Capturing Light. The Light Field. Grayscale Snapshot 12/1/16. P(q, f)
|
|
|
- Alexander Jenkins
- 6 years ago
- Views:
Transcription




 is intensity of light Seen from a single")
1 Capturing Light Rooms by the Sea, Edward Hopper, 1951 The Penitent Magdalen, Georges de La Tour, c Some slides from M. Agrawala, F. Durand, P. Debevec, A. Efros, R. Fergus, D. Forsyth, M. Levoy, and S. Seitz The Light Field Figure by Leonard McMillan What is the set of all things that we can ever see? Answer: The Light Field (aka Plenoptic Function) Let s start with a stationary person and try to parameterize everything that she can see OPALE "Sparkles and Wine" 2013 Grayscale Snapshot P(q, f) is intensity of light Seen from a single viewpoint At a single time Averaged over the wavelengths of the visible spectrum 1
2 Color Snapshot P(q, f, l) is intensity of light Seen from a single viewpoint At a single time As a function of wavelength A Movie P(q, f, l, t) is intensity of light Seen from a single viewpoint Over time As a function of wavelength Holographic Movie The Light Field P(q, f, l, t, VX, VY, VZ) P(q, f, l, t, VX, VY, VZ) is intensity of light Seen from ANY viewpoint Over time As a function of wavelength Can reconstruct every possible view, at every moment, from every position, at every wavelength Contains every photograph, every movie, everything that anyone has ever seen! 2






3 Sampling the Light Field Camera Lighting Surface Camera A camera is a device for capturing and storing samples of the Light Field Building Better Cameras Modify Optics: Wide-Angle Imaging Capture more rays Higher density sensor arrays Multiple Cameras Catadioptric Imaging Color cameras, multi-spectral cameras Video cameras Examples: Disney 55, McCutchen 91, Nalwa 96, Swaminathan & Nayar 99, Cutler et al. 02 Examples: Rees 70, Charles 87, Nayar 88, Yagi 90, Hong 91, Yamazawa 95, Bogner 95, Nalwa 96, Nayar 97, Chahl & Srinivasan 97 3


4 Catadioptric Cameras for 360 Imaging Omnidirectional Image Catadioptric Imaging Catadioptric Imaging Camera s Viewpoint Camera Mirror Subject 4
5 Catadioptric Imaging Virtual Viewpoint 1 Mirrors Camera s Viewpoint Virtual Viewpoint 2 Catadioptric Imaging Virtual Viewpoint 1 Camera s Viewpoint Virtual Viewpoint 2 Catadioptric Imaging Reconstructing Faces Circular Viewpoint Locus Camera Mirror Subject 5








6 Reconstructing Faces Stereo Views Femto Photography 3D Reconstructions FemtoFlash UltraFast Detector A trillion frame per second camera Serious Sync Computational Optics See UW research on this by Prof. Andreas Velten 6

7 The Light Field How to Capture it? What s it good for? The Light Field Surface Ray Ignoring time and color, one sample: 4D: 2D direction 2D position non-dispersive medium P(q, f, VX, VY, VZ) 5D 3D position 2D direction Slide by Rick Szeliski and Michael Cohen 7
8 Light Field - Organization Light Field - Organization 2D position 2D direction q s 2D position 2D position s u 2 plane parameterization Slide by Rick Szeliski and Michael Cohen Slide by Rick Szeliski and Michael Cohen Light Field - Organization Light Field - Organization 2D position 2D position t s,t s,t u,v v Hold s, t constant Let u, v vary An image u,v 2 plane parameterization s u Slide by Rick Szeliski and Michael Cohen s,t u,v Slide by Rick Szeliski and Michael Cohen 8
 Multiple cameras One camera + multiple")

9 Light Field How to Capture Light Fields? One camera + move object (and light sources) Multiple cameras One camera + multiple microlenses Light Field - Capture Gantry Idea 1 Move camera carefully over s, t plane Gantry Lazy Susan Manually rotated XY Positioner Lights turn with lazy susan Correctness by construction s,t u,v Slide by Rick Szeliski and Michael Cohen 9




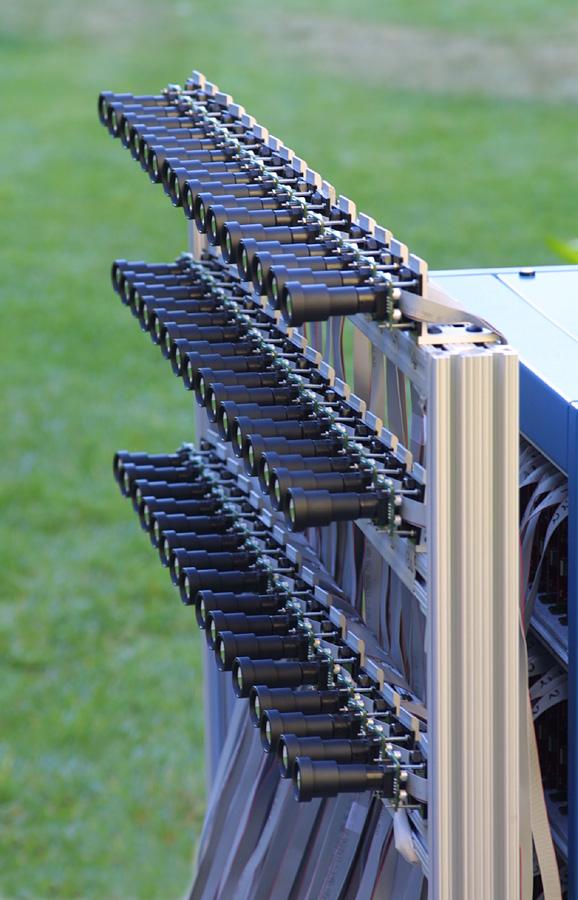
10 Multi-Camera Arrays Stanford s pixels 30 fps 128 cameras synchronized timing continuous streaming flexible arrangement Stanford Tiled Camera Array What s a Light Field Good For? Synthetic aperture photography Seeing through occluding objects Refocusing Changing Depth of Field Synthesizing images from novel viewpoints 10

![2004] 45 cameras aimed](/docs-images/73/69162001/images/11-1.jpg "at bushes Photography")
11 Synthetic Aperture Photography [Vaish CVPR 2004] 45 cameras aimed at bushes Synthetic Aperture Photography Synthetic Aperture Photography 11

12 Synthetic Aperture Photography Red point effectively disappears because it is so blurry Synthetic Aperture Photography If aperture is larger than a foreground occluding object, then some rays from behind the object are captured Leonardo da Vinci observed that if you hold a needle in front of your eye, it adds haze but does not completely obscure any part of it (because your eye s pupil is bigger than the needle) Synthetic Aperture Photography Synthetic Aperture Photography 12



