SECTION 7: FREQUENCY DOMAIN ANALYSIS. MAE 3401 Modeling and Simulation
|
|
|
- Alvin Parrish
- 5 years ago
- Views:
Transcription
1 SECTION 7: FREQUENCY DOMAIN ANALYSIS MAE 3401 Modeling and Simulation
2 2 Response to Sinusoidal Inputs
3 Frequency Domain Analysis Introduction 3 We ve looked at system impulse and step responses Also interested in the response to periodic inputs Fourier theory tells us that any periodic signal can be represented as a sum of harmonically related sinusoids The Fourier series: 2 cos 2 sin 2 where and are given by the Fourier integrals Sinusoids are basis signals from which all other periodic signals can be constructed Sinusoidal system response is of particular interest

4 Fourier Series 4
5 System Response to a Sinusoidal Input 5 Consider an order system poles:,, Real or complex Assume all are distinct Transfer function is: (1) Apply a sinusoidal input to the system sin Output is given by (2)
6 System Response to a Sinusoidal Input 6 Partial fraction expansion of (2) gives (3) Inverse transform of (3) gives the time domain output cos sin (4) transient steady state Two portions of the response: Transient Decaying exponentials or sinusoids goes to zero in steady state Natural response to initial conditions Steady state Due to the input sinusoidal in steady state
7 Steady State Sinusoidal Response 7 We are interested in the steady state response cos sin (5) A trig. identity provides insight into : where cos sin tan sin Steady state response to a sinusoidal input sin is a sinusoid of the same frequency, but, in general different amplitude and phase sin Where (6) and tan
8 Steady State Sinusoidal Response 8 sin sin Steady state sinusoidal response is a scaled and phase shifted sinusoid of the same frequency Equal frequency is a property of linear systems Note the term in the numerator of (3) will affect the residues Residues determine amplitude and phase of the output Output amplitude and phase are frequency dependent sin
9 Steady State Sinusoidal Response 9 sin Linear System sin Gain the ratio of amplitudes of the output and input of the system Phase phase difference between system input and output Systems will, in general, exhibit frequency dependent gain and phase We d like to be able to determine these functions of frequency The system s frequency response
10 10 Frequency Response A system s frequency response, or sinusoidal transfer function, describes its gain and phase shift for sinusoidal inputs as a function of frequency.
11 Frequency Response 11 System output in the Laplace domain is Multiplication in the Laplace domain corresponds to convolution in the time domain Consider an exponential input of the form where is the complex Laplace variable: Now the output is (1)
12 Frequency Response 12 (1) We re interested in the steady state response, so let the upper limit of integration go to infinity (2) Time domain response to an exponential input is the time domain input multiplied by the system transfer function What is this input? (3) If we let 0, i.e. let, then we have (4)
13 Euler s Formula 13 Recall Euler s formula: cos sin (5) From which it follows that and cos sin (6) (7)
14 Frequency Response 14 We re interested in the sinusoidal steady state system response, so let the input be cos A sum of complex exponentials in the form of (3) We ve let in the first term and in the second 2 (8) According to (4) the output in response to (8) will be (9)
15 Frequency Response 15 (9) is a complex function of frequency Evaluates to a complex number at each value of Has both magnitude and phase Can be expressed in polar form as where It follows that (10) and (11)
16 Frequency Response 16 Using (11), the output given by (9) becomes (12) where, again (13) and (14)
17 Frequency response Function 17 is the system s frequency response function Transfer function, where (15) A complex valued function of frequency at each is the gain at that frequency Ratio of output amplitude to input amplitude at each is the phase at that frequency Phase shift between input and output sinusoids Another representation of system behavior Along with state space model, impulse/step responses, transfer function, etc. Typically represented graphically
18 Plotting the Frequency Response Function 18 is a complex valued function of frequency Has both magnitude and phase Plot gain and phase separately Frequency response plots formatted as Bode plots Two sets of axes: gain on top, phase below Identical, logarithmic frequency axes Gain axis is logarithmic either explicitly or as units of decibels (db) Phase axis is linear with units of degrees
19 Bode Plots 19 Units of magnitude are db Magnitude plot on top Logarithmic frequency axes Units of phase are degrees Phase plot below
20 Interpreting Bode Plots 20 Bode plots tell you the gain and phase shift at all frequencies: choose a frequency, read gain and phase values from the plot For a 10KHz sinusoidal input, the gain is 0dB (1) and the phase shift is 0. For a 10MHz sinusoidal input, the gain is 32dB (0.025), and the phase shift is 176.
21 Interpreting Bode Plots 21
22 Decibels db 22 Frequency response gain most often expressed and plotted with units of decibels (db) A logarithmic scale Provides detail of very large and very small values on the same plot Commonly used for ratios of powers or amplitudes Conversion from a linear scale to db: 20 log Conversion from db to a linear scale: 10
23 Decibels db 23 Multiplying two gain values corresponds to adding their values in db E.g., the overall gain of cascaded systems Negative db values corresponds to sub unity gain Positive db values are gains greater than one db Linear db Linear /
24 Value of Logarithmic Axes db 24 Gain axis is linear in db A logarithmic scale Allows for displaying detail at very large and very small levels on the same plot Gain plotted in db Two resonant peaks clearly visible Linear gain scale Smaller peak has disappeared
25 Value of Logarithmic Axes db 25 Frequency axis is logarithmic Allows for displaying detail at very low and very high frequencies on the same plot Log frequency axis Can resolve frequency of both resonant peaks Linear frequency axis Lower resonant frequency is unclear
26 Gain Response Terminology 26 Corner frequency, cut off frequency, 3dB frequency: Frequency at which gain is 3dB below its low frequency value ~5 of peaking 2 This is the bandwidth of the system Peaking Any increase in gain above the low frequency gain
27 27 Response of 1 st and 2 nd Order Factors This section examines the frequency responses of first and second order transfer function factors.
28 Transfer Function Factors 28 We ve already seen that a transfer function denominator can be factored into firstand second order terms 2 The same is true of the numerator Can think of the transfer function as a product of the individual factors For example, consider the following system 2 Can rewrite as 1 1 2
29 Transfer Function Factors Think of this as three cascaded transfer functions,, or 1 1 2
30 Transfer Function Factors 30 In the Laplace domain, transfer function of a cascade of systems is the product of the individual transfer functions In the time domain, overall impulse response is the convolution of the individual impulse responses Same holds true in the frequency domain Frequency response of a cascade is the product of the individual frequency responses Or, the product of individual factors Instructive, therefore, to understand the responses of the individual factors First and second order poles and zeros
31 First Order Factors 31 First order factors Single, real poles or zeros In the Laplace domain:,,, In the frequency domain Pole/zero plots:,,,
32 First Order Factors Zero at the Origin 32 A differentiator Gain: Phase: 90,
33 First Order Factors Pole at the Origin 33 An integrator 1 1 Gain: 1 1 Phase: 90,
34 First Order Factors Single, Real Zero 34 Single, real zero at Gain: Phase: tan for for for for 0 90
35 First Order Factors Single, Real Zero 35 Corner frequency: For, gain increases at: 20/ 6/ From ~0.1 to ~10, phase increases at a rate of: ~45 / Rough approximation
36 First Order Factors Single, Real Pole 36 Single, real pole at 1 Gain: Phase: for 1 tan for for 1 1 for
37 First Order Factors Single, Real Pole 37 Corner frequency: For, gain decreases at: 20/ 6/ From ~0.1 to ~10, phase decreases at a rate of: ~ 45 / Rough approximation
38 Second Order Factors 38 Complex conjugate zeros 2 Complex conjugate poles 1 2, 1
39 2 nd Order Factors Complex Conjugate Zeros 39 Complex conjugate zeros at 2 Gain: for for for 2 Phase: for 0 for 2 90 for 180
40 2 nd Order Factors Complex Conjugate Zeros 40 Response may dip below low freq. value near Peaking increases as decreases Gain increases at 40/ or 12/ for Corner frequency depends on damping ratio, increases as decreases At, 90 Phase transition abruptness depends on
41 2 nd Order Factors Complex Conjugate Poles 41 Complex conjugate zeros at 1 2 Gain: Phase: for for for 1 2 for for for
42 2 nd Order Factors Complex Conjugate Poles 42 Response may peak above low freq. value near Peaking increases as decreases Gain decreases at 40/ or 12/ for Corner frequency depends on damping ratio, increases as decreases At, 90 Phase transition abruptness depends on
43 Pole Location and Peaking 43 Peaking is dependent on pole locations No peaking at all for 1/ maximally flat or Butterworth response
44 Frequency Response Components Example 44 Consider the following system The system s frequency response function is As we ve seen we can consider this a product of individual frequency response factors Overall response is the composite of the individual responses Product of individual gain responses sum in db Sum of individual phase responses
45 Frequency Response Components Example 45 Gain response
46 Frequency Response Components Example 46 Phase response
47 47 Bode Plot Construction In this section, we ll look at a method for sketching, by hand, a straight line, asymptotic approximation for a Bode plot.
