Homogeneous Representation Representation of points & vectors. Properties. Homogeneous Transformations
|
|
|
- Noel Ferdinand McBride
- 6 years ago
- Views:
Transcription
1 From Last Class Homogeneous Transformations Combines Rotation + Translation into one single matri multiplication Composition of Homogeneous Transformations Homogeneous Representation Representation of points & vectors Properties. Sum & differences of vectors are vectors. Sum of a vector and a point is a point 3. Difference between two points is a vector 4. Sum of two points == meaningless Homogeneous Transformations C From Last Class Robot Velocit Kinematics Forward vs. Inverse Kinematics Holonomic vs. Non-holonomic Constraints Differential Drive Triccle Ackerman Steering A B 3 4
2 Robot Velocit Kinematics Forward Kinematics: Non-Holonomic Constraints The robot can reach everwhere in the configuration space, BUT, it is under-actuated, and thus the velocit is constrained. Inverse Kinematics: Testing for Integrabilit of Constraints Given a constraint in the form of Wh Not? The test: Let Not Straightforward then, if constraint can be integrated 5 6 Mobile Robot Drives Differential Steering Co-aial wheels Independentl driven Two-dimensional Non-holonomicall constrained Differential Steering: Forward Kinematics Given the robot geometr and wheel speeds, what is the robot s velocit? Let: r wheel radius Robot Position l ale length right wheel speed left wheel speed We want 7 8

3 Differential Steering: Forward Kinematics (cont.) Given the robot geometr and wheel speeds, what is the robot s velocit? Let: r wheel radius Goal l ale length right wheel speed left wheel speed Differential Steering Instantaneous Center of Curvature ICC Forward Velocit Angular Velocit 9 World Coordinates Differential Steering: Inverse Kinematics 3



4 Differential Steering Benefits Simple construction Zero minimum turning radius Drawbacks Small error in wheel speeds translates to large position errors Requires two drive motors Wheels-first is dnamicall unstable Triccle: Forward Kinematics Steerable powered front wheel Free-spinning rear wheels r front wheel radius d wheelbase front wheel speed Forward Velocit Angular Velocit d 3 4 Triccle: Instantaneous Center of Curvature Triccle: Inverse Kinematics What wheel speed and angle are necessar to produce a desired robot velocit? d d 5 6 4



5 Triccle Mobile Robotics Benefits Does not require accurate speed matching Drawbacks Non-zero minimum turning radius More complicated powertrain OBSERVE ORIENT DECIDE & ACT Perception Localization Control 7 8 Sensing Light Pinhole Camera How do we see the world? sun Place a piece of film in front of an object, can we get a reasonable image? Let s add a barrier, w/ a *VERY* small opening. Purpose: To block off most of the light ras Reduces blurring The opening is known as aperture What happens to the image? 9 5

 The image is formed on the Image Plane")


6 Pinhole Camera Home-made Pinhole Camera Pinhole Model: Captures pencil of ras all ras through a single point This point is called Center of Projection (COP) The image is formed on the Image Plane Effective focal length, f, is the distance from COP to the Image Plane Wh so blurr? Camera w/ Lense Anatom of a modern camera Sensor Arras Purpose for the lens: Ideal Pinhole Model is unattainable; light gathering mechanism Keep image in sharp focus CMOS sensor 3 4 6
 Normal Resolution of a CCD sensor size of the scene element that images to a")

7 Images are formed b the interaction of the incident image irradiance with light sensitive elements on the image plane Light sensitive elements Film Charge Coupled Device (CCD) CMOS imaging element Image Sensors Resolution Refers to the precision of the sensor in making measurements (different formal definitions eists) Normal Resolution of a CCD sensor size of the scene element that images to a single piel on the image plane Resolution of a digital image the dimension (in piels) of the digital image. Forsthe & Ponce 5 6 Digital Imaging Sstems CCD or CMOS imaging arra When light falls on the cells in these arras a charge accumulates which is proportional to the incident light energ A/D conversion unit Host Computer Digital Snapshots A digital image is an arra of numbers indicating the image irradiance at various points on the image Image intensities are spatiall sampled Intensit values are quantized (8-bits, -bits, -bits, etc) Video Imager For a video camera, Images are taken sequentiall b opening and close the shutter 3/sec (i.e. 3 frames/sec) 7 8 7
 Picture Function Binar Image B(r,c)")



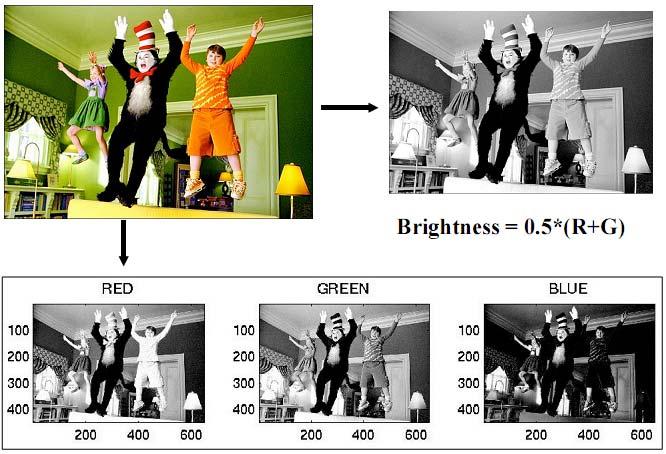
8 Tpes of Images Analog Image A(,) Digital Image I(r,c) Grascale Image monochrome digital image G(r,c) Picture Function Multi-spectral Image color digital image M(r,c) Picture Function Binar Image B(r,c) Picture Function Labeled Image L(r,c) Picture Function Sensing Color In a 3-CCD video camera the light path is split 3 was which are passed through colored light filters and then imaged As a result a color image contains three channels of information: red, green, and blue image intensities In a -CCD color camera color information is obtained b converting the individual elements with a spatiall varing pattern of filters, RGB Baer pattern used to capture color images on a single imaging surface 9 3 Practical Color Sensing: Baer Grid Images in a Computer An image is a -D table of numbers or D Matri

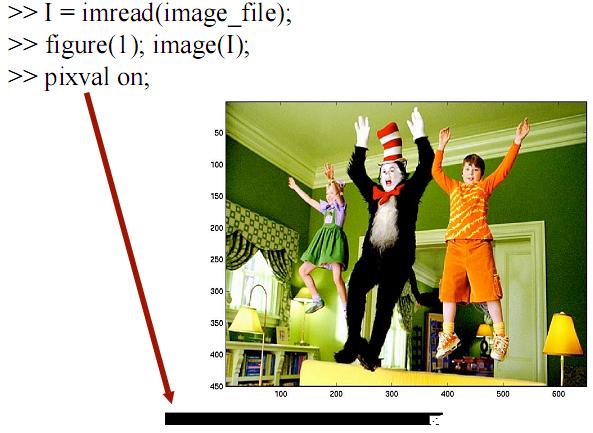
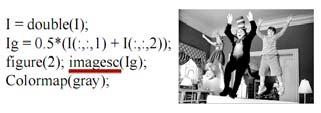

