Communication systems for vehicle electronics
|
|
|
- Shon West
- 6 years ago
- Views:
Transcription


1 Background Communication systems for vehicle electronics Communication systems for vehicle electronics Presentation overview automotive electronics as an application area for realtime communication Real time protocols LIN Local Interconnection Network CAN Controller Area Network TTCAN Time Triggered CAN (based on CAN) CAN FD CAN with Flexible Datarate FlexRay, based on BMW s ByteFlight TTE Time Triggered Ethernet Hybrid scheduling combining static scheduling with fixed priority scheduling analysis 1 1

2 A premium passenger car is controlled and managed by 80+ Embedded Systems Comfort Electronics: Thermal Management Chassis Control Parking Assistant Infotainment: Telematics Solutions Car PC Wireless Connectivity Cartocar communication Floating Car Data Safety: Predictive Safety Systems Driver Assistance Systems Adaptive Cruise Control Electric Power Steering Powertrain: Engine Management Transmission Control Power Management 2 Courtesy of Daimler, Bosch 2
3 Virtual differentiation between variants Variant 1 Entertainment configuration A All variants of a specific model are physically identical and differ only in their individual software configuration The various included physical components can be activated or deactivated by the software Motor configuration A Motor configuration B Entertainment configuration F Variant 2 3

 1927 4 5 7 1927 1944 1956 1966 1975 1982")
4 Example of the electrical system complexity No. of fuses No. of meters of electric wires 575 Wiring diagram, Volvo ÖV4 ( Jacob )
5 The evolution of functional requirements on the electrical system Power production and distribution Simple components More complex functions standalone systems ABS, Airbag Architecture Optimisation on many levels Standardised interfaces Integration of systems 100 Optimisation of information 50 Common data busses Features # of functions # of integrated functions

6 Automotive electronics roadmap Communication systems for vehicle electronics 6

7 Multiplex Networks Conventional system Network Identifier Data Command Control Engine Control Module Driver Information Control units Automatic Transmission Central Module 7


8 Evolution of protocols MOST TT Ethernet Byteflight FlexRay TTP/C CAN VAN J1850 CAN 2.0 LIN TTCAN CAN FD
9 Example of the electrical system Communication systems for vehicle electronics Mirror Lock Lock Window lift Power Train Instruments Seat Heating Heating Infotainment systems Central body control Climate Roof Heating Trunk Steering wheel panel Very high performance High performance Medium performance Low end performance Lock Lock Seat Mirror Mirror Heating Lock Seat Universal motor Universal panel Interior lights 9
 Objectives: Low cost, modest performance and safety requirements, flexible system architecture")
10 The LIN protocol, started in 1998 Communication systems for vehicle electronics LIN Local Interconnection network predecessor: VOLCANO Lite Cooperation between partners: Freescale, VOLVO CAR, BMW, AUDI, Volkswagen, DaimlerChrysler Mentor Graphics (former: Volcano Communication Technology) Objectives: Low cost, modest performance and safety requirements, flexible system architecture 10

11 LIN target applications Roof: (high amount of wiring) Rain Sensor, Light Sensor, Light Control, Sun Roof (Rain Sensor needs to be interrogated every 1020ms) Door/window/seat: Mirror,Central ECU, Mirror, Switch, Window Lift, Seat Control Switch, Door Lock, etc. Climate: many Small Motors Control Panel Steering Wheel: (very many controls are going to be positioned on the steering wheel) Cruise Control, Wiper, Turning Light, Optional: Climate Control, Radio, Telephone, etc. Seat: many Seat Position Motors, Occupancy Sensor, Control Panel 11
12 LIN protocol features Communication systems for vehicle electronics Bus topology Masterslave protocol, no arbitration required UART protocol, 10 bits (uses sync break facility) 8 bits of data in a block 28 blocks of data per frame Single wire Maximum 20 kbits/s 12
13 LIN bus communication Communication systems for vehicle electronics master control unit polling master task slave task slave control unit slave task slave control unit slave task interframe spacing synch Identifier field next synch field Master Task Response spacing 2 byte 1 byte data block parity time Slave Task time 13
14 CAN Controller Area Network Bus topology CSMA/CR (Carrier sense, Multiple Access/ Collision Resolution) Error detection capabilities Supports atomic broadcast 064 bytes of data per frame Twisted pair Maximum 1 Mbit/s ARB CTRL DATA CRC ACK EOF Arbitration (identifier) Control information 08 bytes Checksum Acknowledge End of frame MESSAGE FRAME SOF ARB CTRL DATA CRC ACK EOF 14
15 Bus collission detection Idle bus (recessive level) Bus transceivers Open collector Bus level: Recessive (bit) 1 Dominant (bit) 0 Bus level +5V R 1 1 NodeA Node B 15
16 Bus arbitration Two nodes transmitting same level (1) transmit 1 transmit 1 receive 1 Bus level +5V I R = 0 receive I A = 0 Node A 1 1 Node B 1 I B = 0 16
17 Collission Resolution transmit 1 transmit 0 receive 0 Bus level: 0V +5V R I R =I A receive 0 Node A Node B I A I B =0 Node B aborts transmission since the received bit differs from the transmitted bit 17
18 Three messages collide... Arbitration field (identifier with priority) Nodes own specific message identifiers. EXAMPLE: Three nodes start simultaneously Node A transmits: $257 ( ) Node B transmits: $360 ( ) Node C transmits: $25F ( ) Bit number SOF Bus level D D D R D D R D R D R R R R Node A Node B Aborts Node C Aborts 18

 Solution: New CAN FD specification CAN")
19 Standard/Extended CAN drawback... Protocol bus arbitration, acknowledge and error handling slow down bitrate ( maximum 1 Mbits/s) Solution: New CAN FD specification CAN Flexible Datarate 19




20 Bywire control Electronic information carrier Hydraulic information carrier The F8 Digital FlyByWire (DFBW) flight research project validated the principal concepts of allelectric flight control systems now used on nearly all modern highperformance aircraft and on military and civilian transports. The first flight of the 13year project was on May 25, Courtesy of Dryden Flight Research Center 20

21 Control system implementation strategies Local control Local information processing Independent control objects Centralized global control Local and central information processing Interconnected control objects Distributed global control Local and distributed information processing Interconnected control objects 21
22 Nonfunctional requirements Interoperability Safety System life time Changeability Testability Maintainability Extendability Portability Restructuring Performance/ Efficiency Security Costeffectiveness Produceability Timeliness System Architecture Conceptual integrity Usability Availability Reliability Understandability Robustness Fault tolerance Variability (variants, configurations) 22
23 Tradeoffs from Safety/Reliability requirements The extremes from reliability requirements leads to safety requirements. Safety requirements implies redundancy, (FailOperational, FailSafe, etc). Safety requirements also demands predictability, we has to show, a priori, that the system will fulfill it s mission in every surrounding at every time. In a distributed environment, only time triggered protocols with redundant buses can provide this safety. Contemporary TTP s are: TTCAN, based on Controller Area Network (CAN) which is widely used in today's vehicular electronic systems. FlexRay, based on BMW s ByteFlight. Operational in contemporary automotive electronic systems. TimeTriggered Ethernet. TTEthernet expands classical Ethernet with services to meet timecritical, deterministic or safetyrelevant conditions. 23

 Reserved for future expansion.")
24 Time Triggered CAN Based on the CAN protocol Bus topology Media: twisted pair 1Mbit/s Basic cycle 0 Basic cycle 1 Basic cycle 2 Basic cycle 3 Transmission Columns t Exclusive guaranteed service Arbitration guaranteed service (high ID), best effort (low ID) Reserved for future expansion... Time is global and measured in network time units (NTU s) 24

 guaranteed service (high ID), best effort (low")
25 Flexray Double channels, bus or star (even mixed). Media: twisted pair, fibre 10 Mbit/s for each channel Redundant channel can be used for an alternative schedule Static segment (TTCAN Exclusive ) guaranteed service Dynamic segment (TTCAN Arbitration ) guaranteed service (high ID), best effort (low ID) Max 64 nodes on a Flexray network. 25