48 Bode Plot Construction 48 We ve just seen that a system s frequency response function can be factored into first and secondorder terms Each factor contributes a component to the overall gain and phase responses Now, we ll look at a technique for manually sketching a system s Bode plot In practice, you ll almost always plot with a computer But, learning to do it by hand provides valuable insight We ll look at how to approximate Bode plots for each of the different factors
49 Bode Form of the Transfer function 49 Consider the general transfer function form: 2 2 We first want to put this into Bode form: The corresponding frequency response function, in Bode form, is Putting into Bode form requires putting each of the first and second order factors into Bode form
50 First Order Factors in Bode Form 50 First order frequency response factors include:,, For the first factor,, is a positive or negative integer Already in Bode form For the second two, divide through by, giving 1 and Here,, the corner frequency associated with that zero or pole, so 1 and
51 Second Order Factors in Bode Form 51 Second order frequency response factors include: 2 and Again, normalize the coefficient, giving 1 and / Putting each factor into its Bode form involves factoring out any DC gain component Lump all of DC gains together into a single gain constant,
52 Bode Plot Construction 52 Frequency response function in Bode form Product of a constant DC gain factor,, and firstand second order factors Plot the frequency response of each factor individually, then combine graphically Overall response is the product of individual factors Product of gain responses sum on a db scale Sum of phase responses
53 Bode Plot Construction 53 Bode plot construction procedure: 1. Put the sinusoidal transfer function into Bode form 2. Draw a straight line asymptotic approximation for the gain and phase response of each individual factor 3. Graphically add all individual response components and sketch the result Next, we ll look at the straight line asymptotic approximations for the Bode plots for each of the transfer function factors
54 Bode Plot Constant Gain Factor 54 Constant gain Constant Phase
55 Bode Plot Poles/Zeros at the Origin 55 0: zeros at the origin 0: poles at the origin Gain: Straight line Slope at 1 Phase: 90
56 Bode Plot First Order Zero 56 Single real zero at Gain: 0 for 20 6 for Straight line asymptotes intersect at,0 Phase: 0 for for 90 for 10 for
57 Bode Plot First Order Pole 57 Single real pole at Gain: 0 for 20 6 for Straight line asymptotes intersect at,0 Phase: for for 90 for 10 for
58 Bode Plot Second Order Zero 58 Complex conjugate zeros: Gain:, 0 for for Straight line asymptotes intersect at,0 2 1 dependent peaking around Phase: 0 for 90 for 180 for dependent slope through Sketch as step change at for low, 90 / for high, or in between
59 Bode Plot Second Order Pole 59 Complex conjugate poles: Gain:, 0 for for Straight line asymptotes intersect at, dependent peaking around Phase: 0 for 90 for 180 for dependent slope through Sketch as step change at for low, 90 / for high, or in between
60 Bode Plot Construction Example 60 Consider a system with the following transfer function The sinusoidal transfer function: Put it into Bode form Represent as a product of factors
61 Bode Plot Construction Example 61
62 Bode Plot Construction Example 62
63 63 Relationship between Pole/Zero Plots and Bode Plots It is also possible to calculate a system s frequency response directly from that system s pole/zero plot.
64 Bode Construction from Pole/Zero Plots 64 Transfer function can be expressed as Numerator is a product of first order zero terms Denominator is a product of first order pole terms is a point on the imaginary axis represents a vector from to represents a vector from to Gain is given by Phase can be calculated as Σ Σ Possible to evaluate the frequency graphically from a pole/zero diagram Not done in practice, but provides useful insight
65 Bode Construction from Pole/Zero Plots 65 Consider the following system: Evaluate at 2.5/ Gain: Phase:
66 66 Frequency and Time Domains A system s frequency response and it s various time domain responses are simply different perspectives on the same dynamic behavior.
67 Frequency and Time Domains 67 We ve seen many ways we can represent a system order differential equation Bond graph model State variable model Impulse response Step response Transfer function Frequency response/bode plot Time domain representations Frequency domain representations All are valid and complete models They all contain the same information in different forms Different ways of looking at the same thing
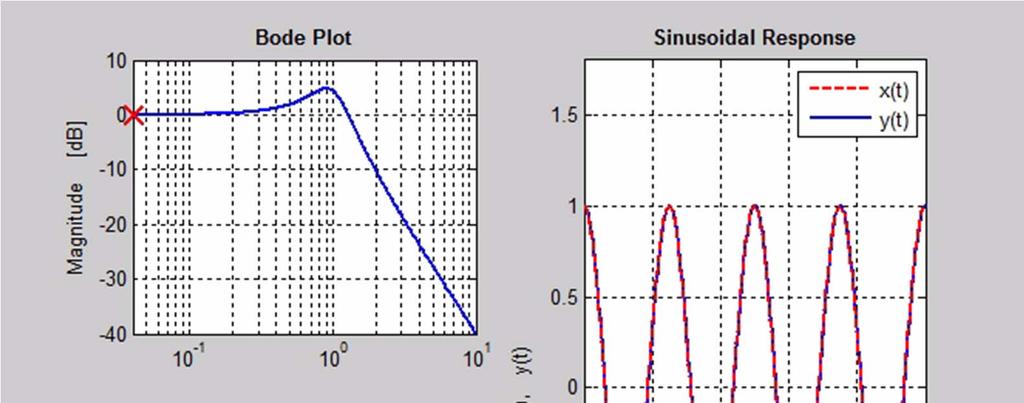
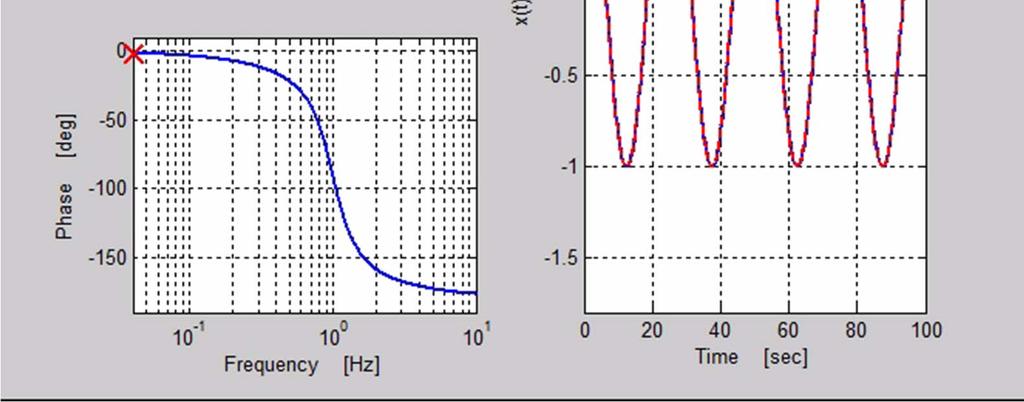
68 Time/Frequency Domain Correlation
69 69 Frequency Domain Analysis in MATLAB As was the case for time domain simulation, MATLAB has some useful functions for simulating system behavior in the frequency domain as well.
