from the coworker scenario to the cognitive factory scenario
|
|
|
- Primrose Walsh
- 6 years ago
- Views:
Transcription







1 New developments on Industrial Robotics from the coworker scenario to the cognitive factory scenario Download: J. Norberto Pires Departamento de Engenharia Mecânica Faculdade d de Ciências i e Tecnologia Universidade de Coimbra jnp@robotics.dem.uc.pt web: htp://robotics.dem.uc.pt/norberto /
2 topics Productive Robotics Programming g Input output Devices & Sensors Teach by showing h CAD and SOA Weldingdevelopments developments and applications Coworker scenario Hyperflexible cell Cognitive factory 1
3 think about SMEs 99.8% 80.8% 65% companies employment GDP
4 think about SMEs
5 think about SMEs Video at





6 think about SMEs Unit Costs 1,000 robot automation 100 automated transfer line Unit cost reduction SMErobot automation 3 Flexibility increase 4 manual manufacturing Units/Year ,000 10, ,000 1,000,000
7 index introduction industrial robots and programming? where are the problems? a few introductory and illustrative examples scenarios: coworker scenario, hyperflexible cell, cognitive factory programming input-output devices sensors and force-control high-level programming: CAD based programming, SOA teach-by-demonstration Welding developments and applications industrial cases long-term challenges
8 introduction Industrial robots are considered as a cornerstone of competitive manufacturing which h aims to combine high h productivity, it quality and adaptability at minimal i cost. In 2007 more than one million industrial robot installations were reported with automotive industries the predominant users with a share of more than 60 %. However, high-growth-industries (in life-sciences, electronics, solar cells, food, and logistics) and emerging manufacturing processes (gluing, coating, laser-based processes, precision assembly etc.) will increasingly depend on advanced robot technology. The production of industrial robots on the one hand, and the planning, integration and operation of robot workcells on the other hand are largely independent engineering tasks. In order to be produced in sufficiently large quantities, a robot design should meet the requirements for the widest set of potential applications. Since this is difficult in practice, we can find specially designed robots for assembly, handling, welding, painting, palletizing, machining, etc.
9 introduction Generally, a robot workcell consists of one or more robots with controllers and robot peripherals: grippers or tools, safety devices, sensors, and material transfer components for moving and presenting parts. Typically, the cost of a complete robot workcell is typically four times the cost of the robots alone. A robot workcell is usually the result of customized planning, integration, programming and configuration, requiring significant engineering expertise. Standardized engineering methods, tools, and best practice examples have become available to reduce costs and provide more predictable performance. Today s industrial robots are mainly the result of the requirements of capital-intensive large-volume manufacturing, mainly defined by automotive, electronics and electrical goods industries. Future industrial robots will not be a mere extrapolation of today s designs with respect to features and performance data, but will rather follow new design principles addressing a wider range of application areas and industries. At the same time, new technologies, particularly from the IT world, will have an increasing impact on the design, performance and cost of future industrial robots.
10 introduction International and national standards now help to quantify robot performance, define safety precautions, geometry and media interfaces. Most robots operate behind secure barriers to keep people at a safe distance. Recently, improved safety standards have allowed direct human-robot collaboration enabling robots and human factory workers to share the same space in safety.



11 brief history The invention of the industrial robot dates back to 1954 when George Devol filed a patent t on a Programmed darticle Transfer. After teaming up with Joseph Engelberger, the first robot company, Unimation, was founded which put the first robot into service at a General Motors plant in 1961 for extracting parts from a die casting machine. Most of the hydraulically actuated Unimates were sold through the following years for workpiece handling and for spotwelding of car bodies. An innovation driven industry was born. However, it took many years until this industry became profitable.




12 brief history First introduced in 1973, the IRB-6 has been a breakthrough development as it was the first serial robot product which h combined all-electric-drives l di technology and a microcomputer for programming and motion control. The robot proved very robust. Lifetimes of more than 20 years in harsh productions were reported.





13 brief history The Selective Compliance Assembly Robot Arm (SCARA) is particularly suited for assembly tasks as it combines rigidity idit in the vertical axis and compliance in the horizontal axis. In 1978, the first Hirata AR-300 was put together. The SCARA design combines three or four rotational and one translational axis.
14 brief history In 1974, Cincinnati Milacron introduced the first microcomputer controlled robot. The first T3 ( The Tomorrow Tool ) models used hydraulic drives, later they were replaced by electric motors. The CM robotics division was acquired by ABB in the late 1970s.
15 brief history This 6 axis PUMA (Programmable Universal Machine for Assembly) came close to the dexterity of a human arm. After its launch in 1979 by Unimation it became one of the most popular arms and was used as a reference in robotics research for many years.
16 brief history Spot welding quickly became a primary application for robots as these jobs were particularly l exhausting and hazardous for workers. A typical car body welding line from 1985 is displayed. The car model shown is a French Citroën CX.

17 brief history An automated VCR assembly line (ca. 1989) with SCARAs carrying a turret with multi- gripper tools. Typically five parts are added d by one robot before the VCR is moved to the next station of the fully automated assembly line.
")




18 brief history Parallel kinematic machines (PKM) represent an interesting approach to achieve high stiffness at low inertia, thus allowing accurate, high h speed motions. Initially suggested by Clavel this 4 axis robot is used for high speed pick-and-place tasks. The robot reaches accelerations of up to 10 g.





19 brief history The KUKA light-weight robot is the result of a long research and development process towards an arm design with a weight-to-payload t ratio of 1:1. 1 The 7 axis arm which h is suited for human-robot cooperation imitates the dexterity of a human arm.
20 brief history The roboloop of Güdel is a curved-track gantry and transfer system. One or more robot arms circulate as carriers in a closed system. The system can be installed suspended, d in gantry configuration, or as a floor-standing system. A signal bus allows the control and coordination of multiple robo-carriers.



21 brief history Motoman s DA-20 dual-arm robot provides high-speed motion with two six-axis arms that t provide enhanced, human-like flexibility of movement. The robot also provides jigless operation with one robot arm holding part while the other performs operations on the held part.





22 brief history In parallel to industrial robots Automated Guided Vehicles (AGVs) have emerged. These mobile robots are used for moving workpieces or loading equipment from point to point. Within the concept of automated flexible manufacturing systems (FMS) AGVs have become an important part of their routing flexibility. Initially AGVs relied on prepared floors such as embedded wires or magnets for motion guidance. Meanwhile, freely navigating AGVs are used in large scale manufacturing and logistics. Usually, their navigation is based on laser scanners which provide an accurate two-dimensional map of the actual environment for self localization and obstacle avoidance. Early on combinations of AGVs and robot arms were realized to automatically load and unload machine tools. Only in some selected environments such as (un-)loading process equipment in the semiconductor industry, these mobile arms were economically advantageous.
23 brief history By 2007, the evolution of industrial robots was marked by the following main trends: The average robot unit price fell to about one third of its equivalent price in 1990 which means that automation is becoming more affordable. At the same time, the robot performance such as speed, load capacity, mean-time-between-failure (MTBF) has dramatically improved. These improvements provide a faster return on investment, particularly for small, short-run batch production. Off-the-shelf components from PC technologies, consumer software and the IT industry have contributed to improved performance-cost ratios. Today, most manufacturers integrate PC- based processors in their controllers as well as PC- related software for programming, communication, simulation, and maintenance. Multiple robots can be programmed and synchronized in real-time by one controller which allows robots to precisely cooperate on a single workpiece. Increasingly, vision systems for object identification, localization, and quality control become an integral part of the robot controller. Robots are networked by fieldbuses or Ethernet for control, configuration, and maintenance.
24 brief history New financing arrangements allow end-users to rent a robot or even have a robot workcell operated by a specialized company or even the robot supplier in order to reduce risks or to save on investment capital. Training and education programmes have become important services to the end- users to increase acceptance of robot technology. Specific multimedia material and courses aim at educating industrial engineers and workforce to effectively plan, operate and maintain industrial robot workcells.





25 Typical applications Welding Painting Car body assembly Material transfer automation
26 Non-traditional: been picking A scene containing the objects is acquired by a 3D-sensor e.g. based on the laser triangulation principle. Beforehand the CAD-object-model has been virtually turned in discrete spatial angles in an off-line calculation. Feature histograms for each view are generated and stored in a database. A best match between actual feature histograms and the simulated sets of histograms determines the location of the object. A grasp has to be selected and a collision-free trajectory is generated. A typical cycle time of a location process is between 1 and 3 s.













27 Non-typical: Machining In this example, the forming process of metal sheets is based on an oscillating stamp (amplitude 1 mm, 50 Hz frequency) which locally plastifies the metal in incremental steps. From the CAD model (top left), the robot s trajectories are calculated on the basis of specific material models (bottom left). Each line represents a part of the tool trajectory. The robot s program is calculated automatically off-line and communicated to the robot controller when required.