9 Eample



10 A word of caution For this class, image processing in Matlab Matlab etremel powerful in terms of matri manipulation and signal processing Implementation in MatLab vs. in C/C++/Java NOT EQUAL!! Dimensionalit Reduction Machine (3D => D) Funn things happen Parallel lines are not. Figures Steven E. Palmer, What have we lost? Angles Distances (lengths) Distances can t be trusted 39 4

 film, this effectivel increases the")
 Size")
11 FOV Depends on Focal Length Conversion from mm to piels In the digital camera, measurements are made in image piels. Need to convert the focal length (in mm) to piels. Tpical digital sensors are smaller than (35 mm) film, this effectivel increases the focal length Size of field of view governed b the size of the image plane: Smaller FOV = larger Focal Length 4 4 FOV Depends on Focal Length Field of View (Zoom) Size of field of view governed b the size of the image plane: Smaller FOV = larger Focal Length 43 44


12 FOV Depends on Focal Length Filed of View (Zoom) Size of field of view governed b the size of the image plane: Smaller FOV = larger Focal Length FOV Depends on Focal Length Field of View/Focal Length Size of field of view governed b the size of the image plane: Large FOV, small f Camera closer to car Small FOV, large f Camera far from car Smaller FOV = larger Focal Length 47 48


13 Large Focal Length Compresses Depth 49 5 Image Projection Modeling (pinhole) projection Projection Equations The coordinate sstem Use the pinhole model as an approimation Put the optical center (COP) at origin Put image plane (Projection Plane, PP) in front of the COP Wh? The camera looks down the negative z-ais Required for right-handed coordinates Note: and are colinear Given then 5 5 3
14 Images in a Computer An image is a -D table of numbers or D Matri Binar Image Analsis Binar Image Image w/ onl and as entries Notation: B denotes the binar image B[r,c] denotes a piel in the image B[,] upper leftmost piel Neighborhoods 4 Neighborhood N NW N 8 Neighborhood W * E W * S SW S NE E SE How would ou convert an image into a Binar Image? Appling Masks to Images Convolution of the Image w/ another Signal Masks have origins Smmetric masks origins are the center piels
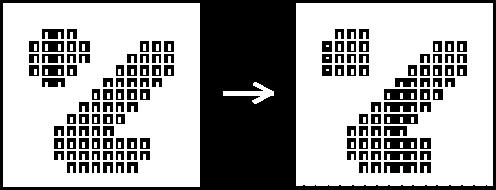
15 Connected Components Labeling Segmentation Recursive Labeling Algorithm Let I denote the image. Step : Convert I to B, Step : Let B = - B, label = for i = :rows for j = :columns if B (i,j) == - label = label + ; Add (i,j) onto Stack and set B (i,j) = label; ? 9? end end while (Stack is not empt) Remove piel P from Stack Let M = neighbors of P whose piel value = -; Add M onto Stack; Set B (M) = label; end Algorithm Pictoriall Result (3,) (3,) (3,3) (,3)
")
 DISK(5) RING(5)")


16 Morphological Operators Structuring Elements (S) Morphological Operators Dilation: Minkowski addition BOX(3,5) DISK(5) RING(5) Basic Operators Translation X t of a set of piels b a position vector t is given b X t = {+t X} 6 6 Morphological Operators Morphological Operators Erosion: Opening:


