Advanced robotics for Industry 4.0. Michael Valášek, Martin Nečas CTU in Prague, Faculty of Mechanical Engineering
|
|
|
- Meagan Norton
- 5 years ago
- Views:
Transcription
1 Advanced robotics for Industry 4.0 Michael Valášek, Martin Nečas CTU in Prague, Faculty of Mechanical Engineering
2 Scope of presentation Directions of current research Examples of advanced robotics Conclusion
3 Function of robotics Robotics is the main tool for automation of remaining human work Positive? Negative? But it is
4 Directions of advanced robotics for Industry 4.0 Direct multiple robot cooperation for improved robot properties Direct robot cooperation with human workers Reconfigurable robotics for unforseeable operations Grasping and manipulation by sensor rich robotic structures
5 Example 1: Machining by robots Robots have full range of spatial motion Robots are cheaper than machine tools BUT Robots have low stiffness, lower than machine tools, leading into inacceptable inaccuracies SOLUTION Cooperating robots + additional measurement PRIMARY GOAL Increase of robot stiffness into the value > 10 N/um
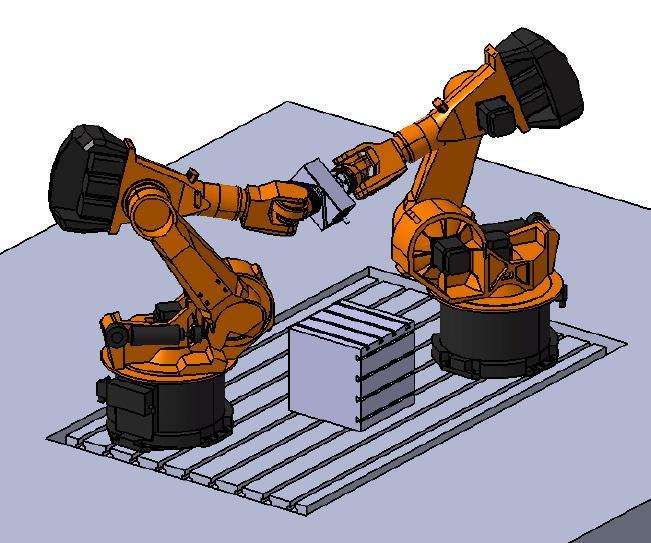
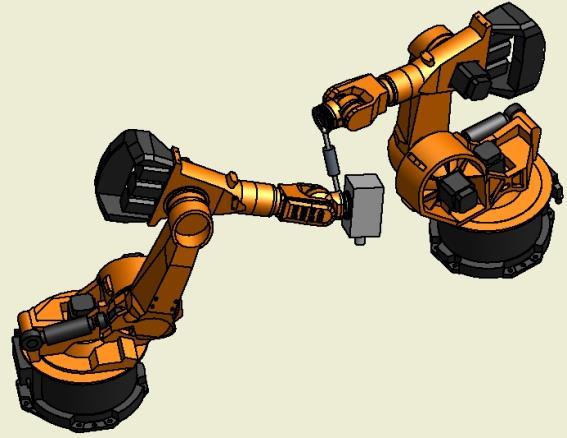
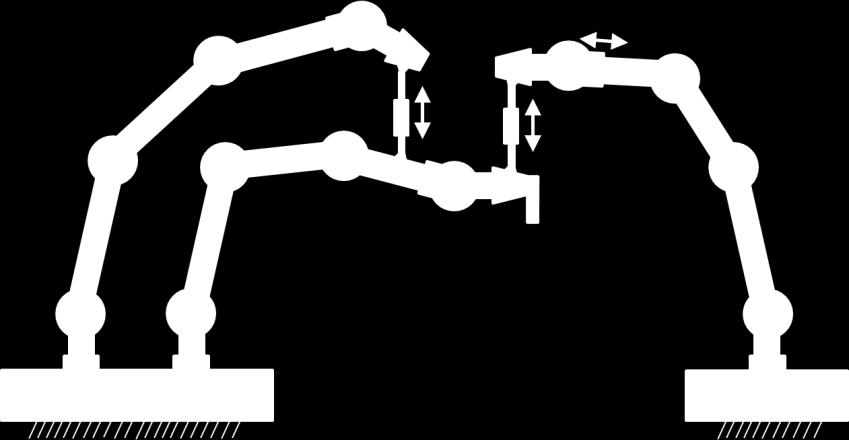


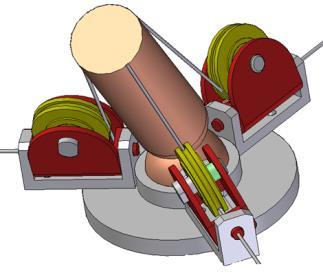
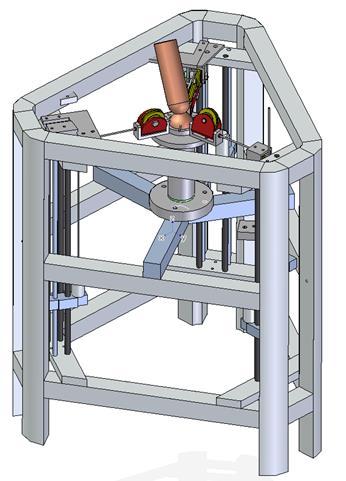
6 Direct Cooperating robots for machining RoboMill project Patent pending
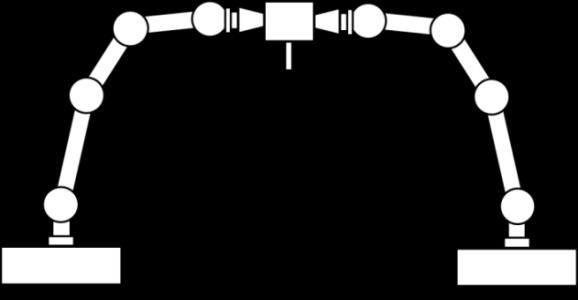
