Structured-Light Based Acquisition (Part 1)
|
|
|
- Brent Bennett
- 5 years ago
- Views:
Transcription
 CS635")

1 Structured-Light Based Acquisition (Part 1) CS635 Spring 2017 Daniel G. Aliaga Department of Computer Science Purdue University
2 Passive vs. Active Acquisition Passive + Just take pictures + Does not intrude in the environment (=passive) Some surfaces cannot be acquired Robustness is problematic Active + Emit light into the scene so as to force the generation of robust correspondence Environment is intruded (=active)
3 Active Acquisition Some options: Laser scanning Structured Light

4 Laser Scanning

5 Light Stripe Scanning (Single Stripe) Light plane Source Camera Surface Optical triangulation Project a single stripe of laser light Scan it across the surface of the object This is a very precise version of structured light scanning Good for high resolution 3D, but needs many images and takes time
6 Stripe Triangulation Object Light Plane Ax By Cz D 0 Laser Camera Project laser stripe onto object

7 Stripe Triangulation Object Light Plane Ax By Cz D 0 Laser Image Point ( x', y') Camera Depth from ray-plane triangulation: Intersect camera ray with light plane x y x' z / y' z / f f z Df Ax' By' Cf

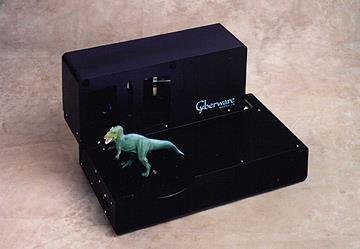
8 Example: Laser scanner + very accurate < 0.01 mm more than 10sec per scan Cyberware face and head scanner
9 Example: Laser scanner Digital Michelangelo Project




10 Example: Laser scanner Portable scanner by Minolta
11 Digital Projector Structured Light Goal: generate correspondences so as to enable a robust 3D reconstruction
12 Digital Projector Structured Light Method: Use the projector as a pattern generator Have the camera see the pattern and generate 1 or more corresponded points
13 Digital Projector Structured Light What are possible patterns? Spatial patterns Temporal patterns Color patterns And combinations of the above

14 Digital Projector Structured Light Lets focus on binary striped patterns










15 Binary Pattern Structured Light 15
16 Binary Coding Assign each pixel a unique illumination code over time [Posdamer 82] Time X coordinate
17 Binary Coding Assign each pixel a unique illumination code over time [Posdamer 82] Time Y coordinate


18 Binary Coding n 2 1 stripes in n images Projected over time Pattern 3 Example: 3 binary-encoded patterns which allows the measuring surface to be divided in 8 sub-regions Pattern 2 Pattern 1
19 Binary vs Gray Codes Decimal Binary Gray Code

20 Binary vs Gray Codes Pattern 3 Pattern 2 Pattern 1 Binary code Gray code









21 Standard Pixel Classification ON(1) OFF(0) 21 Uncertain

")
22 Pixel Classification Challenges? Illuminated (ON) Non-illuminated (OFF)?
23 Standard Pixel Classification Interval P off P on Common methods Simple threshold Albedo threshold Dual pattern 23
24 1. Simple Threshold User specifies one threshold t for all pixels p is ON P off t P on q is OFF
25 1. Simple Threshold User specifies two thresholds t 1, t 2 p is ON P off t 1 t 2 P on q is OFF
26 2. Albedo Threshold Compute the albedo t p for each pixel P off t p p is ON P on Albedo image
27 2. Albedo Threshold Compute the albedo t p for each pixel p is OFF P off t p P on Albedo image

28 3. Dual Pattern: Pattern and Inverse Without explicitly computing t p P off p is ON p is OFF P on Inverse pattern
29 Limitations of Standard Methods All three methods assume the two intervals do not overlap This is incorrect when there is strong indirect (global) light Haven t actually established the correct bounds

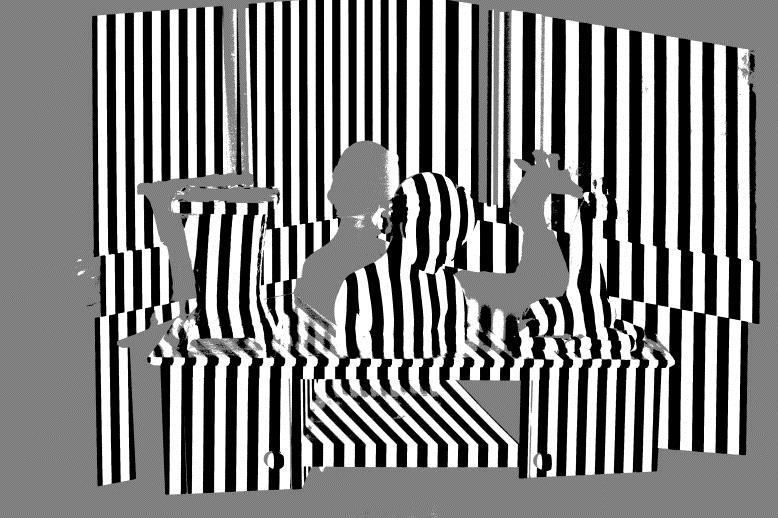
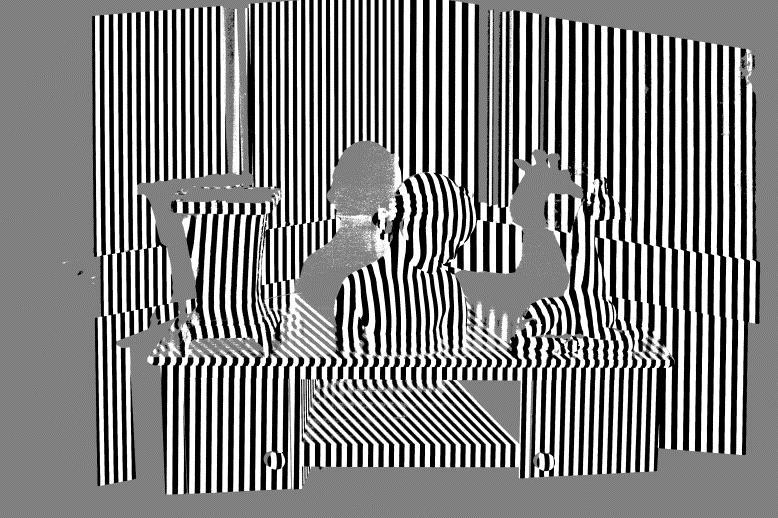
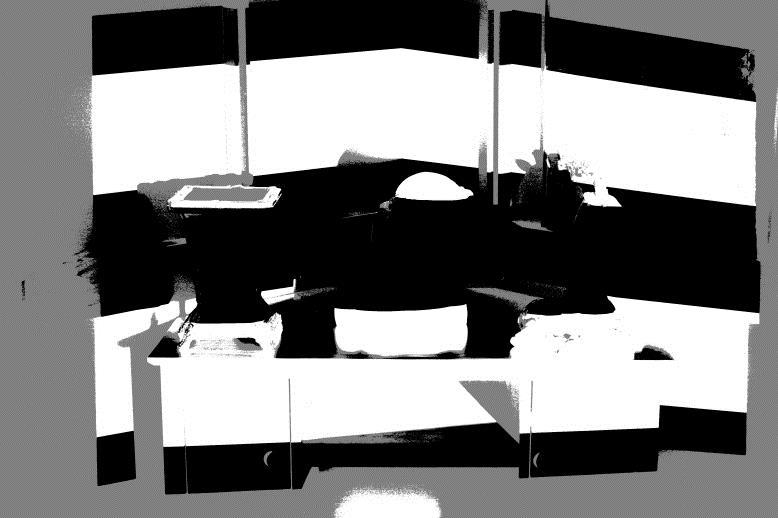
30 Example Reconstruction (lost samples are due to missing and incorrect classifications)
31 Key Observations We can estimate tight intensity value bounds for when the pixel is ON and for when it is OFF. A pixel is classifiable when its intensity value falls into one interval but not in the other. [Xu07, Xu09]
32 Example Comparison Point splatting of the reconstructed living room scene Using Using standard our pixel pixel classification
33 Pixel Intensity (p is ON) p p is directly illuminated p = d + i on Projector (direct) (indirect)