26 Time Triggered Ethernet Classic Ethernet bus topology 1 Gbit for each channel Communication systems for vehicle electronics Every base period Every second base period Compare with TTCAN basic cycles Every fourth base 26 period 26
27 Comparisons All protocols targets real time applications. Provides for time AND event triggered paradigms. All protocols are suitable for scheduling tools. Commercial production tools are available. CAN, many years experiences, a lot of existing applications. Implies migration of existing CAN applications into TTCAN and CAN FD. Flexray is the automotive industries initiative. New hardware, promoted in for example AUTOSAR. TTEthernet. Proven technology with lots of existing hardware, 27


28 What to choose? 28 28
29 Combining time triggering with events: Example of Hybrid scheduling for TTCAN Messages are sorted into three different categories: Hard realtime, for minimal jitter with guaranteed response time. Firm realtime, for guaranteed response time, but can tolerate jitter. Soft realtime, for best effort messages. 29

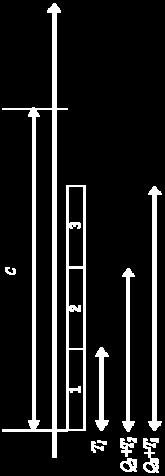

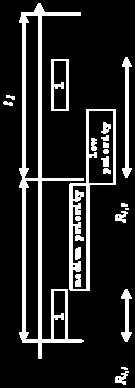


30 TTCAN detailed study Communication systems for vehicle electronics Response time analysis Q T B R i B i T i Q i 30
31 Time triggered messages M h Basic cycle 0 Transmission Columns time windows Basic cycle 1 Basic cycle 2 Basic cycle 3 After structuring: M : {M h, M f, M s }, assume that at least M h is defined. We now construct a matrix cycle. Due to protocol constraints, the schedule has to fulfil: LCM( M h p ) = x 2 n where: LCM is least common multiple period for the M h message set; x is the preferred length of a basic cycle within LCM; n is the number of basic cycles. Hardware constraints: Hwc1: 1 x 2 y, has to be consistent with a hardware register, y bits Hwc2: 0 n k, always a power of 2, constraint in hardware. Hwc3: # of triggers Tr, columns in the matrix cycle. Limited by the number of available trigger registers. 31
32 Multiple solutions satisfies the equation... Choose a strategy: Strategy 1: Minimize number of basic cycles, requires a longer basic cycle, and more triggers. Strategy 2: Minimize length of basic cycles, increase probability of finding a feasible schedule for large message 32
33 Persuing the strategies... Communication systems for vehicle electronics Construct a schedule for the following set: M h = ( M1, M2, M3) with the following attributes (NTU): M1 p = 1000, M1 e = 168 M2 p = 2000, M2 e = 184 M3 p = 3000, M3 e = 216 It s obvious that: LCM( M1, M2, M3 ) = and: 6000 = x 2 n 33
34 Strategy 1 Minimizing number of basic cycles yields: 2 n = 1, so n = 0 and x = Hwc1 and Hwc2 are fulfilled. Total numbers of triggers for N messages in one basic cycle is: in this case: # of triggers = So, strategy 1, leads to a solution with: 1 basic cycle and 11 triggers. MAtrix cycle length is 6000 NTU. Basic Cycle Triggers N i LCM( M i M ) M 1 M 2 M 3 M 1 M 1 M 2 M 1 M 3 M 1 M 2 M
35 Strategy 2 n = 0: 6000 = x 2 0 x = 6000 (same as strategy 1) n = 1: 6000 = x 2 1 x = 3000 n = 2: 6000 = x 2 2 x = 1500 n = 3: 6000 = x 2 3 x = 750 n = 4: 6000 = x 2 4 x = 375 n = 5: 6000 = x 2 5 x = Basic cycle 1 (at 0) 2 (at 375) 3 (at 750) 4 (at 1125) 5 (at 1500) 6 (at 1875) 7 (at 2250) 8 (at 2625) 9 (at 3000) 10 (at 3375) 11 (at 3750) 12 (at 4125) 13 (at 4500) 14 (at 4875) 15 (at 5250) 16 (at 5625) M 1 M 2 M M M 1 M M 1 M M 1? 1 12?M 1 M M Trigger Information 35 Minimum Triggers 35
36 Strategy 2 Avoid this conflict with the requirement that: a basic cycle shall be at least as long as the shortest period in the message set. Applying this restriction we get: n = 2, (x = 1500) which yields a feasible schedule: Basic cycle M 1 M 2 M 3 M M 1 M M 1 M 3 M 1 M M 1 1 Trigger Information Minimum Triggers 36
37 Verifying the events... (M f ) Communication systems for vehicle electronics Basic Grey slots are supposed to be allocated for M h Cycle NTUslots (Columns) 1 q 0 2 q 1 q 2 3 q 3 q 4 q n q N3 q N2 q N1 for each message m in M f : for message m = 1 up to last_m for virtual message VM i = 1 up to last_vm if( Q m + T m ) falls within ( VM i,start, VM i,completion ) Q m = VM i,completion else Q m endif end end end 1 j: P P m j Q t m j T j 37

