Rotary Motion Servo Plant: SRV02. Rotary Experiment #03: Speed Control. SRV02 Speed Control using QuaRC. Student Manual
|
|
|
- Tabitha Sullivan
- 6 years ago
- Views:
Transcription

1 Rotary Motion Servo Plant: SRV02 Rotary Experiment #03: Speed Control SRV02 Speed Control using QuaRC Student Manual
2 Table of Contents 1. INTRODUCTION PREREQUISITES OVERVIEW OF FILES PRE-LAB ASSIGNMENTS Desired Speed Control Response SRV02 Speed Control Specifications Overshoot Steady-state Error PI Control Design Closed-loop Transfer Function Finding PI Gains to Satisfy Specifications Lead Control Design Finding Lead Compensator Parameters Magnitude Bode Plot of Uncompensated System Phase Bode Plot of Uncompensated System Sensor Noise IN-LAB PROCEDURES Speed Control Simulation Setup for Speed Control Simulation Simulated PI Step Response Lead Compensator Design using Matlab Simulated Lead Step Response Speed Control Implementation Setup for Speed Control Implementation...37 Document Number 708 Revision 1.0 Page i
3 Implementation PI Speed Control Implementation Lead Speed Control Results Summary REFERENCES...46 Document Number 708 Revision 1.0 Page ii
4 1. Introduction The objective of this experiment is to develop a feedback system that controls the speed of the rotary servo load shaft. Both a proportional-integral (PI) controller and a lead compensator are designed to regulate the shaft speeds according to a set of specifications. The following topics are covered in this laboratory: Design a proportional-integral (PI) controller that regulates the angular rate of the servo load shaft according to certain time-domain requirements. Set-point weight. Design a lead compensator according to some time-domain and frequency-domain specifications. Simulate the PI and lead controllers using the developed model of the plant and ensure the specifications are met without any actuator saturation. Implement the controllers on the Quanser SRV02 device and evaluate its performance. 2. Prerequisites In order to successfully carry out this laboratory, the user should be familiar with the following: Data acquisition card (e.g. Q8), the power amplifier (e.g. UPM), and the main components of the SRV02 (e.g. actuator, sensors), as described in References [1], [4], and [5], respectively. Wiring and operating procedure of the SRV02 plant with the UPM and DAC device, as discussed in Reference [5]. Transfer function fundamentals, e.g. obtaining a transfer function from a differential equation. Laboratory described in Reference [6] in order to be familiar using QuaRC with the SRV02. Document Number 708 Revision 1.0 Page 1
5 3. Overview of Files Table 1 below lists and describes the various files supplied with the SRV02 Speed Control laboratory. File Name 03 SRV02 Speed Control Student Manual.pdf setup_srv02_exp03_spd.m config_srv02.m d_model_param.m Description This laboratory guide contains pre-lab and in-lab exercises demonstrating how to design and implement a speed controller on the Quanser SRV02 rotary plant using QuaRC. The main Matlab script that sets the SRV02 motor and sensor parameters as well as its configuration-dependent model parameters. Run this file only to setup the laboratory. Returns the configuration-based SRV02 model specifications Rm, kt, km, Kg, eta_g, Beq, Jeq, and eta_m, the sensor calibration constants K_POT, K_ENC, and K_TACH, and the UPM limits VMAX_UPM and IMAX_UPM. Calculates the SRV02 model parameters K and tau based on the device specifications Rm, kt, km, Kg, eta_g, Beq, Jeq, and eta_m. calc_conversion_constants.m Returns various conversions factors. s_srv02_spd.mdl q_srv02_spd.mdl Simulink file that simulates the closed-loop SRV02 speed control using either the PI control or the lead compensator. Simulink file that runs the PI or Lead speed control on the actual SRV02 system using QuaRC. Document Number 708 Revision 1.0 Page 2
6 File Name Description Table 1: Files supplied with the SRV02 Speed Control experiment. 4. Pre-Lab Assignments 4.1. Desired Speed Control Response Section outlines the specifications of the closed-loop system. Given a step input with a certain amplitude, the expected overshoot and steady-state error of the system are calculated in Section and Section 4.1.3, respectively SRV02 Speed Control Specifications The time-domain requirements for controlling the speed of the SRV02 load shaft are: = e ss 0, [1] Document Number 708 Revision 1.0 Page 3
7 t p 0.05[ s], and [2] PO 5[ "%"]. [3] Thus when tracking the load shaft reference, the transient response should have a peak time less than or equal to 0.05 seconds, an overshoot less than or equal to 5 %, and zero steady-state error. In addition to the above time-based specifications, the following frequency-domain requirements are to be met when designing the Lead compensator: 75.0 [ deg] PM, and [4] ω g = 75.0 [ rad ]. [5] The phase margin mainly affects the shape of the response. Having a higher phase margin implies that the system is more stable and the corresponding time response will have less overshoot. The overshoot will not go beyond 5% with a phase margin of at least 75.0 degrees. The crossover frequency is the frequency where the gain of the bode plot is 1 (or 0 db). This parameter mainly affects the speed of the response, thus having a larger ω g decreases the peak time. With a crossover frequency of 75.0 radians the resulting peak time will be less than or equal to 0.05 seconds Overshoot Consider the following step setpoint 2.5 rad s ω d ( t) = 7.5 rad s t < t0 t0 < t,. where t 0 is the time the step is applied, i.e. step time. Initially the SRV02 should be running at 2.5 rad/s and after the step time it should jump up to 7.5 rad/s. Calculate the maximum overshoot of the response (in radians) when the step is applied. [6] Document Number 708 Revision 1.0 Page 4
8 Steady-state Error The steady-state error when controlling the speed of the SRV02 is calculated in this section. Consider controlling the speed with a unity feedback system. This is illustrated in Figure 1 when the compensator is defined C( s) = 1. [7] Figure 1: Unity feedback loop. 1. As given in Reference [7], the SRV02 voltage-to-speed transfer function is K P( s) = [8] τ s + 1. Given the reference step R 0 R( s) = s find the steady-state error of the system using the final-value theorem [9] Document Number 708 Revision 1.0 Page 5
9 e ss = lim s 0 s E( s). [10] Make sure the error transfer function E(s) derivation is shown. 2. Evaluate the steady-state error numerically based on the model parameters obtained in Reference [7] and the step amplitude R 0 = 5.0 rad/s. Based on the steady-state error result from a step response with a unity proportional gain, what Type of system is the SRV02 when performing speed control (0, 1, 2, or 3)? Document Number 708 Revision 1.0 Page 6
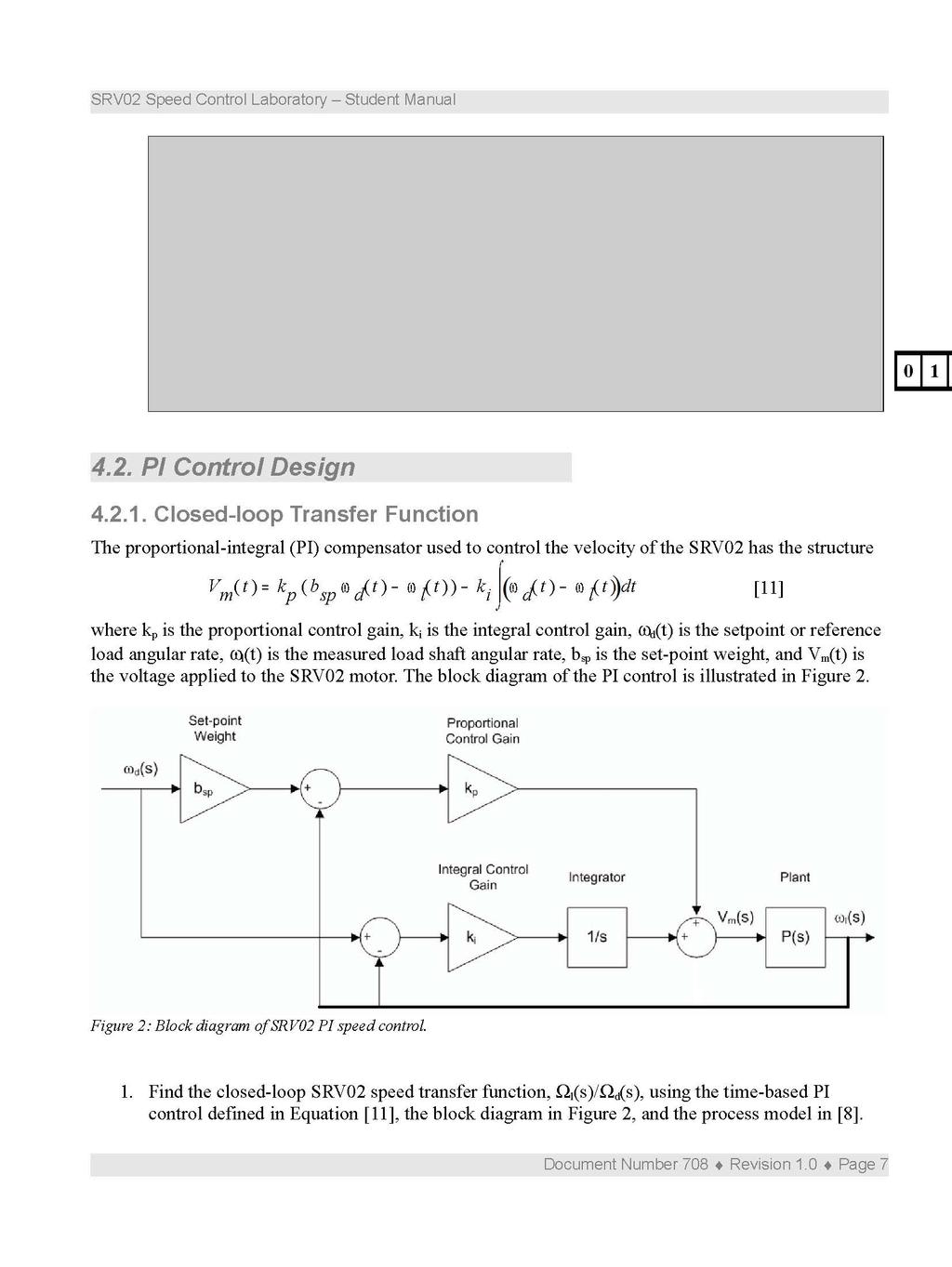
10
11 Assume the zero initial conditions, thus Ω l (0 - ) = Finding PI Gains to Satisfy Specifications Recall from Reference [8] that the percentage overshoot and peak time equations are π ζ 1 ζ 2 [12] PO = 100 e and π t p = ω n 1 ζ 2 [13]. 1. When the set-point weight is zero, i.e. b sp = 0, the closed-loop SRV02 speed transfer function has the structure of a standard second-order system. Similarly as done in Reference [8] for the PV gains, find expressions for the control gains k p and k i that equate the characteristic equation of the SRV02 closed-loop system to the standard characteristic equation s ζ ω n s + ω 2 n [14]. Document Number 708 Revision 1.0 Page 8
12 2. Compare the PI control gains needed to satisfy the speed control specifications with the PV gains found in Reference [8] to meet the position control requirements. Document Number 708 Revision 1.0 Page 9
13 3. Calculate the minimum damping ratio and natural frequency required to meet the specifications given in Section Based on the nominal SRV02 model parameters, K and τ, found in Experiment #1: SRV02 Modeling (Reference [7]), calculate the PI control gains needed to satisfy the time-domain response requirements. Document Number 708 Revision 1.0 Page 10
14 4.3. Lead Control Design Alternatively, a lead or lag compensator can be designed to control the speed of the servo. The lag compensator is actually an approximation of a PI control and this, at first, may seem like the more viable option. However, due to the saturation limits of the actuator the lag compensator cannot achieve the desired zero steady-state error specification, which is given in [1] of Section Instead a lead compensator with an integrator as shown in Figure 3 will be designed. Figure 3: Closed-loop SRV02 speed control with lead compensator. Document Number 708 Revision 1.0 Page 11
15 To obtain zero steady-state error, an integrator is placed in series with the plant. This system is denoted by the transfer function P( s) P i ( s) = [15] s where P(s) is the plant transfer function shown in [8]. The phase margin and crossover frequency specifications listed in [4]and[5] of Section can then be satisfied using a proportional gain K c and the lead transfer function 1 + a T s G lead ( s) = [16] 1 + T s. The a and T parameters change the location of the pole and the zero of the lead compensator which changes the gain and phase margins system. The stability margins of the compensated open-loop system L( s ) = C( s ) P( s). [17] is examined. This is called the loop transfer function and the complete compensator, which is used to control the angular rate of the SRV02 load gear, is defined K c ( 1 + a T s) C( s) = [18] ( 1 + T s) s Finding Lead Compensator Parameters The Lead compensator is an approximation of a proportional-derivative, or PD, control. Similarly when controlling the position of the SRV02 using a PV control as examined in Reference [8], a PD control can be used to dampen the overshoot in the transient of a step response and effectively make the system more stable, i.e. increase its phase margin. In this particular case, the lead compensator is designed for the following system: L p ( s) = K c P( s) s. [19] The proportional gain K c is designed to attain a certain crossover frequency. Increasing the gain crossover frequency essentially increases the bandwidth of the system which decreases the peak time in the transient response (i.e. makes the response faster). However, as will be shown, adding a gain K c > 1 makes the system less stable. The phase margin of the L p (s) system is therefore lower then the phase margin of the P i (s) system and this translates to having a large overshoot in the response. The lead compensator is used to dampen the overshoot and increase the overall stability of the system, i.e increase its phase margin. The frequency response of the lead compensator given in [16] is 1 + atω j G lead ( ω j) = 1 + T ω j. [20] Document Number 708 Revision 1.0 Page 12
