Wavefront coding. Refocusing & Light Fields. Wavefront coding. Final projects. Is depth of field a blur? Frédo Durand Bill Freeman MIT - EECS
|
|
|
- Coleen Bradley
- 6 years ago
- Views:
Transcription

 From Macro Photography Wavefront coding CDM-Optics, U of Colorado, Boulder The worst title ever: \"A New Paradigm for Imaging Systems\", Cathey and Dowski, Appl.")

1 6.098 Digital and Computational Photography Advanced Computational Photography Final projects Send your slides by noon on Thrusday. Send final report Refocusing & Light Fields Frédo Durand Bill Freeman MIT - EECS Wavefront coding Is depth of field a blur? Depth of field is NOT a convolution of the image The circle of confusion varies with depth There are interesting occlusion effects (If you really want a convolution, there is one, but in 4D space more soon) From Macro Photography Wavefront coding CDM-Optics, U of Colorado, Boulder The worst title ever: "A New Paradigm for Imaging Systems", Cathey and Dowski, Appl. Optics, 2002 Improve depth of field using weird optics & deconvolution Wavefront coding Idea: deconvolution to deblur out of focus regions Convolution = filter (e.g. blur, sharpen) Sometimes, we can cancel a convolution by another convolution Like apply sharpen after blur (kind of) This is called deconvolution Best studied in the Fourier domain (of course!) Convolution = multiplication of spectra Deconvolution = multiplication by inverse spectrum 1
=0 Numerically unstable when K(ω) is small Wavefront coding Idea:")


 Pretty much bends light Will do things")
2 Deconvolution Assume we know blurring kernel k f' = f k F' = F K (in Fourier space) Invert by: F=F'/K (in Fourier space) Well-known problem with deconvolution: Impossible to invert for ω where K(ω)=0 Numerically unstable when K(ω) is small Wavefront coding Idea: deconvolution to deblur out of focus regions Problem 1: depth of field blur is not shift-invariant Depends on depth If depth of field is not a convolution, it's harder to use deconvolution ;-( Problem 2: Depth of field blur "kills information" Fourier transform of blurring kernel has lots of zeros Deconvolution is ill-posed Wavefront coding Ray version Idea: deconvolution to deblur out of focus regions Problem 1: depth of field blur is not shift-invariant Problem 2: Depth of field blur "kills information" Solution: change optical system so that Rays don't converge anymore Image blur is the same for all depth Blur spectrum does not have too many zeros How it's done Phase plate (wave optics effect, diffraction) Pretty much bends light Will do things similar to spherical aberrations 2



")



3 Other application Single-image depth sensing Blur depends A LOT on depth Passive Ranging Through Wave-Front Coding: Information and Application. Johnson, Dowski, Cathey Single image depth sensing Important take-home idea Coded imaging What the sensor records is not the image we want, it's been coded (kind of like in cryptography) Image processing decodes it Other forms of coded imaging Tomography e.g. aphy Lots of cool Fourier transforms there X-ray telescopes & coded aperture e.g. Ramesh's motion blur and to some extend, Bayer mosaics See Berthold Horn's course Plenoptic camera refocusing 3

 all the possible images around us?")
![The Plenoptic function [Adelson & Bergen 91] http://web.mit.](/docs-images/79/79196907/images/4-2.jpg "edu/pe rsci/people/adelson/pu b_pdfs/elements91.")

4 Plenoptic/light field cameras Lipmann 1908 "Window to the world" Adelson and Wang, 1992 Depth computation Revisited by Ng et al. for refocusing The Plenoptic Function Back to the images that surround us How to describe (and capture) all the possible images around us? The Plenoptic function [Adelson & Bergen 91] rsci/people/adelson/pu b_pdfs/elements91.pd f From the greek "total" See also g2.com/index.pl?node _id=989303&lastnode _id= Plenoptic function 3D for viewpoint 2D for ray direction 1D for wavelength 1D for time Light fields can add polarization From McMillan 95 4

5 Idea Reduce to outside the convex hull of a scene For every line in space Store RGB radiance How many dimensions for 3D lines? 4: e.g. 2 for direction, 2 for intersection with plane Then rendering is just a lookup Two major publication in 1996: Light field rendering [Levoy & Hanrahan] The Lumigraph [Gortler et al.] Adds some depth information Two-plane parameterization Line parameterized by intersection with 2 planes Careful, there are different "isotopes" of such parameterization (slightly different meaning of stuv) Let's make life simpler: 2D How many dimensions for 2D lines? Only 2, e.g. y=ax+b <> (a,b) Let's make life simpler: 2D 2-line parameterization View? 5



6 View? View line in Ray space Kind of cool: ray point, and view around point line There is a duality Back to 3D/4D From Gortler et al. Cool visualization From Gortler et al. View = 2D plane in 4D With various resampling issues Demo light field viewer 6



![03] Light field spectrum as a function of object distance Slope inversely](/docs-images/79/79196907/images/7-3.jpg "proportional to depth http://graphics.cs.cmu.")
7 Reconstruction, antialiasing, depth of field Slide by Marc Levoy Aperture reconstruction So far, we have talked about pinhole view Aperture reconstruction: depth of field, better antiliasing Small aperture Slide by Marc Levoy Image Isaksen et al. Big aperture Light field sampling [Chai et al. 00, Isaksen et al. 00, Stewart et al. 03] Light field spectrum as a function of object distance Slope inversely proportional to depth Image Isaksen et al. From [Chai et al. 2000] 7




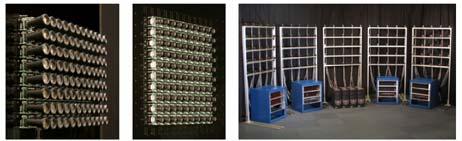

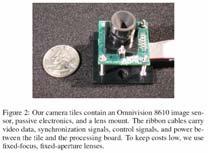
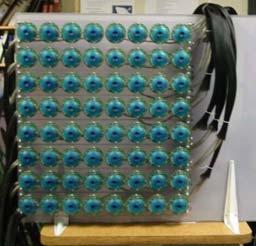
8 Light field cameras Plenoptic camera For depth extraction Adelson & Wang 92 Camera array Willburn et al. Camera arrays MIT version Jason Yang 8





9 Bullet time Time splice Robotic Camera Image Leonard McMillan Image Levoy et al. Flatbed scanner camera By Jason Yang Plenoptic camera refocusing Conventional Photograph Light Field Photography Capture the light field inside the camera body 9











10 Hand-Held Light Field Camera Medium format digital camera Camera in-use 16 megapixel sensor Microlens array Light Field in a Single Exposure Light Field in a Single Exposure Light Field Inside the Camera Body Digital Refocusing 10

