Rocking Drones with Intentional Sound Noise on Gyroscopic Sensors
|
|
|
- Darcy Rogers
- 5 years ago
- Views:
Transcription


1 USENIX Security Symposium 2015 Rocking Drones with Intentional Sound Noise on Gyroscopic Sensors Yunmok Son, Hocheol Shin, Dongkwan Kim, Youngseok Park, Juhwan Noh, Kibum Choi, Jungwoo Choi, and Yongdae Kim Electrical Engineering at KAIST System Security Lab.




2 Drones (Multi-coptors) Distribution delivery Search and rescue Aerial photography Private hobby 2
3 Drone, A New Threat Air terrorism using a weaponized drone 3
4 Drone, A New Threat Air terrorism using a weaponized drone Jul
5 Drone, A New Threat Air terrorism using a weaponized drone Jul May
6 Drone, A New Threat Air terrorism using a weaponized drone Jul May Apr

7 Drone, A New Threat Air terrorism using a weaponized drone Jul May Apr Sep
8 Attack Vectors of Drone Drone 4
9 Attack Vectors of Drone High Power Laser Bumper Drone Drone Capturing Drone with Net Physical attack Drone Shot-gun 4
10 Attack Vectors of Drone High Power Laser Bumper Drone RF jamming or spoofing Comm. channel Drone Capturing Drone with Net Physical attack Drone Shot-gun 4
11 Attack Vectors of Drone High Power Laser Bumper Drone RF jamming or spoofing Comm. channel Software hacking Drone Hacking Drone ( Skyjack ) Drone Capturing Drone with Net Physical attack Drone Shot-gun 4
12 Attack Vectors of Drone High Power Laser Bumper Drone RF jamming or spoofing Comm. channel Software hacking Drone Hacking Drone ( Skyjack ) Drone Capturing Drone with Net Physical attack Drone Positioning Shot-gun GPS Jamming or Spoofing 4
13 Attack Vectors of Drone High Power Laser Bumper Drone RF jamming or spoofing Comm. channel Software hacking Drone Hacking Drone ( Skyjack ) Drone Capturing Drone with Net Physical attack Drone Positioning Shot-gun Sensing channel GPS Jamming or Spoofing 4

 Drone Capturing Drone with Net Drone How")

14 Attack Vectors of Drone High Power Laser Bumper Drone RF jamming or spoofing Comm. channel Software hacking Drone Hacking Drone ( Skyjack ) Drone Capturing Drone with Net Drone How Physical secure is drone against Positioning attack interference on sensing channel? Shot-gun Sensing channel GPS Jamming or Spoofing 4
15 Drone System Wireless Transmitter RF Wireless Receiver User Controller Flight Controller Rotors (with speed controllers) 6
16 Drone System Wireless Transmitter RF Wireless Receiver User Controller Flight Controller Rotors (with speed controllers) 6
17 Drone System Wireless Transmitter RF Wireless Receiver Input User Controller Flight Controller Rotors (with speed controllers) 6
18 Drone System Wireless Transmitter RF Wireless Receiver Input User Controller Flight Controller Rotors (with speed controllers) Output 6








19 Drone System * IMU: Inertial Measurement Unit Wireless Transmitter RF Input Wireless Receiver Input IMU Sensors (Gyroscope, etc. User Controller Flight Controller Rotors (with speed controllers) Output 6
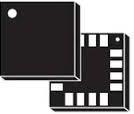
20 Gyroscope on Drone * MEMS: Micro-Electro-Mechanical Systems Inertial Measurement Unit (IMU) A device to measure velocity, orientation, or rotation Using a combination of MEMS gyroscopes and accelerometers 7
21 Gyroscope on Drone * MEMS: Micro-Electro-Mechanical Systems Inertial Measurement Unit (IMU) A device to measure velocity, orientation, or rotation Using a combination of MEMS gyroscopes and accelerometers MEMS gyroscope 7
22 Gyroscope on Drone Inertial Measurement Unit (IMU) A device to measure velocity, orientation, or rotation Using a combination of MEMS gyroscopes and accelerometers * MEMS: Micro-Electro-Mechanical Systems <Conceptual structure of MEMS gyro.> MEMS gyroscope 7
 A device to")




23 Gyroscope on Drone Inertial Measurement Unit (IMU) A device to measure velocity, orientation, or rotation Using a combination of MEMS gyroscopes and accelerometers * MEMS: Micro-Electro-Mechanical Systems <Conceptual structure of MEMS gyro.> MEMS gyroscope 7 (
24 Resonance in MEMS Gyroscope Mechanical resonance by sound noise Known fact in the MEMS community Degrades MEMS Gyro s accuracy With (resonant) frequencies of sound 8
 frequencies of sound MEMS Gyro.")
25 Resonance in MEMS Gyroscope Mechanical resonance by sound noise Known fact in the MEMS community Degrades MEMS Gyro s accuracy With (resonant) frequencies of sound MEMS Gyro. with a high resonant frequency to reduce the sound noise effect (above 20kHz) 8

 Audio")




26 Experiment Setup Up to 48 khz without aliasing Anechoic Chamber Sound Source (Speaker) Audio Amplifier External Soundcard Single Tone Sound Noise 10cm USB Up to 24 khz without aliasing Sound Frequency: every 100 Hz up to 30 khz Gyroscope Read Registers Arduino USB Laptop Python Script 10


27 Sound Pressure Level = 85~95 db (The sound level of noisy factory or heavy truck) Sound source Microphone Gyroscope Arduino

28 12 EA 12 EA 12 EA On the target drones 15 kinds of MEMS gyroscopes 12
29 Experimental Results (1/3) Found the resonant frequencies of 7 MEMS gyroscopes Not found for 8 MEMS gyroscopes Sensor Vender Supporting Axis L3G4200D STMicro. X, Y, Z Resonant freq. in the datasheet (axis) Resonant freq. in our experiment (axis) 7,900 ~ 8,300 Hz (X, Y, Z) L3GD20 STMicro. X, Y, Z No detailed information 19,700 ~ 20,400Hz (X, Y, Z) LSM330 STMicro. X, Y, Z 19,900 ~ 20,000 Hz (X, Y, Z) MPU6000 InvenSense X, Y, Z 30 ~ 36 khz (X) 26,200 ~ 27,400 Hz (Z) MPU6050 InvenSense X, Y, Z 27 ~ 33 khz (Y) 25,800 ~ 27,700 Hz (Z) MPU9150 InvenSense X, Y, Z 24 ~ 30 khz (Z) 27,400 ~ 28,600 Hz (Z) MPU6500 InvenSense X, Y, Z 25 ~ 29 khz (X, Y, Z) 26,500 ~ 27,900 Hz (X, Y, Z) 13
30 Experimental Results (1/3) Found the resonant frequencies of 7 MEMS gyroscopes Not found for 8 MEMS gyroscopes Sensor Vender Supporting Axis L3G4200D STMicro. X, Y, Z Resonant freq. in the datasheet (axis) Resonant freq. in our experiment (axis) 7,900 ~ 8,300 Hz (X, Y, Z) L3GD20 STMicro. X, Y, Z No detailed information 19,700 ~ 20,400Hz (X, Y, Z) LSM330 STMicro. X, Y, Z 19,900 ~ 20,000 Hz (X, Y, Z) MPU6000 InvenSense X, Y, Z 30 ~ 36 khz (X) 26,200 ~ 27,400 Hz (Z) MPU6050 InvenSense X, Y, Z 27 ~ 33 khz (Y) 25,800 ~ 27,700 Hz (Z) MPU9150 InvenSense X, Y, Z 24 ~ 30 khz (Z) 27,400 ~ 28,600 Hz (Z) MPU6500 InvenSense X, Y, Z 25 ~ 29 khz (X, Y, Z) 26,500 ~ 27,900 Hz (X, Y, Z) 13
31 Experimental Results (1/3) Found the resonant frequencies of 7 MEMS gyroscopes Not found for 8 MEMS gyroscopes Sensor Vender Supporting Axis L3G4200D STMicro. X, Y, Z Resonant freq. in the datasheet (axis) Resonant freq. in our experiment (axis) 7,900 ~ 8,300 Hz (X, Y, Z) L3GD20 STMicro. X, Y, Z No detailed information 19,700 ~ 20,400Hz (X, Y, Z) LSM330 STMicro. X, Y, Z 19,900 ~ 20,000 Hz (X, Y, Z) MPU6000 InvenSense X, Y, Z 30 ~ 36 khz (X) 26,200 ~ 27,400 Hz (Z) MPU6050 InvenSense X, Y, Z 27 ~ 33 khz (Y) 25,800 ~ 27,700 Hz (Z) MPU9150 InvenSense X, Y, Z 24 ~ 30 khz (Z) 27,400 ~ 28,600 Hz (Z) MPU6500 InvenSense X, Y, Z 25 ~ 29 khz (X, Y, Z) 26,500 ~ 27,900 Hz (X, Y, Z) 13
32 Experimental Results (2/3) Unexpected output by sound noise (for L3G4200D) Standard deviation of raw data samples for 12 L3G4200D chips (X-axis) Standard deviation of raw data samples for 12 L3G4200D chips (Y-axis) 14
33 Experimental Results (2/3) Unexpected output by sound noise (for L3G4200D) Standard deviation of raw data samples for 12 L3G4200D chips (X-axis) Standard deviation of raw data samples for 12 L3G4200D chips (Y-axis) 7,900 ~ 8,300Hz 14
 Standard deviation of raw data samples for 12")
 7,900 ~")
34 Experimental Results (2/3) Unexpected output by sound noise (for L3G4200D) Standard deviation of raw data samples for 12 L3G4200D chips (X-axis) 7,900 ~ 8,300Hz Standard deviation of raw data samples for 12 L3G4200D chips (Y-axis) 7,900 ~ 8,300Hz 14
35 Experimental Results (3/3) Unexpected output by sound noise (for L3G4200D) Standard deviation of raw data samples for 12 L3G4200D chips (Z-axis) Raw data samples of one L3G4200D chip 8,000Hz) 15
36 Experimental Results (3/3) Unexpected output by sound noise (for L3G4200D) Standard deviation of raw data samples for 12 L3G4200D chips (Z-axis) Raw data samples of one L3G4200D chip 8,000Hz) 7,900 ~ 8,300Hz 15
 Standard deviation of raw data samples for 12 L3G4200D chips")

