CIS 700/002: Special Topics: Acoustic Injection Attacks on MEMS Accelerometers
|
|
|
- Melina Brooks
- 6 years ago
- Views:
Transcription
1 CIS 700/002: Special Topics: Acoustic Injection Attacks on MEMS Accelerometers Thejas Kesari CIS 700/002: Security of EMBS/CPS/IoT Department of Computer and Information Science School of Engineering and Applied Science University of Pennsylvania 24 March 2017
2 The Idea Compromise digital integrity of Capacitive MEMS Accelerometer Deliver chosen digital values 2
 relates to the displacement of mass d(t) F=m a F= k s")
3 MEMS Accelerometer Sensing mass connected to springs that is displaced When accelerated, the displacement of mass creates an electrical signal due to change in capacitance Measured acceleration s(t) relates to the displacement of mass d(t) F=m a F= k s d 3
4 Prior Art Sensors can be tricked by maliciously fabricated physical properties An adversary could incapacitate drones equipped with MEMS gyroscopes using intentional sound noise Resonant frequency has been identified as a problem that causes the performance degradation of MEMS gyroscopes Acoustic interference can hence cause DoS attacks -Yunmok Son, et. al., Rocking Drones with Intentional Sound Noise on Gyroscopic Sensors, 24 th USENIX, August
5 MEMS Accelerometer If the acoustic frequency tuned correctly, it can vibrate the sensing mass altering sensor output The sensor output can also be altered in a predictable way Two problematic components in the signal conditioning path: Insecure LPF Insecure amplifier 5
6 MEMS Accelerometer Insecure LPF and Insecure Amplifier explain the root cause of DoS attacks Also, enabled design two more classes of attacks: Output biasing Output control 6
7 More Prior Art Defending against malicious acoustic interference by applying acoustic dampening materials (elastomers, microfibrous metallic cloth, felt, etc) ** Provide physical isolation from the noise *** Make the actuator and sensor operate in tandem, provide a challenge-response mechanism ^* **P. Soobramaney, Mitigation of the Effects of High Levels of High-Frequency Noise on MEMS Gyroscopes, Ph.D. dissertation, Auburn University, 2013 ***Yunmok Son, et. al., Rocking Drones with Intentional Sound Noise on Gyroscopic Sensors, 24 th USENIX, August 2015 ^*Y. Shoukry, et. al, Pycra: Physical challenge-response authentication for active sensors under spoofing attacks, in Proc. ACM CCS,
8 More Prior Art Impractical increases packaging size Not always applicable sensor must operate with an actuator in a closed loop system Insufficient not an exhaustive method and cannot filter out all interference 8
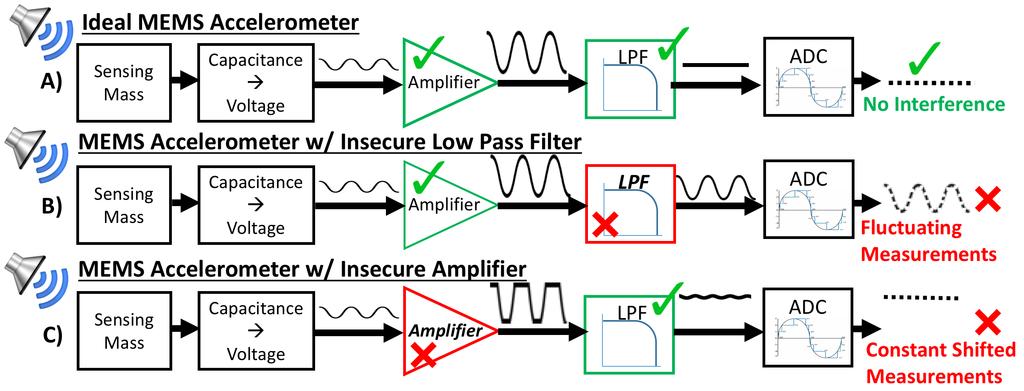
9 Architecture Additional processing is required for the electrical acceleration signals to interface with microprocessors Change in capacitance is converted to a voltage, amplified, filtered, and digitized Without stage D, aliasing can occur, enabling output biasing attacks Signal clipping at C can introduce a DC component into the acceleration signal, enabling output control attacks 9
10 Threat Model Attackers neither access the sensor readings directly nor physically touch the sensor Do not assume lunchtime attack, but assume he is able to reverse engineer a sample device to extract the exact accelerometer model and profile its behaviour under different amplitudes and frequencies Attacker is able to induce sound in the vicinity of the victim device in the audible frequency range 10
=s(t)+ A 1 A 0")
11 Forces from acoustic waves can also displace the mass True acceleration: s(t) Acoustic: s a (t) Attack Modeling For acoustic frequency F a, with amplitude A 0 and phase, the measured acceleration becomes s (t)=s(t)+ A 1 A 0 11

12 Attack Modeling 12

13 Attack Modeling 13
14 Maximize the impact s (t)=s(t)+ A 1 s a (t) Maximize the attenuation co-efficient A 1 Resonance! A 1 =1 at resonant frequencies 14
15 Hardware Deficiencies 15
16 Hardware Deficiencies True measurements: No signal clipping occurs; LPF attenuates high frequency acoustic acceleration signals Fluctuating False Measurements: No signal clipping; LPF does not completely attenuate HF acoustic signals (undersampled by ADC) Constant Shifted False Measurements: Signal clipping occurs and introduces a non-zero DC component into the amplified signal. Secure LPF passes the DC signals and block HF. 16
17 Finding Resonant Frequency A sensor at rest should measure constant acceleration of 0 g along the X and Y axes and 1 g along the Z axis If at a particular frequency, output measurements are fluctuating or constantly shifted, then that is the resonant frequency By sweeping an acoustic frequency range and acquiring several acceleration measurements at each frequency, both scenarios can be observed 17
18 Finding Resonant Frequency: Results Both instances of the same sensor behaved identically Resonant frequencies can fall in a range, not a single value Some sensors have multiple resonant frequencies Some sensors have resonant frequencies which result in all combinations of constant shifted or fluctuating Most sensors that were not affected by acoustic interference are physically larger than those that were 18
19 Output Biasing Attack Pertains to accelerometers that experience fluctuating false measurements at their resonant frequencies due to insecure LPF To perform this attack, step one: Stabilize fluctuating false measurements to constant ones by shifting the acoustic resonant frequency to induce a DC alias at the ADC. How? How? Signal aliasing. Recall: Nyquist sampling theorem 19

20 Output Biasing Attack Signal aliasing: Misinterpretation of an analog signal caused by digitizing it with inadequate sampling rate 20
21 Output Biasing Attack To perform this attack, step two: Reshape the desired output signal by modulating it on top of the acoustic resonant frequency. How? AM and PM Signal Modulation is used to transmit arbitrary information signals over another carrier signal 21
=a sin (2πft+ )")
22 Output Biasing Attack Sinusoidal Carrier f c (t)=a sin (2πft+ ) 22
23 F samp is fixed Output Biasing Attack Resonant frequencies might be a range: frequency deviation f e Acoustic frequency: F a = F res + f e (find f e such that the sum is still within resonance) Then choose AM or PM to further shape the output signal 23
24 Output Biasing Attack 24
25 Output Control Attack Applicable to accelerometers that exhibit constant shifted false measurements at their resonant frequencies due to insecure amplifiers To perform this attack: reshape the output signal by modulating it over resonant frequency Achieving fine grain control requires AM 25

26 Output Control Attack 26
 while an output control attack (C) class indicates constant falsified measurements are observed (insecure")