28 Non-typical: HMI Inside a regular workcell which is secured by light curtains, the robot handles gear boxes at regular speed in fully automated mode. Upon approaching the light curtain at reduced speed, the worker grasps the safety switch which activates both the reduced-speed mode and the force-torque sensor. The worker guides the robot almost effortlessly l by its handle so that t the gear-box is balanced with precision into the rear axle frame for final assembly. Robot with gripper Light-curtain Safety switch/handle Rear axle Workpiece support Laserscanner (hidden) Protected area Pictures: Fraunhofer IPA
29 programming Problem: We cannot instruct a robot in the same way that one would instruct a human worker how to carry out a task. More specifically, as a wish-list that we will come back to at the end of the chapter, we would like to teach robots by: Manually guiding the robot to the positions of interest, or even along the desired paths or trajectories if human accuracy is enough. Having simple ways to make use of CAD data whenever available. Using different complementary modalities (paths of communication between the human and the robot), such as speech and gestures. Choreographing the task movements, for instance loops and conditions, without requiring extensive programming competencies. Means of describing acceptable variation, e.g. as expected or normal deviations from the nominal path. Specification of how external sensing should be used for new types of motions or for handling unknown variation.
30 programming We work with robots but we really don t cooperate with them... We are still in the early stages of the coworker scenario.
31 programming Example: A CAD application could be the environment used for specifying how the robot should perform the required operations on the specified parts. This is not quite tasklevel programming since human operators do the overall planning. CAD software packages are powerful 3D tools and are now very common among manufacturing companies. Consequently, using those tools for robot programming is desirable since the operator may start the offline programming of the necessary manufacturing operations using the 3D model of the product. video
32 programming Example: A CAD application could be the environment used for specifying how the robot should perform the required operations on the specified parts. This is not quite tasklevel programming since human operators do the overall planning. CAD software packages are powerful 3D tools and are now very common among manufacturing companies. Consequently, using those tools for robot programming is desirable since the operator may start the offline programming of the necessary manufacturing operations using the 3D model of the product. Video in Youtube:
33 examples in Portugal Palete Palete Robô Esteiras de inspecção Robô Palete Palete Eixo Linear PC Vídeo ROCA - results Other Example



34 examples in Portugal IVO: Demo Prototype Tool Video in Youtube:















35 examples in Portugal
36 industrial WP5: SOA robot architectures programming Programming needs to be easier and accessible to any user SMErobot HLP framework
37 HLP: High-Level Programming The high-level programming (HLP) concept applied to industrial robots means programming by any type of user (not restricted to specialists), independence of the platform and higher levels of abstraction. In fact, HLP can be understood as a set of techniques (offered probably has reusable software components) used to program SME (small and medium enterprises) based manufacturing cells, which h hide from the programmer the tricky details about how to obtain the machine code necessary to implement agile manufacturing.
38 HLP: High-Level Programming Integrate robot programming with cell programming. This means introducing process information into the programming effort, extracting ti from there the detailed d system programming necessary to achieve the required operation; Integrate user interface devices making the maximum out of them and integrating easily their functionality: plug-and-produce concepts are here fundamental; Facilitate the re-programming task. The re-programming of industrial robotic systems is still a difficult, costly, and time consuming operation. In order to increase flexibility, a common approach is to consider the work-cell programming at a high level of abstraction, which enables a description of the sequence of actions at a task-level.
39 HLP: High-Level Programming Using XML forms, including grammars, state charts, etc.. XML is a standard that can be used to specify manufacturing actions for the complete work cell without t writing code, and without generating binary code. Using CAD packages to program robotic cells. This solution is an interesting approach since CAD packages are available at SMEs and users are usually prepared to use it. Code generation can be available, but it could also be based on services, or RPC/XIRP calls. Using Service oriented architectures (SOA). One of the things that a SOA should be is a suitable platform for the development of HLP features, which can occur during orchestration of services when assembling a program.. One of the keys for HLP is environment sensibility which is easily reached with a hot plug-and-play discovery as we found in UPnP. In this scenario UPnP -discovery (peer-to-peer) takes advantage.
40 HLP: High-Level Programming Using teaching by demonstration techniques. This approach includes all the techniques that t require the user to program the robot starting ti by teaching the motions and dealing with the obtained results at a higher level. In fact, while it is possible to record position and orientation data directly in the working scenario, all other interactions shall be defined on a high level: integration of peripherals, increasing the quality of the trajectory and adopting the program to the specific process. These interactions shall take place on a high level of autonomy or interaction with the user. Integrating IO devices and systems: portable devices, speech interfaces, etc. This means the possibility to include these devices into the same high-level framework without going into the tricky details about how to program them, which can be done just by adopting SOA on a plug-and-produce environment.
41 For example using speech Video in Youtube: Teach-by-show robot-by-phone
42 HLP: High-Level Programming - speech





 and a few MOTOMAN")

43 industrial WP1: Speech robot programming Interface HLP: High-Level Programming - speech - Working based on XML grammars - Actually using Microsoft SAPI 5.3, but it s independent of SR and TTS engines. - Fully functional for English and Portuguese - Fully tested at laboratory, using 80dB noise levels - Fully tested under Windows Xp, Windows CE and Windows Mobile 2003/ Fully tested using ABB robots (S4 and IRC5 controllers) and a few MOTOMAN robots (latest controller only) - Cooperation established with MLDC Microsoft Language Development Centre to add dictation features to upgrade the actual command based approach.




44 WP1: Speech Interface industrial robot programming PDA interfaces HLP: High-Level Programming PDA interfaces - PDA interfaces based on TCP, UDP and RPC sockets. - Work with any robot controller - Fully programmable, using regular programming tools: VB, C#, C++ - Fully tested on PDAs running WinCE - Developments can be exported to any WinCE device. - Useful for robot programming: teach and program Videos: Speech withpda PDA Scripts video PDA CAM video
45
46 industrial WP5: SOA robot architectures programming For example using SOA Service Oriented Architectures Test Bed with UPnP already working Conveyor, Camera, Robot Abb IRC5. Cell Programmer provide support for simple service orchestration, with friendly interface. 45






47 industrial WP5: SOA robot architectures programming For example using SOA Service Oriented Architectures Test Bed with UPnP already working Voice Interface fully UPnP integrated. PDA Interface (development of an UPnP Stack for WCE5 (.Net Compact Framework 2.0). 46
48 industrial WP5: SOA robot architectures programming For example using SOA Service Oriented Architectures Current Work (finished in December 2007): Implementing Microsoft s Robotics Studio SOA Decentralized System Services DSS in the same Test Bed. Support the SOA implementation with adequate tools: Extend Cell Programmer features: Concurrency support, logical operators (And, Or..). Extend the automatic UPnP device generation to the robot using Compiler Technology. Combine with HLP: Support High Level Programming HLP underlying SOA. Video Video in Youtube:

49 industrial WP5: SOA robot architectures programming For example using SOA Service Oriented Architectures WP5: SOA architectures Generating UPnP services from RAPID UPnP network




50 SOA industrial WP5: and SCXML SOA robot architectures programming For example using SOA Service Oriented Architectures



51 industrial WP5: SOA robot architectures programming For example using SOA Service Oriented Architectures

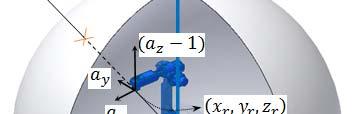

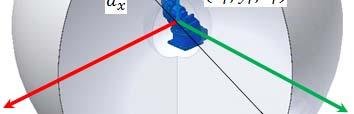
52 For example using accelerometers
53 Industrial cases Video in Youtube:





54 HLP: High-Level Programming coworker scenario Visual and Auditory feedback Programming Using CAD Files Simulation of the Reality Man Machine Interface Visual and Vibrotactile feedback Tactile Sense Camera Smart Tools Force/Torque Sensor
55 HLP: High-Level Programming It is common to say that industrial robots perform preprogrammed actions in a specifically prepared and highly structured environment, leading to the conclusion that they have no need for perception and on-the-task human interaction. This somehow traditional idea is drastically changed in the coworker scenario where robots and humans cooperate to fulfill a common goal. In fact, in that scenario the environment is less structured and the human operator is supposed to program the robot as the work unfolds. This means that the robotic systems require some level o autonomy so that they can handle the information about the environment and the human user, and must be programmable on-the-task (on-line) using a natural and very intuitive user interface. Such an interface may be based on the robot s recognition of user instructions, which probably means the adoption of speech interfaces, vision systems for object or user detection/recognition and gesture and gaze identification, and the utilization of several physical interaction devices (force, touch).
56 HLP: High-Level Programming CAD + digital pens





