Chapter 1: Introduction to Control Systems Objectives
|
|
|
- Cordelia Grant
- 5 years ago
- Views:
Transcription
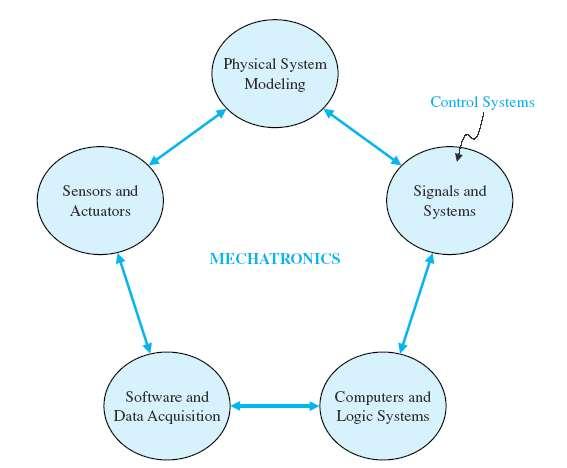
1 Chapter 1: Introduction to Control Systems Objectives In this chapter we describe a general process for designing a control system. A control system consisting of interconnected components is designed to achieve a desired purpose. To understand the purpose of a control system, it is useful to examine examples of control systems through the course of history. These early systems incorporated many of the same ideas of feedback that are in use today. Modern control engineering practice includes the use of control design strategies for improving manufacturing processes, the efficiency of energy use, advanced automobile control, including rapid transit, among others. We also discuss the notion of a design gap. The gap exists between the complex physical system under investigation and the model used in the control system synthesis. The iterative nature of design allows us to handle the design gap effectively while accomplishing necessary tradeoffs in complexity, performance, and cost in order to meet the design specifications. Illustrations
2 Course Synopsis Provides a background of control principles in various engineering applications. Basic mathematical tools such as Laplace transform, transfer function, block diagram, signal flow graph, mathematical modeling of dynamic systems, time response analysis, stability of linear system, root locus and frequency domain analysis are utilized. Illustrations
3 Course Outcomes (CO) CO1 Ability to apply various mathematical principles (from calculus and linear algebra) to solve control system problems. CO2 Ability to obtain mathematical models for such mechanical, electrical and electromechanical systems. CO3 Ability to derive equivalent differential equation, transfer function and state space model for a given system. CO4 The ability to perform system s time and frequency-domain analysis with response to test inputs. Analysis includes the determination of the system stability. Illustrations
4 System An interconnection of elements and devices for a desired purpose. Control System An interconnection of components forming a system configuration that will provide a desired response. Process The device, plant, or system under control. The input and output relationship represents the cause-andeffect relationship of the process. Illustrations

5 The interaction is defined in terms of variables. i. System input ii. System output iii. Environmental disturbances Illustrations
6 Control System Control is the process of causing a system variable to conform to some desired value. Manual control Automatic control (involving machines only). A control system is an interconnection of components forming a system configuration that will provide a desired system response. Input Signal Control System Output Signal Energy Source Illustrations
7 Open-Loop Control Systems utilize a controller or control actuator to obtain the desired response. Closed-Loop Control Systems utilizes feedback to compare the actual output to the desired output response. Multivariable Control System Illustrations
8 Control System Classification Missile Launcher System Open-Loop Control System Illustrations

9 Control System Classification Missile Launcher System Closed-Loop Feedback Control System Illustrations

10 Manual Vs Automatic Control Control is a process of causing a system variable such as temperature or position to conform to some desired value or trajectory, called reference value or trajectory. For example, driving a car implies controlling the vehicle to follow the desired path to arrive safely at a planned destination. i. If you are driving the car yourself, you are performing manual control of the car. ii. If you use design a machine, or use a computer to do it, then you have built an automatic control system. Illustrations
11 Control System Classification Desired Output Respons e Controller Process Output Variable s Measurement Multi Input Multi Output (MIMO) System Illustrations
12 Purpose of Control Systems i. Power Amplification (Gain) Positioning of a large radar antenna by low-power rotation of a knob ii. Remote Control Robotic arm used to pick up radioactive materials iii. Convenience of Input Form Changing room temperature by thermostat position iv. Compensation for Disturbances Controlling antenna position in the presence of large wind disturbance torque Illustrations
13 Historical Developments i. Ancient Greece (1 to 300 BC) Water float regulation, water clock, automatic oil lamp ii. Cornellis Drebbel (17 th century) Temperature control iii. James Watt (18 th century) Flyball governor iv. Late 19 th to mid 20 th century Modern control theory Illustrations

14 Watt s Flyball Governor

15 Human System The Vetruvian Man Illustrations
16 Human System i. Pancreas Regulates blood glucose level ii. Adrenaline Automatically generated to increase the heart rate and oxygen in times of flight iii. Eye Follow moving object iv. Hand Pick up an object and place it at a predetermined location v. Temperature Regulated temperature of 36 C to 37 C Illustrations
17 History 18th Century James Watt s centrifugal governor for the speed control of a steam engine. 1920s Minorsky worked on automatic controllers for steering ships. 1930s Nyquist developed a method for analyzing the stability of controlled systems 1940s Frequency response methods made it possible to design linear closed-loop control systems 1950s Root-locus method due to Evans was fully developed 1960s State space methods, optimal control, adaptive control and 1980s Learning controls are begun to investigated and developed. Present and on-going research fields. Recent application of modern control theory includes such non-engineering systems such as biological, biomedical, economic and socio-economic systems??????????????????????????????????? Illustrations
18 Control System Components i. System, plant or process To be controlled ii. Actuators Converts the control signal to a power signal iii. Sensors Provides measurement of the system output iv. Reference input Represents the desired output Illustrations
19 General Control System Disturbance Set-point or Reference input Error Controlle d Signal Manipulate d Variable + + Controller Actuator + Process Actual Output Feedback Signal Sensor Illustrations
20 Control System Design Process 1. Establish control goals 2. Identify the variables to control 3. Write the specifications for the variables 4. Establish the system configuration and identify the actuator If the performance does not meet specifications, then iterate the configuration and actuator 5. Obtain a model of the process, the actuator and the sensor 6. Describe a controller and select key parameters to be adjusted 7. Optimize the parameters and analyze the performance If the performance meet the specifications, then finalize design Illustrations
21
 The driver uses the difference between the actual and the desired direction of travel to generate a controlled adjustment of the")
22 Examples of Modern Control Systems (a) Automobile steering control system. (b) The driver uses the difference between the actual and the desired direction of travel to generate a controlled adjustment of the steering wheel. (c) Typical directionof-travel response. Illustrations
23 Examples of Modern Control Systems

24 Examples of Modern Control Systems
25 Examples of Modern Control Systems
26 Examples of Modern Control Systems
27 Examples of Modern Control Systems


28 Examples of Modern Control Systems
29 Examples of Modern Control Systems

30 Examples of Modern Control Systems

31 The Future of Control Systems
32 The Future of Control Systems
33 Design Example
34 Design Example ELECTRIC SHIP CONCEPT Vision Integrated Power System Electric Drive Reduce # of Prime Movers Fuel savings Reduced maintenance All Electric Ship Reduced manning Automation Eliminate auxiliary systems (steam, hydraulics, compressed air) Electrically Reconfigurable Ship Technology Insertion Warfighting Capabilities Propulsion Motor Increasing Affordability and Military Capability Motor Drive Main Power Distribution Generator Prime Mover Power Conversion Module Ship Service Power Illustrations

35 Design Example CVN(X) FUTURE AIRCRAFT CARRIER Illustrations
36 Design Example

37 Design Example
38 Design Example
39 Design Example
40
41

42 Design Example
43 Design Example

44 Sequential Design Example
45
46 Sequential Design Example
47
48
Intro to Automation and Controls by: P. Ribeiro Calvin College
 Intro to Automation and Controls by: P. Ribeiro Calvin College Link: https://www.calvin.edu/~pribeiro/courses/engr315/lecturesnotes/ Chapter 1: Introduction to Control Systems Objectives In this chapter
Intro to Automation and Controls by: P. Ribeiro Calvin College Link: https://www.calvin.edu/~pribeiro/courses/engr315/lecturesnotes/ Chapter 1: Introduction to Control Systems Objectives In this chapter
Biomedical Control Systems. Lecture#01
 1 Biomedical Control Systems Lecture#01 2 Text Books Modern Control Engineering, 5 th Edition; Ogata. Feedback & Control Systems, 2 nd edition; Schaum s outline, Joseph J, Allen R. Control Systems Engineering,
1 Biomedical Control Systems Lecture#01 2 Text Books Modern Control Engineering, 5 th Edition; Ogata. Feedback & Control Systems, 2 nd edition; Schaum s outline, Joseph J, Allen R. Control Systems Engineering,
Lecture#1 Handout. Plant has one or more inputs and one or more outputs, which can be represented by a block, as shown below.