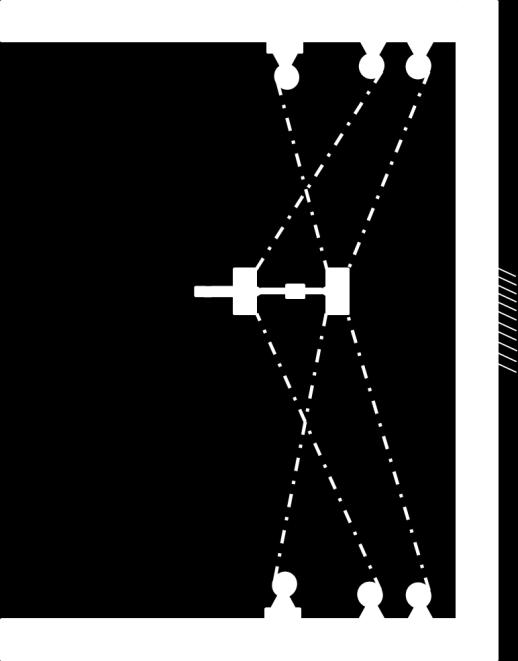
7 Solution principle Single robot has stiffness 0,5 N/um Interconnected robots = cooperating robots have mechanically stiffness 3,5x0,5 = 1,75 N/um Additional measurement enables feedback control that increases the stiffness >7x The resulting stiffness of cooperating robots is >24x higher than of a single robot The resulting stiffness of cooperating robots is >24x0,5 = 12 N/um

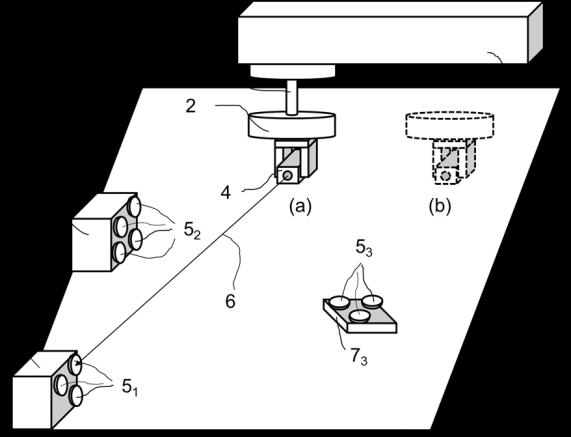
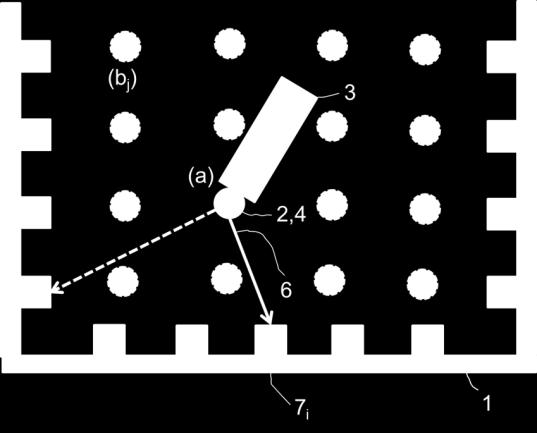
8 Additional measurement Machining spindle Optical laser measurement in each robot joint Robot interconnection
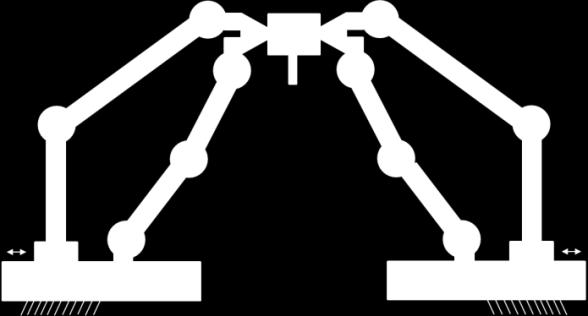
9 Future improvement of cooperating robots The concept of cooperating robots enables another better improvement of stiffness Interconnected robots cooperating robots collateral robots mechatronic stiffness increase of stiffness >10x Mechanical stiffness of interconnected robots is 1,75 N/um + mechatronic stiffness -> resulting stiffness >17 N/um Also possible further concepts
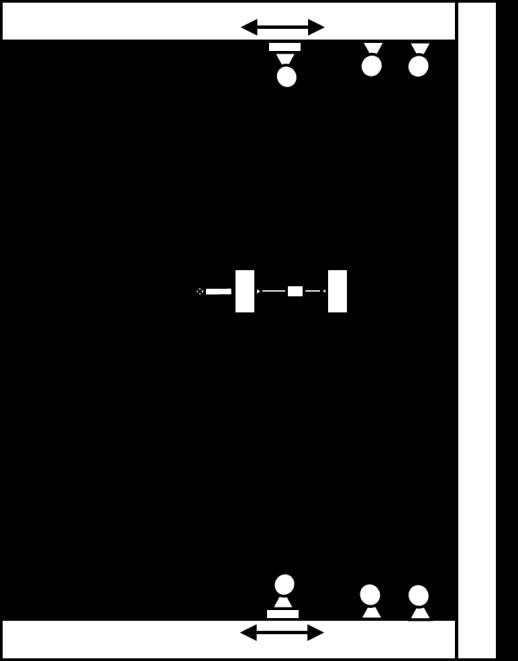
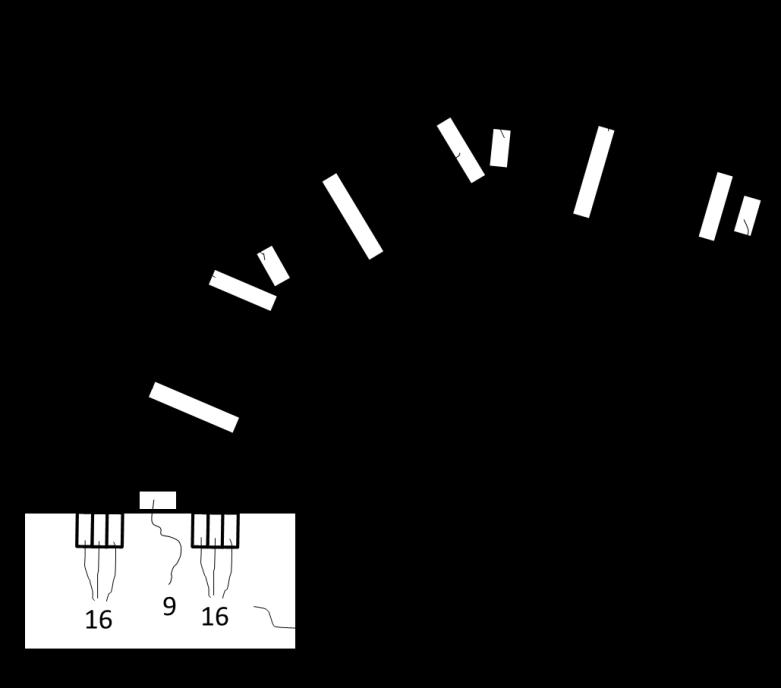
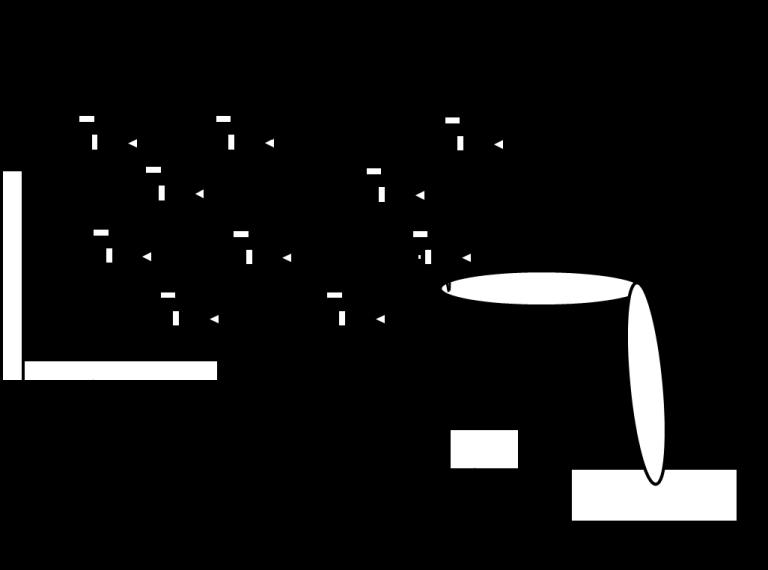
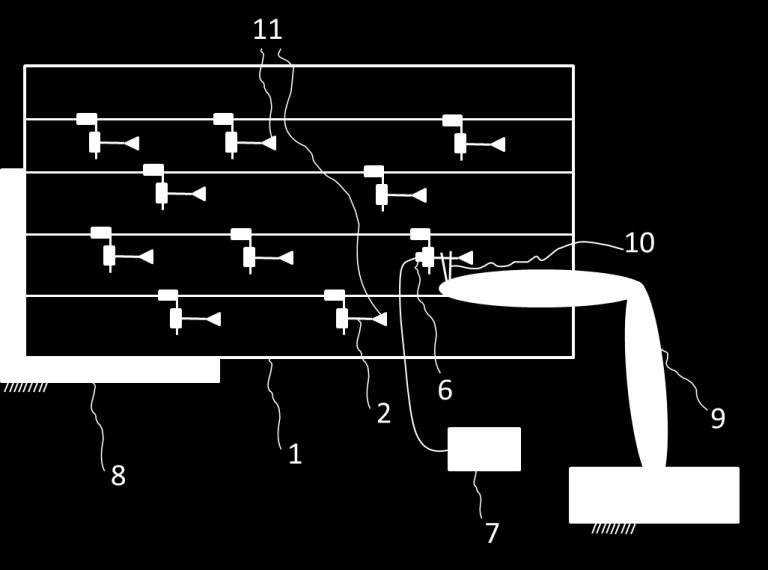
10 Example 2: Direct Multiple Robot Cooperation Mobile robots self-locking to ground, connecting for increased stiffness, self-referencing



11 Redundant robot calibration Patents pending