11 Digital Refocusing Digitally stopping-down Σ stopping down = summing only the central portion of each microlens Σ Digital Refocusing by Ray-Tracing Digital Refocusing by Ray-Tracing u x u x Imaginary film Lens Sensor Lens Sensor Digital Refocusing by Ray-Tracing Digital Refocusing by Ray-Tracing u x u x Imaginary film Imaginary film Lens Sensor Lens Sensor 11
 lens In our prototype camera Lens is f /4 12 x 12 pixels under each microlens Theoretically refocus within depth of")
12 Digital Refocusing by Ray-Tracing u x Imaginary film Lens Sensor Results of Band-Limited Analysis Assume a light field camera with An f /A lens N x N pixels under each microlens Show result video From its light fields we can Refocus exactly within depth of field of an f /(A N) lens In our prototype camera Lens is f /4 12 x 12 pixels under each microlens Theoretically refocus within depth of field of an f/48 lens Automultiscopic displays 3D displays With Matthias, Wojciech & Hans View-dependent pixels Lenticular optics (microlenses) Barrier 12





13 Lenticular optics Application 3D screens are shipping! Figure by Isaksen et al. Light Field Microscopy Light field microscopy 13


14 Show video Conclusions Computational Photography Slide by Ramesh Generalized Sensor Novel Cameras Light Sources Modulators Generalized Optics Processing Generalized Optics Ray 4D Ray Bender Reconstruction Upto 4D Ray Sampler Programmable 4D 4D Illumination field field + Time Time + Wavelength 4D Light Field Display Recreate 4D Lightfield Scene: 8D Ray Modulator 14
Admin. Lightfields. Overview. Overview 5/13/2008. Idea. Projects due by the end of today. Lecture 13. Lightfield representation of a scene
 Admin Lightfields Projects due by the end of today Email me source code, result images and short report Lecture 13 Overview Lightfield representation of a scene Unified representation of all rays Overview
Admin Lightfields Projects due by the end of today Email me source code, result images and short report Lecture 13 Overview Lightfield representation of a scene Unified representation of all rays Overview
Coded photography , , Computational Photography Fall 2018, Lecture 14
 Coded photography http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 14 Overview of today s lecture The coded photography paradigm. Dealing with
Coded photography http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 14 Overview of today s lecture The coded photography paradigm. Dealing with
Coded photography , , Computational Photography Fall 2017, Lecture 18
 Coded photography http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 18 Course announcements Homework 5 delayed for Tuesday. - You will need cameras
Coded photography http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 18 Course announcements Homework 5 delayed for Tuesday. - You will need cameras
Dappled Photography: Mask Enhanced Cameras for Heterodyned Light Fields and Coded Aperture Refocusing
 Dappled Photography: Mask Enhanced Cameras for Heterodyned Light Fields and Coded Aperture Refocusing Ashok Veeraraghavan, Ramesh Raskar, Ankit Mohan & Jack Tumblin Amit Agrawal, Mitsubishi Electric Research
Dappled Photography: Mask Enhanced Cameras for Heterodyned Light Fields and Coded Aperture Refocusing Ashok Veeraraghavan, Ramesh Raskar, Ankit Mohan & Jack Tumblin Amit Agrawal, Mitsubishi Electric Research
Computational Approaches to Cameras
 Computational Approaches to Cameras 11/16/17 Magritte, The False Mirror (1935) Computational Photography Derek Hoiem, University of Illinois Announcements Final project proposal due Monday (see links on
Computational Approaches to Cameras 11/16/17 Magritte, The False Mirror (1935) Computational Photography Derek Hoiem, University of Illinois Announcements Final project proposal due Monday (see links on
Lecture 18: Light field cameras. (plenoptic cameras) Visual Computing Systems CMU , Fall 2013
 Visual Computing Systems CMU , Fall 2013") Lecture 18: Light field cameras (plenoptic cameras) Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today:
Lecture 18: Light field cameras (plenoptic cameras) Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today:
Computational Cameras. Rahul Raguram COMP
 Computational Cameras Rahul Raguram COMP 790-090 What is a computational camera? Camera optics Camera sensor 3D scene Traditional camera Final image Modified optics Camera sensor Image Compute 3D scene
Computational Cameras Rahul Raguram COMP 790-090 What is a computational camera? Camera optics Camera sensor 3D scene Traditional camera Final image Modified optics Camera sensor Image Compute 3D scene
Coded Computational Photography!
 Coded Computational Photography! EE367/CS448I: Computational Imaging and Display! stanford.edu/class/ee367! Lecture 9! Gordon Wetzstein! Stanford University! Coded Computational Photography - Overview!!
Coded Computational Photography! EE367/CS448I: Computational Imaging and Display! stanford.edu/class/ee367! Lecture 9! Gordon Wetzstein! Stanford University! Coded Computational Photography - Overview!!
Capturing Light. The Light Field. Grayscale Snapshot 12/1/16. P(q, f)
") Capturing Light Rooms by the Sea, Edward Hopper, 1951 The Penitent Magdalen, Georges de La Tour, c. 1640 Some slides from M. Agrawala, F. Durand, P. Debevec, A. Efros, R. Fergus, D. Forsyth, M. Levoy,
Capturing Light Rooms by the Sea, Edward Hopper, 1951 The Penitent Magdalen, Georges de La Tour, c. 1640 Some slides from M. Agrawala, F. Durand, P. Debevec, A. Efros, R. Fergus, D. Forsyth, M. Levoy,
To Do. Advanced Computer Graphics. Outline. Computational Imaging. How do we see the world? Pinhole camera
 Advanced Computer Graphics CSE 163 [Spring 2017], Lecture 14 Ravi Ramamoorthi http://www.cs.ucsd.edu/~ravir To Do Assignment 2 due May 19 Any last minute issues or questions? Next two lectures: Imaging,
Advanced Computer Graphics CSE 163 [Spring 2017], Lecture 14 Ravi Ramamoorthi http://www.cs.ucsd.edu/~ravir To Do Assignment 2 due May 19 Any last minute issues or questions? Next two lectures: Imaging,
Light field sensing. Marc Levoy. Computer Science Department Stanford University
 Light field sensing Marc Levoy Computer Science Department Stanford University The scalar light field (in geometrical optics) Radiance as a function of position and direction in a static scene with fixed
Light field sensing Marc Levoy Computer Science Department Stanford University The scalar light field (in geometrical optics) Radiance as a function of position and direction in a static scene with fixed
Coding and Modulation in Cameras
 Coding and Modulation in Cameras Amit Agrawal June 2010 Mitsubishi Electric Research Labs (MERL) Cambridge, MA, USA Coded Computational Imaging Agrawal, Veeraraghavan, Narasimhan & Mohan Schedule Introduction