 Lecture#1 Handout Introduction A system or a process or a plant is a segment of environment that is under consideration (working definition). Control is a term that describes the process of forcing a system
Lecture#1 Handout Introduction A system or a process or a plant is a segment of environment that is under consideration (working definition). Control is a term that describes the process of forcing a system
SMJE 3153 Control System. Department of ESE, MJIIT, UTM 2014/2015
 SMJE 3153 Control System Department of ESE, MJIIT, UTM 2014/2015 1 Course Outline Course Instructors Prof Nozomu Hamada (hamada@utm.my)and Dr. Mohd Azizi Abdul Rahman Course Web site UTM e-learning site
SMJE 3153 Control System Department of ESE, MJIIT, UTM 2014/2015 1 Course Outline Course Instructors Prof Nozomu Hamada (hamada@utm.my)and Dr. Mohd Azizi Abdul Rahman Course Web site UTM e-learning site
LINEAR CONTROL SYSTEMS
 LINEAR CONTROL SYSTEMS Ali Karimpour Associate Professor Ferdowsi Uniersity of Mashhad Prerequisite English Knowledge Primary Mathematics MATLAB Software 2 Syllabus An Introduction to Linear Control Systems.(Lecture
LINEAR CONTROL SYSTEMS Ali Karimpour Associate Professor Ferdowsi Uniersity of Mashhad Prerequisite English Knowledge Primary Mathematics MATLAB Software 2 Syllabus An Introduction to Linear Control Systems.(Lecture
MECHATRONICS SYSTEM DESIGN
 MECHATRONICS SYSTEM DESIGN (MtE-325) TODAYS LECTURE Control systems Open-Loop Control Systems Closed-Loop Control Systems Transfer Functions Analog and Digital Control Systems Controller Configurations
MECHATRONICS SYSTEM DESIGN (MtE-325) TODAYS LECTURE Control systems Open-Loop Control Systems Closed-Loop Control Systems Transfer Functions Analog and Digital Control Systems Controller Configurations
Executive Summary. Chapter 1. Overview of Control
 Chapter 1 Executive Summary Rapid advances in computing, communications, and sensing technology offer unprecedented opportunities for the field of control to expand its contributions to the economic and
Chapter 1 Executive Summary Rapid advances in computing, communications, and sensing technology offer unprecedented opportunities for the field of control to expand its contributions to the economic and
Introduction to Digital Control
 Introduction to Digital Control Control systems are an integral part of modern society. Control systems exist in many systems of engineering, sciences, and in human body. Control means to regulate, direct,
Introduction to Digital Control Control systems are an integral part of modern society. Control systems exist in many systems of engineering, sciences, and in human body. Control means to regulate, direct,
CHAPTER 1 Introduction of Control System
 CHAPTER 1 Introduction of Control System DR. SHAFISHUHAZA SAHLAN DR. SHAHDAN SUDIN DR. HERMAN WAHID DR. FATIMAH SHAM ISMAIL Department of Control and Mechatronics Engineering Faculty of Electrical Engineering
CHAPTER 1 Introduction of Control System DR. SHAFISHUHAZA SAHLAN DR. SHAHDAN SUDIN DR. HERMAN WAHID DR. FATIMAH SHAM ISMAIL Department of Control and Mechatronics Engineering Faculty of Electrical Engineering
Hardware Implementation of Automatic Control Systems using FPGAs
 Hardware Implementation of Automatic Control Systems using FPGAs Lecturer PhD Eng. Ionel BOSTAN Lecturer PhD Eng. Florin-Marian BÎRLEANU Romania Disclaimer: This presentation tries to show the current
Hardware Implementation of Automatic Control Systems using FPGAs Lecturer PhD Eng. Ionel BOSTAN Lecturer PhD Eng. Florin-Marian BÎRLEANU Romania Disclaimer: This presentation tries to show the current
COURSE MODULES LEVEL 3.1 & 3.2
 COURSE MODULES LEVEL 3.1 & 3.2 6-Month Internship The six-month internship provides students with the opportunity to apply the knowledge acquired in the classroom to work situations, and demonstrate problem
COURSE MODULES LEVEL 3.1 & 3.2 6-Month Internship The six-month internship provides students with the opportunity to apply the knowledge acquired in the classroom to work situations, and demonstrate problem
DC motor control using arduino
 DC motor control using arduino 1) Introduction: First we need to differentiate between DC motor and DC generator and where we can use it in this experiment. What is the main different between the DC-motor,
DC motor control using arduino 1) Introduction: First we need to differentiate between DC motor and DC generator and where we can use it in this experiment. What is the main different between the DC-motor,
Introduction to Control Systems
 Introduction to Control Systems MEM 355 Performance Enhancement of Dynamical Systems Harry G. Kwatny Department of Mechanical Engineering & Mechanics Drexel University Outline Course practical information
Introduction to Control Systems MEM 355 Performance Enhancement of Dynamical Systems Harry G. Kwatny Department of Mechanical Engineering & Mechanics Drexel University Outline Course practical information
Welcome to SENG 480B / CSC 485A / CSC 586A Self-Adaptive and Self-Managing Systems
 Welcome to SENG 480B / CSC 485A / CSC 586A Self-Adaptive and Self-Managing Systems Dr. Hausi A. Müller Department of Computer Science University of Victoria http://courses.seng.uvic.ca/courses/2015/summer/seng/480a
Welcome to SENG 480B / CSC 485A / CSC 586A Self-Adaptive and Self-Managing Systems Dr. Hausi A. Müller Department of Computer Science University of Victoria http://courses.seng.uvic.ca/courses/2015/summer/seng/480a
Glossary of terms. Short explanation
 Glossary Concept Module. Video Short explanation Abstraction 2.4 Capturing the essence of the behavior of interest (getting a model or representation) Action in the control Derivative 4.2 The control signal
Glossary Concept Module. Video Short explanation Abstraction 2.4 Capturing the essence of the behavior of interest (getting a model or representation) Action in the control Derivative 4.2 The control signal
AUTOMATION & MECHATRONIC SYSTEMS COURSE MODULES
 AUTOMATION & MECHATRONIC SYSTEMS COURSE MODULES A bionic arm, a self-driving car and an autopilot train system - these are some icons of the amazing world of automation technology that are brought about
AUTOMATION & MECHATRONIC SYSTEMS COURSE MODULES A bionic arm, a self-driving car and an autopilot train system - these are some icons of the amazing world of automation technology that are brought about
IVR: Introduction to Control
 IVR: Introduction to Control OVERVIEW Control systems Transformations Simple control algorithms History of control Centrifugal governor M. Boulton and J. Watt (1788) J. C. Maxwell (1868) On Governors.