70 System Objects 70 MATLAB has data types dedicated to linear system models Two primary system model objects: State space model Transfer function model Objects created by calling MATLAB functions ss.m creates a state space model tf.m creates a transfer function model
71 State Space Model ss( ) 71 A: system matrix B: input matrix C: output matrix D: feed through matrix sys = ss(a,b,c,d) sys: state space model object State space model object will be used as an input to other MATLAB functions
72 Transfer Function Model tf( ) 72 sys = tf(num,den) Num: vector of numerator polynomial coefficients Den: vector of denominator polynomial coefficients sys: transfer function model object Transfer function is assumed to be of the form Inputs to tf( ) are Num = [b1,b2,,br+1]; Den = [a1,a2,,an+1];
73 Frequency Response Simulation bode( ) 73 [mag,phase] = bode(sys,w) sys: system model state space, transfer function, or other w: optional frequency vector in rad/sec mag: system gain response vector phase: system phase response vector in degrees If no outputs are specified, bode response is automatically plotted preferable to plot yourself Frequency vector input is optional If not specified, MATLAB will generate automatically May need to do: squeeze(mag) and squeeze(phase) to eliminate singleton dimensions of output matrices
74 Log spaced Vectors logspace( ) 74 f= logspace(x0,x1,n) x0: first point in f is 10 x1: last point in f is 10 N: number of points in f f: vector of logarithmically spaced points Generates and logarithmically spaced points between Useful for generating independent variable vectors for log plots (e.g., frequency vectors for bode plots) Linearly spaced on a logarithmic axis
Introduction to Signals and Systems Lecture #9 - Frequency Response. Guillaume Drion Academic year
 Introduction to Signals and Systems Lecture #9 - Frequency Response Guillaume Drion Academic year 2017-2018 1 Transmission of complex exponentials through LTI systems Continuous case: LTI system where
Introduction to Signals and Systems Lecture #9 - Frequency Response Guillaume Drion Academic year 2017-2018 1 Transmission of complex exponentials through LTI systems Continuous case: LTI system where
Modeling and Analysis of Systems Lecture #9 - Frequency Response. Guillaume Drion Academic year
 Modeling and Analysis of Systems Lecture #9 - Frequency Response Guillaume Drion Academic year 2015-2016 1 Outline Frequency response of LTI systems Bode plots Bandwidth and time-constant 1st order and
Modeling and Analysis of Systems Lecture #9 - Frequency Response Guillaume Drion Academic year 2015-2016 1 Outline Frequency response of LTI systems Bode plots Bandwidth and time-constant 1st order and
Frequency Response Analysis and Design Tutorial
 1 of 13 1/11/2011 5:43 PM Frequency Response Analysis and Design Tutorial I. Bode plots [ Gain and phase margin Bandwidth frequency Closed loop response ] II. The Nyquist diagram [ Closed loop stability
1 of 13 1/11/2011 5:43 PM Frequency Response Analysis and Design Tutorial I. Bode plots [ Gain and phase margin Bandwidth frequency Closed loop response ] II. The Nyquist diagram [ Closed loop stability
Bode Plots. Hamid Roozbahani
 Bode Plots Hamid Roozbahani A Bode plot is a graph of the transfer function of a linear, time-invariant system versus frequency, plotted with a logfrequency axis, to show the system's frequency response.
Bode Plots Hamid Roozbahani A Bode plot is a graph of the transfer function of a linear, time-invariant system versus frequency, plotted with a logfrequency axis, to show the system's frequency response.
CHAPTER 6 INTRODUCTION TO SYSTEM IDENTIFICATION
 CHAPTER 6 INTRODUCTION TO SYSTEM IDENTIFICATION Broadly speaking, system identification is the art and science of using measurements obtained from a system to characterize the system. The characterization
CHAPTER 6 INTRODUCTION TO SYSTEM IDENTIFICATION Broadly speaking, system identification is the art and science of using measurements obtained from a system to characterize the system. The characterization
Välkomna till TSRT15 Reglerteknik Föreläsning 5. Summary of lecture 4 Frequency response Bode plot
 Välkomna till TSRT15 Reglerteknik Föreläsning 5 Summary of lecture 4 Frequency response Bode plot Summary of last lecture 2 Given a pole polynomial with a varying parameter P(s)+KQ(s)=0 We draw the location
Välkomna till TSRT15 Reglerteknik Föreläsning 5 Summary of lecture 4 Frequency response Bode plot Summary of last lecture 2 Given a pole polynomial with a varying parameter P(s)+KQ(s)=0 We draw the location
LECTURE FOUR Time Domain Analysis Transient and Steady-State Response Analysis
 LECTURE FOUR Time Domain Analysis Transient and Steady-State Response Analysis 4.1 Transient Response and Steady-State Response The time response of a control system consists of two parts: the transient
LECTURE FOUR Time Domain Analysis Transient and Steady-State Response Analysis 4.1 Transient Response and Steady-State Response The time response of a control system consists of two parts: the transient
Bode and Log Magnitude Plots
 Bode and Log Magnitude Plots Bode Magnitude and Phase Plots System Gain and Phase Margins & Bandwidths Polar Plot and Bode Diagrams Transfer Function from Bode Plots Bode Plots of Open Loop and Closed
Bode and Log Magnitude Plots Bode Magnitude and Phase Plots System Gain and Phase Margins & Bandwidths Polar Plot and Bode Diagrams Transfer Function from Bode Plots Bode Plots of Open Loop and Closed
Poles and Zeros of H(s), Analog Computers and Active Filters
, Analog Computers and Active Filters") Poles and Zeros of H(s), Analog Computers and Active Filters Physics116A, Draft10/28/09 D. Pellett LRC Filter Poles and Zeros Pole structure same for all three functions (two poles) HR has two poles and
Poles and Zeros of H(s), Analog Computers and Active Filters Physics116A, Draft10/28/09 D. Pellett LRC Filter Poles and Zeros Pole structure same for all three functions (two poles) HR has two poles and
Boise State University Department of Electrical and Computer Engineering ECE 212L Circuit Analysis and Design Lab
 Objectives Boise State University Department of Electrical and Computer Engineering ECE L Circuit Analysis and Design Lab Experiment #0: Frequency esponse Measurements The objectives of this laboratory
Objectives Boise State University Department of Electrical and Computer Engineering ECE L Circuit Analysis and Design Lab Experiment #0: Frequency esponse Measurements The objectives of this laboratory
EE Experiment 8 Bode Plots of Frequency Response
 EE16:Exp8-1 EE 16 - Experiment 8 Bode Plots of Frequency Response Objectives: To illustrate the relationship between a system frequency response and the frequency response break frequencies, factor powers,
EE16:Exp8-1 EE 16 - Experiment 8 Bode Plots of Frequency Response Objectives: To illustrate the relationship between a system frequency response and the frequency response break frequencies, factor powers,
NH 67, Karur Trichy Highways, Puliyur C.F, Karur District DEPARTMENT OF INFORMATION TECHNOLOGY DIGITAL SIGNAL PROCESSING UNIT 3
 NH 67, Karur Trichy Highways, Puliyur C.F, 639 114 Karur District DEPARTMENT OF INFORMATION TECHNOLOGY DIGITAL SIGNAL PROCESSING UNIT 3 IIR FILTER DESIGN Structure of IIR System design of Discrete time
NH 67, Karur Trichy Highways, Puliyur C.F, 639 114 Karur District DEPARTMENT OF INFORMATION TECHNOLOGY DIGITAL SIGNAL PROCESSING UNIT 3 IIR FILTER DESIGN Structure of IIR System design of Discrete time
Bode plot, named after Hendrik Wade Bode, is usually a combination of a Bode magnitude plot and Bode phase plot:
 Bode plot From Wikipedia, the free encyclopedia A The Bode plot for a first-order (one-pole) lowpass filter Bode plot, named after Hendrik Wade Bode, is usually a combination of a Bode magnitude plot and
Bode plot From Wikipedia, the free encyclopedia A The Bode plot for a first-order (one-pole) lowpass filter Bode plot, named after Hendrik Wade Bode, is usually a combination of a Bode magnitude plot and
Lecture 17 z-transforms 2
 Lecture 17 z-transforms 2 Fundamentals of Digital Signal Processing Spring, 2012 Wei-Ta Chu 2012/5/3 1 Factoring z-polynomials We can also factor z-transform polynomials to break down a large system into
Lecture 17 z-transforms 2 Fundamentals of Digital Signal Processing Spring, 2012 Wei-Ta Chu 2012/5/3 1 Factoring z-polynomials We can also factor z-transform polynomials to break down a large system into
ECE : Circuits and Systems II
 ECE 202-001: Circuits and Systems II Spring 2019 Instructor: Bingsen Wang Classroom: NRB 221 Office: ERC C133 Lecture hours: MWF 8:00 8:50 am Tel: 517/355-0911 Office hours: M,W 3:00-4:30 pm Email: bingsen@egr.msu.edu
ECE 202-001: Circuits and Systems II Spring 2019 Instructor: Bingsen Wang Classroom: NRB 221 Office: ERC C133 Lecture hours: MWF 8:00 8:50 am Tel: 517/355-0911 Office hours: M,W 3:00-4:30 pm Email: bingsen@egr.msu.edu
, answer the next six questions.