27 Controlling Accelerometer Output Under resonant acoustic interference, an output biasing attack (B) class indicates a sensor s falsified measurements fluctuate (insecure LPF) while an output control attack (C) class indicates constant falsified measurements are observed (insecure amplifier) 27

28 Attacking Embedded Devices: Fitbit 28
29 Attacking Embedded Devices: Galaxy S5 29
30 Defence: Hardware Design Secure LPF: A properly designed LPF should have a cut-off frequency of less than half of the ADC sampling rate Secure Amplifier: Amplifier that can accept large amplitude inputs. Pre-filter acoustic resonant frequencies prior to amplification Use of acoustic dampening materials 30

31 Defence: Software Design Randomized sampling: Instead of setting ADC sampling rate fixed, sample at random intervals prevents attacker from inducing a DC alias 180⁰ Out-of-Phase Sampling: Attenuates acceleration signals with frequencies around the resonant frequency 31
32 References T. Trippel, et. al., WALNUT: Waging Doubt on the Integrity of MEMS Accelerometers with Acoustic Injection Attacks, 2017 P. Soobramaney, Mitigation of the Effects of High Levels of High-Frequency Noise on MEMS Gyroscopes, 2013 Yunmok Son, et. al., Rocking Drones with Intentional Sound Noise on Gyroscopic Sensors, 2015 Y. Shoukry, et. al., Pycra: Physical challenge-response authentication for active sensors under spoofing attacks,
Rocking Drones with Intentional Sound Noise on Gyroscopic Sensors
 USENIX Security Symposium 2015 Rocking Drones with Intentional Sound Noise on Gyroscopic Sensors 2015. 08. 14. Yunmok Son, Hocheol Shin, Dongkwan Kim, Youngseok Park, Juhwan Noh, Kibum Choi, Jungwoo Choi,
USENIX Security Symposium 2015 Rocking Drones with Intentional Sound Noise on Gyroscopic Sensors 2015. 08. 14. Yunmok Son, Hocheol Shin, Dongkwan Kim, Youngseok Park, Juhwan Noh, Kibum Choi, Jungwoo Choi,
SONIC GUN TO SMART DEVICES YOUR DEVICES LOSE CONTROL UNDER ULTRASOUND/SOUND
 SONIC GUN TO SMART DEVICES YOUR DEVICES LOSE CONTROL UNDER ULTRASOUND/SOUND Authors Wang, Zhengbo & Wang, Kang Alibaba Security Yang, Bo CAICT Li, Shangyuan Tsinghua University Pan, Aimin Alibaba Security
SONIC GUN TO SMART DEVICES YOUR DEVICES LOSE CONTROL UNDER ULTRASOUND/SOUND Authors Wang, Zhengbo & Wang, Kang Alibaba Security Yang, Bo CAICT Li, Shangyuan Tsinghua University Pan, Aimin Alibaba Security
SONIC GUN TO SMART DEVICES YOUR DEVICES LOSE CONTROL UNDER ULTRASOUND/SOUND
 SONIC GUN TO SMART DEVICES YOUR DEVICES LOSE CONTROL UNDER ULTRASOUND/SOUND Authors Wang, Zhengbo & Wang, Kang Alibaba Security Yang, Bo CAICT Li, Shangyuan Tsinghua University Pan, Aimin Alibaba Security
SONIC GUN TO SMART DEVICES YOUR DEVICES LOSE CONTROL UNDER ULTRASOUND/SOUND Authors Wang, Zhengbo & Wang, Kang Alibaba Security Yang, Bo CAICT Li, Shangyuan Tsinghua University Pan, Aimin Alibaba Security
Hacking Sensors. Yongdae Kim
 Hacking Sensors Yongdae Kim SysSec@KAIST Sensor q Sensor = An electrical device To measure physical properties of surrounding environment Passive and active sensors Passive infrared motion sensor magnetometer
Hacking Sensors Yongdae Kim SysSec@KAIST Sensor q Sensor = An electrical device To measure physical properties of surrounding environment Passive and active sensors Passive infrared motion sensor magnetometer
two computers. 2- Providing a channel between them for transmitting and receiving the signals through it.
 1. Introduction: Communication is the process of transmitting the messages that carrying information, where the two computers can be communicated with each other if the two conditions are available: 1-
1. Introduction: Communication is the process of transmitting the messages that carrying information, where the two computers can be communicated with each other if the two conditions are available: 1-
Capacitive Versus Thermal MEMS for High-Vibration Applications James Fennelly
 Capacitive Versus Thermal MEMS for High-Vibration Applications James Fennelly Design engineers involved in the development of heavy equipment that operate in high shock and vibration environments need
Capacitive Versus Thermal MEMS for High-Vibration Applications James Fennelly Design engineers involved in the development of heavy equipment that operate in high shock and vibration environments need
Analogue Interfacing. What is a signal? Continuous vs. Discrete Time. Continuous time signals
 Analogue Interfacing What is a signal? Signal: Function of one or more independent variable(s) such as space or time Examples include images and speech Continuous vs. Discrete Time Continuous time signals
Analogue Interfacing What is a signal? Signal: Function of one or more independent variable(s) such as space or time Examples include images and speech Continuous vs. Discrete Time Continuous time signals
System Inputs, Physical Modeling, and Time & Frequency Domains
 System Inputs, Physical Modeling, and Time & Frequency Domains There are three topics that require more discussion at this point of our study. They are: Classification of System Inputs, Physical Modeling,
System Inputs, Physical Modeling, and Time & Frequency Domains There are three topics that require more discussion at this point of our study. They are: Classification of System Inputs, Physical Modeling,
MECE 3320 Measurements & Instrumentation. Data Acquisition
 MECE 3320 Measurements & Instrumentation Data Acquisition Dr. Isaac Choutapalli Department of Mechanical Engineering University of Texas Pan American Sampling Concepts 1 f s t Sampling Rate f s 2 f m or
MECE 3320 Measurements & Instrumentation Data Acquisition Dr. Isaac Choutapalli Department of Mechanical Engineering University of Texas Pan American Sampling Concepts 1 f s t Sampling Rate f s 2 f m or
ELG3336 Design of Mechatronics System
 ELG3336 Design of Mechatronics System Elements of a Data Acquisition System 2 Analog Signal Data Acquisition Hardware Your Signal Data Acquisition DAQ Device System Computer Cable Terminal Block Data Acquisition
ELG3336 Design of Mechatronics System Elements of a Data Acquisition System 2 Analog Signal Data Acquisition Hardware Your Signal Data Acquisition DAQ Device System Computer Cable Terminal Block Data Acquisition
ni.com Sensor Measurement Fundamentals Series
 Sensor Measurement Fundamentals Series Introduction to Data Acquisition Basics and Terminology Litkei Márton District Sales Manager National Instruments What Is Data Acquisition (DAQ)? 3 Why Measure? Engineers
Sensor Measurement Fundamentals Series Introduction to Data Acquisition Basics and Terminology Litkei Márton District Sales Manager National Instruments What Is Data Acquisition (DAQ)? 3 Why Measure? Engineers