37 Experimental Results (3/3) Unexpected output by sound noise (for L3G4200D) Standard deviation of raw data samples for 12 L3G4200D chips (Z-axis) Raw data samples of one L3G4200D chip 8,000Hz) 7,900 ~ 8,300Hz What is the impact of abnormal sensor output to the actuation of drone system? 15
38 Software Analysis Two open-source firmware programs Multiwii project ArduPilot project 16
39 Software Analysis Two open-source firmware programs Multiwii project ArduPilot project Rotor control algorithm 16
40 Software Analysis Two open-source firmware programs Multiwii project ArduPilot project Rotor control algorithm Proportional-Integral -Derivative control 16
41 Software Analysis Two open-source firmware programs Multiwii project ArduPilot project Rotor control algorithm Proportional-Integral -Derivative control 16
42 Software Analysis Two open-source firmware programs Multiwii project ArduPilot project Rotor control algorithm Proportional-Integral -Derivative control 16
43 Software Analysis Two open-source firmware programs Multiwii project ArduPilot project Rotor control algorithm Proportional-Integral -Derivative control 16
44 Software Analysis Two open-source firmware programs Multiwii project ArduPilot project Rotor control algorithm Proportional-Integral -Derivative control 16

45 Software Analysis Two open-source firmware programs Multiwii project ArduPilot project Rotor control algorithm Proportional-Integral -Derivative control 16
 Target drone B")



46 Target Drones Target drone A (DIY drone) Target drone B (DIY drone) Gyroscope: L3G4200D Gyroscope: MPU6000 Resonant freq.: 8,200 Hz Firmware: Multiwii (Audible sound range) Resonant freq.: 26,200 Hz Firmware: ArduPilot (Ultra sound range) 18

47 19 Attack DEMO
48 Attack DEMO (Target drone A) Raw data samples of the gyroscope 21
49 Attack DEMO (Target drone A) Input Raw data samples of the gyroscope Flight Controller Output Rotor control data samples 21

50 Attack DEMO (Target drone A) Altitude data samples from sonar Input Raw data samples of the gyroscope Flight Controller Output Rotor control data samples 21
51 Attack Results Result of attacking two target drones Target Drone A Target Drone B Resonant Freq. (Gyro.) 8,200 Hz (L3G4200D) 26,200 Hz (MPU6000) Affected Axes X, Y, Z Z Attack Result Fall down - 22
 8,200 Hz (L3G4200D) 26,200 Hz (MPU6000) Affected Axes X, Y, Z Z Attack Result Fall down - X- and Y-axis = vertical rotation (more critical effect")
52 Attack Results Result of attacking two target drones Target Drone A Target Drone B Resonant Freq. (Gyro.) 8,200 Hz (L3G4200D) 26,200 Hz (MPU6000) Affected Axes X, Y, Z Z Attack Result Fall down - X- and Y-axis = vertical rotation (more critical effect on stability) Z-axis = horizontal orientation 22
53 Attack Distance The minimum sound pressure level in our experiments About db SPL (at 10cm) 24
54 Attack Distance The minimum sound pressure level in our experiments About db SPL (at 10cm) Theoretically, 37.58m using a sound source that can generate 140 db SPL at 1m 24
 Theoretically, 37.")

55 Attack Distance The minimum sound pressure level in our experiments About db SPL (at 10cm) Theoretically, 37.58m using a sound source that can generate 140 db SPL at 1m <450XL of LRAD Corporation> 24 (



56 Attack Scenarios Drone to Drone Attack Sonic Weapons Sonic Wall/Zone 25
57 Limitations (1/2) Aiming at a 3- dimensional moving object 26
58 Limitations (1/2) Aiming at a 3- dimensional moving object Speaker array Audio amp. 26

59 Limitations (1/2) Aiming at a 3- dimensional moving object Speaker array Audio amp. 26

60 Limitations (1/2) Aiming at a 3- dimensional moving object Speaker array Audio amp. Long Range Acoustic Device for police 26


61 Limitations (2/2) No accumulated effect or damage Simple sonic wall (3m-by-2m, 25 speakers) 27
62 28 Countermeasure
63 Countermeasure Physical isolation Shielding from sound Using four materials Paper box Acrylic panel Aluminum plate Foam 28

 28")
64 Countermeasure Physical isolation Shielding from sound Using four materials Paper box Acrylic panel Aluminum plate Foam Standard deviation of raw data samples for one L3G4200D chip (averaged for 10 identical tests) 28
65 Conclusion A case study for a threat caused by sensor input Finding mechanical resonant frequencies from 7 kinds of MEMS gyro. Analyzing the effect of this resonance on the firmware of drones Demonstrating to attack drones using sound noise in the real world Suggesting several attack scenarios and defenses 30
66 Conclusion A case study for a threat caused by sensor input Finding mechanical resonant frequencies from 7 kinds of MEMS gyro. Analyzing the effect of this resonance on the firmware of drones Demonstrating to attack drones using sound noise in the real world Suggesting several attack scenarios and defenses Future work Developing a software based defense (without hardware modifications) Against sensing channel attacks for drones or embedded devices 30
67 Conclusion A case study for a threat caused by sensor input Finding mechanical resonant frequencies from 7 kinds of MEMS gyro. Analyzing the effect of this resonance on the firmware of drones Demonstrating to attack drones using sound noise in the real world Suggesting several attack scenarios and defenses (Not only by natural errors, but also by attackers) Future work Sensor output should not be fully trusted. Developing a software based defense (without hardware modifications) Against sensing channel attacks for drones or embedded devices 30
68 31
69 32 APPENDIXES
70 Sensor Definition To detect physical properties in nature To convert them to quantitative values 33
71 Sensor Definition To detect physical properties in nature To convert them to quantitative values New channel to attack (for attacker) 33



72 Sensor Definition To detect physical properties in nature To convert them to quantitative values New channel to attack (for attacker) Network traffic Software update Sensor reading Sensing & Actuation System 33
73 Attack Vectors of Sensor Three interfaces System (Processor) Sensor Physical quantities 34
74 Attack Vectors of Sensor Three interfaces Sensitive to legitimate (physical) quantities System (Processor) Sensor Legitimate channel Physical quantities 34
75 Attack Vectors of Sensor Three interfaces Sensitive to legitimate (physical) quantities Insensitive to other (physical) quantities System (Processor) Sensor Legitimate channel Nonlegitimate channel Physical quantities 34
76 Attack Vectors of Sensor Three interfaces Sensitive to legitimate (physical) quantities Insensitive to other (physical) quantities Need to send data to the system System (Processor) Sensor Legitimate channel Nonlegitimate channel Physical quantities 34
77 Attack Vectors of Sensor Three interfaces Sensitive to legitimate (physical) quantities Insensitive to other (physical) quantities Need to send data to the system System (Processor) Data/Signal injection Sensor Sensing data injection Legitimate channel Nonlegitimate channel Interference or performance degradation Physical quantities 34
78 Attack Vectors of Sensor Three interfaces Sensitive to legitimate (physical) quantities Insensitive to other (physical) quantities Need to send data to the system System (Processor) Data/Signal injection EMI injection attack for defibrillator and BT headset (S&P 2013) Sensor Sensing data injection Legitimate channel Nonlegitimate channel Interference or performance degradation Physical quantities 34
79 Attack Vectors of Sensor Three interfaces Sensitive to legitimate (physical) quantities Insensitive to other (physical) quantities Need to send data to the system System (Processor) Data/Signal injection EMI injection attack for defibrillator and BT headset (S&P 2013) Sensor Sensing data injection Legitimate channel Nonlegitimate channel Interference or performance degradation Spoofing attack for ABS in a car (CHES 2013) Physical quantities 34
 quantities Need to send data to the system System (Processor) Data/Signal injection EMI injection")
 Our work Physical")
80 Attack Vectors of Sensor Three interfaces Sensitive to legitimate (physical) quantities Insensitive to other (physical) quantities Need to send data to the system System (Processor) Data/Signal injection EMI injection attack for defibrillator and BT headset (S&P 2013) Sensor Sensing data injection Legitimate channel Nonlegitimate channel Interference or performance degradation Spoofing attack for ABS in a car (CHES 2013) Our work Physical quantities 34
 measurement (The sound level of")
 below 2% THD+N Sound Measurement Instrument (NI")
81 Sound Noise Source Sound Pressure Level (SPL) and Total Harmonics Distortion plus Noise (THD+N) measurement (The sound level of noisy factory or heavy truck) 85~95 db SPL Microphone (Brüel & Kjær 4189-A-021) below 2% THD+N Sound Measurement Instrument (NI USB-4431) 35




