 2008 Oct. 14-17, 2008 in COEX, Seoul, Korea A Feasibility Study of Time-Domain Passivity Approach for Bilateral Teleoperation of Mobile Manipulator
Un Approccio Sistemistico allo Studio delle Neuroscienze
 Un Approccio Sistemistico allo Studio delle Neuroscienze Domenico Prattichizzo Dipartimento di Ingegneria dell Informazione Universita di Siena CIRA Settembre 2005 Tropea 0 Workshop su Robotica e Neuroscienze
Un Approccio Sistemistico allo Studio delle Neuroscienze Domenico Prattichizzo Dipartimento di Ingegneria dell Informazione Universita di Siena CIRA Settembre 2005 Tropea 0 Workshop su Robotica e Neuroscienze
A simple embedded stereoscopic vision system for an autonomous rover
 In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 A simple embedded stereoscopic vision
In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 A simple embedded stereoscopic vision
RoboTurk 2014 Team Description
 RoboTurk 2014 Team Description Semih İşeri 1, Meriç Sarıışık 1, Kadir Çetinkaya 2, Rüştü Irklı 1, JeanPierre Demir 1, Cem Recai Çırak 1 1 Department of Electrical and Electronics Engineering 2 Department
RoboTurk 2014 Team Description Semih İşeri 1, Meriç Sarıışık 1, Kadir Çetinkaya 2, Rüştü Irklı 1, JeanPierre Demir 1, Cem Recai Çırak 1 1 Department of Electrical and Electronics Engineering 2 Department
S.P.Q.R. Legged Team Report from RoboCup 2003
 S.P.Q.R. Legged Team Report from RoboCup 2003 L. Iocchi and D. Nardi Dipartimento di Informatica e Sistemistica Universitá di Roma La Sapienza Via Salaria 113-00198 Roma, Italy {iocchi,nardi}@dis.uniroma1.it,
S.P.Q.R. Legged Team Report from RoboCup 2003 L. Iocchi and D. Nardi Dipartimento di Informatica e Sistemistica Universitá di Roma La Sapienza Via Salaria 113-00198 Roma, Italy {iocchi,nardi}@dis.uniroma1.it,
2. Introduction to Computer Haptics
 2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
Small Occupancy Robotic Mechanisms for Endoscopic Surgery
 Small Occupancy Robotic Mechanisms for Endoscopic Surgery Yuki Kobayashi, Shingo Chiyoda, Kouichi Watabe, Masafumi Okada, and Yoshihiko Nakamura Department of Mechano-Informatics, The University of Tokyo,
Small Occupancy Robotic Mechanisms for Endoscopic Surgery Yuki Kobayashi, Shingo Chiyoda, Kouichi Watabe, Masafumi Okada, and Yoshihiko Nakamura Department of Mechano-Informatics, The University of Tokyo,
CS123. Programming Your Personal Robot. Part 3: Reasoning Under Uncertainty
 CS123 Programming Your Personal Robot Part 3: Reasoning Under Uncertainty Topics For Part 3 3.1 The Robot Programming Problem What is robot programming Challenges Real World vs. Virtual World Mapping and
CS123 Programming Your Personal Robot Part 3: Reasoning Under Uncertainty Topics For Part 3 3.1 The Robot Programming Problem What is robot programming Challenges Real World vs. Virtual World Mapping and
Design and Control for Differential Drive Mobile Robot
 Design and Control for Differential Drive Mobile Robot Boru Diriba Hirpo #1 Prof. Wang Zhongmin #2 School of Mechanical Engineering, Tianjin University of Technology and Education, Tianjin 300222, China
Design and Control for Differential Drive Mobile Robot Boru Diriba Hirpo #1 Prof. Wang Zhongmin #2 School of Mechanical Engineering, Tianjin University of Technology and Education, Tianjin 300222, China
Design Concept of State-Chart Method Application through Robot Motion Equipped With Webcam Features as E-Learning Media for Children
 Design Concept of State-Chart Method Application through Robot Motion Equipped With Webcam Features as E-Learning Media for Children Rossi Passarella, Astri Agustina, Sutarno, Kemahyanto Exaudi, and Junkani
Design Concept of State-Chart Method Application through Robot Motion Equipped With Webcam Features as E-Learning Media for Children Rossi Passarella, Astri Agustina, Sutarno, Kemahyanto Exaudi, and Junkani
Mobile Robots (Wheeled) (Take class notes)
 (Take class notes)") Mobile Robots (Wheeled) (Take class notes) Wheeled mobile robots Wheeled mobile platform controlled by a computer is called mobile robot in a broader sense Wheeled robots have a large scope of types and
Mobile Robots (Wheeled) (Take class notes) Wheeled mobile robots Wheeled mobile platform controlled by a computer is called mobile robot in a broader sense Wheeled robots have a large scope of types and
Cognition & Robotics. EUCog - European Network for the Advancement of Artificial Cognitive Systems, Interaction and Robotics
 Cognition & Robotics Recent debates in Cognitive Robotics bring about ways to seek a definitional connection between cognition and robotics, ponder upon the questions: EUCog - European Network for the
Cognition & Robotics Recent debates in Cognitive Robotics bring about ways to seek a definitional connection between cognition and robotics, ponder upon the questions: EUCog - European Network for the