57 HLP: High-Level Programming digital PENS link
58 Application Sensors PC (using ActiveX component and/or TPC-IP sockets) Actuators User Interface Object A IO, fieldbus or specific card driver PCROB TCP/UDP Client Message Handler Message Queue Object B User Interface Object A OPC AE server Object B Server Portmap OPC client Application (OPC client) Event: Asynchronous call OPC DA server Asynchronous call and answer Local Area Network PLC Robot Controller Sensors Services Server IO PLC-like interface and fieldbus Server Robot Control System Services Sensors Actuators Actuators Robot
59 Welding application very simple case and example o o o o o Currently, since the vast majority of companies use CAD programs to design their products, information from CAD files could be used to generate robot welding programs. That is, the CAD application could be the environment used for specifying the way the welding robots should handle the production of the specific parts. Since most welding engineers are familiarized with CAD, this could be a nice way to proceed. The application presented here enables the user to work on the CAD file, defining both the welding path and the approach/escape paths between two consecutive welds, and organize them in the desired welding sequence. When definition is complete, a small program, written in Visual Basic, extracts motion information from the CAD file and converts it to robot commands that can be immediately tested for detailed tuning. A set of tools is then available to speed up necessary corrections, which can be made on-line with the robot moving. After a few simulations (robot performing all motions without welding) the program is ready for production. o The whole process can be completed in just some minutes to a few hours, depending on the size and complexity of the component to be welded, representing a huge reduction of programming and setup time. Besides most of the work is easy off-line programming. 58

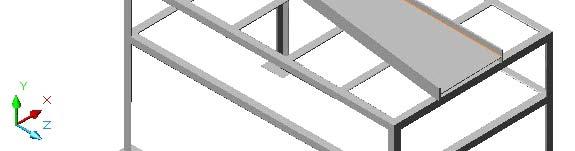





60 Welding application: CAD interface y Z x 59
61 Welding application: CAD interface 60
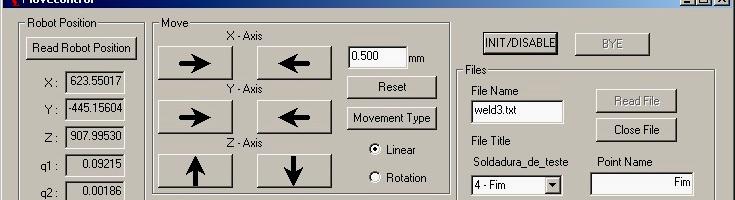
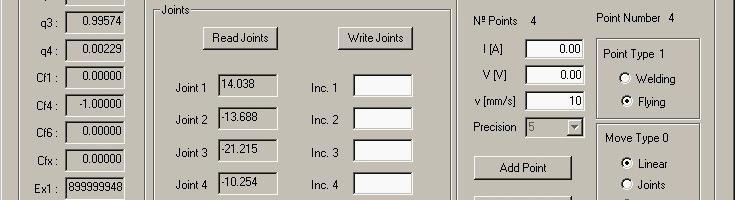
62 Welding application: CAD interface inition Welding point def Welding_Test 4 Point 1 Origin Name of the file Number of points Point number X Name of the point Type of point welding 0, fly-by - 1) x value y value zvalue Quaternion q1 Quaternion q2 Quaternion q3 Quaternion q4 cf1 cf4 cf6 cfx External joint 1 External joint 1 External joint 1 External joint 1 External joint 1 External joint 1 Current [A] Voltage [V] Velocity [mm/s] Precision Type of motion (linear 0, circular 1, joints - 2) 61
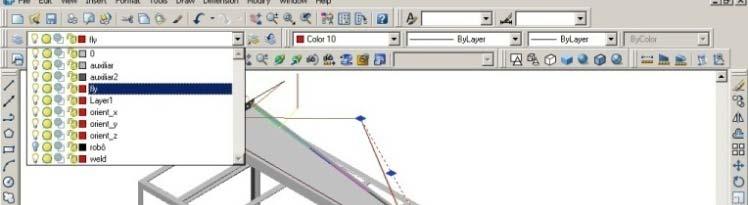

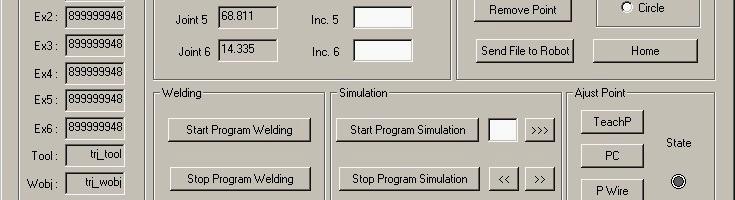



63 Welding application: CAD interface 62 AutoCAD 2004 Visual Basic.NET Visual C++.NET






64 Welding application: CAD interface 63
65 Welding application: CAD interface Video in Youtube: 64








66 Industrial cases

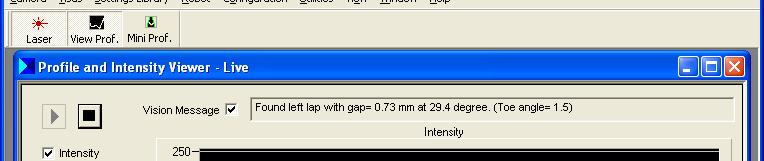
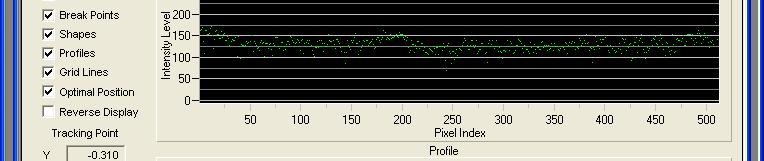