Coding and Modulation in Cameras Amit Agrawal June 2010 Mitsubishi Electric Research Labs (MERL) Cambridge, MA, USA Coded Computational Imaging Agrawal, Veeraraghavan, Narasimhan & Mohan Schedule Introduction
The ultimate camera. Computational Photography. Creating the ultimate camera. The ultimate camera. What does it do?
 Computational Photography The ultimate camera What does it do? Image from Durand & Freeman s MIT Course on Computational Photography Today s reading Szeliski Chapter 9 The ultimate camera Infinite resolution
Computational Photography The ultimate camera What does it do? Image from Durand & Freeman s MIT Course on Computational Photography Today s reading Szeliski Chapter 9 The ultimate camera Infinite resolution
 Project 4 Results http://www.cs.brown.edu/courses/cs129/results/proj4/jcmace/ http://www.cs.brown.edu/courses/cs129/results/proj4/damoreno/ http://www.cs.brown.edu/courses/csci1290/results/proj4/huag/
Project 4 Results http://www.cs.brown.edu/courses/cs129/results/proj4/jcmace/ http://www.cs.brown.edu/courses/cs129/results/proj4/damoreno/ http://www.cs.brown.edu/courses/csci1290/results/proj4/huag/
Full Resolution Lightfield Rendering
 Full Resolution Lightfield Rendering Andrew Lumsdaine Indiana University lums@cs.indiana.edu Todor Georgiev Adobe Systems tgeorgie@adobe.com Figure 1: Example of lightfield, normally rendered image, and
Full Resolution Lightfield Rendering Andrew Lumsdaine Indiana University lums@cs.indiana.edu Todor Georgiev Adobe Systems tgeorgie@adobe.com Figure 1: Example of lightfield, normally rendered image, and
Computational Photography: Principles and Practice
 Computational Photography: Principles and Practice HCI & Robotics (HCI 및로봇응용공학 ) Ig-Jae Kim, Korea Institute of Science and Technology ( 한국과학기술연구원김익재 ) Jaewon Kim, Korea Institute of Science and Technology
Computational Photography: Principles and Practice HCI & Robotics (HCI 및로봇응용공학 ) Ig-Jae Kim, Korea Institute of Science and Technology ( 한국과학기술연구원김익재 ) Jaewon Kim, Korea Institute of Science and Technology
Light field photography and microscopy
 Light field photography and microscopy Marc Levoy Computer Science Department Stanford University The light field (in geometrical optics) Radiance as a function of position and direction in a static scene
Light field photography and microscopy Marc Levoy Computer Science Department Stanford University The light field (in geometrical optics) Radiance as a function of position and direction in a static scene
Dynamically Reparameterized Light Fields & Fourier Slice Photography. Oliver Barth, 2009 Max Planck Institute Saarbrücken
 Dynamically Reparameterized Light Fields & Fourier Slice Photography Oliver Barth, 2009 Max Planck Institute Saarbrücken Background What we are talking about? 2 / 83 Background What we are talking about?
Dynamically Reparameterized Light Fields & Fourier Slice Photography Oliver Barth, 2009 Max Planck Institute Saarbrücken Background What we are talking about? 2 / 83 Background What we are talking about?
Lenses, exposure, and (de)focus
focus") Lenses, exposure, and (de)focus http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 15 Course announcements Homework 4 is out. - Due October 26
Lenses, exposure, and (de)focus http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 15 Course announcements Homework 4 is out. - Due October 26
Introduction to Light Fields
 MIT Media Lab Introduction to Light Fields Camera Culture Ramesh Raskar MIT Media Lab http://cameraculture.media.mit.edu/ Introduction to Light Fields Ray Concepts for 4D and 5D Functions Propagation of
MIT Media Lab Introduction to Light Fields Camera Culture Ramesh Raskar MIT Media Lab http://cameraculture.media.mit.edu/ Introduction to Light Fields Ray Concepts for 4D and 5D Functions Propagation of
Light-Field Database Creation and Depth Estimation
 Light-Field Database Creation and Depth Estimation Abhilash Sunder Raj abhisr@stanford.edu Michael Lowney mlowney@stanford.edu Raj Shah shahraj@stanford.edu Abstract Light-field imaging research has been
Light-Field Database Creation and Depth Estimation Abhilash Sunder Raj abhisr@stanford.edu Michael Lowney mlowney@stanford.edu Raj Shah shahraj@stanford.edu Abstract Light-field imaging research has been
Deconvolution , , Computational Photography Fall 2018, Lecture 12
 Deconvolution http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 12 Course announcements Homework 3 is out. - Due October 12 th. - Any questions?
Deconvolution http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 12 Course announcements Homework 3 is out. - Due October 12 th. - Any questions?
Coded Aperture and Coded Exposure Photography
 Coded Aperture and Coded Exposure Photography Martin Wilson University of Cape Town Cape Town, South Africa Email: Martin.Wilson@uct.ac.za Fred Nicolls University of Cape Town Cape Town, South Africa Email:
Coded Aperture and Coded Exposure Photography Martin Wilson University of Cape Town Cape Town, South Africa Email: Martin.Wilson@uct.ac.za Fred Nicolls University of Cape Town Cape Town, South Africa Email:
Deconvolution , , Computational Photography Fall 2017, Lecture 17
 Deconvolution http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 17 Course announcements Homework 4 is out. - Due October 26 th. - There was another
Deconvolution http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 17 Course announcements Homework 4 is out. - Due October 26 th. - There was another
Lecture 22: Cameras & Lenses III. Computer Graphics and Imaging UC Berkeley CS184/284A, Spring 2017
 Lecture 22: Cameras & Lenses III Computer Graphics and Imaging UC Berkeley, Spring 2017 F-Number For Lens vs. Photo A lens s F-Number is the maximum for that lens E.g. 50 mm F/1.4 is a high-quality telephoto
Lecture 22: Cameras & Lenses III Computer Graphics and Imaging UC Berkeley, Spring 2017 F-Number For Lens vs. Photo A lens s F-Number is the maximum for that lens E.g. 50 mm F/1.4 is a high-quality telephoto
Lecture 21: Cameras & Lenses II. Computer Graphics and Imaging UC Berkeley CS184/284A
 Lecture 21: Cameras & Lenses II Computer Graphics and Imaging UC Berkeley Real Lens Designs Are Highly Complex [Apple] Topic o next lecture Real Lens Elements Are Not Ideal Aberrations Real plano-convex
Lecture 21: Cameras & Lenses II Computer Graphics and Imaging UC Berkeley Real Lens Designs Are Highly Complex [Apple] Topic o next lecture Real Lens Elements Are Not Ideal Aberrations Real plano-convex
Single-shot three-dimensional imaging of dilute atomic clouds
 Calhoun: The NPS Institutional Archive Faculty and Researcher Publications Funded by Naval Postgraduate School 2014 Single-shot three-dimensional imaging of dilute atomic clouds Sakmann, Kaspar http://hdl.handle.net/10945/52399
Calhoun: The NPS Institutional Archive Faculty and Researcher Publications Funded by Naval Postgraduate School 2014 Single-shot three-dimensional imaging of dilute atomic clouds Sakmann, Kaspar http://hdl.handle.net/10945/52399