82 Paper box Acrylic panel Aluminum plate Foam 36
Hacking Sensors. Yongdae Kim
 Hacking Sensors Yongdae Kim SysSec@KAIST Sensor q Sensor = An electrical device To measure physical properties of surrounding environment Passive and active sensors Passive infrared motion sensor magnetometer
Hacking Sensors Yongdae Kim SysSec@KAIST Sensor q Sensor = An electrical device To measure physical properties of surrounding environment Passive and active sensors Passive infrared motion sensor magnetometer
Rocking Drones with Intentional Sound Noise on Gyroscopic Sensors
 Rocking Drones with Intentional Sound Noise on Gyroscopic Sensors Yunmok Son, Hocheol Shin, Dongkwan Kim, Youngseok Park, Juhwan Noh, Kibum Choi, Jungwoo Choi, and Yongdae Kim, Korea Advanced Institute
Rocking Drones with Intentional Sound Noise on Gyroscopic Sensors Yunmok Son, Hocheol Shin, Dongkwan Kim, Youngseok Park, Juhwan Noh, Kibum Choi, Jungwoo Choi, and Yongdae Kim, Korea Advanced Institute
SONIC GUN TO SMART DEVICES YOUR DEVICES LOSE CONTROL UNDER ULTRASOUND/SOUND
 SONIC GUN TO SMART DEVICES YOUR DEVICES LOSE CONTROL UNDER ULTRASOUND/SOUND Authors Wang, Zhengbo & Wang, Kang Alibaba Security Yang, Bo CAICT Li, Shangyuan Tsinghua University Pan, Aimin Alibaba Security
SONIC GUN TO SMART DEVICES YOUR DEVICES LOSE CONTROL UNDER ULTRASOUND/SOUND Authors Wang, Zhengbo & Wang, Kang Alibaba Security Yang, Bo CAICT Li, Shangyuan Tsinghua University Pan, Aimin Alibaba Security
SONIC GUN TO SMART DEVICES YOUR DEVICES LOSE CONTROL UNDER ULTRASOUND/SOUND
 SONIC GUN TO SMART DEVICES YOUR DEVICES LOSE CONTROL UNDER ULTRASOUND/SOUND Authors Wang, Zhengbo & Wang, Kang Alibaba Security Yang, Bo CAICT Li, Shangyuan Tsinghua University Pan, Aimin Alibaba Security
SONIC GUN TO SMART DEVICES YOUR DEVICES LOSE CONTROL UNDER ULTRASOUND/SOUND Authors Wang, Zhengbo & Wang, Kang Alibaba Security Yang, Bo CAICT Li, Shangyuan Tsinghua University Pan, Aimin Alibaba Security
CIS 700/002: Special Topics: Acoustic Injection Attacks on MEMS Accelerometers
 CIS 700/002: Special Topics: Acoustic Injection Attacks on MEMS Accelerometers Thejas Kesari CIS 700/002: Security of EMBS/CPS/IoT Department of Computer and Information Science School of Engineering and
CIS 700/002: Special Topics: Acoustic Injection Attacks on MEMS Accelerometers Thejas Kesari CIS 700/002: Security of EMBS/CPS/IoT Department of Computer and Information Science School of Engineering and
Systematical Methods to Counter Drones in Controlled Manners
 Systematical Methods to Counter Drones in Controlled Manners Wenxin Chen, Garrett Johnson, Yingfei Dong Dept. of Electrical Engineering University of Hawaii 1 System Models u Physical system y Controller
Systematical Methods to Counter Drones in Controlled Manners Wenxin Chen, Garrett Johnson, Yingfei Dong Dept. of Electrical Engineering University of Hawaii 1 System Models u Physical system y Controller
FREQUENCY RESPONSE AND LATENCY OF MEMS MICROPHONES: THEORY AND PRACTICE
 APPLICATION NOTE AN22 FREQUENCY RESPONSE AND LATENCY OF MEMS MICROPHONES: THEORY AND PRACTICE This application note covers engineering details behind the latency of MEMS microphones. Major components of
APPLICATION NOTE AN22 FREQUENCY RESPONSE AND LATENCY OF MEMS MICROPHONES: THEORY AND PRACTICE This application note covers engineering details behind the latency of MEMS microphones. Major components of
Attack on the drones. Vectors of attack on small unmanned aerial vehicles Oleg Petrovsky / VB2015 Prague
 Attack on the drones Vectors of attack on small unmanned aerial vehicles Oleg Petrovsky / VB2015 Prague Google trends Google trends This is my drone. There are many like it, but this one is mine. Majority
Attack on the drones Vectors of attack on small unmanned aerial vehicles Oleg Petrovsky / VB2015 Prague Google trends Google trends This is my drone. There are many like it, but this one is mine. Majority
FLCS V2.1. AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station
 AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station The platform provides a high performance basis for electromechanical system control. Originally designed for autonomous aerial vehicle
AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station The platform provides a high performance basis for electromechanical system control. Originally designed for autonomous aerial vehicle
Indoor Positioning by the Fusion of Wireless Metrics and Sensors
 Indoor Positioning by the Fusion of Wireless Metrics and Sensors Asst. Prof. Dr. Özgür TAMER Dokuz Eylül University Electrical and Electronics Eng. Dept Indoor Positioning Indoor positioning systems (IPS)
Indoor Positioning by the Fusion of Wireless Metrics and Sensors Asst. Prof. Dr. Özgür TAMER Dokuz Eylül University Electrical and Electronics Eng. Dept Indoor Positioning Indoor positioning systems (IPS)
SMART SENSORS AND MEMS
 2 SMART SENSORS AND MEMS Dr. H. K. Verma Distinguished Professor (EEE) Sharda University, Greater Noida (Formerly: Deputy Director and Professor of Instrumentation Indian Institute of Technology Roorkee)
2 SMART SENSORS AND MEMS Dr. H. K. Verma Distinguished Professor (EEE) Sharda University, Greater Noida (Formerly: Deputy Director and Professor of Instrumentation Indian Institute of Technology Roorkee)
THE USE OF VOLUME VELOCITY SOURCE IN TRANSFER MEASUREMENTS
 THE USE OF VOLUME VELOITY SOURE IN TRANSFER MEASUREMENTS N. Møller, S. Gade and J. Hald Brüel & Kjær Sound and Vibration Measurements A/S DK850 Nærum, Denmark nbmoller@bksv.com Abstract In the automotive
THE USE OF VOLUME VELOITY SOURE IN TRANSFER MEASUREMENTS N. Møller, S. Gade and J. Hald Brüel & Kjær Sound and Vibration Measurements A/S DK850 Nærum, Denmark nbmoller@bksv.com Abstract In the automotive
GPS-Aided INS Datasheet Rev. 2.3
 GPS-Aided INS 1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined L1 & L2 GPS, GLONASS, GALILEO and BEIDOU navigation and
GPS-Aided INS 1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined L1 & L2 GPS, GLONASS, GALILEO and BEIDOU navigation and
Reference Diagram IDG-300. Coriolis Sense. Low-Pass Sensor. Coriolis Sense. Demodulator Y-RATE OUT YAGC R LPY C LPy ±10% EEPROM TRIM.
 FEATURES Integrated X- and Y-axis gyro on a single chip Factory trimmed full scale range of ±500 /sec Integrated low-pass filters High vibration rejection over a wide frequency range High cross-axis isolation
FEATURES Integrated X- and Y-axis gyro on a single chip Factory trimmed full scale range of ±500 /sec Integrated low-pass filters High vibration rejection over a wide frequency range High cross-axis isolation
Design and Implementation of FPGA Based Quadcopter
 Design and Implementation of FPGA Based Quadcopter G Premkumar 1 SCSVMV, Kanchipuram, Tamil Nadu, INDIA R Jayalakshmi 2 Assistant Professor, SCSVMV, Kanchipuram, Tamil Nadu, INDIA Md Akramuddin 3 Project
Design and Implementation of FPGA Based Quadcopter G Premkumar 1 SCSVMV, Kanchipuram, Tamil Nadu, INDIA R Jayalakshmi 2 Assistant Professor, SCSVMV, Kanchipuram, Tamil Nadu, INDIA Md Akramuddin 3 Project
ENHANCEMENTS IN UAV FLIGHT CONTROL AND SENSOR ORIENTATION
 Heinz Jürgen Przybilla Manfred Bäumker, Alexander Zurhorst ENHANCEMENTS IN UAV FLIGHT CONTROL AND SENSOR ORIENTATION Content Introduction Precise Positioning GNSS sensors and software Inertial and augmentation
Heinz Jürgen Przybilla Manfred Bäumker, Alexander Zurhorst ENHANCEMENTS IN UAV FLIGHT CONTROL AND SENSOR ORIENTATION Content Introduction Precise Positioning GNSS sensors and software Inertial and augmentation
Introducing the Quadrotor Flying Robot
 Introducing the Quadrotor Flying Robot Roy Brewer Organizer Philadelphia Robotics Meetup Group August 13, 2009 What is a Quadrotor? A vehicle having 4 rotors (propellers) at each end of a square cross