 Frequency Response Problems Conceptual Questions 1) T/F Given f(t) = A cos (ωt + θ): The amplitude of the output in sinusoidal steady-state increases as K increases and decreases as ω increases. 2) T/F
Frequency Response Problems Conceptual Questions 1) T/F Given f(t) = A cos (ωt + θ): The amplitude of the output in sinusoidal steady-state increases as K increases and decreases as ω increases. 2) T/F
Lecture 3 Complex Exponential Signals
 Lecture 3 Complex Exponential Signals Fundamentals of Digital Signal Processing Spring, 2012 Wei-Ta Chu 2012/3/1 1 Review of Complex Numbers Using Euler s famous formula for the complex exponential The
Lecture 3 Complex Exponential Signals Fundamentals of Digital Signal Processing Spring, 2012 Wei-Ta Chu 2012/3/1 1 Review of Complex Numbers Using Euler s famous formula for the complex exponential The
The Discrete Fourier Transform. Claudia Feregrino-Uribe, Alicia Morales-Reyes Original material: Dr. René Cumplido
 The Discrete Fourier Transform Claudia Feregrino-Uribe, Alicia Morales-Reyes Original material: Dr. René Cumplido CCC-INAOE Autumn 2015 The Discrete Fourier Transform Fourier analysis is a family of mathematical
The Discrete Fourier Transform Claudia Feregrino-Uribe, Alicia Morales-Reyes Original material: Dr. René Cumplido CCC-INAOE Autumn 2015 The Discrete Fourier Transform Fourier analysis is a family of mathematical
Pole, zero and Bode plot
 Pole, zero and Bode plot EC04 305 Lecture notes YESAREKEY December 12, 2007 Authored by: Ramesh.K Pole, zero and Bode plot EC04 305 Lecture notes A rational transfer function H (S) can be expressed as
Pole, zero and Bode plot EC04 305 Lecture notes YESAREKEY December 12, 2007 Authored by: Ramesh.K Pole, zero and Bode plot EC04 305 Lecture notes A rational transfer function H (S) can be expressed as
Complex Digital Filters Using Isolated Poles and Zeroes
 Complex Digital Filters Using Isolated Poles and Zeroes Donald Daniel January 18, 2008 Revised Jan 15, 2012 Abstract The simplest possible explanation is given of how to construct software digital filters
Complex Digital Filters Using Isolated Poles and Zeroes Donald Daniel January 18, 2008 Revised Jan 15, 2012 Abstract The simplest possible explanation is given of how to construct software digital filters
CHAPTER 6 Frequency Response, Bode. Plots, and Resonance
 CHAPTER 6 Frequency Response, Bode Plots, and Resonance CHAPTER 6 Frequency Response, Bode Plots, and Resonance 1. State the fundamental concepts of Fourier analysis. 2. Determine the output of a filter
CHAPTER 6 Frequency Response, Bode Plots, and Resonance CHAPTER 6 Frequency Response, Bode Plots, and Resonance 1. State the fundamental concepts of Fourier analysis. 2. Determine the output of a filter
EEL2216 Control Theory CT2: Frequency Response Analysis
 EEL2216 Control Theory CT2: Frequency Response Analysis 1. Objectives (i) To analyse the frequency response of a system using Bode plot. (ii) To design a suitable controller to meet frequency domain and
EEL2216 Control Theory CT2: Frequency Response Analysis 1. Objectives (i) To analyse the frequency response of a system using Bode plot. (ii) To design a suitable controller to meet frequency domain and
2.1 BASIC CONCEPTS Basic Operations on Signals Time Shifting. Figure 2.2 Time shifting of a signal. Time Reversal.
 1 2.1 BASIC CONCEPTS 2.1.1 Basic Operations on Signals Time Shifting. Figure 2.2 Time shifting of a signal. Time Reversal. 2 Time Scaling. Figure 2.4 Time scaling of a signal. 2.1.2 Classification of Signals
1 2.1 BASIC CONCEPTS 2.1.1 Basic Operations on Signals Time Shifting. Figure 2.2 Time shifting of a signal. Time Reversal. 2 Time Scaling. Figure 2.4 Time scaling of a signal. 2.1.2 Classification of Signals
Cleveland State University MCE441: Intr. Linear Control Systems. Lecture 12: Frequency Response Concepts Bode Diagrams. Prof.
 Cleveland State University MCE441: Intr. Linear Control Systems Lecture 12: Concepts Bode Diagrams Prof. Richter 1 / 2 Control systems are affected by signals which are often unpredictable: noise, disturbances,
Cleveland State University MCE441: Intr. Linear Control Systems Lecture 12: Concepts Bode Diagrams Prof. Richter 1 / 2 Control systems are affected by signals which are often unpredictable: noise, disturbances,
BSNL TTA Question Paper Control Systems Specialization 2007
 BSNL TTA Question Paper Control Systems Specialization 2007 1. An open loop control system has its (a) control action independent of the output or desired quantity (b) controlling action, depending upon
BSNL TTA Question Paper Control Systems Specialization 2007 1. An open loop control system has its (a) control action independent of the output or desired quantity (b) controlling action, depending upon
System analysis and signal processing
 System analysis and signal processing with emphasis on the use of MATLAB PHILIP DENBIGH University of Sussex ADDISON-WESLEY Harlow, England Reading, Massachusetts Menlow Park, California New York Don Mills,
System analysis and signal processing with emphasis on the use of MATLAB PHILIP DENBIGH University of Sussex ADDISON-WESLEY Harlow, England Reading, Massachusetts Menlow Park, California New York Don Mills,
Low Pass Filter Introduction
 Low Pass Filter Introduction Basically, an electrical filter is a circuit that can be designed to modify, reshape or reject all unwanted frequencies of an electrical signal and accept or pass only those
Low Pass Filter Introduction Basically, an electrical filter is a circuit that can be designed to modify, reshape or reject all unwanted frequencies of an electrical signal and accept or pass only those
Microelectronic Circuits II. Ch 9 : Feedback
 Microelectronic Circuits II Ch 9 : Feedback 9.9 Determining the Loop Gain 9.0 The Stability problem 9. Effect on Feedback on the Amplifier Poles 9.2 Stability study using Bode plots 9.3 Frequency Compensation
Microelectronic Circuits II Ch 9 : Feedback 9.9 Determining the Loop Gain 9.0 The Stability problem 9. Effect on Feedback on the Amplifier Poles 9.2 Stability study using Bode plots 9.3 Frequency Compensation
AC BEHAVIOR OF COMPONENTS
 AC BEHAVIOR OF COMPONENTS AC Behavior of Capacitor Consider a capacitor driven by a sine wave voltage: I(t) 2 1 U(t) ~ C 0-1 -2 0 2 4 6 The current: is shifted by 90 o (sin cos)! 1.0 0.5 0.0-0.5-1.0 0
AC BEHAVIOR OF COMPONENTS AC Behavior of Capacitor Consider a capacitor driven by a sine wave voltage: I(t) 2 1 U(t) ~ C 0-1 -2 0 2 4 6 The current: is shifted by 90 o (sin cos)! 1.0 0.5 0.0-0.5-1.0 0
PYKC 13 Feb 2017 EA2.3 Electronics 2 Lecture 8-1
 In this lecture, I will cover amplitude and phase responses of a system in some details. What I will attempt to do is to explain how would one be able to obtain the frequency response from the transfer
In this lecture, I will cover amplitude and phase responses of a system in some details. What I will attempt to do is to explain how would one be able to obtain the frequency response from the transfer
Lab 6: Building a Function Generator
 ECE 212 Spring 2010 Circuit Analysis II Names: Lab 6: Building a Function Generator Objectives In this lab exercise you will build a function generator capable of generating square, triangle, and sine
ECE 212 Spring 2010 Circuit Analysis II Names: Lab 6: Building a Function Generator Objectives In this lab exercise you will build a function generator capable of generating square, triangle, and sine
Frequency Response Analysis
 Frequency Response Analysis Continuous Time * M. J. Roberts - All Rights Reserved 2 Frequency Response * M. J. Roberts - All Rights Reserved 3 Lowpass Filter H( s) = ω c s + ω c H( jω ) = ω c jω + ω c
Frequency Response Analysis Continuous Time * M. J. Roberts - All Rights Reserved 2 Frequency Response * M. J. Roberts - All Rights Reserved 3 Lowpass Filter H( s) = ω c s + ω c H( jω ) = ω c jω + ω c
Kent Bertilsson Muhammad Amir Yousaf
 Today s topics Analog System (Rev) Frequency Domain Signals in Frequency domain Frequency analysis of signals and systems Transfer Function Basic elements: R, C, L Filters RC Filters jw method (Complex
Today s topics Analog System (Rev) Frequency Domain Signals in Frequency domain Frequency analysis of signals and systems Transfer Function Basic elements: R, C, L Filters RC Filters jw method (Complex
Department of Electronic Engineering NED University of Engineering & Technology. LABORATORY WORKBOOK For the Course SIGNALS & SYSTEMS (TC-202)
") Department of Electronic Engineering NED University of Engineering & Technology LABORATORY WORKBOOK For the Course SIGNALS & SYSTEMS (TC-202) Instructor Name: Student Name: Roll Number: Semester: Batch:
Department of Electronic Engineering NED University of Engineering & Technology LABORATORY WORKBOOK For the Course SIGNALS & SYSTEMS (TC-202) Instructor Name: Student Name: Roll Number: Semester: Batch:
Frequency Division Multiplexing Spring 2011 Lecture #14. Sinusoids and LTI Systems. Periodic Sequences. x[n] = x[n + N]
![Frequency Division Multiplexing Spring 2011 Lecture #14. Sinusoids and LTI Systems. Periodic Sequences. x[n] = x[n + N]](/thumbs/88/116022205.jpg "Frequency Division Multiplexing Spring 2011 Lecture #14. Sinusoids and LTI Systems. Periodic Sequences. x[n] = x[n + N]") Frequency Division Multiplexing 6.02 Spring 20 Lecture #4 complex exponentials discrete-time Fourier series spectral coefficients band-limited signals To engineer the sharing of a channel through frequency
Frequency Division Multiplexing 6.02 Spring 20 Lecture #4 complex exponentials discrete-time Fourier series spectral coefficients band-limited signals To engineer the sharing of a channel through frequency
Department of Electronics &Electrical Engineering
 Department of Electronics &Electrical Engineering Question Bank- 3rd Semester, (Network Analysis & Synthesis) EE-201 Electronics & Communication Engineering TWO MARKS OUSTIONS: 1. Differentiate between
Department of Electronics &Electrical Engineering Question Bank- 3rd Semester, (Network Analysis & Synthesis) EE-201 Electronics & Communication Engineering TWO MARKS OUSTIONS: 1. Differentiate between
Low Pass Filter Rise Time vs Bandwidth
 AN119 Dataforth Corporation Page 1 of 7 DID YOU KNOW? The number googol is ten raised to the hundredth power or 1 followed by 100 zeros. Edward Kasner (1878-1955) a noted mathematician is best remembered
AN119 Dataforth Corporation Page 1 of 7 DID YOU KNOW? The number googol is ten raised to the hundredth power or 1 followed by 100 zeros. Edward Kasner (1878-1955) a noted mathematician is best remembered
A filter is appropriately described by the transfer function. It is a ratio between two polynomials
 Imaginary Part Matlab examples Filter description A filter is appropriately described by the transfer function. It is a ratio between two polynomials H(s) = N(s) D(s) = b ns n + b n s n + + b s a m s m
Imaginary Part Matlab examples Filter description A filter is appropriately described by the transfer function. It is a ratio between two polynomials H(s) = N(s) D(s) = b ns n + b n s n + + b s a m s m
1.What is frequency response? A frequency responses the steady state response of a system when the input to the system is a sinusoidal signal.