34 Pixel Intensity (p is OFF) p p is not directly illuminated p = i off Projector (indirect)
35 Pixel Intensity p = { d + i on i off If p is ON If p is OFF Chicken and egg problem is Need to know d, i on, i off to classify a pixel. Need to classify a pixel to know d, i on, i off ALL white pattern (all projector pixels on)
 components of each pixel")
.")
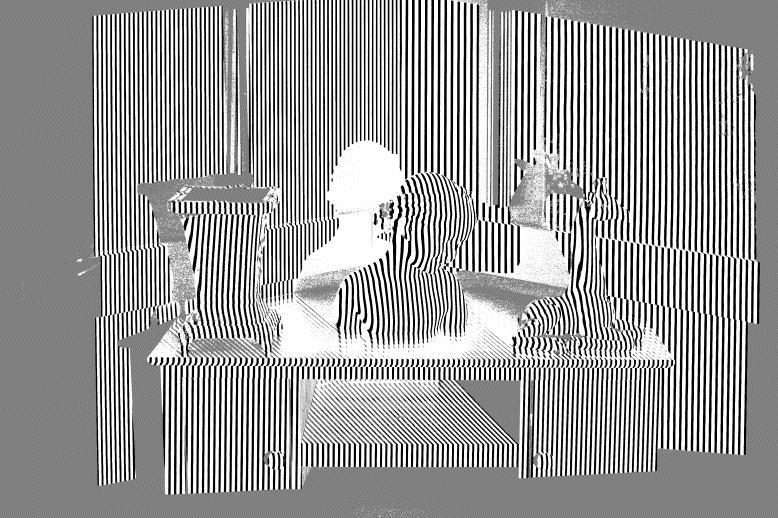
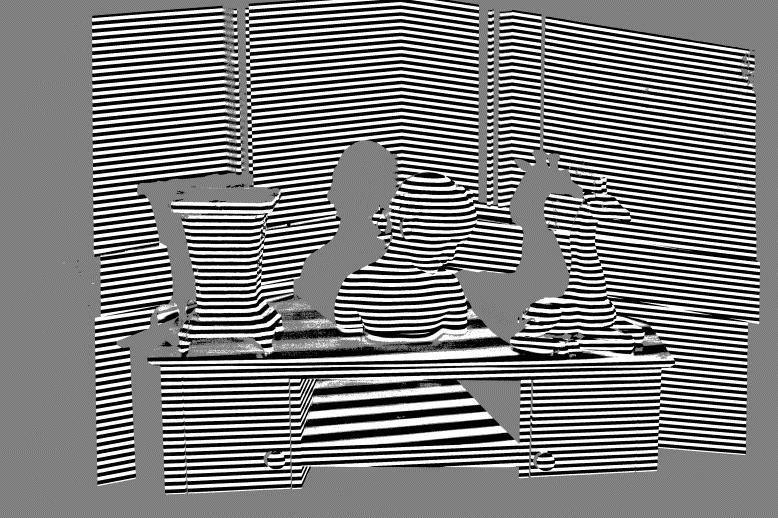
36 Direct and Indirect Separation Direct and indirect (global) components of each pixel under ALL white pattern can be separated easily (Nayar et al. SIGGRAPH 06). p = d + i total total
37 Direct and Indirect Separation Project high frequency binary pattern and its inverse to separate light components. Structured light patterns include the separation patterns. Thus, separation can be applied to previously captured data to obtain per pixel p = d total + i total
38 Pixel Classification Scenarios d total >i total 0 P off i total d total P on d total + i total 0 OFF ON 255
39 Pixel Classification Scenarios d total 0 0 d total P off P on i total d total + i total Uncertain
40 Pixel Classification Scenarios d total i total 0 P off i total d total P on d total+ i total 0 OFF Uncertain ON 255
41 Single Pattern Classification Rules d total < m pixel is uncertain p < min(d total, i total ) pixel is off p > max(d total, i total ) pixel is on otherwise pixel is uncertain
 OFF(0)")


42 Classification Results ON(1) OFF(0) Uncertain Hand-painted ground truth Standard pixel classification Our pixel classification
43 Classification Results ON(1) OFF(0) Uncertain Hand-painted ground truth Standard pixel classification Our pixel classification

44 Increased Reconstructed Points Point splatting of the reconstructed living room scene Using standard pixel classification Using our pixel classification

45 Increased Reconstructed Points Zoom-in view of the vase Using standard pixel classification Using our pixel classification


46 Increased Reconstructed Points Zoom-in view of the giraffe Using standard pixel classification Using our pixel classification

47 Increased Reconstructed Points Point splatting of the reconstructed wooden objects Using standard pixel classification Using our pixel classification


48 Increased Reconstructed Points Zoom-in view of the reconstructed points in white Using standard pixel classification Using our pixel classification




