Sensor & Actuator. Bus system and Mission system
|
|
|
- Donald Elliott
- 5 years ago
- Views:
Transcription














, Mission &")

1 & Masahiko Yamazaki Department of Aerospace Engineering, College of Science and Technology, Nihon University, Japan. What is sensor & actuator? 2. What is sensor & actuator as a satellite? Use case of satellite sensor & actuator 3. What is sensor & actuator as a CanSat What is in CanSat? Design example of sensor & actuator as a CanSat 4. Summary 2 What is sensor & actuator? The role of sensor &actuator is a device that detects and responds to some type of input from the physical environment. The specific input could be light, heat, motion, moisture, pressure, or any one of a great number of other environmental phenomena. The output is generally a signal. The main task of sensor is to detect a satellite condition, e.g. battery voltage, solar cell current, thermal and attitude, etc. is device that takes energy and converts it into some kind of motion. It is operated by a source of energy, typically electric current, fluid pressure, or air pressure, and converts that energy into motion. The main task of actuator is to control a satellite condition, e.g. orbit and attitude, deployment of solar panel and antenna, etc. 3 Indispensable components for a satellite Not only a single body performance but also consider relation with others. Component performance: Measurement range and accuracy. Other subsystems: C&DH subsystem(data control), Mission & ADC subsystem(data use), subsystem(data transmit). Peripheral circuit: A/D converter, amp, filter. Component Interface: Serial (UART, SPI, I2C,...), Discrete 4 What is sensor & actuator as a satellite? Bus system and Mission system Bus System System for survival in space and management of whole system Power subsystem Mission System e.g. experimental module, observation sensor,camera, Attitude determination and control (ADC) Structure Serial PWM Structure Command and Data handling (C&DH) Structure Thermal control (Harness)






















2 What is sensor & actuator as a satellite? 5 Uplink 6 What is sensor & actuator as a satellite? Downlink Structure example Solar cell Battery Receiver Electrical power supply OBC Voltage Temperature Current Magnetism Sun lightdownlink Uplink Acceleration Angular velocity Memory S S2 Sn voltage, temperature, current, attitude sensors Experimental system Camera etc. Thruster Torquer Reaction wheel Mission Subsystem Solar cell 7 Transmitter Downlink Uplink example Reaction wheel Magnetic torque Ground Station & are closely related with C&DH subsystem. Data communication rate, Sampling interval, Memory size, Control interval, etc. Ground Station 8 & are closely related with other subsystems Electrical power supply,, Structure, Command & data handling subsystem. power consumption, data amount(memory size, sampling interval, downlink format), operation order, component layout, etc Downlink Uplink Downlink Uplink Ground Station Ground Station

![order] Magnetic sensor](/docs-images/87/96659184/images/3-4.jpg "(with radio")



 Li-ion")

 Temperature")










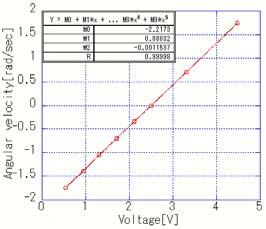
3 Magnetic flux density [gauss] 9 [Operation order] Magnetic sensor (with radio communication noise) CW started Bx By Bz Time [sec] Temperature (Celsius) [Components layout] Thermal sensor (Inner and Outer components) Li-ion battery # Receiver Gyro # 2 Digi-talker Time (sec) Temperature (Celsius) Solar panel Solar panel 2 Solar panel 4 Solar panel 5 Solar panel 3 Solar panel Eclipse - -2 Daytime Time (sec) [Components layout] Sun sensor (Outer panel of CubeSat) 2 Use case of satellite sensor & actuator Attitude determination and control subsystem [mm] [mm] [mm] Attitude determination = determination of the directional vector of each body axis Attitude control = to control the directional vector to required value sat sat sat sat R = é ù ê e e e ë x y z ú û












")

 z y x Aerodynamic drag Solar radiation")



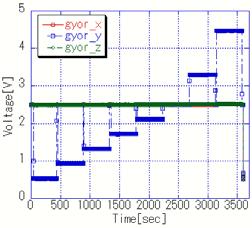
4 3 Use case of satellite sensor & actuator 4 Attitude determination and control subsystem Attitude determination sensor For example, extended Kalman filter by using sun sensors, geomagnetic sensors, and gyro sensors Use case of satellite sensor & actuator Attitude determination and control subsystem Attitude control actuator For example, 3 axis control by magnetic torquer Internal force Momentum wheel, Reaction wheel Reference direction Relative angle Sun sensor Control moment gyro Earth sensor Star tracker RF sensor Attitude control actuator Thruster Cold gas jet Monopropellant(catalytic hydrazine ) Bipropellant (oxidizer and fuel) for attitude determination Attitude motion Field Angular velocity Geomagnetic sensor Mechanical gyro Optical gyro MEMS gyro External force Gravity gradient torque Geomagnetic torque Ion engine Gas-liquid equilibrium thruster Extensible boom Magnetic torquer Acceleration Accelerometer Permanent magnet Relative position Position receiver Aerodynamic drag Dragshute Solar radiation pressure Deployable membrane 5 Use case of satellite sensor & actuator 6 Attitude determination and control subsystem Attitude control actuator For example, 3 axis control by magnetic torquer Internal force Momentum wheel, Reaction wheel Control moment gyro Use case of satellite sensor & actuator Attitude determination and control subsystem A/D converter, Filter and Amp. Attitude control actuator Thruster Cold gas jet Monopropellant(catalytic hydrazine ) Bipropellant (oxidizer and fuel) External force Gravity gradient torque Geomagnetic torque Ion engine Solar sail IKAROS Gas-liquid equilibrium thruster Extensible boom Magnetic torquer Permanent magnet Output Voltage (V) y z x Output Voltage (V) z y x Aerodynamic drag Solar radiation pressure Dragshute Deployable membrane Low pass filter for gyro sensor




 Pulse Width")




 and affected each")



5 7 Attitude determination and control subsystem Current control. Memory Data storage Use case of satellite sensor & actuator OBC Control input (digital signal) Current control (PWM, Motor driver) 8 Use case of satellite sensor & actuator Attitude determination and control subsystem Ex. De-spin control by Magnetic Torquer Amp Filter Output voltage (Analog signal) Gyro 3axis Pulse width modulation(pwm) Pulse Width Modulation is a simple method for controlling analog devices via a digital signal. It s a very efficient way to drive motors. Data storage Memory OBC Command (Digital signal) Output voltage (Digital signal) Control input AD convertor Current control (PWM, Motor driver) Galvanometer Magnetic Torquer Pulse width modulation 9 & are closely related with other subsystems (Electrical power supply,, Structure, ) and affected each other. power consumption, data amount(memory size, sampling interval, downlink format), operation order, component layout, etc It is important to extract performance as a system. It is important to consider the interference between sub-systems Downlink Uplink The mission sequence should be imaged well, discussed, and should be shared well in the team. CanSat? Ground Station


 e.g.")
")



 and")

,")
, etc")


6 2 What is in CanSat? 22 What is in CanSat? Bus system and Mission system Bus System Mission System System for survival in space and management of whole system Power subsystem Attitude determination and control (ADC) e.g. experimental module, observation sensor, camera, Command and Data handling (C&DH) Structure (Harness) 23 What is in CanSat? 24 What is in CanSat? example Voltage Temperature Current Magnetism Sun light Acceleration Angular velocity example Motor & are closely concerned with other subsystems (electrical power supply, communication, structure, command & data handling) and affected each other. data amount(memory size, downlink format), number of sensor & example actuator, sampling interval(mpu spec), control algorithm, control interval, layout, noise(filter, Operation), etc Voltage Temperature The desired performance not by itself alone but as a system Currentis required. Magnetism Design the sensor & actuator under the consideration of Sunthe light communication and interaction with other subsystems. Acceleration Angular velocity example Motor
7 25 26 The mission sequence should be imaged well, discussed, and should be shared well in the team. Separation Imagine all the possible events and Separation anomalies which may happen on CanSat and prepare countermeasures for them as many as possible. Uplink Downlink Autonomous Flight Uplink Downlink Autonomous Flight Launch Ground station Objective point Launch Ground station Objective point Step: and selection Consider requirement(weight, dimension), Separation environmental condition(vibration, acceleration, thermal), flight time, etc from past experience Consider Mission Sequence & clarify requirements () Set up CanSat and put it into a rocket and turn on switch A. (2) Rocket side prepare launch (you cannot contact and not Downlink predict the time) Autonomous Flight (3) Launch with Uplink high acceleration (CanSat may measure something in a rocket and write in memory) (4) CanSat Starts certain operation triggered by some switch at the timing of release from the rocket. (5) Downlink mission data as well as write in memory. (6) Landing may trigger also another actions. Launch Ground station Objective point ing: to be detected considering what kind of sensors are available and how easy to implement Temperature, Pressure,, Accelerometer, Sun light, Gyro, Ultra violet, Sound, Infra red, Actuation: available actuators, power, force, etc Motor, Nichrome line to cut nylon wire, Magnet, Utilization of shock of landing, Spring, Gravity, High level actions: combination of sensor, actuator & other systems Guidance/control with (comeback), camera, stand up, moving a er landing, Step: and selection What kind of sensors & actuator are available. How easy to implement Spec(How accurate?, How often?), Environmental tolerance, Power consumption, Data form(digital/analog) and Interface(I2C, Serial, UART), Size, Weight, Operating voltage )









 3.3V line 5V line 3.")