 Control Systems (EC 334) 1.What is frequency response? A frequency responses the steady state response of a system when the input to the system is a sinusoidal signal. 2.List out the different frequency
Control Systems (EC 334) 1.What is frequency response? A frequency responses the steady state response of a system when the input to the system is a sinusoidal signal. 2.List out the different frequency
Class #16: Experiment Matlab and Data Analysis
 Class #16: Experiment Matlab and Data Analysis Purpose: The objective of this experiment is to add to our Matlab skill set so that data can be easily plotted and analyzed with simple tools. Background:
Class #16: Experiment Matlab and Data Analysis Purpose: The objective of this experiment is to add to our Matlab skill set so that data can be easily plotted and analyzed with simple tools. Background:
ECE 3155 Experiment I AC Circuits and Bode Plots Rev. lpt jan 2013
 Signature Name (print, please) Lab section # Lab partner s name (if any) Date(s) lab was performed ECE 3155 Experiment I AC Circuits and Bode Plots Rev. lpt jan 2013 In this lab we will demonstrate basic
Signature Name (print, please) Lab section # Lab partner s name (if any) Date(s) lab was performed ECE 3155 Experiment I AC Circuits and Bode Plots Rev. lpt jan 2013 In this lab we will demonstrate basic
Signals and Systems Using MATLAB
 Signals and Systems Using MATLAB Second Edition Luis F. Chaparro Department of Electrical and Computer Engineering University of Pittsburgh Pittsburgh, PA, USA AMSTERDAM BOSTON HEIDELBERG LONDON NEW YORK
Signals and Systems Using MATLAB Second Edition Luis F. Chaparro Department of Electrical and Computer Engineering University of Pittsburgh Pittsburgh, PA, USA AMSTERDAM BOSTON HEIDELBERG LONDON NEW YORK
Lecture 9. Lab 16 System Identification (2 nd or 2 sessions) Lab 17 Proportional Control
 Lab 17 Proportional Control") 246 Lecture 9 Coming week labs: Lab 16 System Identification (2 nd or 2 sessions) Lab 17 Proportional Control Today: Systems topics System identification (ala ME4232) Time domain Frequency domain Proportional
246 Lecture 9 Coming week labs: Lab 16 System Identification (2 nd or 2 sessions) Lab 17 Proportional Control Today: Systems topics System identification (ala ME4232) Time domain Frequency domain Proportional
Lab 6 rev 2.1-kdp Lab 6 Time and frequency domain analysis of LTI systems
 Lab 6 Time and frequency domain analysis of LTI systems 1 I. GENERAL DISCUSSION In this lab and the next we will further investigate the connection between time and frequency domain responses. In this
Lab 6 Time and frequency domain analysis of LTI systems 1 I. GENERAL DISCUSSION In this lab and the next we will further investigate the connection between time and frequency domain responses. In this
Demonstrating in the Classroom Ideas of Frequency Response
 Rochester Institute of Technology RIT Scholar Works Presentations and other scholarship 1-7 Demonstrating in the Classroom Ideas of Frequency Response Mark A. Hopkins Rochester Institute of Technology
Rochester Institute of Technology RIT Scholar Works Presentations and other scholarship 1-7 Demonstrating in the Classroom Ideas of Frequency Response Mark A. Hopkins Rochester Institute of Technology
ECE 203 LAB 2 PRACTICAL FILTER DESIGN & IMPLEMENTATION
 Version 1. 1 of 7 ECE 03 LAB PRACTICAL FILTER DESIGN & IMPLEMENTATION BEFORE YOU BEGIN PREREQUISITE LABS ECE 01 Labs ECE 0 Advanced MATLAB ECE 03 MATLAB Signals & Systems EXPECTED KNOWLEDGE Understanding
Version 1. 1 of 7 ECE 03 LAB PRACTICAL FILTER DESIGN & IMPLEMENTATION BEFORE YOU BEGIN PREREQUISITE LABS ECE 01 Labs ECE 0 Advanced MATLAB ECE 03 MATLAB Signals & Systems EXPECTED KNOWLEDGE Understanding
DIGITAL FILTERS. !! Finite Impulse Response (FIR) !! Infinite Impulse Response (IIR) !! Background. !! Matlab functions AGC DSP AGC DSP
 !! Infinite Impulse Response (IIR) !! Background. !! Matlab functions AGC DSP AGC DSP") DIGITAL FILTERS!! Finite Impulse Response (FIR)!! Infinite Impulse Response (IIR)!! Background!! Matlab functions 1!! Only the magnitude approximation problem!! Four basic types of ideal filters with magnitude
DIGITAL FILTERS!! Finite Impulse Response (FIR)!! Infinite Impulse Response (IIR)!! Background!! Matlab functions 1!! Only the magnitude approximation problem!! Four basic types of ideal filters with magnitude
v(t) = V p sin(2π ft +φ) = V p cos(2π ft +φ + π 2 )
 = V p sin(2π ft +φ) = V p cos(2π ft +φ + π 2 )") 1 Let us revisit sine and cosine waves. A sine wave can be completely defined with three parameters Vp, the peak voltage (or amplitude), its frequency w in radians/second or f in cycles/second (Hz), and
1 Let us revisit sine and cosine waves. A sine wave can be completely defined with three parameters Vp, the peak voltage (or amplitude), its frequency w in radians/second or f in cycles/second (Hz), and
3.2 Measuring Frequency Response Of Low-Pass Filter :
 2.5 Filter Band-Width : In ideal Band-Pass Filters, the band-width is the frequency range in Hz where the magnitude response is at is maximum (or the attenuation is at its minimum) and constant and equal
2.5 Filter Band-Width : In ideal Band-Pass Filters, the band-width is the frequency range in Hz where the magnitude response is at is maximum (or the attenuation is at its minimum) and constant and equal
Active Filter Design Techniques
 Active Filter Design Techniques 16.1 Introduction What is a filter? A filter is a device that passes electric signals at certain frequencies or frequency ranges while preventing the passage of others.
Active Filter Design Techniques 16.1 Introduction What is a filter? A filter is a device that passes electric signals at certain frequencies or frequency ranges while preventing the passage of others.