Swarm Intelligence W7: Application of Machine- Learning Techniques to Automatic Control Design and Optimization
 Swarm Intelligence W7: Application of Machine- Learning Techniques to Automatic Control Design and Optimization Learning to avoid obstacles Outline Problem encoding using GA and ANN Floreano and Mondada
Swarm Intelligence W7: Application of Machine- Learning Techniques to Automatic Control Design and Optimization Learning to avoid obstacles Outline Problem encoding using GA and ANN Floreano and Mondada
Differential Mobile Robot Controller Study: A Low Cost Experiment Based on a Small Arduino Based Prototype
 017 5th Mediterranean Conference on Control and Automation (MED) July 3-6, 017. Valletta, Malta Differential Mobile Robot Controller Study: A Low Cost Experiment Based on a Small Arduino Based Prototype
017 5th Mediterranean Conference on Control and Automation (MED) July 3-6, 017. Valletta, Malta Differential Mobile Robot Controller Study: A Low Cost Experiment Based on a Small Arduino Based Prototype
Eur Ing Dr. Lei Zhang Faculty of Engineering and Applied Science University of Regina Canada
 Eur Ing Dr. Lei Zhang Faculty of Engineering and Applied Science University of Regina Canada The Second International Conference on Neuroscience and Cognitive Brain Information BRAININFO 2017, July 22,
Eur Ing Dr. Lei Zhang Faculty of Engineering and Applied Science University of Regina Canada The Second International Conference on Neuroscience and Cognitive Brain Information BRAININFO 2017, July 22,
FUmanoid Team Description Paper 2010
 FUmanoid Team Description Paper 2010 Bennet Fischer, Steffen Heinrich, Gretta Hohl, Felix Lange, Tobias Langner, Sebastian Mielke, Hamid Reza Moballegh, Stefan Otte, Raúl Rojas, Naja von Schmude, Daniel
FUmanoid Team Description Paper 2010 Bennet Fischer, Steffen Heinrich, Gretta Hohl, Felix Lange, Tobias Langner, Sebastian Mielke, Hamid Reza Moballegh, Stefan Otte, Raúl Rojas, Naja von Schmude, Daniel
A Simple Design of Clean Robot
 Journal of Computing and Electronic Information Management ISSN: 2413-1660 A Simple Design of Clean Robot Huichao Wu 1, a, Daofang Chen 2, Yunpeng Yin 3 1 College of Optoelectronic Engineering, Chongqing
Journal of Computing and Electronic Information Management ISSN: 2413-1660 A Simple Design of Clean Robot Huichao Wu 1, a, Daofang Chen 2, Yunpeng Yin 3 1 College of Optoelectronic Engineering, Chongqing
This is a repository copy of Complex robot training tasks through bootstrapping system identification.
 This is a repository copy of Complex robot training tasks through bootstrapping system identification. White Rose Research Online URL for this paper: http://eprints.whiterose.ac.uk/74638/ Monograph: Akanyeti,
This is a repository copy of Complex robot training tasks through bootstrapping system identification. White Rose Research Online URL for this paper: http://eprints.whiterose.ac.uk/74638/ Monograph: Akanyeti,
Service Robots Assisting Human: Designing, Prototyping and Experimental Validation
 Service Robots Assisting Human: Designing, Prototyping and Experimental Validation Y. Maddahi, S. M. Hosseini Monsef, A. Maddahi and R. Kalvandi Abstract This paper addresses the design, prototyping and
Service Robots Assisting Human: Designing, Prototyping and Experimental Validation Y. Maddahi, S. M. Hosseini Monsef, A. Maddahi and R. Kalvandi Abstract This paper addresses the design, prototyping and
Ontology-Based Robots Self-Organization in Cyber-Physical Systems
 AMICT 2015, Petrozavodsk, Russia 13.05.2015 Ontology-Based Robots Self-Organization in Cyber-Physical Systems Alexey Kashevnik, e-mail: alexey@iias.spb.su PhD, Senior Researcher Laboratory of Computer
AMICT 2015, Petrozavodsk, Russia 13.05.2015 Ontology-Based Robots Self-Organization in Cyber-Physical Systems Alexey Kashevnik, e-mail: alexey@iias.spb.su PhD, Senior Researcher Laboratory of Computer
Università degli Studi di Roma Tor Vergata Dipartimento di Ingegneria Elettronica. Analogue Electronics. Paolo Colantonio A.A.
 Università degli Studi di Roma Tor Vergata Dipartimento di Ingegneria Elettronica Analogue Electronics Paolo olantonio A.A. 2015-16 ias issues The D bias point is affected by thermal issue due to the active
Università degli Studi di Roma Tor Vergata Dipartimento di Ingegneria Elettronica Analogue Electronics Paolo olantonio A.A. 2015-16 ias issues The D bias point is affected by thermal issue due to the active
Smart-M3-Based Robot Interaction in Cyber-Physical Systems
 FRUCT 16, Oulu, Finland October 30, 2014 Smart-M3-Based Robot Interaction in Cyber-Physical Systems Nikolay Teslya *, Sergey Savosin * * St. Petersburg Institute for Informatics and Automation of the Russian
FRUCT 16, Oulu, Finland October 30, 2014 Smart-M3-Based Robot Interaction in Cyber-Physical Systems Nikolay Teslya *, Sergey Savosin * * St. Petersburg Institute for Informatics and Automation of the Russian