Computational Camera & Photography: Coded Imaging
 Computational Camera & Photography: Coded Imaging Camera Culture Ramesh Raskar MIT Media Lab http://cameraculture.media.mit.edu/ Image removed due to copyright restrictions. See Fig. 1, Eight major types
Computational Camera & Photography: Coded Imaging Camera Culture Ramesh Raskar MIT Media Lab http://cameraculture.media.mit.edu/ Image removed due to copyright restrictions. See Fig. 1, Eight major types
Less Is More: Coded Computational Photography
 Less Is More: Coded Computational Photography Ramesh Raskar Mitsubishi Electric Research Labs (MERL), Cambridge, MA, USA Abstract. Computational photography combines plentiful computing, digital sensors,
Less Is More: Coded Computational Photography Ramesh Raskar Mitsubishi Electric Research Labs (MERL), Cambridge, MA, USA Abstract. Computational photography combines plentiful computing, digital sensors,
Point Spread Function Engineering for Scene Recovery. Changyin Zhou
 Point Spread Function Engineering for Scene Recovery Changyin Zhou Submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy in the Graduate School of Arts and Sciences
Point Spread Function Engineering for Scene Recovery Changyin Zhou Submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy in the Graduate School of Arts and Sciences
Cameras. Shrinking the aperture. Camera trial #1. Pinhole camera. Digital Visual Effects Yung-Yu Chuang. Put a piece of film in front of an object.
 Camera trial #1 Cameras Digital Visual Effects Yung-Yu Chuang scene film with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros Put a piece of film in front of an object. Pinhole camera
Camera trial #1 Cameras Digital Visual Effects Yung-Yu Chuang scene film with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros Put a piece of film in front of an object. Pinhole camera
Computational Photography: Advanced Topics
 Computational Photography: Advanced Topics Courtsey: : Jack Tumblin, Northwestern University Focus, Click, Print: Film-Like Photography Light + 3D Scene: Illumination, shape, movement, surface BRDF, Rays
Computational Photography: Advanced Topics Courtsey: : Jack Tumblin, Northwestern University Focus, Click, Print: Film-Like Photography Light + 3D Scene: Illumination, shape, movement, surface BRDF, Rays
Image Formation and Camera Design
 Image Formation and Camera Design Spring 2003 CMSC 426 Jan Neumann 2/20/03 Light is all around us! From London & Upton, Photography Conventional camera design... Ken Kay, 1969 in Light & Film, TimeLife
Image Formation and Camera Design Spring 2003 CMSC 426 Jan Neumann 2/20/03 Light is all around us! From London & Upton, Photography Conventional camera design... Ken Kay, 1969 in Light & Film, TimeLife
Near-Invariant Blur for Depth and 2D Motion via Time-Varying Light Field Analysis
 Near-Invariant Blur for Depth and 2D Motion via Time-Varying Light Field Analysis Yosuke Bando 1,2 Henry Holtzman 2 Ramesh Raskar 2 1 Toshiba Corporation 2 MIT Media Lab Defocus & Motion Blur PSF Depth
Near-Invariant Blur for Depth and 2D Motion via Time-Varying Light Field Analysis Yosuke Bando 1,2 Henry Holtzman 2 Ramesh Raskar 2 1 Toshiba Corporation 2 MIT Media Lab Defocus & Motion Blur PSF Depth
Building a Real Camera. Slides Credit: Svetlana Lazebnik
 Building a Real Camera Slides Credit: Svetlana Lazebnik Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible?
Building a Real Camera Slides Credit: Svetlana Lazebnik Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible?
Computational Photography and Video. Prof. Marc Pollefeys
 Computational Photography and Video Prof. Marc Pollefeys Today s schedule Introduction of Computational Photography Course facts Syllabus Digital Photography What is computational photography Convergence
Computational Photography and Video Prof. Marc Pollefeys Today s schedule Introduction of Computational Photography Course facts Syllabus Digital Photography What is computational photography Convergence
6.098 Digital and Computational Photography Advanced Computational Photography. Bill Freeman Frédo Durand MIT - EECS
 6.098 Digital and Computational Photography 6.882 Advanced Computational Photography Bill Freeman Frédo Durand MIT - EECS Administrivia PSet 1 is out Due Thursday February 23 Digital SLR initiation? During
6.098 Digital and Computational Photography 6.882 Advanced Computational Photography Bill Freeman Frédo Durand MIT - EECS Administrivia PSet 1 is out Due Thursday February 23 Digital SLR initiation? During
Cameras. Digital Visual Effects, Spring 2008 Yung-Yu Chuang 2008/2/26. with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros
 Cameras Digital Visual Effects, Spring 2008 Yung-Yu Chuang 2008/2/26 with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros Camera trial #1 scene film Put a piece of film in front of
Cameras Digital Visual Effects, Spring 2008 Yung-Yu Chuang 2008/2/26 with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros Camera trial #1 scene film Put a piece of film in front of
Chapter 18 Optical Elements
 Chapter 18 Optical Elements GOALS When you have mastered the content of this chapter, you will be able to achieve the following goals: Definitions Define each of the following terms and use it in an operational
Chapter 18 Optical Elements GOALS When you have mastered the content of this chapter, you will be able to achieve the following goals: Definitions Define each of the following terms and use it in an operational
Computational Photography
 Computational photography Computational Photography Digital Visual Effects Yung-Yu Chuang wikipedia: Computational photography h refers broadly to computational imaging techniques that enhance or extend
Computational photography Computational Photography Digital Visual Effects Yung-Yu Chuang wikipedia: Computational photography h refers broadly to computational imaging techniques that enhance or extend
Transfer Efficiency and Depth Invariance in Computational Cameras
 Transfer Efficiency and Depth Invariance in Computational Cameras Jongmin Baek Stanford University IEEE International Conference on Computational Photography 2010 Jongmin Baek (Stanford University) Transfer
Transfer Efficiency and Depth Invariance in Computational Cameras Jongmin Baek Stanford University IEEE International Conference on Computational Photography 2010 Jongmin Baek (Stanford University) Transfer
Deblurring. Basics, Problem definition and variants
 Deblurring Basics, Problem definition and variants Kinds of blur Hand-shake Defocus Credit: Kenneth Josephson Motion Credit: Kenneth Josephson Kinds of blur Spatially invariant vs. Spatially varying
Deblurring Basics, Problem definition and variants Kinds of blur Hand-shake Defocus Credit: Kenneth Josephson Motion Credit: Kenneth Josephson Kinds of blur Spatially invariant vs. Spatially varying