Introducing the Quadrotor Flying Robot Roy Brewer Organizer Philadelphia Robotics Meetup Group August 13, 2009 What is a Quadrotor? A vehicle having 4 rotors (propellers) at each end of a square cross
Todd Hubing. Clemson Vehicular Electronics Laboratory Clemson University
 Todd Hubing Clemson Vehicular Electronics Laboratory Clemson University FCC Emissions Test Radiation from a shielded commercial product with attached cables May 28 2 Typical Field Strengths FCC Class A
Todd Hubing Clemson Vehicular Electronics Laboratory Clemson University FCC Emissions Test Radiation from a shielded commercial product with attached cables May 28 2 Typical Field Strengths FCC Class A
OS3D-FG MINIATURE ATTITUDE & HEADING REFERENCE SYSTEM MINIATURE 3D ORIENTATION SENSOR OS3D-P. Datasheet Rev OS3D-FG Datasheet rev. 2.
 OS3D-FG OS3D-FG MINIATURE ATTITUDE & HEADING REFERENCE SYSTEM MINIATURE 3D ORIENTATION SENSOR OS3D-P Datasheet Rev. 2.0 1 The Inertial Labs OS3D-FG is a multi-purpose miniature 3D orientation sensor Attitude
OS3D-FG OS3D-FG MINIATURE ATTITUDE & HEADING REFERENCE SYSTEM MINIATURE 3D ORIENTATION SENSOR OS3D-P Datasheet Rev. 2.0 1 The Inertial Labs OS3D-FG is a multi-purpose miniature 3D orientation sensor Attitude
Direct Digital Amplification (DDX )
") WHITE PAPER Direct Amplification (DDX ) Pure Sound from Source to Speaker Apogee Technology, Inc. 129 Morgan Drive, Norwood, MA 02062 voice: (781) 551-9450 fax: (781) 440-9528 Email: info@apogeeddx.com
WHITE PAPER Direct Amplification (DDX ) Pure Sound from Source to Speaker Apogee Technology, Inc. 129 Morgan Drive, Norwood, MA 02062 voice: (781) 551-9450 fax: (781) 440-9528 Email: info@apogeeddx.com
IMU: Get started with Arduino and the MPU 6050 Sensor!
 1 of 5 16-3-2017 15:17 IMU Interfacing Tutorial: Get started with Arduino and the MPU 6050 Sensor! By Arvind Sanjeev, Founder of DIY Hacking Arduino MPU 6050 Setup In this post, I will be reviewing a few
1 of 5 16-3-2017 15:17 IMU Interfacing Tutorial: Get started with Arduino and the MPU 6050 Sensor! By Arvind Sanjeev, Founder of DIY Hacking Arduino MPU 6050 Setup In this post, I will be reviewing a few
Production Noise Immunity
 Production Noise Immunity S21 Module of the KLIPPEL ANALYZER SYSTEM (QC 6.1, db-lab 210) Document Revision 2.0 FEATURES Auto-detection of ambient noise Extension of Standard SPL task Supervises Rub&Buzz,
Production Noise Immunity S21 Module of the KLIPPEL ANALYZER SYSTEM (QC 6.1, db-lab 210) Document Revision 2.0 FEATURES Auto-detection of ambient noise Extension of Standard SPL task Supervises Rub&Buzz,
ARDUINO BASED CALIBRATION OF AN INERTIAL SENSOR IN VIEW OF A GNSS/IMU INTEGRATION
 Journal of Young Scientist, Volume IV, 2016 ISSN 2344-1283; ISSN CD-ROM 2344-1291; ISSN Online 2344-1305; ISSN-L 2344 1283 ARDUINO BASED CALIBRATION OF AN INERTIAL SENSOR IN VIEW OF A GNSS/IMU INTEGRATION
Journal of Young Scientist, Volume IV, 2016 ISSN 2344-1283; ISSN CD-ROM 2344-1291; ISSN Online 2344-1305; ISSN-L 2344 1283 ARDUINO BASED CALIBRATION OF AN INERTIAL SENSOR IN VIEW OF A GNSS/IMU INTEGRATION
Electronics Design Laboratory Lecture #11. ECEN 2270 Electronics Design Laboratory
 Electronics Design Laboratory Lecture # ECEN 7 Electronics Design Laboratory Project Must rely on fully functional Lab circuits, Lab circuit is optional Can re do wireless or replace it with a different
Electronics Design Laboratory Lecture # ECEN 7 Electronics Design Laboratory Project Must rely on fully functional Lab circuits, Lab circuit is optional Can re do wireless or replace it with a different
SCS SERIES INTRODUCTION
 SCS SERIES INTRODUCTION Introduced as the first models of Sonitron's piezoceramic speakers, the SCS-series are still being used for numerous applications. Good sound quality and limited distortion guarantee
SCS SERIES INTRODUCTION Introduced as the first models of Sonitron's piezoceramic speakers, the SCS-series are still being used for numerous applications. Good sound quality and limited distortion guarantee
3DM-GX4-45 LORD DATASHEET. GPS-Aided Inertial Navigation System (GPS/INS) Product Highlights. Features and Benefits. Applications
 Product Highlights. Features and Benefits. Applications") LORD DATASHEET 3DM-GX4-45 GPS-Aided Inertial Navigation System (GPS/INS) Product Highlights High performance integd GPS receiver and MEMS sensor technology provide direct and computed PVA outputs in a
LORD DATASHEET 3DM-GX4-45 GPS-Aided Inertial Navigation System (GPS/INS) Product Highlights High performance integd GPS receiver and MEMS sensor technology provide direct and computed PVA outputs in a
Assessing the likelihood of GNSS spoofing attacks on RPAS
 Assessing the likelihood of GNSS spoofing attacks on RPAS Mike Maarse UvA/NLR 30-06-2016 Mike Maarse (UvA/NLR) RP2 Presentation 30-06-2016 1 / 25 Introduction Motivation/relevance Growing number of RPAS
Assessing the likelihood of GNSS spoofing attacks on RPAS Mike Maarse UvA/NLR 30-06-2016 Mike Maarse (UvA/NLR) RP2 Presentation 30-06-2016 1 / 25 Introduction Motivation/relevance Growing number of RPAS
GPS-Aided INS Datasheet Rev. 2.6
 GPS-Aided INS 1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO and BEIDOU navigation
GPS-Aided INS 1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO and BEIDOU navigation
4GHz / 6GHz Radiation Measurement System
 4GHz / 6GHz Radiation Measurement System The MegiQ Radiation Measurement System (RMS) is a compact test system that performs 3-axis radiation pattern measurement in non-anechoic spaces. With a frequency
4GHz / 6GHz Radiation Measurement System The MegiQ Radiation Measurement System (RMS) is a compact test system that performs 3-axis radiation pattern measurement in non-anechoic spaces. With a frequency
3D Distortion Measurement (DIS)
") 3D Distortion Measurement (DIS) Module of the R&D SYSTEM S4 FEATURES Voltage and frequency sweep Steady-state measurement Single-tone or two-tone excitation signal DC-component, magnitude and phase of
3D Distortion Measurement (DIS) Module of the R&D SYSTEM S4 FEATURES Voltage and frequency sweep Steady-state measurement Single-tone or two-tone excitation signal DC-component, magnitude and phase of
TEST SUMMARY. Prüfbericht - Nr.: Test Report No FIELD STRENGTH OF FUNDAMENTAL RESULT: Passed % BANDWIDTH RESULT: Passed
 Seite 2 von 24 Page 2 of 24 TEST SUMMARY 5.1.1 FIELD STRENGTH OF FUNDAMENTAL RESULT: Passed 5.1.2 99% BANDWIDTH RESULT: Passed 5.1.3 SPURIOUS EMISSION RESULT: Passed 5.2.1 SPURIOUS EMISSION RESULT: Passed
Seite 2 von 24 Page 2 of 24 TEST SUMMARY 5.1.1 FIELD STRENGTH OF FUNDAMENTAL RESULT: Passed 5.1.2 99% BANDWIDTH RESULT: Passed 5.1.3 SPURIOUS EMISSION RESULT: Passed 5.2.1 SPURIOUS EMISSION RESULT: Passed
Attitude and Heading Reference Systems
 Attitude and Heading Reference Systems FY-AHRS-2000B Installation Instructions V1.0 Guilin FeiYu Electronic Technology Co., Ltd Addr: Rm. B305,Innovation Building, Information Industry Park,ChaoYang Road,Qi
Attitude and Heading Reference Systems FY-AHRS-2000B Installation Instructions V1.0 Guilin FeiYu Electronic Technology Co., Ltd Addr: Rm. B305,Innovation Building, Information Industry Park,ChaoYang Road,Qi
Dynamically Adaptive Inverted Pendulum Platfom
 Dynamically Adaptive Inverted Pendulum Platfom 2009 Colorado Space Grant Symposium Jonathon Cox Colorado State University Undergraduate in Electrical Engineering Email: csutke@gmail.com Web: www.campusaudio.com
Dynamically Adaptive Inverted Pendulum Platfom 2009 Colorado Space Grant Symposium Jonathon Cox Colorado State University Undergraduate in Electrical Engineering Email: csutke@gmail.com Web: www.campusaudio.com
NINTH INTERNATIONAL CONGRESS ON SOUND AND VIBRATION, ICSV9 ACTIVE VIBRATION ISOLATION OF DIESEL ENGINES IN SHIPS