49 Increased Reconstructed Points Point splatting of the reconstructed shiny objects Bigger splat size Smaller splat size Using standard pixel classification Using our pixel classification
50 Another issue
51 Another issue Classify pixels at stripe boundaries? pixels at strip middle? all pixels?
Time of Flight Capture
 Time of Flight Capture CS635 Spring 2017 Daniel G. Aliaga Department of Computer Science Purdue University Range Acquisition Taxonomy Range acquisition Contact Transmissive Mechanical (CMM, jointed arm)
Time of Flight Capture CS635 Spring 2017 Daniel G. Aliaga Department of Computer Science Purdue University Range Acquisition Taxonomy Range acquisition Contact Transmissive Mechanical (CMM, jointed arm)
Exercise questions for Machine vision
 Exercise questions for Machine vision This is a collection of exercise questions. These questions are all examination alike which means that similar questions may appear at the written exam. I ve divided
Exercise questions for Machine vision This is a collection of exercise questions. These questions are all examination alike which means that similar questions may appear at the written exam. I ve divided
Acquisition and representation of images
 Acquisition and representation of images Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Methods for mage Processing academic year 2017 2018 Electromagnetic radiation λ = c ν
Acquisition and representation of images Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Methods for mage Processing academic year 2017 2018 Electromagnetic radiation λ = c ν
Acquisition and representation of images
 Acquisition and representation of images Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione delle immagini (Image processing I) academic year 2011 2012 Electromagnetic
Acquisition and representation of images Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione delle immagini (Image processing I) academic year 2011 2012 Electromagnetic
Lab 2. Logistics & Travel. Installing all the packages. Makeup class Recorded class Class time to work on lab Remote class
 Lab 2 Installing all the packages Logistics & Travel Makeup class Recorded class Class time to work on lab Remote class Classification of Sensors Proprioceptive sensors internal to robot Exteroceptive
Lab 2 Installing all the packages Logistics & Travel Makeup class Recorded class Class time to work on lab Remote class Classification of Sensors Proprioceptive sensors internal to robot Exteroceptive
Overview. Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image
 Camera & Color Overview Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image Book: Hartley 6.1, Szeliski 2.1.5, 2.2, 2.3 The trip
Camera & Color Overview Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image Book: Hartley 6.1, Szeliski 2.1.5, 2.2, 2.3 The trip
Practical work no. 3: Confocal Live Cell Microscopy
 Practical work no. 3: Confocal Live Cell Microscopy Course Instructor: Mikko Liljeström (MIU) 1 Background Confocal microscopy: The main idea behind confocality is that it suppresses the signal outside
Practical work no. 3: Confocal Live Cell Microscopy Course Instructor: Mikko Liljeström (MIU) 1 Background Confocal microscopy: The main idea behind confocality is that it suppresses the signal outside
CS 548: Computer Vision REVIEW: Digital Image Basics. Spring 2016 Dr. Michael J. Reale
 CS 548: Computer Vision REVIEW: Digital Image Basics Spring 2016 Dr. Michael J. Reale Human Vision System: Cones and Rods Two types of receptors in eye: Cones Brightness and color Photopic vision = bright-light
CS 548: Computer Vision REVIEW: Digital Image Basics Spring 2016 Dr. Michael J. Reale Human Vision System: Cones and Rods Two types of receptors in eye: Cones Brightness and color Photopic vision = bright-light
Lecture 19: Depth Cameras. Kayvon Fatahalian CMU : Graphics and Imaging Architectures (Fall 2011)
") Lecture 19: Depth Cameras Kayvon Fatahalian CMU 15-869: Graphics and Imaging Architectures (Fall 2011) Continuing theme: computational photography Cheap cameras capture light, extensive processing produces
Lecture 19: Depth Cameras Kayvon Fatahalian CMU 15-869: Graphics and Imaging Architectures (Fall 2011) Continuing theme: computational photography Cheap cameras capture light, extensive processing produces
Design of Temporally Dithered Codes for Increased Depth of Field in Structured Light Systems
 Design of Temporally Dithered Codes for Increased Depth of Field in Structured Light Systems Ricardo R. Garcia University of California, Berkeley Berkeley, CA rrgarcia@eecs.berkeley.edu Abstract In recent
Design of Temporally Dithered Codes for Increased Depth of Field in Structured Light Systems Ricardo R. Garcia University of California, Berkeley Berkeley, CA rrgarcia@eecs.berkeley.edu Abstract In recent
Image Formation. Dr. Gerhard Roth. COMP 4102A Winter 2014 Version 1
 Image Formation Dr. Gerhard Roth COMP 4102A Winter 2014 Version 1 Image Formation Two type of images Intensity image encodes light intensities (passive sensor) Range (depth) image encodes shape and distance
Image Formation Dr. Gerhard Roth COMP 4102A Winter 2014 Version 1 Image Formation Two type of images Intensity image encodes light intensities (passive sensor) Range (depth) image encodes shape and distance
3DUNDERWORLD-SLS v.3.0
 3DUNDERWORLD-SLS v.3.0 Rapid Scanning and Automatic 3D Reconstruction of Underwater Sites FP7-PEOPLE-2010-RG - 268256 3DUNDERWORLD Software Developer(s): Kyriakos Herakleous Researcher(s): Kyriakos Herakleous,
3DUNDERWORLD-SLS v.3.0 Rapid Scanning and Automatic 3D Reconstruction of Underwater Sites FP7-PEOPLE-2010-RG - 268256 3DUNDERWORLD Software Developer(s): Kyriakos Herakleous Researcher(s): Kyriakos Herakleous,
ABSTRACT 2. DESCRIPTION OF SENSORS
 Performance of a scanning laser line striper in outdoor lighting Christoph Mertz 1 Robotics Institute, Carnegie Mellon University, 5000 Forbes Ave., Pittsburgh, PA, USA 15213; ABSTRACT For search and rescue
Performance of a scanning laser line striper in outdoor lighting Christoph Mertz 1 Robotics Institute, Carnegie Mellon University, 5000 Forbes Ave., Pittsburgh, PA, USA 15213; ABSTRACT For search and rescue
Introduction to DSP ECE-S352 Fall Quarter 2000 Matlab Project 1
 Objective: Introduction to DSP ECE-S352 Fall Quarter 2000 Matlab Project 1 This Matlab Project is an extension of the basic correlation theory presented in the course. It shows a practical application
Objective: Introduction to DSP ECE-S352 Fall Quarter 2000 Matlab Project 1 This Matlab Project is an extension of the basic correlation theory presented in the course. It shows a practical application
Technology offer. Low cost system for measuring vibrations through cameras
 Technology offer Low cost system for measuring vibrations through cameras Technology offer: Low cost system for measuring vibrations through cameras SUMMARY A research group of the University of Alicante
Technology offer Low cost system for measuring vibrations through cameras Technology offer: Low cost system for measuring vibrations through cameras SUMMARY A research group of the University of Alicante
Image Formation. Dr. Gerhard Roth. COMP 4102A Winter 2015 Version 3
 Image Formation Dr. Gerhard Roth COMP 4102A Winter 2015 Version 3 1 Image Formation Two type of images Intensity image encodes light intensities (passive sensor) Range (depth) image encodes shape and distance
Image Formation Dr. Gerhard Roth COMP 4102A Winter 2015 Version 3 1 Image Formation Two type of images Intensity image encodes light intensities (passive sensor) Range (depth) image encodes shape and distance
Raster Images and Displays
 Raster Images and Displays CMSC 435 / 634 August 2013 Raster Images and Displays 1/23 Outline Overview Example Applications CMSC 435 / 634 August 2013 Raster Images and Displays 2/23 What is an image?