38 38 Thank you for your attention. 38
Comfort Electronics: Thermal Management Chassis Control Parking Assistant
 Presentation overview Background automotive electronics as an application area for realtime communication Real time protocols LIN Local Interconnection Network A premium passenger car is controlled and
Presentation overview Background automotive electronics as an application area for realtime communication Real time protocols LIN Local Interconnection Network A premium passenger car is controlled and
A premium passenger car is controlled and managed by 80+ Embedded Systems. Communication systems for vehicle electronics
 Presentation overview Background automotive electronics, an application area for time triggered communication. Time triggered protocols A premium passenger car is controlled and managed by 80+ Embedded
Presentation overview Background automotive electronics, an application area for time triggered communication. Time triggered protocols A premium passenger car is controlled and managed by 80+ Embedded
Time Triggered Protocol (TTP/C): A Safety-Critical System Protocol
: A Safety-Critical System Protocol") Time Triggered Protocol (TTP/C): A Safety-Critical System Protocol Literature Review EE382c Fall 1999 Howard Curtis Global Technology Services MCC Robert France Global Software Division Motorola, Inc.
Time Triggered Protocol (TTP/C): A Safety-Critical System Protocol Literature Review EE382c Fall 1999 Howard Curtis Global Technology Services MCC Robert France Global Software Division Motorola, Inc.
The Use of CAN Bus Message Electrical Signatures for Automotive Reverse Engineering
 The Use of CAN Bus Message Electrical Signatures for Automotive Reverse Engineering C Quigley, D Charles, R McLaughlin Warwick Control Technologies Abstract There are many applications in which you may
The Use of CAN Bus Message Electrical Signatures for Automotive Reverse Engineering C Quigley, D Charles, R McLaughlin Warwick Control Technologies Abstract There are many applications in which you may
CAN for time-triggered systems
 CAN for time-triggered systems Lars-Berno Fredriksson, Kvaser AB Communication protocols have traditionally been classified as time-triggered or eventtriggered. A lot of efforts have been made to develop
CAN for time-triggered systems Lars-Berno Fredriksson, Kvaser AB Communication protocols have traditionally been classified as time-triggered or eventtriggered. A lot of efforts have been made to develop
Automotive Engineering Section, UniKLMFI - Autotronic 2 (multiplexing) Why do we use multiplexing on cars?
 Why do we use multiplexing on cars?") Automotive Engineering Section, UniKLMFI - Autotronic 2 (multiplexing) Why do we use multiplexing on cars? EVOLUTION DU CABLAGE METRES (longueur de cablage) NOMBRE D INTERCONNEXIONS 2000 1800 1600 1400
Automotive Engineering Section, UniKLMFI - Autotronic 2 (multiplexing) Why do we use multiplexing on cars? EVOLUTION DU CABLAGE METRES (longueur de cablage) NOMBRE D INTERCONNEXIONS 2000 1800 1600 1400
DEMONSTRATIONAL SYSTEM FOR TRAINING IN FlexRay COMMUNICATION
 XIX IMEKO World Congress Fundamental and Applied Metrology September 611, 29, Lisbon, Portugal DEMONSTRATIONAL SYSTEM FOR TRAINING IN COMMUNICATION Jan Malinsky 1, Petr Kocourek 2 1 Czech Technical University
XIX IMEKO World Congress Fundamental and Applied Metrology September 611, 29, Lisbon, Portugal DEMONSTRATIONAL SYSTEM FOR TRAINING IN COMMUNICATION Jan Malinsky 1, Petr Kocourek 2 1 Czech Technical University
SCI ISO-K CCD PCI CAN
 DCX Networks SCI (Serial Communication Interface): The system uses two wires; one to transmit and one to receive. ISO-K is the adaptation of the 9141 standards allowing two-way communication on a single
DCX Networks SCI (Serial Communication Interface): The system uses two wires; one to transmit and one to receive. ISO-K is the adaptation of the 9141 standards allowing two-way communication on a single
Dependable Communication Synthesis for Distributed Embedded Systems *
 Dependable Communication Synthesis for Distributed Embedded Systems * Nagarajan Kandasamy 1, John P. Hayes 2, and Brian T. Murray 3 1 Institute for Software Integrated Systems, Vanderbilt University, Nashville,
Dependable Communication Synthesis for Distributed Embedded Systems * Nagarajan Kandasamy 1, John P. Hayes 2, and Brian T. Murray 3 1 Institute for Software Integrated Systems, Vanderbilt University, Nashville,
PSI5: Safety & latest developments
 Vector Congress 2016 PSI5: Safety & latest developments Juan Pontes, Robert Bosch GmbH 29.11.2016 Vehicle as networking platform Networking between different systems in the vehicle Networking between different
Vector Congress 2016 PSI5: Safety & latest developments Juan Pontes, Robert Bosch GmbH 29.11.2016 Vehicle as networking platform Networking between different systems in the vehicle Networking between different
Design of Vehicle Lamp Control System based on LIN bus Wen Jian-yue1, a, Luo Feng1, b
 4th National Conference on Electrical, Electronics and Computer Engineering (NCEECE 2015) Design of Vehicle Lamp Control System based on LIN bus Wen Jian-yue1, a, Luo Feng1, b 1 Clean Energy Automotive
4th National Conference on Electrical, Electronics and Computer Engineering (NCEECE 2015) Design of Vehicle Lamp Control System based on LIN bus Wen Jian-yue1, a, Luo Feng1, b 1 Clean Energy Automotive
Modular Scheduling of Distributed Heterogeneous Time-Triggered Automotive Systems
 Modular Scheduling of Distributed Heterogeneous Time-Triggered Automotive Systems Martin Lukasiewycz TUM CREATE Singapore martin.lukasiewycz@tum-create.edu.sg ABSTRACT This paper proposes a modular framework
Modular Scheduling of Distributed Heterogeneous Time-Triggered Automotive Systems Martin Lukasiewycz TUM CREATE Singapore martin.lukasiewycz@tum-create.edu.sg ABSTRACT This paper proposes a modular framework
IN-VEHICLE electronic systems have been replacing their
 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 56, NO. 6, NOVEMBER 2007 3431 Systematic Message Schedule Construction for Time-Triggered CAN Klaus Schmidt and Ece G. Schmidt Abstract The most widely used
IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 56, NO. 6, NOVEMBER 2007 3431 Systematic Message Schedule Construction for Time-Triggered CAN Klaus Schmidt and Ece G. Schmidt Abstract The most widely used
REAL-TIME OPTIMISATION OF TTCAN NETWORKS
 REAL-TIME OPTIMISATION OF TTCAN NETWORKS A DISSERTATION SUBMITTED TO THE DEPARTEMENT OF ENGINEERING TECHNOLOGY OF WATERFORD INSTITUTE OF TECHNOLOGY IN COMPLETE FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE
REAL-TIME OPTIMISATION OF TTCAN NETWORKS A DISSERTATION SUBMITTED TO THE DEPARTEMENT OF ENGINEERING TECHNOLOGY OF WATERFORD INSTITUTE OF TECHNOLOGY IN COMPLETE FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE
IBM Platform Technology Symposium
 IBM Platform Technology Symposium Rochester, Minnesota USA September 14-15, 2004 Remote control by CAN bus (Controller Area Network) including active load sharing for scalable power supply systems Authors:
IBM Platform Technology Symposium Rochester, Minnesota USA September 14-15, 2004 Remote control by CAN bus (Controller Area Network) including active load sharing for scalable power supply systems Authors:
Inter- and Intra-Vehicle Communications
 Inter- and Intra-Vehicle Communications Gilbert Held A Auerbach Publications Taylor 5* Francis Group Boca Raton New York Auerbach Publications is an imprint of the Taylor & Francis Croup, an informa business
Inter- and Intra-Vehicle Communications Gilbert Held A Auerbach Publications Taylor 5* Francis Group Boca Raton New York Auerbach Publications is an imprint of the Taylor & Francis Croup, an informa business
DSI Bus Standard. Version March 29, 2005
 SI Bus Standard Version. March 9, 5 **Implementation of the Bus Standard is governed by the terms of the Bus Standard ovenant, any changes to the specification must be agreed to by both TRW and Freescale