Digital Processing of Continuous-Time Signals
 Chapter 4 Digital Processing of Continuous-Time Signals 清大電機系林嘉文 cwlin@ee.nthu.edu.tw 03-5731152 Original PowerPoint slides prepared by S. K. Mitra 4-1-1 Digital Processing of Continuous-Time Signals Digital
Chapter 4 Digital Processing of Continuous-Time Signals 清大電機系林嘉文 cwlin@ee.nthu.edu.tw 03-5731152 Original PowerPoint slides prepared by S. K. Mitra 4-1-1 Digital Processing of Continuous-Time Signals Digital
Lab 1: Simulating Control Systems with Simulink and MATLAB
 Lab 1: Simulating Control Systems with Simulink and MATLAB EE128: Feedback Control Systems Fall, 2006 1 Simulink Basics Simulink is a graphical tool that allows us to simulate feedback control systems.
Lab 1: Simulating Control Systems with Simulink and MATLAB EE128: Feedback Control Systems Fall, 2006 1 Simulink Basics Simulink is a graphical tool that allows us to simulate feedback control systems.
Digital Processing of
 Chapter 4 Digital Processing of Continuous-Time Signals 清大電機系林嘉文 cwlin@ee.nthu.edu.tw 03-5731152 Original PowerPoint slides prepared by S. K. Mitra 4-1-1 Digital Processing of Continuous-Time Signals Digital
Chapter 4 Digital Processing of Continuous-Time Signals 清大電機系林嘉文 cwlin@ee.nthu.edu.tw 03-5731152 Original PowerPoint slides prepared by S. K. Mitra 4-1-1 Digital Processing of Continuous-Time Signals Digital
ijdsp Workshop: Exercise 2012 DSP Exercise Objectives
 Objectives DSP Exercise The objective of this exercise is to provide hands-on experiences on ijdsp. It consists of three parts covering frequency response of LTI systems, pole/zero locations with the frequency
Objectives DSP Exercise The objective of this exercise is to provide hands-on experiences on ijdsp. It consists of three parts covering frequency response of LTI systems, pole/zero locations with the frequency
Resonator Factoring. Julius Smith and Nelson Lee
 Resonator Factoring Julius Smith and Nelson Lee RealSimple Project Center for Computer Research in Music and Acoustics (CCRMA) Department of Music, Stanford University Stanford, California 9435 March 13,
Resonator Factoring Julius Smith and Nelson Lee RealSimple Project Center for Computer Research in Music and Acoustics (CCRMA) Department of Music, Stanford University Stanford, California 9435 March 13,
[ á{tå TÄàt. Chapter Four. Time Domain Analysis of control system
 Chapter Four Time Domain Analysis of control system The time response of a control system consists of two parts: the transient response and the steady-state response. By transient response, we mean that
Chapter Four Time Domain Analysis of control system The time response of a control system consists of two parts: the transient response and the steady-state response. By transient response, we mean that
10. Introduction and Chapter Objectives
 Real Analog - Circuits Chapter 0: Steady-state Sinusoidal Analysis 0. Introduction and Chapter Objectives We will now study dynamic systems which are subjected to sinusoidal forcing functions. Previously,
Real Analog - Circuits Chapter 0: Steady-state Sinusoidal Analysis 0. Introduction and Chapter Objectives We will now study dynamic systems which are subjected to sinusoidal forcing functions. Previously,
THE HONG KONG POLYTECHNIC UNIVERSITY Department of Electronic and Information Engineering. EIE2106 Signal and System Analysis Lab 2 Fourier series
 THE HONG KONG POLYTECHNIC UNIVERSITY Department of Electronic and Information Engineering EIE2106 Signal and System Analysis Lab 2 Fourier series 1. Objective The goal of this laboratory exercise is to
THE HONG KONG POLYTECHNIC UNIVERSITY Department of Electronic and Information Engineering EIE2106 Signal and System Analysis Lab 2 Fourier series 1. Objective The goal of this laboratory exercise is to
Discrete Fourier Transform (DFT)
") Amplitude Amplitude Discrete Fourier Transform (DFT) DFT transforms the time domain signal samples to the frequency domain components. DFT Signal Spectrum Time Frequency DFT is often used to do frequency
Amplitude Amplitude Discrete Fourier Transform (DFT) DFT transforms the time domain signal samples to the frequency domain components. DFT Signal Spectrum Time Frequency DFT is often used to do frequency
Modeling Amplifiers as Analog Filters Increases SPICE Simulation Speed
 Modeling Amplifiers as Analog Filters Increases SPICE Simulation Speed By David Karpaty Introduction Simulation models for amplifiers are typically implemented with resistors, capacitors, transistors,
Modeling Amplifiers as Analog Filters Increases SPICE Simulation Speed By David Karpaty Introduction Simulation models for amplifiers are typically implemented with resistors, capacitors, transistors,
Structure of Speech. Physical acoustics Time-domain representation Frequency domain representation Sound shaping
 Structure of Speech Physical acoustics Time-domain representation Frequency domain representation Sound shaping Speech acoustics Source-Filter Theory Speech Source characteristics Speech Filter characteristics
Structure of Speech Physical acoustics Time-domain representation Frequency domain representation Sound shaping Speech acoustics Source-Filter Theory Speech Source characteristics Speech Filter characteristics
SAMPLING THEORY. Representing continuous signals with discrete numbers
 SAMPLING THEORY Representing continuous signals with discrete numbers Roger B. Dannenberg Professor of Computer Science, Art, and Music Carnegie Mellon University ICM Week 3 Copyright 2002-2013 by Roger
SAMPLING THEORY Representing continuous signals with discrete numbers Roger B. Dannenberg Professor of Computer Science, Art, and Music Carnegie Mellon University ICM Week 3 Copyright 2002-2013 by Roger
CHAPTER 9. Sinusoidal Steady-State Analysis
 CHAPTER 9 Sinusoidal Steady-State Analysis 9.1 The Sinusoidal Source A sinusoidal voltage source (independent or dependent) produces a voltage that varies sinusoidally with time. A sinusoidal current source
CHAPTER 9 Sinusoidal Steady-State Analysis 9.1 The Sinusoidal Source A sinusoidal voltage source (independent or dependent) produces a voltage that varies sinusoidally with time. A sinusoidal current source
Electric Circuit Theory
 Electric Circuit Theory Nam Ki Min nkmin@korea.ac.kr 010-9419-2320 Chapter 15 Active Filter Circuits Nam Ki Min nkmin@korea.ac.kr 010-9419-2320 Contents and Objectives 3 Chapter Contents 15.1 First-Order
Electric Circuit Theory Nam Ki Min nkmin@korea.ac.kr 010-9419-2320 Chapter 15 Active Filter Circuits Nam Ki Min nkmin@korea.ac.kr 010-9419-2320 Contents and Objectives 3 Chapter Contents 15.1 First-Order
SMS045 - DSP Systems in Practice. Lab 1 - Filter Design and Evaluation in MATLAB Due date: Thursday Nov 13, 2003
 SMS045 - DSP Systems in Practice Lab 1 - Filter Design and Evaluation in MATLAB Due date: Thursday Nov 13, 2003 Lab Purpose This lab will introduce MATLAB as a tool for designing and evaluating digital
SMS045 - DSP Systems in Practice Lab 1 - Filter Design and Evaluation in MATLAB Due date: Thursday Nov 13, 2003 Lab Purpose This lab will introduce MATLAB as a tool for designing and evaluating digital
STATION NUMBER: LAB SECTION: Filters. LAB 6: Filters ELECTRICAL ENGINEERING 43/100 INTRODUCTION TO MICROELECTRONIC CIRCUITS
 Lab 6: Filters YOUR EE43/100 NAME: Spring 2013 YOUR PARTNER S NAME: YOUR SID: YOUR PARTNER S SID: STATION NUMBER: LAB SECTION: Filters LAB 6: Filters Pre- Lab GSI Sign- Off: Pre- Lab: /40 Lab: /60 Total:
Lab 6: Filters YOUR EE43/100 NAME: Spring 2013 YOUR PARTNER S NAME: YOUR SID: YOUR PARTNER S SID: STATION NUMBER: LAB SECTION: Filters LAB 6: Filters Pre- Lab GSI Sign- Off: Pre- Lab: /40 Lab: /60 Total:
Electrical Engineering. Control Systems. Comprehensive Theory with Solved Examples and Practice Questions. Publications
 Electrical Engineering Control Systems Comprehensive Theory with Solved Examples and Practice Questions Publications Publications MADE EASY Publications Corporate Office: 44-A/4, Kalu Sarai (Near Hauz
Electrical Engineering Control Systems Comprehensive Theory with Solved Examples and Practice Questions Publications Publications MADE EASY Publications Corporate Office: 44-A/4, Kalu Sarai (Near Hauz