II Year (04 Semester) EE6403 Discrete Time Systems and Signal Processing
 EE6403 Discrete Time Systems and Signal Processing") Class Subject Code Subject II Year (04 Semester) EE6403 Discrete Time Systems and Signal Processing 1.CONTENT LIST: Introduction to Unit I - Signals and Systems 2. SKILLS ADDRESSED: Listening 3. OBJECTIVE
Class Subject Code Subject II Year (04 Semester) EE6403 Discrete Time Systems and Signal Processing 1.CONTENT LIST: Introduction to Unit I - Signals and Systems 2. SKILLS ADDRESSED: Listening 3. OBJECTIVE
Lecture 10: Accelerometers (Part I)
") Lecture 0: Accelerometers (Part I) ADXL 50 (Formerly the original ADXL 50) ENE 5400, Spring 2004 Outline Performance analysis Capacitive sensing Circuit architectures Circuit techniques for non-ideality
Lecture 0: Accelerometers (Part I) ADXL 50 (Formerly the original ADXL 50) ENE 5400, Spring 2004 Outline Performance analysis Capacitive sensing Circuit architectures Circuit techniques for non-ideality
EE 230 Lecture 39. Data Converters. Time and Amplitude Quantization
 EE 230 Lecture 39 Data Converters Time and Amplitude Quantization Review from Last Time: Time Quantization How often must a signal be sampled so that enough information about the original signal is available
EE 230 Lecture 39 Data Converters Time and Amplitude Quantization Review from Last Time: Time Quantization How often must a signal be sampled so that enough information about the original signal is available
Radio Receiver Architectures and Analysis
 Radio Receiver Architectures and Analysis Robert Wilson December 6, 01 Abstract This article discusses some common receiver architectures and analyzes some of the impairments that apply to each. 1 Contents
Radio Receiver Architectures and Analysis Robert Wilson December 6, 01 Abstract This article discusses some common receiver architectures and analyzes some of the impairments that apply to each. 1 Contents
Integrated Dual-Axis Gyro IDG-1004
 Integrated Dual-Axis Gyro NOT RECOMMENDED FOR NEW DESIGNS. PLEASE REFER TO THE IDG-25 FOR A FUTIONALLY- UPGRADED PRODUCT APPLICATIONS GPS Navigation Devices Robotics Electronic Toys Platform Stabilization
Integrated Dual-Axis Gyro NOT RECOMMENDED FOR NEW DESIGNS. PLEASE REFER TO THE IDG-25 FOR A FUTIONALLY- UPGRADED PRODUCT APPLICATIONS GPS Navigation Devices Robotics Electronic Toys Platform Stabilization
Integrated Dual-Axis Gyro IDG-500
 Integrated Dual-Axis Gyro FEATURES Integrated X- and Y-axis gyros on a single chip Two separate outputs per axis for standard and high sensitivity: X-/Y-Out Pins: 500 /s full scale range 2.0m/ /s sensitivity
Integrated Dual-Axis Gyro FEATURES Integrated X- and Y-axis gyros on a single chip Two separate outputs per axis for standard and high sensitivity: X-/Y-Out Pins: 500 /s full scale range 2.0m/ /s sensitivity
Rocking Drones with Intentional Sound Noise on Gyroscopic Sensors
 Rocking Drones with Intentional Sound Noise on Gyroscopic Sensors Yunmok Son, Hocheol Shin, Dongkwan Kim, Youngseok Park, Juhwan Noh, Kibum Choi, Jungwoo Choi, and Yongdae Kim, Korea Advanced Institute
Rocking Drones with Intentional Sound Noise on Gyroscopic Sensors Yunmok Son, Hocheol Shin, Dongkwan Kim, Youngseok Park, Juhwan Noh, Kibum Choi, Jungwoo Choi, and Yongdae Kim, Korea Advanced Institute
Capacitive MEMS accelerometer for condition monitoring
 Capacitive MEMS accelerometer for condition monitoring Alessandra Di Pietro, Giuseppe Rotondo, Alessandro Faulisi. STMicroelectronics 1. Introduction Predictive maintenance (PdM) is a key component of
Capacitive MEMS accelerometer for condition monitoring Alessandra Di Pietro, Giuseppe Rotondo, Alessandro Faulisi. STMicroelectronics 1. Introduction Predictive maintenance (PdM) is a key component of
Systematical Methods to Counter Drones in Controlled Manners
 Systematical Methods to Counter Drones in Controlled Manners Wenxin Chen, Garrett Johnson, Yingfei Dong Dept. of Electrical Engineering University of Hawaii 1 System Models u Physical system y Controller
Systematical Methods to Counter Drones in Controlled Manners Wenxin Chen, Garrett Johnson, Yingfei Dong Dept. of Electrical Engineering University of Hawaii 1 System Models u Physical system y Controller
NINTH INTERNATIONAL CONGRESS ON SOUND AND VIBRATION, ICSV9 ACTIVE VIBRATION ISOLATION OF DIESEL ENGINES IN SHIPS
 Page number: 1 NINTH INTERNATIONAL CONGRESS ON SOUND AND VIBRATION, ICSV9 ACTIVE VIBRATION ISOLATION OF DIESEL ENGINES IN SHIPS Xun Li, Ben S. Cazzolato and Colin H. Hansen Department of Mechanical Engineering,
Page number: 1 NINTH INTERNATIONAL CONGRESS ON SOUND AND VIBRATION, ICSV9 ACTIVE VIBRATION ISOLATION OF DIESEL ENGINES IN SHIPS Xun Li, Ben S. Cazzolato and Colin H. Hansen Department of Mechanical Engineering,
Digitally Tuned Low Power Gyroscope
 Digitally Tuned Low Power Gyroscope Bernhard E. Boser & Chinwuba Ezekwe Berkeley Sensor & Actuator Center Dept. of Electrical Engineering and Computer Sciences University of California, Berkeley B. Boser
Digitally Tuned Low Power Gyroscope Bernhard E. Boser & Chinwuba Ezekwe Berkeley Sensor & Actuator Center Dept. of Electrical Engineering and Computer Sciences University of California, Berkeley B. Boser
Master Degree in Electronic Engineering
 Master Degree in Electronic Engineering Analog and telecommunication electronic course (ATLCE-01NWM) Miniproject: Baseband signal transmission techniques Name: LI. XINRUI E-mail: s219989@studenti.polito.it
Master Degree in Electronic Engineering Analog and telecommunication electronic course (ATLCE-01NWM) Miniproject: Baseband signal transmission techniques Name: LI. XINRUI E-mail: s219989@studenti.polito.it
Development of Control Algorithm for Ring Laser Gyroscope
 International Journal of Scientific and Research Publications, Volume 2, Issue 10, October 2012 1 Development of Control Algorithm for Ring Laser Gyroscope P. Shakira Begum, N. Neelima Department of Electronics
International Journal of Scientific and Research Publications, Volume 2, Issue 10, October 2012 1 Development of Control Algorithm for Ring Laser Gyroscope P. Shakira Begum, N. Neelima Department of Electronics
There are four possible reasons that justify directional or horizontal drilling:
 APPLICATION NOTE Accelerometers for Drilling Oil and gas extraction have tremendously evolved over the last century. The need to dig wells ever more deeply has required new processes and technologies.
APPLICATION NOTE Accelerometers for Drilling Oil and gas extraction have tremendously evolved over the last century. The need to dig wells ever more deeply has required new processes and technologies.
Reference Diagram IDG-300. Coriolis Sense. Low-Pass Sensor. Coriolis Sense. Demodulator Y-RATE OUT YAGC R LPY C LPy ±10% EEPROM TRIM.