IVR: Introduction to Control OVERVIEW Control systems Transformations Simple control algorithms History of control Centrifugal governor M. Boulton and J. Watt (1788) J. C. Maxwell (1868) On Governors.
ME375 Lab Project. Bradley Boane & Jeremy Bourque April 25, 2018
 ME375 Lab Project Bradley Boane & Jeremy Bourque April 25, 2018 Introduction: The goal of this project was to build and program a two-wheel robot that travels forward in a straight line for a distance
ME375 Lab Project Bradley Boane & Jeremy Bourque April 25, 2018 Introduction: The goal of this project was to build and program a two-wheel robot that travels forward in a straight line for a distance
BSNL TTA Question Paper Control Systems Specialization 2007
 BSNL TTA Question Paper Control Systems Specialization 2007 1. An open loop control system has its (a) control action independent of the output or desired quantity (b) controlling action, depending upon
BSNL TTA Question Paper Control Systems Specialization 2007 1. An open loop control system has its (a) control action independent of the output or desired quantity (b) controlling action, depending upon
Figure 1.1: Quanser Driving Simulator
 1 INTRODUCTION The Quanser HIL Driving Simulator (QDS) is a modular and expandable LabVIEW model of a car driving on a closed track. The model is intended as a platform for the development, implementation
1 INTRODUCTION The Quanser HIL Driving Simulator (QDS) is a modular and expandable LabVIEW model of a car driving on a closed track. The model is intended as a platform for the development, implementation
CDS 101: Lecture 1 Introduction to Feedback and Control. Richard M. Murray 30 September 2002
 1 CDS 101: Lecture 1 Introduction to Feedback and Control Richard M. Murray 30 September 2002 Goals: Define what a control system is and learn how to recognize its main features Describe what control systems
1 CDS 101: Lecture 1 Introduction to Feedback and Control Richard M. Murray 30 September 2002 Goals: Define what a control system is and learn how to recognize its main features Describe what control systems
Lecture 1 : Introduction to Control Engineering
 UCSI University Kuala Lumpur, Malaysia Faculty of Engineering Department of Mechatronics Lecture 1 Introduction to Control Engineering Mohd Sulhi bin Azman Lecturer Department of Mechatronics UCSI University
UCSI University Kuala Lumpur, Malaysia Faculty of Engineering Department of Mechatronics Lecture 1 Introduction to Control Engineering Mohd Sulhi bin Azman Lecturer Department of Mechatronics UCSI University
Laboratory Tutorial#1
 Laboratory Tutorial#1 1.1. Objective: To become familiar with the modules and how they operate. 1.2. Equipment Required: Following equipment is required to perform above task. Quantity Apparatus 1 OU150A
Laboratory Tutorial#1 1.1. Objective: To become familiar with the modules and how they operate. 1.2. Equipment Required: Following equipment is required to perform above task. Quantity Apparatus 1 OU150A
Control System Definition
 Control System Definition Introduction A control system consists of subsystems and processes (or plants) assembled for the purpose of obtaining a desired output with desired performance, given a specified
Control System Definition Introduction A control system consists of subsystems and processes (or plants) assembled for the purpose of obtaining a desired output with desired performance, given a specified
Introduction to MS150
 Introduction to MS150 Objective: To become familiar with the modules and how they operate. Equipment Required: Following equipment is required to perform above task. Quantity Apparatus 1 OU150A Operation
Introduction to MS150 Objective: To become familiar with the modules and how they operate. Equipment Required: Following equipment is required to perform above task. Quantity Apparatus 1 OU150A Operation
Modern Control System Theory and Design. Dr. Huang, Min Chemical Engineering Program Tongji University
 Modern Control System Theory and Design Dr. Huang, Min Chemical Engineering Program Tongji University Syllabus Instructor: Dr. Huang, Min Time and Place to meet Office Hours: Text Book and References Modern
Modern Control System Theory and Design Dr. Huang, Min Chemical Engineering Program Tongji University Syllabus Instructor: Dr. Huang, Min Time and Place to meet Office Hours: Text Book and References Modern
Analog circuit design ( )
") Silver Oak College of Engineering & Technology Department of Electronics and Communication 4 th Sem Mid semester-1(summer 2019) Syllabus Microprocessor & Interfacing (2141001) 1 Introduction To 8-bit Microprocessor
Silver Oak College of Engineering & Technology Department of Electronics and Communication 4 th Sem Mid semester-1(summer 2019) Syllabus Microprocessor & Interfacing (2141001) 1 Introduction To 8-bit Microprocessor
INTRODUCTION. Accelerator pedal, linkages and carburetter. Enginevehicle. Fig The basic control system.