SI Bus Standard Version. March 9, 5 **Implementation of the Bus Standard is governed by the terms of the Bus Standard ovenant, any changes to the specification must be agreed to by both TRW and Freescale
Low Speed Serial Data Fundamentals
 Low Speed Serial Data Fundamentals Table of Contents Introduction................................. 3 Parallel vs. Serial............................. 4 I 2 C.................................... 6-9 Background.................................
Low Speed Serial Data Fundamentals Table of Contents Introduction................................. 3 Parallel vs. Serial............................. 4 I 2 C.................................... 6-9 Background.................................
William Milam Ford Motor Co
 Sharing technology for a stronger America Verification Challenges in Automotive Embedded Systems William Milam Ford Motor Co Chair USCAR CPS Task Force 10/20/2011 What is USCAR? The United States Council
Sharing technology for a stronger America Verification Challenges in Automotive Embedded Systems William Milam Ford Motor Co Chair USCAR CPS Task Force 10/20/2011 What is USCAR? The United States Council
Automatic car AC control using CAN protocol
 Automatic car AC control using CAN protocol Chaithra Chandrashekar 1, Dr.B.Ramesh 2, R.Vijay 3 1,2,3 Malnad College of Engineering, Hassan-573202, Karnataka, India Chaithravijay27@gmail.com 1, sanchara@gmail.com
Automatic car AC control using CAN protocol Chaithra Chandrashekar 1, Dr.B.Ramesh 2, R.Vijay 3 1,2,3 Malnad College of Engineering, Hassan-573202, Karnataka, India Chaithravijay27@gmail.com 1, sanchara@gmail.com
COPYRIGHT AND CITATION CONSIDERATIONS FOR THIS THESIS/ DISSERTATION
 COPYRIGHT AND CITATION CONSIDERATIONS FOR THIS THESIS/ DISSERTATION o Attribution You must give appropriate credit, provide a link to the license, and indicate if changes were made. You may do so in any
COPYRIGHT AND CITATION CONSIDERATIONS FOR THIS THESIS/ DISSERTATION o Attribution You must give appropriate credit, provide a link to the license, and indicate if changes were made. You may do so in any
Serial Bus Analysis Application Note
 Mixed Signal Oscilloscopes DLM2000 Series 1. Introduction Embedded systems are being built into information and industrial devices used in various sectors, with focus on digital household appliances, such
Mixed Signal Oscilloscopes DLM2000 Series 1. Introduction Embedded systems are being built into information and industrial devices used in various sectors, with focus on digital household appliances, such
Communication. Messages. I/O Port Frames Physical Link
 Embedded Microcomputer Systems Lecture 23.1 Had any errors with the XON/XOFF? No undetected errors so far! UserA UserB OS1 Computer1 Communication Messages UserC I/O Port Frames Physical Link Figure 14.1.
Embedded Microcomputer Systems Lecture 23.1 Had any errors with the XON/XOFF? No undetected errors so far! UserA UserB OS1 Computer1 Communication Messages UserC I/O Port Frames Physical Link Figure 14.1.
A PID Controller for Real-Time DC Motor Speed Control using the C505C Microcontroller
 A PID Controller for Real-Time DC Motor Speed Control using the C505C Microcontroller Sukumar Kamalasadan Division of Engineering and Computer Technology University of West Florida, Pensacola, FL, 32513
A PID Controller for Real-Time DC Motor Speed Control using the C505C Microcontroller Sukumar Kamalasadan Division of Engineering and Computer Technology University of West Florida, Pensacola, FL, 32513
Scheduling and Communication Synthesis for Distributed Real-Time Systems
 Scheduling and Communication Synthesis for Distributed Real-Time Systems Department of Computer and Information Science Linköpings universitet 1 of 30 Outline Motivation System Model and Architecture Scheduling
Scheduling and Communication Synthesis for Distributed Real-Time Systems Department of Computer and Information Science Linköpings universitet 1 of 30 Outline Motivation System Model and Architecture Scheduling
Findings of the Artist2 Workshop Beyond Autosar
 Findings of the Artist2 Workshop Beyond Autosar Werner Damm OFFIS Acknowledgements This presentation reports on Results of the NoE Artist2, Workshop Beyond Autosar (co-organized with Albert Benveniste,
Findings of the Artist2 Workshop Beyond Autosar Werner Damm OFFIS Acknowledgements This presentation reports on Results of the NoE Artist2, Workshop Beyond Autosar (co-organized with Albert Benveniste,
ROM/UDF CPU I/O I/O I/O RAM
 DATA BUSSES INTRODUCTION The avionics systems on aircraft frequently contain general purpose computer components which perform certain processing functions, then relay this information to other systems.
DATA BUSSES INTRODUCTION The avionics systems on aircraft frequently contain general purpose computer components which perform certain processing functions, then relay this information to other systems.
Politecnico di Milano Advanced Network Technologies Laboratory. Radio Frequency Identification
 Politecnico di Milano Advanced Network Technologies Laboratory Radio Frequency Identification RFID in Nutshell o To Enhance the concept of bar-codes for faster identification of assets (goods, people,
Politecnico di Milano Advanced Network Technologies Laboratory Radio Frequency Identification RFID in Nutshell o To Enhance the concept of bar-codes for faster identification of assets (goods, people,
Peripheral Sensor Interface for Automotive Applications
 Peripheral Sensor Interface for Automotive Applications Substandard Powertrain I Contents 1 Introduction 1 2 Definition of Terms 2 3 Data Link Layer 3 Sensor to ECU Communication... 3 3.1.1 Data Frame...
Peripheral Sensor Interface for Automotive Applications Substandard Powertrain I Contents 1 Introduction 1 2 Definition of Terms 2 3 Data Link Layer 3 Sensor to ECU Communication... 3 3.1.1 Data Frame...
Onboard supply control unit -J519- Fitting location: 1 - Onboard supply control unit -J519-
 Sivu 1/5 Onboard supply control unit -J519- Fitting location: 1 - Onboard supply control unit -J519- Connector assignment: A - 73-pin connector -T73a- B - 73-pin connector -T73b- Sivu 2/5 Description of
Sivu 1/5 Onboard supply control unit -J519- Fitting location: 1 - Onboard supply control unit -J519- Connector assignment: A - 73-pin connector -T73a- B - 73-pin connector -T73b- Sivu 2/5 Description of
Automotive Control Solution for Brushless DC Motors
 Page 1 Automotive Control Solution for Brushless DC Motors TTTech provides solutions for setting up distributed systems with brushless DC motors. Today brushless DC motors are used in a variety of applications.
Page 1 Automotive Control Solution for Brushless DC Motors TTTech provides solutions for setting up distributed systems with brushless DC motors. Today brushless DC motors are used in a variety of applications.
Peripheral Sensor Interface for Automotive Applications
 for Automotive Applications Technical 01/2018 I Contents 1 Introduction 1 2 Definition of Terms 2 3 Data Link Layer 3 3.1 Sensor to ECU Communication... 3 3.2 ECU to Sensor Communication... 4 4 Physical
for Automotive Applications Technical 01/2018 I Contents 1 Introduction 1 2 Definition of Terms 2 3 Data Link Layer 3 3.1 Sensor to ECU Communication... 3 3.2 ECU to Sensor Communication... 4 4 Physical
Timing Analysis of the FlexRay Communication Protocol
 Downloaded from orbit.dtu.dk on: May 09, 2018 Timing Analysis of the FlexRay Communication Protocol Pop, Traian; Pop, Paul; Eles, Petru; Peng, Zebo Published in: Euromicro Conference on Real-Time Systems
Downloaded from orbit.dtu.dk on: May 09, 2018 Timing Analysis of the FlexRay Communication Protocol Pop, Traian; Pop, Paul; Eles, Petru; Peng, Zebo Published in: Euromicro Conference on Real-Time Systems
Significant Reduction of Validation Efforts for Dynamic Light Functions with FMI for Multi-Domain Integration and Test Platforms
