EE C245 ME C218 Introduction to MEMS Design
|
|
|
- Erin Osborne
- 6 years ago
- Views:
Transcription
1 EE C245 ME C218 Introduction to MEMS Design Fall 2007 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA Lecture 20: Equivalent Circuits it I & Project EE C245: Introduction to MEMS Design Lecture 20 C. Nguyen 11/6/08 1
2 Lecture Outline Reading: Senturia, Chpt. 5, Chpt. 6, Chpt. 21 Lecture Topics: Lumped Mechanical Equivalent Circuits Project: Gyroscopes Deep Reactive-Ion Etching (revisited) Lossless Transducers EE C245: Introduction to MEMS Design Lecture 20 C. Nguyen 11/6/08 2
3 Free-Free Beam Frequency (cont) Applying B.C. s, get A=B and B=D, and (3) Setting the determinant = 0 yields Which has roots at Substituting (2) into (1) finally yields: Free-Free Beam Frequency Equation EE C245: Introduction to MEMS Design Lecture 19 C. Nguyen 11/4/08 3
 2 nd Harmonic (n=3) EE C245: Introduction to MEMS Design Lecture 19 C. Nguyen 11/4/08 4")
4 Higher Order Free-Free Beam Modes More than 10x increase Fundamental Mode (n=1) 1 st Harmonic (n=2) 2 nd Harmonic (n=3) EE C245: Introduction to MEMS Design Lecture 19 C. Nguyen 11/4/08 4
5 Mode Shape Expression The mode shape expression can be obtained by using the fact that A=B and C=D into (2), yielding Get the amplitude ratio by expanding (3) [the matrix] and solving, which yields Then just substitute the roots for each mode to get the expression for mode shape Fundamental Mode (n=1) [Substitute ] EE C245: Introduction to MEMS Design Lecture 19 C. Nguyen 11/4/08 5
6 Lumped Parameter Mechanical Equivalent Circuit it EE C245: Introduction to MEMS Design Lecture 19 C. Nguyen 11/4/08 6
7 Equivalent Dynamic Mass Once the mode shape is known, the lumped parameter equivalent circuit can then be specified Determine the equivalent mass at a specific location x using knowledge of kinetic energy and velocity z Location x W h Maximum Kinetic Energy Density Equivalent Mass = Maximum location x Maximum Velocity Function EE C245: Introduction to MEMS Design Lecture 19 C. Nguyen 11/4/08 7
8 Equivalent Dynamic Mass z Location x W h We know the mode shape, so we can write expressions for displacement and velocity at resonance EE C245: Introduction to MEMS Design Lecture 20 C. Nguyen 11/6/08 8
9 Equivalent Dynamic Stiffness & Damping z Location x W h Stiffness then follows directly from knowledge of mass and resonance frequency And damping also follows readily EE C245: Introduction to MEMS Design Lecture 20 C. Nguyen 11/6/08 9
10 Equivalent Lumped Mechanical Circuit z Location x W h K eq (x) C eq (x) K M eq (x) 2 eq ( x ) = ω o M eq M eq ( x) ( x ) = ρ ωo Meq( x) C eq ( x ) = Q 2 A l [ u ( x )] dx o 2 [ u( x)] EE C245: Introduction to MEMS Design Lecture 20 C. Nguyen 11/6/08 10
11 Equivalent Lumped Mechanical Circuit z Example: Polysilicon w/ l=14.9μm, W=6μm, h=2μm 70 MHz W h K eq (0) = 19, N/m M eq (0) = 1.03x10-13 kg K eq (node) = M eq (node) = C eq (node) = K eq (l/2) = 53,938 N/m M eq (l/2) = 2.78x10-13 kg C eq (0) = 5.66x10-9 kg/s C eq (l/2) = 1.53x10-8 kg/s EE C245: Introduction to MEMS Design Lecture 20 C. Nguyen 11/6/08 11





12 3CC 3λ/4 Bridged μmechanical Filter Performance: f o =9MHz, BW=20kHz, PBW=0.2% IL=2 I.L.=2.79dB, Stop. Rej.=51dB 20dB S.F.=1.95, 40dB S.F.=6.45 V P In Out 0 Transmis ssion [db B] P in =-20dBm [S.-S. Li, Nguyen, FCS 05] Sharper roll-off Loss Pole [Li, et al., UFFCS 04] Frequency [MHz] Design: L r =40μm W r =6.5μm h r =2μm L c =3.5μm 35 L b =1.6μm V P =10.47V P=-5dBm R Qi =R Qo =12kΩ EE C245: Introduction to MEMS Design Lecture 20 C. Nguyen 11/6/08 12
13 Electromechanical Analogies k eq l x c x r x m eq c eq EE C245: Introduction to MEMS Design Lecture 20 C. Nguyen 11/6/08 13
14 Electromechanical Analogies (cont) Mechanical-to-electrical correspondence in the current analogy: EE C245: Introduction to MEMS Design Lecture 20 C. Nguyen 11/6/08 14
15 Bandpass Biquad Transfer Function k eq m eq c eq EE C245: Introduction to MEMS Design Lecture 20 C. Nguyen 11/6/08 15
16 Gyroscopes EE C245: Introduction to MEMS Design Lecture 20 C. Nguyen 11/6/08 16
17 Classic Spinning Gyroscope A gyroscope measures rotation rate, which then gives orientation very important, of course, for navigation Principle i of operation based on conservation of momentum Example: classic spinning gyroscope Rotor will preserve its angular momentum (i.e., will maintain its axis of spin) despite rotation of its gimbled chassis EE C245: Introduction to MEMS Design Lecture 20 C. Nguyen 11/6/08 17
18 Vibratory Gyroscopes Generate momentum by vibrating structures Again, conservation of momentum leads to mechanisms for measuring rotation ti rate and orientation ti Example: vibrating mass in a rotating frame y Driven into vibration along the y-axis Mass at rest y Get an x component x x of motion C(t) Rotate 30 o C(t 2 ) > C(t 1 ) C(t 1 ) C(t 2 ) y-displaced mass Capacitance between mass and frame = constant EE C245: Introduction to MEMS Design Lecture 20 C. Nguyen 11/6/08 18

 Response z Ω r Driven Vibration @ f o")

19 Basic Vibratory Gyroscope Operation Principle of Operation Tuning Fork Gyroscope: Input Rotation a r c Coriolis () Response z Ω r Driven f o v r Coriolis Torque x z y EE C245: Introduction to MEMS Design Lecture 20 C. Nguyen 11/6/08 19
20 Basic Vibratory Gyroscope Operation Principle of Operation Tuning Fork Gyroscope: Input Rotation a r c Coriolis () Response Coriolis Torque z Ω r Driven f o x v r Am mplitude Coriolis Acceleration Coriolis Force Drive/ Response Spectra: Drive Response r x Driven Velocity r r r a c = 2v Ω r F k r ma f o (@ T 1 ) c c c z 2 k ω r y Coriolis Displacement = = Beam Stiffness = Response Rotation Rate r a Beam Mass ω Frequency EE C245: Introduction to MEMS Design Lecture 20 C. Nguyen 11/6/08 20
21 Vibratory Gyroscope Performance Principle of Operation Tuning Fork Gyroscope: Input Rotation z Driven f o r x = r F k c = Beam Mass r ma k c r a = ω Beam Stiffness c 2 r Frequency r r r a c = 2v Ω Driven Velocity Ω r a r v r To maximize the output signal x, c need: Large sense-axis mass Small sense-axis stiffness p (Above together mean low resonance frequency) Large drive amplitude for large driven velocity (so use comb- drive) z If can match drive freq. to y sense freq., then can amplify output by Q times Coriolis () Response Coriolis Torque x EE C245: Introduction to MEMS Design Lecture 20 C. Nguyen 11/6/08 21

![] Tuning Fork Gyroscope [Draper Labs.] 3.](/docs-images/78/78248092/images/22-1.jpg "2 mm Nuclear Magnetic Resonance Gyro [NIST]")
![[Najafi, Michigan] Laser Polarizer 1 mm Rb/Xe Cell](/docs-images/78/78248092/images/22-2.jpg "Photodiode 1 mm θ & t EE C245: Introduction to MEMS")
22 MEMS-Based Gyroscopes Vibrating Ring Gyroscope Tuning Fork Gyroscope [Ayazi, GA Tech.] Tuning Fork Gyroscope [Draper Labs.] 3.2 mm Nuclear Magnetic Resonance Gyro [NIST] [Najafi, Michigan] Laser Polarizer 1 mm Rb/Xe Cell Photodiode 1 mm θ & t EE C245: Introduction to MEMS Design Lecture 20 C. Nguyen 11/6/08 22










23 MEMS-Based Tuning Fork Gyroscope Drive Electrode Tuning Tuning Drive Electrode Di Drive Mode Md Quadrature Cancellation In-plane pan drive and sense modes pick pc up z-axis rotations Mode-matching for maximum output sensitivity From [Zaman, Ayazi, et al, MEMS 06] Mode EE C245: Introduction to MEMS Design Lecture 20 C. Nguyen 11/6/08 23