 Histograms use hist(values, binnumber)")
17 Closing: Morphological Operators Region Properties Area Total # of piels in the region of interest Centroid Perimeter Circularit Mean Radial Distance Standard Deviation/Variance of Radial Distance Bounding Bo & Etremal Points Spatial Moments Ellipse Properties Thresholding & Histograms Thresholding: Manual For grascale images G, in Matlab G > epsilon Automatic Otsu Method (See Shapiro & Stockman) Histograms use hist(values, binnumber) in Matlab 67 7
MEM455/800 Robotics II/Advance Robotics Winter 2009
 Admin Stuff Course Website: http://robotics.mem.drexel.edu/mhsieh/courses/mem456/ MEM455/8 Robotics II/Advance Robotics Winter 9 Professor: Ani Hsieh Time: :-:pm Tues, Thurs Location: UG Lab, Classroom
Admin Stuff Course Website: http://robotics.mem.drexel.edu/mhsieh/courses/mem456/ MEM455/8 Robotics II/Advance Robotics Winter 9 Professor: Ani Hsieh Time: :-:pm Tues, Thurs Location: UG Lab, Classroom
Image Processing & Projective geometry
 Image Processing & Projective geometry Arunkumar Byravan Partial slides borrowed from Jianbo Shi & Steve Seitz Color spaces RGB Red, Green, Blue HSV Hue, Saturation, Value Why HSV? HSV separates luma,
Image Processing & Projective geometry Arunkumar Byravan Partial slides borrowed from Jianbo Shi & Steve Seitz Color spaces RGB Red, Green, Blue HSV Hue, Saturation, Value Why HSV? HSV separates luma,
Unit 1: Image Formation
 Unit 1: Image Formation 1. Geometry 2. Optics 3. Photometry 4. Sensor Readings Szeliski 2.1-2.3 & 6.3.5 1 Physical parameters of image formation Geometric Type of projection Camera pose Optical Sensor
Unit 1: Image Formation 1. Geometry 2. Optics 3. Photometry 4. Sensor Readings Szeliski 2.1-2.3 & 6.3.5 1 Physical parameters of image formation Geometric Type of projection Camera pose Optical Sensor
Image formation - Cameras. Grading & Project. About the course. Tentative Schedule. Course Content. Students introduction
 About the course Instructors: Haibin Ling (hbling@temple, Wachman 35) Hours Lecture: Tuesda 5:3-8:pm, TTLMAN 43B Office hour: Tuesda 3: - 5:pm, or b appointment Textbook Computer Vision: Models, Learning,
About the course Instructors: Haibin Ling (hbling@temple, Wachman 35) Hours Lecture: Tuesda 5:3-8:pm, TTLMAN 43B Office hour: Tuesda 3: - 5:pm, or b appointment Textbook Computer Vision: Models, Learning,
Overview. Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image
 Camera & Color Overview Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image Book: Hartley 6.1, Szeliski 2.1.5, 2.2, 2.3 The trip
Camera & Color Overview Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image Book: Hartley 6.1, Szeliski 2.1.5, 2.2, 2.3 The trip
How do we see the world?
 The Camera 1 How do we see the world? Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable image? Credit: Steve Seitz 2 Pinhole camera Idea 2: Add a barrier to
The Camera 1 How do we see the world? Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable image? Credit: Steve Seitz 2 Pinhole camera Idea 2: Add a barrier to
ME 6406 MACHINE VISION. Georgia Institute of Technology
 ME 6406 MACHINE VISION Georgia Institute of Technology Class Information Instructor Professor Kok-Meng Lee MARC 474 Office hours: Tues/Thurs 1:00-2:00 pm kokmeng.lee@me.gatech.edu (404)-894-7402 Class
ME 6406 MACHINE VISION Georgia Institute of Technology Class Information Instructor Professor Kok-Meng Lee MARC 474 Office hours: Tues/Thurs 1:00-2:00 pm kokmeng.lee@me.gatech.edu (404)-894-7402 Class
IMAGE FORMATION. Light source properties. Sensor characteristics Surface. Surface reflectance properties. Optics
 IMAGE FORMATION Light source properties Sensor characteristics Surface Exposure shape Optics Surface reflectance properties ANALOG IMAGES An image can be understood as a 2D light intensity function f(x,y)
IMAGE FORMATION Light source properties Sensor characteristics Surface Exposure shape Optics Surface reflectance properties ANALOG IMAGES An image can be understood as a 2D light intensity function f(x,y)
The Camera : Computational Photography Alexei Efros, CMU, Fall 2005
 The Camera 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 How do we see the world? object film Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable
The Camera 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 How do we see the world? object film Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable
Two strategies for realistic rendering capture real world data synthesize from bottom up
 Recap from Wednesday Two strategies for realistic rendering capture real world data synthesize from bottom up Both have existed for 500 years. Both are successful. Attempts to take the best of both world
Recap from Wednesday Two strategies for realistic rendering capture real world data synthesize from bottom up Both have existed for 500 years. Both are successful. Attempts to take the best of both world
Image Formation. Dr. Gerhard Roth. COMP 4102A Winter 2015 Version 3
 Image Formation Dr. Gerhard Roth COMP 4102A Winter 2015 Version 3 1 Image Formation Two type of images Intensity image encodes light intensities (passive sensor) Range (depth) image encodes shape and distance
Image Formation Dr. Gerhard Roth COMP 4102A Winter 2015 Version 3 1 Image Formation Two type of images Intensity image encodes light intensities (passive sensor) Range (depth) image encodes shape and distance
Image Formation. Dr. Gerhard Roth. COMP 4102A Winter 2014 Version 1
 Image Formation Dr. Gerhard Roth COMP 4102A Winter 2014 Version 1 Image Formation Two type of images Intensity image encodes light intensities (passive sensor) Range (depth) image encodes shape and distance
Image Formation Dr. Gerhard Roth COMP 4102A Winter 2014 Version 1 Image Formation Two type of images Intensity image encodes light intensities (passive sensor) Range (depth) image encodes shape and distance
The Camera : Computational Photography Alexei Efros, CMU, Fall 2008
 The Camera 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 How do we see the world? object film Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable
The Camera 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 How do we see the world? object film Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable
Digital Image Processing Chapter 6: Color Image Processing
 Digital Image Processing Chapter 6: Color Image Processing Spectrum of White Light 1666 Sir Isaac Newton, 24 ear old, discovered white light spectrum. Electromagnetic Spectrum Visible light wavelength:
Digital Image Processing Chapter 6: Color Image Processing Spectrum of White Light 1666 Sir Isaac Newton, 24 ear old, discovered white light spectrum. Electromagnetic Spectrum Visible light wavelength:
Sensors and Sensing Cameras and Camera Calibration
 Sensors and Sensing Cameras and Camera Calibration Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 20.11.2014
Sensors and Sensing Cameras and Camera Calibration Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 20.11.2014
PRACTICAL IMAGE AND VIDEO PROCESSING USING MATLAB
 PRACTICAL IMAGE AND VIDEO PROCESSING USING MATLAB OGE MARQUES Florida Atlantic University *IEEE IEEE PRESS WWILEY A JOHN WILEY & SONS, INC., PUBLICATION CONTENTS LIST OF FIGURES LIST OF TABLES FOREWORD
PRACTICAL IMAGE AND VIDEO PROCESSING USING MATLAB OGE MARQUES Florida Atlantic University *IEEE IEEE PRESS WWILEY A JOHN WILEY & SONS, INC., PUBLICATION CONTENTS LIST OF FIGURES LIST OF TABLES FOREWORD