16 and its corresponding magnitude and phase equations are and G lead ( ω j) = T 2 ω 2 a φ G = arctan( atω ) arctan( T ω ). 1 + T 2 ω 2 [20] [22] The bode of the lead compensator is illustrated in Figure 4. Figure 4: Bode of lead compensator. Here is an overview of how gain K c and the lead compensator parameters a and T are used to obtain the specified crossover frequency of 75.0 rad/s and the phase margin of 75.0 degrees: 1. Obtain a bode plot of the uncompensated P i (s) system to find how much gain K c is required to get a crossover frequency of 50.0 rad/s. The gain is not adjusted to yield the fully specified 75.0 rad/s because the lead compensator also adds gain to the system (as depicted in the magnitude bode plot of Figure 4) which raises the crossover frequency. 2. Generate a bode plot of the K c P i (s) system to find its phase margin and find out how much more phase is needed to get the required phase margin of 75.0 degrees. This determines what the Document Number 708 Revision 1.0 Page 13
17 maximum phase of the lead compensator, parameter φ m, should be. 3. Design a to get the necessary additional phase margin. The a parameter determines the maximum phase of the lead compensator, φ m, which is illustrated in Figure Determine the frequency where the maximum phase of the lead compensator should occur, shown in Figure 4 by the variable ω m. 5. Calculate parameter T based on the values of a and ω m. 6. Obtain a bode of the open-loop compensated system, L(s) = C(s)P(s), and ensure the crossover frequency and phase margin specifications are met. 7. Simulate the step response and ensure the time-domain requirements are met. The lead compensator has two parameters: a and T. To attain the maximum phase shown in Figure 4, φ m, the Lead compensator has to add 20log 10 (a) of gain. This is determined using the equation 1 + sin( φ m ) a = [23] 1 + sin( φ m ). As illustrated in Figure 4, the maximum phase occurs at the maximum phase frequency ω m. Using the equation 1 T = ω m a [24], parameter T is used to attain a certain maximum phase frequency. This changes where the Lead compensator breakpoint frequencies 1/(a*T) and 1/T shown in Figure 4 occur. The slope of the lead compensator gain changes at these frequencies. 1. Calculate how much gain, in db, the lead compensator has to contribute in order for a system to get an additional phase margin of 45 degrees. 2. Find the breakpoint frequencies 1/(a*T) and 1/T needed for the maximum phase of the lead Document Number 708 Revision 1.0 Page 14
18 compensator to occur at a frequency of 65.0 rad/s. 3. Show the derivation of Equation [24]. Thus show how to derive the frequency at which the maximum phase of the lead compensator occurs. Document Number 708 Revision 1.0 Page 15
19 4. The maximum phase is defined by the expression φ m = arctan( atω m ) arctan( T ω m ). [25] Using the derived maximum phase frequency and the trigonometric identity tan( x ) tan( y) tan( x + y) = [26] 1 + tan( x ) tan( y) show that the maximum phase equals a 1 tan( φ m ) = [27] 2 a. 5. Next, show how to derive the lead gain equation given in [23] from the exercises just completed and using the trigonometric identity sinx ( ) tan( x) = 1 sinx ( ) 2 [28]. Document Number 708 Revision 1.0 Page 16
20 Magnitude Bode Plot of Uncompensated System In this section the bode plot of the P i (s) system, i.e. the plant in series with an integrator, will be found. 1. Find the frequency response magnitude, P i (ω), of the transfer function P i (s) given in [15]. 2. The DC gain is the gain when the frequency is zero, i.e. ω = 0 rad/s. However, because of its integrator, P i (s) has a singularity at zero frequency and the DC gain is therefore not technically defined for this system. Instead, approximate the DC gain by using ω = 1 rad/s. Make sure the DC gain estimate is evaluated numerically in db using the nominal model parameters, K and τ, found in Reference [7]. Document Number 708 Revision 1.0 Page 17
21 3. The gain crossover frequency, ω g, is the frequency at which the gain of the system is 1 or 0 db. Express the crossover frequency symbolically in terms of the SRV02 model parameters and then evaluate the expression using the nominal SRV02 model parameters. 4. Determine the breakpoints of P i (ω). Breakpoints are the asymptotes of the system which affect the slope of the magnitude plot. In this system there are two pole breakpoints that change the rate at which the gain is attenuated. Denote the higher-frequency breakpoint by the variable ω c. Document Number 708 Revision 1.0 Page 18
22 5. Before drawing the bode magnitude plot, approximate the low-frequency gain of the system when ω < ω c and the high-frequency gain when ω > ω c. Breaking up the system into different frequency bands is especially useful when plotting the bode of more complex systems. Make sure the resulting equations are expressed in terms of the SRV02 model parameters and are also given in decibels. 6. Using the DC gain estimate, the gain crossover frequency, as well as the low and high-frequency gain approximations, draw the magnitude bode plot of the P i (s) system. Label the bode plot with the DC gain along with the crossover and breakpoint frequencies. Document Number 708 Revision 1.0 Page 19
23 Phase Bode Plot of Uncompensated System In this section the phase bode plot of the uncompensated system will be plotted. 1. Find the phase of the P i (s) system, φ p (ω). Document Number 708 Revision 1.0 Page 20
24 2. The phase margin is the amount of phase that is over -180 degrees when the gain is at 0 db, i.e. at the gain crossover frequency. It is a way of determining relatively stability. The more phase margin, the more stable a system is and this translates to having less overshoot in the timeresponse of the system. Calculate the phase margin, PM, of the system. 3. Plot the phase bode of system P i (s) and label where the gain crossover frequency occurs. Document Number 708 Revision 1.0 Page 21
25 4.4. Sensor Noise When using analog sensors such as a tachometer, there is often some inherent noise in the measured signal. In this section, the noise from the tachometer will be estimated. 1. The peak-to-peak noise of the measured SRV02 load gear signal can be calculated using 1 e ω = 100 K n ω l [29], where K n is the peak-to-peak ripple rating of the sensor and ω l is the speed of SRV02 load gear. Based on the ripple peak-to-peak specification of the tachometer given in Reference [5], calculate the amount of noise that is to be expected when the signal is running at 7.5 rad/s. Document Number 708 Revision 1.0 Page 22
26 2. Taking the noise into account, what is the maximum peak in the speed response that is to be expected? Show the equation used and evaluate the peak value as well as the corresponding maximum percentage overshoot. Document Number 708 Revision 1.0 Page 23
27 5. In-Lab Procedures Students are asked to simulate the closed-loop PI and Lead responses. Then, the PI and Lead controllers are implemented on the actual SRV02. Before going through these experiments, go through Section to configure the lab files according to your SRV02 setup Speed Control Simulation The s_srv02_pos Simulink diagram shown in Figure 5 is used to simulate the closed-loop speed response of the SRV02 when using either the PI or Lead controls. The SRV02 Model uses a Transfer Fcn block from the Simulink library to simulate the SRV02 system. The PI Compensator subsystem contains the PI control detailed in Section 4.2 and the Lead Compensator block has the compensator described in Section 4.3. Figure 5: Simulink diagram used to simulate the closed-loop SRV02 speed response. First, ensure the lab files and the Matlab workspace have been setup for the Speed Control simulation as described in Section Then, proceed to Section to perform the PI speed control simulation. In Section 5.1.3, the lead compensator is designed using Matlab and then the closed-loop speed response when using the lead control is simulated in Section Document Number 708 Revision 1.0 Page 24
28 Setup for Speed Control Simulation Follow these steps to configure the Matlab setup script and the Simulink diagram for the Speed Control simulation laboratory: 1. Load the Matlab software. 2. Browse through the Current Directory window in Matlab and find the folder that contains the SRV02 speed controller files, e.g. s_srv02_spd.mdl. 3. Double-click on the s_srv02_spd.mdl file to open the SRV02 Speed Control Simulation Simulink diagram shown in Figure Double-click on the setup_srv02_exp03_spd.m file to open the setup script for the position control Simulink models. 5. Configure setup script: The controllers will be ran on an SRV02 in the high-gear configuration with the disc load, as in Reference [7]. In order to simulate the SRV02 properly, make sure the script is setup to match this configuration, e.g. the EXT_GEAR_CONFIG should be set to 'HIGH' and the LOAD_TYPE should be set to 'DISC'. Also, ensure the ENCODER_TYPE, TACH_OPTION, K_CABLE, UPM_TYPE, and VMAX_DAC parameters are set according to the SRV02 system that is to be used in the laboratory. Next, set CONTROL_TYPE to 'MANUAL'. 6. Run the script by selecting the Debug Run item from the menu bar or clicking on the Run button in the tool bar. The messages shown in Text 1, below, should be generated in the Matlab Command Window. The correct model parameters are loaded but the control gains and related parameters loaded are default values that need to be changed. That is, the PI control gains are all set to zero, the lead compensator parameters a and T are both set to 1, and the compensator proportional gain K c is set to zero. SRV02 model parameters: K = 1.53 rad/s/v tau = s PI control gains: kp = 0 V/rad ki = 0 V/rad/s Lead compensator parameters: Kc = 0 V/rad/s 1/(a*T) = 1 rad/s 1/T = 1 rad/s Text 1: Display message shown in Matlab Command Window after running setup_srv02_exp03_spd.m Simulated PI Step Response The closed-loop step speed response of the SRV02 will be simulated to confirm that the designed PI control satisfies the specifications without saturating the motor. In addition, the affect of the set-point Document Number 708 Revision 1.0 Page 25