 Output Current")



24 MEMS-Based Tuning Fork Gyroscope Ω r z Tuning Drive Voltage Signal (-) Output Current (+) Output Current Tuning Drive Electrode Drive [Zaman, Ayazi, et al, MEMS 06] Drive Oscillation Sustaining Amplifier Differential TransR Amplifier EE C245: Introduction to MEMS Design Lecture 20 C. Nguyen 11/6/08 24
25 MEMS-Based Tuning Fork Gyroscope Drive and sense axes must be stable or at least track one another to avoid output drift Drive Electrode Tuning Quadrature Cancellation Need: small or matched drive and sense axis temperature coefficients to suppress drift Amplitu ude Tuning Drive Electrode Drive Drive Response Problem: if drive frequency changes relative to sense frequency, output changes bias drift T 1 Response EE C245: Introduction to MEMS Design Lecture 20 C. Nguyen 11/6/08 25 T 2 f o (@ T 1 ) f o (@ T 2 ) ω
26 Mode Matching for Higher Resolution For higher resolution, can try to match drive and sense axis resonance frequencies and benefit from Q amplification Drive Electrode Tuning Problem: mismatch between drive and sense frequencies even larger drift! Tuning Drive Electrode Drive T 1 Response Quadrature Cancellation Need: small or matched drive and sense axis temperature coefficients to make this work Amplitu ude Drive Response EE C245: Introduction to MEMS Design Lecture 20 C. Nguyen 11/6/08 26 T 2 f o (@ T 1 ) f o (@ T 2 ) ω
27 Issue: Zero Rate Bias Error Imbalances in the system can lead to zero rate bias error Quadrature Cancellation Di Drive Electrode Tuning Tuning Drive Electrode Mass imbalance off-axis motion of the proof mass Quadrature Cancellation Drive imbalance off-axis motion of the proof mass Output signal in phase with the Coriolis acceleration Quadrature output signal that can be confused with the Coriolis acceleration EE C245: Introduction to MEMS Design Lecture 20 C. Nguyen 11/6/08 27
28 Nuclear Magnetic Res. Gyroscope The ultimate in miniaturized spinning gyroscopes? from CSAC, we may now have the technology to do this -20º 0º Better if this is a noble gas nucleus (rather than e-), since nuclei are heavier less susceptible to B field 20º Soln: Spin polarize Xe 129 nuclei by first polarizing e- of Rb 87 (a la CSAC), then allowing spin exchange Atoms Aligned Nuclear Spins -20º 0º 20º 3.2 mm Challenge: suppressing the effects of B field Laser Polarizer Rb/Xe Cell Photodiode 1 mm θ & t 1 mm EE C245: Introduction to MEMS Design Lecture 20 C. Nguyen 11/6/08 28
29 MEMS-Based Tuning Fork Gyroscope Ω r z Tuning Drive Voltage Signal (-) Output Current (+) Output Current Tuning Drive Electrode Drive [Zaman, Ayazi, et al, MEMS 06] Drive Oscillation Sustaining Amplifier Differential TransR Amplifier EE C245: Introduction to MEMS Design Lecture 20 C. Nguyen 11/6/08 29
30 Deep Reactive-Ion Etching EE C245: Introduction to MEMS Design Lecture 20 C. Nguyen 11/6/08 30
 The")


: SF")






31 Deep Reactive-Ion Etching (DRIE) The Bosch process: Inductively-coupled plasma Etch Rate: μm/min Two main cycles in the etch: Etch cycle (5-15 s): SF 6 (SF x+ ) etches Si Deposition cycle: (5-15 s): C 4 F 8 deposits fluorocarbon protective polymer (CF 2- ) n Etch mask selectivity: SiO 2 ~ 200:1 Photoresist ~ 100:1 Issue: finite sidewall roughness scalloping < 50 nm Sidewall angle: 90 o ±2 o EE C245: Introduction to MEMS Design Lecture 20 C. Nguyen 11/6/08 31
32 DRIE Issues: Etch Rate Variance Etch rate is diffusion-limited and drops for narrow trenches Adjust mask layout to eliminate large disparities Adjust process parameters (slow down the etch rate to that governed by the slowest feature) Etch rate decreases with trench width EE C245: Introduction to MEMS Design Lecture 20 C. Nguyen 11/6/08 32
 etch practically just stops when it")

 potential Charging-induced potential perturbs the E-field Distorts the")

33 DRIE Issues: Footing Etch depth precision Etch stop: buried layer of SiO 2 Due to 200:1 selectivity, the (vertical) etch practically just stops when it reaches SiO 2 Problem: Lateral undercut at Si/SiO 2 interface footing Caused by charge accumulation at the insulator Poor charge relaxation and lack of neutralization of e - s at insulator Ion flux into substrate bt t bild builds up (+) potential Charging-induced potential perturbs the E-field Distorts the ion trajectory Result: strong and localized damage to the structure at Si-SiO 2 interface footing EE C245: Introduction to MEMS Design Lecture 20 C. Nguyen 11/6/08 33
34 Recipe-Based Suppression of Footing Use higher process pressure to reduce ion charging [Nozawa] High operating pressure concentration of (-) ions increases and can neutralize (+) surface charge Issue: must introduce as a separate recipe when the etch reaches the Si-insulator interface, so must be able to very accurately predict the time needed for etching Adjust etch recipe to reduce overetching [Schmidt] Change C 4F 8 flow rate, pressure, etc., to enhance passivation and reduce overetching Issue: Difficult to simultaneously control footing in a narrow trench and prevent grass in wide trenches Use lower frequency plasma to avoid surface charging [Morioka] Low frequency more ions with low directionality and kinetic energy neutralizes (-) potential barrier at trench entrance Allows e - s to reach the trench base and neutralize (+) charge maintain charge balance inside the trench EE C245: Introduction to MEMS Design Lecture 20 C. Nguyen 11/6/08 34
")

")


 charge and")

 (i) Remove")
 Metallize EE")
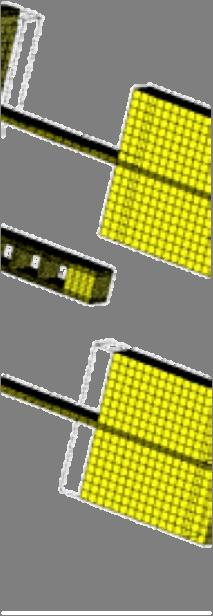
35 Metal Interlayer to Prevent Footing (a) Photolithography 1 (f) Silicon Thinning (sacrificial) (b) Preparatory trenches (g) Photolithography 2 (c) Metal interlayer deposition (h) DRIE Pre-defined metal interlayer grounded to substrate supplies e s to neutralize (+) charge and prevent charge accumulation at the Si-insulator interface (d) Lift-off (remove PR) (i) Remove metal interlayer (e) Anodic Bonding (i) Metallize EE C245: Introduction to MEMS Design Lecture 20 C. Nguyen 11/6/08 35
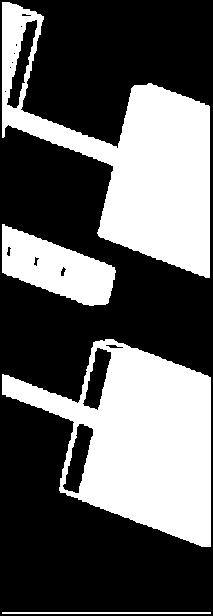
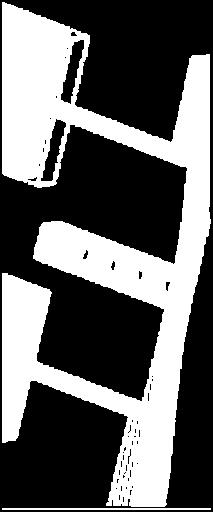
 Below: DRIE footing over an oxide stop layer")


36 Footing Prevention (cont.) Below: DRIE footing over an oxide stop layer Right: efficacy of the metal interlayer footing prevention approach [Kim, Stanford] No metal interlayer Footing No footing With metal interlayer [Kim, Seoul Nat. Univ.] EE C245: Introduction to MEMS Design Lecture 20 C. Nguyen 11/6/08 36



![Rockwell]](/docs-images/78/78248092/images/37-3.jpg "Microgripper")

![Instruments]](/docs-images/78/78248092/images/37-5.jpg "EE C245:")