Reading. Projections. The 3D synthetic camera model. Imaging with the synthetic camera. Angel. Chapter 5. Optional
 Reading Angel. Chapter 5 Optional Projections David F. Rogers and J. Alan Adams, Mathematical Elements for Computer Graphics, Second edition, McGraw-Hill, New York, 1990, Chapter 3. The 3D snthetic camera
Reading Angel. Chapter 5 Optional Projections David F. Rogers and J. Alan Adams, Mathematical Elements for Computer Graphics, Second edition, McGraw-Hill, New York, 1990, Chapter 3. The 3D snthetic camera
Graphics and Interaction Perspective Geometry
 433-324 Graphics and Interaction Perspective Geometr Department of Computer Science and Software Engineering The Lecture outline Introduction to perspective geometr Perspective Geometr Centre of projection
433-324 Graphics and Interaction Perspective Geometr Department of Computer Science and Software Engineering The Lecture outline Introduction to perspective geometr Perspective Geometr Centre of projection
Lecture 2 Camera Models
 Lecture 2 Camera Models Professor Silvio Savarese Computational Vision and Geometr Lab Silvio Savarese Lecture 2-4-Jan-4 Announcements Prerequisites: an questions? This course requires knowledge of linear
Lecture 2 Camera Models Professor Silvio Savarese Computational Vision and Geometr Lab Silvio Savarese Lecture 2-4-Jan-4 Announcements Prerequisites: an questions? This course requires knowledge of linear
8.2 IMAGE PROCESSING VERSUS IMAGE ANALYSIS Image processing: The collection of routines and
 8.1 INTRODUCTION In this chapter, we will study and discuss some fundamental techniques for image processing and image analysis, with a few examples of routines developed for certain purposes. 8.2 IMAGE
8.1 INTRODUCTION In this chapter, we will study and discuss some fundamental techniques for image processing and image analysis, with a few examples of routines developed for certain purposes. 8.2 IMAGE
Lecture 7: Camera Models
 Lecture 7: Camera Models Professor Stanford Vision Lab 1 What we will learn toda? Pinhole cameras Cameras & lenses The geometr of pinhole cameras Reading: [FP]Chapters 1 3 [HZ] Chapter 6 2 What we will
Lecture 7: Camera Models Professor Stanford Vision Lab 1 What we will learn toda? Pinhole cameras Cameras & lenses The geometr of pinhole cameras Reading: [FP]Chapters 1 3 [HZ] Chapter 6 2 What we will
Cameras. CSE 455, Winter 2010 January 25, 2010
 Cameras CSE 455, Winter 2010 January 25, 2010 Announcements New Lecturer! Neel Joshi, Ph.D. Post-Doctoral Researcher Microsoft Research neel@cs Project 1b (seam carving) was due on Friday the 22 nd Project
Cameras CSE 455, Winter 2010 January 25, 2010 Announcements New Lecturer! Neel Joshi, Ph.D. Post-Doctoral Researcher Microsoft Research neel@cs Project 1b (seam carving) was due on Friday the 22 nd Project
To Do. Advanced Computer Graphics. Outline. Computational Imaging. How do we see the world? Pinhole camera
 Advanced Computer Graphics CSE 163 [Spring 2017], Lecture 14 Ravi Ramamoorthi http://www.cs.ucsd.edu/~ravir To Do Assignment 2 due May 19 Any last minute issues or questions? Next two lectures: Imaging,
Advanced Computer Graphics CSE 163 [Spring 2017], Lecture 14 Ravi Ramamoorthi http://www.cs.ucsd.edu/~ravir To Do Assignment 2 due May 19 Any last minute issues or questions? Next two lectures: Imaging,
BPM, Wire-Scanner, OTR/YAG Screens, and Collimator Polarity Conventions
 BPM, Wire-Scanner, OTR/YAG Screens, and Collimator Polarit Conventions Beam Position Monitors (BPMs) The Beam Position Monitors (BPMs) in the beamline are used to measure transverse ( and ) electron beam
BPM, Wire-Scanner, OTR/YAG Screens, and Collimator Polarit Conventions Beam Position Monitors (BPMs) The Beam Position Monitors (BPMs) in the beamline are used to measure transverse ( and ) electron beam
LENSES. INEL 6088 Computer Vision
 LENSES INEL 6088 Computer Vision Digital camera A digital camera replaces film with a sensor array Each cell in the array is a Charge Coupled Device light-sensitive diode that converts photons to electrons
LENSES INEL 6088 Computer Vision Digital camera A digital camera replaces film with a sensor array Each cell in the array is a Charge Coupled Device light-sensitive diode that converts photons to electrons
Image Acquisition Hardware. Image Acquisition and Representation. CCD Camera. Camera. how digital images are produced
 Image Acquisition Hardware Image Acquisition and Representation how digital images are produced how digital images are represented photometric models-basic radiometry image noises and noise suppression
Image Acquisition Hardware Image Acquisition and Representation how digital images are produced how digital images are represented photometric models-basic radiometry image noises and noise suppression
Image Enhancement II: Neighborhood Operations
 Image Enhancement II: Neighborhood Operations Image Enhancement:Spatial Filtering Operation Idea: Use a mask to alter piel values according to local operation Aim: De)-Emphasize some spatial requencies
Image Enhancement II: Neighborhood Operations Image Enhancement:Spatial Filtering Operation Idea: Use a mask to alter piel values according to local operation Aim: De)-Emphasize some spatial requencies
Computer Vision. The Pinhole Camera Model
 Computer Vision The Pinhole Camera Model Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2017/2018 Imaging device
Computer Vision The Pinhole Camera Model Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2017/2018 Imaging device
Projection. Readings. Szeliski 2.1. Wednesday, October 23, 13
 Projection Readings Szeliski 2.1 Projection Readings Szeliski 2.1 Müller-Lyer Illusion by Pravin Bhat Müller-Lyer Illusion by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html Müller-Lyer
Projection Readings Szeliski 2.1 Projection Readings Szeliski 2.1 Müller-Lyer Illusion by Pravin Bhat Müller-Lyer Illusion by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html Müller-Lyer
Lecture 2 Camera Models
 Lecture 2 Camera Models Professor Silvio Savarese Computational Vision and Geometr Lab Silvio Savarese Lecture 2 - -Jan-8 Lecture 2 Camera Models Pinhole cameras Cameras lenses The geometr of pinhole cameras
Lecture 2 Camera Models Professor Silvio Savarese Computational Vision and Geometr Lab Silvio Savarese Lecture 2 - -Jan-8 Lecture 2 Camera Models Pinhole cameras Cameras lenses The geometr of pinhole cameras
Midterm Examination CS 534: Computational Photography
 Midterm Examination CS 534: Computational Photography November 3, 2015 NAME: SOLUTIONS Problem Score Max Score 1 8 2 8 3 9 4 4 5 3 6 4 7 6 8 13 9 7 10 4 11 7 12 10 13 9 14 8 Total 100 1 1. [8] What are
Midterm Examination CS 534: Computational Photography November 3, 2015 NAME: SOLUTIONS Problem Score Max Score 1 8 2 8 3 9 4 4 5 3 6 4 7 6 8 13 9 7 10 4 11 7 12 10 13 9 14 8 Total 100 1 1. [8] What are
Image Formation and Capture
 Figure credits: B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, A. Theuwissen, and J. Malik Image Formation and Capture COS 429: Computer Vision Image Formation and Capture Real world Optics Sensor Devices
Figure credits: B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, A. Theuwissen, and J. Malik Image Formation and Capture COS 429: Computer Vision Image Formation and Capture Real world Optics Sensor Devices
Basic principles of photography. David Capel 346B IST
 Basic principles of photography David Capel 346B IST Latin Camera Obscura = Dark Room Light passing through a small hole produces an inverted image on the opposite wall Safely observing the solar eclipse