12 Study of self-constructing robots Can the robots be self-carrying?
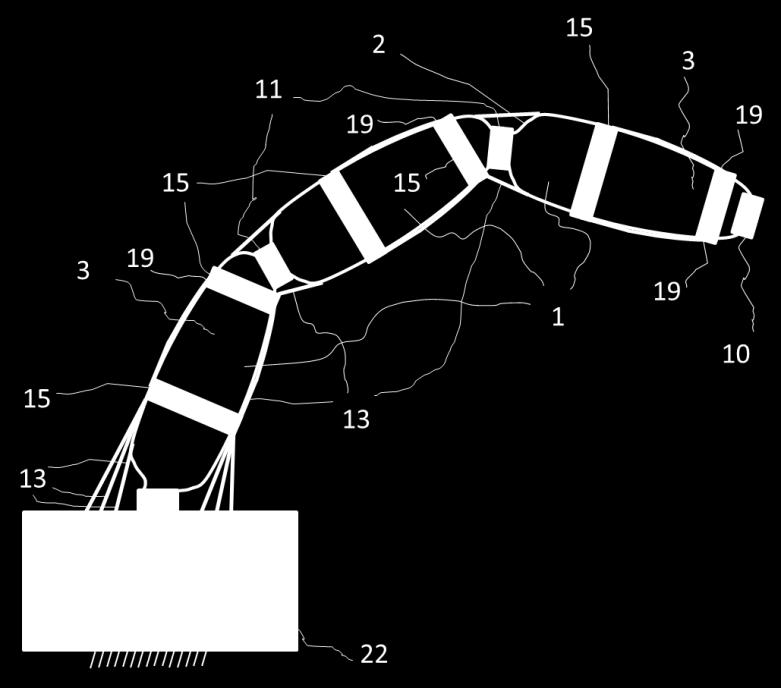
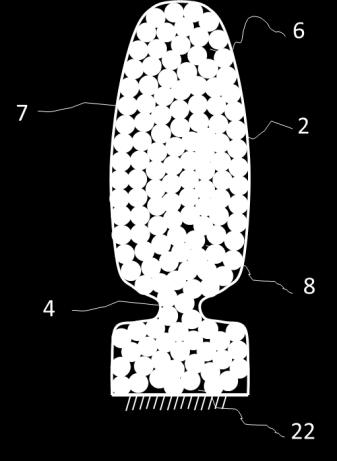
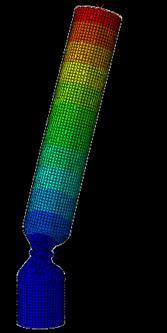
13 Example 3: Robot safely cooperating with worker Safe cooperation by different means Electronic (camera) recognition Limited power - force capability Limited power balancing Lightweight robot structures (cable driven, inflatable) inherently safer due to lower inertias


14 Crane manipulator (robot) for cooperation with human workers Nonlinear control for large displacements


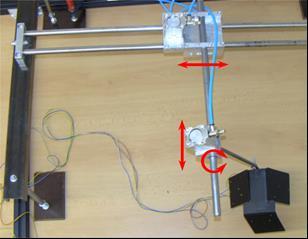
15 Cable driven robots Patent pending



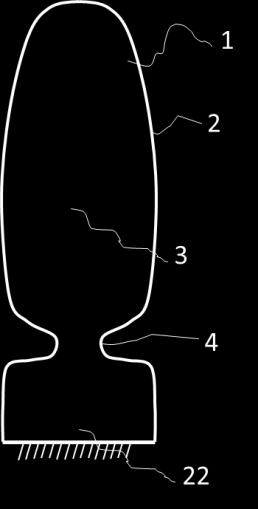


16 Inflated/deflated robots Patent pending
17 Example 4: Reconfigurable robotics for unforeseeable operations Manufacturing operations can occur in nondeterministic (unforeseen) sequence This is consequence of customized products Robotic fleet should be accordingly reconfigured just in-time


18 Automatic tooling boom Patent pending
19 Example 5: Grasping and manipulation by sensor rich robotic structures Specialized robot gripper can be replaced by universal grippers with multiple sensors
20 Example 6: Intranet of machines in production line Capacity and stability of communication within intranet of machines on production line (e.g. EtherCAT) Limits of communication in control network
21 Conclusions Robotics is not just a software Flexible manufacturing = Advanced robotics Advanced robotics = advanced concepts of material object s motion and manipulation Industry 4.0 = advanced mechatronics of systems Let us open our phantasy and creativity
22 Thank you for your kind attention Contacts:
THE INNOVATION COMPANY ROBOTICS. Institute for Robotics and Mechatronics
 THE INNOVATION COMPANY ROBOTICS Institute for Robotics and Mechatronics The fields in which we research and their associated infrastructure enable us to carry out pioneering research work and provide solutions
THE INNOVATION COMPANY ROBOTICS Institute for Robotics and Mechatronics The fields in which we research and their associated infrastructure enable us to carry out pioneering research work and provide solutions
Robotic Capture and De-Orbit of a Tumbling and Heavy Target from Low Earth Orbit
 www.dlr.de Chart 1 Robotic Capture and De-Orbit of a Tumbling and Heavy Target from Low Earth Orbit Steffen Jaekel, R. Lampariello, G. Panin, M. Sagardia, B. Brunner, O. Porges, and E. Kraemer (1) M. Wieser,
www.dlr.de Chart 1 Robotic Capture and De-Orbit of a Tumbling and Heavy Target from Low Earth Orbit Steffen Jaekel, R. Lampariello, G. Panin, M. Sagardia, B. Brunner, O. Porges, and E. Kraemer (1) M. Wieser,
CAPACITIES FOR TECHNOLOGY TRANSFER
 CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
VALERI - A COLLABORATIVE MOBILE MANIPULATOR FOR AEROSPACE PRODUCTION. CLAWAR 2016, London, UK Fraunhofer IFF Robotersysteme
 VALERI - A COLLABORATIVE MOBILE MANIPULATOR FOR AEROSPACE PRODUCTION CLAWAR 2016, London, UK Fraunhofer IFF Robotersysteme Fraunhofer IFF, Magdeburg 2016 VALERI - A collaborative mobile manipulator for
VALERI - A COLLABORATIVE MOBILE MANIPULATOR FOR AEROSPACE PRODUCTION CLAWAR 2016, London, UK Fraunhofer IFF Robotersysteme Fraunhofer IFF, Magdeburg 2016 VALERI - A collaborative mobile manipulator for
User-Friendly Task Creation Using a CAD Integrated Robotic System on a Real Workcell
 User-Friendly Task Creation Using a CAD Integrated Robotic System on a Real Workcell Alireza Changizi, Arash Rezaei, Jamal Muhammad, Jyrki Latokartano, Minna Lanz International Science Index, Industrial
User-Friendly Task Creation Using a CAD Integrated Robotic System on a Real Workcell Alireza Changizi, Arash Rezaei, Jamal Muhammad, Jyrki Latokartano, Minna Lanz International Science Index, Industrial
Integrated Technology Concept for Robotic On-Orbit Servicing Systems
 Integrated Technology Concept for Robotic On-Orbit Servicing Systems Bernd Maediger, Airbus DS GmbH Bremen, Germany Visual-based navigation Manipulation Grasping Non-cooperative target GNC Visual-based
Integrated Technology Concept for Robotic On-Orbit Servicing Systems Bernd Maediger, Airbus DS GmbH Bremen, Germany Visual-based navigation Manipulation Grasping Non-cooperative target GNC Visual-based
 UNIT-1 INTRODUCATION The field of robotics has its origins in science fiction. The term robot was derived from the English translation of a fantasy play written in Czechoslovakia around 1920. It took another
UNIT-1 INTRODUCATION The field of robotics has its origins in science fiction. The term robot was derived from the English translation of a fantasy play written in Czechoslovakia around 1920. It took another
Cognitive robots and emotional intelligence Cloud robotics Ethical, legal and social issues of robotic Construction robots Human activities in many
 Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
2014 Market Trends Webinar Series
 Robotic Industries Association 2014 Market Trends Webinar Series Watch live or archived at no cost Learn about the latest innovations in robotics Sponsored by leading robotics companies 1 2014 Calendar
Robotic Industries Association 2014 Market Trends Webinar Series Watch live or archived at no cost Learn about the latest innovations in robotics Sponsored by leading robotics companies 1 2014 Calendar
Tool Chains for Simulation and Experimental Validation of Orbital Robotic Technologies
 DLR.de Chart 1 > The Next Generation of Space Robotic Servicing Technologies > Ch. Borst Exploration of Orbital Robotic Technologies > 26.05.2015 Tool Chains for Simulation and Experimental Validation
DLR.de Chart 1 > The Next Generation of Space Robotic Servicing Technologies > Ch. Borst Exploration of Orbital Robotic Technologies > 26.05.2015 Tool Chains for Simulation and Experimental Validation
How To Create The Right Collaborative System For Your Application. Corey Ryan Manager - Medical Robotics KUKA Robotics Corporation
 How To Create The Right Collaborative System For Your Application Corey Ryan Manager - Medical Robotics KUKA Robotics Corporation C Definitions Cobot: for this presentation a robot specifically designed
How To Create The Right Collaborative System For Your Application Corey Ryan Manager - Medical Robotics KUKA Robotics Corporation C Definitions Cobot: for this presentation a robot specifically designed
Distributed Control of Multi-Robot Teams: Cooperative Baton Passing Task
 Appeared in Proceedings of the 4 th International Conference on Information Systems Analysis and Synthesis (ISAS 98), vol. 3, pages 89-94. Distributed Control of Multi- Teams: Cooperative Baton Passing
Appeared in Proceedings of the 4 th International Conference on Information Systems Analysis and Synthesis (ISAS 98), vol. 3, pages 89-94. Distributed Control of Multi- Teams: Cooperative Baton Passing
ISO INTERNATIONAL STANDARD. Robots for industrial environments Safety requirements Part 1: Robot
 INTERNATIONAL STANDARD ISO 10218-1 First edition 2006-06-01 Robots for industrial environments Safety requirements Part 1: Robot Robots pour environnements industriels Exigences de sécurité Partie 1: Robot
INTERNATIONAL STANDARD ISO 10218-1 First edition 2006-06-01 Robots for industrial environments Safety requirements Part 1: Robot Robots pour environnements industriels Exigences de sécurité Partie 1: Robot
Intelligent interaction
 BionicWorkplace: autonomously learning workstation for human-machine collaboration Intelligent interaction Face to face, hand in hand. The BionicWorkplace shows the extent to which human-machine collaboration
BionicWorkplace: autonomously learning workstation for human-machine collaboration Intelligent interaction Face to face, hand in hand. The BionicWorkplace shows the extent to which human-machine collaboration
Positioning Paper Demystifying Collaborative Industrial Robots
 Positioning Paper Demystifying Collaborative Industrial Robots published by International Federation of Robotics Frankfurt, Germany December 2018 A positioning paper by the International Federation of
Positioning Paper Demystifying Collaborative Industrial Robots published by International Federation of Robotics Frankfurt, Germany December 2018 A positioning paper by the International Federation of
USING VIRTUAL REALITY SIMULATION FOR SAFE HUMAN-ROBOT INTERACTION 1. INTRODUCTION
 USING VIRTUAL REALITY SIMULATION FOR SAFE HUMAN-ROBOT INTERACTION Brad Armstrong 1, Dana Gronau 2, Pavel Ikonomov 3, Alamgir Choudhury 4, Betsy Aller 5 1 Western Michigan University, Kalamazoo, Michigan;
USING VIRTUAL REALITY SIMULATION FOR SAFE HUMAN-ROBOT INTERACTION Brad Armstrong 1, Dana Gronau 2, Pavel Ikonomov 3, Alamgir Choudhury 4, Betsy Aller 5 1 Western Michigan University, Kalamazoo, Michigan;
Wednesday, October 29, :00-04:00pm EB: 3546D. TELEOPERATION OF MOBILE MANIPULATORS By Yunyi Jia Advisor: Prof.