8 29 Mission Example 3 Mission Example Launch! Save sensor data ( & Pressure) separation! Release from the Rocket deployment Altitude <=6ft release (Pressure & ) deployment separation! Direction control start! Power ON Direction control (Servo Motor & ) Landing Direction control start! 3 Mission Example Launch! Save sensor data ( & Pressure) 32 Receiver Transmitter 3.3V Regulator Release from the Rocket Altitude <=6ft release (Pressure & ) Battery 3.2V 5V Regulator Electrical power supply Pressure deployment deployment EEPROM OBC PWM Servo Motor Power ON Direction control (Servo Motor & ) 3.3V line 5V line 3.7V line Flag Relay switch Landing 3.2V line Data communication line Other line
9 33 34 Receiver Transmitter Analog with A/D converter, Filter and Amp. 3.3V Regulator Battery 3.2V 5V Regulator Pressure Electrical power supply EEPROM 3.3V line 5V line 3.7V line OBC PWM Flag Servo Motor Relay switch Digital 3.2V line Data communication line Other line 35 A/D converter A/D converter convert analog data from sensors into digital data. bit A/D converter can express analog data into bit digital data. In case of reference voltage is 5V V 3V 5V V~5V is expressed in 2=24 steps. 36 Serial & Parallel communication sending side input b7 b6 b5 b4 b3 b2 b b CLK Line Data Line receiving side output b7 b6 b5 b4 b3 b2 b b (I2C,UART,SPI, ) is a process of sending data one bit at a time, sequentially. Parallel communication Parallel communication is a process of sending data several data signals simultaneously over several parallel channels.
 Pulse")



 5.{ 6. int i; 7. while() 8. { 9.")
; 3. output_low(pin_b3); 4.")


.")


 Spec(How accurate?, How often?")
 and")
 Battery 3.")
10 37 Servo motor 38 Servo motor Pulse width modulation Pulse width modulation(pwm) Pulse Width Modulation is a simple method for controlling analog devices via a digital signal. It s a very efficient way to drive motors. Sample Program. #include<6f877.h> 2.#fuses HS, NOWDT, NOPROTECT, PUT, BROWNOUT, NOLVP 3.#use delay (CLOCK = ) 4.void main() 5.{ 6. int i; 7. while() 8. { 9. for(i=;i<;i++). {. output_high(pin_b3); 2. delay_us(5); 3. output_low(pin_b3); 4. delay_us(65); 5. } 6. } 7.} V+ V Pulse width =5us Period =8us 39 to cut nylon wire Separation! 5V +V PIC in R2 k Q PNP with Relay drive circuit PIC s high/low signal can control the relay switch condition(on/off). PIC signal High Low D + DIODE - Relay drive circuit Relay switch condition OFF ON VcSW STTL 3.2V + Nichrom Wire 4 Step2: and Assembly :System design & Operation check( & spec check) Spec(How accurate?, How often?), Environmental tolerance, Power consumption, Data form(digital/analog) and Interface(I2C, Serial, UART), Size, Weight, Operating voltage ) Battery 3.2V Electrical power supply EEPROM 3.3V line 5V line 3.7V line 3.2V line 3.3V Regulator 5V Regulator OBC Data communication line Other line PWM Flag Receiver Pressure Servo Motor Relay switch Transmitter









, Environmental Servo Motor")
,")











11 4 42 Step3: and Integration & Test Receiver Assemble sensor & actuator with other subsystem as Receiver a CanSat. Transmitter Transmitter 3.3V Regulator Battery 3.2V 5V Regulator Pressure Battery 3.2V OBC PWM EEPROM 5V Regulator Try as many ground testpower assupply possible in various settings Electrical operation of CanSat. Electrical power supply Integration is carried out taking into consideration the problem which may arise at the 3.3V Regulator Battery 3.7V time of integration. (CCA-552JZ) Power consumption, layout, algorithm, operation sequence, interference. Test is carried out to ensureobc normal operation of CanSat. (PIC6F877) Integrated check as PWM a CanSat), Environmental Servo Motor EEPROMtesting(performance (S32) Testing(thermal, vibration, etc), Calibration, Operation Testing Servo Motor Flag Relay switch Flag Relay switch Satellite or CanSat cannot always be experimented or confirmed under the 5V line circumstance that is similar to the real one. 3.7V line 3.3V line 5V line Pressure (PSM/2KPG) to ensure normal 3.7V line 3.2V line Results of number of connected in Dataexperiments communication line and confirmation tests are order to build a trustworthy system. Other line 3.2V line Data communication line Other line Structure 43 Electric power verification Test Launch! Save sensor data ( & Pressure) Release from the Rocket Altitude <=6ft release (Pressure & Nichrom wire) deployment deployment 44 Control Algorithm & Ground test Direction of movement Objective point () Neutral Right small turn 4.4 Main Battery 4.2 Direction control (Servo Motor & ) Voltage [V] Power ON Servo Battery Waiting for launch Servo system is ON(hour) Landing 3.2 Left large turn North latitude [deg.] Right large turn Left small turn Time [sec] 2 25 East longitude [deg.]



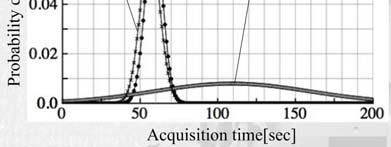


12 45 performance test 46 Interference -MPU Wind-tunnel test Radio shielding sheet Flight Test 47 Interference - 48 Balloon experiment Balloon Magnetic flux density [gauss] CW started Bx By Bz Time [sec] OPEN ~5m Reel CanSat Ground Station 48


, Environmental tolerance, Power")
, Size, Weight,")


, Environmental")

![latitude [deg.] North latitude [deg.](/docs-images/87/96659184/images/13-13.jpg "] Imagine the flight as completely as")





13 49 Balloon experiment 5 Step: Balloon experiment and selection What kind of sensors & actuator are available. How easy to implement Spec(How accurate?, How often?), Environmental tolerance, Power consumption, Data form(digital/analog), Size, Weight, Operating voltage ) Step2: and Assembly Step3: and Integration & Test Power consumption, layout, algorithm, operation sequence, interference, Integrated testing(performance check as a CanSat), Environmental Testing(thermal, vibration, etc), Calibration, Operation Testing North latitude [deg.] North latitude [deg.] Imagine the flight as completely as possible! It is important to consider the interference between sub-systems. Confirm the sequence of the mission, and check the validity of the sensor data and the actuator motion, the success of the communication, the power consumption of the batteries, and so on. East longitude [deg.] East longitude [deg.] 5 Operation mode control 52 Antenna deployment mechanism Mode Control Example by Level detection IC Low battery voltage Operation control High battery voltage Shunt control













14 53 Sun sensor For example, our SPROUT mounts 6 sun sensors 54 Sun sensor(using solar cell current) Hood Pinhole Sun sensor Position Sensitive Detector 55 Calibration 56 Manufacturing Bearing Torque rod Slide rail Bearing Coil wire