37 DRIE Examples High aspectratio gear Tunable Capacitor [Yao, Rockwell] Microgripper [Keller, MEMS Precision Instruments] EE C245: Introduction to MEMS Design Lecture 20 C. Nguyen 11/6/08 37
EE C245 ME C218 Introduction to MEMS Design
 EE C245 ME C218 Introduction to MEMS Design Fall 2007 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 94720 Lecture 21: Gyros
EE C245 ME C218 Introduction to MEMS Design Fall 2007 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 94720 Lecture 21: Gyros
PROBLEM SET #7. EEC247B / ME C218 INTRODUCTION TO MEMS DESIGN SPRING 2015 C. Nguyen. Issued: Monday, April 27, 2015
 Issued: Monday, April 27, 2015 PROBLEM SET #7 Due (at 9 a.m.): Friday, May 8, 2015, in the EE C247B HW box near 125 Cory. Gyroscopes are inertial sensors that measure rotation rate, which is an extremely
Issued: Monday, April 27, 2015 PROBLEM SET #7 Due (at 9 a.m.): Friday, May 8, 2015, in the EE C247B HW box near 125 Cory. Gyroscopes are inertial sensors that measure rotation rate, which is an extremely
EE C245 ME C218 Introduction to MEMS Design
 EE C245 ME C218 Introduction to MEMS Design Fall 2008 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 94720 Lecture 2: Benefits
EE C245 ME C218 Introduction to MEMS Design Fall 2008 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 94720 Lecture 2: Benefits
EE C245 ME C218 Introduction to MEMS Design
 EE C45 ME C18 Introduction to MEMS Design Fall 008 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 9470 Lecture 7: Noise &
EE C45 ME C18 Introduction to MEMS Design Fall 008 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 9470 Lecture 7: Noise &
EE C245 ME C218 Introduction to MEMS Design Fall 2007
 EE C245 ME C218 Introduction to MEMS Design Fall 2007 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 94720 Lecture 1: Definition
EE C245 ME C218 Introduction to MEMS Design Fall 2007 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 94720 Lecture 1: Definition
EE C245 / ME C218 INTRODUCTION TO MEMS DESIGN FALL 2011 PROBLEM SET #2. Due (at 7 p.m.): Tuesday, Sept. 27, 2011, in the EE C245 HW box in 240 Cory.
: Tuesday, Sept. 27, 2011, in the EE C245 HW box in 240 Cory.") Issued: Tuesday, Sept. 13, 2011 PROBLEM SET #2 Due (at 7 p.m.): Tuesday, Sept. 27, 2011, in the EE C245 HW box in 240 Cory. 1. Below in Figure 1.1 is a description of a DRIE silicon etch using the Marvell
Issued: Tuesday, Sept. 13, 2011 PROBLEM SET #2 Due (at 7 p.m.): Tuesday, Sept. 27, 2011, in the EE C245 HW box in 240 Cory. 1. Below in Figure 1.1 is a description of a DRIE silicon etch using the Marvell
EE C245 ME C218 Introduction to MEMS Design
 EE C245 ME C218 Introduction to MEMS Design Fall 2008 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 94720 Lecture 1: Definition
EE C245 ME C218 Introduction to MEMS Design Fall 2008 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 94720 Lecture 1: Definition
MEMS in ECE at CMU. Gary K. Fedder
 MEMS in ECE at CMU Gary K. Fedder Department of Electrical and Computer Engineering and The Robotics Institute Carnegie Mellon University Pittsburgh, PA 15213-3890 fedder@ece.cmu.edu http://www.ece.cmu.edu/~mems
MEMS in ECE at CMU Gary K. Fedder Department of Electrical and Computer Engineering and The Robotics Institute Carnegie Mellon University Pittsburgh, PA 15213-3890 fedder@ece.cmu.edu http://www.ece.cmu.edu/~mems
EE C245 ME C218 Introduction to MEMS Design Fall 2010
 Instructor: Prof. Clark T.-C. Nguyen EE C245 ME C218 Introduction to MEMS Design Fall 2010 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley
Instructor: Prof. Clark T.-C. Nguyen EE C245 ME C218 Introduction to MEMS Design Fall 2010 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley
EE C245 ME C218 Introduction to MEMS Design Fall 2010
 Basic Concept: Scaling Guitar Strings EE C245 ME C218 ntroduction to MEMS Design Fall 21 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley
Basic Concept: Scaling Guitar Strings EE C245 ME C218 ntroduction to MEMS Design Fall 21 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley
Wafer-level Vacuum Packaged X and Y axis Gyroscope Using the Extended SBM Process for Ubiquitous Robot applications
 Proceedings of the 17th World Congress The International Federation of Automatic Control Wafer-level Vacuum Packaged X and Y axis Gyroscope Using the Extended SBM Process for Ubiquitous Robot applications
Proceedings of the 17th World Congress The International Federation of Automatic Control Wafer-level Vacuum Packaged X and Y axis Gyroscope Using the Extended SBM Process for Ubiquitous Robot applications
Design and Simulation of MEMS Comb Vibratory Gyroscope
 Design and Simulation of MEMS Comb Vibratory Gyroscope S.Yuvaraj 1, V.S.Krushnasamy 2 PG Student, Dept. of ICE, SRM University, Chennai, Tamil Nadu, India 1 Assistant professor,dept.of ICE, SRM University,Chennai,Tamil
Design and Simulation of MEMS Comb Vibratory Gyroscope S.Yuvaraj 1, V.S.Krushnasamy 2 PG Student, Dept. of ICE, SRM University, Chennai, Tamil Nadu, India 1 Assistant professor,dept.of ICE, SRM University,Chennai,Tamil
Micromechanical Circuits for Wireless Communications
 Micromechanical Circuits for Wireless Communications Clark T.-C. Nguyen Center for Integrated Microsystems Dept. of Electrical Engineering and Computer Science University of Michigan Ann Arbor, Michigan
Micromechanical Circuits for Wireless Communications Clark T.-C. Nguyen Center for Integrated Microsystems Dept. of Electrical Engineering and Computer Science University of Michigan Ann Arbor, Michigan
Keywords: piezoelectric, micro gyroscope, reference vibration, finite element
 2nd International Conference on Machinery, Materials Engineering, Chemical Engineering and Biotechnology (MMECEB 2015) Reference Vibration analysis of Piezoelectric Micromachined Modal Gyroscope Cong Zhao,
2nd International Conference on Machinery, Materials Engineering, Chemical Engineering and Biotechnology (MMECEB 2015) Reference Vibration analysis of Piezoelectric Micromachined Modal Gyroscope Cong Zhao,
Miniaturising Motion Energy Harvesters: Limits and Ways Around Them
 Miniaturising Motion Energy Harvesters: Limits and Ways Around Them Eric M. Yeatman Imperial College London Inertial Harvesters Mass mounted on a spring within a frame Frame attached to moving host (person,
Miniaturising Motion Energy Harvesters: Limits and Ways Around Them Eric M. Yeatman Imperial College London Inertial Harvesters Mass mounted on a spring within a frame Frame attached to moving host (person,
Last Name Girosco Given Name Pio ID Number
 Last Name Girosco Given Name Pio ID Number 0170130 Question n. 1 Which is the typical range of frequencies at which MEMS gyroscopes (as studied during the course) operate, and why? In case of mode-split
Last Name Girosco Given Name Pio ID Number 0170130 Question n. 1 Which is the typical range of frequencies at which MEMS gyroscopes (as studied during the course) operate, and why? In case of mode-split
MICRO YAW RATE SENSORS
 1 MICRO YAW RATE SENSORS FIELD OF THE INVENTION This invention relates to micro yaw rate sensors suitable for measuring yaw rate around its sensing axis. More particularly, to micro yaw rate sensors fabricated
1 MICRO YAW RATE SENSORS FIELD OF THE INVENTION This invention relates to micro yaw rate sensors suitable for measuring yaw rate around its sensing axis. More particularly, to micro yaw rate sensors fabricated
EE C245 ME C218 Introduction to MEMS Design Fall 2011
 EE C245/ME C218: ntrductin t MEMS Lecture 2m: Benefits f Scaling Lecture Outline EE C245 ME C218 ntrductin t MEMS Design Fall 211 Prf. Clark T.-C. Nguyen Reading: Senturia, Chapter 1 Lecture Tpics: Benefits
EE C245/ME C218: ntrductin t MEMS Lecture 2m: Benefits f Scaling Lecture Outline EE C245 ME C218 ntrductin t MEMS Design Fall 211 Prf. Clark T.-C. Nguyen Reading: Senturia, Chapter 1 Lecture Tpics: Benefits
Surface Micromachining