 Wednesday, October 29, 2014 02:00-04:00pm EB: 3546D TELEOPERATION OF MOBILE MANIPULATORS By Yunyi Jia Advisor: Prof. Ning Xi ABSTRACT Mobile manipulators provide larger working spaces and more flexibility
Wednesday, October 29, 2014 02:00-04:00pm EB: 3546D TELEOPERATION OF MOBILE MANIPULATORS By Yunyi Jia Advisor: Prof. Ning Xi ABSTRACT Mobile manipulators provide larger working spaces and more flexibility
Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular fatigue
Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular fatigue
Sensing self motion. Key points: Why robots need self-sensing Sensors for proprioception in biological systems in robot systems
 Sensing self motion Key points: Why robots need self-sensing Sensors for proprioception in biological systems in robot systems Position sensing Velocity and acceleration sensing Force sensing Vision based
Sensing self motion Key points: Why robots need self-sensing Sensors for proprioception in biological systems in robot systems Position sensing Velocity and acceleration sensing Force sensing Vision based
Method of Accurate Countersinking and Rivet Shaving
 2001-01-2569 Method of Accurate Countersinking and Rivet Shaving Copyright 2001 Society of Automotive Engineers, Inc. Todd Rudberg and Scott Smith Electroimpact, Inc. Andy Smith Airbus UK, Ltd. ABSTRACT
2001-01-2569 Method of Accurate Countersinking and Rivet Shaving Copyright 2001 Society of Automotive Engineers, Inc. Todd Rudberg and Scott Smith Electroimpact, Inc. Andy Smith Airbus UK, Ltd. ABSTRACT
Virtual Grasping Using a Data Glove
 Virtual Grasping Using a Data Glove By: Rachel Smith Supervised By: Dr. Kay Robbins 3/25/2005 University of Texas at San Antonio Motivation Navigation in 3D worlds is awkward using traditional mouse Direct
Virtual Grasping Using a Data Glove By: Rachel Smith Supervised By: Dr. Kay Robbins 3/25/2005 University of Texas at San Antonio Motivation Navigation in 3D worlds is awkward using traditional mouse Direct
Peter Berkelman. ACHI/DigitalWorld
 Magnetic Levitation Haptic Peter Berkelman ACHI/DigitalWorld February 25, 2013 Outline: Haptics - Force Feedback Sample devices: Phantoms, Novint Falcon, Force Dimension Inertia, friction, hysteresis/backlash
Magnetic Levitation Haptic Peter Berkelman ACHI/DigitalWorld February 25, 2013 Outline: Haptics - Force Feedback Sample devices: Phantoms, Novint Falcon, Force Dimension Inertia, friction, hysteresis/backlash
Mechatronics. Bring the challenge. We ll build the solution.
 Mechatronics Bring the challenge. We ll build the solution. VALUE-ADDED ENCODER ASSEMBLIES CUSTOMIZED ROTARY STAGES LINEAR AND CURVED STAGES VOICE COIL STAGES ROBOTIC JOINTS CUSTOMIZED ELECTRONICS, CABLING
Mechatronics Bring the challenge. We ll build the solution. VALUE-ADDED ENCODER ASSEMBLIES CUSTOMIZED ROTARY STAGES LINEAR AND CURVED STAGES VOICE COIL STAGES ROBOTIC JOINTS CUSTOMIZED ELECTRONICS, CABLING
Robotic System Simulation and Modeling Stefan Jörg Robotic and Mechatronic Center
 Robotic System Simulation and ing Stefan Jörg Robotic and Mechatronic Center Outline Introduction The SAFROS Robotic System Simulator Robotic System ing Conclusions Folie 2 DLR s Mirosurge: A versatile
Robotic System Simulation and ing Stefan Jörg Robotic and Mechatronic Center Outline Introduction The SAFROS Robotic System Simulator Robotic System ing Conclusions Folie 2 DLR s Mirosurge: A versatile
Study on the Development of High Transfer Robot Additional-Axis for Hot Stamping Press Process
 Study on the Development of High Transfer Robot Additional-Axis for Hot Stamping Press Process Kee-Jin Park1, Seok-Hong Oh2, Eun-Sil Jang1, Byeong-Soo Kim1, and Jin-Dae Kim1 1 Daegu Mechatronics & Materials
Study on the Development of High Transfer Robot Additional-Axis for Hot Stamping Press Process Kee-Jin Park1, Seok-Hong Oh2, Eun-Sil Jang1, Byeong-Soo Kim1, and Jin-Dae Kim1 1 Daegu Mechatronics & Materials
Multisensory Based Manipulation Architecture
 Marine Robot and Dexterous Manipulatin for Enabling Multipurpose Intevention Missions WP7 Multisensory Based Manipulation Architecture GIRONA 2012 Y2 Review Meeting Pedro J Sanz IRS Lab http://www.irs.uji.es/
Marine Robot and Dexterous Manipulatin for Enabling Multipurpose Intevention Missions WP7 Multisensory Based Manipulation Architecture GIRONA 2012 Y2 Review Meeting Pedro J Sanz IRS Lab http://www.irs.uji.es/
INDUSTRIAL ROBOTS PROGRAMMING: BUILDING APPLICATIONS FOR THE FACTORIES OF THE FUTURE
 INDUSTRIAL ROBOTS PROGRAMMING: BUILDING APPLICATIONS FOR THE FACTORIES OF THE FUTURE INDUSTRIAL ROBOTS PROGRAMMING: BUILDING APPLICATIONS FOR THE FACTORIES OF THE FUTURE J. Norberto Pires Mechanical Engineering
INDUSTRIAL ROBOTS PROGRAMMING: BUILDING APPLICATIONS FOR THE FACTORIES OF THE FUTURE INDUSTRIAL ROBOTS PROGRAMMING: BUILDING APPLICATIONS FOR THE FACTORIES OF THE FUTURE J. Norberto Pires Mechanical Engineering
Congress Best Paper Award
 Congress Best Paper Award Preprints of the 3rd IFAC Conference on Mechatronic Systems - Mechatronics 2004, 6-8 September 2004, Sydney, Australia, pp.547-552. OPTO-MECHATRONIC IMAE STABILIZATION FOR A COMPACT
Congress Best Paper Award Preprints of the 3rd IFAC Conference on Mechatronic Systems - Mechatronics 2004, 6-8 September 2004, Sydney, Australia, pp.547-552. OPTO-MECHATRONIC IMAE STABILIZATION FOR A COMPACT
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Summary of robot visual servo system
 Abstract Summary of robot visual servo system Xu Liu, Lingwen Tang School of Mechanical engineering, Southwest Petroleum University, Chengdu 610000, China In this paper, the survey of robot visual servoing
Abstract Summary of robot visual servo system Xu Liu, Lingwen Tang School of Mechanical engineering, Southwest Petroleum University, Chengdu 610000, China In this paper, the survey of robot visual servoing
Adaptive Humanoid Robot Arm Motion Generation by Evolved Neural Controllers
 Proceedings of the 3 rd International Conference on Mechanical Engineering and Mechatronics Prague, Czech Republic, August 14-15, 2014 Paper No. 170 Adaptive Humanoid Robot Arm Motion Generation by Evolved
Proceedings of the 3 rd International Conference on Mechanical Engineering and Mechatronics Prague, Czech Republic, August 14-15, 2014 Paper No. 170 Adaptive Humanoid Robot Arm Motion Generation by Evolved
Visual Servoing. Charlie Kemp. 4632B/8803 Mobile Manipulation Lecture 8
 Visual Servoing Charlie Kemp 4632B/8803 Mobile Manipulation Lecture 8 From: http://www.hsi.gatech.edu/visitors/maps/ 4 th floor 4100Q M Building 167 First office on HSI side From: http://www.hsi.gatech.edu/visitors/maps/
Visual Servoing Charlie Kemp 4632B/8803 Mobile Manipulation Lecture 8 From: http://www.hsi.gatech.edu/visitors/maps/ 4 th floor 4100Q M Building 167 First office on HSI side From: http://www.hsi.gatech.edu/visitors/maps/
Department of Robotics Ritsumeikan University
 Department of Robotics Ritsumeikan University Shinichi Hirai Dept. Robotics Ritsumeikan Univ. Hanoi Institute of Technology Hanoi, Vietnam, Dec. 20, 2008 http://www.ritsumei.ac.jp/se/rm/robo/index-e.htm
Department of Robotics Ritsumeikan University Shinichi Hirai Dept. Robotics Ritsumeikan Univ. Hanoi Institute of Technology Hanoi, Vietnam, Dec. 20, 2008 http://www.ritsumei.ac.jp/se/rm/robo/index-e.htm
Fast Tip/Tilt Platform
 Fast Tip/Tilt Platform Short Settling Time and High Dynamic Linearity S-331 Tip/tilt angle up to 5 mrad, optical deflection angle up to 10 mrad (0.57 ) Parallel-kinematic design for identically high performance
Fast Tip/Tilt Platform Short Settling Time and High Dynamic Linearity S-331 Tip/tilt angle up to 5 mrad, optical deflection angle up to 10 mrad (0.57 ) Parallel-kinematic design for identically high performance