EES42042 Fundamental of Control Systems Bode Plots
 EES42042 Fundamental of Control Systems Bode Plots DR. Ir. Wahidin Wahab M.Sc. Ir. Aries Subiantoro M.Sc. 2 Bode Plots Plot of db Gain and phase vs frequency It is assumed you know how to construct Bode
EES42042 Fundamental of Control Systems Bode Plots DR. Ir. Wahidin Wahab M.Sc. Ir. Aries Subiantoro M.Sc. 2 Bode Plots Plot of db Gain and phase vs frequency It is assumed you know how to construct Bode
Digital Signal Processing
 Digital Signal Processing System Analysis and Design Paulo S. R. Diniz Eduardo A. B. da Silva and Sergio L. Netto Federal University of Rio de Janeiro CAMBRIDGE UNIVERSITY PRESS Preface page xv Introduction
Digital Signal Processing System Analysis and Design Paulo S. R. Diniz Eduardo A. B. da Silva and Sergio L. Netto Federal University of Rio de Janeiro CAMBRIDGE UNIVERSITY PRESS Preface page xv Introduction
JNTUWORLD. 6 The unity feedback system whose open loop transfer function is given by G(s)=K/s(s 2 +6s+10) Determine: (i) Angles of asymptotes *****
=K/s(s 2 +6s+10) Determine: (i) Angles of asymptotes *****") Code: 9A050 III B. Tech I Semester (R09) Regular Eaminations, November 0 Time: hours Ma Marks: 70 (a) What is a mathematical model of a physical system? Eplain briefly. (b) Write the differential equations
Code: 9A050 III B. Tech I Semester (R09) Regular Eaminations, November 0 Time: hours Ma Marks: 70 (a) What is a mathematical model of a physical system? Eplain briefly. (b) Write the differential equations
Advanced Circuits Topics Part 2 by Dr. Colton (Fall 2017)
") Part 2: Some Possibly New Things Advanced Circuits Topics Part 2 by Dr. Colton (Fall 2017) These are some topics that you may or may not have learned in Physics 220 and/or 145. This handout continues where
Part 2: Some Possibly New Things Advanced Circuits Topics Part 2 by Dr. Colton (Fall 2017) These are some topics that you may or may not have learned in Physics 220 and/or 145. This handout continues where
Communication Engineering Prof. Surendra Prasad Department of Electrical Engineering Indian Institute of Technology, Delhi
 Communication Engineering Prof. Surendra Prasad Department of Electrical Engineering Indian Institute of Technology, Delhi Lecture - 23 The Phase Locked Loop (Contd.) We will now continue our discussion
Communication Engineering Prof. Surendra Prasad Department of Electrical Engineering Indian Institute of Technology, Delhi Lecture - 23 The Phase Locked Loop (Contd.) We will now continue our discussion
Practice Test 3 (longer than the actual test will be) 1. Solve the following inequalities. Give solutions in interval notation. (Expect 1 or 2.
 1. Solve the following inequalities. Give solutions in interval notation. (Expect 1 or 2.") MAT 115 Spring 2015 Practice Test 3 (longer than the actual test will be) Part I: No Calculators. Show work. 1. Solve the following inequalities. Give solutions in interval notation. (Expect 1 or 2.) a.
MAT 115 Spring 2015 Practice Test 3 (longer than the actual test will be) Part I: No Calculators. Show work. 1. Solve the following inequalities. Give solutions in interval notation. (Expect 1 or 2.) a.
Fourier Analysis. Chapter Introduction Distortion Harmonic Distortion
 Chapter 5 Fourier Analysis 5.1 Introduction The theory, practice, and application of Fourier analysis are presented in the three major sections of this chapter. The theory includes a discussion of Fourier
Chapter 5 Fourier Analysis 5.1 Introduction The theory, practice, and application of Fourier analysis are presented in the three major sections of this chapter. The theory includes a discussion of Fourier
Open Loop Frequency Response
 TAKE HOME LABS OKLAHOMA STATE UNIVERSITY Open Loop Frequency Response by Carion Pelton 1 OBJECTIVE This experiment will reinforce your understanding of the concept of frequency response. As part of the
TAKE HOME LABS OKLAHOMA STATE UNIVERSITY Open Loop Frequency Response by Carion Pelton 1 OBJECTIVE This experiment will reinforce your understanding of the concept of frequency response. As part of the
Chapter 3 Exponential and Logarithmic Functions
 Chapter 3 Exponential and Logarithmic Functions Section 1 Section 2 Section 3 Section 4 Section 5 Exponential Functions and Their Graphs Logarithmic Functions and Their Graphs Properties of Logarithms
Chapter 3 Exponential and Logarithmic Functions Section 1 Section 2 Section 3 Section 4 Section 5 Exponential Functions and Their Graphs Logarithmic Functions and Their Graphs Properties of Logarithms
Design and comparison of butterworth and chebyshev type-1 low pass filter using Matlab
 Research Cell: An International Journal of Engineering Sciences ISSN: 2229-6913 Issue Sept 2011, Vol. 4 423 Design and comparison of butterworth and chebyshev type-1 low pass filter using Matlab Tushar
Research Cell: An International Journal of Engineering Sciences ISSN: 2229-6913 Issue Sept 2011, Vol. 4 423 Design and comparison of butterworth and chebyshev type-1 low pass filter using Matlab Tushar
George Mason University Signals and Systems I Spring 2016
 George Mason University Signals and Systems I Spring 2016 Laboratory Project #4 Assigned: Week of March 14, 2016 Due Date: Laboratory Section, Week of April 4, 2016 Report Format and Guidelines for Laboratory
George Mason University Signals and Systems I Spring 2016 Laboratory Project #4 Assigned: Week of March 14, 2016 Due Date: Laboratory Section, Week of April 4, 2016 Report Format and Guidelines for Laboratory
ECE438 - Laboratory 7a: Digital Filter Design (Week 1) By Prof. Charles Bouman and Prof. Mireille Boutin Fall 2015
 By Prof. Charles Bouman and Prof. Mireille Boutin Fall 2015") Purdue University: ECE438 - Digital Signal Processing with Applications 1 ECE438 - Laboratory 7a: Digital Filter Design (Week 1) By Prof. Charles Bouman and Prof. Mireille Boutin Fall 2015 1 Introduction
Purdue University: ECE438 - Digital Signal Processing with Applications 1 ECE438 - Laboratory 7a: Digital Filter Design (Week 1) By Prof. Charles Bouman and Prof. Mireille Boutin Fall 2015 1 Introduction
EXPERIMENT 8: LRC CIRCUITS
 EXPERIMENT 8: LRC CIRCUITS Equipment List S 1 BK Precision 4011 or 4011A 5 MHz Function Generator OS BK 2120B Dual Channel Oscilloscope V 1 BK 388B Multimeter L 1 Leeds & Northrup #1532 100 mh Inductor
EXPERIMENT 8: LRC CIRCUITS Equipment List S 1 BK Precision 4011 or 4011A 5 MHz Function Generator OS BK 2120B Dual Channel Oscilloscope V 1 BK 388B Multimeter L 1 Leeds & Northrup #1532 100 mh Inductor
EE202 Circuit Theory II , Spring
 EE202 Circuit Theory II 2018-2019, Spring I. Introduction & Review of Circuit Theory I (3 Hrs.) Introduction II. Sinusoidal Steady-State Analysis (Chapter 9 of Nilsson - 9 Hrs.) (by Y.Kalkan) The Sinusoidal
EE202 Circuit Theory II 2018-2019, Spring I. Introduction & Review of Circuit Theory I (3 Hrs.) Introduction II. Sinusoidal Steady-State Analysis (Chapter 9 of Nilsson - 9 Hrs.) (by Y.Kalkan) The Sinusoidal
Review of Filter Types
 ECE 440 FILTERS Review of Filters Filters are systems with amplitude and phase response that depends on frequency. Filters named by amplitude attenuation with relation to a transition or cutoff frequency.
ECE 440 FILTERS Review of Filters Filters are systems with amplitude and phase response that depends on frequency. Filters named by amplitude attenuation with relation to a transition or cutoff frequency.
PROBLEM SET 6. Note: This version is preliminary in that it does not yet have instructions for uploading the MATLAB problems.
 PROBLEM SET 6 Issued: 2/32/19 Due: 3/1/19 Reading: During the past week we discussed change of discrete-time sampling rate, introducing the techniques of decimation and interpolation, which is covered
PROBLEM SET 6 Issued: 2/32/19 Due: 3/1/19 Reading: During the past week we discussed change of discrete-time sampling rate, introducing the techniques of decimation and interpolation, which is covered
Background (What Do Line and Load Transients Tell Us about a Power Supply?)