Basic principles of photography David Capel 346B IST Latin Camera Obscura = Dark Room Light passing through a small hole produces an inverted image on the opposite wall Safely observing the solar eclipse
Image Acquisition and Representation. Image Acquisition Hardware. Camera. how digital images are produced how digital images are represented
 Image Acquisition and Representation Slide 1 how digital images are produced how digital images are represented Slide 3 Note a digital camera represents a camera system with a built-in digitizer. photometric
Image Acquisition and Representation Slide 1 how digital images are produced how digital images are represented Slide 3 Note a digital camera represents a camera system with a built-in digitizer. photometric
Lecture 02 Image Formation 1
 Institute of Informatics Institute of Neuroinformatics Lecture 02 Image Formation 1 Davide Scaramuzza http://rpg.ifi.uzh.ch 1 Lab Exercise 1 - Today afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Work
Institute of Informatics Institute of Neuroinformatics Lecture 02 Image Formation 1 Davide Scaramuzza http://rpg.ifi.uzh.ch 1 Lab Exercise 1 - Today afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Work
Projection. Projection. Image formation. Müller-Lyer Illusion. Readings. Readings. Let s design a camera. Szeliski 2.1. Szeliski 2.
 Projection Projection Readings Szeliski 2.1 Readings Szeliski 2.1 Müller-Lyer Illusion Image formation object film by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html Let s design a camera
Projection Projection Readings Szeliski 2.1 Readings Szeliski 2.1 Müller-Lyer Illusion Image formation object film by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html Let s design a camera
Projection. Announcements. Müller-Lyer Illusion. Image formation. Readings Nalwa 2.1
 Announcements Mailing list (you should have received messages) Project 1 additional test sequences online Projection Readings Nalwa 2.1 Müller-Lyer Illusion Image formation object film by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html
Announcements Mailing list (you should have received messages) Project 1 additional test sequences online Projection Readings Nalwa 2.1 Müller-Lyer Illusion Image formation object film by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html
Computing for Engineers in Python
 Computing for Engineers in Python Lecture 10: Signal (Image) Processing Autumn 2011-12 Some slides incorporated from Benny Chor s course 1 Lecture 9: Highlights Sorting, searching and time complexity Preprocessing
Computing for Engineers in Python Lecture 10: Signal (Image) Processing Autumn 2011-12 Some slides incorporated from Benny Chor s course 1 Lecture 9: Highlights Sorting, searching and time complexity Preprocessing
Image Acquisition and Representation. Camera. CCD Camera. Image Acquisition Hardware
 Image Acquisition and Representation Camera Slide 1 how digital images are produced how digital images are represented Slide 3 First photograph was due to Niepce of France in 1827. Basic abstraction is
Image Acquisition and Representation Camera Slide 1 how digital images are produced how digital images are represented Slide 3 First photograph was due to Niepce of France in 1827. Basic abstraction is
Image Acquisition and Representation
 Image Acquisition and Representation how digital images are produced how digital images are represented photometric models-basic radiometry image noises and noise suppression methods 1 Image Acquisition
Image Acquisition and Representation how digital images are produced how digital images are represented photometric models-basic radiometry image noises and noise suppression methods 1 Image Acquisition
MEM: Intro to Robotics. Assignment 3I. Due: Wednesday 10/15 11:59 EST
 MEM: Intro to Robotics Assignment 3I Due: Wednesday 10/15 11:59 EST 1. Basic Optics You are shopping for a new lens for your Canon D30 digital camera and there are lots of lens options at the store. Your
MEM: Intro to Robotics Assignment 3I Due: Wednesday 10/15 11:59 EST 1. Basic Optics You are shopping for a new lens for your Canon D30 digital camera and there are lots of lens options at the store. Your
Computer Vision. Howie Choset Introduction to Robotics
 Computer Vision Howie Choset http://www.cs.cmu.edu.edu/~choset Introduction to Robotics http://generalrobotics.org What is vision? What is computer vision? Edge Detection Edge Detection Interest points
Computer Vision Howie Choset http://www.cs.cmu.edu.edu/~choset Introduction to Robotics http://generalrobotics.org What is vision? What is computer vision? Edge Detection Edge Detection Interest points
CS 376b Computer Vision
 CS 376b Computer Vision 09 / 03 / 2014 Instructor: Michael Eckmann Today s Topics This is technically a lab/discussion session, but I'll treat it as a lecture today. Introduction to the course layout,
CS 376b Computer Vision 09 / 03 / 2014 Instructor: Michael Eckmann Today s Topics This is technically a lab/discussion session, but I'll treat it as a lecture today. Introduction to the course layout,
Image Formation and Capture. Acknowledgment: some figures by B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, and A. Theuwissen
 Image Formation and Capture Acknowledgment: some figures by B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, and A. Theuwissen Image Formation and Capture Real world Optics Sensor Devices Sources of Error
Image Formation and Capture Acknowledgment: some figures by B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, and A. Theuwissen Image Formation and Capture Real world Optics Sensor Devices Sources of Error
Chapters 1 & 2. Definitions and applications Conceptual basis of photogrammetric processing
 Chapters 1 & 2 Chapter 1: Photogrammetry Definitions and applications Conceptual basis of photogrammetric processing Transition from two-dimensional imagery to three-dimensional information Automation
Chapters 1 & 2 Chapter 1: Photogrammetry Definitions and applications Conceptual basis of photogrammetric processing Transition from two-dimensional imagery to three-dimensional information Automation
Building a Real Camera. Slides Credit: Svetlana Lazebnik
 Building a Real Camera Slides Credit: Svetlana Lazebnik Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible?
Building a Real Camera Slides Credit: Svetlana Lazebnik Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible?
Exercise questions for Machine vision
 Exercise questions for Machine vision This is a collection of exercise questions. These questions are all examination alike which means that similar questions may appear at the written exam. I ve divided
Exercise questions for Machine vision This is a collection of exercise questions. These questions are all examination alike which means that similar questions may appear at the written exam. I ve divided
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Sensors and Image Formation Imaging sensors and models of image formation Coordinate systems Digital
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Sensors and Image Formation Imaging sensors and models of image formation Coordinate systems Digital
Name: Date: Math in Special Effects: Try Other Challenges. Student Handout
 Name: Date: Math in Special Effects: Try Other Challenges When filming special effects, a high-speed photographer needs to control the duration and impact of light by adjusting a number of settings, including