15 57 CanSat for CubeSat Summary In this lecture, I talked about Role of sensor and actuator. Design example of satellite and CanSat sensor and actuator subsystem. I think, The main task of sensor is to detect a satellite condition, e.g. battery voltage, solar cell current, thermal and attitude, etc. The main task of actuator is to control a satellite condition, e.g. orbit and attitude, deployment of solar panel and antenna, etc. Imagine the flight as completely as possible! Mission Objective Assembly, integration & test of part of CubeSat (, Data communication, Data save) Mission sequence simulation of part of CubeSat
Satellite Testing. Prepared by. A.Kaviyarasu Assistant Professor Department of Aerospace Engineering Madras Institute Of Technology Chromepet, Chennai
 Satellite Testing Prepared by A.Kaviyarasu Assistant Professor Department of Aerospace Engineering Madras Institute Of Technology Chromepet, Chennai @copyright Solar Panel Deployment Test Spacecraft operating
Satellite Testing Prepared by A.Kaviyarasu Assistant Professor Department of Aerospace Engineering Madras Institute Of Technology Chromepet, Chennai @copyright Solar Panel Deployment Test Spacecraft operating
Reaching for the Stars
 Satellite Research Centre Reaching for the Stars Kay-Soon Low Centre Director School of Electrical & Electronic Engineering Nanyang Technological University 1 Satellite Programs @SaRC 2013 2014 2015 2016
Satellite Research Centre Reaching for the Stars Kay-Soon Low Centre Director School of Electrical & Electronic Engineering Nanyang Technological University 1 Satellite Programs @SaRC 2013 2014 2015 2016
CubeSat Proximity Operations Demonstration (CPOD) Vehicle Avionics and Design
 Vehicle Avionics and Design") CubeSat Proximity Operations Demonstration (CPOD) Vehicle Avionics and Design August CubeSat Workshop 2015 Austin Williams VP, Space Vehicles CPOD: Big Capability in a Small Package Communications ADCS
CubeSat Proximity Operations Demonstration (CPOD) Vehicle Avionics and Design August CubeSat Workshop 2015 Austin Williams VP, Space Vehicles CPOD: Big Capability in a Small Package Communications ADCS
Satellite Sub-systems
 Satellite Sub-systems Although the main purpose of communication satellites is to provide communication services, meaning that the communication sub-system is the most important sub-system of a communication
Satellite Sub-systems Although the main purpose of communication satellites is to provide communication services, meaning that the communication sub-system is the most important sub-system of a communication
KUTESat. Pathfinder. Presented by: Marco Villa KUTESat Project Manager. Kansas Universities Technology Evaluation Satellite
 KUTESat Kansas Universities Technology Evaluation Satellite Pathfinder Presented by: Marco Villa KUTESat Project Manager Cubesat Developers' Workshop - San Luis Obispo, CA - April 8-10, 2004 SUMMARY Objectives
KUTESat Kansas Universities Technology Evaluation Satellite Pathfinder Presented by: Marco Villa KUTESat Project Manager Cubesat Developers' Workshop - San Luis Obispo, CA - April 8-10, 2004 SUMMARY Objectives
Sensors for orientation and control of satellites and space probes
 Sensors for orientation and control of satellites and space probes Ing. Ondrej Závodský GOSPACE s.r.o. ESA Contract No. 4000117400/16NL/NDe Specialized lectures Content 1) How to determine the orientation
Sensors for orientation and control of satellites and space probes Ing. Ondrej Závodský GOSPACE s.r.o. ESA Contract No. 4000117400/16NL/NDe Specialized lectures Content 1) How to determine the orientation
ncube Spacecraft Specification Document
 ncube Spacecraft Specification Document 1. INTRODUCTION The Norwegian student satellite, ncube, is an experimental spacecraft that was developed and built by students from four Norwegian universities in
ncube Spacecraft Specification Document 1. INTRODUCTION The Norwegian student satellite, ncube, is an experimental spacecraft that was developed and built by students from four Norwegian universities in
Pico-Satellite Training Kit HEPTA-Sat: Hands-on Practices for Space Engineering
 College of Science and Technology Pico-Satellite Training Kit HEPTA-Sat: Hands-on Practices for Space Engineering Masahiko Yamazaki(Nihon University) Pre-Symposium Hands-on Workshop at Stellenbosch University(Dec.
College of Science and Technology Pico-Satellite Training Kit HEPTA-Sat: Hands-on Practices for Space Engineering Masahiko Yamazaki(Nihon University) Pre-Symposium Hands-on Workshop at Stellenbosch University(Dec.
Introduction. Satellite Research Centre (SaRC)
") SATELLITE RESEARCH CENTRE - SaRC Introduction The of NTU strives to be a centre of excellence in satellite research and training of students in innovative space missions. Its first milestone satellite
SATELLITE RESEARCH CENTRE - SaRC Introduction The of NTU strives to be a centre of excellence in satellite research and training of students in innovative space missions. Its first milestone satellite
SNIPE mission for Space Weather Research. CubeSat Developers Workshop 2017 Jaejin Lee (KASI)
") SNIPE mission for Space Weather Research CubeSat Developers Workshop 2017 Jaejin Lee (KASI) New Challenge with Nanosatellites In observing small-scale plasma structures, single satellite inherently suffers
SNIPE mission for Space Weather Research CubeSat Developers Workshop 2017 Jaejin Lee (KASI) New Challenge with Nanosatellites In observing small-scale plasma structures, single satellite inherently suffers
FLCS V2.1. AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station
 AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station The platform provides a high performance basis for electromechanical system control. Originally designed for autonomous aerial vehicle
AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station The platform provides a high performance basis for electromechanical system control. Originally designed for autonomous aerial vehicle
The STU-2 CubeSat Mission and In-Orbit Test Results
 30 th Annual AIAA/USU Conference on Small Satellite SSC16-III-09 The STU-2 CubeSat Mission and In-Orbit Test Results Shufan Wu, Wen Chen, Caixia Chao Shanghai Engineering Centre for Microsatellites 99
30 th Annual AIAA/USU Conference on Small Satellite SSC16-III-09 The STU-2 CubeSat Mission and In-Orbit Test Results Shufan Wu, Wen Chen, Caixia Chao Shanghai Engineering Centre for Microsatellites 99
A CubeSat-Based Optical Communication Network for Low Earth Orbit
 A CubeSat-Based Optical Communication Network for Low Earth Orbit Richard Welle, Alexander Utter, Todd Rose, Jerry Fuller, Kristin Gates, Benjamin Oakes, and Siegfried Janson The Aerospace Corporation
A CubeSat-Based Optical Communication Network for Low Earth Orbit Richard Welle, Alexander Utter, Todd Rose, Jerry Fuller, Kristin Gates, Benjamin Oakes, and Siegfried Janson The Aerospace Corporation
An Overview of the Recent Progress of UCF s CubeSat Program
 An Overview of the Recent Progress of UCF s CubeSat Program AMSAT Space Symposium Oct. 26-28, 2012 Jacob Belli Brad Sease Dr. Eric T. Bradley Dr. Yunjun Xu Dr. Kuo-Chi Lin 1/31 Outline Past Projects Senior
An Overview of the Recent Progress of UCF s CubeSat Program AMSAT Space Symposium Oct. 26-28, 2012 Jacob Belli Brad Sease Dr. Eric T. Bradley Dr. Yunjun Xu Dr. Kuo-Chi Lin 1/31 Outline Past Projects Senior
Orbicraft Pro Complete CubeSat kit based on Raspberry-Pi
 Orbicraft Pro Complete CubeSat kit based on Raspberry-Pi (source IAA-AAS-CU-17-10-05) Speaker: Roman Zharkikh Authors: Roman Zharkikh Zaynulla Zhumaev Alexander Purikov Veronica Shteyngardt Anton Sivkov
Orbicraft Pro Complete CubeSat kit based on Raspberry-Pi (source IAA-AAS-CU-17-10-05) Speaker: Roman Zharkikh Authors: Roman Zharkikh Zaynulla Zhumaev Alexander Purikov Veronica Shteyngardt Anton Sivkov
THE RESEARCH AND DEVELOPMENT OF THE USM NANOSATELLITE FOR REMOTE SENSING MISSION
 THE RESEARCH AND DEVELOPMENT OF THE USM NANOSATELLITE FOR REMOTE SENSING MISSION Md. Azlin Md. Said 1, Mohd Faizal Allaudin 2, Muhammad Shamsul Kamal Adnan 2, Mohd Helmi Othman 3, Nurulhusna Mohamad Kassim