 Page number: 1 NINTH INTERNATIONAL CONGRESS ON SOUND AND VIBRATION, ICSV9 ACTIVE VIBRATION ISOLATION OF DIESEL ENGINES IN SHIPS Xun Li, Ben S. Cazzolato and Colin H. Hansen Department of Mechanical Engineering,
Page number: 1 NINTH INTERNATIONAL CONGRESS ON SOUND AND VIBRATION, ICSV9 ACTIVE VIBRATION ISOLATION OF DIESEL ENGINES IN SHIPS Xun Li, Ben S. Cazzolato and Colin H. Hansen Department of Mechanical Engineering,
Data Sheet, V1.0, Aug SMM310. Silicon MEMS Microphone. Small Signal Discretes
 Data Sheet, V1.0, Aug. 2007 Small Signal Discretes Edition 2007-08-31 Published by Infineon Technologies AG 81726 München, Germany Infineon Technologies AG 2007. All Rights Reserved. Legal Disclaimer The
Data Sheet, V1.0, Aug. 2007 Small Signal Discretes Edition 2007-08-31 Published by Infineon Technologies AG 81726 München, Germany Infineon Technologies AG 2007. All Rights Reserved. Legal Disclaimer The
Motion Reference Units
 Motion Reference Units MRU Datasheet Rev. 1.3 IP-67 sealed 5% / 5 cm Heave accuracy 0.03 m/sec Velocity accuracy 0.05 deg Pitch and Roll accuracy 0.005 m/sec2 Acceleration accuracy 0.0002 deg/sec Angular
Motion Reference Units MRU Datasheet Rev. 1.3 IP-67 sealed 5% / 5 cm Heave accuracy 0.03 m/sec Velocity accuracy 0.05 deg Pitch and Roll accuracy 0.005 m/sec2 Acceleration accuracy 0.0002 deg/sec Angular
SPEEDBOX Technical Datasheet
 SPEEDBOX Technical Datasheet Race Technology Limited, 2008 Version 1.1 1. Introduction... 3 1.1. Product Overview... 3 1.2. Applications... 3 1.3. Standard Features... 3 2. Port / Connector details...
SPEEDBOX Technical Datasheet Race Technology Limited, 2008 Version 1.1 1. Introduction... 3 1.1. Product Overview... 3 1.2. Applications... 3 1.3. Standard Features... 3 2. Port / Connector details...
Speech Intelligibility Enhancement using Microphone Array via Intra-Vehicular Beamforming
 Speech Intelligibility Enhancement using Microphone Array via Intra-Vehicular Beamforming Senior Project Proposal Presentation Devin McDonald, Joseph Mesnard Advisors: Dr. Yufeng Lu, Dr. In Soo Ahn November
Speech Intelligibility Enhancement using Microphone Array via Intra-Vehicular Beamforming Senior Project Proposal Presentation Devin McDonald, Joseph Mesnard Advisors: Dr. Yufeng Lu, Dr. In Soo Ahn November
School of Surveying & Spatial Information Systems, UNSW, Sydney, Australia
 Development of an Unmanned Aerial Vehicle Platform Using Multisensor Navigation Technology School of Surveying & Spatial Information Systems, UNSW, Sydney, Australia Gang Sun 1,2, Jiawei Xie 1, Yong Li
Development of an Unmanned Aerial Vehicle Platform Using Multisensor Navigation Technology School of Surveying & Spatial Information Systems, UNSW, Sydney, Australia Gang Sun 1,2, Jiawei Xie 1, Yong Li
MEMS Solutions For VR & AR
 MEMS Solutions For VR & AR Sensor Expo 2017 San Jose June 28 th 2017 MEMS Sensors & Actuators at ST 2 Motion Environmental Audio Physical change Sense Electro MEMS Mechanical Signal Mechanical Actuate
MEMS Solutions For VR & AR Sensor Expo 2017 San Jose June 28 th 2017 MEMS Sensors & Actuators at ST 2 Motion Environmental Audio Physical change Sense Electro MEMS Mechanical Signal Mechanical Actuate
Motion Capture for Runners
 Motion Capture for Runners Design Team 8 - Spring 2013 Members: Blake Frantz, Zhichao Lu, Alex Mazzoni, Nori Wilkins, Chenli Yuan, Dan Zilinskas Sponsor: Air Force Research Laboratory Dr. Eric T. Vinande
Motion Capture for Runners Design Team 8 - Spring 2013 Members: Blake Frantz, Zhichao Lu, Alex Mazzoni, Nori Wilkins, Chenli Yuan, Dan Zilinskas Sponsor: Air Force Research Laboratory Dr. Eric T. Vinande
3DM -CV5-10 LORD DATASHEET. Inertial Measurement Unit (IMU) Product Highlights. Features and Benefits. Applications. Best in Class Performance
 Product Highlights. Features and Benefits. Applications. Best in Class Performance") LORD DATASHEET 3DM -CV5-10 Inertial Measurement Unit (IMU) Product Highlights Triaxial accelerometer, gyroscope, and sensors achieve the optimal combination of measurement qualities Smallest, lightest,
LORD DATASHEET 3DM -CV5-10 Inertial Measurement Unit (IMU) Product Highlights Triaxial accelerometer, gyroscope, and sensors achieve the optimal combination of measurement qualities Smallest, lightest,
INDOOR LOCATION SENSING AMBIENT MAGNETIC FIELD. Jaewoo Chung
 INDOOR LOCATION SENSING AMBIENT MAGNETIC FIELD Jaewoo Chung Positioning System INTRODUCTION Indoor positioning system using magnetic field as location reference Magnetic field inside building? Heading
INDOOR LOCATION SENSING AMBIENT MAGNETIC FIELD Jaewoo Chung Positioning System INTRODUCTION Indoor positioning system using magnetic field as location reference Magnetic field inside building? Heading
Characterization of medical devices electromagnetic immunity to environmental RF fields.
 Characterization of medical devices electromagnetic immunity to environmental RF fields. INTRODUCTION The diffusion of personal communication devices and radio communication systems has strongly increased
Characterization of medical devices electromagnetic immunity to environmental RF fields. INTRODUCTION The diffusion of personal communication devices and radio communication systems has strongly increased
EL6483: Sensors and Actuators
 EL6483: Sensors and Actuators EL6483 Spring 2016 EL6483 EL6483: Sensors and Actuators Spring 2016 1 / 15 Sensors Sensors measure signals from the external environment. Various types of sensors Variety
EL6483: Sensors and Actuators EL6483 Spring 2016 EL6483 EL6483: Sensors and Actuators Spring 2016 1 / 15 Sensors Sensors measure signals from the external environment. Various types of sensors Variety
Testing Autonomous Hover Algorithms Using a Quad rotor Helicopter Test Bed
 Testing Autonomous Hover Algorithms Using a Quad rotor Helicopter Test Bed In conjunction with University of Washington Distributed Space Systems Lab Justin Palm Andy Bradford Andrew Nelson Milestone One
Testing Autonomous Hover Algorithms Using a Quad rotor Helicopter Test Bed In conjunction with University of Washington Distributed Space Systems Lab Justin Palm Andy Bradford Andrew Nelson Milestone One
HALS-H1 Ground Surveillance & Targeting Helicopter
 ARATOS-SWISS Homeland Security AG & SMA PROGRESS, LLC HALS-H1 Ground Surveillance & Targeting Helicopter Defense, Emergency, Homeland Security (Border Patrol, Pipeline Monitoring)... Automatic detection
ARATOS-SWISS Homeland Security AG & SMA PROGRESS, LLC HALS-H1 Ground Surveillance & Targeting Helicopter Defense, Emergency, Homeland Security (Border Patrol, Pipeline Monitoring)... Automatic detection
Defense Technical Information Center Compilation Part Notice
 UNCLASSIFIED Defense Technical Information Center Compilation Part Notice ADPO10954 TITLE: INS/GPS for Strike Warfare Beyond the Year 2000 DISTRIBUTION: Approved for public release, distribution unlimited
UNCLASSIFIED Defense Technical Information Center Compilation Part Notice ADPO10954 TITLE: INS/GPS for Strike Warfare Beyond the Year 2000 DISTRIBUTION: Approved for public release, distribution unlimited
PERFORMANCE OF A NEW MEMS MEASUREMENT MICROPHONE AND ITS POTENTIAL APPLICATION
 PERFORMANCE OF A NEW MEMS MEASUREMENT MICROPHONE AND ITS POTENTIAL APPLICATION R Barham M Goldsmith National Physical Laboratory, Teddington, Middlesex, UK Teddington, Middlesex, UK 1 INTRODUCTION In deciding
PERFORMANCE OF A NEW MEMS MEASUREMENT MICROPHONE AND ITS POTENTIAL APPLICATION R Barham M Goldsmith National Physical Laboratory, Teddington, Middlesex, UK Teddington, Middlesex, UK 1 INTRODUCTION In deciding
Sensor system of a small biped entertainment robot