") Maxim > Design Support > Technical Documents > Application Notes > Power-Supply Circuits > APP 3443 Keywords: line transient, load transient, time domain, frequency domain APPLICATION NOTE 3443 Line and
Maxim > Design Support > Technical Documents > Application Notes > Power-Supply Circuits > APP 3443 Keywords: line transient, load transient, time domain, frequency domain APPLICATION NOTE 3443 Line and
Instruction Manual for Concept Simulators. Signals and Systems. M. J. Roberts
 Instruction Manual for Concept Simulators that accompany the book Signals and Systems by M. J. Roberts March 2004 - All Rights Reserved Table of Contents I. Loading and Running the Simulators II. Continuous-Time
Instruction Manual for Concept Simulators that accompany the book Signals and Systems by M. J. Roberts March 2004 - All Rights Reserved Table of Contents I. Loading and Running the Simulators II. Continuous-Time
y(n)= Aa n u(n)+bu(n) b m sin(2πmt)= b 1 sin(2πt)+b 2 sin(4πt)+b 3 sin(6πt)+ m=1 x(t)= x = 2 ( b b b b
= Aa n u(n)+bu(n) b m sin(2πmt)= b 1 sin(2πt)+b 2 sin(4πt)+b 3 sin(6πt)+ m=1 x(t)= x = 2 ( b b b b") Exam 1 February 3, 006 Each subquestion is worth 10 points. 1. Consider a periodic sawtooth waveform x(t) with period T 0 = 1 sec shown below: (c) x(n)= u(n). In this case, show that the output has the
Exam 1 February 3, 006 Each subquestion is worth 10 points. 1. Consider a periodic sawtooth waveform x(t) with period T 0 = 1 sec shown below: (c) x(n)= u(n). In this case, show that the output has the
Signals A Preliminary Discussion EE442 Analog & Digital Communication Systems Lecture 2
 Signals A Preliminary Discussion EE442 Analog & Digital Communication Systems Lecture 2 The Fourier transform of single pulse is the sinc function. EE 442 Signal Preliminaries 1 Communication Systems and
Signals A Preliminary Discussion EE442 Analog & Digital Communication Systems Lecture 2 The Fourier transform of single pulse is the sinc function. EE 442 Signal Preliminaries 1 Communication Systems and
Lecture 18 Stability of Feedback Control Systems
 16.002 Lecture 18 Stability of Feedback Control Systems May 9, 2008 Today s Topics Stabilizing an unstable system Stability evaluation using frequency responses Take Away Feedback systems stability can
16.002 Lecture 18 Stability of Feedback Control Systems May 9, 2008 Today s Topics Stabilizing an unstable system Stability evaluation using frequency responses Take Away Feedback systems stability can
FX Basics. Filtering STOMPBOX DESIGN WORKSHOP. Esteban Maestre. CCRMA - Stanford University August 2013
 FX Basics STOMPBOX DESIGN WORKSHOP Esteban Maestre CCRMA - Stanford University August 2013 effects modify the frequency content of the audio signal, achieving boosting or weakening specific frequency bands
FX Basics STOMPBOX DESIGN WORKSHOP Esteban Maestre CCRMA - Stanford University August 2013 effects modify the frequency content of the audio signal, achieving boosting or weakening specific frequency bands
Kerwin, W.J. Passive Signal Processing The Electrical Engineering Handbook Ed. Richard C. Dorf Boca Raton: CRC Press LLC, 2000
 Kerwin, W.J. Passive Signal Processing The Electrical Engineering Handbook Ed. Richard C. Dorf Boca Raton: CRC Press LLC, 000 4 Passive Signal Processing William J. Kerwin University of Arizona 4. Introduction
Kerwin, W.J. Passive Signal Processing The Electrical Engineering Handbook Ed. Richard C. Dorf Boca Raton: CRC Press LLC, 000 4 Passive Signal Processing William J. Kerwin University of Arizona 4. Introduction
Section 7.2 Logarithmic Functions
 Math 150 c Lynch 1 of 6 Section 7.2 Logarithmic Functions Definition. Let a be any positive number not equal to 1. The logarithm of x to the base a is y if and only if a y = x. The number y is denoted
Math 150 c Lynch 1 of 6 Section 7.2 Logarithmic Functions Definition. Let a be any positive number not equal to 1. The logarithm of x to the base a is y if and only if a y = x. The number y is denoted
Sect Linear Equations in Two Variables
 99 Concept # Sect. - Linear Equations in Two Variables Solutions to Linear Equations in Two Variables In this chapter, we will examine linear equations involving two variables. Such equations have an infinite
99 Concept # Sect. - Linear Equations in Two Variables Solutions to Linear Equations in Two Variables In this chapter, we will examine linear equations involving two variables. Such equations have an infinite
Experiment 2: Transients and Oscillations in RLC Circuits
 Experiment 2: Transients and Oscillations in RLC Circuits Will Chemelewski Partner: Brian Enders TA: Nielsen See laboratory book #1 pages 5-7, data taken September 1, 2009 September 7, 2009 Abstract Transient
Experiment 2: Transients and Oscillations in RLC Circuits Will Chemelewski Partner: Brian Enders TA: Nielsen See laboratory book #1 pages 5-7, data taken September 1, 2009 September 7, 2009 Abstract Transient
Agilent Time Domain Analysis Using a Network Analyzer
 Agilent Time Domain Analysis Using a Network Analyzer Application Note 1287-12 0.0 0.045 0.6 0.035 Cable S(1,1) 0.4 0.2 Cable S(1,1) 0.025 0.015 0.005 0.0 1.0 1.5 2.0 2.5 3.0 3.5 4.0 Frequency (GHz) 0.005
Agilent Time Domain Analysis Using a Network Analyzer Application Note 1287-12 0.0 0.045 0.6 0.035 Cable S(1,1) 0.4 0.2 Cable S(1,1) 0.025 0.015 0.005 0.0 1.0 1.5 2.0 2.5 3.0 3.5 4.0 Frequency (GHz) 0.005
EE228 Applications of Course Concepts. DePiero
 EE228 Applications of Course Concepts DePiero Purpose Describe applications of concepts in EE228. Applications may help students recall and synthesize concepts. Also discuss: Some advanced concepts Highlight
EE228 Applications of Course Concepts DePiero Purpose Describe applications of concepts in EE228. Applications may help students recall and synthesize concepts. Also discuss: Some advanced concepts Highlight
PHYS225 Lecture 15. Electronic Circuits
 PHYS225 Lecture 15 Electronic Circuits Last lecture Difference amplifier Differential input; single output Good CMRR, accurate gain, moderate input impedance Instrumentation amplifier Differential input;
PHYS225 Lecture 15 Electronic Circuits Last lecture Difference amplifier Differential input; single output Good CMRR, accurate gain, moderate input impedance Instrumentation amplifier Differential input;
IIR Filter Design Chapter Intended Learning Outcomes: (i) Ability to design analog Butterworth filters
 Ability to design analog Butterworth filters") IIR Filter Design Chapter Intended Learning Outcomes: (i) Ability to design analog Butterworth filters (ii) Ability to design lowpass IIR filters according to predefined specifications based on analog
IIR Filter Design Chapter Intended Learning Outcomes: (i) Ability to design analog Butterworth filters (ii) Ability to design lowpass IIR filters according to predefined specifications based on analog
FREQUENCY RESPONSE AND PASSIVE FILTERS LABORATORY
 FREQUENCY RESPONSE AND PASSIVE FILTERS LABORATORY In this experiment we will analytically determine and measure the frequency response of networks containing resistors, AC source/sources, and energy storage
FREQUENCY RESPONSE AND PASSIVE FILTERS LABORATORY In this experiment we will analytically determine and measure the frequency response of networks containing resistors, AC source/sources, and energy storage
Electrical & Computer Engineering Technology
 Electrical & Computer Engineering Technology EET 419C Digital Signal Processing Laboratory Experiments by Masood Ejaz Experiment # 1 Quantization of Analog Signals and Calculation of Quantized noise Objective:
Electrical & Computer Engineering Technology EET 419C Digital Signal Processing Laboratory Experiments by Masood Ejaz Experiment # 1 Quantization of Analog Signals and Calculation of Quantized noise Objective:
Advanced Digital Signal Processing Part 5: Digital Filters
 Advanced Digital Signal Processing Part 5: Digital Filters Gerhard Schmidt Christian-Albrechts-Universität zu Kiel Faculty of Engineering Institute of Electrical and Information Engineering Digital Signal
Advanced Digital Signal Processing Part 5: Digital Filters Gerhard Schmidt Christian-Albrechts-Universität zu Kiel Faculty of Engineering Institute of Electrical and Information Engineering Digital Signal