THE RESEARCH AND DEVELOPMENT OF THE USM NANOSATELLITE FOR REMOTE SENSING MISSION Md. Azlin Md. Said 1, Mohd Faizal Allaudin 2, Muhammad Shamsul Kamal Adnan 2, Mohd Helmi Othman 3, Nurulhusna Mohamad Kassim
CubeSat Proximity Operations Demonstration (CPOD) Mission Update Cal Poly CubeSat Workshop San Luis Obispo, CA
 Mission Update Cal Poly CubeSat Workshop San Luis Obispo, CA") CubeSat Proximity Operations Demonstration (CPOD) Mission Update Cal Poly CubeSat Workshop San Luis Obispo, CA 04-22-2015 Austin Williams VP, Space Vehicles ConOps Overview - Designed to Maximize Mission
CubeSat Proximity Operations Demonstration (CPOD) Mission Update Cal Poly CubeSat Workshop San Luis Obispo, CA 04-22-2015 Austin Williams VP, Space Vehicles ConOps Overview - Designed to Maximize Mission
Attitude Determination and Control Specifications
 Attitude Determination and Control Specifications 1. SCOPE The attitude determination and control sub system will passively control the orientation of the two twin CubeSats. 1.1 General. This specification
Attitude Determination and Control Specifications 1. SCOPE The attitude determination and control sub system will passively control the orientation of the two twin CubeSats. 1.1 General. This specification
SPACE. (Some space topics are also listed under Mechatronic topics)
") SPACE (Some space topics are also listed under Mechatronic topics) Dr Xiaofeng Wu Rm N314, Bldg J11; ph. 9036 7053, Xiaofeng.wu@sydney.edu.au Part I SPACE ENGINEERING 1. Vision based satellite formation
SPACE (Some space topics are also listed under Mechatronic topics) Dr Xiaofeng Wu Rm N314, Bldg J11; ph. 9036 7053, Xiaofeng.wu@sydney.edu.au Part I SPACE ENGINEERING 1. Vision based satellite formation
NCUBE: The first Norwegian Student Satellite. Presenters on the AAIA/USU SmallSat: Åge-Raymond Riise Eystein Sæther
 NCUBE: The first Norwegian Student Satellite Presenters on the AAIA/USU SmallSat: Åge-Raymond Riise Eystein Sæther Motivation Build space related competence within: mechanical engineering, electronics,
NCUBE: The first Norwegian Student Satellite Presenters on the AAIA/USU SmallSat: Åge-Raymond Riise Eystein Sæther Motivation Build space related competence within: mechanical engineering, electronics,
Implementation of three axis magnetic control mode for PISAT
 Implementation of three axis magnetic control mode for PISAT Shashank Nagesh Bhat, Arjun Haritsa Krishnamurthy Student, PES Institute of Technology, Bangalore Prof. Divya Rao, Prof. M. Mahendra Nayak CORI
Implementation of three axis magnetic control mode for PISAT Shashank Nagesh Bhat, Arjun Haritsa Krishnamurthy Student, PES Institute of Technology, Bangalore Prof. Divya Rao, Prof. M. Mahendra Nayak CORI
The Evolution of Nano-Satellite Proximity Operations In-Space Inspection Workshop 2017
 The Evolution of Nano-Satellite Proximity Operations 02-01-2017 In-Space Inspection Workshop 2017 Tyvak Introduction We develop miniaturized custom spacecraft, launch solutions, and aerospace technologies
The Evolution of Nano-Satellite Proximity Operations 02-01-2017 In-Space Inspection Workshop 2017 Tyvak Introduction We develop miniaturized custom spacecraft, launch solutions, and aerospace technologies
B ==================================== C
 Satellite Space Segment Communication Frequencies Frequency Band (GHz) Band Uplink Crosslink Downlink Bandwidth ==================================== C 5.9-6.4 3.7 4.2 0.5 X 7.9-8.4 7.25-7.7575 0.5 Ku 14-14.5
Satellite Space Segment Communication Frequencies Frequency Band (GHz) Band Uplink Crosslink Downlink Bandwidth ==================================== C 5.9-6.4 3.7 4.2 0.5 X 7.9-8.4 7.25-7.7575 0.5 Ku 14-14.5
HEMERA Constellation of passive SAR-based micro-satellites for a Master/Slave configuration
 HEMERA Constellation of passive SAR-based micro-satellites for a Master/Slave HEMERA Team Members: Andrea Bellome, Giulia Broggi, Luca Collettini, Davide Di Ienno, Edoardo Fornari, Leandro Lucchese, Andrea
HEMERA Constellation of passive SAR-based micro-satellites for a Master/Slave HEMERA Team Members: Andrea Bellome, Giulia Broggi, Luca Collettini, Davide Di Ienno, Edoardo Fornari, Leandro Lucchese, Andrea
From the Delfi-C3 nano-satellite towards the Delfi-n3Xt nano-satellite
 From the Delfi-C3 nano-satellite towards the Delfi-n3Xt nano-satellite Geert F. Brouwer, Jasper Bouwmeester Delft University of Technology, The Netherlands Faculty of Aerospace Engineering Chair of Space
From the Delfi-C3 nano-satellite towards the Delfi-n3Xt nano-satellite Geert F. Brouwer, Jasper Bouwmeester Delft University of Technology, The Netherlands Faculty of Aerospace Engineering Chair of Space
UCISAT-1. Current Completed Model. Former Manufactured Prototype
 UCISAT-1 2 Current Completed Model Former Manufactured Prototype Main Mission Objectives 3 Primary Mission Objective Capture an image of Earth from LEO and transmit it to the K6UCI Ground Station on the
UCISAT-1 2 Current Completed Model Former Manufactured Prototype Main Mission Objectives 3 Primary Mission Objective Capture an image of Earth from LEO and transmit it to the K6UCI Ground Station on the
Design of a Free Space Optical Communication Module for Small Satellites
 Design of a Free Space Optical Communication Module for Small Satellites Ryan W. Kingsbury, Kathleen Riesing Prof. Kerri Cahoy MIT Space Systems Lab AIAA/USU Small Satellite Conference August 6 2014 Problem
Design of a Free Space Optical Communication Module for Small Satellites Ryan W. Kingsbury, Kathleen Riesing Prof. Kerri Cahoy MIT Space Systems Lab AIAA/USU Small Satellite Conference August 6 2014 Problem
Platform Independent Launch Vehicle Avionics
 Platform Independent Launch Vehicle Avionics Small Satellite Conference Logan, Utah August 5 th, 2014 Company Introduction Founded in 2011 The Co-Founders blend Academia and Commercial Experience ~20 Employees
Platform Independent Launch Vehicle Avionics Small Satellite Conference Logan, Utah August 5 th, 2014 Company Introduction Founded in 2011 The Co-Founders blend Academia and Commercial Experience ~20 Employees
Istanbul Technical University Faculty of Aeronautics and Astronautics Space Systems Design and Test Laboratory
 Title: Space Advertiser (S-VERTISE) Primary POC: Aeronautics and Astronautics Engineer Hakan AYKENT Organization: Istanbul Technical University POC email: aykent@itu.edu.tr Need Worldwide companies need
Title: Space Advertiser (S-VERTISE) Primary POC: Aeronautics and Astronautics Engineer Hakan AYKENT Organization: Istanbul Technical University POC email: aykent@itu.edu.tr Need Worldwide companies need
A Constellation of CubeSats for Amazon Rainforest Deforestation Monitoring
 4 th IAA Conference on University Satellites s & CubeSat Workshop - Rome, Italy - December 7, 2017 1 / 17 A Constellation of CubeSats for Monitoring Fernanda Cyrne Pedro Beghelli Iohana Siqueira Lucas
4 th IAA Conference on University Satellites s & CubeSat Workshop - Rome, Italy - December 7, 2017 1 / 17 A Constellation of CubeSats for Monitoring Fernanda Cyrne Pedro Beghelli Iohana Siqueira Lucas
FRL's Demonstration and Science Experiments (DSX) rogram Quest for the Common Micro Satellite Bus
 rogram Quest for the Common Micro Satellite Bus") FRL's Demonstration and Science Experiments (DSX) rogram Quest for the Common Micro Satellite Bus 21st Annual Conference on Small Satellites August 13-16, 16, 2007 Logan, Utah N. Greg Heinsohn DSX HSB
FRL's Demonstration and Science Experiments (DSX) rogram Quest for the Common Micro Satellite Bus 21st Annual Conference on Small Satellites August 13-16, 16, 2007 Logan, Utah N. Greg Heinsohn DSX HSB
GEM - Generic Engineering Model Overview
 GEM - Generic Engineering Model 2 Introduction The GEM has been developed by ISIS with the ambition to offer a starting point for new nanosatellite missions. The system allows satellite developers to get
GEM - Generic Engineering Model 2 Introduction The GEM has been developed by ISIS with the ambition to offer a starting point for new nanosatellite missions. The system allows satellite developers to get
Michigan Multipurpose MiniSat M-Cubed. Kiril Dontchev Summer CubeSat Workshop: 8/9/09