Cameras. Outline. Pinhole camera. Camera trial #1. Pinhole camera Film camera Digital camera Video camera
 Outline Cameras Pinhole camera Film camera Digital camera Video camera Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/3/6 with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros
Outline Cameras Pinhole camera Film camera Digital camera Video camera Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/3/6 with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros
What will be on the midterm?
 What will be on the midterm? CS 178, Spring 2014 Marc Levoy Computer Science Department Stanford University General information 2 Monday, 7-9pm, Cubberly Auditorium (School of Edu) closed book, no notes
What will be on the midterm? CS 178, Spring 2014 Marc Levoy Computer Science Department Stanford University General information 2 Monday, 7-9pm, Cubberly Auditorium (School of Edu) closed book, no notes
Implementation of Adaptive Coded Aperture Imaging using a Digital Micro-Mirror Device for Defocus Deblurring
 Implementation of Adaptive Coded Aperture Imaging using a Digital Micro-Mirror Device for Defocus Deblurring Ashill Chiranjan and Bernardt Duvenhage Defence, Peace, Safety and Security Council for Scientific
Implementation of Adaptive Coded Aperture Imaging using a Digital Micro-Mirror Device for Defocus Deblurring Ashill Chiranjan and Bernardt Duvenhage Defence, Peace, Safety and Security Council for Scientific
Why learn about photography in this course?
 Why learn about photography in this course? Geri's Game: Note the background is blurred. - photography: model of image formation - Many computer graphics methods use existing photographs e.g. texture &
Why learn about photography in this course? Geri's Game: Note the background is blurred. - photography: model of image formation - Many computer graphics methods use existing photographs e.g. texture &
lecture 24 image capture - photography: model of image formation - image blur - camera settings (f-number, shutter speed) - exposure - camera response
 - exposure - camera response") lecture 24 image capture - photography: model of image formation - image blur - camera settings (f-number, shutter speed) - exposure - camera response - application: high dynamic range imaging Why learn
lecture 24 image capture - photography: model of image formation - image blur - camera settings (f-number, shutter speed) - exposure - camera response - application: high dynamic range imaging Why learn
Demosaicing and Denoising on Simulated Light Field Images
 Demosaicing and Denoising on Simulated Light Field Images Trisha Lian Stanford University tlian@stanford.edu Kyle Chiang Stanford University kchiang@stanford.edu Abstract Light field cameras use an array
Demosaicing and Denoising on Simulated Light Field Images Trisha Lian Stanford University tlian@stanford.edu Kyle Chiang Stanford University kchiang@stanford.edu Abstract Light field cameras use an array
La photographie numérique. Frank NIELSEN Lundi 7 Juin 2010
 La photographie numérique Frank NIELSEN Lundi 7 Juin 2010 1 Le Monde digital Key benefits of the analog2digital paradigm shift? Dissociate contents from support : binarize Universal player (CPU, Turing
La photographie numérique Frank NIELSEN Lundi 7 Juin 2010 1 Le Monde digital Key benefits of the analog2digital paradigm shift? Dissociate contents from support : binarize Universal player (CPU, Turing
High resolution extended depth of field microscopy using wavefront coding
 High resolution extended depth of field microscopy using wavefront coding Matthew R. Arnison *, Peter Török #, Colin J. R. Sheppard *, W. T. Cathey +, Edward R. Dowski, Jr. +, Carol J. Cogswell *+ * Physical
High resolution extended depth of field microscopy using wavefront coding Matthew R. Arnison *, Peter Török #, Colin J. R. Sheppard *, W. T. Cathey +, Edward R. Dowski, Jr. +, Carol J. Cogswell *+ * Physical
Image Formation and Capture. Acknowledgment: some figures by B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, and A. Theuwissen
 Image Formation and Capture Acknowledgment: some figures by B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, and A. Theuwissen Image Formation and Capture Real world Optics Sensor Devices Sources of Error
Image Formation and Capture Acknowledgment: some figures by B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, and A. Theuwissen Image Formation and Capture Real world Optics Sensor Devices Sources of Error
6.A44 Computational Photography
 Add date: Friday 6.A44 Computational Photography Depth of Field Frédo Durand We allow for some tolerance What happens when we close the aperture by two stop? Aperture diameter is divided by two is doubled
Add date: Friday 6.A44 Computational Photography Depth of Field Frédo Durand We allow for some tolerance What happens when we close the aperture by two stop? Aperture diameter is divided by two is doubled
Modeling and Synthesis of Aperture Effects in Cameras
 Modeling and Synthesis of Aperture Effects in Cameras Douglas Lanman, Ramesh Raskar, and Gabriel Taubin Computational Aesthetics 2008 20 June, 2008 1 Outline Introduction and Related Work Modeling Vignetting
Modeling and Synthesis of Aperture Effects in Cameras Douglas Lanman, Ramesh Raskar, and Gabriel Taubin Computational Aesthetics 2008 20 June, 2008 1 Outline Introduction and Related Work Modeling Vignetting
Overview. Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image
 Camera & Color Overview Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image Book: Hartley 6.1, Szeliski 2.1.5, 2.2, 2.3 The trip
Camera & Color Overview Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image Book: Hartley 6.1, Szeliski 2.1.5, 2.2, 2.3 The trip
Building a Real Camera
 Building a Real Camera Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible? Less light gets through Diffraction
Building a Real Camera Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible? Less light gets through Diffraction
Announcement A total of 5 (five) late days are allowed for projects. Office hours
 late days are allowed for projects. Office hours") Announcement A total of 5 (five) late days are allowed for projects. Office hours Me: 3:50-4:50pm Thursday (or by appointment) Jake: 12:30-1:30PM Monday and Wednesday Image Formation Digital Camera Film
Announcement A total of 5 (five) late days are allowed for projects. Office hours Me: 3:50-4:50pm Thursday (or by appointment) Jake: 12:30-1:30PM Monday and Wednesday Image Formation Digital Camera Film
Sensing Increased Image Resolution Using Aperture Masks
 Sensing Increased Image Resolution Using Aperture Masks Ankit Mohan, Xiang Huang, Jack Tumblin Northwestern University Ramesh Raskar MIT Media Lab CVPR 2008 Supplemental Material Contributions Achieve