 Surface Micromachining An IC-Compatible Sensor Technology Bernhard E. Boser Berkeley Sensor & Actuator Center Dept. of Electrical Engineering and Computer Sciences University of California, Berkeley Sensor
Surface Micromachining An IC-Compatible Sensor Technology Bernhard E. Boser Berkeley Sensor & Actuator Center Dept. of Electrical Engineering and Computer Sciences University of California, Berkeley Sensor
Electrically coupled MEMS bandpass filters Part I: With coupling element
 Sensors and Actuators A 122 (2005) 307 316 Electrically coupled MEMS bandpass filters Part I: With coupling element Siavash Pourkamali, Farrokh Ayazi School of Electrical and Computer Engineering, Georgia
Sensors and Actuators A 122 (2005) 307 316 Electrically coupled MEMS bandpass filters Part I: With coupling element Siavash Pourkamali, Farrokh Ayazi School of Electrical and Computer Engineering, Georgia
RF MEMS for Low-Power Communications
 RF MEMS for Low-Power Communications Clark T.-C. Nguyen Center for Wireless Integrated Microsystems Dept. of Electrical Engineering and Computer Science University of Michigan Ann Arbor, Michigan 48109-2122
RF MEMS for Low-Power Communications Clark T.-C. Nguyen Center for Wireless Integrated Microsystems Dept. of Electrical Engineering and Computer Science University of Michigan Ann Arbor, Michigan 48109-2122
INF 5490 RF MEMS. LN10: Micromechanical filters. Spring 2011, Oddvar Søråsen Jan Erik Ramstad Department of Informatics, UoO
 INF 5490 RF MEMS LN10: Micromechanical filters Spring 2011, Oddvar Søråsen Jan Erik Ramstad Department of Informatics, UoO 1 Today s lecture Properties of mechanical filters Visualization and working principle
INF 5490 RF MEMS LN10: Micromechanical filters Spring 2011, Oddvar Søråsen Jan Erik Ramstad Department of Informatics, UoO 1 Today s lecture Properties of mechanical filters Visualization and working principle
the pilot valve effect of
 Actiive Feedback Control and Shunt Damping Example 3.2: A servomechanism incorporating a hydraulic relay with displacement feedback throughh a dashpot and spring assembly is shown below. [Control System
Actiive Feedback Control and Shunt Damping Example 3.2: A servomechanism incorporating a hydraulic relay with displacement feedback throughh a dashpot and spring assembly is shown below. [Control System
MEMS Technologies and Devices for Single-Chip RF Front-Ends
 MEMS Technologies and Devices for Single-Chip RF Front-Ends Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Science University of Michigan Ann Arbor, Michigan 48105-2122 CCMT 06 April 25,
MEMS Technologies and Devices for Single-Chip RF Front-Ends Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Science University of Michigan Ann Arbor, Michigan 48105-2122 CCMT 06 April 25,
In order to suppress coupled oscillation and drift and to minimize the resulting zero-rate drift, various devices have been reported employing indepen
 Distributed-Mass Micromachined Gyroscopes for Enhanced Mode-Decoupling Cenk Acar Microsystems Laboratory Mechanical and Aerospace Engineering Dept. University of California at Irvine Irvine, CA, USA cacar@uci.edu
Distributed-Mass Micromachined Gyroscopes for Enhanced Mode-Decoupling Cenk Acar Microsystems Laboratory Mechanical and Aerospace Engineering Dept. University of California at Irvine Irvine, CA, USA cacar@uci.edu
Lecture 020 ECE4430 Review II (1/5/04) Page 020-1
 Page 020-1") Lecture 020 ECE4430 Review II (1/5/04) Page 020-1 LECTURE 020 ECE 4430 REVIEW II (READING: GHLM - Chap. 2) Objective The objective of this presentation is: 1.) Identify the prerequisite material as taught
Lecture 020 ECE4430 Review II (1/5/04) Page 020-1 LECTURE 020 ECE 4430 REVIEW II (READING: GHLM - Chap. 2) Objective The objective of this presentation is: 1.) Identify the prerequisite material as taught
Lecture 020 ECE4430 Review II (1/5/04) Page 020-1
 Page 020-1") Lecture 020 ECE4430 Review II (1/5/04) Page 020-1 LECTURE 020 ECE 4430 REVIEW II (READING: GHLM - Chap. 2) Objective The objective of this presentation is: 1.) Identify the prerequisite material as taught
Lecture 020 ECE4430 Review II (1/5/04) Page 020-1 LECTURE 020 ECE 4430 REVIEW II (READING: GHLM - Chap. 2) Objective The objective of this presentation is: 1.) Identify the prerequisite material as taught
42.1: A Class of Micromachined Gyroscopes with
 4.1: A Class of Micromachined Gyroscopes with Increased Parametric Space Cenk Acar Microsystems Laboratory Mechanical and Aerospace Engineering Dept. University of California at Irvine Irvine, CA, USA
4.1: A Class of Micromachined Gyroscopes with Increased Parametric Space Cenk Acar Microsystems Laboratory Mechanical and Aerospace Engineering Dept. University of California at Irvine Irvine, CA, USA
Third Order Intermodulation Distortion in Capacitive-Gap Transduced Micromechanical Filters
 Third Order Intermodulation Distortion in Capacitive-Gap Transduced Micromechanical Filters Jalal Naghsh Nilchi, Ruonan Liu, Scott Li, Mehmet Akgul, Tristan O. Rocheleau, and Clark T.-C. Nguyen Berkeley
Third Order Intermodulation Distortion in Capacitive-Gap Transduced Micromechanical Filters Jalal Naghsh Nilchi, Ruonan Liu, Scott Li, Mehmet Akgul, Tristan O. Rocheleau, and Clark T.-C. Nguyen Berkeley
Lecture 10: Accelerometers (Part I)
") Lecture 0: Accelerometers (Part I) ADXL 50 (Formerly the original ADXL 50) ENE 5400, Spring 2004 Outline Performance analysis Capacitive sensing Circuit architectures Circuit techniques for non-ideality
Lecture 0: Accelerometers (Part I) ADXL 50 (Formerly the original ADXL 50) ENE 5400, Spring 2004 Outline Performance analysis Capacitive sensing Circuit architectures Circuit techniques for non-ideality
INF 5490 RF MEMS. L12: Micromechanical filters. S2008, Oddvar Søråsen Department of Informatics, UoO
 INF 5490 RF MEMS L12: Micromechanical filters S2008, Oddvar Søråsen Department of Informatics, UoO 1 Today s lecture Properties of mechanical filters Visualization and working principle Design, modeling
INF 5490 RF MEMS L12: Micromechanical filters S2008, Oddvar Søråsen Department of Informatics, UoO 1 Today s lecture Properties of mechanical filters Visualization and working principle Design, modeling
INF 5490 RF MEMS. LN10: Micromechanical filters. Spring 2012, Oddvar Søråsen Department of Informatics, UoO
 INF 5490 RF MEMS LN10: Micromechanical filters Spring 2012, Oddvar Søråsen Department of Informatics, UoO 1 Today s lecture Properties of mechanical filters Visualization and working principle Modeling
INF 5490 RF MEMS LN10: Micromechanical filters Spring 2012, Oddvar Søråsen Department of Informatics, UoO 1 Today s lecture Properties of mechanical filters Visualization and working principle Modeling
A Doubly Decoupled X-axis Vibrating Wheel Gyroscope
 19 Xue-Song Liu and Ya-Pu ZHAO* State Key Laboratory of Nonlinear Mechanics, Institute of Mechanics, Chinese Academy of Sciences Beijing 100190, People s Republic of China Abstract: In this paper, a doubly
19 Xue-Song Liu and Ya-Pu ZHAO* State Key Laboratory of Nonlinear Mechanics, Institute of Mechanics, Chinese Academy of Sciences Beijing 100190, People s Republic of China Abstract: In this paper, a doubly
Introduction to Microeletromechanical Systems (MEMS) Lecture 12 Topics. MEMS Overview
 Lecture 12 Topics. MEMS Overview") Introduction to Microeletromechanical Systems (MEMS) Lecture 2 Topics MEMS for Wireless Communication Components for Wireless Communication Mechanical/Electrical Systems Mechanical Resonators o Quality
Introduction to Microeletromechanical Systems (MEMS) Lecture 2 Topics MEMS for Wireless Communication Components for Wireless Communication Mechanical/Electrical Systems Mechanical Resonators o Quality
Process Technology to Fabricate High Performance MEMS on Top of Advanced LSI. Shuji Tanaka Tohoku University, Sendai, Japan
 Process Technology to Fabricate High Performance MEMS on Top of Advanced LSI Shuji Tanaka Tohoku University, Sendai, Japan 1 JSAP Integrated MEMS Technology Roadmap More than Moore: Diversification More