13 Synthetic Aperture Photography Another way to think about synthetic aperture photography take the images from all the cameras rectify them to a common plane in scene (focal plane) shift them by a certain amount and add them together Objects that become aligned by the shifting process will be sharply focused objects in front of that plane are blurred away objects in back of that plane are blurred away Synthetic Aperture Photography One image of people behind bushes Reconstructed synthetic aperture image 13

")


14 How to Capture Light Fields? Light Field Photography using a Handheld Light Field Camera Ren Ng, Marc Levoy, Mathieu Brédif, Gene Duval, Mark Horowitz and Pat Hanrahan One camera + move object (and light sources) Multiple cameras One camera + multiple microlenses Proc. SIGGRAPH 2005 Lytro Illum Light Field Camera Conventional vs. Light Field Camera mm lens 8.3x optical zoom f/2.0 aperture $280 ($1,600 MSRP) 40 megaray ½ CMOS sensor Maximum image resolution: (4.0 megapixels) 14







15 Conventional vs. Light Field Camera uv-plane st-plane Conventional vs. Light Field Camera st-plane uv-plane Prototype Camera Contax medium format camera Adaptive Optics microlens array Kodak 16-megapixel sensor 125µ square-sided microlenses pixels lenses = pixels per lens 15



 illustrates microlenses on edges at the focal plane (the fingers that are clasped together).")

16 c Digitally Stopping-Down a b c (a) illustrates microlenses at depths closer than the focal plane. In these right-side up microlens images, the woman s cheek appears on the left, as it appears in the macroscopic image. (b) illustrates microlenses at depths further than the focal plane. In these inverted microlens images, the man s cheek appears on the right, opposite the macroscopic world. This effect is due to inversion of the microlens rays as they pass through the world focal plane before arriving at the main lens. (c) illustrates microlenses on edges at the focal plane (the fingers that are clasped together). The microlenses at this depth are constant in color because all the rays arriving at the microlens originate from the same point on the fingers, which reflect light diffusely. a b Σ Σ stopping down = summing only the central portion of each microlens Digital Refocusing Example of Digital Refocusing Σ Σ refocusing = summing windows extracted from several microlenses 16



![[Agarwala 2004] Digitally](/docs-images/73/69162001/images/17-3.jpg "Moving the Observer Example")


17 Refocusing Portraits Extending the Depth of Field conventional photograph, main lens at f / 4 conventional photograph, main lens at f / 22 light field, main lens at f / 4, after all-focus algorithm [Agarwala 2004] Digitally Moving the Observer Example of Moving the Observer Σ Σ moving the observer = moving the window we extract from the microlenses 17




18 Moving Backward and Forward Implications Other ways to Sample the Plenoptic Function Cuts the unwanted link between exposure (due to the aperture) and depth of field Trades off spatial resolution for ability to refocus and adjust the perspective Sensor pixels should be made even smaller, subject to the diffraction limit 36mm 24mm 2µ pixels = 216 megapixels 18K 12K pixels pixels rays per pixel Moving in time: Spatio-temporal volume: P(q, f, t) Useful to study temporal changes Long an interest of artists Claude Monet, Haystacks studies 18