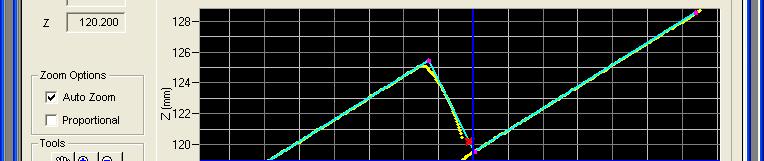


67 Software for process monitoring, seam tracking and quality control



68 Software for process monitoring, seam tracking and quality control Video in Youtube:





69 vídeos The perspective p here is the coworker scenario. Soporcel PM2 PM1 SSGP Rebarbagem Modelo Real Albert - reconfiguração SMErobot video Speech with PDA Speech Welding - vídeo Rita Catita -vídeo Rita Catita Mobile Speech with noise industrial Demo at Stuttgart - vídeo PDA Scripts - vídeo Demo Biomédica - vídeo Voice4Robotics vídeo IA20 - demo Humanoide vídeo HFeira - vídeo YY XX Videos:
70 Industrial cases Roca tanques Roca caixas SSGP rebarbagem SSGP final SSGP Intermédio SSGP Jardel SOPORCEL nova SOPORCEL Velha Videos:
71 Industrial cases Conclusions Industrial Robotics came a long way since the seventies. The current challenges were briefly presented here: 1. Ways to interface users (usually non-skilled users); 2. Use of devices for more friendly integration of machines and human operators; 3. Programming using CAD packages and other current engineering tools; 4. New sensors, intelligent sensors; 5. High Level Programming. The objective is to further develop the coworker scenario and establish the grounds for the future scenario where robots have cognitive capabilities and can truly cooperate, advise and help humans: cognitive factory scenario. To download this presentation:
72 Productive Robotics C t t Contact: J. Norberto Pires jnp@robotics.dem.uc.pt
Robot-by-voice: Experiments on commanding an industrial robot using the human voice
 Robot-by-voice: Experiments on commanding an industrial robot using the human voice J. Norberto Pires Mechanical Engineering Department and Mechanical Engineering Research Center (a research center from
Robot-by-voice: Experiments on commanding an industrial robot using the human voice J. Norberto Pires Mechanical Engineering Department and Mechanical Engineering Research Center (a research center from
INDUSTRIAL ROBOTS PROGRAMMING: BUILDING APPLICATIONS FOR THE FACTORIES OF THE FUTURE
 INDUSTRIAL ROBOTS PROGRAMMING: BUILDING APPLICATIONS FOR THE FACTORIES OF THE FUTURE INDUSTRIAL ROBOTS PROGRAMMING: BUILDING APPLICATIONS FOR THE FACTORIES OF THE FUTURE J. Norberto Pires Mechanical Engineering
INDUSTRIAL ROBOTS PROGRAMMING: BUILDING APPLICATIONS FOR THE FACTORIES OF THE FUTURE INDUSTRIAL ROBOTS PROGRAMMING: BUILDING APPLICATIONS FOR THE FACTORIES OF THE FUTURE J. Norberto Pires Mechanical Engineering
The robot capable of understanding human-like instructions
 The European Robot Initiative for Strengthening the Competitiveness of SMEs in Manufacturing The robot capable of understanding human-like instructions Contents of this Presentation Introduction Human
The European Robot Initiative for Strengthening the Competitiveness of SMEs in Manufacturing The robot capable of understanding human-like instructions Contents of this Presentation Introduction Human
Cognitive Systems and Robotics: opportunities in FP7
 Cognitive Systems and Robotics: opportunities in FP7 Austrian Robotics Summit July 3, 2009 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media European
Cognitive Systems and Robotics: opportunities in FP7 Austrian Robotics Summit July 3, 2009 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media European
High-Level Programming for Industrial Robotics: using Gestures, Speech and Force Control
 High-Level Programming for Industrial Robotics: using Gestures, Speech and Force Control Pedro Neto, J. Norberto Pires, Member, IEEE Abstract Today, most industrial robots are programmed using the typical
High-Level Programming for Industrial Robotics: using Gestures, Speech and Force Control Pedro Neto, J. Norberto Pires, Member, IEEE Abstract Today, most industrial robots are programmed using the typical
John Henry Foster INTRODUCING OUR NEW ROBOTICS LINE. Imagine Your Business...better. Automate Virtually Anything jhfoster.
 John Henry Foster INTRODUCING OUR NEW ROBOTICS LINE Imagine Your Business...better. Automate Virtually Anything 800.582.5162 John Henry Foster 800.582.5162 What if you could automate the repetitive manual
John Henry Foster INTRODUCING OUR NEW ROBOTICS LINE Imagine Your Business...better. Automate Virtually Anything 800.582.5162 John Henry Foster 800.582.5162 What if you could automate the repetitive manual
2014 Market Trends Webinar Series
 Robotic Industries Association 2014 Market Trends Webinar Series Watch live or archived at no cost Learn about the latest innovations in robotics Sponsored by leading robotics companies 1 2014 Calendar
Robotic Industries Association 2014 Market Trends Webinar Series Watch live or archived at no cost Learn about the latest innovations in robotics Sponsored by leading robotics companies 1 2014 Calendar
 UNIT-1 INTRODUCATION The field of robotics has its origins in science fiction. The term robot was derived from the English translation of a fantasy play written in Czechoslovakia around 1920. It took another
UNIT-1 INTRODUCATION The field of robotics has its origins in science fiction. The term robot was derived from the English translation of a fantasy play written in Czechoslovakia around 1920. It took another
FUNDAMENTALS ROBOT TECHNOLOGY. An Introduction to Industrial Robots, T eleoperators and Robot Vehicles. D J Todd. Kogan Page
 FUNDAMENTALS of ROBOT TECHNOLOGY An Introduction to Industrial Robots, T eleoperators and Robot Vehicles D J Todd &\ Kogan Page First published in 1986 by Kogan Page Ltd 120 Pentonville Road, London Nl
FUNDAMENTALS of ROBOT TECHNOLOGY An Introduction to Industrial Robots, T eleoperators and Robot Vehicles D J Todd &\ Kogan Page First published in 1986 by Kogan Page Ltd 120 Pentonville Road, London Nl
JEPPIAAR ENGINEERING COLLEGE
 JEPPIAAR ENGINEERING COLLEGE Jeppiaar Nagar, Rajiv Gandhi Salai 600 119 DEPARTMENT OFMECHANICAL ENGINEERING QUESTION BANK VII SEMESTER ME6010 ROBOTICS Regulation 013 JEPPIAAR ENGINEERING COLLEGE Jeppiaar
JEPPIAAR ENGINEERING COLLEGE Jeppiaar Nagar, Rajiv Gandhi Salai 600 119 DEPARTMENT OFMECHANICAL ENGINEERING QUESTION BANK VII SEMESTER ME6010 ROBOTICS Regulation 013 JEPPIAAR ENGINEERING COLLEGE Jeppiaar
Robotics 1 Industrial Robotics
 Robotics 1 Industrial Robotics Prof. Alessandro De Luca Robotics 1 1 What is a robot?! industrial definition (RIA = Robotic Institute of America) re-programmable multi-functional manipulator designed to
Robotics 1 Industrial Robotics Prof. Alessandro De Luca Robotics 1 1 What is a robot?! industrial definition (RIA = Robotic Institute of America) re-programmable multi-functional manipulator designed to
ROBOTIC AUTOMATION Imagine Your Business...better. Automate Virtually Anything
 John Henry Foster ROBOTIC AUTOMATION Imagine Your Business...better. Automate Virtually Anything 800.582.5162 John Henry Foster 800.582.5162 At John Henry Foster, we re devoted to bringing safe, flexible,
John Henry Foster ROBOTIC AUTOMATION Imagine Your Business...better. Automate Virtually Anything 800.582.5162 John Henry Foster 800.582.5162 At John Henry Foster, we re devoted to bringing safe, flexible,
* Intelli Robotic Wheel Chair for Specialty Operations & Physically Challenged
 ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ROBOTICS, Jump to the next generation
 ROBOTICS, Jump to the next generation Erich Lohrmann Area Director Latin America KUKA Roboter GmbH COPY RIGHTS by Erich Lohrmann Human Evolution Robotic Evolution (by KUKA) International Conference on
ROBOTICS, Jump to the next generation Erich Lohrmann Area Director Latin America KUKA Roboter GmbH COPY RIGHTS by Erich Lohrmann Human Evolution Robotic Evolution (by KUKA) International Conference on
NCCT IEEE PROJECTS ADVANCED ROBOTICS SOLUTIONS. Latest Projects, in various Domains. Promise for the Best Projects
 NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
Humanoid robot. Honda's ASIMO, an example of a humanoid robot
 Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
How To Create The Right Collaborative System For Your Application. Corey Ryan Manager - Medical Robotics KUKA Robotics Corporation
 How To Create The Right Collaborative System For Your Application Corey Ryan Manager - Medical Robotics KUKA Robotics Corporation C Definitions Cobot: for this presentation a robot specifically designed
How To Create The Right Collaborative System For Your Application Corey Ryan Manager - Medical Robotics KUKA Robotics Corporation C Definitions Cobot: for this presentation a robot specifically designed
Introduction to Robotics in CIM Systems
 Introduction to Robotics in CIM Systems Fifth Edition James A. Rehg The Pennsylvania State University Altoona, Pennsylvania Prentice Hall Upper Saddle River, New Jersey Columbus, Ohio Contents Introduction
Introduction to Robotics in CIM Systems Fifth Edition James A. Rehg The Pennsylvania State University Altoona, Pennsylvania Prentice Hall Upper Saddle River, New Jersey Columbus, Ohio Contents Introduction