 FEATURES Integrated X- and Y-axis gyro on a single chip Factory trimmed full scale range of ±500 /sec Integrated low-pass filters High vibration rejection over a wide frequency range High cross-axis isolation
FEATURES Integrated X- and Y-axis gyro on a single chip Factory trimmed full scale range of ±500 /sec Integrated low-pass filters High vibration rejection over a wide frequency range High cross-axis isolation
Digitally controlled Active Noise Reduction with integrated Speech Communication
 Digitally controlled Active Noise Reduction with integrated Speech Communication Herman J.M. Steeneken and Jan Verhave TNO Human Factors, Soesterberg, The Netherlands herman@steeneken.com ABSTRACT Active
Digitally controlled Active Noise Reduction with integrated Speech Communication Herman J.M. Steeneken and Jan Verhave TNO Human Factors, Soesterberg, The Netherlands herman@steeneken.com ABSTRACT Active
Quartz Lock Loop (QLL) For Robust GNSS Operation in High Vibration Environments
 For Robust GNSS Operation in High Vibration Environments") Quartz Lock Loop (QLL) For Robust GNSS Operation in High Vibration Environments A Topcon white paper written by Doug Langen Topcon Positioning Systems, Inc. 7400 National Drive Livermore, CA 94550 USA
Quartz Lock Loop (QLL) For Robust GNSS Operation in High Vibration Environments A Topcon white paper written by Doug Langen Topcon Positioning Systems, Inc. 7400 National Drive Livermore, CA 94550 USA
There is growing interest in the oil and gas industry to
 Coordinated by JEFF DEERE JOHN GIBSON, FOREST LIN, ALEXANDRE EGRETEAU, and JULIEN MEUNIER, CGGVeritas MALCOLM LANSLEY, Sercel There is growing interest in the oil and gas industry to improve the quality
Coordinated by JEFF DEERE JOHN GIBSON, FOREST LIN, ALEXANDRE EGRETEAU, and JULIEN MEUNIER, CGGVeritas MALCOLM LANSLEY, Sercel There is growing interest in the oil and gas industry to improve the quality
AGN 008 Vibration DESCRIPTION. Cummins Generator Technologies manufacture ac generators (alternators) to ensure compliance with BS 5000, Part 3.
 to ensure compliance with BS 5000, Part 3.") Application Guidance Notes: Technical Information from Cummins Generator Technologies AGN 008 Vibration DESCRIPTION Cummins Generator Technologies manufacture ac generators (alternators) to ensure compliance
Application Guidance Notes: Technical Information from Cummins Generator Technologies AGN 008 Vibration DESCRIPTION Cummins Generator Technologies manufacture ac generators (alternators) to ensure compliance
TUNED AMPLIFIERS. Tank circuits.
 Tank circuits. TUNED AMPLIFIERS Analysis of single tuned amplifier, Double tuned, stagger tuned amplifiers. Instability of tuned amplifiers, stabilization techniques, Narrow band neutralization using coil,
Tank circuits. TUNED AMPLIFIERS Analysis of single tuned amplifier, Double tuned, stagger tuned amplifiers. Instability of tuned amplifiers, stabilization techniques, Narrow band neutralization using coil,
Last Name Girosco Given Name Pio ID Number
 Last Name Girosco Given Name Pio ID Number 0170130 Question n. 1 Which is the typical range of frequencies at which MEMS gyroscopes (as studied during the course) operate, and why? In case of mode-split
Last Name Girosco Given Name Pio ID Number 0170130 Question n. 1 Which is the typical range of frequencies at which MEMS gyroscopes (as studied during the course) operate, and why? In case of mode-split
Dynamic Angle Estimation
 Dynamic Angle Estimation with Inertial MEMS Analog Devices Bob Scannell Mark Looney Agenda Sensor to angle basics Accelerometer basics Accelerometer behaviors Gyroscope basics Gyroscope behaviors Key factors
Dynamic Angle Estimation with Inertial MEMS Analog Devices Bob Scannell Mark Looney Agenda Sensor to angle basics Accelerometer basics Accelerometer behaviors Gyroscope basics Gyroscope behaviors Key factors
DATA ANALYSIS FOR VALVE LEAK DETECTION OF NUCLEAR POWER PLANT SAFETY CRITICAL COMPONENTS
 DATA ANALYSIS FOR VALVE LEAK DETECTION OF NUCLEAR POWER PLANT SAFETY CRITICAL COMPONENTS Jung-Taek Kim, Hyeonmin Kim, Wan Man Park Korea Atomic Energy Research Institute 145 Daedeok-daero, Yuseong-gu,
DATA ANALYSIS FOR VALVE LEAK DETECTION OF NUCLEAR POWER PLANT SAFETY CRITICAL COMPONENTS Jung-Taek Kim, Hyeonmin Kim, Wan Man Park Korea Atomic Energy Research Institute 145 Daedeok-daero, Yuseong-gu,
FFT Analyzer. Gianfranco Miele, Ph.D
 FFT Analyzer Gianfranco Miele, Ph.D www.eng.docente.unicas.it/gianfranco_miele g.miele@unicas.it Introduction It is a measurement instrument that evaluates the spectrum of a time domain signal applying
FFT Analyzer Gianfranco Miele, Ph.D www.eng.docente.unicas.it/gianfranco_miele g.miele@unicas.it Introduction It is a measurement instrument that evaluates the spectrum of a time domain signal applying
Developer Techniques Sessions
 1 Developer Techniques Sessions Physical Measurements and Signal Processing Control Systems Logging and Networking 2 Abstract This session covers the technologies and configuration of a physical measurement
1 Developer Techniques Sessions Physical Measurements and Signal Processing Control Systems Logging and Networking 2 Abstract This session covers the technologies and configuration of a physical measurement
Digital Signal Processing. VO Embedded Systems Engineering Armin Wasicek WS 2009/10
 Digital Signal Processing VO Embedded Systems Engineering Armin Wasicek WS 2009/10 Overview Signals and Systems Processing of Signals Display of Signals Digital Signal Processors Common Signal Processing
Digital Signal Processing VO Embedded Systems Engineering Armin Wasicek WS 2009/10 Overview Signals and Systems Processing of Signals Display of Signals Digital Signal Processors Common Signal Processing
Panca Mudji Rahardjo, ST.MT. Electrical Engineering - UB
 Panca Mudji Rahardjo, ST.MT. Electrical Engineering - UB A sensor is a device that converts a physical phenomenon into an electrical signal. As such, sensors represent part of the interface between the
Panca Mudji Rahardjo, ST.MT. Electrical Engineering - UB A sensor is a device that converts a physical phenomenon into an electrical signal. As such, sensors represent part of the interface between the
Analog-Digital Interface
 Analog-Digital Interface Tuesday 24 November 15 Summary Previous Class Dependability Today: Redundancy Error Correcting Codes Analog-Digital Interface Converters, Sensors / Actuators Sampling DSP Frequency
Analog-Digital Interface Tuesday 24 November 15 Summary Previous Class Dependability Today: Redundancy Error Correcting Codes Analog-Digital Interface Converters, Sensors / Actuators Sampling DSP Frequency
Active Vibration Isolation of an Unbalanced Machine Tool Spindle
 Active Vibration Isolation of an Unbalanced Machine Tool Spindle David. J. Hopkins, Paul Geraghty Lawrence Livermore National Laboratory 7000 East Ave, MS/L-792, Livermore, CA. 94550 Abstract Proper configurations
Active Vibration Isolation of an Unbalanced Machine Tool Spindle David. J. Hopkins, Paul Geraghty Lawrence Livermore National Laboratory 7000 East Ave, MS/L-792, Livermore, CA. 94550 Abstract Proper configurations
About the Tutorial. Audience. Prerequisites. Copyright & Disclaimer. Linear Integrated Circuits Applications
 About the Tutorial Linear Integrated Circuits are solid state analog devices that can operate over a continuous range of input signals. Theoretically, they are characterized by an infinite number of operating