 Michigan Multipurpose MiniSat M-Cubed Kiril Dontchev Summer CubeSat Workshop: 8/9/09 Michigan NanoSat Pipeline Inputs Outputs U of M Ideas Innovative technology Entrepreneurial thought Science Papers Flight
Michigan Multipurpose MiniSat M-Cubed Kiril Dontchev Summer CubeSat Workshop: 8/9/09 Michigan NanoSat Pipeline Inputs Outputs U of M Ideas Innovative technology Entrepreneurial thought Science Papers Flight
Development of Microsatellite to Detect Illegal Fishing MS-SAT
 Development of Microsatellite to Detect Illegal Fishing MS-SAT Ernest S. C. P. Bintang A.S.W.A.M. Department of Aerospace Engineering Faculty of Mechanical and Aerospace Engineering Institut Teknologi
Development of Microsatellite to Detect Illegal Fishing MS-SAT Ernest S. C. P. Bintang A.S.W.A.M. Department of Aerospace Engineering Faculty of Mechanical and Aerospace Engineering Institut Teknologi
Satellite Engineering Research at US Prof Herman Steyn
 Satellite Engineering Research at US Prof Herman Steyn History (SUNSAT-1) Graduate student project Over 100 students 1992-2001 Microsatellite with 15m GSD 3-band multi-spectral pushbroom imager Launch
Satellite Engineering Research at US Prof Herman Steyn History (SUNSAT-1) Graduate student project Over 100 students 1992-2001 Microsatellite with 15m GSD 3-band multi-spectral pushbroom imager Launch
University. Federal University of Santa Catarina (UFSC) Florianópolis/SC - Brazil. Brazil. Embedded Systems Group (UFSC)
 Florianópolis/SC - Brazil. Brazil. Embedded Systems Group (UFSC)") University 1 Federal University of Santa Catarina (UFSC) Florianópolis/SC - Brazil Brazil Agenda 2 Partnership Introduction Subsystems Payload Communication System Power System On-Board Computer Attitude
University 1 Federal University of Santa Catarina (UFSC) Florianópolis/SC - Brazil Brazil Agenda 2 Partnership Introduction Subsystems Payload Communication System Power System On-Board Computer Attitude
YamSat. YamSat Introduction. YamSat Team Albert Lin (NSPO) Yamsat website
 Yamsat website") Introduction Team Albert Lin (NSPO) Yamsat website http://www.nspo.gov.tw Major Characteristics Mission: Y: Young, developed by young people. A: Amateur Radio Communication M: Micro-spectrometer payload
Introduction Team Albert Lin (NSPO) Yamsat website http://www.nspo.gov.tw Major Characteristics Mission: Y: Young, developed by young people. A: Amateur Radio Communication M: Micro-spectrometer payload
CRITICAL DESIGN REVIEW
 STUDENTS SPACE ASSOCIATION THE FACULTY OF POWER AND AERONAUTICAL ENGINEERING WARSAW UNIVERSITY OF TECHNOLOGY CRITICAL DESIGN REVIEW November 2016 Issue no. 1 Changes Date Changes Pages/Section Responsible
STUDENTS SPACE ASSOCIATION THE FACULTY OF POWER AND AERONAUTICAL ENGINEERING WARSAW UNIVERSITY OF TECHNOLOGY CRITICAL DESIGN REVIEW November 2016 Issue no. 1 Changes Date Changes Pages/Section Responsible
Proba-V QWG#7 Flight & GS status. 3 4 May 2018 ACRI, Sophia-Antipolis
 Proba-V QWG#7 Flight & GS status 3 4 May 2018 ACRI, Sophia-Antipolis Orbit status Slide 2 Orbit status LTDN evolution: 7 May 2013: 10:44:30 1 Dec. 2014: 10:51:08 26 Apr. 2017: 10:36:26 Oct 2017: 10:30
Proba-V QWG#7 Flight & GS status 3 4 May 2018 ACRI, Sophia-Antipolis Orbit status Slide 2 Orbit status LTDN evolution: 7 May 2013: 10:44:30 1 Dec. 2014: 10:51:08 26 Apr. 2017: 10:36:26 Oct 2017: 10:30
OrigamiSat-1. FM Down Link Data Format. (English version)
") OrigamiSat-1 FM Down Link Data Format (English version) Document# OP-S1-0115 Revision Ver. 1.3 Date 2019/01/11, revised on 2019/01/13 Name Tokyo Tech OrigamiSat-1 project team Revision history Date Version
OrigamiSat-1 FM Down Link Data Format (English version) Document# OP-S1-0115 Revision Ver. 1.3 Date 2019/01/11, revised on 2019/01/13 Name Tokyo Tech OrigamiSat-1 project team Revision history Date Version
Tracking of - IKAROS -
 Tracking of - IKAROS - First Solar Power Sail Demonstration F5PL measurements F5PL / F1EHN report Last update : 18/06/2010 About IKAROS Interplanetary Kite-craft Accelerated by Radiation Of the Sun Mission
Tracking of - IKAROS - First Solar Power Sail Demonstration F5PL measurements F5PL / F1EHN report Last update : 18/06/2010 About IKAROS Interplanetary Kite-craft Accelerated by Radiation Of the Sun Mission
ADCS. Electron Losses and Fields Investigation. Mission PDR Attitude Determination and Control. Oliver Wang. Los Angeles, California
 ADCS Electron Losses and Fields Investigation Mission PDR Attitude Determination and Control Oliver Wang Los Angeles, California ADCS-1 MPDR, 2/12/2015 Team Organization Subsystem Requirement Overview
ADCS Electron Losses and Fields Investigation Mission PDR Attitude Determination and Control Oliver Wang Los Angeles, California ADCS-1 MPDR, 2/12/2015 Team Organization Subsystem Requirement Overview
debris manoeuvre by photon pressure
 Satellite target for demonstration of space debris manoeuvre by photon pressure Benjamin Sheard EOS Space Systems Pty. Ltd. / Space Environment Research Centre Space Environment Research Centre (SERC):
Satellite target for demonstration of space debris manoeuvre by photon pressure Benjamin Sheard EOS Space Systems Pty. Ltd. / Space Environment Research Centre Space Environment Research Centre (SERC):
IT-SPINS Ionospheric Imaging Mission
 IT-SPINS Ionospheric Imaging Mission Rick Doe, SRI Gary Bust, Romina Nikoukar, APL Dave Klumpar, Kevin Zack, Matt Handley, MSU 14 th Annual CubeSat Dveloper s Workshop 26 April 2017 IT-SPINS Ionosphere-Thermosphere
IT-SPINS Ionospheric Imaging Mission Rick Doe, SRI Gary Bust, Romina Nikoukar, APL Dave Klumpar, Kevin Zack, Matt Handley, MSU 14 th Annual CubeSat Dveloper s Workshop 26 April 2017 IT-SPINS Ionosphere-Thermosphere
University of Kentucky Space Systems Laboratory. Jason Rexroat Space Systems Laboratory University of Kentucky
 University of Kentucky Space Systems Laboratory Jason Rexroat Space Systems Laboratory University of Kentucky September 15, 2012 Missions Overview CubeSat Capabilities Suborbital CubeSats ISS CubeSat-sized
University of Kentucky Space Systems Laboratory Jason Rexroat Space Systems Laboratory University of Kentucky September 15, 2012 Missions Overview CubeSat Capabilities Suborbital CubeSats ISS CubeSat-sized
Design and Navigation Control of an Advanced Level CANSAT. Mansur ÇELEBİ Aeronautics and Space Technologies Institute Turkish Air Force Academy
 Design and Navigation Control of an Advanced Level CANSAT Mansur ÇELEBİ Aeronautics and Space Technologies Institute Turkish Air Force Academy 1 Introduction Content Advanced Level CanSat Design Airframe
Design and Navigation Control of an Advanced Level CANSAT Mansur ÇELEBİ Aeronautics and Space Technologies Institute Turkish Air Force Academy 1 Introduction Content Advanced Level CanSat Design Airframe
Low-Cost Simulation and Verification Environment for Micro-Satellites
 Trans. JSASS Aerospace Tech. Japan Vol. 14, No. ists30, pp. Pf_83-Pf_88, 2016 Low-Cost Simulation and Verification Environment for Micro-Satellites By Toshinori KUWAHARA, Kazufumi FUKUDA, Nobuo SUGIMURA,
Trans. JSASS Aerospace Tech. Japan Vol. 14, No. ists30, pp. Pf_83-Pf_88, 2016 Low-Cost Simulation and Verification Environment for Micro-Satellites By Toshinori KUWAHARA, Kazufumi FUKUDA, Nobuo SUGIMURA,
Primary POC: Prof. Hyochoong Bang Organization: Korea Advanced Institute of Science and Technology KAIST POC
 Title: Demonstration of Optical Stellar Interferometry with Near Earth Objects (NEO) using Laser Range Finder by a Nano Satellite Constellation: A Cost effective approach. Primary POC: Prof. Hyochoong
Title: Demonstration of Optical Stellar Interferometry with Near Earth Objects (NEO) using Laser Range Finder by a Nano Satellite Constellation: A Cost effective approach. Primary POC: Prof. Hyochoong
The Nemo Bus: A Third Generation Nanosatellite Bus for Earth Monitoring and Observation
 The Nemo Bus: A Third Generation Nanosatellite Bus for Earth Monitoring and Observation FREDDY M. PRANAJAYA Manager, Advanced Systems Group S P A C E F L I G H T L A B O R A T O R Y University of Toronto
The Nemo Bus: A Third Generation Nanosatellite Bus for Earth Monitoring and Observation FREDDY M. PRANAJAYA Manager, Advanced Systems Group S P A C E F L I G H T L A B O R A T O R Y University of Toronto