29 weight will be examined. Follow these steps to simulate the SRV02 PI speed response: 1. Enter the proportional and integral control gains found in Section The speed reference signal is to be a 0.4 Hz square wave that goes between 2.5 rad/s and 7.5 rad/s (i.e. between 23.9 rpm and 71.6 rpm). In the SRV02 Signal Generator block, set the Signal Type to square and the Frequency to 0.4 Hz. 2. In the Speed Control Simulink model, set the Amplitude (rad/s) gain block to 2.5 rad/s and the Offset (rad/s) block to 5.0 rad/s. 3. Set the Manual Switch to the upward position to activate the PI control. 4. Open the load shaft position scope, w_l (rad), and the motor input voltage scope, Vm (V). 5. Start the simulation. By default, the simulation runs for 5 seconds. The scopes should be displaying responses similar to figures 6 and 7. Note that in the w_l (rad) scope, the yellow trace is the setpoint position while the purple trace is the simulated speed (generated by the SRV02 Model block). Figure 6: Simulated PI speed response. Figure 7: Simulated PI motor input voltage. 6. Generate a Matlab figure showing the Simulated PI speed response and its input voltage and attach it to your report. After each simulation run, each scope automatically saves their response to a variable in the Matlab workspace. The w_l (rad) scope saves its response to the variable called data_spd and the Vm (V) scope saves its data to the data_vm variable. The data_spd variable has the following structure: data_spd(:,1) is the time vector, data_spd(:,2) is the setpoint, and data_spd(:,3) is the simulated angular speed. For the data_vm variable, data_vm(:,1) is the time and data_vm(:,2) is the simulated input voltage. Document Number 708 Revision 1.0 Page 26
30 7. Measure the steady-state error, the percentage overshoot, and the peak time of the simulated response. Does the response satisfy the specifications given in Section 4.1.1? Document Number 708 Revision 1.0 Page 27
31 8. If the specifications are satisfied without overloading the servo motor, proceed to the next section to simulate the lead response Lead Compensator Design using Matlab In this section, Matlab is used to design a lead compensator that will satisfy the frequency-based specifications given in Section Review the summarized design steps listed in Section 4.3. Follow these steps to design the lead compensator for the SRV02 speed response: 1. The bode plot of the open-loop uncompensated system, P i (s), must first be found. This was already done manually in Section 4.3 but Matlab will now be used. To generate the Bode of P i (s), enter the following commands in Matlab: % Plant transfer function P = tf([k],[tau 1]); % Integrator transfer function I = tf([1],[1 0]); % Plant with Integrator transfer function Pi = series(p,i); % Bode of Pi(s) figure(1) margin(pi); set (1,'name','Pi(s)'); Recall that the model parameter K and tau are already stored in the Matlab workspace (after running the setup_srv02_exp03_spd.m script). These parameters are used with the commands tf and series to create the P i (s) transfer function. The margin command generates a bode of the Document Number 708 Revision 1.0 Page 28
32 system and it lists the gain and phase stability margins as well as the phase and gain crossover frequencies. Attach the bode to your report and compare it with the bode done manually in Section Find how more gain is required such that the gain crossover frequency is 50.0 rad/s (use the ginput Matlab command). As already mentioned, the lead compensator adds gain to the system and will increases the phase as well. Therefore gain K c is not to be designed to meet the fully specified 75.0 rad/s. Generate a bode of the following loop transfer function Lp(s) defined in [19] to verify that the specified crossover frequency is achieved and attach it to your report. This also allows you to do any fine tuning to gain K c. Document Number 708 Revision 1.0 Page 29
33 3. Find the gain that the lead compensator needs to achieve the specified phase margin of 75 degrees. Give the amount in decibels. Also, to ensure the desired specifications are reached add another 5 degrees maximum phase of the lead. Document Number 708 Revision 1.0 Page 30
34 4. The frequency at which the lead maximum phase occurs must be placed at the new gain crossover frequency ω g, new. This is the crossover frequency after the lead compensator is applied. As illustrated in Figure 4, ω m occurs halfway between 0 db and 20Log 10 (a), i.e. at 10Log 10 (a). So the new gain crossover frequency in the L p (s) system will be the frequency where the gain is -10Log 10 (a). Find this frequency and calculate what lead compensator breakpoint frequencies are needed. Document Number 708 Revision 1.0 Page 31
35 5. Generate a bode of the lead compensator C lead (s), defined in [16]. Document Number 708 Revision 1.0 Page 32
36 6. Generate a bode of the loop transfer function L(s), as described in [17]. Does the phase margin and gain crossover frequency meet the specifications in Section 4.1.1? Document Number 708 Revision 1.0 Page 33
37 7. Go on to Section to simulate the step response and check whether the time-domain specifications are met. Keep it mind that the goal of the lead design is the same as the PI control, the response should meet the desired steady-state error, peak time, and percentage overshoot specifications given in Section Thus if the crossover frequency and/or phase margin specifications are not quite satisfied, the response should be simulated to verify if the time-domain requirements are satisfied. If so, then the design is complete. If not, then the lead design needs to be re-visited Simulated Lead Step Response The closed-loop step speed response of the SRV02 is simulated in order to verify that the time-based specifications in Section are met without saturating the motor. Document Number 708 Revision 1.0 Page 34
38 Follow these steps to simulate the SRV02 lead speed response: 1. Enter the K c, a, and T lead control parameters found in Section 5.1.3, above. 2. In the SRV02 Signal Generator block, set the Signal Type to square and the Frequency to 0.4 Hz. 3. In the Speed Control Simulink model, set the Amplitude (rad/s) gain block to 2.5 rad/s and the Offset (rad/s) constant block to 5.0 rad/s. 4. To engage the lead control, set the Manual Switch to the downward position. 5. Open the load shaft position scope, w_l (rad), and the motor input voltage scope, Vm (V). 6. Start the simulation. By default, the simulation runs for 5 seconds. The scopes should be displaying responses similar to figures 6 and Verify if the time-domain specifications in Section are satisfied and if the motor is being saturated. To calculate the steady-state error, peak time, and percentage overshoot, use the simulated response data stored in the data_spd variable. 8. If the specifications are not satisfied, go back in the lead compensator design. You may have to, for example, need to add more maximum phase in order to increase the phase margin. If the specifications are met, move on to the next step. 9. Generate a Matlab figure showing the Simulated Lead speed response and its input voltage and attach it to your report. Document Number 708 Revision 1.0 Page 35
39 5.2. Speed Control Implementation The q_srv02_spd Simulink diagram shown in Figure 8 is used to perform the speed control exercises in this laboratory. The SRV02-ET Speed subsystem contains QuaRC blocks that interface with the DC motor and sensors of the SRV02 system, as discussed in Reference [6]. The PI Control subsystem implements the PI control detailed in Section 4.2 and the Lead Compensator block implements the lead control described in Section 4.3. Document Number 708 Revision 1.0 Page 36
40 Figure 8: Simulink model used with QuaRC to run the PI and lead speed controllers on the SRV Setup for Speed Control Implementation Before beginning the in-lab exercises on the SRV02 device, the q_srv02_spd Simulink diagram and the setup_srv02_exp03_spd.m script must be configured. Follow these steps to get the system ready for this lab: 1. Setup the SRV02 in the high-gear configuration and with the disc load as described in Reference [5]. 2. Load the Matlab software. 3. Browse through the Current Directory window in Matlab and find the folder that contains the SRV02 speed control files, e.g. q_srv02_spd.mdl. 4. Double-click on the q_srv02_spd.mdl file to open the Speed Control Simulink diagram shown in Figure Configure DAQ: Double-click on the HIL Initialize block in the SRV02-ET subsystem (which is located inside the SRV02-ET Speed subsystem) and ensure it is configured for the DAQ Document Number 708 Revision 1.0 Page 37
41 device that is installed in your system. See Reference [6] for more information on configuring the HIL Initialize block. 6. Configure Sensor: To perform the speed control experiment, the angular rate of the load shaft should be measured using the tachometer. This has already been set in the Spd Src Source block inside the SRV02-ET Speed subsystem. 7. Configure setup script: Set the parameters in the setup_srv02_exp03_spd.m script according to your system setup. See Section for more details Implementation PI Speed Control In this lab, the angular rate of the SRV02 load shaft, i.e. the disc load, will be controlled using the developed PI control. Measurements will then be taken to ensure that the specifications are satisfied. Follow the steps below: 1. Run the setup_srv02_exp03_spd.m script. 2. Enter the proportional and integral control gains found in Section In the SRV02 Signal Generator block, set the Signal Type to square and the Frequency to 0.4 Hz. 4. In the Speed Control Simulink model, set the Amplitude (rad/s) gain block to 2.5 rad/s and the Offset (rad/s) constant block to 5.0 rad/s. 5. Open the load shaft speed scope, w_l (rad/s), and the motor input voltage scope, Vm (V). 6. Set the Manual Switch to the upward position to activate the PI control. 7. Click on QuaRC Build to compile the Simulink diagram. 8. Select QuaRC Start to begin running the controller. The scopes should be displaying responses similar to figures 9 and 10. Note that in the w_l (rad/s) scope, the yellow trace is the setpoint position while the purple trace is the measured position. Figure 9: Measured PI speed step response. Figure 10: PI motor input voltage. 9. When a suitable response is obtained, click on the Stop button in the Simulink diagram tool bar Document Number 708 Revision 1.0 Page 38
42 (or select QuaRC Stop from the menu) to stop running the code. Generate a Matlab figure showing the PI speed response and its input voltage. Attach it to your report. As in the s_srv02_spd Simulink diagram, when the controller is stopped each scope automatically saves their response to a variable in the Matlab workspace. Thus the theta_l (rad) scope saves its response to the data_spd variable and the Vm (V) scope saves its data to the data_vm variable. 10.Due to the noise in measured speed signal, it is difficult to obtain an accurate measurement of the specifications. In the Speed Control Simulink mode, set the Amplitude (rad) block to 0 rad/s and the Offset (rad) block to 7.5 rad/s in order to generate a constant speed reference of 7.5 rad/s. Generate a Matlab figure showing that illustrate the noise in the signal. Document Number 708 Revision 1.0 Page 39
43 11. Measure the peak-to-peak ripple found in the speed signal, e ω,meas, and compare it with the estimate in Section 4.4. Then, find the steady-state error by comparing the average of the measured signal with the desired speed. Is the steady-state error specification satisfied? Document Number 708 Revision 1.0 Page 40