About the Tutorial Linear Integrated Circuits are solid state analog devices that can operate over a continuous range of input signals. Theoretically, they are characterized by an infinite number of operating
Data acquisition and instrumentation. Data acquisition
 Data acquisition and instrumentation START Lecture Sam Sadeghi Data acquisition 1 Humanistic Intelligence Body as a transducer,, data acquisition and signal processing machine Analysis of physiological
Data acquisition and instrumentation START Lecture Sam Sadeghi Data acquisition 1 Humanistic Intelligence Body as a transducer,, data acquisition and signal processing machine Analysis of physiological
Module 1: Introduction to Experimental Techniques Lecture 2: Sources of error. The Lecture Contains: Sources of Error in Measurement
 The Lecture Contains: Sources of Error in Measurement Signal-To-Noise Ratio Analog-to-Digital Conversion of Measurement Data A/D Conversion Digitalization Errors due to A/D Conversion file:///g /optical_measurement/lecture2/2_1.htm[5/7/2012
The Lecture Contains: Sources of Error in Measurement Signal-To-Noise Ratio Analog-to-Digital Conversion of Measurement Data A/D Conversion Digitalization Errors due to A/D Conversion file:///g /optical_measurement/lecture2/2_1.htm[5/7/2012
Fig m Telescope
 Taming the 1.2 m Telescope Steven Griffin, Matt Edwards, Dave Greenwald, Daryn Kono, Dennis Liang and Kirk Lohnes The Boeing Company Virginia Wright and Earl Spillar Air Force Research Laboratory ABSTRACT
Taming the 1.2 m Telescope Steven Griffin, Matt Edwards, Dave Greenwald, Daryn Kono, Dennis Liang and Kirk Lohnes The Boeing Company Virginia Wright and Earl Spillar Air Force Research Laboratory ABSTRACT
Chapter 7. Introduction. Analog Signal and Discrete Time Series. Sampling, Digital Devices, and Data Acquisition
 Chapter 7 Sampling, Digital Devices, and Data Acquisition Material from Theory and Design for Mechanical Measurements; Figliola, Third Edition Introduction Integrating analog electrical transducers with
Chapter 7 Sampling, Digital Devices, and Data Acquisition Material from Theory and Design for Mechanical Measurements; Figliola, Third Edition Introduction Integrating analog electrical transducers with
Module 4 TEST SYSTEM Part 2. SHAKING TABLE CONTROLLER ASSOCIATED SOFTWARES Dr. J.C. QUEVAL, CEA/Saclay
 Module 4 TEST SYSTEM Part 2 SHAKING TABLE CONTROLLER ASSOCIATED SOFTWARES Dr. J.C. QUEVAL, CEA/Saclay DEN/DM2S/SEMT/EMSI 11/03/2010 1 2 Electronic command Basic closed loop control The basic closed loop
Module 4 TEST SYSTEM Part 2 SHAKING TABLE CONTROLLER ASSOCIATED SOFTWARES Dr. J.C. QUEVAL, CEA/Saclay DEN/DM2S/SEMT/EMSI 11/03/2010 1 2 Electronic command Basic closed loop control The basic closed loop
EEE 432 Measurement and Instrumentation
 EEE 432 Measurement and Instrumentation Lecture 6 Measurement noise and signal processing Prof. Dr. Murat Aşkar İzmir University of Economics Dept. of Electrical and Electronics Engineering Measurement
EEE 432 Measurement and Instrumentation Lecture 6 Measurement noise and signal processing Prof. Dr. Murat Aşkar İzmir University of Economics Dept. of Electrical and Electronics Engineering Measurement
Digital Signal Processing +
 Digital Signal Processing + Nikil Dutt UC Irvine ICS 212 Winter 2005 + Material adapted from Tony Givargis & Rajesh Gupta Templates from Prabhat Mishra ICS212 WQ05 (Dutt) DSP 1 Introduction Any interesting
Digital Signal Processing + Nikil Dutt UC Irvine ICS 212 Winter 2005 + Material adapted from Tony Givargis & Rajesh Gupta Templates from Prabhat Mishra ICS212 WQ05 (Dutt) DSP 1 Introduction Any interesting
Technical note. Impedance analysis techniques
 Impedance analysis techniques Brian Sayers Solartron Analytical, Farnborough, UK. Technical Note: TNMTS01 1. Introduction The frequency response analyzer developed for the ModuLab MTS materials test system
Impedance analysis techniques Brian Sayers Solartron Analytical, Farnborough, UK. Technical Note: TNMTS01 1. Introduction The frequency response analyzer developed for the ModuLab MTS materials test system
A Real-Time Regulator, Turbine and Alternator Test Bench for Ensuring Generators Under Test Contribute to Whole System Stability
 A Real-Time Regulator, Turbine and Alternator Test Bench for Ensuring Generators Under Test Contribute to Whole System Stability Marc Langevin, eng., Ph.D.*. Marc Soullière, tech.** Jean Bélanger, eng.***
A Real-Time Regulator, Turbine and Alternator Test Bench for Ensuring Generators Under Test Contribute to Whole System Stability Marc Langevin, eng., Ph.D.*. Marc Soullière, tech.** Jean Bélanger, eng.***
UNIT 2. Q.1) Describe the functioning of standard signal generator. Ans. Electronic Measurements & Instrumentation
 Describe the functioning of standard signal generator. Ans. Electronic Measurements & Instrumentation") UNIT 2 Q.1) Describe the functioning of standard signal generator Ans. STANDARD SIGNAL GENERATOR A standard signal generator produces known and controllable voltages. It is used as power source for the
UNIT 2 Q.1) Describe the functioning of standard signal generator Ans. STANDARD SIGNAL GENERATOR A standard signal generator produces known and controllable voltages. It is used as power source for the
UNIT III Data Acquisition & Microcontroller System. Mr. Manoj Rajale
 UNIT III Data Acquisition & Microcontroller System Mr. Manoj Rajale Syllabus Interfacing of Sensors / Actuators to DAQ system, Bit width, Sampling theorem, Sampling Frequency, Aliasing, Sample and hold
UNIT III Data Acquisition & Microcontroller System Mr. Manoj Rajale Syllabus Interfacing of Sensors / Actuators to DAQ system, Bit width, Sampling theorem, Sampling Frequency, Aliasing, Sample and hold
EECS240 Spring Advanced Analog Integrated Circuits Lecture 1: Introduction. Elad Alon Dept. of EECS
 EECS240 Spring 2009 Advanced Analog Integrated Circuits Lecture 1: Introduction Elad Alon Dept. of EECS Course Focus Focus is on analog design Typically: Specs circuit topology layout Will learn spec-driven
EECS240 Spring 2009 Advanced Analog Integrated Circuits Lecture 1: Introduction Elad Alon Dept. of EECS Course Focus Focus is on analog design Typically: Specs circuit topology layout Will learn spec-driven
Music 270a: Fundamentals of Digital Audio and Discrete-Time Signals
 Music 270a: Fundamentals of Digital Audio and Discrete-Time Signals Tamara Smyth, trsmyth@ucsd.edu Department of Music, University of California, San Diego October 3, 2016 1 Continuous vs. Discrete signals
Music 270a: Fundamentals of Digital Audio and Discrete-Time Signals Tamara Smyth, trsmyth@ucsd.edu Department of Music, University of California, San Diego October 3, 2016 1 Continuous vs. Discrete signals
Lab 4. Crystal Oscillator
 Lab 4. Crystal Oscillator Modeling the Piezo Electric Quartz Crystal Most oscillators employed for RF and microwave applications use a resonator to set the frequency of oscillation. It is desirable to
Lab 4. Crystal Oscillator Modeling the Piezo Electric Quartz Crystal Most oscillators employed for RF and microwave applications use a resonator to set the frequency of oscillation. It is desirable to
CMPT 318: Lecture 4 Fundamentals of Digital Audio, Discrete-Time Signals
 CMPT 318: Lecture 4 Fundamentals of Digital Audio, Discrete-Time Signals Tamara Smyth, tamaras@cs.sfu.ca School of Computing Science, Simon Fraser University January 16, 2006 1 Continuous vs. Discrete