Introduction to Robotics
 Introduction to Robotics Analysis, systems, Applications Saeed B. Niku Chapter 1 Fundamentals 1. Introduction Fig. 1.1 (a) A Kuhnezug truck-mounted crane Reprinted with permission from Kuhnezug Fordertechnik
Introduction to Robotics Analysis, systems, Applications Saeed B. Niku Chapter 1 Fundamentals 1. Introduction Fig. 1.1 (a) A Kuhnezug truck-mounted crane Reprinted with permission from Kuhnezug Fordertechnik
Intelligent interaction
 BionicWorkplace: autonomously learning workstation for human-machine collaboration Intelligent interaction Face to face, hand in hand. The BionicWorkplace shows the extent to which human-machine collaboration
BionicWorkplace: autonomously learning workstation for human-machine collaboration Intelligent interaction Face to face, hand in hand. The BionicWorkplace shows the extent to which human-machine collaboration
Cognitive robots and emotional intelligence Cloud robotics Ethical, legal and social issues of robotic Construction robots Human activities in many
 Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
User-Friendly Task Creation Using a CAD Integrated Robotic System on a Real Workcell
 User-Friendly Task Creation Using a CAD Integrated Robotic System on a Real Workcell Alireza Changizi, Arash Rezaei, Jamal Muhammad, Jyrki Latokartano, Minna Lanz International Science Index, Industrial
User-Friendly Task Creation Using a CAD Integrated Robotic System on a Real Workcell Alireza Changizi, Arash Rezaei, Jamal Muhammad, Jyrki Latokartano, Minna Lanz International Science Index, Industrial
Since FLEXIBLE MANUFACTURING SYSTEM
 Since 1992 www.hytecheducation.in FLEXIBLE MANUFACTURING SYSTEM Flexible Manufacturing System with Conveyor Floor mounted machines Vertical axes are with brake motors Pneumatic grippers for loading and
Since 1992 www.hytecheducation.in FLEXIBLE MANUFACTURING SYSTEM Flexible Manufacturing System with Conveyor Floor mounted machines Vertical axes are with brake motors Pneumatic grippers for loading and
The safe & productive robot working without fences
 The European Robot Initiative for Strengthening the Competitiveness of SMEs in Manufacturing The safe & productive robot working without fences Final Presentation, Stuttgart, May 5 th, 2009 Objectives
The European Robot Initiative for Strengthening the Competitiveness of SMEs in Manufacturing The safe & productive robot working without fences Final Presentation, Stuttgart, May 5 th, 2009 Objectives
CAPACITIES FOR TECHNOLOGY TRANSFER
 CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
Introduction to robotics. Md. Ferdous Alam, Lecturer, MEE, SUST
 Introduction to robotics Md. Ferdous Alam, Lecturer, MEE, SUST Hello class! Let s watch a video! So, what do you think? It s cool, isn t it? The dedication is not! A brief history The first digital and
Introduction to robotics Md. Ferdous Alam, Lecturer, MEE, SUST Hello class! Let s watch a video! So, what do you think? It s cool, isn t it? The dedication is not! A brief history The first digital and
Chapter 1 Introduction
 Chapter 1 Introduction It is appropriate to begin the textbook on robotics with the definition of the industrial robot manipulator as given by the ISO 8373 standard. An industrial robot manipulator is
Chapter 1 Introduction It is appropriate to begin the textbook on robotics with the definition of the industrial robot manipulator as given by the ISO 8373 standard. An industrial robot manipulator is
UNIT VI. Current approaches to programming are classified as into two major categories:
 Unit VI 1 UNIT VI ROBOT PROGRAMMING A robot program may be defined as a path in space to be followed by the manipulator, combined with the peripheral actions that support the work cycle. Peripheral actions
Unit VI 1 UNIT VI ROBOT PROGRAMMING A robot program may be defined as a path in space to be followed by the manipulator, combined with the peripheral actions that support the work cycle. Peripheral actions
CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM
 CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM Aniket D. Kulkarni *1, Dr.Sayyad Ajij D. *2 *1(Student of E&C Department, MIT Aurangabad, India) *2(HOD of E&C department, MIT Aurangabad, India) aniket2212@gmail.com*1,
CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM Aniket D. Kulkarni *1, Dr.Sayyad Ajij D. *2 *1(Student of E&C Department, MIT Aurangabad, India) *2(HOD of E&C department, MIT Aurangabad, India) aniket2212@gmail.com*1,
Robot application with Gema
 Metallbau Ferk, Austria Robot application with Gema When maximum flexibility and perfect coating quality are required, robots are the solution. Multi-axis robots specially developed for the coating industry
Metallbau Ferk, Austria Robot application with Gema When maximum flexibility and perfect coating quality are required, robots are the solution. Multi-axis robots specially developed for the coating industry
Sensors and Sensing Motors, Encoders and Motor Control
 Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 13.11.2014
Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 13.11.2014
Robotics: Applications
 Lecture 01 Feb. 04, 2019 Robotics: Applications Prof. S.K. Saha Dept. of Mech. Eng. IIT Delhi Outline Introduction Industrial applications Other applications Summary Introduction 90% robots in factories:
Lecture 01 Feb. 04, 2019 Robotics: Applications Prof. S.K. Saha Dept. of Mech. Eng. IIT Delhi Outline Introduction Industrial applications Other applications Summary Introduction 90% robots in factories:
Sensors and Sensing Motors, Encoders and Motor Control
 Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 05.11.2015
Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 05.11.2015
Chapter 14 Automation of Manufacturing Processes and Systems
 Chapter 14 Automation of Manufacturing Processes and Systems Topics in Chapter 14 FIGURE 14.1 Outline of topics described in this chapter. Date 1500Ğ1600 1600Ğ1700 1700Ğ1800 1800Ğ1900 Development Water
Chapter 14 Automation of Manufacturing Processes and Systems Topics in Chapter 14 FIGURE 14.1 Outline of topics described in this chapter. Date 1500Ğ1600 1600Ğ1700 1700Ğ1800 1800Ğ1900 Development Water
Human-like Assembly Robots in Factories
 5-88 June Symposium on Japan America Frontier of Engineering (JAFOE) Robotics Session: Human-like Assembly Robots in Factories 8th June Robotics Technology R&D Group Shingo Ando 0520 Introduction: Overview
5-88 June Symposium on Japan America Frontier of Engineering (JAFOE) Robotics Session: Human-like Assembly Robots in Factories 8th June Robotics Technology R&D Group Shingo Ando 0520 Introduction: Overview
PHYSICAL ROBOTS PROGRAMMING BY IMITATION USING VIRTUAL ROBOT PROTOTYPES
 Bulletin of the Transilvania University of Braşov Series I: Engineering Sciences Vol. 6 (55) No. 2-2013 PHYSICAL ROBOTS PROGRAMMING BY IMITATION USING VIRTUAL ROBOT PROTOTYPES A. FRATU 1 M. FRATU 2 Abstract:
Bulletin of the Transilvania University of Braşov Series I: Engineering Sciences Vol. 6 (55) No. 2-2013 PHYSICAL ROBOTS PROGRAMMING BY IMITATION USING VIRTUAL ROBOT PROTOTYPES A. FRATU 1 M. FRATU 2 Abstract:
KORE: Basic Course KUKA Official Robot Education
 Training KUKAKA Robotics USA KORE: Basic Course KUKA Official Robot Education Target Group: School and College Students Issued: 19.09.2014 Version: KORE: Basic Course V1.1 Contents 1 Introduction to robotics...
Training KUKAKA Robotics USA KORE: Basic Course KUKA Official Robot Education Target Group: School and College Students Issued: 19.09.2014 Version: KORE: Basic Course V1.1 Contents 1 Introduction to robotics...
GF Machining Solutions Speed of Development : The Future of Machine Building. Sergei Schurov 23/06/2016
 GF Machining Solutions Speed of Development : The Future of Machine Building Sergei Schurov 23/06/2016 Heritage Innovation Outlook Machine Tools Industry: Journey Through the Time Heritage Swiss Trains
GF Machining Solutions Speed of Development : The Future of Machine Building Sergei Schurov 23/06/2016 Heritage Innovation Outlook Machine Tools Industry: Journey Through the Time Heritage Swiss Trains
FANUC America Demonstrates Spot Welding with its Gakushu (Learning) Robots
 Robots") FANUC America Demonstrates Spot Welding with its Gakushu (Learning) Robots at IMTS 2014 For Immediate Release ROCHESTER HILLS, Mich., Sept. 8, 2014 FANUC America Corporation demonstrates spot welding with
FANUC America Demonstrates Spot Welding with its Gakushu (Learning) Robots at IMTS 2014 For Immediate Release ROCHESTER HILLS, Mich., Sept. 8, 2014 FANUC America Corporation demonstrates spot welding with
Collaborative Robots and the factory of the future. Nicolas De Keijser Assembly & Test Business Line Manager, USA
 2018-09-26 Collaborative Robots and the factory of the future Nicolas De Keijser Assembly & Test Business Line Manager, USA Strong Growth for Collaborative Robots Forecasted October 1, 2018 Slide 2 ABB