19 Space-Time Images Other ways to slice the plenoptic function: t y x 19
Light field sensing. Marc Levoy. Computer Science Department Stanford University
 Light field sensing Marc Levoy Computer Science Department Stanford University The scalar light field (in geometrical optics) Radiance as a function of position and direction in a static scene with fixed
Light field sensing Marc Levoy Computer Science Department Stanford University The scalar light field (in geometrical optics) Radiance as a function of position and direction in a static scene with fixed
Lecture 18: Light field cameras. (plenoptic cameras) Visual Computing Systems CMU , Fall 2013
 Visual Computing Systems CMU , Fall 2013") Lecture 18: Light field cameras (plenoptic cameras) Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today:
Lecture 18: Light field cameras (plenoptic cameras) Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today:
Light field photography and microscopy
 Light field photography and microscopy Marc Levoy Computer Science Department Stanford University The light field (in geometrical optics) Radiance as a function of position and direction in a static scene
Light field photography and microscopy Marc Levoy Computer Science Department Stanford University The light field (in geometrical optics) Radiance as a function of position and direction in a static scene
Computational Approaches to Cameras
 Computational Approaches to Cameras 11/16/17 Magritte, The False Mirror (1935) Computational Photography Derek Hoiem, University of Illinois Announcements Final project proposal due Monday (see links on
Computational Approaches to Cameras 11/16/17 Magritte, The False Mirror (1935) Computational Photography Derek Hoiem, University of Illinois Announcements Final project proposal due Monday (see links on
Admin. Lightfields. Overview. Overview 5/13/2008. Idea. Projects due by the end of today. Lecture 13. Lightfield representation of a scene
 Admin Lightfields Projects due by the end of today Email me source code, result images and short report Lecture 13 Overview Lightfield representation of a scene Unified representation of all rays Overview
Admin Lightfields Projects due by the end of today Email me source code, result images and short report Lecture 13 Overview Lightfield representation of a scene Unified representation of all rays Overview
The ultimate camera. Computational Photography. Creating the ultimate camera. The ultimate camera. What does it do?
 Computational Photography The ultimate camera What does it do? Image from Durand & Freeman s MIT Course on Computational Photography Today s reading Szeliski Chapter 9 The ultimate camera Infinite resolution
Computational Photography The ultimate camera What does it do? Image from Durand & Freeman s MIT Course on Computational Photography Today s reading Szeliski Chapter 9 The ultimate camera Infinite resolution
Introduction to Light Fields
 MIT Media Lab Introduction to Light Fields Camera Culture Ramesh Raskar MIT Media Lab http://cameraculture.media.mit.edu/ Introduction to Light Fields Ray Concepts for 4D and 5D Functions Propagation of
MIT Media Lab Introduction to Light Fields Camera Culture Ramesh Raskar MIT Media Lab http://cameraculture.media.mit.edu/ Introduction to Light Fields Ray Concepts for 4D and 5D Functions Propagation of
Wavefront coding. Refocusing & Light Fields. Wavefront coding. Final projects. Is depth of field a blur? Frédo Durand Bill Freeman MIT - EECS
 6.098 Digital and Computational Photography 6.882 Advanced Computational Photography Final projects Send your slides by noon on Thrusday. Send final report Refocusing & Light Fields Frédo Durand Bill Freeman
6.098 Digital and Computational Photography 6.882 Advanced Computational Photography Final projects Send your slides by noon on Thrusday. Send final report Refocusing & Light Fields Frédo Durand Bill Freeman
To Do. Advanced Computer Graphics. Outline. Computational Imaging. How do we see the world? Pinhole camera
 Advanced Computer Graphics CSE 163 [Spring 2017], Lecture 14 Ravi Ramamoorthi http://www.cs.ucsd.edu/~ravir To Do Assignment 2 due May 19 Any last minute issues or questions? Next two lectures: Imaging,
Advanced Computer Graphics CSE 163 [Spring 2017], Lecture 14 Ravi Ramamoorthi http://www.cs.ucsd.edu/~ravir To Do Assignment 2 due May 19 Any last minute issues or questions? Next two lectures: Imaging,
Computational Photography Introduction
 Computational Photography Introduction Jongmin Baek CS 478 Lecture Jan 9, 2012 Background Sales of digital cameras surpassed sales of film cameras in 2004. Digital cameras are cool Free film Instant display
Computational Photography Introduction Jongmin Baek CS 478 Lecture Jan 9, 2012 Background Sales of digital cameras surpassed sales of film cameras in 2004. Digital cameras are cool Free film Instant display
Light-Field Database Creation and Depth Estimation
 Light-Field Database Creation and Depth Estimation Abhilash Sunder Raj abhisr@stanford.edu Michael Lowney mlowney@stanford.edu Raj Shah shahraj@stanford.edu Abstract Light-field imaging research has been
Light-Field Database Creation and Depth Estimation Abhilash Sunder Raj abhisr@stanford.edu Michael Lowney mlowney@stanford.edu Raj Shah shahraj@stanford.edu Abstract Light-field imaging research has been
Dappled Photography: Mask Enhanced Cameras for Heterodyned Light Fields and Coded Aperture Refocusing
 Dappled Photography: Mask Enhanced Cameras for Heterodyned Light Fields and Coded Aperture Refocusing Ashok Veeraraghavan, Ramesh Raskar, Ankit Mohan & Jack Tumblin Amit Agrawal, Mitsubishi Electric Research
Dappled Photography: Mask Enhanced Cameras for Heterodyned Light Fields and Coded Aperture Refocusing Ashok Veeraraghavan, Ramesh Raskar, Ankit Mohan & Jack Tumblin Amit Agrawal, Mitsubishi Electric Research
Dynamically Reparameterized Light Fields & Fourier Slice Photography. Oliver Barth, 2009 Max Planck Institute Saarbrücken
 Dynamically Reparameterized Light Fields & Fourier Slice Photography Oliver Barth, 2009 Max Planck Institute Saarbrücken Background What we are talking about? 2 / 83 Background What we are talking about?
Dynamically Reparameterized Light Fields & Fourier Slice Photography Oliver Barth, 2009 Max Planck Institute Saarbrücken Background What we are talking about? 2 / 83 Background What we are talking about?
Coded Computational Imaging: Light Fields and Applications
 Coded Computational Imaging: Light Fields and Applications Ankit Mohan MIT Media Lab Coded Computational Imaging Agrawal, Veeraraghavan, Narasimhan & Mohan Schedule Introduction Assorted Pixels Coding
Coded Computational Imaging: Light Fields and Applications Ankit Mohan MIT Media Lab Coded Computational Imaging Agrawal, Veeraraghavan, Narasimhan & Mohan Schedule Introduction Assorted Pixels Coding
Coded Aperture and Coded Exposure Photography
 Coded Aperture and Coded Exposure Photography Martin Wilson University of Cape Town Cape Town, South Africa Email: Martin.Wilson@uct.ac.za Fred Nicolls University of Cape Town Cape Town, South Africa Email:
Coded Aperture and Coded Exposure Photography Martin Wilson University of Cape Town Cape Town, South Africa Email: Martin.Wilson@uct.ac.za Fred Nicolls University of Cape Town Cape Town, South Africa Email:
Computational Cameras. Rahul Raguram COMP
 Computational Cameras Rahul Raguram COMP 790-090 What is a computational camera? Camera optics Camera sensor 3D scene Traditional camera Final image Modified optics Camera sensor Image Compute 3D scene
Computational Cameras Rahul Raguram COMP 790-090 What is a computational camera? Camera optics Camera sensor 3D scene Traditional camera Final image Modified optics Camera sensor Image Compute 3D scene