Process Technology to Fabricate High Performance MEMS on Top of Advanced LSI Shuji Tanaka Tohoku University, Sendai, Japan 1 JSAP Integrated MEMS Technology Roadmap More than Moore: Diversification More
MEMS Tuning-Fork Gyroscope
 EECS 425 Final Report, Group G MEMS Tuning Fork Gyroscope 1 MEMS Tuning-Fork Gyroscope Cody Myers, Brent Sabo, Timothy Vella, Jeffrey Yeung Abstract In this report, we describe the preliminary design,
EECS 425 Final Report, Group G MEMS Tuning Fork Gyroscope 1 MEMS Tuning-Fork Gyroscope Cody Myers, Brent Sabo, Timothy Vella, Jeffrey Yeung Abstract In this report, we describe the preliminary design,
Micro and Smart Systems
 Micro and Smart Systems Lecture - 39 (1)Packaging Pressure sensors (Continued from Lecture 38) (2)Micromachined Silicon Accelerometers Prof K.N.Bhat, ECE Department, IISc Bangalore email: knbhat@gmail.com
Micro and Smart Systems Lecture - 39 (1)Packaging Pressure sensors (Continued from Lecture 38) (2)Micromachined Silicon Accelerometers Prof K.N.Bhat, ECE Department, IISc Bangalore email: knbhat@gmail.com
Digitally Tuned Low Power Gyroscope
 Digitally Tuned Low Power Gyroscope Bernhard E. Boser & Chinwuba Ezekwe Berkeley Sensor & Actuator Center Dept. of Electrical Engineering and Computer Sciences University of California, Berkeley B. Boser
Digitally Tuned Low Power Gyroscope Bernhard E. Boser & Chinwuba Ezekwe Berkeley Sensor & Actuator Center Dept. of Electrical Engineering and Computer Sciences University of California, Berkeley B. Boser
420 Intro to VLSI Design
 Dept of Electrical and Computer Engineering 420 Intro to VLSI Design Lecture 0: Course Introduction and Overview Valencia M. Joyner Spring 2005 Getting Started Syllabus About the Instructor Labs, Problem
Dept of Electrical and Computer Engineering 420 Intro to VLSI Design Lecture 0: Course Introduction and Overview Valencia M. Joyner Spring 2005 Getting Started Syllabus About the Instructor Labs, Problem
ME 434 MEMS Tuning Fork Gyroscope Amanda Bristow Stephen Nary Travis Barton 12/9/10
 ME 434 MEMS Tuning Fork Gyroscope Amanda Bristow Stephen Nary Travis Barton 12/9/10 1 Abstract MEMS based gyroscopes have gained in popularity for use as rotation rate sensors in commercial products like
ME 434 MEMS Tuning Fork Gyroscope Amanda Bristow Stephen Nary Travis Barton 12/9/10 1 Abstract MEMS based gyroscopes have gained in popularity for use as rotation rate sensors in commercial products like
Lecture 0: Introduction
 Lecture 0: Introduction Introduction Integrated circuits: many transistors on one chip. Very Large Scale Integration (VLSI): bucketloads! Complementary Metal Oxide Semiconductor Fast, cheap, low power
Lecture 0: Introduction Introduction Integrated circuits: many transistors on one chip. Very Large Scale Integration (VLSI): bucketloads! Complementary Metal Oxide Semiconductor Fast, cheap, low power
MEMS. Platform. Solutions for Microsystems. Characterization
 MEMS Characterization Platform Solutions for Microsystems Characterization A new paradigm for MEMS characterization The MEMS Characterization Platform (MCP) is a new concept of laboratory instrumentation
MEMS Characterization Platform Solutions for Microsystems Characterization A new paradigm for MEMS characterization The MEMS Characterization Platform (MCP) is a new concept of laboratory instrumentation
Reference Diagram IDG-300. Coriolis Sense. Low-Pass Sensor. Coriolis Sense. Demodulator Y-RATE OUT YAGC R LPY C LPy ±10% EEPROM TRIM.
 FEATURES Integrated X- and Y-axis gyro on a single chip Factory trimmed full scale range of ±500 /sec Integrated low-pass filters High vibration rejection over a wide frequency range High cross-axis isolation
FEATURES Integrated X- and Y-axis gyro on a single chip Factory trimmed full scale range of ±500 /sec Integrated low-pass filters High vibration rejection over a wide frequency range High cross-axis isolation
MEMS Optical Scanner "ECO SCAN" Application Notes. Ver.0
 MEMS Optical Scanner "ECO SCAN" Application Notes Ver.0 Micro Electro Mechanical Systems Promotion Dept., Visionary Business Center The Nippon Signal Co., Ltd. 1 Preface This document summarizes precautions
MEMS Optical Scanner "ECO SCAN" Application Notes Ver.0 Micro Electro Mechanical Systems Promotion Dept., Visionary Business Center The Nippon Signal Co., Ltd. 1 Preface This document summarizes precautions
EE C247B ME C218. EE C245: Introduction to MEMS Design. Spring EE C247B/ME C218: Introduction to MEMS Lecture 3m: Benefits of Scaling II
 EE C247B/ME C218: ntroduction to MEMS Basic Concept: Scaling Guitar Strings Guitar String Vib. Amplitude EE C247B ME C218 ntroduction to MEMS Design Spring 2015 Prof. Clark T.- Freq. [Bannon 1996] Freq.
EE C247B/ME C218: ntroduction to MEMS Basic Concept: Scaling Guitar Strings Guitar String Vib. Amplitude EE C247B ME C218 ntroduction to MEMS Design Spring 2015 Prof. Clark T.- Freq. [Bannon 1996] Freq.
EE C245 - ME C218 Introduction to MEMS Design Fall Today s Lecture
 EE 45 ME 8 Introduction to MEMS Design Fall 003 Roger Howe and Thara Srinivasan Lecture 6 Micromechanical Resonators I Today s Lecture ircuit models for micromechanical resonators Microresonator oscillators:
EE 45 ME 8 Introduction to MEMS Design Fall 003 Roger Howe and Thara Srinivasan Lecture 6 Micromechanical Resonators I Today s Lecture ircuit models for micromechanical resonators Microresonator oscillators:
Active Vibration Isolation of an Unbalanced Machine Tool Spindle
 Active Vibration Isolation of an Unbalanced Machine Tool Spindle David. J. Hopkins, Paul Geraghty Lawrence Livermore National Laboratory 7000 East Ave, MS/L-792, Livermore, CA. 94550 Abstract Proper configurations
Active Vibration Isolation of an Unbalanced Machine Tool Spindle David. J. Hopkins, Paul Geraghty Lawrence Livermore National Laboratory 7000 East Ave, MS/L-792, Livermore, CA. 94550 Abstract Proper configurations
EE C245 - ME C218 Introduction to MEMS Design Fall Today s Lecture
 EE 45 ME 8 ntroduction to MEMS Design Fall 003 Roger Howe and Thara Srinivasan Lecture 6 Micromechanical Resonators EE 45 ME 8 Fall 003 Lecture 6 Today s Lecture ircuit models for micromechanical resonators
EE 45 ME 8 ntroduction to MEMS Design Fall 003 Roger Howe and Thara Srinivasan Lecture 6 Micromechanical Resonators EE 45 ME 8 Fall 003 Lecture 6 Today s Lecture ircuit models for micromechanical resonators
EE 5611 Introduction to Microelectronic Technologies Fall Thursday, September 04, 2014 Lecture 02
 EE 5611 Introduction to Microelectronic Technologies Fall 2014 Thursday, September 04, 2014 Lecture 02 1 Lecture Outline Review on semiconductor materials Review on microelectronic devices Example of microelectronic
EE 5611 Introduction to Microelectronic Technologies Fall 2014 Thursday, September 04, 2014 Lecture 02 1 Lecture Outline Review on semiconductor materials Review on microelectronic devices Example of microelectronic
EE4800 CMOS Digital IC Design & Analysis. Lecture 1 Introduction Zhuo Feng
 EE4800 CMOS Digital IC Design & Analysis Lecture 1 Introduction Zhuo Feng 1.1 Prof. Zhuo Feng Office: EERC 730 Phone: 487-3116 Email: zhuofeng@mtu.edu Class Website http://www.ece.mtu.edu/~zhuofeng/ee4800fall2010.html
EE4800 CMOS Digital IC Design & Analysis Lecture 1 Introduction Zhuo Feng 1.1 Prof. Zhuo Feng Office: EERC 730 Phone: 487-3116 Email: zhuofeng@mtu.edu Class Website http://www.ece.mtu.edu/~zhuofeng/ee4800fall2010.html
Silicon-Based Resonant Microsensors O. Brand, K. Naeli, K.S. Demirci, S. Truax, J.H. Seo, L.A. Beardslee
 Silicon-Based Resonant Microsensors O. Brand, K. Naeli, K.S. Demirci, S. Truax, J.H. Seo, L.A. Beardslee School of Electrical and Computer Engineering g Georgia Institute of Technology Atlanta, GA 30332-0250,
Silicon-Based Resonant Microsensors O. Brand, K. Naeli, K.S. Demirci, S. Truax, J.H. Seo, L.A. Beardslee School of Electrical and Computer Engineering g Georgia Institute of Technology Atlanta, GA 30332-0250,