 1 INTRODUCTION 1 INTRODUCTION 1.1 THE CONTROL SYSTEM The control system is that means by which any quantity of interest in a machine, mechanism or other equipment is maintained or altered in accordance
1 INTRODUCTION 1 INTRODUCTION 1.1 THE CONTROL SYSTEM The control system is that means by which any quantity of interest in a machine, mechanism or other equipment is maintained or altered in accordance
Automatic Control Systems
 Automatic Control Systems Lecture-1 Basic Concepts of Classical control Emam Fathy Department of Electrical and Control Engineering email: emfmz@yahoo.com 1 What is Control System? A system Controlling
Automatic Control Systems Lecture-1 Basic Concepts of Classical control Emam Fathy Department of Electrical and Control Engineering email: emfmz@yahoo.com 1 What is Control System? A system Controlling
Laboratory Tutorial#1
 Laboratory Tutorial#1 1.1. Objective: To become familiar with the modules and how they operate. 1.2. Equipment Required: Following equipment is required to perform above task. Quantity Apparatus 1 OU150A
Laboratory Tutorial#1 1.1. Objective: To become familiar with the modules and how they operate. 1.2. Equipment Required: Following equipment is required to perform above task. Quantity Apparatus 1 OU150A
DEGREE: Biomedical Engineering YEAR: TERM: 1
 COURSE: Control Engineering DEGREE: Biomedical Engineering YEAR: TERM: 1 La asignatura tiene 14 sesiones que se distribuyen a lo largo de 7 semanas. Los dos laboratorios puede situarse en cualquiera de
COURSE: Control Engineering DEGREE: Biomedical Engineering YEAR: TERM: 1 La asignatura tiene 14 sesiones que se distribuyen a lo largo de 7 semanas. Los dos laboratorios puede situarse en cualquiera de
Control Systems Overview REV II
 Control Systems Overview REV II D R. T A R E K A. T U T U N J I M E C H A C T R O N I C S Y S T E M D E S I G N P H I L A D E L P H I A U N I V E R S I T Y 2 0 1 4 Control Systems The control system is
Control Systems Overview REV II D R. T A R E K A. T U T U N J I M E C H A C T R O N I C S Y S T E M D E S I G N P H I L A D E L P H I A U N I V E R S I T Y 2 0 1 4 Control Systems The control system is
SYLLABUS. osmania university CHAPTER - 1 : CONTROL SYSTEMS CLASSIFICATION
 i SYLLABUS osmania university UNIT - I CHAPTER - 1 : CONTROL SYSTEMS CLASSIFICATION Open Loop and Closed Loop Systems, Mathematical Models and Transfer Functions from Governing Equations of Mechanical,
i SYLLABUS osmania university UNIT - I CHAPTER - 1 : CONTROL SYSTEMS CLASSIFICATION Open Loop and Closed Loop Systems, Mathematical Models and Transfer Functions from Governing Equations of Mechanical,
Fundamentals of Industrial Control
 Fundamentals of Industrial Control 2nd Edition D. A. Coggan, Editor Practical Guides for Measurement and Control Preface ix Contributors xi Chapter 1 Sensors 1 Applications of Instrumentation 1 Introduction
Fundamentals of Industrial Control 2nd Edition D. A. Coggan, Editor Practical Guides for Measurement and Control Preface ix Contributors xi Chapter 1 Sensors 1 Applications of Instrumentation 1 Introduction
ECE 382 Feedback Systems Analysis and Design
 ECE 382 Feedback Systems Analysis and Design Stan Żak School of Electrical and Computer Engineering Purdue University zak@purdue.edu August 20, 2012 1/49 Today s Class Instructor intro during the first
ECE 382 Feedback Systems Analysis and Design Stan Żak School of Electrical and Computer Engineering Purdue University zak@purdue.edu August 20, 2012 1/49 Today s Class Instructor intro during the first
DESIGN OF A TWO DIMENSIONAL MICROPROCESSOR BASED PARABOLIC ANTENNA CONTROLLER
 DESIGN OF A TWO DIMENSIONAL MICROPROCESSOR BASED PARABOLIC ANTENNA CONTROLLER Veysel Silindir, Haluk Gözde, Gazi University, Electrical And Electronics Engineering Department, Ankara, Turkey 4 th Main
DESIGN OF A TWO DIMENSIONAL MICROPROCESSOR BASED PARABOLIC ANTENNA CONTROLLER Veysel Silindir, Haluk Gözde, Gazi University, Electrical And Electronics Engineering Department, Ankara, Turkey 4 th Main
Types of control systems:
 Types of control systems: Control systems are classified into two general categories based upon the control action which is responsible to activate the system to produce the output viz. 1) Open loop control
Types of control systems: Control systems are classified into two general categories based upon the control action which is responsible to activate the system to produce the output viz. 1) Open loop control
COVENANT UNIVERSITY NIGERIA TUTORIAL KIT OMEGA SEMESTER PROGRAMME: MECHANICAL ENGINEERING
 COVENANT UNIVERSITY NIGERIA TUTORIAL KIT OMEGA SEMESTER PROGRAMME: MECHANICAL ENGINEERING COURSE: MCE 527 DISCLAIMER The contents of this document are intended for practice and leaning purposes at the
COVENANT UNIVERSITY NIGERIA TUTORIAL KIT OMEGA SEMESTER PROGRAMME: MECHANICAL ENGINEERING COURSE: MCE 527 DISCLAIMER The contents of this document are intended for practice and leaning purposes at the
Electrical Materials may be referred to a metal, dielectrics,electrical insulators or conductors,paramagnetic materials and many other.
 Electrical Engineering Paper-1 Syllabus : This part is for both objective and conventional types papers : 1) EM Theory- The electromagnetic force is said to be one of the fundamental interactions in nature
Electrical Engineering Paper-1 Syllabus : This part is for both objective and conventional types papers : 1) EM Theory- The electromagnetic force is said to be one of the fundamental interactions in nature
High Performance Computing
 High Performance Computing and the Smart Grid Roger L. King Mississippi State University rking@cavs.msstate.edu 11 th i PCGRID 26 28 March 2014 The Need for High Performance Computing High performance
High Performance Computing and the Smart Grid Roger L. King Mississippi State University rking@cavs.msstate.edu 11 th i PCGRID 26 28 March 2014 The Need for High Performance Computing High performance
AUTOMATIC VOLTAGE REGULATOR AND AUTOMATIC LOAD FREQUENCY CONTROL IN TWO-AREA POWER SYSTEM
 AUTOMATIC VOLTAGE REGULATOR AND AUTOMATIC LOAD FREQUENCY CONTROL IN TWO-AREA POWER SYSTEM ABSTRACT [1] Nitesh Thapa, [2] Nilu Murmu, [3] Aditya Narayan, [4] Birju Besra Dept. of Electrical and Electronics
AUTOMATIC VOLTAGE REGULATOR AND AUTOMATIC LOAD FREQUENCY CONTROL IN TWO-AREA POWER SYSTEM ABSTRACT [1] Nitesh Thapa, [2] Nilu Murmu, [3] Aditya Narayan, [4] Birju Besra Dept. of Electrical and Electronics
Introduction to Robotics
 Jianwei Zhang zhang@informatik.uni-hamburg.de Universität Hamburg Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 14. June 2013 J. Zhang 1 Robot Control
Jianwei Zhang zhang@informatik.uni-hamburg.de Universität Hamburg Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 14. June 2013 J. Zhang 1 Robot Control
DEPARTMENT OF ELECTRICAL AND ELECTRONIC ENGINEERING BANGLADESH UNIVERSITY OF ENGINEERING & TECHNOLOGY EEE 402 : CONTROL SYSTEMS SESSIONAL
 DEPARTMENT OF ELECTRICAL AND ELECTRONIC ENGINEERING BANGLADESH UNIVERSITY OF ENGINEERING & TECHNOLOGY EEE 402 : CONTROL SYSTEMS SESSIONAL Experiment No. 1(a) : Modeling of physical systems and study of