Raster Images and Displays CMSC 435 / 634 August 2013 Raster Images and Displays 1/23 Outline Overview Example Applications CMSC 435 / 634 August 2013 Raster Images and Displays 2/23 What is an image?
Computer Vision. Howie Choset Introduction to Robotics
 Computer Vision Howie Choset http://www.cs.cmu.edu.edu/~choset Introduction to Robotics http://generalrobotics.org What is vision? What is computer vision? Edge Detection Edge Detection Interest points
Computer Vision Howie Choset http://www.cs.cmu.edu.edu/~choset Introduction to Robotics http://generalrobotics.org What is vision? What is computer vision? Edge Detection Edge Detection Interest points
Applications of Flash and No-Flash Image Pairs in Mobile Phone Photography
 Applications of Flash and No-Flash Image Pairs in Mobile Phone Photography Xi Luo Stanford University 450 Serra Mall, Stanford, CA 94305 xluo2@stanford.edu Abstract The project explores various application
Applications of Flash and No-Flash Image Pairs in Mobile Phone Photography Xi Luo Stanford University 450 Serra Mall, Stanford, CA 94305 xluo2@stanford.edu Abstract The project explores various application
Learning to Predict Indoor Illumination from a Single Image. Chih-Hui Ho
 Learning to Predict Indoor Illumination from a Single Image Chih-Hui Ho 1 Outline Introduction Method Overview LDR Panorama Light Source Detection Panorama Recentering Warp Learning From LDR Panoramas
Learning to Predict Indoor Illumination from a Single Image Chih-Hui Ho 1 Outline Introduction Method Overview LDR Panorama Light Source Detection Panorama Recentering Warp Learning From LDR Panoramas
DICOM Correction Proposal
 Tracking Information - Administration Use Only DICOM Correction Proposal Correction Proposal Number Status CP-1713 Letter Ballot Date of Last Update 2018/01/23 Person Assigned Submitter Name David Clunie
Tracking Information - Administration Use Only DICOM Correction Proposal Correction Proposal Number Status CP-1713 Letter Ballot Date of Last Update 2018/01/23 Person Assigned Submitter Name David Clunie
Selection of Temporally Dithered Codes for Increasing Virtual Depth of Field in Structured Light Systems
 Selection of Temporally Dithered Codes for Increasing Virtual Depth of Field in Structured Light Systems Abstract Temporally dithered codes have recently been used for depth reconstruction of fast dynamic
Selection of Temporally Dithered Codes for Increasing Virtual Depth of Field in Structured Light Systems Abstract Temporally dithered codes have recently been used for depth reconstruction of fast dynamic
ROBOT VISION. Dr.M.Madhavi, MED, MVSREC
 ROBOT VISION Dr.M.Madhavi, MED, MVSREC Robotic vision may be defined as the process of acquiring and extracting information from images of 3-D world. Robotic vision is primarily targeted at manipulation
ROBOT VISION Dr.M.Madhavi, MED, MVSREC Robotic vision may be defined as the process of acquiring and extracting information from images of 3-D world. Robotic vision is primarily targeted at manipulation
8.2 IMAGE PROCESSING VERSUS IMAGE ANALYSIS Image processing: The collection of routines and
 8.1 INTRODUCTION In this chapter, we will study and discuss some fundamental techniques for image processing and image analysis, with a few examples of routines developed for certain purposes. 8.2 IMAGE
8.1 INTRODUCTION In this chapter, we will study and discuss some fundamental techniques for image processing and image analysis, with a few examples of routines developed for certain purposes. 8.2 IMAGE
Road Boundary Estimation in Construction Sites Michael Darms, Matthias Komar, Dirk Waldbauer, Stefan Lüke
 Road Boundary Estimation in Construction Sites Michael Darms, Matthias Komar, Dirk Waldbauer, Stefan Lüke Lanes in Construction Sites Roadway is often bounded by elevated objects (e.g. guidance walls)
Road Boundary Estimation in Construction Sites Michael Darms, Matthias Komar, Dirk Waldbauer, Stefan Lüke Lanes in Construction Sites Roadway is often bounded by elevated objects (e.g. guidance walls)
Commercial Scanners and Science
 Commercial Scanners and Science Specs vs Reality Ian Shelton - DDO Bob Simcoe - Harvard 4/28/2008 RJS Starting with Pixels Photosensitive area on the CCD chip This pixel would often be called a 4um pixel
Commercial Scanners and Science Specs vs Reality Ian Shelton - DDO Bob Simcoe - Harvard 4/28/2008 RJS Starting with Pixels Photosensitive area on the CCD chip This pixel would often be called a 4um pixel
A Structured Light Range Imaging System Using a Moving Correlation Code
 A Structured Light Range Imaging System Using a Moving Correlation Code Frank Pipitone Navy Center for Applied Research in Artificial Intelligence Naval Research Laboratory Washington, DC 20375-5337 USA
A Structured Light Range Imaging System Using a Moving Correlation Code Frank Pipitone Navy Center for Applied Research in Artificial Intelligence Naval Research Laboratory Washington, DC 20375-5337 USA
Superfast phase-shifting method for 3-D shape measurement
 Superfast phase-shifting method for 3-D shape measurement Song Zhang 1,, Daniel Van Der Weide 2, and James Oliver 1 1 Department of Mechanical Engineering, Iowa State University, Ames, IA 50011, USA 2
Superfast phase-shifting method for 3-D shape measurement Song Zhang 1,, Daniel Van Der Weide 2, and James Oliver 1 1 Department of Mechanical Engineering, Iowa State University, Ames, IA 50011, USA 2
Images and Displays. Lecture Steve Marschner 1
 Images and Displays Lecture 2 2008 Steve Marschner 1 Introduction Computer graphics: The study of creating, manipulating, and using visual images in the computer. What is an image? A photographic print?
Images and Displays Lecture 2 2008 Steve Marschner 1 Introduction Computer graphics: The study of creating, manipulating, and using visual images in the computer. What is an image? A photographic print?
Coded Aperture for Projector and Camera for Robust 3D measurement
 Coded Aperture for Projector and Camera for Robust 3D measurement Yuuki Horita Yuuki Matugano Hiroki Morinaga Hiroshi Kawasaki Satoshi Ono Makoto Kimura Yasuo Takane Abstract General active 3D measurement
Coded Aperture for Projector and Camera for Robust 3D measurement Yuuki Horita Yuuki Matugano Hiroki Morinaga Hiroshi Kawasaki Satoshi Ono Makoto Kimura Yasuo Takane Abstract General active 3D measurement
Dynamically Reparameterized Light Fields & Fourier Slice Photography. Oliver Barth, 2009 Max Planck Institute Saarbrücken
 Dynamically Reparameterized Light Fields & Fourier Slice Photography Oliver Barth, 2009 Max Planck Institute Saarbrücken Background What we are talking about? 2 / 83 Background What we are talking about?
Dynamically Reparameterized Light Fields & Fourier Slice Photography Oliver Barth, 2009 Max Planck Institute Saarbrücken Background What we are talking about? 2 / 83 Background What we are talking about?
Image Enhancement in the Spatial Domain (Part 1)
") Image Enhancement in the Spatial Domain (Part 1) Lecturer: Dr. Hossam Hassan Email : hossameldin.hassan@eng.asu.edu.eg Computers and Systems Engineering Principle Objective of Enhancement Process an image
Image Enhancement in the Spatial Domain (Part 1) Lecturer: Dr. Hossam Hassan Email : hossameldin.hassan@eng.asu.edu.eg Computers and Systems Engineering Principle Objective of Enhancement Process an image
Double Aperture Camera for High Resolution Measurement
 Double Aperture Camera for High Resolution Measurement Venkatesh Bagaria, Nagesh AS and Varun AV* Siemens Corporate Technology, India *e-mail: varun.av@siemens.com Abstract In the domain of machine vision,
Double Aperture Camera for High Resolution Measurement Venkatesh Bagaria, Nagesh AS and Varun AV* Siemens Corporate Technology, India *e-mail: varun.av@siemens.com Abstract In the domain of machine vision,
Lecture 1: image display and representation
 Learning Objectives: General concepts of visual perception and continuous and discrete images Review concepts of sampling, convolution, spatial resolution, contrast resolution, and dynamic range through