CMPT 318: Lecture 4 Fundamentals of Digital Audio, Discrete-Time Signals Tamara Smyth, tamaras@cs.sfu.ca School of Computing Science, Simon Fraser University January 16, 2006 1 Continuous vs. Discrete
Receiver Architectures
 Receiver Architectures Modules: VCO (2), Quadrature Utilities (2), Utilities, Adder, Multiplier, Phase Shifter (2), Tuneable LPF (2), 100-kHz Channel Filters, Audio Oscillator, Noise Generator, Speech,
Receiver Architectures Modules: VCO (2), Quadrature Utilities (2), Utilities, Adder, Multiplier, Phase Shifter (2), Tuneable LPF (2), 100-kHz Channel Filters, Audio Oscillator, Noise Generator, Speech,
Teaching Staff. EECS240 Spring Course Focus. Administrative. Course Goal. Lecture Notes. Elad s office hours
 EECS240 Spring 2012 Advanced Analog Integrated Circuits Lecture 1: Introduction Teaching Staff Elad s office hours 519 Cory Hall Tues. and Thurs. 11am-12pm (right after class) GSI: Pierluigi Nuzzo Weekly
EECS240 Spring 2012 Advanced Analog Integrated Circuits Lecture 1: Introduction Teaching Staff Elad s office hours 519 Cory Hall Tues. and Thurs. 11am-12pm (right after class) GSI: Pierluigi Nuzzo Weekly
UNIT-3. Electronic Measurements & Instrumentation
 UNIT-3 1. Draw the Block Schematic of AF Wave analyzer and explain its principle and Working? ANS: The wave analyzer consists of a very narrow pass-band filter section which can Be tuned to a particular
UNIT-3 1. Draw the Block Schematic of AF Wave analyzer and explain its principle and Working? ANS: The wave analyzer consists of a very narrow pass-band filter section which can Be tuned to a particular
Continuous vs. Discrete signals. Sampling. Analog to Digital Conversion. CMPT 368: Lecture 4 Fundamentals of Digital Audio, Discrete-Time Signals
 Continuous vs. Discrete signals CMPT 368: Lecture 4 Fundamentals of Digital Audio, Discrete-Time Signals Tamara Smyth, tamaras@cs.sfu.ca School of Computing Science, Simon Fraser University January 22,
Continuous vs. Discrete signals CMPT 368: Lecture 4 Fundamentals of Digital Audio, Discrete-Time Signals Tamara Smyth, tamaras@cs.sfu.ca School of Computing Science, Simon Fraser University January 22,
430. The Research System for Vibration Analysis in Domestic Installation Pipes
 430. The Research System for Vibration Analysis in Domestic Installation Pipes R. Ramanauskas, D. Gailius, V. Augutis Kaunas University of Technology, Studentu str. 50, LT-51424, Kaunas, Lithuania e-mail:
430. The Research System for Vibration Analysis in Domestic Installation Pipes R. Ramanauskas, D. Gailius, V. Augutis Kaunas University of Technology, Studentu str. 50, LT-51424, Kaunas, Lithuania e-mail:
Integrated Dual-Axis Gyro IDG-1215
 Integrated Dual-Axis Gyro FEATURES Integrated X- and Y-axis gyros on a single chip ±67 /s full-scale range 15m/ /s sensitivity Integrated amplifiers and low-pass filter Auto Zero function Integrated reset
Integrated Dual-Axis Gyro FEATURES Integrated X- and Y-axis gyros on a single chip ±67 /s full-scale range 15m/ /s sensitivity Integrated amplifiers and low-pass filter Auto Zero function Integrated reset
Design of Class F Power Amplifiers Using Cree GaN HEMTs and Microwave Office Software to Optimize Gain, Efficiency, and Stability
 White Paper Design of Class F Power Amplifiers Using Cree GaN HEMTs and Microwave Office Software to Optimize Gain, Efficiency, and Stability Overview This white paper explores the design of power amplifiers
White Paper Design of Class F Power Amplifiers Using Cree GaN HEMTs and Microwave Office Software to Optimize Gain, Efficiency, and Stability Overview This white paper explores the design of power amplifiers
Spectrum. Additive Synthesis. Additive Synthesis Caveat. Music 270a: Modulation
 Spectrum Music 7a: Modulation Tamara Smyth, trsmyth@ucsd.edu Department of Music, University of California, San Diego (UCSD) October 3, 7 When sinusoids of different frequencies are added together, the
Spectrum Music 7a: Modulation Tamara Smyth, trsmyth@ucsd.edu Department of Music, University of California, San Diego (UCSD) October 3, 7 When sinusoids of different frequencies are added together, the
Lecture 7 Frequency Modulation
 Lecture 7 Frequency Modulation Fundamentals of Digital Signal Processing Spring, 2012 Wei-Ta Chu 2012/3/15 1 Time-Frequency Spectrum We have seen that a wide range of interesting waveforms can be synthesized
Lecture 7 Frequency Modulation Fundamentals of Digital Signal Processing Spring, 2012 Wei-Ta Chu 2012/3/15 1 Time-Frequency Spectrum We have seen that a wide range of interesting waveforms can be synthesized
3D Distortion Measurement (DIS)
") 3D Distortion Measurement (DIS) Module of the R&D SYSTEM S4 FEATURES Voltage and frequency sweep Steady-state measurement Single-tone or two-tone excitation signal DC-component, magnitude and phase of
3D Distortion Measurement (DIS) Module of the R&D SYSTEM S4 FEATURES Voltage and frequency sweep Steady-state measurement Single-tone or two-tone excitation signal DC-component, magnitude and phase of
Vintage Radio Alignment: What It Is and How to Do It
 Vintage Radio Alignment: What It Is and How to Do It Copyright 2009 Bret s Old Radios Bret Menassa Member: ARCI, VRPS, OKVRC Presented at Radiofest 2009, Willowbrook,, IL Vibrations A musical instrument
Vintage Radio Alignment: What It Is and How to Do It Copyright 2009 Bret s Old Radios Bret Menassa Member: ARCI, VRPS, OKVRC Presented at Radiofest 2009, Willowbrook,, IL Vibrations A musical instrument
PRACTICAL PROBLEMS INVOLVING PHASE NOISE MEASUREMENTS
 33rdAnnual Precise Time and Time Interval (P77 1)Meeting PRACTICAL PROBLEMS INVOLVING PHASE NOISE MEASUREMENTS Warren F. Walls Femtosecond Systems, Inc. 4894 Van Gordon St., Ste. 301-N Wheat Ridge, CO
33rdAnnual Precise Time and Time Interval (P77 1)Meeting PRACTICAL PROBLEMS INVOLVING PHASE NOISE MEASUREMENTS Warren F. Walls Femtosecond Systems, Inc. 4894 Van Gordon St., Ste. 301-N Wheat Ridge, CO
Differential Amplifier : input. resistance. Differential amplifiers are widely used in engineering instrumentation
 Differential Amplifier : input resistance Differential amplifiers are widely used in engineering instrumentation Differential Amplifier : input resistance v 2 v 1 ir 1 ir 1 2iR 1 R in v 2 i v 1 2R 1 Differential
Differential Amplifier : input resistance Differential amplifiers are widely used in engineering instrumentation Differential Amplifier : input resistance v 2 v 1 ir 1 ir 1 2iR 1 R in v 2 i v 1 2R 1 Differential
(i) Sine sweep (ii) Sine beat (iii) Time history (iv) Continuous sine
 Sine sweep (ii) Sine beat (iii) Time history (iv) Continuous sine") A description is given of one way to implement an earthquake test where the test severities are specified by the sine-beat method. The test is done by using a biaxial computer aided servohydraulic test
A description is given of one way to implement an earthquake test where the test severities are specified by the sine-beat method. The test is done by using a biaxial computer aided servohydraulic test
Introduction to Embedded Systems
 Introduction to Embedded Systems Edward A. Lee & Sanjit Seshia UC Berkeley EECS 124 Spring 2008 Copyright 2008, Edward A. Lee & Sanjit Seshia, All rights reserved Lecture 3: Sensors and Actuators Sensors
Introduction to Embedded Systems Edward A. Lee & Sanjit Seshia UC Berkeley EECS 124 Spring 2008 Copyright 2008, Edward A. Lee & Sanjit Seshia, All rights reserved Lecture 3: Sensors and Actuators Sensors
The case for longer sweeps in vibrator acquisition Malcolm Lansley, Sercel, John Gibson, Forest Lin, Alexandre Egreteau and Julien Meunier, CGGVeritas