2018-09-26 Collaborative Robots and the factory of the future Nicolas De Keijser Assembly & Test Business Line Manager, USA Strong Growth for Collaborative Robots Forecasted October 1, 2018 Slide 2 ABB
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS. Sergii Bykov Technical Lead Machine Learning 12 Oct 2017
 23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
Advanced Robotics Introduction
 Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
ROBOTIC MANIPULATION AND HAPTIC FEEDBACK VIA HIGH SPEED MESSAGING WITH THE JOINT ARCHITECTURE FOR UNMANNED SYSTEMS (JAUS)
") ROBOTIC MANIPULATION AND HAPTIC FEEDBACK VIA HIGH SPEED MESSAGING WITH THE JOINT ARCHITECTURE FOR UNMANNED SYSTEMS (JAUS) Dr. Daniel Kent, * Dr. Thomas Galluzzo*, Dr. Paul Bosscher and William Bowman INTRODUCTION
ROBOTIC MANIPULATION AND HAPTIC FEEDBACK VIA HIGH SPEED MESSAGING WITH THE JOINT ARCHITECTURE FOR UNMANNED SYSTEMS (JAUS) Dr. Daniel Kent, * Dr. Thomas Galluzzo*, Dr. Paul Bosscher and William Bowman INTRODUCTION
Flexible Manufacturing Systems (FMS)
") Flexible Manufacturing Systems (FMS) Bridging the Gap Between Classroom and Industry Flexible solutions for educating and training students in the principles and technologies of advanced manufacturing
Flexible Manufacturing Systems (FMS) Bridging the Gap Between Classroom and Industry Flexible solutions for educating and training students in the principles and technologies of advanced manufacturing
MATLAB is a high-level programming language, extensively
 1 KUKA Sunrise Toolbox: Interfacing Collaborative Robots with MATLAB Mohammad Safeea and Pedro Neto Abstract Collaborative robots are increasingly present in our lives. The KUKA LBR iiwa equipped with
1 KUKA Sunrise Toolbox: Interfacing Collaborative Robots with MATLAB Mohammad Safeea and Pedro Neto Abstract Collaborative robots are increasingly present in our lives. The KUKA LBR iiwa equipped with
Two ranges of 6-CNC axis robots For IMM from 20T to 5000 T
 Two ranges of 6-CNC axis robots For IMM from 20T to 5000 T Sepro is innovating and offering two complementary ranges of 6-axis robots: - The Sepro-Stäubli range for equipping IMM from 20 to 1300 T - The
Two ranges of 6-CNC axis robots For IMM from 20T to 5000 T Sepro is innovating and offering two complementary ranges of 6-axis robots: - The Sepro-Stäubli range for equipping IMM from 20 to 1300 T - The
Industry 4.0. Advanced and integrated SAFETY tools for tecnhical plants
 Industry 4.0 Advanced and integrated SAFETY tools for tecnhical plants Industry 4.0 Industry 4.0 is the digital transformation of manufacturing; leverages technologies, such as Big Data and Internet of
Industry 4.0 Advanced and integrated SAFETY tools for tecnhical plants Industry 4.0 Industry 4.0 is the digital transformation of manufacturing; leverages technologies, such as Big Data and Internet of
ME7752: Mechanics and Control of Robots Lecture 1
 ME7752: Mechanics and Control of Robots Lecture 1 Instructor: Manoj Srinivasan Office: E340 Scott Laboratory Email: srinivasan.88@osu.edu ( PDF posted. In the PDF, if there are no links to videos, do a
ME7752: Mechanics and Control of Robots Lecture 1 Instructor: Manoj Srinivasan Office: E340 Scott Laboratory Email: srinivasan.88@osu.edu ( PDF posted. In the PDF, if there are no links to videos, do a
Chapter 1 Introduction to Robotics
 Chapter 1 Introduction to Robotics PS: Most of the pages of this presentation were obtained and adapted from various sources in the internet. 1 I. Definition of Robotics Definition (Robot Institute of
Chapter 1 Introduction to Robotics PS: Most of the pages of this presentation were obtained and adapted from various sources in the internet. 1 I. Definition of Robotics Definition (Robot Institute of
Towards Interactive Learning for Manufacturing Assistants. Andreas Stopp Sven Horstmann Steen Kristensen Frieder Lohnert
 Towards Interactive Learning for Manufacturing Assistants Andreas Stopp Sven Horstmann Steen Kristensen Frieder Lohnert DaimlerChrysler Research and Technology Cognition and Robotics Group Alt-Moabit 96A,
Towards Interactive Learning for Manufacturing Assistants Andreas Stopp Sven Horstmann Steen Kristensen Frieder Lohnert DaimlerChrysler Research and Technology Cognition and Robotics Group Alt-Moabit 96A,
Software update news about digital manufacturing tools and software
 s Software update news about digital manufacturing tools and software Chahe Bakmazjian Business Team Leader Hypertherm Robotic Software Laurent, Quebec, Canada www.robotmaster.com Programming Robots Gets
s Software update news about digital manufacturing tools and software Chahe Bakmazjian Business Team Leader Hypertherm Robotic Software Laurent, Quebec, Canada www.robotmaster.com Programming Robots Gets
Robotics: Evolution, Technology and Applications
 Robotics: Evolution, Technology and Applications By: Dr. Hamid D. Taghirad Head of Control Group, and Department of Electrical Engineering K.N. Toosi University of Tech. Department of Electrical Engineering
Robotics: Evolution, Technology and Applications By: Dr. Hamid D. Taghirad Head of Control Group, and Department of Electrical Engineering K.N. Toosi University of Tech. Department of Electrical Engineering
Robotics Evolution: From Production Rate to Human Productivity
 Chetan Kapoor Senior Director of Technology Innovation Yaskawa America, Motoman Robotics Division Robotics Evolution: From Production Rate to Human Productivity 2016 YASKAWA America, Inc. YASKAWA.COM 100
Chetan Kapoor Senior Director of Technology Innovation Yaskawa America, Motoman Robotics Division Robotics Evolution: From Production Rate to Human Productivity 2016 YASKAWA America, Inc. YASKAWA.COM 100
EPCA Germany. Cutting Edge Technology. experience matters
 Cutting Machines EPCA Germany Cutting Edge Technology EPCA Germany stands for long year expertise, in-depth knowledge, excellent service quality and understanding of automation processes. With EPCA Germany
Cutting Machines EPCA Germany Cutting Edge Technology EPCA Germany stands for long year expertise, in-depth knowledge, excellent service quality and understanding of automation processes. With EPCA Germany
Development of Multiple-Axes Intelligent Servo Amplifier "PQ"
 1 / 5 SANYO DENKI Technical Report No.6 Nov. 1998 New Products Introduction Development of Multiple-Axes Intelligent Servo Amplifier "PQ" Shigejirou Miyata Nobuo Arakawa Shingo Takeuchi Hidenao Shouda
1 / 5 SANYO DENKI Technical Report No.6 Nov. 1998 New Products Introduction Development of Multiple-Axes Intelligent Servo Amplifier "PQ" Shigejirou Miyata Nobuo Arakawa Shingo Takeuchi Hidenao Shouda
Trade of Sheet Metalwork. Module 7: Introduction to CNC Sheet Metal Manufacturing Unit 2: CNC Machines Phase 2
 Trade of Sheet Metalwork Module 7: Introduction to CNC Sheet Metal Manufacturing Unit 2: CNC Machines Phase 2 Table of Contents List of Figures... 4 List of Tables... 5 Document Release History... 6 Module
Trade of Sheet Metalwork Module 7: Introduction to CNC Sheet Metal Manufacturing Unit 2: CNC Machines Phase 2 Table of Contents List of Figures... 4 List of Tables... 5 Document Release History... 6 Module
APAS assistant. Product scope
 APAS assistant Product scope APAS assistant Table of contents Non-contact human-robot collaboration for the Smart Factory Robots have improved the working world in the past years in many ways. Above and
APAS assistant Product scope APAS assistant Table of contents Non-contact human-robot collaboration for the Smart Factory Robots have improved the working world in the past years in many ways. Above and
Advanced Manufacturing
 Advanced Manufacturing A Roadmap for unlocking future growth opportunities for Australia EXECUTIVE SUMMARY NOVEMBER 2016 www.csiro.au CSIRO FUTURES CSIRO Futures is the strategic advisory and foresight
Advanced Manufacturing A Roadmap for unlocking future growth opportunities for Australia EXECUTIVE SUMMARY NOVEMBER 2016 www.csiro.au CSIRO FUTURES CSIRO Futures is the strategic advisory and foresight
6 System architecture
 6 System architecture is an application for interactively controlling the animation of VRML avatars. It uses the pen interaction technique described in Chapter 3 - Interaction technique. It is used in
6 System architecture is an application for interactively controlling the animation of VRML avatars. It uses the pen interaction technique described in Chapter 3 - Interaction technique. It is used in
ARCHITECTURE AND MODEL OF DATA INTEGRATION BETWEEN MANAGEMENT SYSTEMS AND AGRICULTURAL MACHINES FOR PRECISION AGRICULTURE
 ARCHITECTURE AND MODEL OF DATA INTEGRATION BETWEEN MANAGEMENT SYSTEMS AND AGRICULTURAL MACHINES FOR PRECISION AGRICULTURE W. C. Lopes, R. R. D. Pereira, M. L. Tronco, A. J. V. Porto NepAS [Center for Teaching
ARCHITECTURE AND MODEL OF DATA INTEGRATION BETWEEN MANAGEMENT SYSTEMS AND AGRICULTURAL MACHINES FOR PRECISION AGRICULTURE W. C. Lopes, R. R. D. Pereira, M. L. Tronco, A. J. V. Porto NepAS [Center for Teaching