Sensing Increased Image Resolution Using Aperture Masks Ankit Mohan, Xiang Huang, Jack Tumblin Northwestern University Ramesh Raskar MIT Media Lab CVPR 2008 Supplemental Material Contributions Achieve
Tomorrow s Digital Photography
 Tomorrow s Digital Photography Gerald Peter Vienna University of Technology Figure 1: a) - e): A series of photograph with five different exposures. f) In the high dynamic range image generated from a)
Tomorrow s Digital Photography Gerald Peter Vienna University of Technology Figure 1: a) - e): A series of photograph with five different exposures. f) In the high dynamic range image generated from a)
Supplementary Information
 Supplementary Information Simultaneous whole- animal 3D- imaging of neuronal activity using light field microscopy Robert Prevedel 1-3,10, Young- Gyu Yoon 4,5,10, Maximilian Hoffmann,1-3, Nikita Pak 5,6,
Supplementary Information Simultaneous whole- animal 3D- imaging of neuronal activity using light field microscopy Robert Prevedel 1-3,10, Young- Gyu Yoon 4,5,10, Maximilian Hoffmann,1-3, Nikita Pak 5,6,
Understanding camera trade-offs through a Bayesian analysis of light field projections - A revision Anat Levin, William Freeman, and Fredo Durand
 Computer Science and Artificial Intelligence Laboratory Technical Report MIT-CSAIL-TR-2008-049 July 28, 2008 Understanding camera trade-offs through a Bayesian analysis of light field projections - A revision
Computer Science and Artificial Intelligence Laboratory Technical Report MIT-CSAIL-TR-2008-049 July 28, 2008 Understanding camera trade-offs through a Bayesian analysis of light field projections - A revision
Understanding camera trade-offs through a Bayesian analysis of light field projections Anat Levin, William T. Freeman, and Fredo Durand
 Computer Science and Artificial Intelligence Laboratory Technical Report MIT-CSAIL-TR-2008-021 April 16, 2008 Understanding camera trade-offs through a Bayesian analysis of light field projections Anat
Computer Science and Artificial Intelligence Laboratory Technical Report MIT-CSAIL-TR-2008-021 April 16, 2008 Understanding camera trade-offs through a Bayesian analysis of light field projections Anat
Camera Simulation. References. Photography, B. London and J. Upton Optics in Photography, R. Kingslake The Camera, The Negative, The Print, A.
 Camera Simulation Effect Cause Field of view Film size, focal length Depth of field Aperture, focal length Exposure Film speed, aperture, shutter Motion blur Shutter References Photography, B. London and
Camera Simulation Effect Cause Field of view Film size, focal length Depth of field Aperture, focal length Exposure Film speed, aperture, shutter Motion blur Shutter References Photography, B. London and
MAS.963 Special Topics: Computational Camera and Photography
 MIT OpenCourseWare http://ocw.mit.edu MAS.963 Special Topics: Computational Camera and Photography Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms.
MIT OpenCourseWare http://ocw.mit.edu MAS.963 Special Topics: Computational Camera and Photography Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms.
When Does Computational Imaging Improve Performance?
 When Does Computational Imaging Improve Performance? Oliver Cossairt Assistant Professor Northwestern University Collaborators: Mohit Gupta, Changyin Zhou, Daniel Miau, Shree Nayar (Columbia University)
When Does Computational Imaging Improve Performance? Oliver Cossairt Assistant Professor Northwestern University Collaborators: Mohit Gupta, Changyin Zhou, Daniel Miau, Shree Nayar (Columbia University)
Dr F. Cuzzolin 1. September 29, 2015
 P00407 Principles of Computer Vision 1 1 Department of Computing and Communication Technologies Oxford Brookes University, UK September 29, 2015 September 29, 2015 1 / 73 Outline of the Lecture 1 2 Basics
P00407 Principles of Computer Vision 1 1 Department of Computing and Communication Technologies Oxford Brookes University, UK September 29, 2015 September 29, 2015 1 / 73 Outline of the Lecture 1 2 Basics
Image Formation III Chapter 1 (Forsyth&Ponce) Cameras Lenses & Sensors
 Cameras Lenses & Sensors") Image Formation III Chapter 1 (Forsyth&Ponce) Cameras Lenses & Sensors Guido Gerig CS-GY 6643, Spring 2017 (slides modified from Marc Pollefeys, UNC Chapel Hill/ ETH Zurich, With content from Prof. Trevor
Image Formation III Chapter 1 (Forsyth&Ponce) Cameras Lenses & Sensors Guido Gerig CS-GY 6643, Spring 2017 (slides modified from Marc Pollefeys, UNC Chapel Hill/ ETH Zurich, With content from Prof. Trevor
Improved motion invariant imaging with time varying shutter functions
 Improved motion invariant imaging with time varying shutter functions Steve Webster a and Andrew Dorrell b Canon Information Systems Research, Australia (CiSRA), Thomas Holt Drive, North Ryde, Australia
Improved motion invariant imaging with time varying shutter functions Steve Webster a and Andrew Dorrell b Canon Information Systems Research, Australia (CiSRA), Thomas Holt Drive, North Ryde, Australia
IMAGE FORMATION. Light source properties. Sensor characteristics Surface. Surface reflectance properties. Optics
 IMAGE FORMATION Light source properties Sensor characteristics Surface Exposure shape Optics Surface reflectance properties ANALOG IMAGES An image can be understood as a 2D light intensity function f(x,y)
IMAGE FORMATION Light source properties Sensor characteristics Surface Exposure shape Optics Surface reflectance properties ANALOG IMAGES An image can be understood as a 2D light intensity function f(x,y)
CS 89.15/189.5, Fall 2015 ASPECTS OF DIGITAL PHOTOGRAPHY COMPUTATIONAL. Image Processing Basics. Wojciech Jarosz
 CS 89.15/189.5, Fall 2015 COMPUTATIONAL ASPECTS OF DIGITAL PHOTOGRAPHY Image Processing Basics Wojciech Jarosz wojciech.k.jarosz@dartmouth.edu Domain, range Domain vs. range 2D plane: domain of images
CS 89.15/189.5, Fall 2015 COMPUTATIONAL ASPECTS OF DIGITAL PHOTOGRAPHY Image Processing Basics Wojciech Jarosz wojciech.k.jarosz@dartmouth.edu Domain, range Domain vs. range 2D plane: domain of images
Cameras and Sensors. Today. Today. It receives light from all directions. BIL721: Computational Photography! Spring 2015, Lecture 2!
 !! Cameras and Sensors Today Pinhole camera! Lenses! Exposure! Sensors! photo by Abelardo Morell BIL721: Computational Photography! Spring 2015, Lecture 2! Aykut Erdem! Hacettepe University! Computer Vision
!! Cameras and Sensors Today Pinhole camera! Lenses! Exposure! Sensors! photo by Abelardo Morell BIL721: Computational Photography! Spring 2015, Lecture 2! Aykut Erdem! Hacettepe University! Computer Vision
Time-Lapse Light Field Photography With a 7 DoF Arm
 Time-Lapse Light Field Photography With a 7 DoF Arm John Oberlin and Stefanie Tellex Abstract A photograph taken by a conventional camera captures the average intensity of light at each pixel, discarding