 The case for longer sweeps in vibrator acquisition Malcolm Lansley, Sercel, John Gibson, Forest Lin, Alexandre Egreteau and Julien Meunier, CGGVeritas There is growing interest in the oil and gas industry
The case for longer sweeps in vibrator acquisition Malcolm Lansley, Sercel, John Gibson, Forest Lin, Alexandre Egreteau and Julien Meunier, CGGVeritas There is growing interest in the oil and gas industry
ESE 150 Lab 04: The Discrete Fourier Transform (DFT)
") LAB 04 In this lab we will do the following: 1. Use Matlab to perform the Fourier Transform on sampled data in the time domain, converting it to the frequency domain 2. Add two sinewaves together of differing
LAB 04 In this lab we will do the following: 1. Use Matlab to perform the Fourier Transform on sampled data in the time domain, converting it to the frequency domain 2. Add two sinewaves together of differing
TE 302 DISCRETE SIGNALS AND SYSTEMS. Chapter 1: INTRODUCTION
 TE 302 DISCRETE SIGNALS AND SYSTEMS Study on the behavior and processing of information bearing functions as they are currently used in human communication and the systems involved. Chapter 1: INTRODUCTION
TE 302 DISCRETE SIGNALS AND SYSTEMS Study on the behavior and processing of information bearing functions as they are currently used in human communication and the systems involved. Chapter 1: INTRODUCTION
Lab 4. Crystal Oscillator
 Lab 4. Crystal Oscillator Modeling the Piezo Electric Quartz Crystal Most oscillators employed for RF and microwave applications use a resonator to set the frequency of oscillation. It is desirable to
Lab 4. Crystal Oscillator Modeling the Piezo Electric Quartz Crystal Most oscillators employed for RF and microwave applications use a resonator to set the frequency of oscillation. It is desirable to
Assessing the likelihood of GNSS spoofing attacks on RPAS
 Assessing the likelihood of GNSS spoofing attacks on RPAS Mike Maarse UvA/NLR 30-06-2016 Mike Maarse (UvA/NLR) RP2 Presentation 30-06-2016 1 / 25 Introduction Motivation/relevance Growing number of RPAS
Assessing the likelihood of GNSS spoofing attacks on RPAS Mike Maarse UvA/NLR 30-06-2016 Mike Maarse (UvA/NLR) RP2 Presentation 30-06-2016 1 / 25 Introduction Motivation/relevance Growing number of RPAS
Lab course Analog Part of a State-of-the-Art Mobile Radio Receiver
 Communication Technology Laboratory Wireless Communications Group Prof. Dr. A. Wittneben ETH Zurich, ETF, Sternwartstrasse 7, 8092 Zurich Tel 41 44 632 36 11 Fax 41 44 632 12 09 Lab course Analog Part
Communication Technology Laboratory Wireless Communications Group Prof. Dr. A. Wittneben ETH Zurich, ETF, Sternwartstrasse 7, 8092 Zurich Tel 41 44 632 36 11 Fax 41 44 632 12 09 Lab course Analog Part
Lab 2A: Introduction to Sensing and Data Acquisition
 Lab 2A: Introduction to Sensing and Data Acquisition Prof. R.G. Longoria Department of Mechanical Engineering The University of Texas at Austin June 12, 2014 1 Lab 2A 2 Sensors 3 DAQ 4 Experimentation
Lab 2A: Introduction to Sensing and Data Acquisition Prof. R.G. Longoria Department of Mechanical Engineering The University of Texas at Austin June 12, 2014 1 Lab 2A 2 Sensors 3 DAQ 4 Experimentation
COVENANT UNIVERSITY NIGERIA TUTORIAL KIT OMEGA SEMESTER PROGRAMME: MECHANICAL ENGINEERING
 COVENANT UNIVERSITY NIGERIA TUTORIAL KIT OMEGA SEMESTER PROGRAMME: MECHANICAL ENGINEERING COURSE: MCE 527 DISCLAIMER The contents of this document are intended for practice and leaning purposes at the
COVENANT UNIVERSITY NIGERIA TUTORIAL KIT OMEGA SEMESTER PROGRAMME: MECHANICAL ENGINEERING COURSE: MCE 527 DISCLAIMER The contents of this document are intended for practice and leaning purposes at the
1. Explain how Doppler direction is identified with FMCW radar. Fig Block diagram of FM-CW radar. f b (up) = f r - f d. f b (down) = f r + f d
 = f r - f d. f b (down) = f r + f d") 1. Explain how Doppler direction is identified with FMCW radar. A block diagram illustrating the principle of the FM-CW radar is shown in Fig. 4.1.1 A portion of the transmitter signal acts as the reference
1. Explain how Doppler direction is identified with FMCW radar. A block diagram illustrating the principle of the FM-CW radar is shown in Fig. 4.1.1 A portion of the transmitter signal acts as the reference
PYROTECHNIC SHOCK AND RANDOM VIBRATION EFFECTS ON CRYSTAL OSCILLATORS
 PYROTECHNIC SHOCK AND RANDOM VIBRATION EFFECTS ON CRYSTAL OSCILLATORS James W. Carwell CMC Electronics Cincinnati, Space Products Mason, OH 45040 ABSTRACT Today s telemetry specifications are requiring
PYROTECHNIC SHOCK AND RANDOM VIBRATION EFFECTS ON CRYSTAL OSCILLATORS James W. Carwell CMC Electronics Cincinnati, Space Products Mason, OH 45040 ABSTRACT Today s telemetry specifications are requiring
An induced emf is the negative of a changing magnetic field. Similarly, a self-induced emf would be found by
 This is a study guide for Exam 4. You are expected to understand and be able to answer mathematical questions on the following topics. Chapter 32 Self-Induction and Induction While a battery creates an
This is a study guide for Exam 4. You are expected to understand and be able to answer mathematical questions on the following topics. Chapter 32 Self-Induction and Induction While a battery creates an
ACCURACY JUNGLE TRUE OR FALSE?
 1 ACCURACY JUNGLE TRUE OR FALSE? Steve Pellarin and Albert Berdugo Teletronics Technology Corporation Newtown, PA USA Abstract Today s advanced vehicles demand high performance data acquisition systems
1 ACCURACY JUNGLE TRUE OR FALSE? Steve Pellarin and Albert Berdugo Teletronics Technology Corporation Newtown, PA USA Abstract Today s advanced vehicles demand high performance data acquisition systems
The VIRGO Environmental Monitoring System
 The VIRGO Environmental Monitoring System R. De Rosa University of Napoli - Federico II and INFN - Napoli Signaux, Bruits, Problèmes Inverses INRA - Nice, 05-05-2008 - Slow Monitoring System - Environmental
The VIRGO Environmental Monitoring System R. De Rosa University of Napoli - Federico II and INFN - Napoli Signaux, Bruits, Problèmes Inverses INRA - Nice, 05-05-2008 - Slow Monitoring System - Environmental
STATION NUMBER: LAB SECTION: Filters. LAB 6: Filters ELECTRICAL ENGINEERING 43/100 INTRODUCTION TO MICROELECTRONIC CIRCUITS
 Lab 6: Filters YOUR EE43/100 NAME: Spring 2013 YOUR PARTNER S NAME: YOUR SID: YOUR PARTNER S SID: STATION NUMBER: LAB SECTION: Filters LAB 6: Filters Pre- Lab GSI Sign- Off: Pre- Lab: /40 Lab: /60 Total:
Lab 6: Filters YOUR EE43/100 NAME: Spring 2013 YOUR PARTNER S NAME: YOUR SID: YOUR PARTNER S SID: STATION NUMBER: LAB SECTION: Filters LAB 6: Filters Pre- Lab GSI Sign- Off: Pre- Lab: /40 Lab: /60 Total:
NEVER TRUST YOUR INPUTS: CAUSING 'CATASTROPHIC PHYSICAL CONSEQUENCES' FROM THE SENSOR (OR HOW TO FOOL ADC)
") NEVER TRUST YOUR INPUTS: CAUSING 'CATASTROPHIC PHYSICAL CONSEQUENCES' FROM THE SENSOR (OR HOW TO FOOL ADC) ; CAT /DEV/USER Alexander @dark_k3y Bolshev, Ph.D. Security Researcher @ IOActive Assistant Professor
NEVER TRUST YOUR INPUTS: CAUSING 'CATASTROPHIC PHYSICAL CONSEQUENCES' FROM THE SENSOR (OR HOW TO FOOL ADC) ; CAT /DEV/USER Alexander @dark_k3y Bolshev, Ph.D. Security Researcher @ IOActive Assistant Professor
Chapter 2 The Test Benches
 Chapter 2 The Test Benches 2.1 An Active Hydraulic Suspension System Using Feedback Compensation The structure of the active hydraulic suspension (active isolation configuration) is presented in Fig. 2.1.