FABRICATION OF CMOS INTEGRATED CIRCUITS. Dr. Mohammed M. Farag
 FABRICATION OF CMOS INTEGRATED CIRCUITS Dr. Mohammed M. Farag Outline Overview of CMOS Fabrication Processes The CMOS Fabrication Process Flow Design Rules Reference: Uyemura, John P. "Introduction to
FABRICATION OF CMOS INTEGRATED CIRCUITS Dr. Mohammed M. Farag Outline Overview of CMOS Fabrication Processes The CMOS Fabrication Process Flow Design Rules Reference: Uyemura, John P. "Introduction to
Towards a fully integrated optical gyroscope using whispering gallery modes resonators
 Towards a fully integrated optical gyroscope using whispering gallery modes resonators T. Amrane 1, J.-B. Jager 2, T. Jager 1, V. Calvo 2, J.-M. Leger 1 1 CEA, LETI, Grenoble, France. 2 CEA, INAC-SP2M
Towards a fully integrated optical gyroscope using whispering gallery modes resonators T. Amrane 1, J.-B. Jager 2, T. Jager 1, V. Calvo 2, J.-M. Leger 1 1 CEA, LETI, Grenoble, France. 2 CEA, INAC-SP2M
Fabrication, Testing and Characterization of MEMS Gyroscope
 Fabrication, Testing and Characterization of MEMS Gyroscope by Ridha Almikhlafi A thesis presented to the University of Waterloo in fulfillment of the thesis requirement for the degree of Master of Applied
Fabrication, Testing and Characterization of MEMS Gyroscope by Ridha Almikhlafi A thesis presented to the University of Waterloo in fulfillment of the thesis requirement for the degree of Master of Applied
Design and simulation of MEMS piezoelectric gyroscope
 Available online at www.scholarsresearchlibrary.com European Journal of Applied Engineering and Scientific Research, 2014, 3 (2):8-12 (http://scholarsresearchlibrary.com/archive.html) ISSN: 2278 0041 Design
Available online at www.scholarsresearchlibrary.com European Journal of Applied Engineering and Scientific Research, 2014, 3 (2):8-12 (http://scholarsresearchlibrary.com/archive.html) ISSN: 2278 0041 Design
Integrated Dual-Axis Gyro IDG-1004
 Integrated Dual-Axis Gyro NOT RECOMMENDED FOR NEW DESIGNS. PLEASE REFER TO THE IDG-25 FOR A FUTIONALLY- UPGRADED PRODUCT APPLICATIONS GPS Navigation Devices Robotics Electronic Toys Platform Stabilization
Integrated Dual-Axis Gyro NOT RECOMMENDED FOR NEW DESIGNS. PLEASE REFER TO THE IDG-25 FOR A FUTIONALLY- UPGRADED PRODUCT APPLICATIONS GPS Navigation Devices Robotics Electronic Toys Platform Stabilization
MODE-DECOUPLED MEMS GYROSCOPES WITH SILICON-ON-GLASS TECHNOLOGY
 MODE-DECOUPLED MEMS GYROSCOPES WITH SILICON-ON-GLASS TECHNOLOGY Said Emre Alper Tayfun Akin Department of Electrical and Electronics Engineering Middle East Technical University TR-06531, Balgat-Ankara
MODE-DECOUPLED MEMS GYROSCOPES WITH SILICON-ON-GLASS TECHNOLOGY Said Emre Alper Tayfun Akin Department of Electrical and Electronics Engineering Middle East Technical University TR-06531, Balgat-Ankara
CMP for More Than Moore
 2009 Levitronix Conference on CMP Gerfried Zwicker Fraunhofer Institute for Silicon Technology ISIT Itzehoe, Germany gerfried.zwicker@isit.fraunhofer.de Contents Moore s Law and More Than Moore Comparison:
2009 Levitronix Conference on CMP Gerfried Zwicker Fraunhofer Institute for Silicon Technology ISIT Itzehoe, Germany gerfried.zwicker@isit.fraunhofer.de Contents Moore s Law and More Than Moore Comparison:
MICROELECTROMECHANICAL systems (MEMS) A Single-Crystal Silicon Symmetrical and Decoupled MEMS Gyroscope on an Insulating Substrate
 A Single-Crystal Silicon Symmetrical and Decoupled MEMS Gyroscope on an Insulating Substrate") JOURNAL OF MICROELECTROMECHANICAL SYSTEMS, VOL. 14, NO. 4, AUGUST 2005 707 A Single-Crystal Silicon Symmetrical and Decoupled MEMS Gyroscope on an Insulating Substrate Said Emre Alper and Tayfun Akin,
JOURNAL OF MICROELECTROMECHANICAL SYSTEMS, VOL. 14, NO. 4, AUGUST 2005 707 A Single-Crystal Silicon Symmetrical and Decoupled MEMS Gyroscope on an Insulating Substrate Said Emre Alper and Tayfun Akin,
Oscillators. An oscillator may be described as a source of alternating voltage. It is different than amplifier.
 Oscillators An oscillator may be described as a source of alternating voltage. It is different than amplifier. An amplifier delivers an output signal whose waveform corresponds to the input signal but
Oscillators An oscillator may be described as a source of alternating voltage. It is different than amplifier. An amplifier delivers an output signal whose waveform corresponds to the input signal but
Part 2: Second order systems: cantilever response
 - cantilever response slide 1 Part 2: Second order systems: cantilever response Goals: Understand the behavior and how to characterize second order measurement systems Learn how to operate: function generator,
- cantilever response slide 1 Part 2: Second order systems: cantilever response Goals: Understand the behavior and how to characterize second order measurement systems Learn how to operate: function generator,
High-Q UHF Micromechanical Radial-Contour Mode Disk Resonators
 1298 JOURNAL OF MICROELECTROMECHANICAL SYSTEMS, VOL. 14, NO. 6, DECEMBER 2005 High-Q UHF Micromechanical Radial-Contour Mode Disk Resonators John R. Clark, Member, IEEE, Wan-Thai Hsu, Member, IEEE, Mohamed
1298 JOURNAL OF MICROELECTROMECHANICAL SYSTEMS, VOL. 14, NO. 6, DECEMBER 2005 High-Q UHF Micromechanical Radial-Contour Mode Disk Resonators John R. Clark, Member, IEEE, Wan-Thai Hsu, Member, IEEE, Mohamed
Overview. Tasks: 1.1. Realization of a direct coherent microwave-to-optical link
 Overview Optical cavity Microwave cavity Mechanical resonator Tasks: 1.1. Realization of a direct coherent microwave-to-optical link 1.2 Development of large gain-bandwidth product microwave amplifiers
Overview Optical cavity Microwave cavity Mechanical resonator Tasks: 1.1. Realization of a direct coherent microwave-to-optical link 1.2 Development of large gain-bandwidth product microwave amplifiers
Characterization of Rotational Mode Disk Resonator Quality Factors in Liquid
 Characterization of Rotational Mode Disk Resonator Quality Factors in Liquid Amir Rahafrooz and Siavash Pourkamali Department of Electrical and Computer Engineering University of Denver Denver, CO, USA
Characterization of Rotational Mode Disk Resonator Quality Factors in Liquid Amir Rahafrooz and Siavash Pourkamali Department of Electrical and Computer Engineering University of Denver Denver, CO, USA
Integrated Dual-Axis Gyro IDG-1215
 Integrated Dual-Axis Gyro FEATURES Integrated X- and Y-axis gyros on a single chip ±67 /s full-scale range 15m/ /s sensitivity Integrated amplifiers and low-pass filter Auto Zero function Integrated reset
Integrated Dual-Axis Gyro FEATURES Integrated X- and Y-axis gyros on a single chip ±67 /s full-scale range 15m/ /s sensitivity Integrated amplifiers and low-pass filter Auto Zero function Integrated reset
Yoshihiko ISOBE Hiroshi MUTO Tsuyoshi FUKADA Seiji FUJINO
 Yoshihiko ISOBE Hiroshi MUTO Tsuyoshi FUKADA Seiji FUJINO Increased performance requirements in terms of the environment, safety and comfort have recently been imposed on automobiles to ensure efficient
Yoshihiko ISOBE Hiroshi MUTO Tsuyoshi FUKADA Seiji FUJINO Increased performance requirements in terms of the environment, safety and comfort have recently been imposed on automobiles to ensure efficient
Bandwidth Optimization Design of a Multi Degree of Freedom MEMS Gyroscope
 Sensors 013, 13, 10550-10560; doi:10.3390/s130810550 Article OPEN ACCESS sensors ISSN 144-80 www.mdpi.com/journal/sensors Bandwidth Optimization Design of a Multi Degree of Freedom MEMS Gyroscope Chaowei
Sensors 013, 13, 10550-10560; doi:10.3390/s130810550 Article OPEN ACCESS sensors ISSN 144-80 www.mdpi.com/journal/sensors Bandwidth Optimization Design of a Multi Degree of Freedom MEMS Gyroscope Chaowei
Symmetrical and decoupled nickel microgyroscope on insulating substrate
 Sensors and Actuators A 115 (2004) 336 350 Symmetrical and decoupled nickel microgyroscope on insulating substrate Said Emre Alper, Tayfun Akin Department of Electrical and Electronics Engineering, Middle