Computational Photography: Principles and Practice
 Computational Photography: Principles and Practice HCI & Robotics (HCI 및로봇응용공학 ) Ig-Jae Kim, Korea Institute of Science and Technology ( 한국과학기술연구원김익재 ) Jaewon Kim, Korea Institute of Science and Technology
Computational Photography: Principles and Practice HCI & Robotics (HCI 및로봇응용공학 ) Ig-Jae Kim, Korea Institute of Science and Technology ( 한국과학기술연구원김익재 ) Jaewon Kim, Korea Institute of Science and Technology
Coded photography , , Computational Photography Fall 2018, Lecture 14
 Coded photography http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 14 Overview of today s lecture The coded photography paradigm. Dealing with
Coded photography http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 14 Overview of today s lecture The coded photography paradigm. Dealing with
Coding and Modulation in Cameras
 Coding and Modulation in Cameras Amit Agrawal June 2010 Mitsubishi Electric Research Labs (MERL) Cambridge, MA, USA Coded Computational Imaging Agrawal, Veeraraghavan, Narasimhan & Mohan Schedule Introduction
Coding and Modulation in Cameras Amit Agrawal June 2010 Mitsubishi Electric Research Labs (MERL) Cambridge, MA, USA Coded Computational Imaging Agrawal, Veeraraghavan, Narasimhan & Mohan Schedule Introduction
Synthetic aperture photography and illumination using arrays of cameras and projectors
 Synthetic aperture photography and illumination using arrays of cameras and projectors technologies large camera arrays large projector arrays camera projector arrays Outline optical effects synthetic
Synthetic aperture photography and illumination using arrays of cameras and projectors technologies large camera arrays large projector arrays camera projector arrays Outline optical effects synthetic
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 4a: Cameras Source: S. Lazebnik Reading Szeliski chapter 2.2.3, 2.3 Image formation Let s design a camera Idea 1: put a piece of film in front of an object
CS6670: Computer Vision Noah Snavely Lecture 4a: Cameras Source: S. Lazebnik Reading Szeliski chapter 2.2.3, 2.3 Image formation Let s design a camera Idea 1: put a piece of film in front of an object
Coded photography , , Computational Photography Fall 2017, Lecture 18
 Coded photography http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 18 Course announcements Homework 5 delayed for Tuesday. - You will need cameras
Coded photography http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 18 Course announcements Homework 5 delayed for Tuesday. - You will need cameras
Building a Real Camera. Slides Credit: Svetlana Lazebnik
 Building a Real Camera Slides Credit: Svetlana Lazebnik Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible?
Building a Real Camera Slides Credit: Svetlana Lazebnik Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible?
Building a Real Camera
 Building a Real Camera Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible? Less light gets through Diffraction
Building a Real Camera Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible? Less light gets through Diffraction
DEPTH FUSED FROM INTENSITY RANGE AND BLUR ESTIMATION FOR LIGHT-FIELD CAMERAS. Yatong Xu, Xin Jin and Qionghai Dai
 DEPTH FUSED FROM INTENSITY RANGE AND BLUR ESTIMATION FOR LIGHT-FIELD CAMERAS Yatong Xu, Xin Jin and Qionghai Dai Shenhen Key Lab of Broadband Network and Multimedia, Graduate School at Shenhen, Tsinghua
DEPTH FUSED FROM INTENSITY RANGE AND BLUR ESTIMATION FOR LIGHT-FIELD CAMERAS Yatong Xu, Xin Jin and Qionghai Dai Shenhen Key Lab of Broadband Network and Multimedia, Graduate School at Shenhen, Tsinghua
Coded Computational Photography!
 Coded Computational Photography! EE367/CS448I: Computational Imaging and Display! stanford.edu/class/ee367! Lecture 9! Gordon Wetzstein! Stanford University! Coded Computational Photography - Overview!!
Coded Computational Photography! EE367/CS448I: Computational Imaging and Display! stanford.edu/class/ee367! Lecture 9! Gordon Wetzstein! Stanford University! Coded Computational Photography - Overview!!
La photographie numérique. Frank NIELSEN Lundi 7 Juin 2010
 La photographie numérique Frank NIELSEN Lundi 7 Juin 2010 1 Le Monde digital Key benefits of the analog2digital paradigm shift? Dissociate contents from support : binarize Universal player (CPU, Turing
La photographie numérique Frank NIELSEN Lundi 7 Juin 2010 1 Le Monde digital Key benefits of the analog2digital paradigm shift? Dissociate contents from support : binarize Universal player (CPU, Turing
Lenses, exposure, and (de)focus
focus") Lenses, exposure, and (de)focus http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 15 Course announcements Homework 4 is out. - Due October 26
Lenses, exposure, and (de)focus http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 15 Course announcements Homework 4 is out. - Due October 26
Simulated Programmable Apertures with Lytro
 Simulated Programmable Apertures with Lytro Yangyang Yu Stanford University yyu10@stanford.edu Abstract This paper presents a simulation method using the commercial light field camera Lytro, which allows
Simulated Programmable Apertures with Lytro Yangyang Yu Stanford University yyu10@stanford.edu Abstract This paper presents a simulation method using the commercial light field camera Lytro, which allows
Ultra-shallow DoF imaging using faced paraboloidal mirrors
 Ultra-shallow DoF imaging using faced paraboloidal mirrors Ryoichiro Nishi, Takahito Aoto, Norihiko Kawai, Tomokazu Sato, Yasuhiro Mukaigawa, Naokazu Yokoya Graduate School of Information Science, Nara
Ultra-shallow DoF imaging using faced paraboloidal mirrors Ryoichiro Nishi, Takahito Aoto, Norihiko Kawai, Tomokazu Sato, Yasuhiro Mukaigawa, Naokazu Yokoya Graduate School of Information Science, Nara
Improving Film-Like Photography. aka, Epsilon Photography
 Improving Film-Like Photography aka, Epsilon Photography Ankit Mohan Courtesy of Ankit Mohan. Used with permission. Film-like like Optics: Imaging Intuition Angle(θ,ϕ) Ray Center of Projection Position
Improving Film-Like Photography aka, Epsilon Photography Ankit Mohan Courtesy of Ankit Mohan. Used with permission. Film-like like Optics: Imaging Intuition Angle(θ,ϕ) Ray Center of Projection Position
Image Formation III Chapter 1 (Forsyth&Ponce) Cameras Lenses & Sensors
 Cameras Lenses & Sensors") Image Formation III Chapter 1 (Forsyth&Ponce) Cameras Lenses & Sensors Guido Gerig CS-GY 6643, Spring 2017 (slides modified from Marc Pollefeys, UNC Chapel Hill/ ETH Zurich, With content from Prof. Trevor
Image Formation III Chapter 1 (Forsyth&Ponce) Cameras Lenses & Sensors Guido Gerig CS-GY 6643, Spring 2017 (slides modified from Marc Pollefeys, UNC Chapel Hill/ ETH Zurich, With content from Prof. Trevor
Single-shot three-dimensional imaging of dilute atomic clouds
 Calhoun: The NPS Institutional Archive Faculty and Researcher Publications Funded by Naval Postgraduate School 2014 Single-shot three-dimensional imaging of dilute atomic clouds Sakmann, Kaspar http://hdl.handle.net/10945/52399
Calhoun: The NPS Institutional Archive Faculty and Researcher Publications Funded by Naval Postgraduate School 2014 Single-shot three-dimensional imaging of dilute atomic clouds Sakmann, Kaspar http://hdl.handle.net/10945/52399
Cameras. Steve Rotenberg CSE168: Rendering Algorithms UCSD, Spring 2017
 Cameras Steve Rotenberg CSE168: Rendering Algorithms UCSD, Spring 2017 Camera Focus Camera Focus So far, we have been simulating pinhole cameras with perfect focus Often times, we want to simulate more