Chapter 2 The Test Benches 2.1 An Active Hydraulic Suspension System Using Feedback Compensation The structure of the active hydraulic suspension (active isolation configuration) is presented in Fig. 2.1.
Transmission Fundamentals
 College of Computer & Information Science Wireless Networks Northeastern University Lecture 1 Transmission Fundamentals Signals Data rate and bandwidth Nyquist sampling theorem Shannon capacity theorem
College of Computer & Information Science Wireless Networks Northeastern University Lecture 1 Transmission Fundamentals Signals Data rate and bandwidth Nyquist sampling theorem Shannon capacity theorem
The Virgo detector. L. Rolland LAPP-Annecy GraSPA summer school L. Rolland GraSPA2013 Annecy le Vieux
 The Virgo detector The Virgo detector L. Rolland LAPP-Annecy GraSPA summer school 2013 1 Table of contents Principles Effect of GW on free fall masses Basic detection principle overview Are the Virgo mirrors
The Virgo detector The Virgo detector L. Rolland LAPP-Annecy GraSPA summer school 2013 1 Table of contents Principles Effect of GW on free fall masses Basic detection principle overview Are the Virgo mirrors
Haptic Feedback Technology
 Haptic Feedback Technology ECE480: Design Team 4 Application Note Michael Greene Abstract: With the daily interactions between humans and their surrounding technology growing exponentially, the development
Haptic Feedback Technology ECE480: Design Team 4 Application Note Michael Greene Abstract: With the daily interactions between humans and their surrounding technology growing exponentially, the development
Design IV. E232 Spring 07
 Design IV Spring 07 Class 8 Bruce McNair bmcnair@stevens.edu 8-1/38 Computerized Data Acquisition Measurement system architecture System under test sensor sensor sensor sensor signal conditioning signal
Design IV Spring 07 Class 8 Bruce McNair bmcnair@stevens.edu 8-1/38 Computerized Data Acquisition Measurement system architecture System under test sensor sensor sensor sensor signal conditioning signal
Fourier Signal Analysis
 Part 1B Experimental Engineering Integrated Coursework Location: Baker Building South Wing Mechanics Lab Experiment A4 Signal Processing Fourier Signal Analysis Please bring the lab sheet from 1A experiment
Part 1B Experimental Engineering Integrated Coursework Location: Baker Building South Wing Mechanics Lab Experiment A4 Signal Processing Fourier Signal Analysis Please bring the lab sheet from 1A experiment
Analytical Chemistry II
 Analytical Chemistry II L3: Signal processing (selected slides) Semiconductor devices Apart from resistors and capacitors, electronic circuits often contain nonlinear devices: transistors and diodes. The
Analytical Chemistry II L3: Signal processing (selected slides) Semiconductor devices Apart from resistors and capacitors, electronic circuits often contain nonlinear devices: transistors and diodes. The
Microprocessors & Interfacing
 Lecture overview Microprocessors & Interfacing /Output output PMW Digital-to- (D/A) Conversion input -to-digital (A/D) Conversion Lecturer : Dr. Annie Guo S2, 2008 COMP9032 Week9 1 S2, 2008 COMP9032 Week9
Lecture overview Microprocessors & Interfacing /Output output PMW Digital-to- (D/A) Conversion input -to-digital (A/D) Conversion Lecturer : Dr. Annie Guo S2, 2008 COMP9032 Week9 1 S2, 2008 COMP9032 Week9
Wireless Sensor Networks. EP2980
 Wireless Sensor Networks EP2980 Jonas.Wahslen@sth.kth.se Sensors What to sense? How to sense/measure? Available sensors Technology Medical ECG Pulsoximeter Applications Smart Grid Industrial Automation
Wireless Sensor Networks EP2980 Jonas.Wahslen@sth.kth.se Sensors What to sense? How to sense/measure? Available sensors Technology Medical ECG Pulsoximeter Applications Smart Grid Industrial Automation
Lightweight Decentralized Algorithm for Localizing Reactive Jammers in Wireless Sensor Network
 International Journal Of Computational Engineering Research (ijceronline.com) Vol. 3 Issue. 3 Lightweight Decentralized Algorithm for Localizing Reactive Jammers in Wireless Sensor Network 1, Vinothkumar.G,
International Journal Of Computational Engineering Research (ijceronline.com) Vol. 3 Issue. 3 Lightweight Decentralized Algorithm for Localizing Reactive Jammers in Wireless Sensor Network 1, Vinothkumar.G,
ENGR 210 Lab 12: Sampling and Aliasing
 ENGR 21 Lab 12: Sampling and Aliasing In the previous lab you examined how A/D converters actually work. In this lab we will consider some of the consequences of how fast you sample and of the signal processing
ENGR 21 Lab 12: Sampling and Aliasing In the previous lab you examined how A/D converters actually work. In this lab we will consider some of the consequences of how fast you sample and of the signal processing
4. Digital Measurement of Electrical Quantities
 4.1. Concept of Digital Systems Concept A digital system is a combination of devices designed for manipulating physical quantities or information represented in digital from, i.e. they can take only discrete
4.1. Concept of Digital Systems Concept A digital system is a combination of devices designed for manipulating physical quantities or information represented in digital from, i.e. they can take only discrete
The Calculation of grms. QUALMARK: Accelerating Product Reliability WHITE PAPER
 WHITE PAPER QUALMARK: Accelerating Product Reliability WWW.QUALMARK.COM 303.254.8800 by Neill Doertenbach The metric of grms is typically used to specify and compare the energy in repetitive shock vibration
WHITE PAPER QUALMARK: Accelerating Product Reliability WWW.QUALMARK.COM 303.254.8800 by Neill Doertenbach The metric of grms is typically used to specify and compare the energy in repetitive shock vibration
Costas Loop. Modules: Sequence Generator, Digital Utilities, VCO, Quadrature Utilities (2), Phase Shifter, Tuneable LPF (2), Multiplier
, Phase Shifter, Tuneable LPF (2), Multiplier") Costas Loop Modules: Sequence Generator, Digital Utilities, VCO, Quadrature Utilities (2), Phase Shifter, Tuneable LPF (2), Multiplier 0 Pre-Laboratory Reading Phase-shift keying that employs two discrete
Costas Loop Modules: Sequence Generator, Digital Utilities, VCO, Quadrature Utilities (2), Phase Shifter, Tuneable LPF (2), Multiplier 0 Pre-Laboratory Reading Phase-shift keying that employs two discrete