 Advanced Robotics, Vol. 18, No. 10, pp. 1039 1052 (2004) VSP and Robotics Society of Japan 2004. Also available online - www.vsppub.com Sensor system of a small biped entertainment robot Short paper TATSUZO
Advanced Robotics, Vol. 18, No. 10, pp. 1039 1052 (2004) VSP and Robotics Society of Japan 2004. Also available online - www.vsppub.com Sensor system of a small biped entertainment robot Short paper TATSUZO
Figure 1. SIG ACAM 100 and OptiNav BeamformX at InterNoise 2015.
 SIG ACAM 100 with OptiNav BeamformX Signal Interface Group s (SIG) ACAM 100 is a microphone array for locating and analyzing sound sources in real time. Combined with OptiNav s BeamformX software, it makes
SIG ACAM 100 with OptiNav BeamformX Signal Interface Group s (SIG) ACAM 100 is a microphone array for locating and analyzing sound sources in real time. Combined with OptiNav s BeamformX software, it makes
Integrated Dual-Axis Gyro IDG-1004
 Integrated Dual-Axis Gyro NOT RECOMMENDED FOR NEW DESIGNS. PLEASE REFER TO THE IDG-25 FOR A FUTIONALLY- UPGRADED PRODUCT APPLICATIONS GPS Navigation Devices Robotics Electronic Toys Platform Stabilization
Integrated Dual-Axis Gyro NOT RECOMMENDED FOR NEW DESIGNS. PLEASE REFER TO THE IDG-25 FOR A FUTIONALLY- UPGRADED PRODUCT APPLICATIONS GPS Navigation Devices Robotics Electronic Toys Platform Stabilization
Digitally Tuned Low Power Gyroscope
 Digitally Tuned Low Power Gyroscope Bernhard E. Boser & Chinwuba Ezekwe Berkeley Sensor & Actuator Center Dept. of Electrical Engineering and Computer Sciences University of California, Berkeley B. Boser
Digitally Tuned Low Power Gyroscope Bernhard E. Boser & Chinwuba Ezekwe Berkeley Sensor & Actuator Center Dept. of Electrical Engineering and Computer Sciences University of California, Berkeley B. Boser
Balanced Armature Check (BAC)
") Balanced Armature Check (BAC) S39 Module of the KLIPPEL ANALYZER SYSTEM (QC Ver. 6.1, db-lab Ver. 210) Document Revision 1.1 FEATURES Measure the Armature offset in μm No additional sensor required Ultra-fast
Balanced Armature Check (BAC) S39 Module of the KLIPPEL ANALYZER SYSTEM (QC Ver. 6.1, db-lab Ver. 210) Document Revision 1.1 FEATURES Measure the Armature offset in μm No additional sensor required Ultra-fast
OtoRead - Technical Specifications Page 0. Technical Specifications. OtoRead D A 2017/06
 OtoRead - Technical Specifications Page 0 Technical Specifications OtoRead D-0116698-A 2017/06 OtoRead - Technical Specifications Page 1 OtoRead TM Configuration Overview The OtoReadTM is available in
OtoRead - Technical Specifications Page 0 Technical Specifications OtoRead D-0116698-A 2017/06 OtoRead - Technical Specifications Page 1 OtoRead TM Configuration Overview The OtoReadTM is available in
Di6 / Di6t. Product Description
 Product Description Designed for a wide variety of sound reinforcement applications, the Tannoy Di6t is a high performance, ultra compact surface mount weather resistant loudspeaker. A full bandwidth loudspeaker
Product Description Designed for a wide variety of sound reinforcement applications, the Tannoy Di6t is a high performance, ultra compact surface mount weather resistant loudspeaker. A full bandwidth loudspeaker
ASR-2300 Multichannel SDR Module for PNT and Mobile communications. Dr. Michael B. Mathews Loctronix, Corporation
 ASR-2300 Multichannel SDR Module for PNT and Mobile communications GNU Radio Conference 2013 October 1, 2013 Boston, Massachusetts Dr. Michael B. Mathews Loctronix, Corporation Loctronix Corporation 2008,
ASR-2300 Multichannel SDR Module for PNT and Mobile communications GNU Radio Conference 2013 October 1, 2013 Boston, Massachusetts Dr. Michael B. Mathews Loctronix, Corporation Loctronix Corporation 2008,
NovAtel SPAN and Waypoint GNSS + INS Technology
 NovAtel SPAN and Waypoint GNSS + INS Technology SPAN Technology SPAN provides real-time positioning and attitude determination where traditional GNSS receivers have difficulties; in urban canyons or heavily
NovAtel SPAN and Waypoint GNSS + INS Technology SPAN Technology SPAN provides real-time positioning and attitude determination where traditional GNSS receivers have difficulties; in urban canyons or heavily
SOUND FIELD MEASUREMENTS INSIDE A REVERBERANT ROOM BY MEANS OF A NEW 3D METHOD AND COMPARISON WITH FEM MODEL
 SOUND FIELD MEASUREMENTS INSIDE A REVERBERANT ROOM BY MEANS OF A NEW 3D METHOD AND COMPARISON WITH FEM MODEL P. Guidorzi a, F. Pompoli b, P. Bonfiglio b, M. Garai a a Department of Industrial Engineering
SOUND FIELD MEASUREMENTS INSIDE A REVERBERANT ROOM BY MEANS OF A NEW 3D METHOD AND COMPARISON WITH FEM MODEL P. Guidorzi a, F. Pompoli b, P. Bonfiglio b, M. Garai a a Department of Industrial Engineering
Platform Independent Launch Vehicle Avionics
 Platform Independent Launch Vehicle Avionics Small Satellite Conference Logan, Utah August 5 th, 2014 Company Introduction Founded in 2011 The Co-Founders blend Academia and Commercial Experience ~20 Employees
Platform Independent Launch Vehicle Avionics Small Satellite Conference Logan, Utah August 5 th, 2014 Company Introduction Founded in 2011 The Co-Founders blend Academia and Commercial Experience ~20 Employees
Design and Navigation Control of an Advanced Level CANSAT. Mansur ÇELEBİ Aeronautics and Space Technologies Institute Turkish Air Force Academy
 Design and Navigation Control of an Advanced Level CANSAT Mansur ÇELEBİ Aeronautics and Space Technologies Institute Turkish Air Force Academy 1 Introduction Content Advanced Level CanSat Design Airframe
Design and Navigation Control of an Advanced Level CANSAT Mansur ÇELEBİ Aeronautics and Space Technologies Institute Turkish Air Force Academy 1 Introduction Content Advanced Level CanSat Design Airframe
Directed Energy Weapons in Modern Battlefield
 Advances in Military Technology Vol. 4, No. 2, December 2009 Directed Energy Weapons in Modern Battlefield L. Palíšek * Division VTÚPV Vyškov, VOP-026 Šternberk, s.p., Czech Republic The manuscript was
Advances in Military Technology Vol. 4, No. 2, December 2009 Directed Energy Weapons in Modern Battlefield L. Palíšek * Division VTÚPV Vyškov, VOP-026 Šternberk, s.p., Czech Republic The manuscript was
ASC IMU 7.X.Y. Inertial Measurement Unit (IMU) Description.
 Description.") Inertial Measurement Unit (IMU) 6-axis MEMS mini-imu Acceleration & Angular Rotation analog output 12-pin connector with detachable cable Aluminium housing Made in Germany Features Acceleration rate: ±2g
Inertial Measurement Unit (IMU) 6-axis MEMS mini-imu Acceleration & Angular Rotation analog output 12-pin connector with detachable cable Aluminium housing Made in Germany Features Acceleration rate: ±2g
Motion Reference Units
 Motion Reference Units MRU IP-67 sealed 5% / 5 cm Heave accuracy 0.03 m/sec Velocity accuracy 0.05 deg Pitch and Roll accuracy 0.005 m/sec 2 Acceleration accuracy 0.0002 deg/sec Angular rate accuracy NMEA
Motion Reference Units MRU IP-67 sealed 5% / 5 cm Heave accuracy 0.03 m/sec Velocity accuracy 0.05 deg Pitch and Roll accuracy 0.005 m/sec 2 Acceleration accuracy 0.0002 deg/sec Angular rate accuracy NMEA
OughtToPilot. Project Report of Submission PC128 to 2008 Propeller Design Contest. Jason Edelberg
 OughtToPilot Project Report of Submission PC128 to 2008 Propeller Design Contest Jason Edelberg Table of Contents Project Number.. 3 Project Description.. 4 Schematic 5 Source Code. Attached Separately
OughtToPilot Project Report of Submission PC128 to 2008 Propeller Design Contest Jason Edelberg Table of Contents Project Number.. 3 Project Description.. 4 Schematic 5 Source Code. Attached Separately
DEVELOPMENT OF AN AUTONOMOUS SMALL SCALE ELECTRIC CAR
 Jurnal Mekanikal June 2015, Vol 38, 81-91 DEVELOPMENT OF AN AUTONOMOUS SMALL SCALE ELECTRIC CAR Amzar Omairi and Saiful Anuar Abu Bakar* Department of Aeronautics, Automotive and Ocean Engineering Faculty