 Significant Reduction of Validation Efforts for Dynamic Light Functions with FMI for Multi-Domain Integration and Test Platforms Dr. Stefan-Alexander Schneider Johannes Frimberger BMW AG, 80788 Munich,
Significant Reduction of Validation Efforts for Dynamic Light Functions with FMI for Multi-Domain Integration and Test Platforms Dr. Stefan-Alexander Schneider Johannes Frimberger BMW AG, 80788 Munich,
ECU with emulated partial networking functionality
 ECU with emulated partial networking functionality An alternative approach to ISO 11898-6 CAN transceivers Martin Kresta, Roman Buzas, and Ondrej Kupcik, ON Semiconductor The paper presents a study of
ECU with emulated partial networking functionality An alternative approach to ISO 11898-6 CAN transceivers Martin Kresta, Roman Buzas, and Ondrej Kupcik, ON Semiconductor The paper presents a study of
STUDY OF POWER LINE COMMUNICATION MODEMS FOR AUTOMOTIVE COMMUNICATION NETWORKS
 STUDY OF POWER LINE COMMUNICATION MODEMS FOR AUTOMOTIVE COMMUNICATION NETWORKS by Peter Nisbet Bachelor of Technology in Electronics Engineering Technology RCC Institute of Technology, Concord, Ontario,
STUDY OF POWER LINE COMMUNICATION MODEMS FOR AUTOMOTIVE COMMUNICATION NETWORKS by Peter Nisbet Bachelor of Technology in Electronics Engineering Technology RCC Institute of Technology, Concord, Ontario,
Arda Gumusalan CS788Term Project 2
 Arda Gumusalan CS788Term Project 2 1 2 Logical topology formation. Effective utilization of communication channels. Effective utilization of energy. 3 4 Exploits the tradeoff between CPU speed and time.
Arda Gumusalan CS788Term Project 2 1 2 Logical topology formation. Effective utilization of communication channels. Effective utilization of energy. 3 4 Exploits the tradeoff between CPU speed and time.
Multiple Access Methods
 Helsinki University of Technology S-72.333 Postgraduate Seminar on Radio Communications Multiple Access Methods Er Liu liuer@cc.hut.fi Communications Laboratory 16.11.2004 Content of presentation Protocol
Helsinki University of Technology S-72.333 Postgraduate Seminar on Radio Communications Multiple Access Methods Er Liu liuer@cc.hut.fi Communications Laboratory 16.11.2004 Content of presentation Protocol
Exact Response Time of FlexRay Communication Protocol
 Exact Response Time of FlexRay Communication Protocol Lucien Ouedraogo and Ratnesh Kumar Dept. of Elect. & Comp. Eng., Iowa State University, Ames, IA, 501, USA Emails: (olucien, rkumar)@iastate.edu Abstract
Exact Response Time of FlexRay Communication Protocol Lucien Ouedraogo and Ratnesh Kumar Dept. of Elect. & Comp. Eng., Iowa State University, Ames, IA, 501, USA Emails: (olucien, rkumar)@iastate.edu Abstract
AES - Automotive Embedded Systems
 Coordinating unit: Teaching unit: Academic year: Degree: ECTS credits: 2017 230 - ETSETB - Barcelona School of Telecommunications Engineering 744 - ENTEL - Department of Network Engineering MASTER'S DEGREE
Coordinating unit: Teaching unit: Academic year: Degree: ECTS credits: 2017 230 - ETSETB - Barcelona School of Telecommunications Engineering 744 - ENTEL - Department of Network Engineering MASTER'S DEGREE
Peripheral Sensor Interface for Automotive Applications
 I for Automotive Applications Substandard Chassis and Safety 121005_psi5_spec_v2d1_Chassis_and_Safety.doc 04.10.2012 II Contents 1 Introduction 1 2 Recommended Operation Modes 2 3 Sensor to ECU communication
I for Automotive Applications Substandard Chassis and Safety 121005_psi5_spec_v2d1_Chassis_and_Safety.doc 04.10.2012 II Contents 1 Introduction 1 2 Recommended Operation Modes 2 3 Sensor to ECU communication
Standardised Ground Data Systems Implementation: A Dream?
 GSAW 2007 Standardised Ground Data Systems Y. Doat, C. R. Haddow, M. Pecchioli and N. Peccia ESA/ESOC, Robert Bosch Straße 5, 64293 Darmstadt, Germany Ground Data Systems at ESA/ESOC: The current approach
GSAW 2007 Standardised Ground Data Systems Y. Doat, C. R. Haddow, M. Pecchioli and N. Peccia ESA/ESOC, Robert Bosch Straße 5, 64293 Darmstadt, Germany Ground Data Systems at ESA/ESOC: The current approach
Smart Actuators for Mini Unmanned Aerial Vehicles
 Smart Actuators for Mini Unmanned Aerial Vehicles Ádám Bakos Gergely Regula István Gőzse Bálint Vanek József Bokor Systems and Control Laboratory, Computer and Automation Research Institute, Hungarian
Smart Actuators for Mini Unmanned Aerial Vehicles Ádám Bakos Gergely Regula István Gőzse Bálint Vanek József Bokor Systems and Control Laboratory, Computer and Automation Research Institute, Hungarian
Industrial Interface Standards Overview:
 Industrial Interface Standards Overview: RS-485, RS-422, PROFIBUS, RS-232, CAN, LIN, IO-Link, I2C October 2018 ASC/INT/TRX 1 Agenda The following standards will be covered RS-485, RS-422, ProfiBus RS-232
Industrial Interface Standards Overview: RS-485, RS-422, PROFIBUS, RS-232, CAN, LIN, IO-Link, I2C October 2018 ASC/INT/TRX 1 Agenda The following standards will be covered RS-485, RS-422, ProfiBus RS-232
Distributed Systems Interface
 Distributed Systems Interface http://www.dsiconsortium.org/ June 22, 2010 1 Agenda 1. What is the DSI Consortium? 2. What are the consortium goals for the 3 rd generation DSI standard (DSI3)? 3. What are
Distributed Systems Interface http://www.dsiconsortium.org/ June 22, 2010 1 Agenda 1. What is the DSI Consortium? 2. What are the consortium goals for the 3 rd generation DSI standard (DSI3)? 3. What are
Architectures of. Automotive Electrical. Teaching slidess. Complexity Mastered
 Architectures of Automotive Electrical and Electron nics (E/E) Systems Nicolas Navet Teaching slidess Can be freely used for teaching Complexity Mastered Out line 1. Architecture of Automo otive Embedded
Architectures of Automotive Electrical and Electron nics (E/E) Systems Nicolas Navet Teaching slidess Can be freely used for teaching Complexity Mastered Out line 1. Architecture of Automo otive Embedded
Online Monitoring for Automotive Sub-systems Using
 Online Monitoring for Automotive Sub-systems Using 1149.4 C. Jeffrey, A. Lechner & A. Richardson Centre for Microsystems Engineering, Lancaster University, Lancaster, LA1 4YR, UK 1 Abstract This paper
Online Monitoring for Automotive Sub-systems Using 1149.4 C. Jeffrey, A. Lechner & A. Richardson Centre for Microsystems Engineering, Lancaster University, Lancaster, LA1 4YR, UK 1 Abstract This paper
CANopen Programmer s Manual Part Number Version 1.0 October All rights reserved
 Part Number 95-00271-000 Version 1.0 October 2002 2002 All rights reserved Table Of Contents TABLE OF CONTENTS About This Manual... iii Overview and Scope... iii Related Documentation... iii Document Validity
Part Number 95-00271-000 Version 1.0 October 2002 2002 All rights reserved Table Of Contents TABLE OF CONTENTS About This Manual... iii Overview and Scope... iii Related Documentation... iii Document Validity
Grundlagen der Rechnernetze. Introduction
 Grundlagen der Rechnernetze Introduction Overview Building blocks and terms Basics of communication Addressing Protocols and Layers Performance Historical development Grundlagen der Rechnernetze Introduction
Grundlagen der Rechnernetze Introduction Overview Building blocks and terms Basics of communication Addressing Protocols and Layers Performance Historical development Grundlagen der Rechnernetze Introduction
Design and analysis of electric vehicle battery management system based on flexray bus
 International Conference on Advanced Electronic Science and Technology (AEST 2016) Design and analysis of electric vehicle battery management system based on flexray bus 1, 2, a Jiangyi Lv 1 1 1, Guanli
International Conference on Advanced Electronic Science and Technology (AEST 2016) Design and analysis of electric vehicle battery management system based on flexray bus 1, 2, a Jiangyi Lv 1 1 1, Guanli
Communication bus systems