Cameras Steve Rotenberg CSE168: Rendering Algorithms UCSD, Spring 2017 Camera Focus Camera Focus So far, we have been simulating pinhole cameras with perfect focus Often times, we want to simulate more
Implementation of Adaptive Coded Aperture Imaging using a Digital Micro-Mirror Device for Defocus Deblurring
 Implementation of Adaptive Coded Aperture Imaging using a Digital Micro-Mirror Device for Defocus Deblurring Ashill Chiranjan and Bernardt Duvenhage Defence, Peace, Safety and Security Council for Scientific
Implementation of Adaptive Coded Aperture Imaging using a Digital Micro-Mirror Device for Defocus Deblurring Ashill Chiranjan and Bernardt Duvenhage Defence, Peace, Safety and Security Council for Scientific
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 5: Cameras and Projection Szeliski 2.1.3-2.1.6 Reading Announcements Project 1 assigned, see projects page: http://www.cs.cornell.edu/courses/cs6670/2011sp/projects/projects.html
CS6670: Computer Vision Noah Snavely Lecture 5: Cameras and Projection Szeliski 2.1.3-2.1.6 Reading Announcements Project 1 assigned, see projects page: http://www.cs.cornell.edu/courses/cs6670/2011sp/projects/projects.html
Basic principles of photography. David Capel 346B IST
 Basic principles of photography David Capel 346B IST Latin Camera Obscura = Dark Room Light passing through a small hole produces an inverted image on the opposite wall Safely observing the solar eclipse
Basic principles of photography David Capel 346B IST Latin Camera Obscura = Dark Room Light passing through a small hole produces an inverted image on the opposite wall Safely observing the solar eclipse
Modeling the calibration pipeline of the Lytro camera for high quality light-field image reconstruction
 2013 IEEE International Conference on Computer Vision Modeling the calibration pipeline of the Lytro camera for high quality light-field image reconstruction Donghyeon Cho Minhaeng Lee Sunyeong Kim Yu-Wing
2013 IEEE International Conference on Computer Vision Modeling the calibration pipeline of the Lytro camera for high quality light-field image reconstruction Donghyeon Cho Minhaeng Lee Sunyeong Kim Yu-Wing
Computer Vision. The Pinhole Camera Model
 Computer Vision The Pinhole Camera Model Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2017/2018 Imaging device
Computer Vision The Pinhole Camera Model Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2017/2018 Imaging device
6.A44 Computational Photography
 Add date: Friday 6.A44 Computational Photography Depth of Field Frédo Durand We allow for some tolerance What happens when we close the aperture by two stop? Aperture diameter is divided by two is doubled
Add date: Friday 6.A44 Computational Photography Depth of Field Frédo Durand We allow for some tolerance What happens when we close the aperture by two stop? Aperture diameter is divided by two is doubled
The Camera : Computational Photography Alexei Efros, CMU, Fall 2005
 The Camera 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 How do we see the world? object film Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable
The Camera 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 How do we see the world? object film Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable
Lytro camera technology: theory, algorithms, performance analysis
 Lytro camera technology: theory, algorithms, performance analysis Todor Georgiev a, Zhan Yu b, Andrew Lumsdaine c, Sergio Goma a a Qualcomm; b University of Delaware; c Indiana University ABSTRACT The
Lytro camera technology: theory, algorithms, performance analysis Todor Georgiev a, Zhan Yu b, Andrew Lumsdaine c, Sergio Goma a a Qualcomm; b University of Delaware; c Indiana University ABSTRACT The
What will be on the midterm?
 What will be on the midterm? CS 178, Spring 2014 Marc Levoy Computer Science Department Stanford University General information 2 Monday, 7-9pm, Cubberly Auditorium (School of Edu) closed book, no notes
What will be on the midterm? CS 178, Spring 2014 Marc Levoy Computer Science Department Stanford University General information 2 Monday, 7-9pm, Cubberly Auditorium (School of Edu) closed book, no notes
Why is sports photography hard?
 Why is sports photography hard? (and what we can do about it using computational photography) CS 178, Spring 2014 Marc Levoy Computer Science Department Stanford University Sports photography operates
Why is sports photography hard? (and what we can do about it using computational photography) CS 178, Spring 2014 Marc Levoy Computer Science Department Stanford University Sports photography operates
Deconvolution , , Computational Photography Fall 2018, Lecture 12
 Deconvolution http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 12 Course announcements Homework 3 is out. - Due October 12 th. - Any questions?
Deconvolution http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 12 Course announcements Homework 3 is out. - Due October 12 th. - Any questions?
Demosaicing and Denoising on Simulated Light Field Images
 Demosaicing and Denoising on Simulated Light Field Images Trisha Lian Stanford University tlian@stanford.edu Kyle Chiang Stanford University kchiang@stanford.edu Abstract Light field cameras use an array
Demosaicing and Denoising on Simulated Light Field Images Trisha Lian Stanford University tlian@stanford.edu Kyle Chiang Stanford University kchiang@stanford.edu Abstract Light field cameras use an array
A 3D Multi-Aperture Image Sensor Architecture
 A 3D Multi-Aperture Image Sensor Architecture Keith Fife, Abbas El Gamal and H.-S. Philip Wong Department of Electrical Engineering Stanford University Outline Multi-Aperture system overview Sensor architecture
A 3D Multi-Aperture Image Sensor Architecture Keith Fife, Abbas El Gamal and H.-S. Philip Wong Department of Electrical Engineering Stanford University Outline Multi-Aperture system overview Sensor architecture
Lecture 22: Cameras & Lenses III. Computer Graphics and Imaging UC Berkeley CS184/284A, Spring 2017
 Lecture 22: Cameras & Lenses III Computer Graphics and Imaging UC Berkeley, Spring 2017 F-Number For Lens vs. Photo A lens s F-Number is the maximum for that lens E.g. 50 mm F/1.4 is a high-quality telephoto
Lecture 22: Cameras & Lenses III Computer Graphics and Imaging UC Berkeley, Spring 2017 F-Number For Lens vs. Photo A lens s F-Number is the maximum for that lens E.g. 50 mm F/1.4 is a high-quality telephoto
CS354 Computer Graphics Computational Photography. Qixing Huang April 23 th 2018
 CS354 Computer Graphics Computational Photography Qixing Huang April 23 th 2018 Background Sales of digital cameras surpassed sales of film cameras in 2004 Digital Cameras Free film Instant display Quality
CS354 Computer Graphics Computational Photography Qixing Huang April 23 th 2018 Background Sales of digital cameras surpassed sales of film cameras in 2004 Digital Cameras Free film Instant display Quality
Tomorrow s Digital Photography
 Tomorrow s Digital Photography Gerald Peter Vienna University of Technology Figure 1: a) - e): A series of photograph with five different exposures. f) In the high dynamic range image generated from a)
Tomorrow s Digital Photography Gerald Peter Vienna University of Technology Figure 1: a) - e): A series of photograph with five different exposures. f) In the high dynamic range image generated from a)
The Camera : Computational Photography Alexei Efros, CMU, Fall 2008
 The Camera 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 How do we see the world? object film Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable
The Camera 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 How do we see the world? object film Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable
Unit 1: Image Formation
 Unit 1: Image Formation 1. Geometry 2. Optics 3. Photometry 4. Sensor Readings Szeliski 2.1-2.3 & 6.3.5 1 Physical parameters of image formation Geometric Type of projection Camera pose Optical Sensor
Unit 1: Image Formation 1. Geometry 2. Optics 3. Photometry 4. Sensor Readings Szeliski 2.1-2.3 & 6.3.5 1 Physical parameters of image formation Geometric Type of projection Camera pose Optical Sensor
Image Formation and Camera Design
 Image Formation and Camera Design Spring 2003 CMSC 426 Jan Neumann 2/20/03 Light is all around us! From London & Upton, Photography Conventional camera design... Ken Kay, 1969 in Light & Film, TimeLife
Image Formation and Camera Design Spring 2003 CMSC 426 Jan Neumann 2/20/03 Light is all around us! From London & Upton, Photography Conventional camera design... Ken Kay, 1969 in Light & Film, TimeLife
Adding Realistic Camera Effects to the Computer Graphics Camera Model
 Adding Realistic Camera Effects to the Computer Graphics Camera Model Ryan Baltazar May 4, 2012 1 Introduction The camera model traditionally used in computer graphics is based on the camera obscura or
Adding Realistic Camera Effects to the Computer Graphics Camera Model Ryan Baltazar May 4, 2012 1 Introduction The camera model traditionally used in computer graphics is based on the camera obscura or
Digital Photography and Geometry Capture. NBAY 6120 March 9, 2016 Donald P. Greenberg Lecture 4
 Digital Photography and Geometry Capture NBAY 6120 March 9, 2016 Donald P. Greenberg Lecture 4 Required Reading Bilger, Burkhard. "Has the Self-Driving Car Arrived at Last?" The New Yorker. N.p., 25 Nov.
Digital Photography and Geometry Capture NBAY 6120 March 9, 2016 Donald P. Greenberg Lecture 4 Required Reading Bilger, Burkhard. "Has the Self-Driving Car Arrived at Last?" The New Yorker. N.p., 25 Nov.
Dictionary Learning based Color Demosaicing for Plenoptic Cameras
 Dictionary Learning based Color Demosaicing for Plenoptic Cameras Xiang Huang Northwestern University Evanston, IL, USA xianghuang@gmail.com Oliver Cossairt Northwestern University Evanston, IL, USA ollie@eecs.northwestern.edu
Dictionary Learning based Color Demosaicing for Plenoptic Cameras Xiang Huang Northwestern University Evanston, IL, USA xianghuang@gmail.com Oliver Cossairt Northwestern University Evanston, IL, USA ollie@eecs.northwestern.edu
Observational Astronomy
 Observational Astronomy Instruments The telescope- instruments combination forms a tightly coupled system: Telescope = collecting photons and forming an image Instruments = registering and analyzing the
Observational Astronomy Instruments The telescope- instruments combination forms a tightly coupled system: Telescope = collecting photons and forming an image Instruments = registering and analyzing the
Deconvolution , , Computational Photography Fall 2017, Lecture 17
 Deconvolution http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 17 Course announcements Homework 4 is out. - Due October 26 th. - There was another
Deconvolution http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 17 Course announcements Homework 4 is out. - Due October 26 th. - There was another
Development of airborne light field photography
 University of Iowa Iowa Research Online Theses and Dissertations Spring 2015 Development of airborne light field photography Michael Dominick Yocius University of Iowa Copyright 2015 Michael Dominick Yocius
University of Iowa Iowa Research Online Theses and Dissertations Spring 2015 Development of airborne light field photography Michael Dominick Yocius University of Iowa Copyright 2015 Michael Dominick Yocius
Burst Photography! EE367/CS448I: Computational Imaging and Display! stanford.edu/class/ee367! Lecture 7! Gordon Wetzstein! Stanford University!
 Burst Photography! EE367/CS448I: Computational Imaging and Display! stanford.edu/class/ee367! Lecture 7! Gordon Wetzstein! Stanford University! Motivation! wikipedia! exposure sequence! -4 stops! Motivation!
Burst Photography! EE367/CS448I: Computational Imaging and Display! stanford.edu/class/ee367! Lecture 7! Gordon Wetzstein! Stanford University! Motivation! wikipedia! exposure sequence! -4 stops! Motivation!
VC 11/12 T2 Image Formation
 VC 11/12 T2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
VC 11/12 T2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
Deblurring. Basics, Problem definition and variants
 Deblurring Basics, Problem definition and variants Kinds of blur Hand-shake Defocus Credit: Kenneth Josephson Motion Credit: Kenneth Josephson Kinds of blur Spatially invariant vs. Spatially varying
Deblurring Basics, Problem definition and variants Kinds of blur Hand-shake Defocus Credit: Kenneth Josephson Motion Credit: Kenneth Josephson Kinds of blur Spatially invariant vs. Spatially varying
Lenses and Focal Length
 Task 2 Lenses and Focal Length During this task we will be exploring how a change in lens focal length can alter the way that the image is recorded on the film. To gain a better understanding before you
Task 2 Lenses and Focal Length During this task we will be exploring how a change in lens focal length can alter the way that the image is recorded on the film. To gain a better understanding before you
Full Resolution Lightfield Rendering
 Full Resolution Lightfield Rendering Andrew Lumsdaine Indiana University lums@cs.indiana.edu Todor Georgiev Adobe Systems tgeorgie@adobe.com Figure 1: Example of lightfield, normally rendered image, and
Full Resolution Lightfield Rendering Andrew Lumsdaine Indiana University lums@cs.indiana.edu Todor Georgiev Adobe Systems tgeorgie@adobe.com Figure 1: Example of lightfield, normally rendered image, and
Less Is More: Coded Computational Photography
 Less Is More: Coded Computational Photography Ramesh Raskar Mitsubishi Electric Research Labs (MERL), Cambridge, MA, USA Abstract. Computational photography combines plentiful computing, digital sensors,
Less Is More: Coded Computational Photography Ramesh Raskar Mitsubishi Electric Research Labs (MERL), Cambridge, MA, USA Abstract. Computational photography combines plentiful computing, digital sensors,
Projection. Readings. Szeliski 2.1. Wednesday, October 23, 13
 Projection Readings Szeliski 2.1 Projection Readings Szeliski 2.1 Müller-Lyer Illusion by Pravin Bhat Müller-Lyer Illusion by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html Müller-Lyer
Projection Readings Szeliski 2.1 Projection Readings Szeliski 2.1 Müller-Lyer Illusion by Pravin Bhat Müller-Lyer Illusion by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html Müller-Lyer
multiframe visual-inertial blur estimation and removal for unmodified smartphones
 multiframe visual-inertial blur estimation and removal for unmodified smartphones, Severin Münger, Carlo Beltrame, Luc Humair WSCG 2015, Plzen, Czech Republic images taken by non-professional photographers
multiframe visual-inertial blur estimation and removal for unmodified smartphones, Severin Münger, Carlo Beltrame, Luc Humair WSCG 2015, Plzen, Czech Republic images taken by non-professional photographers
DSLR Cameras have a wide variety of lenses that can be used.
 Chapter 8-Lenses DSLR Cameras have a wide variety of lenses that can be used. The camera lens is very important in making great photographs. It controls what the sensor sees, how much of the scene is included,
Chapter 8-Lenses DSLR Cameras have a wide variety of lenses that can be used. The camera lens is very important in making great photographs. It controls what the sensor sees, how much of the scene is included,