Learning Objectives: General concepts of visual perception and continuous and discrete images Review concepts of sampling, convolution, spatial resolution, contrast resolution, and dynamic range through
Lecture 2 Digital Image Fundamentals. Lin ZHANG, PhD School of Software Engineering Tongji University Fall 2016
 Lecture 2 Digital Image Fundamentals Lin ZHANG, PhD School of Software Engineering Tongji University Fall 2016 Contents Elements of visual perception Light and the electromagnetic spectrum Image sensing
Lecture 2 Digital Image Fundamentals Lin ZHANG, PhD School of Software Engineering Tongji University Fall 2016 Contents Elements of visual perception Light and the electromagnetic spectrum Image sensing
Removing Temporal Stationary Blur in Route Panoramas
 Removing Temporal Stationary Blur in Route Panoramas Jiang Yu Zheng and Min Shi Indiana University Purdue University Indianapolis jzheng@cs.iupui.edu Abstract The Route Panorama is a continuous, compact
Removing Temporal Stationary Blur in Route Panoramas Jiang Yu Zheng and Min Shi Indiana University Purdue University Indianapolis jzheng@cs.iupui.edu Abstract The Route Panorama is a continuous, compact
According to the proposed AWB methods as described in Chapter 3, the following
 Chapter 4 Experiment 4.1 Introduction According to the proposed AWB methods as described in Chapter 3, the following experiments were designed to evaluate the feasibility and robustness of the algorithms.
Chapter 4 Experiment 4.1 Introduction According to the proposed AWB methods as described in Chapter 3, the following experiments were designed to evaluate the feasibility and robustness of the algorithms.
Chapters 1-3. Chapter 1: Introduction and applications of photogrammetry Chapter 2: Electro-magnetic radiation. Chapter 3: Basic optics
 Chapters 1-3 Chapter 1: Introduction and applications of photogrammetry Chapter 2: Electro-magnetic radiation Radiation sources Classification of remote sensing systems (passive & active) Electromagnetic
Chapters 1-3 Chapter 1: Introduction and applications of photogrammetry Chapter 2: Electro-magnetic radiation Radiation sources Classification of remote sensing systems (passive & active) Electromagnetic
IMAGE PROCESSING PAPER PRESENTATION ON IMAGE PROCESSING
 IMAGE PROCESSING PAPER PRESENTATION ON IMAGE PROCESSING PRESENTED BY S PRADEEP K SUNIL KUMAR III BTECH-II SEM, III BTECH-II SEM, C.S.E. C.S.E. pradeep585singana@gmail.com sunilkumar5b9@gmail.com CONTACT:
IMAGE PROCESSING PAPER PRESENTATION ON IMAGE PROCESSING PRESENTED BY S PRADEEP K SUNIL KUMAR III BTECH-II SEM, III BTECH-II SEM, C.S.E. C.S.E. pradeep585singana@gmail.com sunilkumar5b9@gmail.com CONTACT:
CSC 170 Introduction to Computers and Their Applications. Lecture #3 Digital Graphics and Video Basics. Bitmap Basics
 CSC 170 Introduction to Computers and Their Applications Lecture #3 Digital Graphics and Video Basics Bitmap Basics As digital devices gained the ability to display images, two types of computer graphics
CSC 170 Introduction to Computers and Their Applications Lecture #3 Digital Graphics and Video Basics Bitmap Basics As digital devices gained the ability to display images, two types of computer graphics
COLOR LASER PRINTER IDENTIFICATION USING PHOTOGRAPHED HALFTONE IMAGES. Do-Guk Kim, Heung-Kyu Lee
 COLOR LASER PRINTER IDENTIFICATION USING PHOTOGRAPHED HALFTONE IMAGES Do-Guk Kim, Heung-Kyu Lee Graduate School of Information Security, KAIST Department of Computer Science, KAIST ABSTRACT Due to the
COLOR LASER PRINTER IDENTIFICATION USING PHOTOGRAPHED HALFTONE IMAGES Do-Guk Kim, Heung-Kyu Lee Graduate School of Information Security, KAIST Department of Computer Science, KAIST ABSTRACT Due to the
ILLUMINATION AND IMAGE PROCESSING FOR REAL-TIME CONTROL OF DIRECTED ENERGY DEPOSITION ADDITIVE MANUFACTURING
 Solid Freeform Fabrication 2016: Proceedings of the 26th 27th Annual International Solid Freeform Fabrication Symposium An Additive Manufacturing Conference ILLUMINATION AND IMAGE PROCESSING FOR REAL-TIME
Solid Freeform Fabrication 2016: Proceedings of the 26th 27th Annual International Solid Freeform Fabrication Symposium An Additive Manufacturing Conference ILLUMINATION AND IMAGE PROCESSING FOR REAL-TIME
Images and Graphics. 4. Images and Graphics - Copyright Denis Hamelin - Ryerson University
 Images and Graphics Images and Graphics Graphics and images are non-textual information that can be displayed and printed. Graphics (vector graphics) are an assemblage of lines, curves or circles with
Images and Graphics Images and Graphics Graphics and images are non-textual information that can be displayed and printed. Graphics (vector graphics) are an assemblage of lines, curves or circles with
3D light microscopy techniques
 3D light microscopy techniques The image of a point is a 3D feature In-focus image Out-of-focus image The image of a point is not a point Point Spread Function (PSF) 1D imaging 2D imaging 3D imaging Resolution
3D light microscopy techniques The image of a point is a 3D feature In-focus image Out-of-focus image The image of a point is not a point Point Spread Function (PSF) 1D imaging 2D imaging 3D imaging Resolution
Multi Focus Structured Light for Recovering Scene Shape and Global Illumination
 Multi Focus Structured Light for Recovering Scene Shape and Global Illumination Supreeth Achar and Srinivasa G. Narasimhan Robotics Institute, Carnegie Mellon University Abstract. Illumination defocus
Multi Focus Structured Light for Recovering Scene Shape and Global Illumination Supreeth Achar and Srinivasa G. Narasimhan Robotics Institute, Carnegie Mellon University Abstract. Illumination defocus
Design of a Lens System for a Structured Light Projector
 University of Central Florida Retrospective Theses and Dissertations Masters Thesis (Open Access) Design of a Lens System for a Structured Light Projector 1987 Rick Joe Johnson University of Central Florida
University of Central Florida Retrospective Theses and Dissertations Masters Thesis (Open Access) Design of a Lens System for a Structured Light Projector 1987 Rick Joe Johnson University of Central Florida
LENSLESS IMAGING BY COMPRESSIVE SENSING
 LENSLESS IMAGING BY COMPRESSIVE SENSING Gang Huang, Hong Jiang, Kim Matthews and Paul Wilford Bell Labs, Alcatel-Lucent, Murray Hill, NJ 07974 ABSTRACT In this paper, we propose a lensless compressive
LENSLESS IMAGING BY COMPRESSIVE SENSING Gang Huang, Hong Jiang, Kim Matthews and Paul Wilford Bell Labs, Alcatel-Lucent, Murray Hill, NJ 07974 ABSTRACT In this paper, we propose a lensless compressive
Pixel-by-pixel absolute three-dimensional shape measurement with modified Fourier transform profilometry
 1472 Vol. 56, No. 5 / February 10 2017 / Applied Optics Research Article Pixel-by-pixel absolute three-dimensional shape measurement with modified Fourier transform profilometry HUITAEK YUN, BEIWEN LI,
1472 Vol. 56, No. 5 / February 10 2017 / Applied Optics Research Article Pixel-by-pixel absolute three-dimensional shape measurement with modified Fourier transform profilometry HUITAEK YUN, BEIWEN LI,
Close-Range Photogrammetry for Accident Reconstruction Measurements
 Close-Range Photogrammetry for Accident Reconstruction Measurements iwitness TM Close-Range Photogrammetry Software www.iwitnessphoto.com Lee DeChant Principal DeChant Consulting Services DCS Inc Bellevue,
Close-Range Photogrammetry for Accident Reconstruction Measurements iwitness TM Close-Range Photogrammetry Software www.iwitnessphoto.com Lee DeChant Principal DeChant Consulting Services DCS Inc Bellevue,
ME 6406 MACHINE VISION. Georgia Institute of Technology
 ME 6406 MACHINE VISION Georgia Institute of Technology Class Information Instructor Professor Kok-Meng Lee MARC 474 Office hours: Tues/Thurs 1:00-2:00 pm kokmeng.lee@me.gatech.edu (404)-894-7402 Class