ROBO-PARTNER: Safe human-robot collaboration for assembly: case studies and challenges
 ROBO-PARTNER: Safe human-robot collaboration for assembly: case studies and challenges Dr. George Michalos University of Patras ROBOT FORUM ASSEMBLY 16 March 2016 Parma, Italy Introduction Human sensitivity
ROBO-PARTNER: Safe human-robot collaboration for assembly: case studies and challenges Dr. George Michalos University of Patras ROBOT FORUM ASSEMBLY 16 March 2016 Parma, Italy Introduction Human sensitivity
FRAUNHOFER INSTITUT FOR MANUFACTURING ENGINEERING AND AUTOMATION IPA DRIVE SYSTEMS AND EXOSKELETONS
 FRAUNHOFER INSTITUT FOR MANUFACTURING ENGINEERING AND AUTOMATION IPA DRIVE SYSTEMS AND EXOSKELETONS WHAT DRIVES US Mobility is a basic human need. As the demographic change continues, this is increasingly
FRAUNHOFER INSTITUT FOR MANUFACTURING ENGINEERING AND AUTOMATION IPA DRIVE SYSTEMS AND EXOSKELETONS WHAT DRIVES US Mobility is a basic human need. As the demographic change continues, this is increasingly
Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular fatigue
Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular fatigue
Chapter 2 High Speed Machining
 Chapter 2 High Speed Machining 1 WHAT IS HIGH SPEED MACHINING (HSM)??? Low Speed High Speed 2 Defined as the use of higher spindle speeds and axis feed rates to achieve high material removal rates without
Chapter 2 High Speed Machining 1 WHAT IS HIGH SPEED MACHINING (HSM)??? Low Speed High Speed 2 Defined as the use of higher spindle speeds and axis feed rates to achieve high material removal rates without
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT
 MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
More Info at Open Access Database by S. Dutta and T. Schmidt
 More Info at Open Access Database www.ndt.net/?id=17657 New concept for higher Robot position accuracy during thermography measurement to be implemented with the existing prototype automated thermography
More Info at Open Access Database www.ndt.net/?id=17657 New concept for higher Robot position accuracy during thermography measurement to be implemented with the existing prototype automated thermography
Special Patterns - Introduction. -Manufacture of large things -Technology Provider
 Special Patterns - Introduction -Manufacture of large things -Technology Provider Deny Tanuwidjaja (M.EngElectronics and Control Systems) 6 Years Robot programming 4 Years Control systems programming 5
Special Patterns - Introduction -Manufacture of large things -Technology Provider Deny Tanuwidjaja (M.EngElectronics and Control Systems) 6 Years Robot programming 4 Years Control systems programming 5
Virtual Engineering: Challenges and Solutions for Intuitive Offline Programming for Industrial Robot
 Virtual Engineering: Challenges and Solutions for Intuitive Offline Programming for Industrial Robot Liwei Qi, Xingguo Yin, Haipeng Wang, Li Tao ABB Corporate Research China No. 31 Fu Te Dong San Rd.,
Virtual Engineering: Challenges and Solutions for Intuitive Offline Programming for Industrial Robot Liwei Qi, Xingguo Yin, Haipeng Wang, Li Tao ABB Corporate Research China No. 31 Fu Te Dong San Rd.,
Theme 2: The new paradigm in robotics safety
 Competitiveness in Emerging Robot Technologies (CEROBOT) The opportunities in safety and robots for SMEs Theme 2: The new paradigm in robotics safety Colin Blackman Simon Forge SCF Associates Ltd Safety
Competitiveness in Emerging Robot Technologies (CEROBOT) The opportunities in safety and robots for SMEs Theme 2: The new paradigm in robotics safety Colin Blackman Simon Forge SCF Associates Ltd Safety
TECNALIA. Robotics for Advanced Manufacturing. ROBOTT-NET Robotizar Consideraciones a tener en cuenta antes de empezar
 TECNALIA Robotics for Advanced Manufacturing ROBOTT-NET Robotizar Consideraciones a tener en cuenta antes de empezar Damien SALLÉ damien.salle@tecnalia.com Today s reality: The automated production line
TECNALIA Robotics for Advanced Manufacturing ROBOTT-NET Robotizar Consideraciones a tener en cuenta antes de empezar Damien SALLÉ damien.salle@tecnalia.com Today s reality: The automated production line
Affordable Real-Time Vision Guidance for Robot Motion Control
 Affordable Real-Time Vision Guidance for Robot Motion Control Cong Wang Assistant Professor ECE and MIE Departments New Jersey Institute of Technology Mobile: (510)529-6691 Office: (973)596-5744 Advanced
Affordable Real-Time Vision Guidance for Robot Motion Control Cong Wang Assistant Professor ECE and MIE Departments New Jersey Institute of Technology Mobile: (510)529-6691 Office: (973)596-5744 Advanced
Accessible Power Tool Flexible Application Scalable Solution
 Accessible Power Tool Flexible Application Scalable Solution Franka Emika GmbH Our vision of a robot for everyone sensitive, interconnected, adaptive and cost-efficient. Even today, robotics remains a
Accessible Power Tool Flexible Application Scalable Solution Franka Emika GmbH Our vision of a robot for everyone sensitive, interconnected, adaptive and cost-efficient. Even today, robotics remains a
AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS. Nuno Sousa Eugénio Oliveira
 AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS Nuno Sousa Eugénio Oliveira Faculdade de Egenharia da Universidade do Porto, Portugal Abstract: This paper describes a platform that enables
AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS Nuno Sousa Eugénio Oliveira Faculdade de Egenharia da Universidade do Porto, Portugal Abstract: This paper describes a platform that enables
Academia Box. 6-axis robot training cell Robotics Academy
 Academia Box 6-axis robot training cell Robotics Academy The perfect introduction to the fascinating world of robotics The automation boom has continued unabated for many years now, and robots are becoming
Academia Box 6-axis robot training cell Robotics Academy The perfect introduction to the fascinating world of robotics The automation boom has continued unabated for many years now, and robots are becoming
Prepared for the future
 Press Release INDEX turn-mill center Prepared for the future With the turn-mill center introduced during its in-house exhibition in June 2014, INDEX continues the tradition of the successful compact G-series
Press Release INDEX turn-mill center Prepared for the future With the turn-mill center introduced during its in-house exhibition in June 2014, INDEX continues the tradition of the successful compact G-series
Advances in Robotics & Automation
 Advances in Robotics & Automation Advances in Robotics & Automation Bolmsjo, Adv Robot Autom 2014, 3:1 DOI: Review Article Open Access Reconfigurable and Flexible Industrial Robot Systems Gunnar Bolmsjo
Advances in Robotics & Automation Advances in Robotics & Automation Bolmsjo, Adv Robot Autom 2014, 3:1 DOI: Review Article Open Access Reconfigurable and Flexible Industrial Robot Systems Gunnar Bolmsjo
Positioning Paper Demystifying Collaborative Industrial Robots
 Positioning Paper Demystifying Collaborative Industrial Robots published by International Federation of Robotics Frankfurt, Germany December 2018 A positioning paper by the International Federation of
Positioning Paper Demystifying Collaborative Industrial Robots published by International Federation of Robotics Frankfurt, Germany December 2018 A positioning paper by the International Federation of
Fernando Ribeiro, Gil Lopes, Davide Oliveira, Fátima Gonçalves, Júlio
 MINHO@home Rodrigues Fernando Ribeiro, Gil Lopes, Davide Oliveira, Fátima Gonçalves, Júlio Grupo de Automação e Robótica, Departamento de Electrónica Industrial, Universidade do Minho, Campus de Azurém,
MINHO@home Rodrigues Fernando Ribeiro, Gil Lopes, Davide Oliveira, Fátima Gonçalves, Júlio Grupo de Automação e Robótica, Departamento de Electrónica Industrial, Universidade do Minho, Campus de Azurém,
Building Spatial Experiences in the Automotive Industry
 Building Spatial Experiences in the Automotive Industry i-know Data-driven Business Conference Franz Weghofer franz.weghofer@magna.com Video Agenda Digital Factory - Data Backbone of all Virtual Representations
Building Spatial Experiences in the Automotive Industry i-know Data-driven Business Conference Franz Weghofer franz.weghofer@magna.com Video Agenda Digital Factory - Data Backbone of all Virtual Representations
Comau AURA - Advanced Use Robotic Arm AURA. Soft as a Human Touch
 AURA Soft as a Human Touch 2 The Culture of Automation Designing advanced automation solutions means thinking about the industry in a new way, developing new scenarios, designing innovative products and
AURA Soft as a Human Touch 2 The Culture of Automation Designing advanced automation solutions means thinking about the industry in a new way, developing new scenarios, designing innovative products and