Time-Lapse Light Field Photography With a 7 DoF Arm John Oberlin and Stefanie Tellex Abstract A photograph taken by a conventional camera captures the average intensity of light at each pixel, discarding
Intorduction to light sources, pinhole cameras, and lenses
 Intorduction to light sources, pinhole cameras, and lenses Erik G. Learned-Miller Department of Computer Science University of Massachusetts, Amherst Amherst, MA 01003 October 26, 2011 Abstract 1 1 Analyzing
Intorduction to light sources, pinhole cameras, and lenses Erik G. Learned-Miller Department of Computer Science University of Massachusetts, Amherst Amherst, MA 01003 October 26, 2011 Abstract 1 1 Analyzing
Computer Vision. The Pinhole Camera Model
 Computer Vision The Pinhole Camera Model Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2017/2018 Imaging device
Computer Vision The Pinhole Camera Model Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2017/2018 Imaging device
Lecture 30: Image Sensors (Cont) Computer Graphics and Imaging UC Berkeley CS184/284A
 Computer Graphics and Imaging UC Berkeley CS184/284A") Lecture 30: Image Sensors (Cont) Computer Graphics and Imaging UC Berkeley Reminder: The Pixel Stack Microlens array Color Filter Anti-Reflection Coating Stack height 4um is typical Pixel size 2um is typical
Lecture 30: Image Sensors (Cont) Computer Graphics and Imaging UC Berkeley Reminder: The Pixel Stack Microlens array Color Filter Anti-Reflection Coating Stack height 4um is typical Pixel size 2um is typical
Cameras. Steve Rotenberg CSE168: Rendering Algorithms UCSD, Spring 2017
 Cameras Steve Rotenberg CSE168: Rendering Algorithms UCSD, Spring 2017 Camera Focus Camera Focus So far, we have been simulating pinhole cameras with perfect focus Often times, we want to simulate more
Cameras Steve Rotenberg CSE168: Rendering Algorithms UCSD, Spring 2017 Camera Focus Camera Focus So far, we have been simulating pinhole cameras with perfect focus Often times, we want to simulate more
Dappled Photography: Mask Enhanced Cameras for Heterodyned Light Fields and Coded Aperture Refocusing
 MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Dappled Photography: Mask Enhanced Cameras for Heterodyned Light Fields and Coded Aperture Refocusing Ashok Veeraraghavan, Ramesh Raskar, Amit
MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Dappled Photography: Mask Enhanced Cameras for Heterodyned Light Fields and Coded Aperture Refocusing Ashok Veeraraghavan, Ramesh Raskar, Amit
Toward Non-stationary Blind Image Deblurring: Models and Techniques
 Toward Non-stationary Blind Image Deblurring: Models and Techniques Ji, Hui Department of Mathematics National University of Singapore NUS, 30-May-2017 Outline of the talk Non-stationary Image blurring
Toward Non-stationary Blind Image Deblurring: Models and Techniques Ji, Hui Department of Mathematics National University of Singapore NUS, 30-May-2017 Outline of the talk Non-stationary Image blurring
Image Formation and Capture
 Figure credits: B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, A. Theuwissen, and J. Malik Image Formation and Capture COS 429: Computer Vision Image Formation and Capture Real world Optics Sensor Devices
Figure credits: B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, A. Theuwissen, and J. Malik Image Formation and Capture COS 429: Computer Vision Image Formation and Capture Real world Optics Sensor Devices
multiframe visual-inertial blur estimation and removal for unmodified smartphones
 multiframe visual-inertial blur estimation and removal for unmodified smartphones, Severin Münger, Carlo Beltrame, Luc Humair WSCG 2015, Plzen, Czech Republic images taken by non-professional photographers
multiframe visual-inertial blur estimation and removal for unmodified smartphones, Severin Münger, Carlo Beltrame, Luc Humair WSCG 2015, Plzen, Czech Republic images taken by non-professional photographers
The Camera : Computational Photography Alexei Efros, CMU, Fall 2008
 The Camera 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 How do we see the world? object film Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable
The Camera 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 How do we see the world? object film Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable
Sampling and pixels. CS 178, Spring Marc Levoy Computer Science Department Stanford University. Begun 4/23, finished 4/25.
 Sampling and pixels CS 178, Spring 2013 Begun 4/23, finished 4/25. Marc Levoy Computer Science Department Stanford University Why study sampling theory? Why do I sometimes get moiré artifacts in my images?
Sampling and pixels CS 178, Spring 2013 Begun 4/23, finished 4/25. Marc Levoy Computer Science Department Stanford University Why study sampling theory? Why do I sometimes get moiré artifacts in my images?
Introduction , , Computational Photography Fall 2018, Lecture 1
 Introduction http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 1 Overview of today s lecture Teaching staff introductions What is computational
Introduction http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 1 Overview of today s lecture Teaching staff introductions What is computational
Focal Sweep Videography with Deformable Optics
 Focal Sweep Videography with Deformable Optics Daniel Miau Columbia University dmiau@cs.columbia.edu Oliver Cossairt Northwestern University ollie@eecs.northwestern.edu Shree K. Nayar Columbia University
Focal Sweep Videography with Deformable Optics Daniel Miau Columbia University dmiau@cs.columbia.edu Oliver Cossairt Northwestern University ollie@eecs.northwestern.edu Shree K. Nayar Columbia University
Image Formation. Dr. Gerhard Roth. COMP 4102A Winter 2015 Version 3
 Image Formation Dr. Gerhard Roth COMP 4102A Winter 2015 Version 3 1 Image Formation Two type of images Intensity image encodes light intensities (passive sensor) Range (depth) image encodes shape and distance
Image Formation Dr. Gerhard Roth COMP 4102A Winter 2015 Version 3 1 Image Formation Two type of images Intensity image encodes light intensities (passive sensor) Range (depth) image encodes shape and distance
Principles of Light Field Imaging: Briefly revisiting 25 years of research
 Principles of Light Field Imaging: Briefly revisiting 25 years of research Ivo Ihrke, John Restrepo, Lois Mignard-Debise To cite this version: Ivo Ihrke, John Restrepo, Lois Mignard-Debise. Principles
Principles of Light Field Imaging: Briefly revisiting 25 years of research Ivo Ihrke, John Restrepo, Lois Mignard-Debise To cite this version: Ivo Ihrke, John Restrepo, Lois Mignard-Debise. Principles
Basic principles of photography. David Capel 346B IST
 Basic principles of photography David Capel 346B IST Latin Camera Obscura = Dark Room Light passing through a small hole produces an inverted image on the opposite wall Safely observing the solar eclipse