ME 6406 MACHINE VISION Georgia Institute of Technology Class Information Instructor Professor Kok-Meng Lee MARC 474 Office hours: Tues/Thurs 1:00-2:00 pm kokmeng.lee@me.gatech.edu (404)-894-7402 Class
MEM: Intro to Robotics. Assignment 3I. Due: Wednesday 10/15 11:59 EST
 MEM: Intro to Robotics Assignment 3I Due: Wednesday 10/15 11:59 EST 1. Basic Optics You are shopping for a new lens for your Canon D30 digital camera and there are lots of lens options at the store. Your
MEM: Intro to Robotics Assignment 3I Due: Wednesday 10/15 11:59 EST 1. Basic Optics You are shopping for a new lens for your Canon D30 digital camera and there are lots of lens options at the store. Your
Nikon A1Rsi Confocal Start-Up Sequence
 1. Turn the key on the Nikon LUN-V Laser Launch. Nikon A1Rsi Confocal Start-Up Sequence 2. Press the button the left side of the A1Rsi Controller unit. 3. Turn on the power strip underneath the microscope.
1. Turn the key on the Nikon LUN-V Laser Launch. Nikon A1Rsi Confocal Start-Up Sequence 2. Press the button the left side of the A1Rsi Controller unit. 3. Turn on the power strip underneath the microscope.
ELECTRONIC HOLOGRAPHY
 ELECTRONIC HOLOGRAPHY CCD-camera replaces film as the recording medium. Electronic holography is better suited than film-based holography to quantitative applications including: - phase microscopy - metrology
ELECTRONIC HOLOGRAPHY CCD-camera replaces film as the recording medium. Electronic holography is better suited than film-based holography to quantitative applications including: - phase microscopy - metrology
Background Pixel Classification for Motion Detection in Video Image Sequences
 Background Pixel Classification for Motion Detection in Video Image Sequences P. Gil-Jiménez, S. Maldonado-Bascón, R. Gil-Pita, and H. Gómez-Moreno Dpto. de Teoría de la señal y Comunicaciones. Universidad
Background Pixel Classification for Motion Detection in Video Image Sequences P. Gil-Jiménez, S. Maldonado-Bascón, R. Gil-Pita, and H. Gómez-Moreno Dpto. de Teoría de la señal y Comunicaciones. Universidad
Image Forgery Detection Using Svm Classifier
 Image Forgery Detection Using Svm Classifier Anita Sahani 1, K.Srilatha 2 M.E. Student [Embedded System], Dept. Of E.C.E., Sathyabama University, Chennai, India 1 Assistant Professor, Dept. Of E.C.E, Sathyabama
Image Forgery Detection Using Svm Classifier Anita Sahani 1, K.Srilatha 2 M.E. Student [Embedded System], Dept. Of E.C.E., Sathyabama University, Chennai, India 1 Assistant Professor, Dept. Of E.C.E, Sathyabama
What is an image? Images and Displays. Representative display technologies. An image is:
 What is an image? Images and Displays A photographic print A photographic negative? This projection screen Some numbers in RAM? CS465 Lecture 2 2005 Steve Marschner 1 2005 Steve Marschner 2 An image is:
What is an image? Images and Displays A photographic print A photographic negative? This projection screen Some numbers in RAM? CS465 Lecture 2 2005 Steve Marschner 1 2005 Steve Marschner 2 An image is:
CS 465 Prelim 1. Tuesday 4 October hours. Problem 1: Image formats (18 pts)
") CS 465 Prelim 1 Tuesday 4 October 2005 1.5 hours Problem 1: Image formats (18 pts) 1. Give a common pixel data format that uses up the following numbers of bits per pixel: 8, 16, 32, 36. For instance,
CS 465 Prelim 1 Tuesday 4 October 2005 1.5 hours Problem 1: Image formats (18 pts) 1. Give a common pixel data format that uses up the following numbers of bits per pixel: 8, 16, 32, 36. For instance,
Outline for today. Geography 411/611 Remote sensing: Principles and Applications. Remote sensing: RS for biogeochemical cycles
 Geography 411/611 Remote sensing: Principles and Applications Thomas Albright, Associate Professor Laboratory for Conservation Biogeography, Department of Geography & Program in Ecology, Evolution, & Conservation
Geography 411/611 Remote sensing: Principles and Applications Thomas Albright, Associate Professor Laboratory for Conservation Biogeography, Department of Geography & Program in Ecology, Evolution, & Conservation
Advances in slabs defects inspection with Conoscopic Holography. Ignacio Alvarez, J.M. Enguita (UniOvi) J. Marina, R.
 J. Marina, R.") Advances in slabs defects inspection with Conoscopic Holography Ignacio Alvarez, J.M. Enguita (UniOvi) J. Marina, R. García (DSIplus) Advances in slabs defects inspection with C.H. Contents: Surface inspection
Advances in slabs defects inspection with Conoscopic Holography Ignacio Alvarez, J.M. Enguita (UniOvi) J. Marina, R. García (DSIplus) Advances in slabs defects inspection with C.H. Contents: Surface inspection
Manufacturing Metrology Team
 The Team has a range of state-of-the-art equipment for the measurement of surface texture and form. We are happy to discuss potential measurement issues and collaborative research Manufacturing Metrology
The Team has a range of state-of-the-art equipment for the measurement of surface texture and form. We are happy to discuss potential measurement issues and collaborative research Manufacturing Metrology
Leica ADS80 - Digital Airborne Imaging Solution NAIP, Salt Lake City 4 December 2008
 Luzern, Switzerland, acquired at 5 cm GSD, 2008. Leica ADS80 - Digital Airborne Imaging Solution NAIP, Salt Lake City 4 December 2008 Shawn Slade, Doug Flint and Ruedi Wagner Leica Geosystems AG, Airborne
Luzern, Switzerland, acquired at 5 cm GSD, 2008. Leica ADS80 - Digital Airborne Imaging Solution NAIP, Salt Lake City 4 December 2008 Shawn Slade, Doug Flint and Ruedi Wagner Leica Geosystems AG, Airborne
Introduction to Visual Perception & the EM Spectrum
 , Winter 2005 Digital Image Fundamentals: Visual Perception & the EM Spectrum, Image Acquisition, Sampling & Quantization Monday, September 19 2004 Overview (1): Review Some questions to consider Elements
, Winter 2005 Digital Image Fundamentals: Visual Perception & the EM Spectrum, Image Acquisition, Sampling & Quantization Monday, September 19 2004 Overview (1): Review Some questions to consider Elements
Review. Introduction to Visual Perception & the EM Spectrum. Overview (1):
:") Overview (1): Review Some questions to consider Winter 2005 Digital Image Fundamentals: Visual Perception & the EM Spectrum, Image Acquisition, Sampling & Quantization Tuesday, January 17 2006 Elements
Overview (1): Review Some questions to consider Winter 2005 Digital Image Fundamentals: Visual Perception & the EM Spectrum, Image Acquisition, Sampling & Quantization Tuesday, January 17 2006 Elements
Automatic Selection of Brackets for HDR Image Creation
 Automatic Selection of Brackets for HDR Image Creation Michel VIDAL-NAQUET, Wei MING Abstract High Dynamic Range imaging (HDR) is now readily available on mobile devices such as smart phones and compact
Automatic Selection of Brackets for HDR Image Creation Michel VIDAL-NAQUET, Wei MING Abstract High Dynamic Range imaging (HDR) is now readily available on mobile devices such as smart phones and compact
Feature Extraction Technique Based On Circular Strip for Palmprint Recognition
 Feature Extraction Technique Based On Circular Strip for Palmprint Recognition Dr.S.Valarmathy 1, R.Karthiprakash 2, C.Poonkuzhali 3 1, 2, 3 ECE Department, Bannari Amman Institute of Technology, Sathyamangalam
Feature Extraction Technique Based On Circular Strip for Palmprint Recognition Dr.S.Valarmathy 1, R.Karthiprakash 2, C.Poonkuzhali 3 1, 2, 3 ECE Department, Bannari Amman Institute of Technology, Sathyamangalam
SUPER RESOLUTION INTRODUCTION
 SUPER RESOLUTION Jnanavardhini - Online MultiDisciplinary Research Journal Ms. Amalorpavam.G Assistant Professor, Department of Computer Sciences, Sambhram Academy of Management. Studies, Bangalore Abstract:-
SUPER RESOLUTION Jnanavardhini - Online MultiDisciplinary Research Journal Ms. Amalorpavam.G Assistant Professor, Department of Computer Sciences, Sambhram Academy of Management. Studies, Bangalore Abstract:-
Image processing & Computer vision Xử lí ảnh và thị giác máy tính