Sensors and Actuators A 115 (2004) 336 350 Symmetrical and decoupled nickel microgyroscope on insulating substrate Said Emre Alper, Tayfun Akin Department of Electrical and Electronics Engineering, Middle
Outline: Introduction: What is SPM, history STM AFM Image treatment Advanced SPM techniques Applications in semiconductor research and industry
 1 Outline: Introduction: What is SPM, history STM AFM Image treatment Advanced SPM techniques Applications in semiconductor research and industry 2 Back to our solutions: The main problem: How to get nm
1 Outline: Introduction: What is SPM, history STM AFM Image treatment Advanced SPM techniques Applications in semiconductor research and industry 2 Back to our solutions: The main problem: How to get nm
Do all accelerometers behave the same? Meggitt-Endevco, Anthony Chu
 Do all accelerometers behave the same? Meggitt-Endevco, Anthony Chu A leader in design and manufacturing of accelerometers & pressure transducers, Meggitt Endevco strives to deliver product innovations
Do all accelerometers behave the same? Meggitt-Endevco, Anthony Chu A leader in design and manufacturing of accelerometers & pressure transducers, Meggitt Endevco strives to deliver product innovations
Electronic Instrumentation and Measurements
 Electronic Instrumentation and Measurements A fundamental part of many electromechanical systems is a measurement system that composed of four basic parts: Sensors Signal Conditioning Analog-to-Digital-Conversion
Electronic Instrumentation and Measurements A fundamental part of many electromechanical systems is a measurement system that composed of four basic parts: Sensors Signal Conditioning Analog-to-Digital-Conversion
The Air Bearing Throughput Edge By Kevin McCarthy, Chief Technology Officer
 159 Swanson Rd. Boxborough, MA 01719 Phone +1.508.475.3400 dovermotion.com The Air Bearing Throughput Edge By Kevin McCarthy, Chief Technology Officer In addition to the numerous advantages described in
159 Swanson Rd. Boxborough, MA 01719 Phone +1.508.475.3400 dovermotion.com The Air Bearing Throughput Edge By Kevin McCarthy, Chief Technology Officer In addition to the numerous advantages described in
Electrostatically Tunable Analog Single Crystal Silicon Fringing-Field MEMS Varactors
 Purdue University Purdue e-pubs Birck and NCN Publications Birck Nanotechnology Center 2009 Electrostatically Tunable Analog Single Crystal Silicon Fringing-Field MEMS Varactors Joshua A. Small Purdue
Purdue University Purdue e-pubs Birck and NCN Publications Birck Nanotechnology Center 2009 Electrostatically Tunable Analog Single Crystal Silicon Fringing-Field MEMS Varactors Joshua A. Small Purdue
EE 143 Microfabrication Technology Fall 2014
 EE 143 Microfabrication Technology Fall 2014 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 94720 EE 143: Microfabrication
EE 143 Microfabrication Technology Fall 2014 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 94720 EE 143: Microfabrication
Industrialization of Micro-Electro-Mechanical Systems. Werner Weber Infineon Technologies
 Industrialization of Micro-Electro-Mechanical Systems Werner Weber Infineon Technologies Semiconductor-based MEMS market MEMS Market 2004 (total 22.7 BUS$) Others mostly Digital Light Projection IR Sensors
Industrialization of Micro-Electro-Mechanical Systems Werner Weber Infineon Technologies Semiconductor-based MEMS market MEMS Market 2004 (total 22.7 BUS$) Others mostly Digital Light Projection IR Sensors
CHAPTER 9 BRIDGES, STRAIN GAGES AND SOME VARIABLE IMPEDANCE TRANSDUCERS
 CHPTE 9 BIDGES, STIN GGES ND SOME IBLE IMPEDNCE TNSDUCES Many transducers translate a change in the quantity you wish to measure into a change in impedance, i.e., resistance, capacitance or inductance.
CHPTE 9 BIDGES, STIN GGES ND SOME IBLE IMPEDNCE TNSDUCES Many transducers translate a change in the quantity you wish to measure into a change in impedance, i.e., resistance, capacitance or inductance.
UNIVERSITY OF UTAH ELECTRICAL ENGINEERING DEPARTMENT LABORATORY PROJECT NO. 3 DESIGN OF A MICROMOTOR DRIVER CIRCUIT
 UNIVERSITY OF UTAH ELECTRICAL ENGINEERING DEPARTMENT EE 1000 LABORATORY PROJECT NO. 3 DESIGN OF A MICROMOTOR DRIVER CIRCUIT 1. INTRODUCTION The following quote from the IEEE Spectrum (July, 1990, p. 29)
UNIVERSITY OF UTAH ELECTRICAL ENGINEERING DEPARTMENT EE 1000 LABORATORY PROJECT NO. 3 DESIGN OF A MICROMOTOR DRIVER CIRCUIT 1. INTRODUCTION The following quote from the IEEE Spectrum (July, 1990, p. 29)
MEMS Technologies for Communications
 MEMS Technologies for Communications Clark T.-C. Nguyen Program Manager, MPG/CSAC/MX Microsystems Technology Office () Defense Advanced Research Projects Agency Nanotech 03 Feb. 25, 2003 Outline Introduction:
MEMS Technologies for Communications Clark T.-C. Nguyen Program Manager, MPG/CSAC/MX Microsystems Technology Office () Defense Advanced Research Projects Agency Nanotech 03 Feb. 25, 2003 Outline Introduction:
Integrated Dual-Axis Gyro IDG-500
 Integrated Dual-Axis Gyro FEATURES Integrated X- and Y-axis gyros on a single chip Two separate outputs per axis for standard and high sensitivity: X-/Y-Out Pins: 500 /s full scale range 2.0m/ /s sensitivity
Integrated Dual-Axis Gyro FEATURES Integrated X- and Y-axis gyros on a single chip Two separate outputs per axis for standard and high sensitivity: X-/Y-Out Pins: 500 /s full scale range 2.0m/ /s sensitivity
Characterization of Silicon-based Ultrasonic Nozzles
 Tamkang Journal of Science and Engineering, Vol. 7, No. 2, pp. 123 127 (24) 123 Characterization of licon-based Ultrasonic Nozzles Y. L. Song 1,2 *, S. C. Tsai 1,3, Y. F. Chou 4, W. J. Chen 1, T. K. Tseng
Tamkang Journal of Science and Engineering, Vol. 7, No. 2, pp. 123 127 (24) 123 Characterization of licon-based Ultrasonic Nozzles Y. L. Song 1,2 *, S. C. Tsai 1,3, Y. F. Chou 4, W. J. Chen 1, T. K. Tseng
1. Introduction. 2. Concept. reflector. transduce r. node. Kraftmessung an verschiedenen Fluiden in akustischen Feldern
 1. Introduction The aim of this Praktikum is to familiarize with the concept and the equipment of acoustic levitation and to measure the forces exerted by an acoustic field on small spherical objects.
1. Introduction The aim of this Praktikum is to familiarize with the concept and the equipment of acoustic levitation and to measure the forces exerted by an acoustic field on small spherical objects.
Vertical Integration of MM-wave MMIC s and MEMS Antennas
 JOURNAL OF SEMICONDUCTOR TECHNOLOGY AND SCIENCE, VOL.6, NO.3, SEPTEMBER, 2006 169 Vertical Integration of MM-wave MMIC s and MEMS Antennas Youngwoo Kwon, Yong-Kweon Kim, Sanghyo Lee, and Jung-Mu Kim Abstract
JOURNAL OF SEMICONDUCTOR TECHNOLOGY AND SCIENCE, VOL.6, NO.3, SEPTEMBER, 2006 169 Vertical Integration of MM-wave MMIC s and MEMS Antennas Youngwoo Kwon, Yong-Kweon Kim, Sanghyo Lee, and Jung-Mu Kim Abstract
Model Series 400X User s Manual. DC-100 MHz Electro-Optic Phase Modulators
 Model Series 400X User s Manual DC-100 MHz Electro-Optic Phase Modulators 400412 Rev. D 2 Is a registered trademark of New Focus, Inc. Warranty New Focus, Inc. guarantees its products to be free of defects
Model Series 400X User s Manual DC-100 MHz Electro-Optic Phase Modulators 400412 Rev. D 2 Is a registered trademark of New Focus, Inc. Warranty New Focus, Inc. guarantees its products to be free of defects
Characteristics of Crystal. Piezoelectric effect of Quartz Crystal
 Characteristics of Crystal Piezoelectric effect of Quartz Crystal The quartz crystal has a character when the pressure is applied to the direction of the crystal axis, the electric change generates on
Characteristics of Crystal Piezoelectric effect of Quartz Crystal The quartz crystal has a character when the pressure is applied to the direction of the crystal axis, the electric change generates on
Advanced Nanoscale Metrology with AFM
 Advanced Nanoscale Metrology with AFM Sang-il Park Corp. SPM: the Key to the Nano World Initiated by the invention of STM in 1982. By G. Binnig, H. Rohrer, Ch. Gerber at IBM Zürich. Expanded by the invention