DEPARTMENT OF ELECTRICAL AND ELECTRONIC ENGINEERING BANGLADESH UNIVERSITY OF ENGINEERING & TECHNOLOGY EEE 402 : CONTROL SYSTEMS SESSIONAL Experiment No. 1(a) : Modeling of physical systems and study of
ELEC SIGNALS and SYSTEMS. Text Book:
 ELEC 321-001 SIGNALS and SYSTEMS PROF. KALYANA C. VELUVOLU IT1-817 Tel: 053-950-7232 E-mail: veluvolu@ee.knu.ac.kr http://ncbs.knu.ac.kr School of Electronics Engineering Kyungpook National University
ELEC 321-001 SIGNALS and SYSTEMS PROF. KALYANA C. VELUVOLU IT1-817 Tel: 053-950-7232 E-mail: veluvolu@ee.knu.ac.kr http://ncbs.knu.ac.kr School of Electronics Engineering Kyungpook National University
JNTUWORLD. 6 The unity feedback system whose open loop transfer function is given by G(s)=K/s(s 2 +6s+10) Determine: (i) Angles of asymptotes *****
=K/s(s 2 +6s+10) Determine: (i) Angles of asymptotes *****") Code: 9A050 III B. Tech I Semester (R09) Regular Eaminations, November 0 Time: hours Ma Marks: 70 (a) What is a mathematical model of a physical system? Eplain briefly. (b) Write the differential equations
Code: 9A050 III B. Tech I Semester (R09) Regular Eaminations, November 0 Time: hours Ma Marks: 70 (a) What is a mathematical model of a physical system? Eplain briefly. (b) Write the differential equations
HISTORY: How we got to where we are. March 2015 Roy Boyer 1
 HISTORY: How we got to where we are March 2015 Roy Boyer 1 Traditional Stability Analysis: 1. Maintain synchronism of synchronous machines 2. Simplifying assumptions: 1. Balanced positive sequence system
HISTORY: How we got to where we are March 2015 Roy Boyer 1 Traditional Stability Analysis: 1. Maintain synchronism of synchronous machines 2. Simplifying assumptions: 1. Balanced positive sequence system
Subject-wise Tests Tests will be activated at 06:00 pm on scheduled day
 Subject Name EE-01 Control Systems EE-02 Systems and Signal Processing EE-03 Analog and Digital Electronics EE-04 Engineering Mathematics and Numerical Analysis EE-05 Electric Circuits and Fields EE-06
Subject Name EE-01 Control Systems EE-02 Systems and Signal Processing EE-03 Analog and Digital Electronics EE-04 Engineering Mathematics and Numerical Analysis EE-05 Electric Circuits and Fields EE-06
Chapter 2 Mechatronics Disrupted
 Chapter 2 Mechatronics Disrupted Maarten Steinbuch 2.1 How It Started The field of mechatronics started in the 1970s when mechanical systems needed more accurate controlled motions. This forced both industry
Chapter 2 Mechatronics Disrupted Maarten Steinbuch 2.1 How It Started The field of mechatronics started in the 1970s when mechanical systems needed more accurate controlled motions. This forced both industry
Design of a Simulink-Based Control Workstation for Mobile Wheeled Vehicles with Variable-Velocity Differential Motor Drives
 Design of a Simulink-Based Control Workstation for Mobile Wheeled Vehicles with Variable-Velocity Differential Motor Drives Kevin Block, Timothy De Pasion, Benjamin Roos, Alexander Schmidt Gary Dempsey
Design of a Simulink-Based Control Workstation for Mobile Wheeled Vehicles with Variable-Velocity Differential Motor Drives Kevin Block, Timothy De Pasion, Benjamin Roos, Alexander Schmidt Gary Dempsey
ELECTRONIC FUNDAMENTALS
 Part 66 Cat. B1 Module 4 ELECTRONIC FUNDAMENTALS Vilnius-2017 Issue 1. Effective date 2017-02-28 FOR TRAINING PURPOSES ONLY Page 1 of 67 Figure 1-4. Standard diode color code system Color Digit Diode suffix
Part 66 Cat. B1 Module 4 ELECTRONIC FUNDAMENTALS Vilnius-2017 Issue 1. Effective date 2017-02-28 FOR TRAINING PURPOSES ONLY Page 1 of 67 Figure 1-4. Standard diode color code system Color Digit Diode suffix
Reduction of Multiple Subsystems
 Reduction of Multiple Subsystems Ref: Control System Engineering Norman Nise : Chapter 5 Chapter objectives : How to reduce a block diagram of multiple subsystems to a single block representing the transfer
Reduction of Multiple Subsystems Ref: Control System Engineering Norman Nise : Chapter 5 Chapter objectives : How to reduce a block diagram of multiple subsystems to a single block representing the transfer
An Overview of Linear Systems
 An Overview of Linear Systems The content from this course was hosted on TechOnline.com from 999-4. TechOnline.com is now targeting commercial clients, so the content, (without animation and voice) is
An Overview of Linear Systems The content from this course was hosted on TechOnline.com from 999-4. TechOnline.com is now targeting commercial clients, so the content, (without animation and voice) is
Applying Multisensor Information Fusion Technology to Develop an UAV Aircraft with Collision Avoidance Model
 Applying Multisensor Information Fusion Technology to Develop an UAV Aircraft with Collision Avoidance Model by Dr. Buddy H Jeun and John Younker Sensor Fusion Technology, LLC 4522 Village Springs Run
Applying Multisensor Information Fusion Technology to Develop an UAV Aircraft with Collision Avoidance Model by Dr. Buddy H Jeun and John Younker Sensor Fusion Technology, LLC 4522 Village Springs Run
Based on the ARM and PID Control Free Pendulum Balance System
 Available online at www.sciencedirect.com Procedia Engineering 29 (2012) 3491 3495 2012 International Workshop on Information and Electronics Engineering (IWIEE) Based on the ARM and PID Control Free Pendulum
Available online at www.sciencedirect.com Procedia Engineering 29 (2012) 3491 3495 2012 International Workshop on Information and Electronics Engineering (IWIEE) Based on the ARM and PID Control Free Pendulum
Applying Multisensor Information Fusion Technology to Develop an UAV Aircraft with Collision Avoidance Model
 1 Applying Multisensor Information Fusion Technology to Develop an UAV Aircraft with Collision Avoidance Model {Final Version with
1 Applying Multisensor Information Fusion Technology to Develop an UAV Aircraft with Collision Avoidance Model {Final Version with
Figure 2.1 a. Block diagram representation of a system; b. block diagram representation of an interconnection of subsystems
 1 Figure 2.1 a. Block diagram representation of a system; b. block diagram representation of an interconnection of subsystems 2 Table 2.1 Laplace transform table 3 Table 2.2 Laplace transform theorems
1 Figure 2.1 a. Block diagram representation of a system; b. block diagram representation of an interconnection of subsystems 2 Table 2.1 Laplace transform table 3 Table 2.2 Laplace transform theorems
Classical Control Design Guidelines & Tools (L10.2) Transfer Functions
 Transfer Functions") Classical Control Design Guidelines & Tools (L10.2) Douglas G. MacMartin Summarize frequency domain control design guidelines and approach Dec 4, 2013 D. G. MacMartin CDS 110a, 2013 1 Transfer Functions
Classical Control Design Guidelines & Tools (L10.2) Douglas G. MacMartin Summarize frequency domain control design guidelines and approach Dec 4, 2013 D. G. MacMartin CDS 110a, 2013 1 Transfer Functions
Bachelor of Science in Electrical Engineering Freshman Year
 Bachelor of Science in Electrical Engineering 2016-17 Freshman Year CHEM 1011 General Chemistry I Lab 1 ENG 1013 Composition II 3 CHEM 1013 General Chemistry I 3 ENGR 1412 Software Applications for Engineers