44 12.Measure the percentage overshoot and the peak time of the SRV02 load gear step response. Taking into account the noise in the signal, does the response satisfy the specifications given in Section 4.1.1? 13. Make sure QuaRC is stopped. 14.Shut off the power of the UPM if no more experiments will be performed on the SRV02 in this session. Document Number 708 Revision 1.0 Page 41
45 Implementation Lead Speed Control In this section the speed of the SRV02 is controlled using the lead compensator. Measurements will then be taken to see if the specifications are satisfied. Follow the steps below: 1. Run the setup_srv02_exp03_spd.m script. 2. Enter the K c, a, and T, lead parameters found in Section n the SRV02 Signal Generator block, set the Signal Type to square and the Frequency to 0.4 Hz. 4. In the Speed Control Simulink model, set the Amplitude (rad/s) gain block to 2.5 rad/s and the Offset (rad/s) constant block to 5.0 rad/s. 5. To engage the lead compensator, set the Manual Switch in the Speed Control Simulink diagram to the downward position. 6. Open the load shaft speed scope, w_l (rad/s), and the motor input voltage scope, Vm (V). 7. Click on QuaRC Build to compile the Simulink diagram. 8. Select QuaRC Start to begin running the controller. The scopes should be displaying responses similar to figures 9 and When a suitable response is obtained, click on the Stop button in the Simulink diagram tool bar (or select QuaRC Stop from the menu) to stop running the code. Generate a Matlab figure showing the lead speed response and its input voltage. Attach it to your report. Document Number 708 Revision 1.0 Page 42
46 10.Measure the steady-state error, the percentage overshoot, and the peak time of the SRV02 load gear. For the steady-state error, it may be beneficial to give a constant reference and take its average as done in Section Does the response satisfy the specifications given in Section 4.1.1? Document Number 708 Revision 1.0 Page 43
47 11. Using both your simulation and implementation results, comment on any differences between the PI and lead controls. 12. Make sure QuaRC is stopped. 13.Shut off the power of the UPM if no more experiments will be performed on the SRV02 in this session. Document Number 708 Revision 1.0 Page 44
48 5.3. Results Summary Fill out Table 2, below, with the pre-laboratory and in-laboratory results obtained such as the designed PI gains, the designed lead parameters, the measured peak time, percentage overshoot, steady-state error from the simulated and measured step responses, and so on. Section Description Symbol Value Unit Pre-Lab: Finding PI Gains to Satisfy Specifications 4. Open-Loop Steady-State Gain K rad/(v.s) 4. Open-Loop Time Constant τ s 4. Proportional gain k p V/rad 4. Integral gain k i V.s/rad Pre-Lab: Magnitude Bode Plot of Uncompensated System 2. DC Gain Estimate of P i (s) P i (1) db 3. Gain crossover frequency ω g rad/s 4. Breakpoint frequencies rad/s Pre-Lab: Phase Bode Plot of Uncompensated System 2. Phase margin PM deg 4.4 Pre-Lab: Sensor Noise ω c rad/s 1. Peak-to-peak ripple e ω rad/s 2. Percentage overshoot with noise consideration PO % In-Lab: Simulated PI Step Response 8. Peak time t p s 8. Percentage overshoot PO % 8. Steady-state error e ss rad/s In-Lab: Lead Compensator Design using Matlab 1. Gain crossover frequency ω g rad/s 1. Phase margin PM deg 2. Compensator proportional gain K c V/rad 3. Lead gain parameter 20Log(a) db Document Number 708 Revision 1.0 Page 45
49 4. Lead frequencies 1/(a*T) rad/s 4. 1/T rad/s In-Lab: Simulated Lead Step Response 7. Peak time t p s 7. Percentage overshoot PO % 7. Steady-state error e ss rad/s In-Lab: Implementation PI Speed Control 11. Measured peak-to-peak ripple e ω,meas rad/s 11. Steady-state error e ss rad/s 12. Peak time t p s 12. Percentage overshoot PO % In-Lab: Implementation Lead Speed Control 9. Peak time t p s 9. Percentage overshoot PO % 9. Steady-state error e ss rad/s Table 2: SRV02 Experiment #3: Speed control results summary. 6. References [1] Quanser. DAQ User Manual. [2] Quanser. QuaRC User Manual (type doc quarc in Matlab to access). [3] Quanser. QuaRC Installation Manual. [4] Quanser. UPM User Manual. [5] Quanser. SRV02 User Manual. [6] Quanser. SRV02 QuaRC Integration Student Manual. [7] Quanser. Rotary Experiment #1: SRV02 Modeling Student Manual. [8] Quanser. Rotary Experiment #2: SRV02 Position Control Student Manual. Document Number 708 Revision 1.0 Page 46
Rotary Motion Servo Plant: SRV02. Rotary Experiment #02: Position Control. SRV02 Position Control using QuaRC. Student Manual
 Rotary Motion Servo Plant: SRV02 Rotary Experiment #02: Position Control SRV02 Position Control using QuaRC Student Manual Table of Contents 1. INTRODUCTION...1 2. PREREQUISITES...1 3. OVERVIEW OF FILES...2
Rotary Motion Servo Plant: SRV02 Rotary Experiment #02: Position Control SRV02 Position Control using QuaRC Student Manual Table of Contents 1. INTRODUCTION...1 2. PREREQUISITES...1 3. OVERVIEW OF FILES...2
Rotary Motion Servo Plant: SRV02. Rotary Experiment #17: 2D Ball Balancer. 2D Ball Balancer Control using QUARC. Instructor Manual
 Rotary Motion Servo Plant: SRV02 Rotary Experiment #17: 2D Ball Balancer 2D Ball Balancer Control using QUARC Instructor Manual Table of Contents 1. INTRODUCTION...1 2. PREREQUISITES...1 3. OVERVIEW OF
Rotary Motion Servo Plant: SRV02 Rotary Experiment #17: 2D Ball Balancer 2D Ball Balancer Control using QUARC Instructor Manual Table of Contents 1. INTRODUCTION...1 2. PREREQUISITES...1 3. OVERVIEW OF
Ball and Beam. Workbook BB01. Student Version
 Ball and Beam Workbook BB01 Student Version Quanser Inc. 2011 c 2011 Quanser Inc., All rights reserved. Quanser Inc. 119 Spy Court Markham, Ontario L3R 5H6 Canada info@quanser.com Phone: 1-905-940-3575
Ball and Beam Workbook BB01 Student Version Quanser Inc. 2011 c 2011 Quanser Inc., All rights reserved. Quanser Inc. 119 Spy Court Markham, Ontario L3R 5H6 Canada info@quanser.com Phone: 1-905-940-3575
SRV02-Series Rotary Experiment # 3. Ball & Beam. Student Handout
 SRV02-Series Rotary Experiment # 3 Ball & Beam Student Handout SRV02-Series Rotary Experiment # 3 Ball & Beam Student Handout 1. Objectives The objective in this experiment is to design a controller for
SRV02-Series Rotary Experiment # 3 Ball & Beam Student Handout SRV02-Series Rotary Experiment # 3 Ball & Beam Student Handout 1. Objectives The objective in this experiment is to design a controller for
MEM01: DC-Motor Servomechanism
 MEM01: DC-Motor Servomechanism Interdisciplinary Automatic Controls Laboratory - ME/ECE/CHE 389 February 5, 2016 Contents 1 Introduction and Goals 1 2 Description 2 3 Modeling 2 4 Lab Objective 5 5 Model
MEM01: DC-Motor Servomechanism Interdisciplinary Automatic Controls Laboratory - ME/ECE/CHE 389 February 5, 2016 Contents 1 Introduction and Goals 1 2 Description 2 3 Modeling 2 4 Lab Objective 5 5 Model
Course Outline. Time vs. Freq. Domain Analysis. Frequency Response. Amme 3500 : System Dynamics & Control. Design via Frequency Response
 Course Outline Amme 35 : System Dynamics & Control Design via Frequency Response Week Date Content Assignment Notes Mar Introduction 2 8 Mar Frequency Domain Modelling 3 5 Mar Transient Performance and
Course Outline Amme 35 : System Dynamics & Control Design via Frequency Response Week Date Content Assignment Notes Mar Introduction 2 8 Mar Frequency Domain Modelling 3 5 Mar Transient Performance and
Sfwr Eng/TRON 3DX4, Lab 4 Introduction to Computer Based Control
 Announcements: Sfwr Eng/TRON 3DX4, Lab 4 Introduction to Computer Based Control First lab Week of: Mar. 10, 014 Demo Due Week of: End of Lab Period, Mar. 17, 014 Assignment #4 posted: Tue Mar. 0, 014 This
Announcements: Sfwr Eng/TRON 3DX4, Lab 4 Introduction to Computer Based Control First lab Week of: Mar. 10, 014 Demo Due Week of: End of Lab Period, Mar. 17, 014 Assignment #4 posted: Tue Mar. 0, 014 This
MCE441/541 Midterm Project Position Control of Rotary Servomechanism
 MCE441/541 Midterm Project Position Control of Rotary Servomechanism DUE: 11/08/2011 This project counts both as Homework 4 and 50 points of the second midterm exam 1 System Description A servomechanism
MCE441/541 Midterm Project Position Control of Rotary Servomechanism DUE: 11/08/2011 This project counts both as Homework 4 and 50 points of the second midterm exam 1 System Description A servomechanism
Linear Motion Servo Plants: IP01 or IP02. Linear Experiment #0: Integration with WinCon. IP01 and IP02. Student Handout
 Linear Motion Servo Plants: IP01 or IP02 Linear Experiment #0: Integration with WinCon IP01 and IP02 Student Handout Table of Contents 1. Objectives...1 2. Prerequisites...1 3. References...1 4. Experimental
Linear Motion Servo Plants: IP01 or IP02 Linear Experiment #0: Integration with WinCon IP01 and IP02 Student Handout Table of Contents 1. Objectives...1 2. Prerequisites...1 3. References...1 4. Experimental
Compensation of a position servo
 UPPSALA UNIVERSITY SYSTEMS AND CONTROL GROUP CFL & BC 9610, 9711 HN & PSA 9807, AR 0412, AR 0510, HN 2006-08 Automatic Control Compensation of a position servo Abstract The angular position of the shaft
UPPSALA UNIVERSITY SYSTEMS AND CONTROL GROUP CFL & BC 9610, 9711 HN & PSA 9807, AR 0412, AR 0510, HN 2006-08 Automatic Control Compensation of a position servo Abstract The angular position of the shaft
GE420 Laboratory Assignment 8 Positioning Control of a Motor Using PD, PID, and Hybrid Control
 GE420 Laboratory Assignment 8 Positioning Control of a Motor Using PD, PID, and Hybrid Control Goals for this Lab Assignment: 1. Design a PD discrete control algorithm to allow the closed-loop combination
GE420 Laboratory Assignment 8 Positioning Control of a Motor Using PD, PID, and Hybrid Control Goals for this Lab Assignment: 1. Design a PD discrete control algorithm to allow the closed-loop combination
EE 461 Experiment #1 Digital Control of DC Servomotor
 EE 461 Experiment #1 Digital Control of DC Servomotor 1 Objectives The objective of this lab is to introduce to the students the design and implementation of digital control. The digital control is implemented
EE 461 Experiment #1 Digital Control of DC Servomotor 1 Objectives The objective of this lab is to introduce to the students the design and implementation of digital control. The digital control is implemented
MTE 360 Automatic Control Systems University of Waterloo, Department of Mechanical & Mechatronics Engineering
 MTE 36 Automatic Control Systems University of Waterloo, Department of Mechanical & Mechatronics Engineering Laboratory #1: Introduction to Control Engineering In this laboratory, you will become familiar
MTE 36 Automatic Control Systems University of Waterloo, Department of Mechanical & Mechatronics Engineering Laboratory #1: Introduction to Control Engineering In this laboratory, you will become familiar