Advanced Nanoscale Metrology with AFM Sang-il Park Corp. SPM: the Key to the Nano World Initiated by the invention of STM in 1982. By G. Binnig, H. Rohrer, Ch. Gerber at IBM Zürich. Expanded by the invention
Lab 4. Crystal Oscillator
 Lab 4. Crystal Oscillator Modeling the Piezo Electric Quartz Crystal Most oscillators employed for RF and microwave applications use a resonator to set the frequency of oscillation. It is desirable to
Lab 4. Crystal Oscillator Modeling the Piezo Electric Quartz Crystal Most oscillators employed for RF and microwave applications use a resonator to set the frequency of oscillation. It is desirable to
On the axes of Fig. 4.1, sketch the variation with displacement x of the acceleration a of a particle undergoing simple harmonic motion.
 1 (a) (i) Define simple harmonic motion. (b)... On the axes of Fig. 4.1, sketch the variation with displacement x of the acceleration a of a particle undergoing simple harmonic motion. Fig. 4.1 A strip
1 (a) (i) Define simple harmonic motion. (b)... On the axes of Fig. 4.1, sketch the variation with displacement x of the acceleration a of a particle undergoing simple harmonic motion. Fig. 4.1 A strip
Recent Innovations in MEMS Sensors for PNT Applications
 Recent Innovations in MEMS Sensors for PNT Applications Stanford PNT Symposium 2017 Alissa M. Fitzgerald, Ph.D. Founder & CEO amf@amfitzgerald.com Overview Navigation Developments in MEMS gyroscope technology
Recent Innovations in MEMS Sensors for PNT Applications Stanford PNT Symposium 2017 Alissa M. Fitzgerald, Ph.D. Founder & CEO amf@amfitzgerald.com Overview Navigation Developments in MEMS gyroscope technology
Testing of Flexible Metamaterial RF Filters Implemented through Micromachining LCP Substrates. Jonathan Richard Robert Dean Michael Hamilton
 Testing of Flexible Metamaterial RF Filters Implemented through Micromachining LCP Substrates Jonathan Richard Robert Dean Michael Hamilton Metamaterials Definition Metamaterials exhibit interesting properties
Testing of Flexible Metamaterial RF Filters Implemented through Micromachining LCP Substrates Jonathan Richard Robert Dean Michael Hamilton Metamaterials Definition Metamaterials exhibit interesting properties
Ques on (2): [18 Marks] a) Draw the atrial synchronous Pacemaker block diagram and explain its operation. Benha University June 2013
![Ques on (2): [18 Marks] a) Draw the atrial synchronous Pacemaker block diagram and explain its operation. Benha University June 2013](/thumbs/87/96832478.jpg "Ques on (2): [18 Marks] a) Draw the atrial synchronous Pacemaker block diagram and explain its operation. Benha University June 2013") Benha University June 2013 Benha Faculty of Engineering Electrical Department Hospital Instrumentations (E472) 4 Th year (control) Dr.Waleed Abdel Aziz Salem Time: 3 Hrs Answer the following questions.
Benha University June 2013 Benha Faculty of Engineering Electrical Department Hospital Instrumentations (E472) 4 Th year (control) Dr.Waleed Abdel Aziz Salem Time: 3 Hrs Answer the following questions.
520 JOURNAL OF MICROELECTROMECHANICAL SYSTEMS, VOL. 14, NO. 3, JUNE 2005
 520 JOURNAL OF MICROELECTROMECHANICAL SYSTEMS, VOL. 14, NO. 3, JUNE 2005 An Approach for Increasing Drive-Mode Bandwidth of MEMS Vibratory Gyroscopes Cenk Acar and Andrei M. Shkel, Associate Member, IEEE,
520 JOURNAL OF MICROELECTROMECHANICAL SYSTEMS, VOL. 14, NO. 3, JUNE 2005 An Approach for Increasing Drive-Mode Bandwidth of MEMS Vibratory Gyroscopes Cenk Acar and Andrei M. Shkel, Associate Member, IEEE,
High Power RF MEMS Switch Technology
 High Power RF MEMS Switch Technology Invited Talk at 2005 SBMO/IEEE MTT-S International Conference on Microwave and Optoelectronics Conference Dr Jia-Sheng Hong Heriot-Watt University Edinburgh U.K. 1
High Power RF MEMS Switch Technology Invited Talk at 2005 SBMO/IEEE MTT-S International Conference on Microwave and Optoelectronics Conference Dr Jia-Sheng Hong Heriot-Watt University Edinburgh U.K. 1
An induced emf is the negative of a changing magnetic field. Similarly, a self-induced emf would be found by
 This is a study guide for Exam 4. You are expected to understand and be able to answer mathematical questions on the following topics. Chapter 32 Self-Induction and Induction While a battery creates an
This is a study guide for Exam 4. You are expected to understand and be able to answer mathematical questions on the following topics. Chapter 32 Self-Induction and Induction While a battery creates an
6.776 High Speed Communication Circuits and Systems Lecture 14 Voltage Controlled Oscillators
 6.776 High Speed Communication Circuits and Systems Lecture 14 Voltage Controlled Oscillators Massachusetts Institute of Technology March 29, 2005 Copyright 2005 by Michael H. Perrott VCO Design for Narrowband
6.776 High Speed Communication Circuits and Systems Lecture 14 Voltage Controlled Oscillators Massachusetts Institute of Technology March 29, 2005 Copyright 2005 by Michael H. Perrott VCO Design for Narrowband
New Type of RF Switches for Signal Frequencies of up to 75 GHz
 New Type of RF Switches for Signal Frequencies of up to 75 GHz Steffen Kurth Fraunhofer ENAS, Chemnitz, Germany Page 1 Contents Introduction and motivation RF MEMS technology Design and simulation Test
New Type of RF Switches for Signal Frequencies of up to 75 GHz Steffen Kurth Fraunhofer ENAS, Chemnitz, Germany Page 1 Contents Introduction and motivation RF MEMS technology Design and simulation Test
5. Transducers Definition and General Concept of Transducer Classification of Transducers
 5.1. Definition and General Concept of Definition The transducer is a device which converts one form of energy into another form. Examples: Mechanical transducer and Electrical transducer Electrical A
5.1. Definition and General Concept of Definition The transducer is a device which converts one form of energy into another form. Examples: Mechanical transducer and Electrical transducer Electrical A
Plasma Confinement by Pressure of Rotating Magnetic Field in Toroidal Device
 1 ICC/P5-41 Plasma Confinement by Pressure of Rotating Magnetic Field in Toroidal Device V. Svidzinski 1 1 FAR-TECH, Inc., San Diego, USA Corresponding Author: svidzinski@far-tech.com Abstract: Plasma
1 ICC/P5-41 Plasma Confinement by Pressure of Rotating Magnetic Field in Toroidal Device V. Svidzinski 1 1 FAR-TECH, Inc., San Diego, USA Corresponding Author: svidzinski@far-tech.com Abstract: Plasma
VARIABLE INDUCTANCE TRANSDUCER
 VARIABLE INDUCTANCE TRANSDUCER These are based on a change in the magnetic characteristic of an electrical circuit in response to a measurand which may be displacement, velocity, acceleration, etc. 1.
VARIABLE INDUCTANCE TRANSDUCER These are based on a change in the magnetic characteristic of an electrical circuit in response to a measurand which may be displacement, velocity, acceleration, etc. 1.
PROFILE CONTROL OF A BOROSILICATE-GLASS GROOVE FORMED BY DEEP REACTIVE ION ETCHING. Teruhisa Akashi and Yasuhiro Yoshimura
 Stresa, Italy, 25-27 April 2007 PROFILE CONTROL OF A BOROSILICATE-GLASS GROOVE FORMED BY DEEP REACTIVE ION ETCHING Teruhisa Akashi and Yasuhiro Yoshimura Mechanical Engineering Research Laboratory (MERL),
Stresa, Italy, 25-27 April 2007 PROFILE CONTROL OF A BOROSILICATE-GLASS GROOVE FORMED BY DEEP REACTIVE ION ETCHING Teruhisa Akashi and Yasuhiro Yoshimura Mechanical Engineering Research Laboratory (MERL),
Topic 3. CMOS Fabrication Process
 Topic 3 CMOS Fabrication Process Peter Cheung Department of Electrical & Electronic Engineering Imperial College London URL: www.ee.ic.ac.uk/pcheung/ E-mail: p.cheung@ic.ac.uk Lecture 3-1 Layout of a Inverter
Topic 3 CMOS Fabrication Process Peter Cheung Department of Electrical & Electronic Engineering Imperial College London URL: www.ee.ic.ac.uk/pcheung/ E-mail: p.cheung@ic.ac.uk Lecture 3-1 Layout of a Inverter