Name: Date: Math in Special Effects: Try Other Challenges When filming special effects, a high-speed photographer needs to control the duration and impact of light by adjusting a number of settings, including
Computational Approaches to Cameras
 Computational Approaches to Cameras 11/16/17 Magritte, The False Mirror (1935) Computational Photography Derek Hoiem, University of Illinois Announcements Final project proposal due Monday (see links on
Computational Approaches to Cameras 11/16/17 Magritte, The False Mirror (1935) Computational Photography Derek Hoiem, University of Illinois Announcements Final project proposal due Monday (see links on
Dr F. Cuzzolin 1. September 29, 2015
 P00407 Principles of Computer Vision 1 1 Department of Computing and Communication Technologies Oxford Brookes University, UK September 29, 2015 September 29, 2015 1 / 73 Outline of the Lecture 1 2 Basics
P00407 Principles of Computer Vision 1 1 Department of Computing and Communication Technologies Oxford Brookes University, UK September 29, 2015 September 29, 2015 1 / 73 Outline of the Lecture 1 2 Basics
Vision Review: Image Processing. Course web page:
 Vision Review: Image Processing Course web page: www.cis.udel.edu/~cer/arv September 7, Announcements Homework and paper presentation guidelines are up on web page Readings for next Tuesday: Chapters 6,.,
Vision Review: Image Processing Course web page: www.cis.udel.edu/~cer/arv September 7, Announcements Homework and paper presentation guidelines are up on web page Readings for next Tuesday: Chapters 6,.,
Building a Real Camera
 Building a Real Camera Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible? Less light gets through Diffraction
Building a Real Camera Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible? Less light gets through Diffraction
Image Processing for feature extraction
 Image Processing for feature extraction 1 Outline Rationale for image pre-processing Gray-scale transformations Geometric transformations Local preprocessing Reading: Sonka et al 5.1, 5.2, 5.3 2 Image
Image Processing for feature extraction 1 Outline Rationale for image pre-processing Gray-scale transformations Geometric transformations Local preprocessing Reading: Sonka et al 5.1, 5.2, 5.3 2 Image
Digital Photographs, Image Sensors and Matrices
 Digital Photographs, Image Sensors and Matrices Digital Camera Image Sensors Electron Counts Checkerboard Analogy Bryce Bayer s Color Filter Array Mosaic. Image Sensor Data to Matrix Data Visualization
Digital Photographs, Image Sensors and Matrices Digital Camera Image Sensors Electron Counts Checkerboard Analogy Bryce Bayer s Color Filter Array Mosaic. Image Sensor Data to Matrix Data Visualization
Digital Photographs and Matrices
 Digital Photographs and Matrices Digital Camera Image Sensors Electron Counts Checkerboard Analogy Bryce Bayer s Color Filter Array Mosaic. Image Sensor Data to Matrix Data Visualization of Matrix Addition
Digital Photographs and Matrices Digital Camera Image Sensors Electron Counts Checkerboard Analogy Bryce Bayer s Color Filter Array Mosaic. Image Sensor Data to Matrix Data Visualization of Matrix Addition
A Study on analysis of intracranial acoustic wave propagation by the finite difference time domain method
 A Stud on analsis of intracranial acoustic wave propagation b the finite difference time domain method 4.5 Wa Biological effects of ultrasound, ultrasonic tomograph Yoko Tanikaga, Toshikazu Takizawa, Takefumi
A Stud on analsis of intracranial acoustic wave propagation b the finite difference time domain method 4.5 Wa Biological effects of ultrasound, ultrasonic tomograph Yoko Tanikaga, Toshikazu Takizawa, Takefumi
Virtual and Digital Cameras
 CS148: Introduction to Computer Graphics and Imaging Virtual and Digital Cameras Ansel Adams Topics Effect Cause Field of view Film size, focal length Perspective Lens, focal length Focus Dist. of lens
CS148: Introduction to Computer Graphics and Imaging Virtual and Digital Cameras Ansel Adams Topics Effect Cause Field of view Film size, focal length Perspective Lens, focal length Focus Dist. of lens
Image Formation III Chapter 1 (Forsyth&Ponce) Cameras Lenses & Sensors
 Cameras Lenses & Sensors") Image Formation III Chapter 1 (Forsyth&Ponce) Cameras Lenses & Sensors Guido Gerig CS-GY 6643, Spring 2017 (slides modified from Marc Pollefeys, UNC Chapel Hill/ ETH Zurich, With content from Prof. Trevor
Image Formation III Chapter 1 (Forsyth&Ponce) Cameras Lenses & Sensors Guido Gerig CS-GY 6643, Spring 2017 (slides modified from Marc Pollefeys, UNC Chapel Hill/ ETH Zurich, With content from Prof. Trevor
SUPER RESOLUTION INTRODUCTION
 SUPER RESOLUTION Jnanavardhini - Online MultiDisciplinary Research Journal Ms. Amalorpavam.G Assistant Professor, Department of Computer Sciences, Sambhram Academy of Management. Studies, Bangalore Abstract:-
SUPER RESOLUTION Jnanavardhini - Online MultiDisciplinary Research Journal Ms. Amalorpavam.G Assistant Professor, Department of Computer Sciences, Sambhram Academy of Management. Studies, Bangalore Abstract:-
Design and Correction of optical Systems
 Design and Correction of optical Sstems Part 5: Properties of Optical Sstems Summer term 2012 Herbert Gross Overview 2 1. Basics 2012-04-18 2. Materials 2012-04-25 3. Components 2012-05-02 4. Paraxial
Design and Correction of optical Sstems Part 5: Properties of Optical Sstems Summer term 2012 Herbert Gross Overview 2 1. Basics 2012-04-18 2. Materials 2012-04-25 3. Components 2012-05-02 4. Paraxial
CSE 473/573 Computer Vision and Image Processing (CVIP)
") CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 4 Image formation(part I) Schedule Last class linear algebra overview Today Image formation and camera properties
CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 4 Image formation(part I) Schedule Last class linear algebra overview Today Image formation and camera properties
Reading. 8. Projections. 3D Geometry Pipeline. 3D Geometry Pipeline (cont d) Required: w Watt, Section
 Required: w Watt, Section") Reading Required: Watt, Section 5.2.2 5.2.4. Further reading: 8. Projections Fole, et al, Chapter 5.6 and Chapter 6 David F. Rogers and J. Alan Adams, Mathematical Elements for Computer Graphics, 2 nd
Reading Required: Watt, Section 5.2.2 5.2.4. Further reading: 8. Projections Fole, et al, Chapter 5.6 and Chapter 6 David F. Rogers and J. Alan Adams, Mathematical Elements for Computer Graphics, 2 nd
Lecture 22: Cameras & Lenses III. Computer Graphics and Imaging UC Berkeley CS184/284A, Spring 2017
 Lecture 22: Cameras & Lenses III Computer Graphics and Imaging UC Berkeley, Spring 2017 F-Number For Lens vs. Photo A lens s F-Number is the maximum for that lens E.g. 50 mm F/1.4 is a high-quality telephoto
Lecture 22: Cameras & Lenses III Computer Graphics and Imaging UC Berkeley, Spring 2017 F-Number For Lens vs. Photo A lens s F-Number is the maximum for that lens E.g. 50 mm F/1.4 is a high-quality telephoto
IMAGE ENHANCEMENT IN SPATIAL DOMAIN
 A First Course in Machine Vision IMAGE ENHANCEMENT IN SPATIAL DOMAIN By: Ehsan Khoramshahi Definitions The principal objective of enhancement is to process an image so that the result is more suitable
A First Course in Machine Vision IMAGE ENHANCEMENT IN SPATIAL DOMAIN By: Ehsan Khoramshahi Definitions The principal objective of enhancement is to process an image so that the result is more suitable
Digital Imaging Rochester Institute of Technology