 Image processing & Computer vision Xử lí ảnh và thị giác máy tính Color Alain Boucher - IFI Introduction To be able to see objects and a scene, we need light Otherwise, everything is black How does behave
Image processing & Computer vision Xử lí ảnh và thị giác máy tính Color Alain Boucher - IFI Introduction To be able to see objects and a scene, we need light Otherwise, everything is black How does behave
Leica - 3 rd Generation Airborne Digital Sensors Features / Benefits for Remote Sensing & Environmental Applications
 Leica - 3 rd Generation Airborne Digital Sensors Features / Benefits for Remote Sensing & Environmental Applications Arthur Rohrbach, Sensor Sales Dir Europe, Middle-East and Africa (EMEA) Luzern, Switzerland,
Leica - 3 rd Generation Airborne Digital Sensors Features / Benefits for Remote Sensing & Environmental Applications Arthur Rohrbach, Sensor Sales Dir Europe, Middle-East and Africa (EMEA) Luzern, Switzerland,
Criteria for Optical Systems: Optical Path Difference How do we determine the quality of a lens system? Several criteria used in optical design
 Criteria for Optical Systems: Optical Path Difference How do we determine the quality of a lens system? Several criteria used in optical design Computer Aided Design Several CAD tools use Ray Tracing (see
Criteria for Optical Systems: Optical Path Difference How do we determine the quality of a lens system? Several criteria used in optical design Computer Aided Design Several CAD tools use Ray Tracing (see
Images with (a) coding redundancy; (b) spatial redundancy; (c) irrelevant information
 coding redundancy; (b) spatial redundancy; (c) irrelevant information") Images with (a) coding redundancy; (b) spatial redundancy; (c) irrelevant information 1992 2008 R. C. Gonzalez & R. E. Woods For the image in Fig. 8.1(a): 1992 2008 R. C. Gonzalez & R. E. Woods Measuring
Images with (a) coding redundancy; (b) spatial redundancy; (c) irrelevant information 1992 2008 R. C. Gonzalez & R. E. Woods For the image in Fig. 8.1(a): 1992 2008 R. C. Gonzalez & R. E. Woods Measuring
CHAPTER 9 POSITION SENSITIVE PHOTOMULTIPLIER TUBES
 CHAPTER 9 POSITION SENSITIVE PHOTOMULTIPLIER TUBES The current multiplication mechanism offered by dynodes makes photomultiplier tubes ideal for low-light-level measurement. As explained earlier, there
CHAPTER 9 POSITION SENSITIVE PHOTOMULTIPLIER TUBES The current multiplication mechanism offered by dynodes makes photomultiplier tubes ideal for low-light-level measurement. As explained earlier, there
APPLICATION OF COMPUTER VISION FOR DETERMINATION OF SYMMETRICAL OBJECT POSITION IN THREE DIMENSIONAL SPACE
 APPLICATION OF COMPUTER VISION FOR DETERMINATION OF SYMMETRICAL OBJECT POSITION IN THREE DIMENSIONAL SPACE Najirah Umar 1 1 Jurusan Teknik Informatika, STMIK Handayani Makassar Email : najirah_stmikh@yahoo.com
APPLICATION OF COMPUTER VISION FOR DETERMINATION OF SYMMETRICAL OBJECT POSITION IN THREE DIMENSIONAL SPACE Najirah Umar 1 1 Jurusan Teknik Informatika, STMIK Handayani Makassar Email : najirah_stmikh@yahoo.com
Moving Object Detection for Intelligent Visual Surveillance
 Moving Object Detection for Intelligent Visual Surveillance Ph.D. Candidate: Jae Kyu Suhr Advisor : Prof. Jaihie Kim April 29, 2011 Contents 1 Motivation & Contributions 2 Background Compensation for PTZ
Moving Object Detection for Intelligent Visual Surveillance Ph.D. Candidate: Jae Kyu Suhr Advisor : Prof. Jaihie Kim April 29, 2011 Contents 1 Motivation & Contributions 2 Background Compensation for PTZ
Imaging Process (review)
") Color Used heavily in human vision Color is a pixel property, making some recognition problems easy Visible spectrum for humans is 400nm (blue) to 700 nm (red) Machines can see much more; ex. X-rays, infrared,
Color Used heavily in human vision Color is a pixel property, making some recognition problems easy Visible spectrum for humans is 400nm (blue) to 700 nm (red) Machines can see much more; ex. X-rays, infrared,
ALMALENCE SUPER SENSOR. A software component with an effect of increasing the pixel size and number of pixels in the sensor
 ALMALENCE SUPER SENSOR A software component with an effect of increasing the pixel size and number of pixels in the sensor MOBILE CAMERA: SMALL SENSOR AND TINY LENS Insufficient resolution, low light performance,
ALMALENCE SUPER SENSOR A software component with an effect of increasing the pixel size and number of pixels in the sensor MOBILE CAMERA: SMALL SENSOR AND TINY LENS Insufficient resolution, low light performance,
Active Stereo Vision. COMP 4102A Winter 2014 Gerhard Roth Version 1
 Active Stereo Vision COMP 4102A Winter 2014 Gerhard Roth Version 1 Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can
Active Stereo Vision COMP 4102A Winter 2014 Gerhard Roth Version 1 Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can
Face Detection using 3-D Time-of-Flight and Colour Cameras
 Face Detection using 3-D Time-of-Flight and Colour Cameras Jan Fischer, Daniel Seitz, Alexander Verl Fraunhofer IPA, Nobelstr. 12, 70597 Stuttgart, Germany Abstract This paper presents a novel method to
Face Detection using 3-D Time-of-Flight and Colour Cameras Jan Fischer, Daniel Seitz, Alexander Verl Fraunhofer IPA, Nobelstr. 12, 70597 Stuttgart, Germany Abstract This paper presents a novel method to
CR Basics and FAQ. Overview. Historical Perspective
 Page: 1 of 6 CR Basics and FAQ Overview Computed Radiography is a term used to describe a system that electronically records a radiographic image. Computed Radiographic systems use unique image receptors
Page: 1 of 6 CR Basics and FAQ Overview Computed Radiography is a term used to describe a system that electronically records a radiographic image. Computed Radiographic systems use unique image receptors
Advanced 3D Optical Profiler using Grasshopper3 USB3 Vision camera
 Advanced 3D Optical Profiler using Grasshopper3 USB3 Vision camera Figure 1. The Zeta-20 uses the Grasshopper3 and produces true color 3D optical images with multi mode optics technology 3D optical profiling
Advanced 3D Optical Profiler using Grasshopper3 USB3 Vision camera Figure 1. The Zeta-20 uses the Grasshopper3 and produces true color 3D optical images with multi mode optics technology 3D optical profiling
Digital Imaging CT & MR
 Digital Imaging CT & MR January 22, 2008 Digital Radiography, CT and MRI generate images in a digital format What is a Digital Image? A digital image is made up of picture elements, pixels row by column
Digital Imaging CT & MR January 22, 2008 Digital Radiography, CT and MRI generate images in a digital format What is a Digital Image? A digital image is made up of picture elements, pixels row by column
Physics 3340 Spring 2005
 Physics 3340 Spring 2005 Holography Purpose The goal of this experiment is to learn the basics of holography by making a two-beam transmission hologram. Introduction A conventional photograph registers
Physics 3340 Spring 2005 Holography Purpose The goal of this experiment is to learn the basics of holography by making a two-beam transmission hologram. Introduction A conventional photograph registers
Information & Instructions
 KEY FEATURES 1. USB 3.0 For the Fastest Transfer Rates Up to 10X faster than regular USB 2.0 connections (also USB 2.0 compatible) 2. High Resolution 4.2 MegaPixels resolution gives accurate profile measurements
KEY FEATURES 1. USB 3.0 For the Fastest Transfer Rates Up to 10X faster than regular USB 2.0 connections (also USB 2.0 compatible) 2. High Resolution 4.2 MegaPixels resolution gives accurate profile measurements
Student Attendance Monitoring System Via Face Detection and Recognition System
 IJSTE - International Journal of Science Technology & Engineering Volume 2 Issue 11 May 2016 ISSN (online): 2349-784X Student Attendance Monitoring System Via Face Detection and Recognition System Pinal