 Communication bus systems Communication bus systems Course code: CS03 Student training manual Suzuki Online Training Foreword Networks for data communication, also known as bus systems or protocols, are
Communication bus systems Communication bus systems Course code: CS03 Student training manual Suzuki Online Training Foreword Networks for data communication, also known as bus systems or protocols, are
Convergence of Bandwidth, Robustness and Energy Saving Challenges on CAN Physical Layer
 Convergence of Bandwidth, Robustness and Energy Saving Challenges on CAN Physical Layer David Lopez and Philippe Mounier Freescale Semiconductor Abstract Industry is facing antagonist trends, one requiring
Convergence of Bandwidth, Robustness and Energy Saving Challenges on CAN Physical Layer David Lopez and Philippe Mounier Freescale Semiconductor Abstract Industry is facing antagonist trends, one requiring
Adaptation of MAC Layer for QoS in WSN
 Adaptation of MAC Layer for QoS in WSN Sukumar Nandi and Aditya Yadav IIT Guwahati Abstract. In this paper, we propose QoS aware MAC protocol for Wireless Sensor Networks. In WSNs, there can be two types
Adaptation of MAC Layer for QoS in WSN Sukumar Nandi and Aditya Yadav IIT Guwahati Abstract. In this paper, we propose QoS aware MAC protocol for Wireless Sensor Networks. In WSNs, there can be two types
BASIC CONCEPTS OF HSPA
 284 23-3087 Uen Rev A BASIC CONCEPTS OF HSPA February 2007 White Paper HSPA is a vital part of WCDMA evolution and provides improved end-user experience as well as cost-efficient mobile/wireless broadband.
284 23-3087 Uen Rev A BASIC CONCEPTS OF HSPA February 2007 White Paper HSPA is a vital part of WCDMA evolution and provides improved end-user experience as well as cost-efficient mobile/wireless broadband.
Modbus communication module for TCX2: AEX-MOD
 Modbus communication module for TCX2: Communication Specification TCX2 is factory installed in TCX2 series controllers with -MOD suffix, and is also available separately upon request for customer installation
Modbus communication module for TCX2: Communication Specification TCX2 is factory installed in TCX2 series controllers with -MOD suffix, and is also available separately upon request for customer installation
A SERVICE-ORIENTED SYSTEM ARCHITECTURE FOR THE HUMAN CENTERED DESIGN OF INTELLIGENT TRANSPORTATION SYSTEMS
 Tools and methodologies for ITS design and drivers awareness A SERVICE-ORIENTED SYSTEM ARCHITECTURE FOR THE HUMAN CENTERED DESIGN OF INTELLIGENT TRANSPORTATION SYSTEMS Jan Gačnik, Oliver Häger, Marco Hannibal
Tools and methodologies for ITS design and drivers awareness A SERVICE-ORIENTED SYSTEM ARCHITECTURE FOR THE HUMAN CENTERED DESIGN OF INTELLIGENT TRANSPORTATION SYSTEMS Jan Gačnik, Oliver Häger, Marco Hannibal
Increasing Broadcast Reliability for Vehicular Ad Hoc Networks. Nathan Balon and Jinhua Guo University of Michigan - Dearborn
 Increasing Broadcast Reliability for Vehicular Ad Hoc Networks Nathan Balon and Jinhua Guo University of Michigan - Dearborn I n t r o d u c t i o n General Information on VANETs Background on 802.11 Background
Increasing Broadcast Reliability for Vehicular Ad Hoc Networks Nathan Balon and Jinhua Guo University of Michigan - Dearborn I n t r o d u c t i o n General Information on VANETs Background on 802.11 Background
Systems. Roland Kammerer. 29. October Institute of Computer Engineering Vienna University of Technology. Communication in Distributed Embedded
 Communication Roland Institute of Computer Engineering Vienna University of Technology 29. October 2010 Overview 1. Distributed Motivation 2. OSI Communication Model 3. Topologies 4. Physical Layer 5.
Communication Roland Institute of Computer Engineering Vienna University of Technology 29. October 2010 Overview 1. Distributed Motivation 2. OSI Communication Model 3. Topologies 4. Physical Layer 5.
CAN FD and the CRC issue
 CAN FD CAN FD and the CRC issue During ISO standardization the original CAN FD protocol needed to be modified, in order to maintain the high level of reliability of Classical CAN. This article illustrates
CAN FD CAN FD and the CRC issue During ISO standardization the original CAN FD protocol needed to be modified, in order to maintain the high level of reliability of Classical CAN. This article illustrates
Message Scheduling Optimization for FlexRay Protocol
 Message Scheduling Optimization for FlexRay Protocol Huabin Ruan a, Renfa Li a, Yong Xie a a Embedded System & Networking Laboratory, Hunan University, hina ruanhuabin@163.com, lirenfa@vip.sina.com, andyxieyong@163.com
Message Scheduling Optimization for FlexRay Protocol Huabin Ruan a, Renfa Li a, Yong Xie a a Embedded System & Networking Laboratory, Hunan University, hina ruanhuabin@163.com, lirenfa@vip.sina.com, andyxieyong@163.com
Optimized Schedule Synthesis under Real-Time Constraints for the Dynamic Segment of FlexRay
 2010 IEEE/IFIP International Conference on Embedded and Ubiquitous Computing Optimized Schedule Synthesis under Real-Time Constraints for the Dynamic Segment of FlexRay Reinhard Schneider, Unmesh Bordoloi,
2010 IEEE/IFIP International Conference on Embedded and Ubiquitous Computing Optimized Schedule Synthesis under Real-Time Constraints for the Dynamic Segment of FlexRay Reinhard Schneider, Unmesh Bordoloi,
Multi-channel telemetry solutions
 Multi-channel telemetry solutions CAEMAX and imc covering the complete scope imc Partner Newsletter / September 2015 Fig. 1: Schematic of a Dx telemetry system with 4 synchronized transmitter modules Introduction
Multi-channel telemetry solutions CAEMAX and imc covering the complete scope imc Partner Newsletter / September 2015 Fig. 1: Schematic of a Dx telemetry system with 4 synchronized transmitter modules Introduction
The design of safe automotive electronic systems
 EPFL Summer Reserach Institute 2007 July 3-21 2007 The design of safe automotive electronic systems Some problems, solutions and open issues (Francoise.Simonot@loria.fr) Nancy Université - LORIA (UMR 7503)
EPFL Summer Reserach Institute 2007 July 3-21 2007 The design of safe automotive electronic systems Some problems, solutions and open issues (Francoise.Simonot@loria.fr) Nancy Université - LORIA (UMR 7503)
Advances in Antenna Measurement Instrumentation and Systems
 Advances in Antenna Measurement Instrumentation and Systems Steven R. Nichols, Roger Dygert, David Wayne MI Technologies Suwanee, Georgia, USA Abstract Since the early days of antenna pattern recorders,
Advances in Antenna Measurement Instrumentation and Systems Steven R. Nichols, Roger Dygert, David Wayne MI Technologies Suwanee, Georgia, USA Abstract Since the early days of antenna pattern recorders,
Absolute encoder HE-65
 TR - ECE - TI - GB - 00041-01 04/08/2016 SLIN-BUS Absolute encoder HE-65 Technical Information TR-Electronic GmbH D-78647 Trossingen Eglishalde 6 Tel.: (0049) 07425/228-0 Fax: (0049) 07425/228-33 email:
TR - ECE - TI - GB - 00041-01 04/08/2016 SLIN-BUS Absolute encoder HE-65 Technical Information TR-Electronic GmbH D-78647 Trossingen Eglishalde 6 Tel.: (0049) 07425/228-0 Fax: (0049) 07425/228-33 email:
DATE: 17/08/2006 Issue No 2 e-plate Operation Overview
 Page 1 of 7 Fundamentals Introduction e-pate technology is the next generation of long range RFID (Radio Frequency IDentification). The objective is wireless and automated data collection of vehicles and
Page 1 of 7 Fundamentals Introduction e-pate technology is the next generation of long range RFID (Radio Frequency IDentification). The objective is wireless and automated data collection of vehicles and
ADVANCED DISTRIBUTED WIDEBAND DATA ACQUISITION SYSTEM
 ADVANCED DISTRIBUTED WIDEBAND DATA ACQUISITION SYSTEM Albert Berdugo Vice President of Advanced Product Development Teletronics Technology Corporation Newtown, PA USA ABSTRACT Wideband data acquisition
ADVANCED DISTRIBUTED WIDEBAND DATA ACQUISITION SYSTEM Albert Berdugo Vice President of Advanced Product Development Teletronics Technology Corporation Newtown, PA USA ABSTRACT Wideband data acquisition