Announcement A total of 5 (five) late days are allowed for projects. Office hours
 late days are allowed for projects. Office hours") Announcement A total of 5 (five) late days are allowed for projects. Office hours Me: 3:50-4:50pm Thursday (or by appointment) Jake: 12:30-1:30PM Monday and Wednesday Image Formation Digital Camera Film
Announcement A total of 5 (five) late days are allowed for projects. Office hours Me: 3:50-4:50pm Thursday (or by appointment) Jake: 12:30-1:30PM Monday and Wednesday Image Formation Digital Camera Film
Computational Photography: Illumination Part 2. Brown 1
 Computational Photography: Illumination Part 2 Brown 1 Lecture Topic Discuss ways to use illumination with further processing Three examples: 1. Flash/No-flash imaging for low-light photography (As well
Computational Photography: Illumination Part 2 Brown 1 Lecture Topic Discuss ways to use illumination with further processing Three examples: 1. Flash/No-flash imaging for low-light photography (As well
Flash Photography: 1
 Flash Photography: 1 Lecture Topic Discuss ways to use illumination with further processing Three examples: 1. Flash/No-flash imaging for low-light photography (As well as an extension using a non-visible
Flash Photography: 1 Lecture Topic Discuss ways to use illumination with further processing Three examples: 1. Flash/No-flash imaging for low-light photography (As well as an extension using a non-visible
Applications of Flash and No-Flash Image Pairs in Mobile Phone Photography
 Applications of Flash and No-Flash Image Pairs in Mobile Phone Photography Xi Luo Stanford University 450 Serra Mall, Stanford, CA 94305 xluo2@stanford.edu Abstract The project explores various application
Applications of Flash and No-Flash Image Pairs in Mobile Phone Photography Xi Luo Stanford University 450 Serra Mall, Stanford, CA 94305 xluo2@stanford.edu Abstract The project explores various application
Cameras and Sensors. Today. Today. It receives light from all directions. BIL721: Computational Photography! Spring 2015, Lecture 2!
 !! Cameras and Sensors Today Pinhole camera! Lenses! Exposure! Sensors! photo by Abelardo Morell BIL721: Computational Photography! Spring 2015, Lecture 2! Aykut Erdem! Hacettepe University! Computer Vision
!! Cameras and Sensors Today Pinhole camera! Lenses! Exposure! Sensors! photo by Abelardo Morell BIL721: Computational Photography! Spring 2015, Lecture 2! Aykut Erdem! Hacettepe University! Computer Vision
Lecture 30: Image Sensors (Cont) Computer Graphics and Imaging UC Berkeley CS184/284A
 Computer Graphics and Imaging UC Berkeley CS184/284A") Lecture 30: Image Sensors (Cont) Computer Graphics and Imaging UC Berkeley Reminder: The Pixel Stack Microlens array Color Filter Anti-Reflection Coating Stack height 4um is typical Pixel size 2um is typical
Lecture 30: Image Sensors (Cont) Computer Graphics and Imaging UC Berkeley Reminder: The Pixel Stack Microlens array Color Filter Anti-Reflection Coating Stack height 4um is typical Pixel size 2um is typical
Agenda. Fusion and Reconstruction. Image Fusion & Reconstruction. Image Fusion & Reconstruction. Dr. Yossi Rubner.
 Fusion and Reconstruction Dr. Yossi Rubner yossi@rubner.co.il Some slides stolen from: Jack Tumblin 1 Agenda We ve seen Panorama (from different FOV) Super-resolution (from low-res) HDR (from different
Fusion and Reconstruction Dr. Yossi Rubner yossi@rubner.co.il Some slides stolen from: Jack Tumblin 1 Agenda We ve seen Panorama (from different FOV) Super-resolution (from low-res) HDR (from different
Depth Estimation Algorithm for Color Coded Aperture Camera
 Depth Estimation Algorithm for Color Coded Aperture Camera Ivan Panchenko, Vladimir Paramonov and Victor Bucha; Samsung R&D Institute Russia; Moscow, Russia Abstract In this paper we present an algorithm
Depth Estimation Algorithm for Color Coded Aperture Camera Ivan Panchenko, Vladimir Paramonov and Victor Bucha; Samsung R&D Institute Russia; Moscow, Russia Abstract In this paper we present an algorithm
IMAGE FORMATION. Light source properties. Sensor characteristics Surface. Surface reflectance properties. Optics
 IMAGE FORMATION Light source properties Sensor characteristics Surface Exposure shape Optics Surface reflectance properties ANALOG IMAGES An image can be understood as a 2D light intensity function f(x,y)
IMAGE FORMATION Light source properties Sensor characteristics Surface Exposure shape Optics Surface reflectance properties ANALOG IMAGES An image can be understood as a 2D light intensity function f(x,y)
Coded Aperture for Projector and Camera for Robust 3D measurement
 Coded Aperture for Projector and Camera for Robust 3D measurement Yuuki Horita Yuuki Matugano Hiroki Morinaga Hiroshi Kawasaki Satoshi Ono Makoto Kimura Yasuo Takane Abstract General active 3D measurement
Coded Aperture for Projector and Camera for Robust 3D measurement Yuuki Horita Yuuki Matugano Hiroki Morinaga Hiroshi Kawasaki Satoshi Ono Makoto Kimura Yasuo Takane Abstract General active 3D measurement
Topic 6 - Optics Depth of Field and Circle Of Confusion
 Topic 6 - Optics Depth of Field and Circle Of Confusion Learning Outcomes In this lesson, we will learn all about depth of field and a concept known as the Circle of Confusion. By the end of this lesson,
Topic 6 - Optics Depth of Field and Circle Of Confusion Learning Outcomes In this lesson, we will learn all about depth of field and a concept known as the Circle of Confusion. By the end of this lesson,
Single-view Metrology and Cameras
 Single-view Metrology and Cameras 10/10/17 Computational Photography Derek Hoiem, University of Illinois Project 2 Results Incomplete list of great project pages Haohang Huang: Best presented project;
Single-view Metrology and Cameras 10/10/17 Computational Photography Derek Hoiem, University of Illinois Project 2 Results Incomplete list of great project pages Haohang Huang: Best presented project;
Lecture 21: Cameras & Lenses II. Computer Graphics and Imaging UC Berkeley CS184/284A
 Lecture 21: Cameras & Lenses II Computer Graphics and Imaging UC Berkeley Real Lens Designs Are Highly Complex [Apple] Topic o next lecture Real Lens Elements Are Not Ideal Aberrations Real plano-convex
Lecture 21: Cameras & Lenses II Computer Graphics and Imaging UC Berkeley Real Lens Designs Are Highly Complex [Apple] Topic o next lecture Real Lens Elements Are Not Ideal Aberrations Real plano-convex
Active Aperture Control and Sensor Modulation for Flexible Imaging
 Active Aperture Control and Sensor Modulation for Flexible Imaging Chunyu Gao and Narendra Ahuja Department of Electrical and Computer Engineering, University of Illinois at Urbana-Champaign, Urbana, IL,
Active Aperture Control and Sensor Modulation for Flexible Imaging Chunyu Gao and Narendra Ahuja Department of Electrical and Computer Engineering, University of Illinois at Urbana-Champaign, Urbana, IL,
Overview. Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image
 Camera & Color Overview Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image Book: Hartley 6.1, Szeliski 2.1.5, 2.2, 2.3 The trip
Camera & Color Overview Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image Book: Hartley 6.1, Szeliski 2.1.5, 2.2, 2.3 The trip
Systems Biology. Optical Train, Köhler Illumination
 McGill University Life Sciences Complex Imaging Facility Systems Biology Microscopy Workshop Tuesday December 7 th, 2010 Simple Lenses, Transmitted Light Optical Train, Köhler Illumination What Does a
McGill University Life Sciences Complex Imaging Facility Systems Biology Microscopy Workshop Tuesday December 7 th, 2010 Simple Lenses, Transmitted Light Optical Train, Köhler Illumination What Does a
arxiv: v2 [cs.gr] 7 Dec 2015