Bachelor of Science in Electrical Engineering 2016-17 Freshman Year CHEM 1011 General Chemistry I Lab 1 ENG 1013 Composition II 3 CHEM 1013 General Chemistry I 3 ENGR 1412 Software Applications for Engineers
COMPUTER SCIENCE AND ENGINEERING
 COMPUTER SCIENCE AND ENGINEERING Internet of Thing Cloud Computing Big Data Analytics Network Security Distributed System Image Processing Data Science Business Intelligence Wireless Sensor Network Artificial
COMPUTER SCIENCE AND ENGINEERING Internet of Thing Cloud Computing Big Data Analytics Network Security Distributed System Image Processing Data Science Business Intelligence Wireless Sensor Network Artificial
Design of Missile Two-Loop Auto-Pilot Pitch Using Root Locus
 International Journal Of Advances in Engineering and Management (IJAEM) Page 141 Volume 1, Issue 5, November - 214. Design of Missile Two-Loop Auto-Pilot Pitch Using Root Locus 1 Rami Ali Abdalla, 2 Muawia
International Journal Of Advances in Engineering and Management (IJAEM) Page 141 Volume 1, Issue 5, November - 214. Design of Missile Two-Loop Auto-Pilot Pitch Using Root Locus 1 Rami Ali Abdalla, 2 Muawia
Automatic Control Systems 2017 Spring Semester
 Automatic Control Systems 2017 Spring Semester Assignment Set 1 Dr. Kalyana C. Veluvolu Deadline: 11-APR - 16:00 hours @ IT1-815 1) Find the transfer function / for the following system using block diagram
Automatic Control Systems 2017 Spring Semester Assignment Set 1 Dr. Kalyana C. Veluvolu Deadline: 11-APR - 16:00 hours @ IT1-815 1) Find the transfer function / for the following system using block diagram
MANUFACTURING OF SERVO MOTORS
 Profile No.: 11 NIC Code: 29109 MANUFACTURING OF SERVO MOTORS 1. INTRODUCTION: Servo motors (or servos) are self-contained electric devices that rotate or push parts of a machine with great precision.
Profile No.: 11 NIC Code: 29109 MANUFACTURING OF SERVO MOTORS 1. INTRODUCTION: Servo motors (or servos) are self-contained electric devices that rotate or push parts of a machine with great precision.
Page ENSC387 - Introduction to Electro-Mechanical Sensors and Actuators: Simon Fraser University Engineering Science
 Motor Driver and Feedback Control: The feedback control system of a dc motor typically consists of a microcontroller, which provides drive commands (rotation and direction) to the driver. The driver is
Motor Driver and Feedback Control: The feedback control system of a dc motor typically consists of a microcontroller, which provides drive commands (rotation and direction) to the driver. The driver is
Audio System. Low Line Audio Component Location. Head Unit Audio Control Diagram
 Page 1 of 15 Published : May 20, 2005 Audio System Low Line Audio Component Location Item Part Number Description 1 - Audio control switches 2 - Screen antennas 3 - Antenna amplifier 4 - Rear LH (left-hand)
Page 1 of 15 Published : May 20, 2005 Audio System Low Line Audio Component Location Item Part Number Description 1 - Audio control switches 2 - Screen antennas 3 - Antenna amplifier 4 - Rear LH (left-hand)
HOLY ANGEL UNIVERSITY COLLEGE OF INFORMATION AND COMMUNICATIONS TECHNOLOGY ROBOT MODELING AND PROGRAMMING COURSE SYLLABUS
 HOLY ANGEL UNIVERSITY COLLEGE OF INFORMATION AND COMMUNICATIONS TECHNOLOGY ROBOT MODELING AND PROGRAMMING COURSE SYLLABUS Code : 6ROBOTMOD Prerequisite : 6ARTINTEL Credit : 3 s (3 hours LAB) Year Level:
HOLY ANGEL UNIVERSITY COLLEGE OF INFORMATION AND COMMUNICATIONS TECHNOLOGY ROBOT MODELING AND PROGRAMMING COURSE SYLLABUS Code : 6ROBOTMOD Prerequisite : 6ARTINTEL Credit : 3 s (3 hours LAB) Year Level:
Construction and signal filtering in Quadrotor
 Construction and signal filtering in Quadrotor Arkadiusz KUBACKI, Piotr OWCZAREK, Adam OWCZARKOWSKI*, Arkadiusz JAKUBOWSKI Institute of Mechanical Technology, *Institute of Control and Information Engineering,
Construction and signal filtering in Quadrotor Arkadiusz KUBACKI, Piotr OWCZAREK, Adam OWCZARKOWSKI*, Arkadiusz JAKUBOWSKI Institute of Mechanical Technology, *Institute of Control and Information Engineering,
The PID controller. Summary. Introduction to Control Systems
 The PID controller ISTTOK real-time AC 7-10-2010 Summary Introduction to Control Systems PID Controller PID Tuning Discrete-time Implementation The PID controller 2 Introduction to Control Systems Some
The PID controller ISTTOK real-time AC 7-10-2010 Summary Introduction to Control Systems PID Controller PID Tuning Discrete-time Implementation The PID controller 2 Introduction to Control Systems Some
Electrical Engineering. Control Systems. Comprehensive Theory with Solved Examples and Practice Questions. Publications
 Electrical Engineering Control Systems Comprehensive Theory with Solved Examples and Practice Questions Publications Publications MADE EASY Publications Corporate Office: 44-A/4, Kalu Sarai (Near Hauz
Electrical Engineering Control Systems Comprehensive Theory with Solved Examples and Practice Questions Publications Publications MADE EASY Publications Corporate Office: 44-A/4, Kalu Sarai (Near Hauz
Experiment 9. PID Controller
 Experiment 9 PID Controller Objective: - To be familiar with PID controller. - Noting how changing PID controller parameter effect on system response. Theory: The basic function of a controller is to execute
Experiment 9 PID Controller Objective: - To be familiar with PID controller. - Noting how changing PID controller parameter effect on system response. Theory: The basic function of a controller is to execute
Control Design for Servomechanisms July 2005, Glasgow Detailed Training Course Agenda
 Control Design for Servomechanisms 12 14 July 2005, Glasgow Detailed Training Course Agenda DAY 1 INTRODUCTION TO SYSTEMS AND MODELLING 9.00 Introduction The Need For Control - What Is Control? - Feedback
Control Design for Servomechanisms 12 14 July 2005, Glasgow Detailed Training Course Agenda DAY 1 INTRODUCTION TO SYSTEMS AND MODELLING 9.00 Introduction The Need For Control - What Is Control? - Feedback
Mobile Robots (Wheeled) (Take class notes)
 (Take class notes)") Mobile Robots (Wheeled) (Take class notes) Wheeled mobile robots Wheeled mobile platform controlled by a computer is called mobile robot in a broader sense Wheeled robots have a large scope of types and
Mobile Robots (Wheeled) (Take class notes) Wheeled mobile robots Wheeled mobile platform controlled by a computer is called mobile robot in a broader sense Wheeled robots have a large scope of types and
Comparative Study of PID and Fuzzy Controllers for Speed Control of DC Motor
 Comparative Study of PID and Fuzzy Controllers for Speed Control of DC Motor Osama Omer Adam Mohammed 1, Dr. Awadalla Taifor Ali 2 P.G. Student, Department of Control Engineering, Faculty of Engineering,
Comparative Study of PID and Fuzzy Controllers for Speed Control of DC Motor Osama Omer Adam Mohammed 1, Dr. Awadalla Taifor Ali 2 P.G. Student, Department of Control Engineering, Faculty of Engineering,
ELECTRICAL AND ELECTRONIC ENGINEERING COURSES