Industrial Interface Standards Overview: RS-485/422, PROFIBUS, RS-232, CAN, LIN, I2C, IO-Link. October 2018 Transceiver Interface Products
 Industrial Interface Standards Overview: RS-485/422, PROFIBUS, RS-232, CAN, LIN, I2C, IO-Link October 2018 Transceiver Interface Products 1 Agenda Following standards will be covered RS-485 RS-422 ProfiBus
Industrial Interface Standards Overview: RS-485/422, PROFIBUS, RS-232, CAN, LIN, I2C, IO-Link October 2018 Transceiver Interface Products 1 Agenda Following standards will be covered RS-485 RS-422 ProfiBus
Lecture 8: Media Access Control. CSE 123: Computer Networks Stefan Savage
 Lecture 8: Media Access Control CSE 123: Computer Networks Stefan Savage Overview Methods to share physical media: multiple access Fixed partitioning Random access Channelizing mechanisms Contention-based
Lecture 8: Media Access Control CSE 123: Computer Networks Stefan Savage Overview Methods to share physical media: multiple access Fixed partitioning Random access Channelizing mechanisms Contention-based
COVER STORY. how this new architecture will help carmakers master the complexity of autonomous driving.
 COVER STORY Semiconductors NXP ESTABLISHED AND NEW PLAYERS The era of self-driving cars places semiconductor companies at the center of important discussions about standards, methodologies, and design
COVER STORY Semiconductors NXP ESTABLISHED AND NEW PLAYERS The era of self-driving cars places semiconductor companies at the center of important discussions about standards, methodologies, and design
From Shared Memory to Message Passing
 From Shared Memory to Message Passing Stefan Schmid T-Labs / TU Berlin Some parts of the lecture, parts of the Skript and exercises will be based on the lectures of Prof. Roger Wattenhofer at ETH Zurich
From Shared Memory to Message Passing Stefan Schmid T-Labs / TU Berlin Some parts of the lecture, parts of the Skript and exercises will be based on the lectures of Prof. Roger Wattenhofer at ETH Zurich
HCM1A1305 Automotive grade High current power inductors
 Technical Data Effective September HCMA Automotive grade High current power inductors Product features AEC-Q Grade qualified High current carrying capacity Magnetically shielded, low EMI Frequency range
Technical Data Effective September HCMA Automotive grade High current power inductors Product features AEC-Q Grade qualified High current carrying capacity Magnetically shielded, low EMI Frequency range
Tunnel Radio. STRABAG Infrastructure & Safety Solutions
 Tunnel Radio STRABAG Infrastructure & Safety Solutions 2 STRABAG Infrastructure & Safety Solutions Tunnel Radio We set standards STRABAG Infrastructure & Safety Solutions, or SISS for short, is a 100%
Tunnel Radio STRABAG Infrastructure & Safety Solutions 2 STRABAG Infrastructure & Safety Solutions Tunnel Radio We set standards STRABAG Infrastructure & Safety Solutions, or SISS for short, is a 100%
Analysis and Optimisation of Distributed Embedded Systems with Heterogeneous Scheduling Policies
 Linköping Studies in Science and Technology Dissertation No. 1089 Analysis and Optimisation of Distributed Embedded Systems with Heterogeneous Scheduling Policies by Traian Pop Department of Computer and
Linköping Studies in Science and Technology Dissertation No. 1089 Analysis and Optimisation of Distributed Embedded Systems with Heterogeneous Scheduling Policies by Traian Pop Department of Computer and
Distributed Control-as-a-Service with Wireless Swarm Systems"
 Distributed Control-as-a-Service with Wireless Swarm Systems" Prof. Rahul Mangharam Director, Real-Time & Embedded Systems Lab Dept. Electrical & Systems Engineering Dept. Computer & Information Science
Distributed Control-as-a-Service with Wireless Swarm Systems" Prof. Rahul Mangharam Director, Real-Time & Embedded Systems Lab Dept. Electrical & Systems Engineering Dept. Computer & Information Science
Dual Protocol Transceivers Ease the Design of Industrial Interfaces
 Dual Protocol Transceivers Ease the Design of Industrial Interfaces Introduction The trend in industrial PC designs towards smaller form factors and more communication versatility is driving the development
Dual Protocol Transceivers Ease the Design of Industrial Interfaces Introduction The trend in industrial PC designs towards smaller form factors and more communication versatility is driving the development
A Quantifying Notions of Extensibility in FlexRay Schedule Synthesis 1
 A Quantifying Notions of Extensibility in FlexRay Schedule Synthesis 1 REINHARD SCHNEIDER, TU Munich, Germany DIP GOSWAMI, Eindhoven University of Technology, Netherlands SAMARJIT CHAKRABORTY, TU Munich,
A Quantifying Notions of Extensibility in FlexRay Schedule Synthesis 1 REINHARD SCHNEIDER, TU Munich, Germany DIP GOSWAMI, Eindhoven University of Technology, Netherlands SAMARJIT CHAKRABORTY, TU Munich,
Lecture 8: Media Access Control
 Lecture 8: Media Access Control CSE 123: Computer Networks Alex C. Snoeren HW 2 due NEXT WEDNESDAY Overview Methods to share physical media: multiple access Fixed partitioning Random access Channelizing
Lecture 8: Media Access Control CSE 123: Computer Networks Alex C. Snoeren HW 2 due NEXT WEDNESDAY Overview Methods to share physical media: multiple access Fixed partitioning Random access Channelizing
COLLECTING USER PERFORMANCE DATA IN A GROUP ENVIRONMENT
 WHITE PAPER GROUP DATA COLLECTION COLLECTING USER PERFORMANCE DATA IN A GROUP ENVIRONMENT North Pole Engineering Rick Gibbs 6/10/2015 Page 1 of 12 Ver 1.1 GROUP DATA QUICK LOOK SUMMARY This white paper
WHITE PAPER GROUP DATA COLLECTION COLLECTING USER PERFORMANCE DATA IN A GROUP ENVIRONMENT North Pole Engineering Rick Gibbs 6/10/2015 Page 1 of 12 Ver 1.1 GROUP DATA QUICK LOOK SUMMARY This white paper
Digital Radio in the car in 10 years
 Digital Radio in the car in 10 years 2017/06/21 D.Brion - Project Manager - Clarion Europe SAS 1 Media evolution in the car The first car radio appears in the 20 s but evolution is very slow, receiver
Digital Radio in the car in 10 years 2017/06/21 D.Brion - Project Manager - Clarion Europe SAS 1 Media evolution in the car The first car radio appears in the 20 s but evolution is very slow, receiver
Roland Kammerer. 13. October 2010
 Peripherals Roland Institute of Computer Engineering Vienna University of Technology 13. October 2010 Overview 1. Analog/Digital Converter (ADC) 2. Pulse Width Modulation (PWM) 3. Serial Peripheral Interface
Peripherals Roland Institute of Computer Engineering Vienna University of Technology 13. October 2010 Overview 1. Analog/Digital Converter (ADC) 2. Pulse Width Modulation (PWM) 3. Serial Peripheral Interface
Volkswagen Group: Leveraging VIRES VTD to Design a Cooperative Driver Assistance System
 Volkswagen Group: Leveraging VIRES VTD to Design a Cooperative Driver Assistance System By Dr. Kai Franke, Development Online Driver Assistance Systems, Volkswagen AG 10 Engineering Reality Magazine A
Volkswagen Group: Leveraging VIRES VTD to Design a Cooperative Driver Assistance System By Dr. Kai Franke, Development Online Driver Assistance Systems, Volkswagen AG 10 Engineering Reality Magazine A
Common Public Radio Interface. CPRI overview Input requirements for CPRI
 Common Public Radio Interface CPRI overview Input requirements for CPRI 11-Mar-2015 1 Some history Industrial cooperation jointly created by 5 parties: Ericsson, Huawei, NEC, Nortel Networks, Siemens Mobile
Common Public Radio Interface CPRI overview Input requirements for CPRI 11-Mar-2015 1 Some history Industrial cooperation jointly created by 5 parties: Ericsson, Huawei, NEC, Nortel Networks, Siemens Mobile
FlexRay Communications System. Electrical Physical Layer Specification. Version 2.1 Revision B
 FlexRay Communications System Electrical Physical Layer Specification Version 2.1 Revision B Disclaimer DISCLAIMER This specification as released by the FlexRay Consortium is intended for the purpose of