ECE317 Homework 7. where
 ECE317 Homework 7 Problem 1: Consider a system with loop gain, T(s), given by: where T(s) = 300(1+s)(1+ s 40 ) 1) Determine whether the system is stable by finding the closed loop poles of the system using
ECE317 Homework 7 Problem 1: Consider a system with loop gain, T(s), given by: where T(s) = 300(1+s)(1+ s 40 ) 1) Determine whether the system is stable by finding the closed loop poles of the system using
Lab 2: Introduction to Real Time Workshop
 Lab 2: Introduction to Real Time Workshop 1 Introduction In this lab, you will be introduced to the experimental equipment. What you learn in this lab will be essential in each subsequent lab. Document
Lab 2: Introduction to Real Time Workshop 1 Introduction In this lab, you will be introduced to the experimental equipment. What you learn in this lab will be essential in each subsequent lab. Document
EEL2216 Control Theory CT2: Frequency Response Analysis
 EEL2216 Control Theory CT2: Frequency Response Analysis 1. Objectives (i) To analyse the frequency response of a system using Bode plot. (ii) To design a suitable controller to meet frequency domain and
EEL2216 Control Theory CT2: Frequency Response Analysis 1. Objectives (i) To analyse the frequency response of a system using Bode plot. (ii) To design a suitable controller to meet frequency domain and
Lecture 7:Examples using compensators
 Lecture :Examples using compensators Venkata Sonti Department of Mechanical Engineering Indian Institute of Science Bangalore, India, This draft: March, 8 Example :Spring Mass Damper with step input Consider
Lecture :Examples using compensators Venkata Sonti Department of Mechanical Engineering Indian Institute of Science Bangalore, India, This draft: March, 8 Example :Spring Mass Damper with step input Consider
Laboratory Assignment 5 Digital Velocity and Position control of a D.C. motor
 Laboratory Assignment 5 Digital Velocity and Position control of a D.C. motor 2.737 Mechatronics Dept. of Mechanical Engineering Massachusetts Institute of Technology Cambridge, MA0239 Topics Motor modeling
Laboratory Assignment 5 Digital Velocity and Position control of a D.C. motor 2.737 Mechatronics Dept. of Mechanical Engineering Massachusetts Institute of Technology Cambridge, MA0239 Topics Motor modeling
5 Lab 5: Position Control Systems - Week 2
 5 Lab 5: Position Control Systems - Week 2 5.7 Introduction In this lab, you will convert the DC motor to an electromechanical positioning actuator by properly designing and implementing a proportional
5 Lab 5: Position Control Systems - Week 2 5.7 Introduction In this lab, you will convert the DC motor to an electromechanical positioning actuator by properly designing and implementing a proportional
Dr Ian R. Manchester
 Week Content Notes 1 Introduction 2 Frequency Domain Modelling 3 Transient Performance and the s-plane 4 Block Diagrams 5 Feedback System Characteristics Assign 1 Due 6 Root Locus 7 Root Locus 2 Assign
Week Content Notes 1 Introduction 2 Frequency Domain Modelling 3 Transient Performance and the s-plane 4 Block Diagrams 5 Feedback System Characteristics Assign 1 Due 6 Root Locus 7 Root Locus 2 Assign
EE 3TP4: Signals and Systems Lab 5: Control of a Servomechanism
 EE 3TP4: Signals and Systems Lab 5: Control of a Servomechanism Tim Davidson Ext. 27352 davidson@mcmaster.ca Objective To identify the plant model of a servomechanism, and explore the trade-off between
EE 3TP4: Signals and Systems Lab 5: Control of a Servomechanism Tim Davidson Ext. 27352 davidson@mcmaster.ca Objective To identify the plant model of a servomechanism, and explore the trade-off between
2.737 Mechatronics Laboratory Assignment 1: Servomotor Control
 2.737 Mechatronics Laboratory Assignment 1: Servomotor Control Assigned: Session 4 Reports due: Session 8 in checkoffs Reading: Simulink Text or online manual, Feedback system notes, Ch. 3-6 [1ex] 1 Lab
2.737 Mechatronics Laboratory Assignment 1: Servomotor Control Assigned: Session 4 Reports due: Session 8 in checkoffs Reading: Simulink Text or online manual, Feedback system notes, Ch. 3-6 [1ex] 1 Lab
PID Control with Derivative Filtering and Integral Anti-Windup for a DC Servo
 PID Control with Derivative Filtering and Integral Anti-Windup for a DC Servo Nicanor Quijano and Kevin M. Passino The Ohio State University Department of Electrical Engineering 2015 Neil Avenue, Columbus
PID Control with Derivative Filtering and Integral Anti-Windup for a DC Servo Nicanor Quijano and Kevin M. Passino The Ohio State University Department of Electrical Engineering 2015 Neil Avenue, Columbus
Frequency Response Analysis and Design Tutorial
 1 of 13 1/11/2011 5:43 PM Frequency Response Analysis and Design Tutorial I. Bode plots [ Gain and phase margin Bandwidth frequency Closed loop response ] II. The Nyquist diagram [ Closed loop stability
1 of 13 1/11/2011 5:43 PM Frequency Response Analysis and Design Tutorial I. Bode plots [ Gain and phase margin Bandwidth frequency Closed loop response ] II. The Nyquist diagram [ Closed loop stability
Root Locus Design. by Martin Hagan revised by Trevor Eckert 1 OBJECTIVE
 TAKE HOME LABS OKLAHOMA STATE UNIVERSITY Root Locus Design by Martin Hagan revised by Trevor Eckert 1 OBJECTIVE The objective of this experiment is to design a feedback control system for a motor positioning
TAKE HOME LABS OKLAHOMA STATE UNIVERSITY Root Locus Design by Martin Hagan revised by Trevor Eckert 1 OBJECTIVE The objective of this experiment is to design a feedback control system for a motor positioning
Ver. 4/5/2002, 1:11 PM 1
 Mechatronics II Laboratory Exercise 6 PID Design The purpose of this exercise is to study the effects of a PID controller on a motor-load system. Although not a second-order system, a PID controlled motor-load
Mechatronics II Laboratory Exercise 6 PID Design The purpose of this exercise is to study the effects of a PID controller on a motor-load system. Although not a second-order system, a PID controlled motor-load
The Discussion of this exercise covers the following points: Angular position control block diagram and fundamentals. Power amplifier 0.
 Exercise 6 Motor Shaft Angular Position Control EXERCISE OBJECTIVE When you have completed this exercise, you will be able to associate the pulses generated by a position sensing incremental encoder with
Exercise 6 Motor Shaft Angular Position Control EXERCISE OBJECTIVE When you have completed this exercise, you will be able to associate the pulses generated by a position sensing incremental encoder with
CDS 101/110a: Lecture 8-1 Frequency Domain Design
 CDS 11/11a: Lecture 8-1 Frequency Domain Design Richard M. Murray 17 November 28 Goals: Describe canonical control design problem and standard performance measures Show how to use loop shaping to achieve
CDS 11/11a: Lecture 8-1 Frequency Domain Design Richard M. Murray 17 November 28 Goals: Describe canonical control design problem and standard performance measures Show how to use loop shaping to achieve
Experiment 9. PID Controller
 Experiment 9 PID Controller Objective: - To be familiar with PID controller. - Noting how changing PID controller parameter effect on system response. Theory: The basic function of a controller is to execute
Experiment 9 PID Controller Objective: - To be familiar with PID controller. - Noting how changing PID controller parameter effect on system response. Theory: The basic function of a controller is to execute
SECTION 6: ROOT LOCUS DESIGN
 SECTION 6: ROOT LOCUS DESIGN MAE 4421 Control of Aerospace & Mechanical Systems 2 Introduction Introduction 3 Consider the following unity feedback system 3 433 Assume A proportional controller Design
SECTION 6: ROOT LOCUS DESIGN MAE 4421 Control of Aerospace & Mechanical Systems 2 Introduction Introduction 3 Consider the following unity feedback system 3 433 Assume A proportional controller Design
Loop Design. Chapter Introduction
 Chapter 8 Loop Design 8.1 Introduction This is the first Chapter that deals with design and we will therefore start by some general aspects on design of engineering systems. Design is complicated because
Chapter 8 Loop Design 8.1 Introduction This is the first Chapter that deals with design and we will therefore start by some general aspects on design of engineering systems. Design is complicated because
GE 320: Introduction to Control Systems
 GE 320: Introduction to Control Systems Laboratory Section Manual 1 Welcome to GE 320.. 1 www.softbankrobotics.com 1 1 Introduction This section summarizes the course content and outlines the general procedure
GE 320: Introduction to Control Systems Laboratory Section Manual 1 Welcome to GE 320.. 1 www.softbankrobotics.com 1 1 Introduction This section summarizes the course content and outlines the general procedure
ME 5281 Fall Homework 8 Due: Wed. Nov. 4th; start of class.
 ME 5281 Fall 215 Homework 8 Due: Wed. Nov. 4th; start of class. Reading: Chapter 1 Part A: Warm Up Problems w/ Solutions (graded 4%): A.1 Non-Minimum Phase Consider the following variations of a system:
ME 5281 Fall 215 Homework 8 Due: Wed. Nov. 4th; start of class. Reading: Chapter 1 Part A: Warm Up Problems w/ Solutions (graded 4%): A.1 Non-Minimum Phase Consider the following variations of a system:
Lab 2: Quanser Hardware and Proportional Control
 I. Objective The goal of this lab is: Lab 2: Quanser Hardware and Proportional Control a. Familiarize students with Quanser's QuaRC tools and the Q4 data acquisition board. b. Derive and understand a model
I. Objective The goal of this lab is: Lab 2: Quanser Hardware and Proportional Control a. Familiarize students with Quanser's QuaRC tools and the Q4 data acquisition board. b. Derive and understand a model
DEPARTMENT OF ELECTRICAL AND ELECTRONIC ENGINEERING BANGLADESH UNIVERSITY OF ENGINEERING & TECHNOLOGY EEE 402 : CONTROL SYSTEMS SESSIONAL
 DEPARTMENT OF ELECTRICAL AND ELECTRONIC ENGINEERING BANGLADESH UNIVERSITY OF ENGINEERING & TECHNOLOGY EEE 402 : CONTROL SYSTEMS SESSIONAL Experiment No. 1(a) : Modeling of physical systems and study of
DEPARTMENT OF ELECTRICAL AND ELECTRONIC ENGINEERING BANGLADESH UNIVERSITY OF ENGINEERING & TECHNOLOGY EEE 402 : CONTROL SYSTEMS SESSIONAL Experiment No. 1(a) : Modeling of physical systems and study of
Position Control of DC Motor by Compensating Strategies
 Position Control of DC Motor by Compensating Strategies S Prem Kumar 1 J V Pavan Chand 1 B Pangedaiah 1 1. Assistant professor of Laki Reddy Balireddy College Of Engineering, Mylavaram Abstract - As the
Position Control of DC Motor by Compensating Strategies S Prem Kumar 1 J V Pavan Chand 1 B Pangedaiah 1 1. Assistant professor of Laki Reddy Balireddy College Of Engineering, Mylavaram Abstract - As the
and using the step routine on the closed loop system shows the step response to be less than the maximum allowed 20%.