 ELECTRICAL AND ELECTRONIC ENGINEERING COURSES PH1012 PHYSICS A [Academic Units: 4.0 ; Pre-requisite: Nil ; Contact Hours: Lec: 39 hr ; Tut: 12 hrs] Vectors. Kinematics. Forces and torques. Newton s laws
ELECTRICAL AND ELECTRONIC ENGINEERING COURSES PH1012 PHYSICS A [Academic Units: 4.0 ; Pre-requisite: Nil ; Contact Hours: Lec: 39 hr ; Tut: 12 hrs] Vectors. Kinematics. Forces and torques. Newton s laws
LAB 5: Mobile robots -- Modeling, control and tracking
 LAB 5: Mobile robots -- Modeling, control and tracking Overview In this laboratory experiment, a wheeled mobile robot will be used to illustrate Modeling Independent speed control and steering Longitudinal
LAB 5: Mobile robots -- Modeling, control and tracking Overview In this laboratory experiment, a wheeled mobile robot will be used to illustrate Modeling Independent speed control and steering Longitudinal
JUNE 2014 Solved Question Paper
 JUNE 2014 Solved Question Paper 1 a: Explain with examples open loop and closed loop control systems. List merits and demerits of both. Jun. 2014, 10 Marks Open & Closed Loop System - Advantages & Disadvantages
JUNE 2014 Solved Question Paper 1 a: Explain with examples open loop and closed loop control systems. List merits and demerits of both. Jun. 2014, 10 Marks Open & Closed Loop System - Advantages & Disadvantages
Laboratory Experiences to Hands on
 Complementary Simulation i and Remote Laboratory Experiences to Hands on Control lsystems Curriculum Dr. Daniel Cox Professor of Mechanical Engineering g University of North Florida Jacksonville Florida
Complementary Simulation i and Remote Laboratory Experiences to Hands on Control lsystems Curriculum Dr. Daniel Cox Professor of Mechanical Engineering g University of North Florida Jacksonville Florida
Dr. Ashish Dutta. Professor, Dept. of Mechanical Engineering Indian Institute of Technology Kanpur, INDIA
 Introduction: History of Robotics - past, present and future Dr. Ashish Dutta Professor, Dept. of Mechanical Engineering Indian Institute of Technology Kanpur, INDIA Origin of Automation: replacing human
Introduction: History of Robotics - past, present and future Dr. Ashish Dutta Professor, Dept. of Mechanical Engineering Indian Institute of Technology Kanpur, INDIA Origin of Automation: replacing human
Today s meeting. Themes 2/7/2016. Instrumentation Technology INST 1010 Introduction to Process Control
 Instrumentation Technology INST 1010 Introduction to Basile Panoutsopoulos, Ph.D. CCRI Department of Engineering and Technology Engineering Physics II 1 Today s meeting Call Attendance Announcements Collect
Instrumentation Technology INST 1010 Introduction to Basile Panoutsopoulos, Ph.D. CCRI Department of Engineering and Technology Engineering Physics II 1 Today s meeting Call Attendance Announcements Collect
Course Objectives. This course gives a basic neural network architectures and learning rules.
 Introduction Course Objectives This course gives a basic neural network architectures and learning rules. Emphasis is placed on the mathematical analysis of these networks, on methods of training them
Introduction Course Objectives This course gives a basic neural network architectures and learning rules. Emphasis is placed on the mathematical analysis of these networks, on methods of training them
EC CONTROL SYSTEMS ENGINEERING
 1 YEAR / SEM: II / IV EC 1256. CONTROL SYSTEMS ENGINEERING UNIT I CONTROL SYSTEM MODELING PART-A 1. Define open loop and closed loop systems. 2. Define signal flow graph. 3. List the force-voltage analogous
1 YEAR / SEM: II / IV EC 1256. CONTROL SYSTEMS ENGINEERING UNIT I CONTROL SYSTEM MODELING PART-A 1. Define open loop and closed loop systems. 2. Define signal flow graph. 3. List the force-voltage analogous
Canadian Technology Accreditation Criteria (CTAC) INSTRUMENTATION ENGINEERING TECHNOLOGY - TECHNOLOGIST Technology Accreditation Canada (TAC)
 INSTRUMENTATION ENGINEERING TECHNOLOGY - TECHNOLOGIST Technology Accreditation Canada (TAC)") Canadian Technology Accreditation Criteria (CTAC) INSTRUMENTATION ENGINEERING TECHNOLOGY - TECHNOLOGIST Technology Accreditation Canada (TAC) Preamble These CTAC are applicable to programs having titles
Canadian Technology Accreditation Criteria (CTAC) INSTRUMENTATION ENGINEERING TECHNOLOGY - TECHNOLOGIST Technology Accreditation Canada (TAC) Preamble These CTAC are applicable to programs having titles
Affordable Real-Time Vision Guidance for Robot Motion Control
 Affordable Real-Time Vision Guidance for Robot Motion Control Cong Wang Assistant Professor ECE and MIE Departments New Jersey Institute of Technology Mobile: (510)529-6691 Office: (973)596-5744 Advanced
Affordable Real-Time Vision Guidance for Robot Motion Control Cong Wang Assistant Professor ECE and MIE Departments New Jersey Institute of Technology Mobile: (510)529-6691 Office: (973)596-5744 Advanced
Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators
 Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators Ahmed Okasha, Assistant Lecturer okasha1st@gmail.com Objective Have a
Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators Ahmed Okasha, Assistant Lecturer okasha1st@gmail.com Objective Have a
ACTUATORS AND SENSORS. Joint actuating system. Servomotors. Sensors
 ACTUATORS AND SENSORS Joint actuating system Servomotors Sensors JOINT ACTUATING SYSTEM Transmissions Joint motion low speeds high torques Spur gears change axis of rotation and/or translate application
ACTUATORS AND SENSORS Joint actuating system Servomotors Sensors JOINT ACTUATING SYSTEM Transmissions Joint motion low speeds high torques Spur gears change axis of rotation and/or translate application
Universal Controller
 7 863 Universal Controller POLYGYR RWF32... ISO 9001 RWF32... with casing ARG61.01 The RWF32... is a universal digital boiler temperature / pressure controller designed for use in oil- and / or gas-fired
7 863 Universal Controller POLYGYR RWF32... ISO 9001 RWF32... with casing ARG61.01 The RWF32... is a universal digital boiler temperature / pressure controller designed for use in oil- and / or gas-fired
Figure 1: Unity Feedback System. The transfer function of the PID controller looks like the following:
 Islamic University of Gaza Faculty of Engineering Electrical Engineering department Control Systems Design Lab Eng. Mohammed S. Jouda Eng. Ola M. Skeik Experiment 3 PID Controller Overview This experiment
Islamic University of Gaza Faculty of Engineering Electrical Engineering department Control Systems Design Lab Eng. Mohammed S. Jouda Eng. Ola M. Skeik Experiment 3 PID Controller Overview This experiment
Installation Tech Note Dallas, Texas
 AMC B40A40AC Installation Tech Note Dallas, Texas May, 2010 ! CAUTION! Do NOT apply air pressure to release the collet while the servo motor is rotating. The servo motor spindle must be FULLY STOPPED before
AMC B40A40AC Installation Tech Note Dallas, Texas May, 2010 ! CAUTION! Do NOT apply air pressure to release the collet while the servo motor is rotating. The servo motor spindle must be FULLY STOPPED before
Electrical and Automation Engineering, Fall 2018 Spring 2019, modules and courses inside modules.