3.0 Payload Sensors Subsystem
 3.0 Payload Sensors Subsystem If the C&DH subsystem is the brain of the CubeSat, then the Payload Sensors Subsystem is the eyes and nose of the CubeSat. The payload sensors subsystem consists of several
3.0 Payload Sensors Subsystem If the C&DH subsystem is the brain of the CubeSat, then the Payload Sensors Subsystem is the eyes and nose of the CubeSat. The payload sensors subsystem consists of several
ARMADILLO: Subsystem Booklet
 ARMADILLO: Subsystem Booklet Mission Overview The ARMADILLO mission is the Air Force Research Laboratory s University Nanosatellite Program s 7 th winner. ARMADILLO is a 3U cube satellite (cubesat) constructed
ARMADILLO: Subsystem Booklet Mission Overview The ARMADILLO mission is the Air Force Research Laboratory s University Nanosatellite Program s 7 th winner. ARMADILLO is a 3U cube satellite (cubesat) constructed
AMSAT Fox Satellite Program
 AMSAT Space Symposium 2012 AMSAT Fox Satellite Program Tony Monteiro, AA2TX Topics Background Fox Launch Strategy Overview of Fox-1 Satellite 2 Background AO-51 was the most popular ham satellite Could
AMSAT Space Symposium 2012 AMSAT Fox Satellite Program Tony Monteiro, AA2TX Topics Background Fox Launch Strategy Overview of Fox-1 Satellite 2 Background AO-51 was the most popular ham satellite Could
Microsatellite Constellation for Earth Observation in the Thermal Infrared Region
 Microsatellite Constellation for Earth Observation in the Thermal Infrared Region Federico Bacci di Capaci Nicola Melega, Alessandro Tambini, Valentino Fabbri, Davide Cinarelli Observation Index 1. Introduction
Microsatellite Constellation for Earth Observation in the Thermal Infrared Region Federico Bacci di Capaci Nicola Melega, Alessandro Tambini, Valentino Fabbri, Davide Cinarelli Observation Index 1. Introduction
Satellite Engineering BEST Course. CubeSats at ULg
 Satellite Engineering BEST Course CubeSats at ULg Nanosatellite Projects at ULg Primary goal Hands-on satellite experience for students 2 Nanosatellite Projects at ULg Primary goal Hands-on satellite experience
Satellite Engineering BEST Course CubeSats at ULg Nanosatellite Projects at ULg Primary goal Hands-on satellite experience for students 2 Nanosatellite Projects at ULg Primary goal Hands-on satellite experience
FPGA Implementation of Safe Mode Detection and Sun Acquisition Logic in a Satellite
 FPGA Implementation of Safe Mode Detection and Sun Acquisition Logic in a Satellite Dhanyashree T S 1, Mrs. Sangeetha B G, Mrs. Gayatri Malhotra 1 Post-graduate Student at RNSIT Bangalore India, dhanz1ec@gmail.com,
FPGA Implementation of Safe Mode Detection and Sun Acquisition Logic in a Satellite Dhanyashree T S 1, Mrs. Sangeetha B G, Mrs. Gayatri Malhotra 1 Post-graduate Student at RNSIT Bangalore India, dhanz1ec@gmail.com,
CAHIER DES CLAUSES TECHNIQUES PARTICULIÈRES PUMA N Objet du marché : SUPPLY OF CUBESAT COMPONENTS FOURNITURE DE COMPOSANTS CUBESAT
 CAHIER DES CLAUSES TECHNIQUES PARTICULIÈRES PUMA N 48073 Objet du marché : SUPPLY OF CUBESAT COMPONENTS FOURNITURE DE COMPOSANTS CUBESAT Renseignements techniques : Sylvestre Lacour, Responsable scientifique
CAHIER DES CLAUSES TECHNIQUES PARTICULIÈRES PUMA N 48073 Objet du marché : SUPPLY OF CUBESAT COMPONENTS FOURNITURE DE COMPOSANTS CUBESAT Renseignements techniques : Sylvestre Lacour, Responsable scientifique
In the summer of 2002, Sub-Orbital Technologies developed a low-altitude
 1.0 Introduction In the summer of 2002, Sub-Orbital Technologies developed a low-altitude CanSat satellite at The University of Texas at Austin. At the end of the project, team members came to the conclusion
1.0 Introduction In the summer of 2002, Sub-Orbital Technologies developed a low-altitude CanSat satellite at The University of Texas at Austin. At the end of the project, team members came to the conclusion
LABsat Manual Fall 2005
 LABsat Manual Fall 2005 This manual describes the USNA Laboratory Satellite System which has been designed to provide a realistic combination of all the aspects of satellite design including the Electrical
LABsat Manual Fall 2005 This manual describes the USNA Laboratory Satellite System which has been designed to provide a realistic combination of all the aspects of satellite design including the Electrical
MISSION TIMELINE AND MODES OF THE LEONIDAS SATELLITE
 MISSION TIMELINE AND MODES OF THE LEONIDAS SATELLITE Zachary Lee-Ho Department of Mechanical Engineering University of Hawai i at Mānoa Honolulu, HI 96822 ABSTRACT In the previous semester we derived system
MISSION TIMELINE AND MODES OF THE LEONIDAS SATELLITE Zachary Lee-Ho Department of Mechanical Engineering University of Hawai i at Mānoa Honolulu, HI 96822 ABSTRACT In the previous semester we derived system
UKube-1 Platform Design. Craig Clark
 UKube-1 Platform Design Craig Clark Ukube-1 Background Ukube-1 is the first mission of the newly formed UK Space Agency The UK Space Agency gave us 5 core mission objectives: 1. Demonstrate new UK space
UKube-1 Platform Design Craig Clark Ukube-1 Background Ukube-1 is the first mission of the newly formed UK Space Agency The UK Space Agency gave us 5 core mission objectives: 1. Demonstrate new UK space
SYSTEMS INTEGRATION AND STABILIZATION OF A CUBESAT
 SYSTEMS INTEGRATION AND STABILIZATION OF A CUBESAT Tyson Kikugawa Department of Electrical Engineering University of Hawai i at Manoa Honolulu, HI 96822 ABSTRACT A CubeSat is a fully functioning satellite,
SYSTEMS INTEGRATION AND STABILIZATION OF A CUBESAT Tyson Kikugawa Department of Electrical Engineering University of Hawai i at Manoa Honolulu, HI 96822 ABSTRACT A CubeSat is a fully functioning satellite,
3-Axis Attitude Determination and Control of the AeroCube-4 CubeSats
 3-Axis Attitude Determination and Control of the AeroCube-4 CubeSats Darren Rowen Rick Dolphus The Aerospace Corporation Vehicle Systems Division 10 August 2013 The Aerospace Corporation 2013 Topics AeroCube
3-Axis Attitude Determination and Control of the AeroCube-4 CubeSats Darren Rowen Rick Dolphus The Aerospace Corporation Vehicle Systems Division 10 August 2013 The Aerospace Corporation 2013 Topics AeroCube
A CubeSat Constellation to Investigate the Atmospheric Drag Environment
 A CubeSat Constellation to Investigate the Atmospheric Drag Environment Eric K. Sutton, Chin S. Lin, Frank A. Marcos, David Voss Air Force Research Laboratory Kirtland AFB, NM; (505) 846-7846 eric.sutton@kirtland.af.mil
A CubeSat Constellation to Investigate the Atmospheric Drag Environment Eric K. Sutton, Chin S. Lin, Frank A. Marcos, David Voss Air Force Research Laboratory Kirtland AFB, NM; (505) 846-7846 eric.sutton@kirtland.af.mil
From Single to Formation Flying CubeSats: An Update of the Delfi Programme
 From Single to Formation Flying CubeSats: An Update of the Delfi Programme Jian Guo, Jasper Bouwmeester & Eberhard Gill 1 Outline Introduction Delfi-C 3 Mission Delfi-n3Xt Mission Lessons Learned DelFFi
From Single to Formation Flying CubeSats: An Update of the Delfi Programme Jian Guo, Jasper Bouwmeester & Eberhard Gill 1 Outline Introduction Delfi-C 3 Mission Delfi-n3Xt Mission Lessons Learned DelFFi
Outernet: Development of a 1U Platform to Enable Low Cost Global Data Provision
 Outernet: Development of a 1U Platform to Enable Low Cost Global Data Provision Introduction One of the UK s leading space companies, and the only wholly UK-owned Prime contractor. ISO 9001:2008 accredited
Outernet: Development of a 1U Platform to Enable Low Cost Global Data Provision Introduction One of the UK s leading space companies, and the only wholly UK-owned Prime contractor. ISO 9001:2008 accredited
TEMPO Apr-09 TEMPO 3 The Mars Society
 TEMPO 3 1 2 TEMPO 3 First step to the Fourth Planet Overview Humans to Mars Humans in Space Artificial Gravity Tethers TEMPO 3 3 Humans to Mars How? Not one huge ship W. von Braun Send return craft first
TEMPO 3 1 2 TEMPO 3 First step to the Fourth Planet Overview Humans to Mars Humans in Space Artificial Gravity Tethers TEMPO 3 3 Humans to Mars How? Not one huge ship W. von Braun Send return craft first
Brazilian Inter-University CubeSat Mission Overview