 Phase (deg); Magnitude (db) 385 Bode Diagrams 8 Gm = Inf, Pm=59.479 deg. (at 62.445 rad/sec) 6 4 2-2 -4-6 -8-1 -12-14 -16-18 1-1 1 1 1 1 2 1 3 and using the step routine on the closed loop system shows
Phase (deg); Magnitude (db) 385 Bode Diagrams 8 Gm = Inf, Pm=59.479 deg. (at 62.445 rad/sec) 6 4 2-2 -4-6 -8-1 -12-14 -16-18 1-1 1 1 1 1 2 1 3 and using the step routine on the closed loop system shows
Lecture 2 Exercise 1a. Lecture 2 Exercise 1b
 Lecture 2 Exercise 1a 1 Design a converter that converts a speed of 60 miles per hour to kilometers per hour. Make the following format changes to your blocks: All text should be displayed in bold. Constant
Lecture 2 Exercise 1a 1 Design a converter that converts a speed of 60 miles per hour to kilometers per hour. Make the following format changes to your blocks: All text should be displayed in bold. Constant
Open Loop Frequency Response
 TAKE HOME LABS OKLAHOMA STATE UNIVERSITY Open Loop Frequency Response by Carion Pelton 1 OBJECTIVE This experiment will reinforce your understanding of the concept of frequency response. As part of the
TAKE HOME LABS OKLAHOMA STATE UNIVERSITY Open Loop Frequency Response by Carion Pelton 1 OBJECTIVE This experiment will reinforce your understanding of the concept of frequency response. As part of the
Design of Compensator for Dynamical System
 Design of Compensator for Dynamical System Ms.Saroja S. Chavan PimpriChinchwad College of Engineering, Pune Prof. A. B. Patil PimpriChinchwad College of Engineering, Pune ABSTRACT New applications of dynamical
Design of Compensator for Dynamical System Ms.Saroja S. Chavan PimpriChinchwad College of Engineering, Pune Prof. A. B. Patil PimpriChinchwad College of Engineering, Pune ABSTRACT New applications of dynamical
Lab 1: Steady State Error and Step Response MAE 433, Spring 2012
 Lab 1: Steady State Error and Step Response MAE 433, Spring 2012 Instructors: Prof. Rowley, Prof. Littman AIs: Brandt Belson, Jonathan Tu Technical staff: Jonathan Prévost Princeton University Feb. 14-17,
Lab 1: Steady State Error and Step Response MAE 433, Spring 2012 Instructors: Prof. Rowley, Prof. Littman AIs: Brandt Belson, Jonathan Tu Technical staff: Jonathan Prévost Princeton University Feb. 14-17,
EE 482 : CONTROL SYSTEMS Lab Manual
 University of Bahrain College of Engineering Dept. of Electrical and Electronics Engineering EE 482 : CONTROL SYSTEMS Lab Manual Dr. Ebrahim Al-Gallaf Assistance Professor of Intelligent Control and Robotics
University of Bahrain College of Engineering Dept. of Electrical and Electronics Engineering EE 482 : CONTROL SYSTEMS Lab Manual Dr. Ebrahim Al-Gallaf Assistance Professor of Intelligent Control and Robotics
EE 4314 Lab 3 Handout Speed Control of the DC Motor System Using a PID Controller Fall Lab Information
 EE 4314 Lab 3 Handout Speed Control of the DC Motor System Using a PID Controller Fall 2012 IMPORTANT: This handout is common for all workbenches. 1. Lab Information a) Date, Time, Location, and Report
EE 4314 Lab 3 Handout Speed Control of the DC Motor System Using a PID Controller Fall 2012 IMPORTANT: This handout is common for all workbenches. 1. Lab Information a) Date, Time, Location, and Report
4 Experiment 4: DC Motor Voltage to Speed Transfer Function Estimation by Step Response and Frequency Response (Part 2)
") 4 Experiment 4: DC Motor Voltage to Speed Transfer Function Estimation by Step Response and Frequency Response (Part 2) 4.1 Introduction This lab introduces new methods for estimating the transfer function
4 Experiment 4: DC Motor Voltage to Speed Transfer Function Estimation by Step Response and Frequency Response (Part 2) 4.1 Introduction This lab introduces new methods for estimating the transfer function
ME451: Control Systems. Course roadmap
 ME451: Control Systems Lecture 20 Root locus: Lead compensator design Dr. Jongeun Choi Department of Mechanical Engineering Michigan State University Fall 2008 1 Modeling Course roadmap Analysis Design
ME451: Control Systems Lecture 20 Root locus: Lead compensator design Dr. Jongeun Choi Department of Mechanical Engineering Michigan State University Fall 2008 1 Modeling Course roadmap Analysis Design
CDS 101/110: Lecture 8.2 PID Control
 CDS 11/11: Lecture 8.2 PID Control November 16, 216 Goals: Nyquist Example Introduce and review PID control. Show how to use loop shaping using PID to achieve a performance specification Discuss the use
CDS 11/11: Lecture 8.2 PID Control November 16, 216 Goals: Nyquist Example Introduce and review PID control. Show how to use loop shaping using PID to achieve a performance specification Discuss the use
Figure 1.1: Quanser Driving Simulator
 1 INTRODUCTION The Quanser HIL Driving Simulator (QDS) is a modular and expandable LabVIEW model of a car driving on a closed track. The model is intended as a platform for the development, implementation
1 INTRODUCTION The Quanser HIL Driving Simulator (QDS) is a modular and expandable LabVIEW model of a car driving on a closed track. The model is intended as a platform for the development, implementation
EE 370/L Feedback and Control Systems Lab Section Post-Lab Report. EE 370L Feedback and Control Systems Lab
 EE 370/L Feedback and Control Systems Lab Post-Lab Report EE 370L Feedback and Control Systems Lab LABORATORY 10: LEAD-LAG COMPENSATOR DEPARTMENT OF ELECTRICAL AND COMPUTER ENGINEERING UNIVERSITY OF NEVADA,
EE 370/L Feedback and Control Systems Lab Post-Lab Report EE 370L Feedback and Control Systems Lab LABORATORY 10: LEAD-LAG COMPENSATOR DEPARTMENT OF ELECTRICAL AND COMPUTER ENGINEERING UNIVERSITY OF NEVADA,
Modeling and System Identification for a DC Servo
 Modeling and System Identification for a DC Servo Nicanor Quijano and Kevin M. Passino The Ohio State University, Department of Electrical Engineering, 2015 Neil Avenue, Columbus Ohio, 43210, USA March
Modeling and System Identification for a DC Servo Nicanor Quijano and Kevin M. Passino The Ohio State University, Department of Electrical Engineering, 2015 Neil Avenue, Columbus Ohio, 43210, USA March
ANNA UNIVERSITY :: CHENNAI MODEL QUESTION PAPER(V-SEMESTER) B.E. ELECTRONICS AND COMMUNICATION ENGINEERING EC334 - CONTROL SYSTEMS
 B.E. ELECTRONICS AND COMMUNICATION ENGINEERING EC334 - CONTROL SYSTEMS") ANNA UNIVERSITY :: CHENNAI - 600 025 MODEL QUESTION PAPER(V-SEMESTER) B.E. ELECTRONICS AND COMMUNICATION ENGINEERING EC334 - CONTROL SYSTEMS Time: 3hrs Max Marks: 100 Answer all Questions PART - A (10
ANNA UNIVERSITY :: CHENNAI - 600 025 MODEL QUESTION PAPER(V-SEMESTER) B.E. ELECTRONICS AND COMMUNICATION ENGINEERING EC334 - CONTROL SYSTEMS Time: 3hrs Max Marks: 100 Answer all Questions PART - A (10
EXPERIMENT 1 Control System Using Simulink
 German Jordanian University School of Applied Technical Sciences Mechatronics Engineering Department ME 3431 Automatic Control systems Lab EXPERIMENT 1 Control System Using Simulink Objective: - To introduce
German Jordanian University School of Applied Technical Sciences Mechatronics Engineering Department ME 3431 Automatic Control systems Lab EXPERIMENT 1 Control System Using Simulink Objective: - To introduce
ME 375. HW 7 Solutions. Original Homework Assigned 10/12, Due 10/19.
 ME 375. HW 7 Solutions. Original Homework Assigned /2, Due /9. Problem. Palm 8.2 a-b Part (a). T (s) = 5 6s+2 = 5 2 3s+. Here τ = 3 and the multiplicative factor 5/2 shifts the magnitude curve up by 2log5/2
ME 375. HW 7 Solutions. Original Homework Assigned /2, Due /9. Problem. Palm 8.2 a-b Part (a). T (s) = 5 6s+2 = 5 2 3s+. Here τ = 3 and the multiplicative factor 5/2 shifts the magnitude curve up by 2log5/2
Figure 1: Unity Feedback System. The transfer function of the PID controller looks like the following:
 Islamic University of Gaza Faculty of Engineering Electrical Engineering department Control Systems Design Lab Eng. Mohammed S. Jouda Eng. Ola M. Skeik Experiment 3 PID Controller Overview This experiment
Islamic University of Gaza Faculty of Engineering Electrical Engineering department Control Systems Design Lab Eng. Mohammed S. Jouda Eng. Ola M. Skeik Experiment 3 PID Controller Overview This experiment
Introduction to Modeling of Switched Mode Power Converters Using MATLAB and Simulink
 Introduction to Modeling of Switched Mode Power Converters Using MATLAB and Simulink Extensive introductory tutorials for MATLAB and Simulink, including Control Systems Toolbox and Simulink Control Design
Introduction to Modeling of Switched Mode Power Converters Using MATLAB and Simulink Extensive introductory tutorials for MATLAB and Simulink, including Control Systems Toolbox and Simulink Control Design
MAE106 Laboratory Exercises Lab # 5 - PD Control of DC motor position
 MAE106 Laboratory Exercises Lab # 5 - PD Control of DC motor position University of California, Irvine Department of Mechanical and Aerospace Engineering Goals Understand how to implement and tune a PD
MAE106 Laboratory Exercises Lab # 5 - PD Control of DC motor position University of California, Irvine Department of Mechanical and Aerospace Engineering Goals Understand how to implement and tune a PD
CDS 101/110: Lecture 9.1 Frequency DomainLoop Shaping
 CDS /: Lecture 9. Frequency DomainLoop Shaping November 3, 6 Goals: Review Basic Loop Shaping Concepts Work through example(s) Reading: Åström and Murray, Feedback Systems -e, Section.,.-.4,.6 I.e., we
CDS /: Lecture 9. Frequency DomainLoop Shaping November 3, 6 Goals: Review Basic Loop Shaping Concepts Work through example(s) Reading: Åström and Murray, Feedback Systems -e, Section.,.-.4,.6 I.e., we
Lab 1: Simulating Control Systems with Simulink and MATLAB
 Lab 1: Simulating Control Systems with Simulink and MATLAB EE128: Feedback Control Systems Fall, 2006 1 Simulink Basics Simulink is a graphical tool that allows us to simulate feedback control systems.