Basic principles of photography David Capel 346B IST Latin Camera Obscura = Dark Room Light passing through a small hole produces an inverted image on the opposite wall Safely observing the solar eclipse
Virtual and Digital Cameras
 CS148: Introduction to Computer Graphics and Imaging Virtual and Digital Cameras Ansel Adams Topics Effect Cause Field of view Film size, focal length Perspective Lens, focal length Focus Dist. of lens
CS148: Introduction to Computer Graphics and Imaging Virtual and Digital Cameras Ansel Adams Topics Effect Cause Field of view Film size, focal length Perspective Lens, focal length Focus Dist. of lens
Angle Sensitive Imaging: A New Paradigm for Light Field Imaging
 Angle Sensitive Imaging: A New Paradigm for Light Field Imaging VIGIL VARGHESE School of Electrical and Electronic Engineering A thesis submitted to the Nanyang Technological University in partial fulfillment
Angle Sensitive Imaging: A New Paradigm for Light Field Imaging VIGIL VARGHESE School of Electrical and Electronic Engineering A thesis submitted to the Nanyang Technological University in partial fulfillment
Raskar, Camera Culture, MIT Media Lab. Ramesh Raskar. Camera Culture. Associate Professor, MIT Media Lab
 Raskar, Camera Culture, MIT Media Lab Camera Culture Ramesh Raskar C C lt Camera Culture Associate Professor, MIT Media Lab Where are the camera s? Where are the camera s? We focus on creating tools to
Raskar, Camera Culture, MIT Media Lab Camera Culture Ramesh Raskar C C lt Camera Culture Associate Professor, MIT Media Lab Where are the camera s? Where are the camera s? We focus on creating tools to
( ) Deriving the Lens Transmittance Function. Thin lens transmission is given by a phase with unit magnitude.
 Deriving the Lens Transmittance Function. Thin lens transmission is given by a phase with unit magnitude.") Deriving the Lens Transmittance Function Thin lens transmission is given by a phase with unit magnitude. t(x, y) = exp[ jk o ]exp[ jk(n 1) (x, y) ] Find the thickness function for left half of the lens
Deriving the Lens Transmittance Function Thin lens transmission is given by a phase with unit magnitude. t(x, y) = exp[ jk o ]exp[ jk(n 1) (x, y) ] Find the thickness function for left half of the lens
Computational Photography Introduction
 Computational Photography Introduction Jongmin Baek CS 478 Lecture Jan 9, 2012 Background Sales of digital cameras surpassed sales of film cameras in 2004. Digital cameras are cool Free film Instant display
Computational Photography Introduction Jongmin Baek CS 478 Lecture Jan 9, 2012 Background Sales of digital cameras surpassed sales of film cameras in 2004. Digital cameras are cool Free film Instant display
Wavelengths and Colors. Ankit Mohan MAS.131/531 Fall 2009
 Wavelengths and Colors Ankit Mohan MAS.131/531 Fall 2009 Epsilon over time (Multiple photos) Prokudin-Gorskii, Sergei Mikhailovich, 1863-1944, photographer. Congress. Epsilon over time (Bracketing) Image
Wavelengths and Colors Ankit Mohan MAS.131/531 Fall 2009 Epsilon over time (Multiple photos) Prokudin-Gorskii, Sergei Mikhailovich, 1863-1944, photographer. Congress. Epsilon over time (Bracketing) Image
Observational Astronomy
 Observational Astronomy Instruments The telescope- instruments combination forms a tightly coupled system: Telescope = collecting photons and forming an image Instruments = registering and analyzing the
Observational Astronomy Instruments The telescope- instruments combination forms a tightly coupled system: Telescope = collecting photons and forming an image Instruments = registering and analyzing the
AN INTRODUCTION TO CHROMATIC ABERRATION IN REFRACTORS
 AN INTRODUCTION TO CHROMATIC ABERRATION IN REFRACTORS The popularity of high-quality refractors draws attention to color correction in such instruments. There are several point of confusion and misconceptions.
AN INTRODUCTION TO CHROMATIC ABERRATION IN REFRACTORS The popularity of high-quality refractors draws attention to color correction in such instruments. There are several point of confusion and misconceptions.
Chapters 1 & 2. Definitions and applications Conceptual basis of photogrammetric processing
 Chapters 1 & 2 Chapter 1: Photogrammetry Definitions and applications Conceptual basis of photogrammetric processing Transition from two-dimensional imagery to three-dimensional information Automation
Chapters 1 & 2 Chapter 1: Photogrammetry Definitions and applications Conceptual basis of photogrammetric processing Transition from two-dimensional imagery to three-dimensional information Automation
Coded Computational Imaging: Light Fields and Applications
 Coded Computational Imaging: Light Fields and Applications Ankit Mohan MIT Media Lab Coded Computational Imaging Agrawal, Veeraraghavan, Narasimhan & Mohan Schedule Introduction Assorted Pixels Coding
Coded Computational Imaging: Light Fields and Applications Ankit Mohan MIT Media Lab Coded Computational Imaging Agrawal, Veeraraghavan, Narasimhan & Mohan Schedule Introduction Assorted Pixels Coding
Unit 1: Image Formation
 Unit 1: Image Formation 1. Geometry 2. Optics 3. Photometry 4. Sensor Readings Szeliski 2.1-2.3 & 6.3.5 1 Physical parameters of image formation Geometric Type of projection Camera pose Optical Sensor
Unit 1: Image Formation 1. Geometry 2. Optics 3. Photometry 4. Sensor Readings Szeliski 2.1-2.3 & 6.3.5 1 Physical parameters of image formation Geometric Type of projection Camera pose Optical Sensor
Acquisition. Some slides from: Yung-Yu Chuang (DigiVfx) Jan Neumann, Pat Hanrahan, Alexei Efros
 Jan Neumann, Pat Hanrahan, Alexei Efros") Acquisition Some slides from: Yung-Yu Chuang (DigiVfx) Jan Neumann, Pat Hanrahan, Alexei Efros Image Acquisition Digital Camera Film Outline Pinhole camera Lens Lens aberrations Exposure Sensors Noise
Acquisition Some slides from: Yung-Yu Chuang (DigiVfx) Jan Neumann, Pat Hanrahan, Alexei Efros Image Acquisition Digital Camera Film Outline Pinhole camera Lens Lens aberrations Exposure Sensors Noise
Limitations of lenses
 Limitations of lenses CS 448A, Winter 2010 Marc Levoy Computer Science Department Stanford University Outline misfocus & depth of field aberrations & distortion veiling glare flare and ghost images vignetting
Limitations of lenses CS 448A, Winter 2010 Marc Levoy Computer Science Department Stanford University Outline misfocus & depth of field aberrations & distortion veiling glare flare and ghost images vignetting
Spatial Resolution and Contrast of a Focused Diffractive Plenoptic Camera
 Air Force Institute of Technology AFIT Scholar Theses and Dissertations 3-23-2018 Spatial Resolution and Contrast of a Focused Diffractive Plenoptic Camera Carlos D. Diaz Follow this and additional works
Air Force Institute of Technology AFIT Scholar Theses and Dissertations 3-23-2018 Spatial Resolution and Contrast of a Focused Diffractive Plenoptic Camera Carlos D. Diaz Follow this and additional works