Jurnal Mekanikal June 2015, Vol 38, 81-91 DEVELOPMENT OF AN AUTONOMOUS SMALL SCALE ELECTRIC CAR Amzar Omairi and Saiful Anuar Abu Bakar* Department of Aeronautics, Automotive and Ocean Engineering Faculty
Defeating Magnetic Interference on the Battlefield
 Defeating Magnetic Interference on the Battlefield How multiple sensory inputs are enabling lightweight robust weapon pointing for mortar fire control systems Presented by Michael Wright & Ralph Tillinghast
Defeating Magnetic Interference on the Battlefield How multiple sensory inputs are enabling lightweight robust weapon pointing for mortar fire control systems Presented by Michael Wright & Ralph Tillinghast
NEXT-LAB SENSOR Scritto da Administrator Martedì 24 Settembre :01 - Ultimo aggiornamento Mercoledì 20 Luglio :44 NEXT-LAB SENSOR 1 / 7
 NEXT-LAB SENSOR 1 / 7 3 Diversi strumenti per i moduli NEXT Next-Lab SPL Sensor A high precision sensor for measuring sound pressure - Lab-Bus digital bus - Internal precision ADC 16 Bit - Frequency range
NEXT-LAB SENSOR 1 / 7 3 Diversi strumenti per i moduli NEXT Next-Lab SPL Sensor A high precision sensor for measuring sound pressure - Lab-Bus digital bus - Internal precision ADC 16 Bit - Frequency range
VQ 60. Product Description. Features. Applications
 VQ 6 Product Description The VQ 6 is a full range, three-way loudspeaker system designed for applications which require very high output capability with class leading pattern control. The VQ 6 is perfectly
VQ 6 Product Description The VQ 6 is a full range, three-way loudspeaker system designed for applications which require very high output capability with class leading pattern control. The VQ 6 is perfectly
430. The Research System for Vibration Analysis in Domestic Installation Pipes
 430. The Research System for Vibration Analysis in Domestic Installation Pipes R. Ramanauskas, D. Gailius, V. Augutis Kaunas University of Technology, Studentu str. 50, LT-51424, Kaunas, Lithuania e-mail:
430. The Research System for Vibration Analysis in Domestic Installation Pipes R. Ramanauskas, D. Gailius, V. Augutis Kaunas University of Technology, Studentu str. 50, LT-51424, Kaunas, Lithuania e-mail:
Surface Micromachining
 Surface Micromachining An IC-Compatible Sensor Technology Bernhard E. Boser Berkeley Sensor & Actuator Center Dept. of Electrical Engineering and Computer Sciences University of California, Berkeley Sensor
Surface Micromachining An IC-Compatible Sensor Technology Bernhard E. Boser Berkeley Sensor & Actuator Center Dept. of Electrical Engineering and Computer Sciences University of California, Berkeley Sensor
Acoustic Yagi Uda Antenna Using Resonance Tubes
 Acoustic Yagi Uda Antenna Using Resonance Tubes Yuki TAMURA 1 ; Kohei YATABE 2 ; Yasuhiro OUCHI 3 ; Yasuhiro OIKAWA 4 ; Yoshio YAMASAKI 5 1 5 Waseda University, Japan ABSTRACT A Yagi Uda antenna gets high
Acoustic Yagi Uda Antenna Using Resonance Tubes Yuki TAMURA 1 ; Kohei YATABE 2 ; Yasuhiro OUCHI 3 ; Yasuhiro OIKAWA 4 ; Yoshio YAMASAKI 5 1 5 Waseda University, Japan ABSTRACT A Yagi Uda antenna gets high
INERTIAL LABS SUBMINIATURE 3D ORIENTATION SENSOR OS3DM
 Datasheet Rev..5 INERTIAL LABS SUBMINIATURE D ORIENTATION SENSOR TM Inertial Labs, Inc Address: 9959 Catoctin Ridge Street, Paeonian Springs, VA 2029 U.S.A. Tel: + (70) 880-4222, Fax: + (70) 95-877 Website:
Datasheet Rev..5 INERTIAL LABS SUBMINIATURE D ORIENTATION SENSOR TM Inertial Labs, Inc Address: 9959 Catoctin Ridge Street, Paeonian Springs, VA 2029 U.S.A. Tel: + (70) 880-4222, Fax: + (70) 95-877 Website:
Di6. Product Description. Features. Applications
 Product Description Designed for a wide variety of sound reinforcement applications, the Tannoy Di6 is a high performance, ultra compact surface mount weather resistant loudspeaker. Afull bandwidth loudspeaker
Product Description Designed for a wide variety of sound reinforcement applications, the Tannoy Di6 is a high performance, ultra compact surface mount weather resistant loudspeaker. Afull bandwidth loudspeaker
Integrated Navigation System
 Integrated Navigation System Adhika Lie adhika@aem.umn.edu AEM 5333: Design, Build, Model, Simulate, Test and Fly Small Uninhabited Aerial Vehicles Feb 14, 2013 1 Navigation System Where am I? Position,
Integrated Navigation System Adhika Lie adhika@aem.umn.edu AEM 5333: Design, Build, Model, Simulate, Test and Fly Small Uninhabited Aerial Vehicles Feb 14, 2013 1 Navigation System Where am I? Position,
GPS-Aided INS Datasheet Rev. 3.0
 1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS, BEIDOU and L-Band navigation
1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS, BEIDOU and L-Band navigation
iw6 DS Product Description Features Applications
 Product Description The Tannoy iw6 DS is a full bandwidth in wall speaker system, using a 165mm (6.5") bass and mid-range driver and a 25mm (1.") WideBand high frequency unit, designed for installation
Product Description The Tannoy iw6 DS is a full bandwidth in wall speaker system, using a 165mm (6.5") bass and mid-range driver and a 25mm (1.") WideBand high frequency unit, designed for installation
Master Op-Doc/Test Plan
 Power Supply Master Op-Doc/Test Plan Define Engineering Specs Establish battery life Establish battery technology Establish battery size Establish number of batteries Establish weight of batteries Establish
Power Supply Master Op-Doc/Test Plan Define Engineering Specs Establish battery life Establish battery technology Establish battery size Establish number of batteries Establish weight of batteries Establish
Sonic Distance Sensors
 Sonic Distance Sensors Introduction - Sound is transmitted through the propagation of pressure in the air. - The speed of sound in the air is normally 331m/sec at 0 o C. - Two of the important characteristics
Sonic Distance Sensors Introduction - Sound is transmitted through the propagation of pressure in the air. - The speed of sound in the air is normally 331m/sec at 0 o C. - Two of the important characteristics
Technical Specifications KF853
 Technical Specifications F853 APPLICATIONS The F853 Virtual Array System is a long-throw two way horn-loaded loudspeaker designed to cover the frequency range from 2Hz to 17kHz. The frequency response
Technical Specifications F853 APPLICATIONS The F853 Virtual Array System is a long-throw two way horn-loaded loudspeaker designed to cover the frequency range from 2Hz to 17kHz. The frequency response
SELF STABILIZING PLATFORM
 SELF STABILIZING PLATFORM Shalaka Turalkar 1, Omkar Padvekar 2, Nikhil Chavan 3, Pritam Sawant 4 and Project Guide: Mr Prathamesh Indulkar 5. 1,2,3,4,5 Department of Electronics and Telecommunication,
SELF STABILIZING PLATFORM Shalaka Turalkar 1, Omkar Padvekar 2, Nikhil Chavan 3, Pritam Sawant 4 and Project Guide: Mr Prathamesh Indulkar 5. 1,2,3,4,5 Department of Electronics and Telecommunication,
TACOT Project. Trusted multi Application receiver for Trucks. Bordeaux, 4 June 2014
 TACOT Project Trusted multi Application receiver for Trucks Bordeaux, 4 June 2014 Agenda TACOT Context & Solution Technical developments Test & Validation results Conclusions GNSS ease our lives GNSS is
TACOT Project Trusted multi Application receiver for Trucks Bordeaux, 4 June 2014 Agenda TACOT Context & Solution Technical developments Test & Validation results Conclusions GNSS ease our lives GNSS is
VTech R&D Design Support Capability
 VTech R&D Design Support Capability VTech Communication Ltd [CMS] Prepared by: YF Poon Date: Nov 2016 1 Design Capabilities R&D Design Services Electronic (both HW & SW Design) Schematic and PCB Layout