 Brazilian Inter-University CubeSat Mission Overview Victor Menegon, Leonardo Kessler Slongo, Lui Pillmann, Julian Lopez, William Jamir, Thiago Pereira, Eduardo Bezerra and Djones Lettnin. victormenegon.eel@gmail.com
Brazilian Inter-University CubeSat Mission Overview Victor Menegon, Leonardo Kessler Slongo, Lui Pillmann, Julian Lopez, William Jamir, Thiago Pereira, Eduardo Bezerra and Djones Lettnin. victormenegon.eel@gmail.com
Chapter 2 Satellite Configuration Design
 Chapter 2 Satellite Configuration Design Abstract This chapter discusses the process of integration of the subsystem components and development of the satellite configuration to achieve a final layout
Chapter 2 Satellite Configuration Design Abstract This chapter discusses the process of integration of the subsystem components and development of the satellite configuration to achieve a final layout
Copyright 2012, The Aerospace Corporation, All rights reserved
 The Aerospace Corporation 2012 1 / 22 Aerospace PICOSAT Program Value 2 / 22 Perform Missions - two types: High risk for maximum return Use latest technology Create capability roadmap Risk reduction for
The Aerospace Corporation 2012 1 / 22 Aerospace PICOSAT Program Value 2 / 22 Perform Missions - two types: High risk for maximum return Use latest technology Create capability roadmap Risk reduction for
Design of the Local Ionospheric. ospheric Measurements Satellite
 Design of the Local Ionospheric ospheric Valérie F. Mistoco, Robert D. Siegel, Brendan S. Surrusco, and Erika Mendoza Communications and Space Sciences Laboratory Electrical Engineering Department Aerospace
Design of the Local Ionospheric ospheric Valérie F. Mistoco, Robert D. Siegel, Brendan S. Surrusco, and Erika Mendoza Communications and Space Sciences Laboratory Electrical Engineering Department Aerospace
TELEMETRY, TRACKING, COMMAND AND MONITORING SYSTEM IN GEOSTATIONARY SATELLITE
 TELEMETRY, TRACKING, COMMAND AND MONITORING SYSTEM IN GEOSTATIONARY SATELLITE Alish 1, Ritambhara Pandey 2 1, 2 UG, Department of Electronics and Communication Engineering, Raj Kumar Goel Institute of
TELEMETRY, TRACKING, COMMAND AND MONITORING SYSTEM IN GEOSTATIONARY SATELLITE Alish 1, Ritambhara Pandey 2 1, 2 UG, Department of Electronics and Communication Engineering, Raj Kumar Goel Institute of
AubieSat-1. Distribution Statement: Approved for public release; distribution is unlimited.
 AubieSat-1 Distribution Statement: Approved for public release; distribution is unlimited. AubieSat-I Mission Workforce Development: Students develop leadership, technical, team working, and management
AubieSat-1 Distribution Statement: Approved for public release; distribution is unlimited. AubieSat-I Mission Workforce Development: Students develop leadership, technical, team working, and management
GPS System Design and Control Modeling. Chua Shyan Jin, Ronald. Assoc. Prof Gerard Leng. Aeronautical Engineering Group, NUS
 GPS System Design and Control Modeling Chua Shyan Jin, Ronald Assoc. Prof Gerard Leng Aeronautical Engineering Group, NUS Abstract A GPS system for the autonomous navigation and surveillance of an airship
GPS System Design and Control Modeling Chua Shyan Jin, Ronald Assoc. Prof Gerard Leng Aeronautical Engineering Group, NUS Abstract A GPS system for the autonomous navigation and surveillance of an airship
JAXA s small satellite program provides timely and low cost demonstration opportunities for advanced space missions and technologies.
 JAXA s small satellite program provides timely and low cost demonstration opportunities for advanced space missions and technologies. Components in this brochure are developed for and adopted in the small
JAXA s small satellite program provides timely and low cost demonstration opportunities for advanced space missions and technologies. Components in this brochure are developed for and adopted in the small
Aaron J. Dando Principle Supervisor: Werner Enderle
 Aaron J. Dando Principle Supervisor: Werner Enderle Australian Cooperative Research Centre for Satellite Systems (CRCSS) at the Queensland University of Technology (QUT) Aaron Dando, CRCSS/QUT, 19 th AIAA/USU
Aaron J. Dando Principle Supervisor: Werner Enderle Australian Cooperative Research Centre for Satellite Systems (CRCSS) at the Queensland University of Technology (QUT) Aaron Dando, CRCSS/QUT, 19 th AIAA/USU
RADIOMETRIC TRACKING. Space Navigation
 RADIOMETRIC TRACKING Space Navigation Space Navigation Elements SC orbit determination Knowledge and prediction of SC position & velocity SC flight path control Firing the attitude control thrusters to
RADIOMETRIC TRACKING Space Navigation Space Navigation Elements SC orbit determination Knowledge and prediction of SC position & velocity SC flight path control Firing the attitude control thrusters to
HASP Payload Specification and Integration Plan
 Payload Title: High Altitude Tracking Solar Survey (HATS 2.0) Payload Class: Small Large (circle one) Payload ID: 09 Institution: Contact Name: Arizona State University Elizabeth Dyer Contact Phone: 6025702298
Payload Title: High Altitude Tracking Solar Survey (HATS 2.0) Payload Class: Small Large (circle one) Payload ID: 09 Institution: Contact Name: Arizona State University Elizabeth Dyer Contact Phone: 6025702298
Phone: , Fax: , Germany
 The TET-1 Satellite Bus A High Reliability Bus for Earth Observation, Scientific and Technology Verification Missions in LEO Pestana Conference Centre Funchal, Madeira - Portugal 31 May 4 June 2010 S.
The TET-1 Satellite Bus A High Reliability Bus for Earth Observation, Scientific and Technology Verification Missions in LEO Pestana Conference Centre Funchal, Madeira - Portugal 31 May 4 June 2010 S.
Open Source Design: Corvus-BC Spacecraft. Brian Cooper, Kyle Leveque 9 August 2015
 Open Source Design: Corvus-BC Spacecraft Brian Cooper, Kyle Leveque 9 August 2015 Introduction Corvus-BC 6U overview Subsystems to be open sourced Current development status Open sourced items Future Rollout
Open Source Design: Corvus-BC Spacecraft Brian Cooper, Kyle Leveque 9 August 2015 Introduction Corvus-BC 6U overview Subsystems to be open sourced Current development status Open sourced items Future Rollout
RADIOMETRIC TRACKING. Space Navigation
 RADIOMETRIC TRACKING Space Navigation October 24, 2016 D. Kanipe Space Navigation Elements SC orbit determination Knowledge and prediction of SC position & velocity SC flight path control Firing the attitude
RADIOMETRIC TRACKING Space Navigation October 24, 2016 D. Kanipe Space Navigation Elements SC orbit determination Knowledge and prediction of SC position & velocity SC flight path control Firing the attitude
Citrus Circuits Fall Workshop Series. Roborio and Sensors. Paul Ngo and Ellie Hass
 Citrus Circuits Fall Workshop Series Roborio and Sensors Paul Ngo and Ellie Hass Introduction to Sensors Sensor: a device that detects or measures a physical property and records, indicates, or otherwise
Citrus Circuits Fall Workshop Series Roborio and Sensors Paul Ngo and Ellie Hass Introduction to Sensors Sensor: a device that detects or measures a physical property and records, indicates, or otherwise
Department of ECE, SAL Institute of Technology And Engineering Research, GTU, Gujarat, India
 Volume 3, Issue 10, October 2013 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com A Review on
Volume 3, Issue 10, October 2013 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com A Review on
AVSS Project. ENAE483 Fall 2012
 AVSS Project ENAE483 Fall 2012 Team D9: Jason Burr Vera Klimchenko Grant McLaughlin Johnathan Pino Link Budget Analysis Maximum Earth-Moon Transmission Distance R M D R M R e Moon 406,700 km Earth Ku Band
AVSS Project ENAE483 Fall 2012 Team D9: Jason Burr Vera Klimchenko Grant McLaughlin Johnathan Pino Link Budget Analysis Maximum Earth-Moon Transmission Distance R M D R M R e Moon 406,700 km Earth Ku Band
Drag and Atmospheric Neutral Density Explorer
 Drag and Atmospheric Neutral Density Explorer Winner of University Nanosat V Competition Engineering Challenges of Designing a Spherical Spacecraft Colorado Undergraduate Space Research Symposium April