Lab 1: Simulating Control Systems with Simulink and MATLAB EE128: Feedback Control Systems Fall, 2006 1 Simulink Basics Simulink is a graphical tool that allows us to simulate feedback control systems.
LECTURE 2: PD, PID, and Feedback Compensation. ( ) = + We consider various settings for Zc when compensating the system with the following RL:
 = + We consider various settings for Zc when compensating the system with the following RL:") LECTURE 2: PD, PID, and Feedback Compensation. 2.1 Ideal Derivative Compensation (PD) Generally, we want to speed up the transient response (decrease Ts and Tp). If we are lucky then a system s desired
LECTURE 2: PD, PID, and Feedback Compensation. 2.1 Ideal Derivative Compensation (PD) Generally, we want to speed up the transient response (decrease Ts and Tp). If we are lucky then a system s desired
R. W. Erickson. Department of Electrical, Computer, and Energy Engineering University of Colorado, Boulder
 R. W. Erickson Department o Electrical, Computer, and Energy Engineering University o Colorado, Boulder Computation ohase! T 60 db 40 db 20 db 0 db 20 db 40 db T T 1 Crossover requency c 1 Hz 10 Hz 100
R. W. Erickson Department o Electrical, Computer, and Energy Engineering University o Colorado, Boulder Computation ohase! T 60 db 40 db 20 db 0 db 20 db 40 db T T 1 Crossover requency c 1 Hz 10 Hz 100
Servo Closed Loop Speed Control Transient Characteristics and Disturbances
 Exercise 5 Servo Closed Loop Speed Control Transient Characteristics and Disturbances EXERCISE OBJECTIVE When you have completed this exercise, you will be familiar with the transient behavior of a servo
Exercise 5 Servo Closed Loop Speed Control Transient Characteristics and Disturbances EXERCISE OBJECTIVE When you have completed this exercise, you will be familiar with the transient behavior of a servo
Dr Ian R. Manchester Dr Ian R. Manchester Amme 3500 : Root Locus Design
 Week Content Notes 1 Introduction 2 Frequency Domain Modelling 3 Transient Performance and the s-plane 4 Block Diagrams 5 Feedback System Characteristics Assign 1 Due 6 Root Locus 7 Root Locus 2 Assign
Week Content Notes 1 Introduction 2 Frequency Domain Modelling 3 Transient Performance and the s-plane 4 Block Diagrams 5 Feedback System Characteristics Assign 1 Due 6 Root Locus 7 Root Locus 2 Assign
Andrea Zanchettin Automatic Control 1 AUTOMATIC CONTROL. Andrea M. Zanchettin, PhD Winter Semester, Linear control systems design Part 1
 Andrea Zanchettin Automatic Control 1 AUTOMATIC CONTROL Andrea M. Zanchettin, PhD Winter Semester, 2018 Linear control systems design Part 1 Andrea Zanchettin Automatic Control 2 Step responses Assume
Andrea Zanchettin Automatic Control 1 AUTOMATIC CONTROL Andrea M. Zanchettin, PhD Winter Semester, 2018 Linear control systems design Part 1 Andrea Zanchettin Automatic Control 2 Step responses Assume
A Machine Tool Controller using Cascaded Servo Loops and Multiple Feedback Sensors per Axis
 A Machine Tool Controller using Cascaded Servo Loops and Multiple Sensors per Axis David J. Hopkins, Timm A. Wulff, George F. Weinert Lawrence Livermore National Laboratory 7000 East Ave, L-792, Livermore,
A Machine Tool Controller using Cascaded Servo Loops and Multiple Sensors per Axis David J. Hopkins, Timm A. Wulff, George F. Weinert Lawrence Livermore National Laboratory 7000 East Ave, L-792, Livermore,
Chapter 5 Frequency-domain design
 Chapter 5 Frequency-domain design Control Automático 3º Curso. Ing. Industrial Escuela Técnica Superior de Ingenieros Universidad de Sevilla Outline of the presentation Introduction. Time response analysis
Chapter 5 Frequency-domain design Control Automático 3º Curso. Ing. Industrial Escuela Técnica Superior de Ingenieros Universidad de Sevilla Outline of the presentation Introduction. Time response analysis
 EC6405 - CONTROL SYSTEM ENGINEERING Questions and Answers Unit - II Time Response Analysis Two marks 1. What is transient response? The transient response is the response of the system when the system
EC6405 - CONTROL SYSTEM ENGINEERING Questions and Answers Unit - II Time Response Analysis Two marks 1. What is transient response? The transient response is the response of the system when the system
This manuscript was the basis for the article A Refresher Course in Control Theory printed in Machine Design, September 9, 1999.
 This manuscript was the basis for the article A Refresher Course in Control Theory printed in Machine Design, September 9, 1999. Use Control Theory to Improve Servo Performance George Ellis Introduction
This manuscript was the basis for the article A Refresher Course in Control Theory printed in Machine Design, September 9, 1999. Use Control Theory to Improve Servo Performance George Ellis Introduction
Lab 11. Speed Control of a D.C. motor. Motor Characterization
 Lab 11. Speed Control of a D.C. motor Motor Characterization Motor Speed Control Project 1. Generate PWM waveform 2. Amplify the waveform to drive the motor 3. Measure motor speed 4. Estimate motor parameters
Lab 11. Speed Control of a D.C. motor Motor Characterization Motor Speed Control Project 1. Generate PWM waveform 2. Amplify the waveform to drive the motor 3. Measure motor speed 4. Estimate motor parameters
CHAPTER 6 INTRODUCTION TO SYSTEM IDENTIFICATION
 CHAPTER 6 INTRODUCTION TO SYSTEM IDENTIFICATION Broadly speaking, system identification is the art and science of using measurements obtained from a system to characterize the system. The characterization
CHAPTER 6 INTRODUCTION TO SYSTEM IDENTIFICATION Broadly speaking, system identification is the art and science of using measurements obtained from a system to characterize the system. The characterization
Motor Modeling and Position Control Lab 3 MAE 334
 Motor ing and Position Control Lab 3 MAE 334 Evan Coleman April, 23 Spring 23 Section L9 Executive Summary The purpose of this experiment was to observe and analyze the open loop response of a DC servo
Motor ing and Position Control Lab 3 MAE 334 Evan Coleman April, 23 Spring 23 Section L9 Executive Summary The purpose of this experiment was to observe and analyze the open loop response of a DC servo
Mechatronics. Analog and Digital Electronics: Studio Exercises 1 & 2
 Mechatronics Analog and Digital Electronics: Studio Exercises 1 & 2 There is an electronics revolution taking place in the industrialized world. Electronics pervades all activities. Perhaps the most important
Mechatronics Analog and Digital Electronics: Studio Exercises 1 & 2 There is an electronics revolution taking place in the industrialized world. Electronics pervades all activities. Perhaps the most important
Teaching Mechanical Students to Build and Analyze Motor Controllers
 Teaching Mechanical Students to Build and Analyze Motor Controllers Hugh Jack, Associate Professor Padnos School of Engineering Grand Valley State University Grand Rapids, MI email: jackh@gvsu.edu Session
Teaching Mechanical Students to Build and Analyze Motor Controllers Hugh Jack, Associate Professor Padnos School of Engineering Grand Valley State University Grand Rapids, MI email: jackh@gvsu.edu Session
Implementation and Simulation of Digital Control Compensators from Continuous Compensators Using MATLAB Software
 Implementation and Simulation of Digital Control Compensators from Continuous Compensators Using MATLAB Software MAHMOUD M. EL -FANDI Electrical and Electronic Dept. University of Tripoli/Libya m_elfandi@hotmail.com
Implementation and Simulation of Digital Control Compensators from Continuous Compensators Using MATLAB Software MAHMOUD M. EL -FANDI Electrical and Electronic Dept. University of Tripoli/Libya m_elfandi@hotmail.com
TUTORIAL 9 OPEN AND CLOSED LOOP LINKS. On completion of this tutorial, you should be able to do the following.