VTech R&D Design Support Capability VTech Communication Ltd [CMS] Prepared by: YF Poon Date: Nov 2016 1 Design Capabilities R&D Design Services Electronic (both HW & SW Design) Schematic and PCB Layout
MEASUREMENT of physical conditions in buildings
 INTL JOURNAL OF ELECTRONICS AND TELECOMMUNICATIONS, 2012, VOL. 58, NO. 2, PP. 117 122 Manuscript received August 29, 2011; revised May, 2012. DOI: 10.2478/v10177-012-0016-4 Digital Vibration Sensor Constructed
INTL JOURNAL OF ELECTRONICS AND TELECOMMUNICATIONS, 2012, VOL. 58, NO. 2, PP. 117 122 Manuscript received August 29, 2011; revised May, 2012. DOI: 10.2478/v10177-012-0016-4 Digital Vibration Sensor Constructed
Multi-Receiver Vector Tracking
 Multi-Receiver Vector Tracking Yuting Ng and Grace Xingxin Gao please feel free to view the.pptx version for the speaker notes Cutting-Edge Applications UAV formation flight remote sensing interference
Multi-Receiver Vector Tracking Yuting Ng and Grace Xingxin Gao please feel free to view the.pptx version for the speaker notes Cutting-Edge Applications UAV formation flight remote sensing interference
GPS-Aided INS Datasheet Rev. 2.7
 1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS and BEIDOU navigation and highperformance
1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS and BEIDOU navigation and highperformance
High intensity and low frequency tube sound transmission loss measurements for automotive intake components
 High intensity and low frequency tube sound transmission loss measurements for automotive intake components Edward R. Green a) Sound Answers, Inc., 6855 Commerce Boulevard, Canton, Michigan, 48187 USA
High intensity and low frequency tube sound transmission loss measurements for automotive intake components Edward R. Green a) Sound Answers, Inc., 6855 Commerce Boulevard, Canton, Michigan, 48187 USA
UL Japan, Inc. Head Office EMC Lab Asama-cho, Ise-shi, Mie-ken JAPAN Telephone : Facsimile :
 Page : 2 of 19 CONTENTS PAGE SECTION 1: Client information... 3 SECTION 2: Equipment under test (E.U.T.)... 3 SECTION 3: Test specification, procedures & results... 5 SECTION 4: Operation of E.U.T. during
Page : 2 of 19 CONTENTS PAGE SECTION 1: Client information... 3 SECTION 2: Equipment under test (E.U.T.)... 3 SECTION 3: Test specification, procedures & results... 5 SECTION 4: Operation of E.U.T. during
Inertial Sensors. Ellipse 2 Series MINIATURE HIGH PERFORMANCE. Navigation, Motion & Heave Sensing IMU AHRS MRU INS VG
 Ellipse 2 Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Ellipse 2 Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
OBSTACLE DETECTION AND COLLISION AVOIDANCE USING ULTRASONIC DISTANCE SENSORS FOR AN AUTONOMOUS QUADROCOPTER
 OBSTACLE DETECTION AND COLLISION AVOIDANCE USING ULTRASONIC DISTANCE SENSORS FOR AN AUTONOMOUS QUADROCOPTER Nils Gageik, Thilo Müller, Sergio Montenegro University of Würzburg, Aerospace Information Technology
OBSTACLE DETECTION AND COLLISION AVOIDANCE USING ULTRASONIC DISTANCE SENSORS FOR AN AUTONOMOUS QUADROCOPTER Nils Gageik, Thilo Müller, Sergio Montenegro University of Würzburg, Aerospace Information Technology
Sound source localization accuracy of ambisonic microphone in anechoic conditions
 Sound source localization accuracy of ambisonic microphone in anechoic conditions Pawel MALECKI 1 ; 1 AGH University of Science and Technology in Krakow, Poland ABSTRACT The paper presents results of determination
Sound source localization accuracy of ambisonic microphone in anechoic conditions Pawel MALECKI 1 ; 1 AGH University of Science and Technology in Krakow, Poland ABSTRACT The paper presents results of determination
Inertial Sensors. Ellipse 2 Series MINIATURE HIGH PERFORMANCE. Navigation, Motion & Heave Sensing IMU AHRS MRU INS VG
 Ellipse 2 Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Ellipse 2 Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
CMS601. Product Description. Features. Applications
 CMS61 Product Description The Tannoy CMS61 is a full bandwidth; high power and high sensitivity ceiling monitor system. The design comprises a 165mm (6.5") transducer mounted in a vented, injection moulded,
CMS61 Product Description The Tannoy CMS61 is a full bandwidth; high power and high sensitivity ceiling monitor system. The design comprises a 165mm (6.5") transducer mounted in a vented, injection moulded,
LINEAR 5 LTS A THE NEW PERFORMANCE CLASS > LONG THROW. ULTRA COMPACT. ECONOMICAL.
 LINEAR 5 LTS A THE NEW PERFORMANCE CLASS > LONG THROW. ULTRA COMPACT. ECONOMICAL. What does it take to throw the entire frequency spectrum over 30 meters and beyond? Only large line arrays pack a punch
LINEAR 5 LTS A THE NEW PERFORMANCE CLASS > LONG THROW. ULTRA COMPACT. ECONOMICAL. What does it take to throw the entire frequency spectrum over 30 meters and beyond? Only large line arrays pack a punch
Annex to the Accreditation Certificate D-K according to DIN EN ISO/IEC 17025:2005
 Deutsche Akkreditierungsstelle GmbH German Accreditation Body Annex the Accreditation Certificate D-K-15183-01-00 according DIN EN ISOIEC 17025:2005 Period of validity: 19.12.2017 18.12.2022 Holder of
Deutsche Akkreditierungsstelle GmbH German Accreditation Body Annex the Accreditation Certificate D-K-15183-01-00 according DIN EN ISOIEC 17025:2005 Period of validity: 19.12.2017 18.12.2022 Holder of
Heterogeneous Control of Small Size Unmanned Aerial Vehicles
 Magyar Kutatók 10. Nemzetközi Szimpóziuma 10 th International Symposium of Hungarian Researchers on Computational Intelligence and Informatics Heterogeneous Control of Small Size Unmanned Aerial Vehicles
Magyar Kutatók 10. Nemzetközi Szimpóziuma 10 th International Symposium of Hungarian Researchers on Computational Intelligence and Informatics Heterogeneous Control of Small Size Unmanned Aerial Vehicles
FCC ID: A3LSLS-BD106Q. Report No.: HCT-RF-1801-FC003. Plot Data for Output Port 2_QPSK 9 khz ~ 150 khz Middle channel 150 khz ~ 30 MHz Low channel
 Plot Data for Output Port 2_QPSK 9 khz ~ 150 khz Middle channel 150 khz ~ 30 MHz Low channel 30 MHz ~ 1 GHz Middle channel 1 GHz ~ 2.491 GHz Low channel 2.695 GHz ~ 12.75 GHz High channel 12.75 GHz ~ 26.5
Plot Data for Output Port 2_QPSK 9 khz ~ 150 khz Middle channel 150 khz ~ 30 MHz Low channel 30 MHz ~ 1 GHz Middle channel 1 GHz ~ 2.491 GHz Low channel 2.695 GHz ~ 12.75 GHz High channel 12.75 GHz ~ 26.5
The Next Generation Design of Autonomous MAV Flight Control System SmartAP
 The Next Generation Design of Autonomous MAV Flight Control System SmartAP Kirill Shilov Department of Aeromechanics and Flight Engineering Moscow Institute of Physics and Technology 16 Gagarina st, Zhukovsky,
The Next Generation Design of Autonomous MAV Flight Control System SmartAP Kirill Shilov Department of Aeromechanics and Flight Engineering Moscow Institute of Physics and Technology 16 Gagarina st, Zhukovsky,
Lt Col Greg Vansuch. Special Projects Office. DARPATech September 2000
 Lt Col Greg Vansuch DARPATech 2000 6-8 September 2000 Guidance Technology Programs MEMS INS Gyroscopes 1.0 to 10 /hr Accelerometers 500 mg 10 in 3, 0.8 lbs Global Positioning Experiments Airborne Pseudolite
Lt Col Greg Vansuch DARPATech 2000 6-8 September 2000 Guidance Technology Programs MEMS INS Gyroscopes 1.0 to 10 /hr Accelerometers 500 mg 10 in 3, 0.8 lbs Global Positioning Experiments Airborne Pseudolite
Cooperative navigation (part II)
") Cooperative navigation (part II) An example using foot-mounted INS and UWB-transceivers Jouni Rantakokko Aim Increased accuracy during long-term operations in GNSS-challenged environments for - First responders
Cooperative navigation (part II) An example using foot-mounted INS and UWB-transceivers Jouni Rantakokko Aim Increased accuracy during long-term operations in GNSS-challenged environments for - First responders