Drag and Atmospheric Neutral Density Explorer Winner of University Nanosat V Competition Engineering Challenges of Designing a Spherical Spacecraft Colorado Undergraduate Space Research Symposium April
10/21/2009. d R. d L. r L d B L08. POSE ESTIMATION, MOTORS. EECS 498-6: Autonomous Robotics Laboratory. Midterm 1. Mean: 53.9/67 Stddev: 7.
 1 d R d L L08. POSE ESTIMATION, MOTORS EECS 498-6: Autonomous Robotics Laboratory r L d B Midterm 1 2 Mean: 53.9/67 Stddev: 7.73 1 Today 3 Position Estimation Odometry IMUs GPS Motor Modelling Kinematics:
1 d R d L L08. POSE ESTIMATION, MOTORS EECS 498-6: Autonomous Robotics Laboratory r L d B Midterm 1 2 Mean: 53.9/67 Stddev: 7.73 1 Today 3 Position Estimation Odometry IMUs GPS Motor Modelling Kinematics:
Proximity Operations Nano-Satellite Flight Demonstration (PONSFD) Overview
 Overview") Proximity Operations Nano-Satellite Flight Demonstration (PONSFD) Overview April 25 th, 2013 Scott MacGillivray, President Tyvak Nano-Satellite Systems LLC 15265 Alton Parkway, Suite 200 Irvine, CA 92618-2606
Proximity Operations Nano-Satellite Flight Demonstration (PONSFD) Overview April 25 th, 2013 Scott MacGillivray, President Tyvak Nano-Satellite Systems LLC 15265 Alton Parkway, Suite 200 Irvine, CA 92618-2606
Flight Results from the nsight-1 QB50 CubeSat Mission
 Flight Results from the nsight-1 QB50 CubeSat Mission lvisagie@sun.ac.za Dr. Lourens Visagie Prof. Herman Steyn Stellenbosch University Hendrik Burger Dr. Francois Malan SCS-Space 4 th IAA Conference on
Flight Results from the nsight-1 QB50 CubeSat Mission lvisagie@sun.ac.za Dr. Lourens Visagie Prof. Herman Steyn Stellenbosch University Hendrik Burger Dr. Francois Malan SCS-Space 4 th IAA Conference on
First Results From the GPS Compact Total Electron Content Sensor (CTECS) on the PSSCT-2 Nanosat
 on the PSSCT-2 Nanosat") First Results From the GPS Compact Total Electron Content Sensor (CTECS) on the PSSCT-2 Nanosat Rebecca Bishop 1, David Hinkley 1, Daniel Stoffel 1, David Ping 1, Paul Straus 1, Timothy Burbaker 2 1 The
First Results From the GPS Compact Total Electron Content Sensor (CTECS) on the PSSCT-2 Nanosat Rebecca Bishop 1, David Hinkley 1, Daniel Stoffel 1, David Ping 1, Paul Straus 1, Timothy Burbaker 2 1 The
SPASIM: A SPACECRAFT SIMULATOR
 SPASIM: A SPACECRAFT SIMULATOR Carlos A. Liceaga NASA Langley Research Center 8 Langley Blvd., M/S 328 Hampton, VA 23681-0001 c.a.liceaga@larc.nasa.gov ABSTRACT The SPAcecraft SIMulator (SPASIM) simulates
SPASIM: A SPACECRAFT SIMULATOR Carlos A. Liceaga NASA Langley Research Center 8 Langley Blvd., M/S 328 Hampton, VA 23681-0001 c.a.liceaga@larc.nasa.gov ABSTRACT The SPAcecraft SIMulator (SPASIM) simulates
Electric Solar Wind Sail tether payloads onboard CubeSats
 Electric Solar Wind Sail tether payloads onboard CubeSats Jouni Envall, Petri Toivanen, Pekka Janhunen Finnish Meteorological Institute, Helsinki, Finland (jouni.envall@fmi.fi) Outline E-sail & Coulomb
Electric Solar Wind Sail tether payloads onboard CubeSats Jouni Envall, Petri Toivanen, Pekka Janhunen Finnish Meteorological Institute, Helsinki, Finland (jouni.envall@fmi.fi) Outline E-sail & Coulomb
A Generic Simulink Model Template for Simulation of Small Satellites
 A Generic Simulink Model Template for Simulation of Small Satellites Axel Berres (1), Marco Berlin (1), Andreas Kotz (2), Holger Schumann (3), Thomas Terzibaschian (2), Andreas Gerndt (3) (1) German Aerospace
A Generic Simulink Model Template for Simulation of Small Satellites Axel Berres (1), Marco Berlin (1), Andreas Kotz (2), Holger Schumann (3), Thomas Terzibaschian (2), Andreas Gerndt (3) (1) German Aerospace
FlexCore: Low-Cost Attitude Determination and Control Enabling High-Performance Small Spacecraft
 SSC16-X-7 FlexCore: Low-Cost Attitude Determination and Control Enabling High-Performance Small Spacecraft Daniel Hegel Blue Canyon Technologies 2425 55 th St. Suite A-200, Boulder, CO, 80301; 720 458-0703
SSC16-X-7 FlexCore: Low-Cost Attitude Determination and Control Enabling High-Performance Small Spacecraft Daniel Hegel Blue Canyon Technologies 2425 55 th St. Suite A-200, Boulder, CO, 80301; 720 458-0703
WHAT IS A CUBESAT? DragonSat-1 (1U CubeSat)
") 1 WHAT IS A CUBESAT? Miniaturized satellites classified according to height (10-30 cm) Purpose is to perform small spacecraft experiments. Use has increased due to relatively low cost DragonSat-1 (1U CubeSat)
1 WHAT IS A CUBESAT? Miniaturized satellites classified according to height (10-30 cm) Purpose is to perform small spacecraft experiments. Use has increased due to relatively low cost DragonSat-1 (1U CubeSat)
SMART COMMUNICATION SATELLITE (SCS) PROJECT OVERVIEW. Jin JIN Space Center, Tsinghua University 2015/8/10
 PROJECT OVERVIEW. Jin JIN Space Center, Tsinghua University 2015/8/10") SMART COMMUNICATION SATELLITE (SCS) PROJECT OVERVIEW Jin JIN Space Center, Tsinghua University 2015/8/10 OUTLINE Overview System Scheme Technical Challenges Flight Results Future 2 1 Overview Tsinghua
SMART COMMUNICATION SATELLITE (SCS) PROJECT OVERVIEW Jin JIN Space Center, Tsinghua University 2015/8/10 OUTLINE Overview System Scheme Technical Challenges Flight Results Future 2 1 Overview Tsinghua
There Is two main way to correct the attitude using the magnetic field: Passive or active attitude correction.
 ADCS Actuator sizing There is different way to stabilize a satellite. Some of them use Thruster to do it. For us it is prohibited (it is the rule for CubeSat s). Reaction wheels are also an option but
ADCS Actuator sizing There is different way to stabilize a satellite. Some of them use Thruster to do it. For us it is prohibited (it is the rule for CubeSat s). Reaction wheels are also an option but
Project Name: Tail-Gator
 EEL 4924 Electrical Engineering Design (Senior Design) Final Report 22 April 2013 Project Name: Tail-Gator Team Name: Eye in the Sky Team Members: Name: Anthony Incardona Name: Fredrik Womack Page 2/14
EEL 4924 Electrical Engineering Design (Senior Design) Final Report 22 April 2013 Project Name: Tail-Gator Team Name: Eye in the Sky Team Members: Name: Anthony Incardona Name: Fredrik Womack Page 2/14
USUSat III - TOROID. TOmographic Remote Observer of Ionospheric Disturbances
 USUSat III - TOROID TOmographic Remote Observer of Ionospheric Disturbances Matthew D. Carney Systems Engineer Center for Space Engineering Industry Day February 28, 2006 Logan, UT Outline Mission Overview
USUSat III - TOROID TOmographic Remote Observer of Ionospheric Disturbances Matthew D. Carney Systems Engineer Center for Space Engineering Industry Day February 28, 2006 Logan, UT Outline Mission Overview
Brian Hanna Meteor IP 2007 Microcontroller
 MSP430 Overview: The purpose of the microcontroller is to execute a series of commands in a loop while waiting for commands from ground control to do otherwise. While it has not received a command it populates
MSP430 Overview: The purpose of the microcontroller is to execute a series of commands in a loop while waiting for commands from ground control to do otherwise. While it has not received a command it populates
Satellite Fleet Operations Using a Global Ground Station Network. Naomi Kurahara Infostellar
 Satellite Fleet Operations Using a Global Ground Station Network Naomi Kurahara Infostellar 1 Japanese university satellites Image via University Space Engineering Consortium, http://unisec.jp/wp/wp-content/uploads/2016/06/unisec_satellites_160120_jp_s.jpg
Satellite Fleet Operations Using a Global Ground Station Network Naomi Kurahara Infostellar 1 Japanese university satellites Image via University Space Engineering Consortium, http://unisec.jp/wp/wp-content/uploads/2016/06/unisec_satellites_160120_jp_s.jpg
I SARA 08/10/13. Pre-Decisional Information -- For Planning and Discussion Purposes Only
 1 Overview ISARA Mission Summary Payload Description Experimental Design ISARA Mission Objectives: Demonstrate a practical, low cost Ka-band High Gain Antenna (HGA) on a 3U CubeSat Increase downlink data
1 Overview ISARA Mission Summary Payload Description Experimental Design ISARA Mission Objectives: Demonstrate a practical, low cost Ka-band High Gain Antenna (HGA) on a 3U CubeSat Increase downlink data