 Digital Imaging 1999 Rochester Institute of Technology So Far... camera AgX film processing image AgX photographic film captures image formed by the optical elements (lens). Unfortunately, the processing
Digital Imaging 1999 Rochester Institute of Technology So Far... camera AgX film processing image AgX photographic film captures image formed by the optical elements (lens). Unfortunately, the processing
Scrabble Board Automatic Detector for Third Party Applications
 Scrabble Board Automatic Detector for Third Party Applications David Hirschberg Computer Science Department University of California, Irvine hirschbd@uci.edu Abstract Abstract Scrabble is a well-known
Scrabble Board Automatic Detector for Third Party Applications David Hirschberg Computer Science Department University of California, Irvine hirschbd@uci.edu Abstract Abstract Scrabble is a well-known
Design of Temporally Dithered Codes for Increased Depth of Field in Structured Light Systems
 Design of Temporally Dithered Codes for Increased Depth of Field in Structured Light Systems Ricardo R. Garcia University of California, Berkeley Berkeley, CA rrgarcia@eecs.berkeley.edu Abstract In recent
Design of Temporally Dithered Codes for Increased Depth of Field in Structured Light Systems Ricardo R. Garcia University of California, Berkeley Berkeley, CA rrgarcia@eecs.berkeley.edu Abstract In recent
Why learn about photography in this course?
 Why learn about photography in this course? Geri's Game: Note the background is blurred. - photography: model of image formation - Many computer graphics methods use existing photographs e.g. texture &
Why learn about photography in this course? Geri's Game: Note the background is blurred. - photography: model of image formation - Many computer graphics methods use existing photographs e.g. texture &
Lecture 7: Camera Models
 Lecture 7: Camera Models Professor Fei- Fei Li Stanford Vision Lab Lecture 7 -! 1 What we will learn toda? Pinhole cameras Cameras & lenses The geometr of pinhole cameras Reading: [FP] Chapters 1 3 [HZ]
Lecture 7: Camera Models Professor Fei- Fei Li Stanford Vision Lab Lecture 7 -! 1 What we will learn toda? Pinhole cameras Cameras & lenses The geometr of pinhole cameras Reading: [FP] Chapters 1 3 [HZ]
Lensless Imaging with a Controllable Aperture
 Lensless Imaging with a Controllable Aperture Assaf Zomet Shree K. Nayar Computer Science Department Columbia University New York, NY, 10027 E-mail: zomet@humaneyes.com, nayar@cs.columbia.edu Abstract
Lensless Imaging with a Controllable Aperture Assaf Zomet Shree K. Nayar Computer Science Department Columbia University New York, NY, 10027 E-mail: zomet@humaneyes.com, nayar@cs.columbia.edu Abstract
How does prism technology help to achieve superior color image quality?
 WHITE PAPER How does prism technology help to achieve superior color image quality? Achieving superior image quality requires real and full color depth for every channel, improved color contrast and color
WHITE PAPER How does prism technology help to achieve superior color image quality? Achieving superior image quality requires real and full color depth for every channel, improved color contrast and color
lecture 24 image capture - photography: model of image formation - image blur - camera settings (f-number, shutter speed) - exposure - camera response
 - exposure - camera response") lecture 24 image capture - photography: model of image formation - image blur - camera settings (f-number, shutter speed) - exposure - camera response - application: high dynamic range imaging Why learn
lecture 24 image capture - photography: model of image formation - image blur - camera settings (f-number, shutter speed) - exposure - camera response - application: high dynamic range imaging Why learn
FPGA Implementation of Global Vision for Robot Soccer as a Smart Camera
 FPGA Implementation of Global Vision for Robot Soccer as a Smart Camera Miguel Contreras, Donald G Baile and Gourab Sen Gupta School of Engineering and Advanced Technolog Masse Universit, Palmerston North,
FPGA Implementation of Global Vision for Robot Soccer as a Smart Camera Miguel Contreras, Donald G Baile and Gourab Sen Gupta School of Engineering and Advanced Technolog Masse Universit, Palmerston North,
Image acquisition. In both cases, the digital sensing element is one of the following: Line array Area array. Single sensor
 Image acquisition Digital images are acquired by direct digital acquisition (digital still/video cameras), or scanning material acquired as analog signals (slides, photographs, etc.). In both cases, the
Image acquisition Digital images are acquired by direct digital acquisition (digital still/video cameras), or scanning material acquired as analog signals (slides, photographs, etc.). In both cases, the
ELEC Dr Reji Mathew Electrical Engineering UNSW
 ELEC 4622 Dr Reji Mathew Electrical Engineering UNSW Filter Design Circularly symmetric 2-D low-pass filter Pass-band radial frequency: ω p Stop-band radial frequency: ω s 1 δ p Pass-band tolerances: δ
ELEC 4622 Dr Reji Mathew Electrical Engineering UNSW Filter Design Circularly symmetric 2-D low-pass filter Pass-band radial frequency: ω p Stop-band radial frequency: ω s 1 δ p Pass-band tolerances: δ
Cameras. Steve Rotenberg CSE168: Rendering Algorithms UCSD, Spring 2017
 Cameras Steve Rotenberg CSE168: Rendering Algorithms UCSD, Spring 2017 Camera Focus Camera Focus So far, we have been simulating pinhole cameras with perfect focus Often times, we want to simulate more
Cameras Steve Rotenberg CSE168: Rendering Algorithms UCSD, Spring 2017 Camera Focus Camera Focus So far, we have been simulating pinhole cameras with perfect focus Often times, we want to simulate more
Acquisition. Some slides from: Yung-Yu Chuang (DigiVfx) Jan Neumann, Pat Hanrahan, Alexei Efros
 Jan Neumann, Pat Hanrahan, Alexei Efros") Acquisition Some slides from: Yung-Yu Chuang (DigiVfx) Jan Neumann, Pat Hanrahan, Alexei Efros Image Acquisition Digital Camera Film Outline Pinhole camera Lens Lens aberrations Exposure Sensors Noise
Acquisition Some slides from: Yung-Yu Chuang (DigiVfx) Jan Neumann, Pat Hanrahan, Alexei Efros Image Acquisition Digital Camera Film Outline Pinhole camera Lens Lens aberrations Exposure Sensors Noise
Chapter 36. Image Formation
 Chapter 36 Image Formation Image of Formation Images can result when light rays encounter flat or curved surfaces between two media. Images can be formed either by reflection or refraction due to these
Chapter 36 Image Formation Image of Formation Images can result when light rays encounter flat or curved surfaces between two media. Images can be formed either by reflection or refraction due to these
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 5: Cameras and Projection Szeliski 2.1.3-2.1.6 Reading Announcements Project 1 assigned, see projects page: http://www.cs.cornell.edu/courses/cs6670/2011sp/projects/projects.html
CS6670: Computer Vision Noah Snavely Lecture 5: Cameras and Projection Szeliski 2.1.3-2.1.6 Reading Announcements Project 1 assigned, see projects page: http://www.cs.cornell.edu/courses/cs6670/2011sp/projects/projects.html
VC 14/15 TP2 Image Formation
 VC 14/15 TP2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
VC 14/15 TP2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
Digital Image Processing Chapter 3: Image Enhancement in the Spatial Domain