IJSTE - International Journal of Science Technology & Engineering Volume 2 Issue 11 May 2016 ISSN (online): 2349-784X Student Attendance Monitoring System Via Face Detection and Recognition System Pinal
Dark Field Technologies
 Dark Field Technologies High Speed Solid State Laser Inspection of Flexible Substrates AIMCAL Meeting 2012 Solid State Laser Reflection (SSLR) Technology for Clear and Reflective Webs Laser Scanners Pros
Dark Field Technologies High Speed Solid State Laser Inspection of Flexible Substrates AIMCAL Meeting 2012 Solid State Laser Reflection (SSLR) Technology for Clear and Reflective Webs Laser Scanners Pros
Sensing and Perception
 Unit D tion Exploring Robotics Spring, 2013 D.1 Why does a robot need sensors? the environment is complex the environment is dynamic enable the robot to learn about current conditions in its environment.
Unit D tion Exploring Robotics Spring, 2013 D.1 Why does a robot need sensors? the environment is complex the environment is dynamic enable the robot to learn about current conditions in its environment.
Development of an Education System for Surface Mount Work of a Printed Circuit Board
 Development of an Education System for Surface Mount Work of a Printed Circuit Board H. Ishii, T. Kobayashi, H. Fujino, Y. Nishimura, H. Shimoda, H. Yoshikawa Kyoto University Gokasho, Uji, Kyoto, 611-0011,
Development of an Education System for Surface Mount Work of a Printed Circuit Board H. Ishii, T. Kobayashi, H. Fujino, Y. Nishimura, H. Shimoda, H. Yoshikawa Kyoto University Gokasho, Uji, Kyoto, 611-0011,
IBEX MATERIALS DETECTION TECHNOLOGY
 WHITE PAPER: IBEX MATERIALS DETECTION TECHNOLOGY IBEX Innovations Ltd. Registered in England and Wales: 07208355 Address: Discovery 2, NETPark, William Armstrong Way, Sedgefield, TS21 3FH, UK Patents held
WHITE PAPER: IBEX MATERIALS DETECTION TECHNOLOGY IBEX Innovations Ltd. Registered in England and Wales: 07208355 Address: Discovery 2, NETPark, William Armstrong Way, Sedgefield, TS21 3FH, UK Patents held
DIGITAL RADIOGRAPHY. Digital radiography is a film-less technology used to record radiographic images.
 DIGITAL RADIOGRAPHY Digital radiography is a film-less technology used to record radiographic images. 1 The purpose of digital imaging is to generate images that can be used in the diagnosis and assessment
DIGITAL RADIOGRAPHY Digital radiography is a film-less technology used to record radiographic images. 1 The purpose of digital imaging is to generate images that can be used in the diagnosis and assessment
APPLICATIONS FOR TELECENTRIC LIGHTING
 APPLICATIONS FOR TELECENTRIC LIGHTING Telecentric lenses used in combination with telecentric lighting provide the most accurate results for measurement of object shapes and geometries. They make attributes
APPLICATIONS FOR TELECENTRIC LIGHTING Telecentric lenses used in combination with telecentric lighting provide the most accurate results for measurement of object shapes and geometries. They make attributes
EC-433 Digital Image Processing
 EC-433 Digital Image Processing Lecture 2 Digital Image Fundamentals Dr. Arslan Shaukat 1 Fundamental Steps in DIP Image Acquisition An image is captured by a sensor (such as a monochrome or color TV camera)
EC-433 Digital Image Processing Lecture 2 Digital Image Fundamentals Dr. Arslan Shaukat 1 Fundamental Steps in DIP Image Acquisition An image is captured by a sensor (such as a monochrome or color TV camera)
Single-photon excitation of morphology dependent resonance
 Single-photon excitation of morphology dependent resonance 3.1 Introduction The examination of morphology dependent resonance (MDR) has been of considerable importance to many fields in optical science.
Single-photon excitation of morphology dependent resonance 3.1 Introduction The examination of morphology dependent resonance (MDR) has been of considerable importance to many fields in optical science.
CS354 Computer Graphics Computational Photography. Qixing Huang April 23 th 2018
 CS354 Computer Graphics Computational Photography Qixing Huang April 23 th 2018 Background Sales of digital cameras surpassed sales of film cameras in 2004 Digital Cameras Free film Instant display Quality
CS354 Computer Graphics Computational Photography Qixing Huang April 23 th 2018 Background Sales of digital cameras surpassed sales of film cameras in 2004 Digital Cameras Free film Instant display Quality
Bar Code Labels. Introduction
 Introduction to Bar Code Reading Technology Introduction Most people are familiar with bar codes. These are the bands of stripe lines which can be found on many grocery items and are used by scanning devices
Introduction to Bar Code Reading Technology Introduction Most people are familiar with bar codes. These are the bands of stripe lines which can be found on many grocery items and are used by scanning devices
Image and Video Processing
 Image and Video Processing () Image Representation Dr. Miles Hansard miles.hansard@qmul.ac.uk Segmentation 2 Today s agenda Digital image representation Sampling Quantization Sub-sampling Pixel interpolation
Image and Video Processing () Image Representation Dr. Miles Hansard miles.hansard@qmul.ac.uk Segmentation 2 Today s agenda Digital image representation Sampling Quantization Sub-sampling Pixel interpolation
The Necessary Resolution to Zoom and Crop Hardcopy Images
 The Necessary Resolution to Zoom and Crop Hardcopy Images Cathleen M. Daniels, Raymond W. Ptucha, and Laurie Schaefer Eastman Kodak Company, Rochester, New York, USA Abstract The objective of this study
The Necessary Resolution to Zoom and Crop Hardcopy Images Cathleen M. Daniels, Raymond W. Ptucha, and Laurie Schaefer Eastman Kodak Company, Rochester, New York, USA Abstract The objective of this study
Computational Illumination
 MAS.963: Computational Camera and Photography Fall 2009 Computational Illumination Prof. Ramesh Raskar October 2, 2009 October 2, 2009 Scribe: Anonymous MIT student Lecture 4 Poll: When will Google Earth
MAS.963: Computational Camera and Photography Fall 2009 Computational Illumination Prof. Ramesh Raskar October 2, 2009 October 2, 2009 Scribe: Anonymous MIT student Lecture 4 Poll: When will Google Earth
Deblurring. Basics, Problem definition and variants
 Deblurring Basics, Problem definition and variants Kinds of blur Hand-shake Defocus Credit: Kenneth Josephson Motion Credit: Kenneth Josephson Kinds of blur Spatially invariant vs. Spatially varying
Deblurring Basics, Problem definition and variants Kinds of blur Hand-shake Defocus Credit: Kenneth Josephson Motion Credit: Kenneth Josephson Kinds of blur Spatially invariant vs. Spatially varying
TSBB09 Image Sensors 2018-HT2. Image Formation Part 1
 TSBB09 Image Sensors 2018-HT2 Image Formation Part 1 Basic physics Electromagnetic radiation consists of electromagnetic waves With energy That propagate through space The waves consist of transversal
TSBB09 Image Sensors 2018-HT2 Image Formation Part 1 Basic physics Electromagnetic radiation consists of electromagnetic waves With energy That propagate through space The waves consist of transversal
Technical Benefits of the
 innovation in microvascular assessment Technical Benefits of the Moor Instruments moorflpi-2 moorflpi-2 More Info: Measurement Principle laser speckle contrast analysis Measurement 85nm Laser Wavelength
innovation in microvascular assessment Technical Benefits of the Moor Instruments moorflpi-2 moorflpi-2 More Info: Measurement Principle laser speckle contrast analysis Measurement 85nm Laser Wavelength
Non-contact Photoacoustic Tomography using holographic full field detection
 Non-contact Photoacoustic Tomography using holographic full field detection Jens Horstmann* a, Ralf Brinkmann a,b a Medical Laser Center Lübeck, Peter-Monnik-Weg 4, 23562 Lübeck, Germany; b Institute of
Non-contact Photoacoustic Tomography using holographic full field detection Jens Horstmann* a, Ralf Brinkmann a,b a Medical Laser Center Lübeck, Peter-Monnik-Weg 4, 23562 Lübeck, Germany; b Institute of