Year 1805 Doll, made by Maillardet, that wrote in either French or English and could draw landscapes
 Unit 8 : ROBOTICS INTRODUCTION Robots are devices that are programmed to move parts, or to do work with a tool. Robotics is a multidisciplinary engineering field dedicated to the development of autonomous
Unit 8 : ROBOTICS INTRODUCTION Robots are devices that are programmed to move parts, or to do work with a tool. Robotics is a multidisciplinary engineering field dedicated to the development of autonomous
AURA Soft as a Human Touch
 The Culture of Automation AURA Soft as a Human Touch Designing advanced automation solutions means thinking about the industry in a new way, developing new scenarios, designing innovative products and
The Culture of Automation AURA Soft as a Human Touch Designing advanced automation solutions means thinking about the industry in a new way, developing new scenarios, designing innovative products and
Robotics Manipulation and control. University of Strasbourg Telecom Physique Strasbourg, ISAV option Master IRIV, AR track Jacques Gangloff
 Robotics Manipulation and control University of Strasbourg Telecom Physique Strasbourg, ISAV option Master IRIV, AR track Jacques Gangloff Outline of the lecture Introduction : Overview 1. Theoretical
Robotics Manipulation and control University of Strasbourg Telecom Physique Strasbourg, ISAV option Master IRIV, AR track Jacques Gangloff Outline of the lecture Introduction : Overview 1. Theoretical
Handling station. Ruggeveldlaan Deurne tel
 Handling station Introduction and didactic background In the age of knowledge, automation technology is gaining increasing importance as a key division of engineering sciences. As a technical/scientific
Handling station Introduction and didactic background In the age of knowledge, automation technology is gaining increasing importance as a key division of engineering sciences. As a technical/scientific
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
The project. General challenges and problems. Our subjects. The attachment and locomotion system
 The project The Ceilbot project is a study and research project organized at the Helsinki University of Technology. The aim of the project is to design and prototype a multifunctional robot which takes
The project The Ceilbot project is a study and research project organized at the Helsinki University of Technology. The aim of the project is to design and prototype a multifunctional robot which takes
P15051: Robotic Eye for Eye Tracker
 P15051: Robotic Eye for Eye Tracker Andrew Drogalis Mechanical Engineer Tim O Hearn Mechanical Engineer Katie Hardy Daniel Webster Jorge Gonzalez Abstract: A robotic eye was constructed for the purpose
P15051: Robotic Eye for Eye Tracker Andrew Drogalis Mechanical Engineer Tim O Hearn Mechanical Engineer Katie Hardy Daniel Webster Jorge Gonzalez Abstract: A robotic eye was constructed for the purpose
KUKA Welding Robot Making More Money for You
 KUKA Welding Robots Making More Money for you Page 1 of 15 KUKA Welding Robot Making More Money for You 1. Reduce the downtime due to collisions. It is not uncommon that many collisions happen between
KUKA Welding Robots Making More Money for you Page 1 of 15 KUKA Welding Robot Making More Money for You 1. Reduce the downtime due to collisions. It is not uncommon that many collisions happen between
Motion Control. Ready for the Extreme
 Motion Control Ready for the Extreme Elmo Motion Control - Inspiring Motion Since 1988 Elmo designs and manufactures cutting-edge servo drives and network motion controllers that are one-stop solutions
Motion Control Ready for the Extreme Elmo Motion Control - Inspiring Motion Since 1988 Elmo designs and manufactures cutting-edge servo drives and network motion controllers that are one-stop solutions
COVENANT UNIVERSITY NIGERIA TUTORIAL KIT OMEGA SEMESTER PROGRAMME: MECHANICAL ENGINEERING
 COVENANT UNIVERSITY NIGERIA TUTORIAL KIT OMEGA SEMESTER PROGRAMME: MECHANICAL ENGINEERING COURSE: MCE 527 DISCLAIMER The contents of this document are intended for practice and leaning purposes at the
COVENANT UNIVERSITY NIGERIA TUTORIAL KIT OMEGA SEMESTER PROGRAMME: MECHANICAL ENGINEERING COURSE: MCE 527 DISCLAIMER The contents of this document are intended for practice and leaning purposes at the
Robotics. In Textile Industry: Global Scenario
 Robotics In Textile Industry: A Global Scenario By: M.Parthiban & G.Mahaalingam Abstract Robotics In Textile Industry - A Global Scenario By: M.Parthiban & G.Mahaalingam, Faculty of Textiles,, SSM College
Robotics In Textile Industry: A Global Scenario By: M.Parthiban & G.Mahaalingam Abstract Robotics In Textile Industry - A Global Scenario By: M.Parthiban & G.Mahaalingam, Faculty of Textiles,, SSM College
SIMULATION OF VIRTUAL MACHINE TOOL DURING THE DEVELOPMENT PHASE SVOČ FST 2016
 SIMULATION OF VIRTUAL MACHINE TOOL DURING THE DEVELOPMENT PHASE SVOČ FST 2016 ABSTRACT Ing. Zdeněk Hájíček, West Bohemia University, Univerzitni 8, 306 14 Pilsen Czech Republic This paper deals with the
SIMULATION OF VIRTUAL MACHINE TOOL DURING THE DEVELOPMENT PHASE SVOČ FST 2016 ABSTRACT Ing. Zdeněk Hájíček, West Bohemia University, Univerzitni 8, 306 14 Pilsen Czech Republic This paper deals with the
CSE 165: 3D User Interaction. Lecture #14: 3D UI Design
 CSE 165: 3D User Interaction Lecture #14: 3D UI Design 2 Announcements Homework 3 due tomorrow 2pm Monday: midterm discussion Next Thursday: midterm exam 3D UI Design Strategies 3 4 Thus far 3DUI hardware
CSE 165: 3D User Interaction Lecture #14: 3D UI Design 2 Announcements Homework 3 due tomorrow 2pm Monday: midterm discussion Next Thursday: midterm exam 3D UI Design Strategies 3 4 Thus far 3DUI hardware
WORKSHOP. Industrieroboter als Bearbeitungsmaschinen
 WORKSHOP Industrieroboter als Bearbeitungsmaschinen 21 März 2014, Fraunhofer IPK, Berlin Fortgeschrittene Rgelungsverfahren für die Bearbeitung mit den Industrierobotern Dragoljub Surdilovic, Fraunhofer
WORKSHOP Industrieroboter als Bearbeitungsmaschinen 21 März 2014, Fraunhofer IPK, Berlin Fortgeschrittene Rgelungsverfahren für die Bearbeitung mit den Industrierobotern Dragoljub Surdilovic, Fraunhofer
Technifutur. Maarten Daemen Sales Engineer / KUKA Automatisering + Robots NV KUKA LBR iiwa M. Daemen
 Technifutur Maarten Daemen Sales Engineer / KUKA Automatisering + Robots NV 2016-11-28 page: 1 ii invite you page: 2 LBR iiwa LBR stands for Leichtbauroboter (German for lightweight robot), iiwa for intelligent
Technifutur Maarten Daemen Sales Engineer / KUKA Automatisering + Robots NV 2016-11-28 page: 1 ii invite you page: 2 LBR iiwa LBR stands for Leichtbauroboter (German for lightweight robot), iiwa for intelligent
New generation of welding and inspection systems
 New generation of welding and inspection systems Throughout the pipeline industry, and particularly in offshore and spool base production, welding requirements are shifting toward higher quality, greater
New generation of welding and inspection systems Throughout the pipeline industry, and particularly in offshore and spool base production, welding requirements are shifting toward higher quality, greater
Development of Running Robot Based on Charge Coupled Device
 Development of Running Robot Based on Charge Coupled Device Hongzhang He School of Mechanics, North China Electric Power University, Baoding071003, China. hhzh_ncepu@163.com Abstract Robot technology is
Development of Running Robot Based on Charge Coupled Device Hongzhang He School of Mechanics, North China Electric Power University, Baoding071003, China. hhzh_ncepu@163.com Abstract Robot technology is
Visitors can also browse ZDT data for any robot running at IMTS, added Geheb.
 FANUC America Features an Interactive Software Kiosk Demonstrating the New Zero Downtime (ZTD), Remote Connectivity, and ROBOGUIDE at IMTS 2014 For Immediate Release ROCHESTER HILLS, Mich., Sept. 8, 2014
FANUC America Features an Interactive Software Kiosk Demonstrating the New Zero Downtime (ZTD), Remote Connectivity, and ROBOGUIDE at IMTS 2014 For Immediate Release ROCHESTER HILLS, Mich., Sept. 8, 2014
FP7 ICT Call 6: Cognitive Systems and Robotics
 FP7 ICT Call 6: Cognitive Systems and Robotics Information day Luxembourg, January 14, 2010 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media
FP7 ICT Call 6: Cognitive Systems and Robotics Information day Luxembourg, January 14, 2010 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media
IO-Link an integral part in the next industrial revolution known as Industry 4.0
 IO-Link an integral part in the next industrial revolution known as Industry 4.0 IO-Link an integral part in the next industrial revolution known as Industry 4.0 The manufacturing industry is on the verge
IO-Link an integral part in the next industrial revolution known as Industry 4.0 IO-Link an integral part in the next industrial revolution known as Industry 4.0 The manufacturing industry is on the verge