 TUTORIAL 9 OPEN AND CLOSED LOOP LINKS This tutorial is of interest to any student studying control systems and in particular the EC module D7 Control System Engineering. On completion of this tutorial,
TUTORIAL 9 OPEN AND CLOSED LOOP LINKS This tutorial is of interest to any student studying control systems and in particular the EC module D7 Control System Engineering. On completion of this tutorial,
Industrial Control Equipment. ACS-1000 Analog Control System
 Analog Control System, covered with many technical disciplines, explicates the central significance of Analog Control System. This applies particularly in mechanical and electrical engineering, and as
Analog Control System, covered with many technical disciplines, explicates the central significance of Analog Control System. This applies particularly in mechanical and electrical engineering, and as
Classical Control Design Guidelines & Tools (L10.2) Transfer Functions
 Transfer Functions") Classical Control Design Guidelines & Tools (L10.2) Douglas G. MacMartin Summarize frequency domain control design guidelines and approach Dec 4, 2013 D. G. MacMartin CDS 110a, 2013 1 Transfer Functions
Classical Control Design Guidelines & Tools (L10.2) Douglas G. MacMartin Summarize frequency domain control design guidelines and approach Dec 4, 2013 D. G. MacMartin CDS 110a, 2013 1 Transfer Functions
EES42042 Fundamental of Control Systems Bode Plots
 EES42042 Fundamental of Control Systems Bode Plots DR. Ir. Wahidin Wahab M.Sc. Ir. Aries Subiantoro M.Sc. 2 Bode Plots Plot of db Gain and phase vs frequency It is assumed you know how to construct Bode
EES42042 Fundamental of Control Systems Bode Plots DR. Ir. Wahidin Wahab M.Sc. Ir. Aries Subiantoro M.Sc. 2 Bode Plots Plot of db Gain and phase vs frequency It is assumed you know how to construct Bode
Homework Assignment 13
 Question 1 Short Takes 2 points each. Homework Assignment 13 1. Classify the type of feedback uses in the circuit below (i.e., shunt-shunt, series-shunt, ) Answer: Series-shunt. 2. True or false: an engineer
Question 1 Short Takes 2 points each. Homework Assignment 13 1. Classify the type of feedback uses in the circuit below (i.e., shunt-shunt, series-shunt, ) Answer: Series-shunt. 2. True or false: an engineer
Phys Lecture 5. Motors
 Phys 253 Lecture 5 1. Get ready for Design Reviews Next Week!! 2. Comments on Motor Selection 3. Introduction to Control (Lab 5 Servo Motor) Different performance specifications for all 4 DC motors supplied
Phys 253 Lecture 5 1. Get ready for Design Reviews Next Week!! 2. Comments on Motor Selection 3. Introduction to Control (Lab 5 Servo Motor) Different performance specifications for all 4 DC motors supplied
Andrea Zanchettin Automatic Control 1 AUTOMATIC CONTROL. Andrea M. Zanchettin, PhD Spring Semester, Linear control systems design
 Andrea Zanchettin Automatic Control 1 AUTOMATIC CONTROL Andrea M. Zanchettin, PhD Spring Semester, 2018 Linear control systems design Andrea Zanchettin Automatic Control 2 The control problem Let s introduce
Andrea Zanchettin Automatic Control 1 AUTOMATIC CONTROL Andrea M. Zanchettin, PhD Spring Semester, 2018 Linear control systems design Andrea Zanchettin Automatic Control 2 The control problem Let s introduce
(1) Identify individual entries in a Control Loop Diagram. (2) Sketch Bode Plots by hand (when we could have used a computer
 Identify individual entries in a Control Loop Diagram. (2) Sketch Bode Plots by hand (when we could have used a computer") Last day: (1) Identify individual entries in a Control Loop Diagram (2) Sketch Bode Plots by hand (when we could have used a computer program to generate sketches). How might this be useful? Can more clearly
Last day: (1) Identify individual entries in a Control Loop Diagram (2) Sketch Bode Plots by hand (when we could have used a computer program to generate sketches). How might this be useful? Can more clearly
7 Lab: Motor control for orientation and angular speed
 Prelab Participation Lab Name: 7 Lab: Motor control for orientation and angular speed Control systems help satellites to track distant stars, airplanes to follow a desired trajectory, cars to travel at
Prelab Participation Lab Name: 7 Lab: Motor control for orientation and angular speed Control systems help satellites to track distant stars, airplanes to follow a desired trajectory, cars to travel at
Readings: FC: p : lead compensation. 9/9/2011 Classical Control 1
 MM0 Frequency Response Design Readings: FC: p389-407: lead compensation 9/9/20 Classical Control What Have We Talked about in MM9? Control design based on Bode plot Stability margins (Gain margin and phase
MM0 Frequency Response Design Readings: FC: p389-407: lead compensation 9/9/20 Classical Control What Have We Talked about in MM9? Control design based on Bode plot Stability margins (Gain margin and phase
UNIT 2: DC MOTOR POSITION CONTROL
 UNIT 2: DC MOTOR POSITION CONTROL 2.1 INTRODUCTION This experiment aims to show the mathematical model of a DC motor and how to determine the physical parameters of a DC motor model. Once the model is
UNIT 2: DC MOTOR POSITION CONTROL 2.1 INTRODUCTION This experiment aims to show the mathematical model of a DC motor and how to determine the physical parameters of a DC motor model. Once the model is
ECE411 - Laboratory Exercise #1
 ECE411 - Laboratory Exercise #1 Introduction to Matlab/Simulink This laboratory exercise is intended to provide a tutorial introduction to Matlab/Simulink. Simulink is a Matlab toolbox for analysis/simulation
ECE411 - Laboratory Exercise #1 Introduction to Matlab/Simulink This laboratory exercise is intended to provide a tutorial introduction to Matlab/Simulink. Simulink is a Matlab toolbox for analysis/simulation
Designing PID controllers with Matlab using frequency response methodology
 Designing PID controllers with Matlab using frequency response methodology by Frank Owen, PhD, PE polyxengineering, Inc. San Luis Obispo, California 16 March 2017 (www.polyxengineering.com) This paper
Designing PID controllers with Matlab using frequency response methodology by Frank Owen, PhD, PE polyxengineering, Inc. San Luis Obispo, California 16 March 2017 (www.polyxengineering.com) This paper
JUNE 2014 Solved Question Paper
 JUNE 2014 Solved Question Paper 1 a: Explain with examples open loop and closed loop control systems. List merits and demerits of both. Jun. 2014, 10 Marks Open & Closed Loop System - Advantages & Disadvantages
JUNE 2014 Solved Question Paper 1 a: Explain with examples open loop and closed loop control systems. List merits and demerits of both. Jun. 2014, 10 Marks Open & Closed Loop System - Advantages & Disadvantages
Observer-based Engine Cooling Control System (OBCOOL) Project Proposal. Students: Andrew Fouts & Kurtis Liggett. Advisor: Dr.
 Project Proposal. Students: Andrew Fouts & Kurtis Liggett. Advisor: Dr.") Observer-based Engine Cooling Control System (OBCOOL) Project Proposal Students: Andrew Fouts & Kurtis Liggett Advisor: Dr. Gary Dempsey Date: December 09, 2010 1 Introduction Control systems exist in
Observer-based Engine Cooling Control System (OBCOOL) Project Proposal Students: Andrew Fouts & Kurtis Liggett Advisor: Dr. Gary Dempsey Date: December 09, 2010 1 Introduction Control systems exist in
USER MANUAL. SRV02 Rotary Servo Base Unit. Set Up and Configuration
 Ten modules to teach controls from the basic to advanced level SRV02 Base Unit Flexible Link Inverted Pendulum Ball and Beam USER MANUAL SRV02 Rotary Servo Base Unit Set Up and Configuration 2 DOF Robot
Ten modules to teach controls from the basic to advanced level SRV02 Base Unit Flexible Link Inverted Pendulum Ball and Beam USER MANUAL SRV02 Rotary Servo Base Unit Set Up and Configuration 2 DOF Robot
Laboratory 5: RC Circuits and Filtering
 5.1 Introduction Laboratory 5: ircuits and Filtering For this lab, you will be comparing the experimental behavior of a filter with analytical behavior modeled in MATLAB using Bode plots. During the lab
5.1 Introduction Laboratory 5: ircuits and Filtering For this lab, you will be comparing the experimental behavior of a filter with analytical behavior modeled in MATLAB using Bode plots. During the lab
Module 08 Controller Designs: Compensators and PIDs
 Module 08 Controller Designs: Compensators and PIDs Ahmad F. Taha EE 3413: Analysis and Desgin of Control Systems Email: ahmad.taha@utsa.edu Webpage: http://engineering.utsa.edu/ taha March 31, 2016 Ahmad
Module 08 Controller Designs: Compensators and PIDs Ahmad F. Taha EE 3413: Analysis and Desgin of Control Systems Email: ahmad.taha@utsa.edu Webpage: http://engineering.utsa.edu/ taha March 31, 2016 Ahmad
METHODS TO IMPROVE DYNAMIC RESPONSE OF POWER FACTOR PREREGULATORS: AN OVERVIEW
 METHODS TO IMPROE DYNAMIC RESPONSE OF POWER FACTOR PREREGULATORS: AN OERIEW G. Spiazzi*, P. Mattavelli**, L. Rossetto** *Dept. of Electronics and Informatics, **Dept. of Electrical Engineering University
METHODS TO IMPROE DYNAMIC RESPONSE OF POWER FACTOR PREREGULATORS: AN OERIEW G. Spiazzi*, P. Mattavelli**, L. Rossetto** *Dept. of Electronics and Informatics, **Dept. of Electrical Engineering University
SRV02-Series. Rotary Servo Plant. User Manual
 SRV02-Series Rotary Servo Plant User Manual SRV02-(E;EHR)(T) Rotary Servo Plant User Manual 1. Description The plant consists of a DC motor in a solid aluminum frame. The motor is equipped with a gearbox.
SRV02-Series Rotary Servo Plant User Manual SRV02-(E;EHR)(T) Rotary Servo Plant User Manual 1. Description The plant consists of a DC motor in a solid aluminum frame. The motor is equipped with a gearbox.
Lab 23 Microcomputer-Based Motor Controller
 Lab 23 Microcomputer-Based Motor Controller Page 23.1 Lab 23 Microcomputer-Based Motor Controller This laboratory assignment accompanies the book, Embedded Microcomputer Systems: Real Time Interfacing,
Lab 23 Microcomputer-Based Motor Controller Page 23.1 Lab 23 Microcomputer-Based Motor Controller This laboratory assignment accompanies the book, Embedded Microcomputer Systems: Real Time Interfacing,
CSE 3215 Embedded Systems Laboratory Lab 5 Digital Control System
 Introduction CSE 3215 Embedded Systems Laboratory Lab 5 Digital Control System The purpose of this lab is to introduce you to digital control systems. The most basic function of a control system is to
Introduction CSE 3215 Embedded Systems Laboratory Lab 5 Digital Control System The purpose of this lab is to introduce you to digital control systems. The most basic function of a control system is to
A Case Study of Rotating Sonar Sensor Application in Unmanned Automated Guided Vehicle
 A Case Study of Rotating Sonar Sensor Application in Unmanned Automated Guided Vehicle Pravin Chandak, Ming Cao and Ernest L. Hall University of Cincinnati Center for Robotics University of Cincinnati
A Case Study of Rotating Sonar Sensor Application in Unmanned Automated Guided Vehicle Pravin Chandak, Ming Cao and Ernest L. Hall University of Cincinnati Center for Robotics University of Cincinnati
CDS 101/110a: Lecture 8-1 Frequency Domain Design. Frequency Domain Performance Specifications
 CDS /a: Lecture 8- Frequency Domain Design Richard M. Murray 7 November 28 Goals:! Describe canonical control design problem and standard performance measures! Show how to use loop shaping to achieve a
CDS /a: Lecture 8- Frequency Domain Design Richard M. Murray 7 November 28 Goals:! Describe canonical control design problem and standard performance measures! Show how to use loop shaping to achieve a
CONTROLLER DESIGN FOR POWER CONVERSION SYSTEMS
 CONTROLLER DESIGN FOR POWER CONVERSION SYSTEMS Introduction A typical feedback system found in power converters Switched-mode power converters generally use PI, pz, or pz feedback compensators to regulate
CONTROLLER DESIGN FOR POWER CONVERSION SYSTEMS Introduction A typical feedback system found in power converters Switched-mode power converters generally use PI, pz, or pz feedback compensators to regulate
Hands-on Lab. PID Closed-Loop Control
 Hands-on Lab PID Closed-Loop Control Adding feedback improves performance. Unity feedback was examined to serve as a motivating example. Lectures derived the power of adding proportional, integral and
Hands-on Lab PID Closed-Loop Control Adding feedback improves performance. Unity feedback was examined to serve as a motivating example. Lectures derived the power of adding proportional, integral and
Lecture 9. Lab 16 System Identification (2 nd or 2 sessions) Lab 17 Proportional Control
 Lab 17 Proportional Control") 246 Lecture 9 Coming week labs: Lab 16 System Identification (2 nd or 2 sessions) Lab 17 Proportional Control Today: Systems topics System identification (ala ME4232) Time domain Frequency domain Proportional
246 Lecture 9 Coming week labs: Lab 16 System Identification (2 nd or 2 sessions) Lab 17 Proportional Control Today: Systems topics System identification (ala ME4232) Time domain Frequency domain Proportional
Bode and Log Magnitude Plots
 Bode and Log Magnitude Plots Bode Magnitude and Phase Plots System Gain and Phase Margins & Bandwidths Polar Plot and Bode Diagrams Transfer Function from Bode Plots Bode Plots of Open Loop and Closed
Bode and Log Magnitude Plots Bode Magnitude and Phase Plots System Gain and Phase Margins & Bandwidths Polar Plot and Bode Diagrams Transfer Function from Bode Plots Bode Plots of Open Loop and Closed