 Electrical and Automation Engineering, Fall 2018 Spring 2019, modules and courses inside modules. Period 1: 27.8.2018 26.10.2018 MODULE INTRODUCTION TO AUTOMATION ENGINEERING This module introduces the
Electrical and Automation Engineering, Fall 2018 Spring 2019, modules and courses inside modules. Period 1: 27.8.2018 26.10.2018 MODULE INTRODUCTION TO AUTOMATION ENGINEERING This module introduces the
Robotic Vehicle Design
 Robotic Vehicle Design Actuators, control and interfacing Jim Keller July 19, 2005 What are actuators and Why are they needed? Computers/microprocessors are good at calculating what should be done to control
Robotic Vehicle Design Actuators, control and interfacing Jim Keller July 19, 2005 What are actuators and Why are they needed? Computers/microprocessors are good at calculating what should be done to control
M a r c h 7, Contact Hours = per week
 FE1012 PHYSICS A NEW [Academic Units: 4.0 ; Semester 1 ; Pre-requisite: Nil ; Contact Hours: Lec: 39 hr ; Tut: 12 hrs] Vectors. Kinematics. Forces and torques. Newton s laws of motion. Impulse and momentum.
FE1012 PHYSICS A NEW [Academic Units: 4.0 ; Semester 1 ; Pre-requisite: Nil ; Contact Hours: Lec: 39 hr ; Tut: 12 hrs] Vectors. Kinematics. Forces and torques. Newton s laws of motion. Impulse and momentum.
Medium Engine Room Simulator - MER3D
 Medium Engine Room Simulator - MER3D PC-based Engine Room Simulator MER3D Engine Room Simulator is based on the Bergen diesel (Rolls Royce) C25:33 engines, typical of the Workboat industry and of medium-sized
Medium Engine Room Simulator - MER3D PC-based Engine Room Simulator MER3D Engine Room Simulator is based on the Bergen diesel (Rolls Royce) C25:33 engines, typical of the Workboat industry and of medium-sized
FUNDAMENTALS ROBOT TECHNOLOGY. An Introduction to Industrial Robots, T eleoperators and Robot Vehicles. D J Todd. Kogan Page
 FUNDAMENTALS of ROBOT TECHNOLOGY An Introduction to Industrial Robots, T eleoperators and Robot Vehicles D J Todd &\ Kogan Page First published in 1986 by Kogan Page Ltd 120 Pentonville Road, London Nl
FUNDAMENTALS of ROBOT TECHNOLOGY An Introduction to Industrial Robots, T eleoperators and Robot Vehicles D J Todd &\ Kogan Page First published in 1986 by Kogan Page Ltd 120 Pentonville Road, London Nl
ARTIFICIAL INTELLIGENCE - ROBOTICS
 ARTIFICIAL INTELLIGENCE - ROBOTICS http://www.tutorialspoint.com/artificial_intelligence/artificial_intelligence_robotics.htm Copyright tutorialspoint.com Robotics is a domain in artificial intelligence
ARTIFICIAL INTELLIGENCE - ROBOTICS http://www.tutorialspoint.com/artificial_intelligence/artificial_intelligence_robotics.htm Copyright tutorialspoint.com Robotics is a domain in artificial intelligence
PERFORMANCE ANALYSIS OF PERMANENT MAGNET SYNCHRONOUS MOTOR WITH PI & FUZZY CONTROLLERS
 International Journal of Advanced Research in Biology Engineering Science and Technology (IJARBEST) Vol. 2, Special Issue 16, May 2016 PERFORMANCE ANALYSIS OF PERMANENT MAGNET SYNCHRONOUS MOTOR WITH PI
International Journal of Advanced Research in Biology Engineering Science and Technology (IJARBEST) Vol. 2, Special Issue 16, May 2016 PERFORMANCE ANALYSIS OF PERMANENT MAGNET SYNCHRONOUS MOTOR WITH PI
Modeling of Electro Mechanical Actuator with Inner Loop controller
 Modeling of Electro Mechanical Actuator with Inner Loop controller Patchigalla Vinay 1, P Mallikarjuna Rao 2 1PG scholar, Dept.of EEE, Andhra Universit(A),Visakhapatnam,India 2Professor, Dept.of EEE, Andhra
Modeling of Electro Mechanical Actuator with Inner Loop controller Patchigalla Vinay 1, P Mallikarjuna Rao 2 1PG scholar, Dept.of EEE, Andhra Universit(A),Visakhapatnam,India 2Professor, Dept.of EEE, Andhra
Automobile Prototype Servo Control
 IJIRST International Journal for Innovative Research in Science & Technology Volume 2 Issue 10 March 2016 ISSN (online): 2349-6010 Automobile Prototype Servo Control Mr. Linford William Fernandes Don Bosco
IJIRST International Journal for Innovative Research in Science & Technology Volume 2 Issue 10 March 2016 ISSN (online): 2349-6010 Automobile Prototype Servo Control Mr. Linford William Fernandes Don Bosco
The Human in Defense Systems
 The Human in Defense Systems Dr. Patrick Mason, Director Human Performance, Training, and BioSystems Directorate Office of the Assistant Secretary of Defense for Research and Engineering 4 Feb 2014 Outline
The Human in Defense Systems Dr. Patrick Mason, Director Human Performance, Training, and BioSystems Directorate Office of the Assistant Secretary of Defense for Research and Engineering 4 Feb 2014 Outline
Digital Control System Analysis and Design
 GLOBAL EDITION Digital Control System Analysis and Design FOURTH EDITION Charles L. Phillips H. Troy Nagle Aranya Chakrabortty Editorial Director, Engineering and Computer Science: Marcia J. Horton Executive
GLOBAL EDITION Digital Control System Analysis and Design FOURTH EDITION Charles L. Phillips H. Troy Nagle Aranya Chakrabortty Editorial Director, Engineering and Computer Science: Marcia J. Horton Executive
Motomatic Servo Control
 Exercise 2 Motomatic Servo Control This exercise will take two weeks. You will work in teams of two. 2.0 Prelab Read through this exercise in the lab manual. Using Appendix B as a reference, create a block
Exercise 2 Motomatic Servo Control This exercise will take two weeks. You will work in teams of two. 2.0 Prelab Read through this exercise in the lab manual. Using Appendix B as a reference, create a block