FlexRay Communications System Electrical Physical Layer Specification Version 2.1 Revision B Disclaimer DISCLAIMER This specification as released by the FlexRay Consortium is intended for the purpose of
TIME- OPTIMAL CONVERGECAST IN SENSOR NETWORKS WITH MULTIPLE CHANNELS
 TIME- OPTIMAL CONVERGECAST IN SENSOR NETWORKS WITH MULTIPLE CHANNELS A Thesis by Masaaki Takahashi Bachelor of Science, Wichita State University, 28 Submitted to the Department of Electrical Engineering
TIME- OPTIMAL CONVERGECAST IN SENSOR NETWORKS WITH MULTIPLE CHANNELS A Thesis by Masaaki Takahashi Bachelor of Science, Wichita State University, 28 Submitted to the Department of Electrical Engineering
The Physical Layer in the CAN FD world
 The Physical Layer in the CAN FD world Magnus-Maria Hell, Infineon Technologies The new CAN format CAN FD (CAN with flexible data rate) allows to increase the data rate in the data phase up to 10 MBit/sec.
The Physical Layer in the CAN FD world Magnus-Maria Hell, Infineon Technologies The new CAN format CAN FD (CAN with flexible data rate) allows to increase the data rate in the data phase up to 10 MBit/sec.
FlexRay Communications System. Electrical Physical Layer Specification. Version 3.0.1
 FlexRay Communications System Electrical Physical Layer Specification Version 3.0.1 Disclaimer DISCLAIMER This specification and the material contained in it, as released by the FlexRay Consortium, is
FlexRay Communications System Electrical Physical Layer Specification Version 3.0.1 Disclaimer DISCLAIMER This specification and the material contained in it, as released by the FlexRay Consortium, is
GC9838-LR - INTELLIGENT HYBRID PLC-RF DIN RAIL MODEM
 GC9838-LR - INTELLIGENT HYBRID PLC-RF DIN RAIL MODEM and a built-in sub-ghz wireless module to allow adaptive networking over different media. The wireless connectivity can be available in LoRa for tree-structure
GC9838-LR - INTELLIGENT HYBRID PLC-RF DIN RAIL MODEM and a built-in sub-ghz wireless module to allow adaptive networking over different media. The wireless connectivity can be available in LoRa for tree-structure
Qosmotec. Software Solutions GmbH. Technical Overview. QPER C2X - Car-to-X Signal Strength Emulator and HiL Test Bench. Page 1
 Qosmotec Software Solutions GmbH Technical Overview QPER C2X - Page 1 TABLE OF CONTENTS 0 DOCUMENT CONTROL...3 0.1 Imprint...3 0.2 Document Description...3 1 SYSTEM DESCRIPTION...4 1.1 General Concept...4
Qosmotec Software Solutions GmbH Technical Overview QPER C2X - Page 1 TABLE OF CONTENTS 0 DOCUMENT CONTROL...3 0.1 Imprint...3 0.2 Document Description...3 1 SYSTEM DESCRIPTION...4 1.1 General Concept...4
The physical layer in the CAN FD world The update
 The physical layer in the CAN FD world The update Magnus-Maria Hell, Infineon Technologies In automotive and industrial applications the CAN protocol is very well established. But in this applications
The physical layer in the CAN FD world The update Magnus-Maria Hell, Infineon Technologies In automotive and industrial applications the CAN protocol is very well established. But in this applications
Towards Automotive Embedded Systems with Self-X Properties
 21 Towards Automotive Embedded Systems with Self-X Properties Gereon Weiss, Marc Zeller and Dirk Eilers Fraunhofer Institute for Communication Systems ESK Germany 1. Introduction Since the first pieces
21 Towards Automotive Embedded Systems with Self-X Properties Gereon Weiss, Marc Zeller and Dirk Eilers Fraunhofer Institute for Communication Systems ESK Germany 1. Introduction Since the first pieces
ADAS & ADASIS v2. Sinisa Durekovic, NAVTEQ
 ADAS & ADASIS v2 Sinisa Durekovic, NAVTEQ Interrupts enabled! If you have question, please feel free to interrupt me! 2 Who am I? Sinisa Durekovic NAVTEQ, Principal Engineer, Team Lead SPM CE EMEA In-Vehicle
ADAS & ADASIS v2 Sinisa Durekovic, NAVTEQ Interrupts enabled! If you have question, please feel free to interrupt me! 2 Who am I? Sinisa Durekovic NAVTEQ, Principal Engineer, Team Lead SPM CE EMEA In-Vehicle
Keysight Technologies Triggering on and Decoding the PSI5 Sensor Serial Bus
 Keysight Technologies Triggering on and Decoding the PSI5 Sensor Serial Bus Using Keysight InfiniiVision X-Series Oscilloscopes Application Note Introduction The Peripheral Sensor Interface 5 (PSI5) serial
Keysight Technologies Triggering on and Decoding the PSI5 Sensor Serial Bus Using Keysight InfiniiVision X-Series Oscilloscopes Application Note Introduction The Peripheral Sensor Interface 5 (PSI5) serial
Automotive Sensor Signal Conditioner with LIN and PWM Interface
 Automotive Sensor Signal Conditioner with LIN and PWM Interface ZSSC3170 Functional Description Contents 1 Control Logic... 4 1.1 General Description... 4 1.2 CMC Description... 4 1.3 General Working Modes...
Automotive Sensor Signal Conditioner with LIN and PWM Interface ZSSC3170 Functional Description Contents 1 Control Logic... 4 1.1 General Description... 4 1.2 CMC Description... 4 1.3 General Working Modes...
EUROPEAN ETS TELECOMMUNICATION July 1997 STANDARD
 EUROPEAN ETS 300 719-2 TELECOMMUNICATION July 1997 STANDARD Source: ETSI TC-RES Reference: DE/RES-04005-2 ICS: 33.020 Key words: Paging, private, radio Radio Equipment and Systems (RES); Private wide area
EUROPEAN ETS 300 719-2 TELECOMMUNICATION July 1997 STANDARD Source: ETSI TC-RES Reference: DE/RES-04005-2 ICS: 33.020 Key words: Paging, private, radio Radio Equipment and Systems (RES); Private wide area
737 LF/HF/VHF/UHF/SHF Spectrum Monitoring System
 737 LF/HF/VHF/UHF/SHF Spectrum Monitoring System The ITU-Compliant TCI Model 737 is the highest performance member of TCI s 700 series of fieldproven Spectrum Monitoring Systems (SMS), which addresses
737 LF/HF/VHF/UHF/SHF Spectrum Monitoring System The ITU-Compliant TCI Model 737 is the highest performance member of TCI s 700 series of fieldproven Spectrum Monitoring Systems (SMS), which addresses
MicroAutoBox. Platform for in-vehicle function prototyping Variants with CAN, LIN and FlexRay interfaces
 MicroAutoBox Platform for in-vehicle function prototyping Variants with CAN, LIN and FlexRay interfaces dspace MicroAutoBox Hardware MicroAutoBox Compact, stand-alone prototyping unit Key Features Develop,
MicroAutoBox Platform for in-vehicle function prototyping Variants with CAN, LIN and FlexRay interfaces dspace MicroAutoBox Hardware MicroAutoBox Compact, stand-alone prototyping unit Key Features Develop,
Performance Analysis of Distributed Control Systems Using the FlexRay Protocol
 Preprints of the 19th World Congress The International Federation of Automatic Control Performance Analysis of Distributed Control Systems Using the FlexRay Protocol Thiago J. Michelin João M. G. da Silva,
Preprints of the 19th World Congress The International Federation of Automatic Control Performance Analysis of Distributed Control Systems Using the FlexRay Protocol Thiago J. Michelin João M. G. da Silva,
MOBILE TRAIN RADIO COMMUNICATION
 MOBILE TRAIN RADIO COMMUNICATION Dr. W.U.Khan Palash Kar Department of Computer Science S.G.S.I.T.S Indore ABSTRACT 1.0 INTRODUCTION 1.1 Mobile Communications Principles Each mobile uses a separate, temporary
MOBILE TRAIN RADIO COMMUNICATION Dr. W.U.Khan Palash Kar Department of Computer Science S.G.S.I.T.S Indore ABSTRACT 1.0 INTRODUCTION 1.1 Mobile Communications Principles Each mobile uses a separate, temporary
THIS article focuses on the design of an advanced
 IEEE ACCESS JOURNAL, VOL. XX, NO. X, JULY 2014 1 A Novel MPSoC and Control Architecture for Multi-Standard RF Transceivers Siegfried Brandstätter, and Mario Huemer, Senior Member, IEEE Abstract The introduction
IEEE ACCESS JOURNAL, VOL. XX, NO. X, JULY 2014 1 A Novel MPSoC and Control Architecture for Multi-Standard RF Transceivers Siegfried Brandstätter, and Mario Huemer, Senior Member, IEEE Abstract The introduction