PR2 HEAD AND HAND MANIPULATION THROUGH TELE-OPERATION
 PR2 HEAD AND HAND MANIPULATION THROUGH TELE-OPERATION Using an Attitude and Heading Reference System Jason Allen, SUNFEST (EE), University of the District of Columbia Advisor: Dr. Camillo J. Taylor A Brief
PR2 HEAD AND HAND MANIPULATION THROUGH TELE-OPERATION Using an Attitude and Heading Reference System Jason Allen, SUNFEST (EE), University of the District of Columbia Advisor: Dr. Camillo J. Taylor A Brief
Available theses in robotics (November 2017) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in robotics (November 2017) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular
Available theses in robotics (November 2017) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular
FP7 ICT Call 6: Cognitive Systems and Robotics
 FP7 ICT Call 6: Cognitive Systems and Robotics Information day Luxembourg, January 14, 2010 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media
FP7 ICT Call 6: Cognitive Systems and Robotics Information day Luxembourg, January 14, 2010 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media
Servo Robot Training Systems
 Servo Robot Training Systems LabVolt Series Datasheet Festo Didactic en 220 V - 50 Hz 07/2018 Table of Contents General Description 2 Robot Controller Module 3 Servo Robot Software 3 Location Pins 4 Included
Servo Robot Training Systems LabVolt Series Datasheet Festo Didactic en 220 V - 50 Hz 07/2018 Table of Contents General Description 2 Robot Controller Module 3 Servo Robot Software 3 Location Pins 4 Included
KINECT CONTROLLED HUMANOID AND HELICOPTER
 KINECT CONTROLLED HUMANOID AND HELICOPTER Muffakham Jah College of Engineering & Technology Presented by : MOHAMMED KHAJA ILIAS PASHA ZESHAN ABDUL MAJEED AZMI SYED ABRAR MOHAMMED ISHRAQ SARID MOHAMMED
KINECT CONTROLLED HUMANOID AND HELICOPTER Muffakham Jah College of Engineering & Technology Presented by : MOHAMMED KHAJA ILIAS PASHA ZESHAN ABDUL MAJEED AZMI SYED ABRAR MOHAMMED ISHRAQ SARID MOHAMMED
Human-like Assembly Robots in Factories
 5-88 June Symposium on Japan America Frontier of Engineering (JAFOE) Robotics Session: Human-like Assembly Robots in Factories 8th June Robotics Technology R&D Group Shingo Ando 0520 Introduction: Overview
5-88 June Symposium on Japan America Frontier of Engineering (JAFOE) Robotics Session: Human-like Assembly Robots in Factories 8th June Robotics Technology R&D Group Shingo Ando 0520 Introduction: Overview
CENTER OF MODERN CONTROL TECHNIQUES A INDUSTRIAL INFORMATICS
 CENTER OF MODERN CONTROL TECHNIQUES A INDUSTRIAL INFORMATICS WORKING WIITHIN DEPARTMENT OF CYBERNETICS AND ARTIFICAL INTELLIGENCE, TU KOŠICE doc. Ing. Ján Jadlovský, CSc. Head of the CMCT & II Technical
CENTER OF MODERN CONTROL TECHNIQUES A INDUSTRIAL INFORMATICS WORKING WIITHIN DEPARTMENT OF CYBERNETICS AND ARTIFICAL INTELLIGENCE, TU KOŠICE doc. Ing. Ján Jadlovský, CSc. Head of the CMCT & II Technical
Perception. Read: AIMA Chapter 24 & Chapter HW#8 due today. Vision
 11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
Building Perceptive Robots with INTEL Euclid Development kit
 Building Perceptive Robots with INTEL Euclid Development kit Amit Moran Perceptual Computing Systems Innovation 2 2 3 A modern robot should Perform a task Find its way in our world and move safely Understand
Building Perceptive Robots with INTEL Euclid Development kit Amit Moran Perceptual Computing Systems Innovation 2 2 3 A modern robot should Perform a task Find its way in our world and move safely Understand
Easy Robot Programming for Industrial Manipulators by Manual Volume Sweeping
 Easy Robot Programming for Industrial Manipulators by Manual Volume Sweeping *Yusuke MAEDA, Tatsuya USHIODA and Satoshi MAKITA (Yokohama National University) MAEDA Lab INTELLIGENT & INDUSTRIAL ROBOTICS
Easy Robot Programming for Industrial Manipulators by Manual Volume Sweeping *Yusuke MAEDA, Tatsuya USHIODA and Satoshi MAKITA (Yokohama National University) MAEDA Lab INTELLIGENT & INDUSTRIAL ROBOTICS
Ricoh's Machine Vision: A Window on the Future
 White Paper Ricoh's Machine Vision: A Window on the Future As the range of machine vision applications continues to expand, Ricoh is providing new value propositions that integrate the optics, electronic
White Paper Ricoh's Machine Vision: A Window on the Future As the range of machine vision applications continues to expand, Ricoh is providing new value propositions that integrate the optics, electronic
Elements of Haptic Interfaces
 Elements of Haptic Interfaces Katherine J. Kuchenbecker Department of Mechanical Engineering and Applied Mechanics University of Pennsylvania kuchenbe@seas.upenn.edu Course Notes for MEAM 625, University
Elements of Haptic Interfaces Katherine J. Kuchenbecker Department of Mechanical Engineering and Applied Mechanics University of Pennsylvania kuchenbe@seas.upenn.edu Course Notes for MEAM 625, University
5250 Servo Robot Training Systems
 5250 Servo Robot Training Systems LabVolt Series Datasheet Festo Didactic en 120 V - 60 Hz 02/2018 Table of Contents General Description 2 Robot Controller Module 3 Servo Robot Software 3 Location Pins
5250 Servo Robot Training Systems LabVolt Series Datasheet Festo Didactic en 120 V - 60 Hz 02/2018 Table of Contents General Description 2 Robot Controller Module 3 Servo Robot Software 3 Location Pins
APAS assistant. Product scope
 APAS assistant Product scope APAS assistant Table of contents Non-contact human-robot collaboration for the Smart Factory Robots have improved the working world in the past years in many ways. Above and
APAS assistant Product scope APAS assistant Table of contents Non-contact human-robot collaboration for the Smart Factory Robots have improved the working world in the past years in many ways. Above and
ROBO-PARTNER: Safe human-robot collaboration for assembly: case studies and challenges
 ROBO-PARTNER: Safe human-robot collaboration for assembly: case studies and challenges Dr. George Michalos University of Patras ROBOT FORUM ASSEMBLY 16 March 2016 Parma, Italy Introduction Human sensitivity
ROBO-PARTNER: Safe human-robot collaboration for assembly: case studies and challenges Dr. George Michalos University of Patras ROBOT FORUM ASSEMBLY 16 March 2016 Parma, Italy Introduction Human sensitivity
1 Chapter 7: Steady-State Errors. Chapter 7. Steady-State Errors. 2000, John Wiley & Sons, Inc. Nise/Control Systems Engineering, 3/e
 1 Chapter 7 Steady-State Errors 2 Table 7.1 Test waveforms for evaluating steadystate errors of position control systems 3 Figure 7.1 Test inputs for steady-state error analysis and design vary with target
1 Chapter 7 Steady-State Errors 2 Table 7.1 Test waveforms for evaluating steadystate errors of position control systems 3 Figure 7.1 Test inputs for steady-state error analysis and design vary with target
CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM
 CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM Aniket D. Kulkarni *1, Dr.Sayyad Ajij D. *2 *1(Student of E&C Department, MIT Aurangabad, India) *2(HOD of E&C department, MIT Aurangabad, India) aniket2212@gmail.com*1,
CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM Aniket D. Kulkarni *1, Dr.Sayyad Ajij D. *2 *1(Student of E&C Department, MIT Aurangabad, India) *2(HOD of E&C department, MIT Aurangabad, India) aniket2212@gmail.com*1,
The below identified patent application is available for licensing. Requests for information should be addressed to:
 DEPARTMENT OF THE NAVY OFFICE OF COUNSEL NAVAL UNDERSEA WARFARE CENTER DIVISION 1176 HOWELL STREET NEWPORT Rl 02841-1708 IN REPLY REFER TO Attorney Docket No. 300119 25 May 2017 The below identified patent