![arxiv: v2 [cs.gr] 7 Dec 2015](/thumbs/74/71104517.jpg "arxiv: v2 [cs.gr] 7 Dec 2015") Light-Field Microscopy with a Consumer Light-Field Camera Lois Mignard-Debise INRIA, LP2N Bordeaux, France http://manao.inria.fr/perso/ lmignard/ Ivo Ihrke INRIA, LP2N Bordeaux, France arxiv:1508.03590v2
Light-Field Microscopy with a Consumer Light-Field Camera Lois Mignard-Debise INRIA, LP2N Bordeaux, France http://manao.inria.fr/perso/ lmignard/ Ivo Ihrke INRIA, LP2N Bordeaux, France arxiv:1508.03590v2
Cameras. Outline. Pinhole camera. Camera trial #1. Pinhole camera Film camera Digital camera Video camera
 Outline Cameras Pinhole camera Film camera Digital camera Video camera Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/3/6 with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros
Outline Cameras Pinhole camera Film camera Digital camera Video camera Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/3/6 with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros
Projection. Projection. Image formation. Müller-Lyer Illusion. Readings. Readings. Let s design a camera. Szeliski 2.1. Szeliski 2.
 Projection Projection Readings Szeliski 2.1 Readings Szeliski 2.1 Müller-Lyer Illusion Image formation object film by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html Let s design a camera
Projection Projection Readings Szeliski 2.1 Readings Szeliski 2.1 Müller-Lyer Illusion Image formation object film by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html Let s design a camera
Image Formation. Dr. Gerhard Roth. COMP 4102A Winter 2015 Version 3
 Image Formation Dr. Gerhard Roth COMP 4102A Winter 2015 Version 3 1 Image Formation Two type of images Intensity image encodes light intensities (passive sensor) Range (depth) image encodes shape and distance
Image Formation Dr. Gerhard Roth COMP 4102A Winter 2015 Version 3 1 Image Formation Two type of images Intensity image encodes light intensities (passive sensor) Range (depth) image encodes shape and distance
6.098 Digital and Computational Photography Advanced Computational Photography. Bill Freeman Frédo Durand MIT - EECS
 6.098 Digital and Computational Photography 6.882 Advanced Computational Photography Bill Freeman Frédo Durand MIT - EECS Administrivia PSet 1 is out Due Thursday February 23 Digital SLR initiation? During
6.098 Digital and Computational Photography 6.882 Advanced Computational Photography Bill Freeman Frédo Durand MIT - EECS Administrivia PSet 1 is out Due Thursday February 23 Digital SLR initiation? During
Sampling and pixels. CS 178, Spring Marc Levoy Computer Science Department Stanford University. Begun 4/23, finished 4/25.
 Sampling and pixels CS 178, Spring 2013 Begun 4/23, finished 4/25. Marc Levoy Computer Science Department Stanford University Why study sampling theory? Why do I sometimes get moiré artifacts in my images?
Sampling and pixels CS 178, Spring 2013 Begun 4/23, finished 4/25. Marc Levoy Computer Science Department Stanford University Why study sampling theory? Why do I sometimes get moiré artifacts in my images?
Angle Sensitive Imaging: A New Paradigm for Light Field Imaging
 Angle Sensitive Imaging: A New Paradigm for Light Field Imaging VIGIL VARGHESE School of Electrical and Electronic Engineering A thesis submitted to the Nanyang Technological University in partial fulfillment
Angle Sensitive Imaging: A New Paradigm for Light Field Imaging VIGIL VARGHESE School of Electrical and Electronic Engineering A thesis submitted to the Nanyang Technological University in partial fulfillment
Two strategies for realistic rendering capture real world data synthesize from bottom up
 Recap from Wednesday Two strategies for realistic rendering capture real world data synthesize from bottom up Both have existed for 500 years. Both are successful. Attempts to take the best of both world
Recap from Wednesday Two strategies for realistic rendering capture real world data synthesize from bottom up Both have existed for 500 years. Both are successful. Attempts to take the best of both world
Intro to Virtual Reality (Cont)
") Lecture 37: Intro to Virtual Reality (Cont) Computer Graphics and Imaging UC Berkeley CS184/284A Overview of VR Topics Areas we will discuss over next few lectures VR Displays VR Rendering VR Imaging CS184/284A
Lecture 37: Intro to Virtual Reality (Cont) Computer Graphics and Imaging UC Berkeley CS184/284A Overview of VR Topics Areas we will discuss over next few lectures VR Displays VR Rendering VR Imaging CS184/284A
Understanding camera trade-offs through a Bayesian analysis of light field projections Anat Levin, William T. Freeman, and Fredo Durand
 Computer Science and Artificial Intelligence Laboratory Technical Report MIT-CSAIL-TR-2008-021 April 16, 2008 Understanding camera trade-offs through a Bayesian analysis of light field projections Anat
Computer Science and Artificial Intelligence Laboratory Technical Report MIT-CSAIL-TR-2008-021 April 16, 2008 Understanding camera trade-offs through a Bayesian analysis of light field projections Anat
Early art: events. Baroque art: portraits. Renaissance art: events. Being There: Capturing and Experiencing a Sense of Place
 Being There: Capturing and Experiencing a Sense of Place Early art: events Richard Szeliski Microsoft Research Symposium on Computational Photography and Video Lascaux Early art: events Early art: events
Being There: Capturing and Experiencing a Sense of Place Early art: events Richard Szeliski Microsoft Research Symposium on Computational Photography and Video Lascaux Early art: events Early art: events
Cameras. Digital Visual Effects, Spring 2008 Yung-Yu Chuang 2008/2/26. with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros
 Cameras Digital Visual Effects, Spring 2008 Yung-Yu Chuang 2008/2/26 with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros Camera trial #1 scene film Put a piece of film in front of
Cameras Digital Visual Effects, Spring 2008 Yung-Yu Chuang 2008/2/26 with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros Camera trial #1 scene film Put a piece of film in front of
VC 14/15 TP2 Image Formation
 VC 14/15 TP2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
VC 14/15 TP2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
Computational Illumination
 Computational Illumination Course WebPage : http://www.merl.com/people/raskar/photo/ Ramesh Raskar Mitsubishi Electric Research Labs Ramesh Raskar, Computational Illumination Computational Illumination
Computational Illumination Course WebPage : http://www.merl.com/people/raskar/photo/ Ramesh Raskar Mitsubishi Electric Research Labs Ramesh Raskar, Computational Illumination Computational Illumination
Raskar, Camera Culture, MIT Media Lab. Ramesh Raskar. Camera Culture. Associate Professor, MIT Media Lab
 Raskar, Camera Culture, MIT Media Lab Camera Culture Ramesh Raskar C C lt Camera Culture Associate Professor, MIT Media Lab Where are the camera s? Where are the camera s? We focus on creating tools to
Raskar, Camera Culture, MIT Media Lab Camera Culture Ramesh Raskar C C lt Camera Culture Associate Professor, MIT Media Lab Where are the camera s? Where are the camera s? We focus on creating tools to
Depth from Combining Defocus and Correspondence Using Light-Field Cameras
 2013 IEEE International Conference on Computer Vision Depth from Combining Defocus and Correspondence Using Light-Field Cameras Michael W. Tao 1, Sunil Hadap 2, Jitendra Malik 1, and Ravi Ramamoorthi 1
2013 IEEE International Conference on Computer Vision Depth from Combining Defocus and Correspondence Using Light-Field Cameras Michael W. Tao 1, Sunil Hadap 2, Jitendra Malik 1, and Ravi Ramamoorthi 1