DEPARTMENT OF THE NAVY OFFICE OF COUNSEL NAVAL UNDERSEA WARFARE CENTER DIVISION 1176 HOWELL STREET NEWPORT Rl 02841-1708 IN REPLY REFER TO Attorney Docket No. 300119 25 May 2017 The below identified patent
IVR: Introduction to Control
 IVR: Introduction to Control OVERVIEW Control systems Transformations Simple control algorithms History of control Centrifugal governor M. Boulton and J. Watt (1788) J. C. Maxwell (1868) On Governors.
IVR: Introduction to Control OVERVIEW Control systems Transformations Simple control algorithms History of control Centrifugal governor M. Boulton and J. Watt (1788) J. C. Maxwell (1868) On Governors.
Michigan State University College of Engineering; Dept. of Electrical and Computer Eng. ECE 480 Capstone Design Course Project Charter
 Michigan State University College of Engineering; Dept. of Electrical and Computer Eng. ECE 480 Capstone Design Course Project Charter Sponsoring Company/ Organization: MSU/Fraunhofer Center for Coatings
Michigan State University College of Engineering; Dept. of Electrical and Computer Eng. ECE 480 Capstone Design Course Project Charter Sponsoring Company/ Organization: MSU/Fraunhofer Center for Coatings
MECHATRONICS SYSTEM DESIGN
 MECHATRONICS SYSTEM DESIGN (MtE-325) TODAYS LECTURE Control systems Open-Loop Control Systems Closed-Loop Control Systems Transfer Functions Analog and Digital Control Systems Controller Configurations
MECHATRONICS SYSTEM DESIGN (MtE-325) TODAYS LECTURE Control systems Open-Loop Control Systems Closed-Loop Control Systems Transfer Functions Analog and Digital Control Systems Controller Configurations
CS 599: Distributed Intelligence in Robotics
 CS 599: Distributed Intelligence in Robotics Winter 2016 www.cpp.edu/~ftang/courses/cs599-di/ Dr. Daisy Tang All lecture notes are adapted from Dr. Lynne Parker s lecture notes on Distributed Intelligence
CS 599: Distributed Intelligence in Robotics Winter 2016 www.cpp.edu/~ftang/courses/cs599-di/ Dr. Daisy Tang All lecture notes are adapted from Dr. Lynne Parker s lecture notes on Distributed Intelligence
Medical Robotics LBR Med
 Medical Robotics LBR Med EN KUKA, a proven robotics partner. Discerning users around the world value KUKA as a reliable partner. KUKA has branches in over 30 countries, and for over 40 years, we have been
Medical Robotics LBR Med EN KUKA, a proven robotics partner. Discerning users around the world value KUKA as a reliable partner. KUKA has branches in over 30 countries, and for over 40 years, we have been
Structure Design of a Feeding Assistant Robot
 Structure Design of a Feeding Assistant Robot Chenling Zheng a, Liangchao Hou b and Jianyong Li c Shandong University of Science and Technology, Qingdao 266590, China. a2425614112@qq.com, b 931936225@qq.com,
Structure Design of a Feeding Assistant Robot Chenling Zheng a, Liangchao Hou b and Jianyong Li c Shandong University of Science and Technology, Qingdao 266590, China. a2425614112@qq.com, b 931936225@qq.com,
Parallel Robot Projects at Ohio University
 Parallel Robot Projects at Ohio University Robert L. Williams II with graduate students: John Hall, Brian Hopkins, Atul Joshi, Josh Collins, Jigar Vadia, Dana Poling, and Ron Nyzen And Special Thanks to:
Parallel Robot Projects at Ohio University Robert L. Williams II with graduate students: John Hall, Brian Hopkins, Atul Joshi, Josh Collins, Jigar Vadia, Dana Poling, and Ron Nyzen And Special Thanks to:
Design and Operation of a Force-Reflecting Magnetic Levitation Coarse-Fine Teleoperation System
 IEEE International Conference on Robotics and Automation, (ICRA 4) New Orleans, USA, April 6 - May 1, 4, pp. 4147-41. Design and Operation of a Force-Reflecting Magnetic Levitation Coarse-Fine Teleoperation
IEEE International Conference on Robotics and Automation, (ICRA 4) New Orleans, USA, April 6 - May 1, 4, pp. 4147-41. Design and Operation of a Force-Reflecting Magnetic Levitation Coarse-Fine Teleoperation
League <BART LAB AssistBot (THAILAND)>
>") RoboCup@Home League 2013 Jackrit Suthakorn, Ph.D.*, Woratit Onprasert, Sakol Nakdhamabhorn, Rachot Phuengsuk, Yuttana Itsarachaiyot, Choladawan Moonjaita, Syed Saqib Hussain
RoboCup@Home League 2013 Jackrit Suthakorn, Ph.D.*, Woratit Onprasert, Sakol Nakdhamabhorn, Rachot Phuengsuk, Yuttana Itsarachaiyot, Choladawan Moonjaita, Syed Saqib Hussain
Design and Controll of Haptic Glove with McKibben Pneumatic Muscle
 XXVIII. ASR '2003 Seminar, Instruments and Control, Ostrava, May 6, 2003 173 Design and Controll of Haptic Glove with McKibben Pneumatic Muscle KOPEČNÝ, Lukáš Ing., Department of Control and Instrumentation,
XXVIII. ASR '2003 Seminar, Instruments and Control, Ostrava, May 6, 2003 173 Design and Controll of Haptic Glove with McKibben Pneumatic Muscle KOPEČNÝ, Lukáš Ing., Department of Control and Instrumentation,
Update on the Precision Engineering Industry Transformation Map (PE ITM)
") Update on the Precision Engineering Industry Transformation Map (PE ITM) PE COI Conference 18 April 2018 DISCLAIMER EDB provides this presentation (including oral statements) gratuitously for information
Update on the Precision Engineering Industry Transformation Map (PE ITM) PE COI Conference 18 April 2018 DISCLAIMER EDB provides this presentation (including oral statements) gratuitously for information
Chapter 1 Introduction
 Chapter 1 Introduction It is appropriate to begin the textbook on robotics with the definition of the industrial robot manipulator as given by the ISO 8373 standard. An industrial robot manipulator is
Chapter 1 Introduction It is appropriate to begin the textbook on robotics with the definition of the industrial robot manipulator as given by the ISO 8373 standard. An industrial robot manipulator is
Towards Interactive Learning for Manufacturing Assistants. Andreas Stopp Sven Horstmann Steen Kristensen Frieder Lohnert
 Towards Interactive Learning for Manufacturing Assistants Andreas Stopp Sven Horstmann Steen Kristensen Frieder Lohnert DaimlerChrysler Research and Technology Cognition and Robotics Group Alt-Moabit 96A,
Towards Interactive Learning for Manufacturing Assistants Andreas Stopp Sven Horstmann Steen Kristensen Frieder Lohnert DaimlerChrysler Research and Technology Cognition and Robotics Group Alt-Moabit 96A,
CS594, Section 30682:
 CS594, Section 30682: Distributed Intelligence in Autonomous Robotics Spring 2003 Tuesday/Thursday 11:10 12:25 http://www.cs.utk.edu/~parker/courses/cs594-spring03 Instructor: Dr. Lynne E. Parker ½ TA:
CS594, Section 30682: Distributed Intelligence in Autonomous Robotics Spring 2003 Tuesday/Thursday 11:10 12:25 http://www.cs.utk.edu/~parker/courses/cs594-spring03 Instructor: Dr. Lynne E. Parker ½ TA:
Self-Adapting Parallel Kinematic Machines
 Self-Adapting Parallel Kinematic Machines Karl-Erik Neumann Exechon AB ABSTRACT Historically, assembly of large aerospace structures has always required large, heavy duty, expensive machines designed and
Self-Adapting Parallel Kinematic Machines Karl-Erik Neumann Exechon AB ABSTRACT Historically, assembly of large aerospace structures has always required large, heavy duty, expensive machines designed and
ROADMAP BACHELOR DEGREE OF ELECTRONIC ENGINEERING WITH HONOURS FACULTY OF ELECTRICAL AND ELECTRONIC ENGINEERING UNIVERSITI TUN HUSSEIN ONN MALAYSIA
 Nationhood Safety Health I Culture BEE 1103 I Islamic Asian BEE 1003 Creativity II Signals Analog s Digital s s I BEE 302 V Fields Waves Power s BEE 302 BEB 303 Circuits s I s I II YEAR Final Year I 1
Nationhood Safety Health I Culture BEE 1103 I Islamic Asian BEE 1003 Creativity II Signals Analog s Digital s s I BEE 302 V Fields Waves Power s BEE 302 BEB 303 Circuits s I s I II YEAR Final Year I 1
Maciej Karaszewski, Robert Sitnik
 www.cost.esf.org European Cooperation in Science and Technology Towards the automation and objectivity of 3D scanning Maciej Karaszewski, Robert Sitnik Warsaw University of Technology, Faculty of Mechatronics
www.cost.esf.org European Cooperation in Science and Technology Towards the automation and objectivity of 3D scanning Maciej Karaszewski, Robert Sitnik Warsaw University of Technology, Faculty of Mechatronics
Biologically Inspired Robot Manipulator for New Applications in Automation Engineering
 Preprint of the paper which appeared in the Proc. of Robotik 2008, Munich, Germany, June 11-12, 2008 Biologically Inspired Robot Manipulator for New Applications in Automation Engineering Dipl.-Biol. S.
Preprint of the paper which appeared in the Proc. of Robotik 2008, Munich, Germany, June 11-12, 2008 Biologically Inspired Robot Manipulator for New Applications in Automation Engineering Dipl.-Biol. S.
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics
 Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
Robotics Evolution: From Production Rate to Human Productivity
 Chetan Kapoor Senior Director of Technology Innovation Yaskawa America, Motoman Robotics Division Robotics Evolution: From Production Rate to Human Productivity 2016 YASKAWA America, Inc. YASKAWA.COM 100
Chetan Kapoor Senior Director of Technology Innovation Yaskawa America, Motoman Robotics Division Robotics Evolution: From Production Rate to Human Productivity 2016 YASKAWA America, Inc. YASKAWA.COM 100
Shape Memory Alloy Actuator Controller Design for Tactile Displays
 34th IEEE Conference on Decision and Control New Orleans, Dec. 3-5, 995 Shape Memory Alloy Actuator Controller Design for Tactile Displays Robert D. Howe, Dimitrios A. Kontarinis, and William J. Peine
34th IEEE Conference on Decision and Control New Orleans, Dec. 3-5, 995 Shape Memory Alloy Actuator Controller Design for Tactile Displays Robert D. Howe, Dimitrios A. Kontarinis, and William J. Peine
Bruno Siciliano Luigi Villani Vincenzo Lippiello. Francesca Cordella Mariacarla Staffa.
 1/20 Robotics @ PRISMA Lab Bruno Siciliano Luigi Villani Vincenzo Lippiello Fanny Ficuciello i Fabio Ruggiero Francesca Cordella Mariacarla Staffa www.prisma.unina.it i it 18 February 2010 City 1,200,000
1/20 Robotics @ PRISMA Lab Bruno Siciliano Luigi Villani Vincenzo Lippiello Fanny Ficuciello i Fabio Ruggiero Francesca Cordella Mariacarla Staffa www.prisma.unina.it i it 18 February 2010 City 1,200,000
Service Robots in an Intelligent House
 Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
Requirements Document. Gateway <04/17/12> Coaches: < Renée Andrews, Michael Ehrenfreid, Bryan Rich >
 Requirements Document Gateway Coaches: < Renée Andrews, Michael Ehrenfreid, Bryan Rich > Students: < Teja Aluru, Lane Baumgarten, Peter Cooper, Rob Giometti, David Kading, Shane Mathias, Russell
Requirements Document Gateway Coaches: < Renée Andrews, Michael Ehrenfreid, Bryan Rich > Students: < Teja Aluru, Lane Baumgarten, Peter Cooper, Rob Giometti, David Kading, Shane Mathias, Russell
Introduction. ELCT903, Sensor Technology Electronics and Electrical Engineering Department 1. Dr.-Eng. Hisham El-Sherif
 Introduction In automation industry every mechatronic system has some sensors to measure the status of the process variables. The analogy between the human controlled system and a computer controlled system
Introduction In automation industry every mechatronic system has some sensors to measure the status of the process variables. The analogy between the human controlled system and a computer controlled system
USNO Robotic Astrometric Telescope (URAT)
") USNO Robotic Astrometric Telescope (URAT) Charlie Finch USNO Speckle Automation Workshop Washington DC 2014 June 2 finch@usno.navy.mil USNO Robotic Astrometric Telescope (URAT) Outline of today s talk
USNO Robotic Astrometric Telescope (URAT) Charlie Finch USNO Speckle Automation Workshop Washington DC 2014 June 2 finch@usno.navy.mil USNO Robotic Astrometric Telescope (URAT) Outline of today s talk
PROCEEDINGS OF SPIE. Automated asphere centration testing with AspheroCheck UP
 PROCEEDINGS OF SPIE SPIEDigitalLibrary.org/conference-proceedings-of-spie Automated asphere centration testing with AspheroCheck UP F. Hahne, P. Langehanenberg F. Hahne, P. Langehanenberg, "Automated asphere
PROCEEDINGS OF SPIE SPIEDigitalLibrary.org/conference-proceedings-of-spie Automated asphere centration testing with AspheroCheck UP F. Hahne, P. Langehanenberg F. Hahne, P. Langehanenberg, "Automated asphere
Robotics. In Textile Industry: Global Scenario
 Robotics In Textile Industry: A Global Scenario By: M.Parthiban & G.Mahaalingam Abstract Robotics In Textile Industry - A Global Scenario By: M.Parthiban & G.Mahaalingam, Faculty of Textiles,, SSM College
Robotics In Textile Industry: A Global Scenario By: M.Parthiban & G.Mahaalingam Abstract Robotics In Textile Industry - A Global Scenario By: M.Parthiban & G.Mahaalingam, Faculty of Textiles,, SSM College
ROKVISS Verification of Advanced Tele-Presence Concepts for Future Space Missions
 ROKVISS Verification of Advanced Tele-Presence Concepts for Future Space Missions ASTRA 2002 Klaus Landzettel, Bernhard Brunner, Alexander Beyer, Erich Krämer, Carsten Preusche, Bernhard-Michael Steinmetz,
ROKVISS Verification of Advanced Tele-Presence Concepts for Future Space Missions ASTRA 2002 Klaus Landzettel, Bernhard Brunner, Alexander Beyer, Erich Krämer, Carsten Preusche, Bernhard-Michael Steinmetz,
Research Activities of the Mechatronic and Robotic Systems Laboratory
 Research Activities of the Mechatronic and Robotic Systems Laboratory Scott Nokleby, PhD, PEng Director scott.nokleby@uoit.ca mars.engineering.uoit.ca Current Projects Automation of Nuclear Fuel Manufacturing
Research Activities of the Mechatronic and Robotic Systems Laboratory Scott Nokleby, PhD, PEng Director scott.nokleby@uoit.ca mars.engineering.uoit.ca Current Projects Automation of Nuclear Fuel Manufacturing
PRODUCTS AND LAB SOLUTIONS
 PRODUCTS AND LAB SOLUTIONS Answering the most challenging academic questions with innovative technology and methods Quanser is the global leader in the design and manufacture of lab solutions and products
PRODUCTS AND LAB SOLUTIONS Answering the most challenging academic questions with innovative technology and methods Quanser is the global leader in the design and manufacture of lab solutions and products
Innovative Rear End Machining
 Product Information CNC Multi-Spindle Automatic Lathe Innovative Rear End Machining With many new and improved functions, the front-opening six-spindle lathe with up to twelve cross-slides in the work
Product Information CNC Multi-Spindle Automatic Lathe Innovative Rear End Machining With many new and improved functions, the front-opening six-spindle lathe with up to twelve cross-slides in the work
INTERNATIONAL STANDARD
 INTERNATIONAL STANDARD IEC 62092 First edition 2001-08 Utrasonics Hydrophones Characteristics and calibration in the frequency range from 15 MHz to 40 MHz Ultrasons Hydrophones Caractéristiques et étalonnage
INTERNATIONAL STANDARD IEC 62092 First edition 2001-08 Utrasonics Hydrophones Characteristics and calibration in the frequency range from 15 MHz to 40 MHz Ultrasons Hydrophones Caractéristiques et étalonnage
CS277 - Experimental Haptics Lecture 2. Haptic Rendering
 CS277 - Experimental Haptics Lecture 2 Haptic Rendering Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering A note on timing...
CS277 - Experimental Haptics Lecture 2 Haptic Rendering Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering A note on timing...
Automation and Control Electrical Engineering
 Automation and Control Electrical Engineering Technical University of Denmark DTU-Building 326 DK-2800 Kgs. Lyngby Denmark aut.elektro.dtu.dk Ole Ravn Total students ~9.300 including Ph.D. 1.150 and Int.
Automation and Control Electrical Engineering Technical University of Denmark DTU-Building 326 DK-2800 Kgs. Lyngby Denmark aut.elektro.dtu.dk Ole Ravn Total students ~9.300 including Ph.D. 1.150 and Int.
Electromechanical. NC Joining Systems. Flexible Solutions for Your Application
 Electromechanical NC Joining Systems Flexible Solutions for Your Application Electromechanical NC Joining Systems For joining and press-fit applications, electromechanical NC joining systems are increasingly
Electromechanical NC Joining Systems Flexible Solutions for Your Application Electromechanical NC Joining Systems For joining and press-fit applications, electromechanical NC joining systems are increasingly
Technical Cognitive Systems
 Part XII Actuators 3 Outline Robot Bases Hardware Components Robot Arms 4 Outline Robot Bases Hardware Components Robot Arms 5 (Wheeled) Locomotion Goal: Bring the robot to a desired pose (x, y, θ): (position
Part XII Actuators 3 Outline Robot Bases Hardware Components Robot Arms 4 Outline Robot Bases Hardware Components Robot Arms 5 (Wheeled) Locomotion Goal: Bring the robot to a desired pose (x, y, θ): (position
The DLR On-Orbit Servicing Testbed
 The DLR On-Orbit Servicing Testbed J. Artigas, R. Lampariello, B. Brunner, M. Stelzer, C. Borst, K. Landzettel, G. Hirzinger, A. Albu-Schäffer Robotics and Mechatronics Center, DLR VR-OOS Workshop 2012
The DLR On-Orbit Servicing Testbed J. Artigas, R. Lampariello, B. Brunner, M. Stelzer, C. Borst, K. Landzettel, G. Hirzinger, A. Albu-Schäffer Robotics and Mechatronics Center, DLR VR-OOS Workshop 2012
PICK AND PLACE HUMANOID ROBOT USING RASPBERRY PI AND ARDUINO FOR INDUSTRIAL APPLICATIONS
 PICK AND PLACE HUMANOID ROBOT USING RASPBERRY PI AND ARDUINO FOR INDUSTRIAL APPLICATIONS Bernard Franklin 1, Sachin.P 2, Jagadish.S 3, Shaista Noor 4, Rajashekhar C. Biradar 5 1,2,3,4,5 School of Electronics
PICK AND PLACE HUMANOID ROBOT USING RASPBERRY PI AND ARDUINO FOR INDUSTRIAL APPLICATIONS Bernard Franklin 1, Sachin.P 2, Jagadish.S 3, Shaista Noor 4, Rajashekhar C. Biradar 5 1,2,3,4,5 School of Electronics
Knowledge Representation and Cognition in Natural Language Processing
 Knowledge Representation and Cognition in Natural Language Processing Gemignani Guglielmo Sapienza University of Rome January 17 th 2013 The European Projects Surveyed the FP6 and FP7 projects involving
Knowledge Representation and Cognition in Natural Language Processing Gemignani Guglielmo Sapienza University of Rome January 17 th 2013 The European Projects Surveyed the FP6 and FP7 projects involving
Baxter Safety and Compliance Overview
 Baxter Safety and Compliance Overview How this unique collaborative robot safely manages operational risks Unlike typical industrial robots that operate behind safeguarding, Baxter, the collaborative robot
Baxter Safety and Compliance Overview How this unique collaborative robot safely manages operational risks Unlike typical industrial robots that operate behind safeguarding, Baxter, the collaborative robot
INDUSTRIAL ROBOTS AND ROBOT SYSTEM SAFETY
 INDUSTRIAL ROBOTS AND ROBOT SYSTEM SAFETY I. INTRODUCTION. Industrial robots are programmable multifunctional mechanical devices designed to move material, parts, tools, or specialized devices through
INDUSTRIAL ROBOTS AND ROBOT SYSTEM SAFETY I. INTRODUCTION. Industrial robots are programmable multifunctional mechanical devices designed to move material, parts, tools, or specialized devices through
ASSEMIC : A European Project for Advanced Microhandling and - assembly
 ASSEMIC : A European Project for Advanced Microhandling and - assembly Dr. Ana Almansa ASSEMIC Scientific Manager ARC Seibersdorf research GmbH Agenda Introduction: The project ASSEMIC Micropositioning
ASSEMIC : A European Project for Advanced Microhandling and - assembly Dr. Ana Almansa ASSEMIC Scientific Manager ARC Seibersdorf research GmbH Agenda Introduction: The project ASSEMIC Micropositioning
ACTUATORS AND SENSORS. Joint actuating system. Servomotors. Sensors
 ACTUATORS AND SENSORS Joint actuating system Servomotors Sensors JOINT ACTUATING SYSTEM Transmissions Joint motion low speeds high torques Spur gears change axis of rotation and/or translate application
ACTUATORS AND SENSORS Joint actuating system Servomotors Sensors JOINT ACTUATING SYSTEM Transmissions Joint motion low speeds high torques Spur gears change axis of rotation and/or translate application
Categories of Robots and their Hardware Components. Click to add Text Martin Jagersand
 Categories of Robots and their Hardware Components Click to add Text Martin Jagersand Click to add Text Robot? Click to add Text Robot? How do we categorize these robots? What they can do? Most robots
Categories of Robots and their Hardware Components Click to add Text Martin Jagersand Click to add Text Robot? Click to add Text Robot? How do we categorize these robots? What they can do? Most robots
Figure 2.1 a. Block diagram representation of a system; b. block diagram representation of an interconnection of subsystems
 1 Figure 2.1 a. Block diagram representation of a system; b. block diagram representation of an interconnection of subsystems 2 Table 2.1 Laplace transform table 3 Table 2.2 Laplace transform theorems
1 Figure 2.1 a. Block diagram representation of a system; b. block diagram representation of an interconnection of subsystems 2 Table 2.1 Laplace transform table 3 Table 2.2 Laplace transform theorems
2. Visually- Guided Grasping (3D)
") Autonomous Robotic Manipulation (3/4) Pedro J Sanz sanzp@uji.es 2. Visually- Guided Grasping (3D) April 2010 Fundamentals of Robotics (UdG) 2 1 Other approaches for finding 3D grasps Analyzing complete
Autonomous Robotic Manipulation (3/4) Pedro J Sanz sanzp@uji.es 2. Visually- Guided Grasping (3D) April 2010 Fundamentals of Robotics (UdG) 2 1 Other approaches for finding 3D grasps Analyzing complete