 Digital Image Processing Chapter 3: Image Enhancement in the Spatial Domain Principle Objective o Enhancement Process an image so that the result will be more suitable than the original image or a speciic
Digital Image Processing Chapter 3: Image Enhancement in the Spatial Domain Principle Objective o Enhancement Process an image so that the result will be more suitable than the original image or a speciic
Color Models and Color Image Processing. CS 663, Ajit Rajwade
 Color Models and Color Image Processing CS 663 Ajit Rajwade Pouring in color Grascale image: D arra of size M N containing scalar intensit values gralevels. Color image: tpicall represented as a 3D arra
Color Models and Color Image Processing CS 663 Ajit Rajwade Pouring in color Grascale image: D arra of size M N containing scalar intensit values gralevels. Color image: tpicall represented as a 3D arra
Astronomical Cameras
 Astronomical Cameras I. The Pinhole Camera Pinhole Camera (or Camera Obscura) Whenever light passes through a small hole or aperture it creates an image opposite the hole This is an effect wherever apertures
Astronomical Cameras I. The Pinhole Camera Pinhole Camera (or Camera Obscura) Whenever light passes through a small hole or aperture it creates an image opposite the hole This is an effect wherever apertures
General Imaging System
 General Imaging System Lecture Slides ME 4060 Machine Vision and Vision-based Control Chapter 5 Image Sensing and Acquisition By Dr. Debao Zhou 1 2 Light, Color, and Electromagnetic Spectrum Penetrate
General Imaging System Lecture Slides ME 4060 Machine Vision and Vision-based Control Chapter 5 Image Sensing and Acquisition By Dr. Debao Zhou 1 2 Light, Color, and Electromagnetic Spectrum Penetrate
Megapixels and more. The basics of image processing in digital cameras. Construction of a digital camera
 Megapixels and more The basics of image processing in digital cameras Photography is a technique of preserving pictures with the help of light. The first durable photograph was made by Nicephor Niepce
Megapixels and more The basics of image processing in digital cameras Photography is a technique of preserving pictures with the help of light. The first durable photograph was made by Nicephor Niepce
Coded photography , , Computational Photography Fall 2018, Lecture 14
 Coded photography http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 14 Overview of today s lecture The coded photography paradigm. Dealing with
Coded photography http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 14 Overview of today s lecture The coded photography paradigm. Dealing with
What will be on the midterm?
 What will be on the midterm? CS 178, Spring 2014 Marc Levoy Computer Science Department Stanford University General information 2 Monday, 7-9pm, Cubberly Auditorium (School of Edu) closed book, no notes
What will be on the midterm? CS 178, Spring 2014 Marc Levoy Computer Science Department Stanford University General information 2 Monday, 7-9pm, Cubberly Auditorium (School of Edu) closed book, no notes
LENSLESS IMAGING BY COMPRESSIVE SENSING
 LENSLESS IMAGING BY COMPRESSIVE SENSING Gang Huang, Hong Jiang, Kim Matthews and Paul Wilford Bell Labs, Alcatel-Lucent, Murray Hill, NJ 07974 ABSTRACT In this paper, we propose a lensless compressive
LENSLESS IMAGING BY COMPRESSIVE SENSING Gang Huang, Hong Jiang, Kim Matthews and Paul Wilford Bell Labs, Alcatel-Lucent, Murray Hill, NJ 07974 ABSTRACT In this paper, we propose a lensless compressive
SECTION I - CHAPTER 2 DIGITAL IMAGING PROCESSING CONCEPTS
 RADT 3463 - COMPUTERIZED IMAGING Section I: Chapter 2 RADT 3463 Computerized Imaging 1 SECTION I - CHAPTER 2 DIGITAL IMAGING PROCESSING CONCEPTS RADT 3463 COMPUTERIZED IMAGING Section I: Chapter 2 RADT
RADT 3463 - COMPUTERIZED IMAGING Section I: Chapter 2 RADT 3463 Computerized Imaging 1 SECTION I - CHAPTER 2 DIGITAL IMAGING PROCESSING CONCEPTS RADT 3463 COMPUTERIZED IMAGING Section I: Chapter 2 RADT
SYLLABUS CHAPTER - 2 : INTENSITY TRANSFORMATIONS. Some Basic Intensity Transformation Functions, Histogram Processing.
 Contents i SYLLABUS UNIT - I CHAPTER - 1 : INTRODUCTION TO DIGITAL IMAGE PROCESSING Introduction, Origins of Digital Image Processing, Applications of Digital Image Processing, Fundamental Steps, Components,
Contents i SYLLABUS UNIT - I CHAPTER - 1 : INTRODUCTION TO DIGITAL IMAGE PROCESSING Introduction, Origins of Digital Image Processing, Applications of Digital Image Processing, Fundamental Steps, Components,
Image Processing of Motion for Security Applications
 Image Processing of Motion for Securit Applications Frantisek Duchon, Assoc. Prof., Peter Bučka, MSc., Martina Szabová, MA, Martin Dekan, PhD., Peter Beňo, PhD., Michal Tolgess, PhD. Slovak Universit of
Image Processing of Motion for Securit Applications Frantisek Duchon, Assoc. Prof., Peter Bučka, MSc., Martina Szabová, MA, Martin Dekan, PhD., Peter Beňo, PhD., Michal Tolgess, PhD. Slovak Universit of
Image Formation and Camera Design
 Image Formation and Camera Design Spring 2003 CMSC 426 Jan Neumann 2/20/03 Light is all around us! From London & Upton, Photography Conventional camera design... Ken Kay, 1969 in Light & Film, TimeLife
Image Formation and Camera Design Spring 2003 CMSC 426 Jan Neumann 2/20/03 Light is all around us! From London & Upton, Photography Conventional camera design... Ken Kay, 1969 in Light & Film, TimeLife
3D Viewing. Introduction to Computer Graphics Torsten Möller / Manfred Klaffenböck. Machiraju/Zhang/Möller
 3D Viewing Introduction to Computer Graphics Torsten Möller / Manfred Klaffenböck Machiraju/Zhang/Möller Reading Chapter 5 of Angel Chapter 13 of Hughes, van Dam, Chapter 7 of Shirley+Marschner Machiraju/Zhang/Möller
3D Viewing Introduction to Computer Graphics Torsten Möller / Manfred Klaffenböck Machiraju/Zhang/Möller Reading Chapter 5 of Angel Chapter 13 of Hughes, van Dam, Chapter 7 of Shirley+Marschner Machiraju/Zhang/Möller
Preparing Remote Sensing Data for Natural Resources Mapping (image enhancement, rectifications )
") Preparing Remote Sensing Data for Natural Resources Mapping (image enhancement, rectifications ) Why is this important What are the major approaches Examples of digital image enhancement Follow up exercises
Preparing Remote Sensing Data for Natural Resources Mapping (image enhancement, rectifications ) Why is this important What are the major approaches Examples of digital image enhancement Follow up exercises
A Foveated Visual Tracking Chip
 TP 2.1: A Foveated Visual Tracking Chip Ralph Etienne-Cummings¹, ², Jan Van der Spiegel¹, ³, Paul Mueller¹, Mao-zhu Zhang¹ ¹Corticon Inc., Philadelphia, PA ²Department of Electrical Engineering, Southern
TP 2.1: A Foveated Visual Tracking Chip Ralph Etienne-Cummings¹, ², Jan Van der Spiegel¹, ³, Paul Mueller¹, Mao-zhu Zhang¹ ¹Corticon Inc., Philadelphia, PA ²Department of Electrical Engineering, Southern
Image Enhancement. Image Enhancement
 SPATIAL FILTERING g h * h g FREQUENCY DOMAIN FILTERING G H. F F H G Copright RMR / RDL - 999. PEE53 - Processamento Digital de Imagens LOW PASS FILTERING attenuate or eliminate high-requenc components
SPATIAL FILTERING g h * h g FREQUENCY DOMAIN FILTERING G H. F F H G Copright RMR / RDL - 999. PEE53 - Processamento Digital de Imagens LOW PASS FILTERING attenuate or eliminate high-requenc components
VEHICLE LICENSE PLATE DETECTION ALGORITHM BASED ON STATISTICAL CHARACTERISTICS IN HSI COLOR MODEL
 VEHICLE LICENSE PLATE DETECTION ALGORITHM BASED ON STATISTICAL CHARACTERISTICS IN HSI COLOR MODEL Instructor : Dr. K. R. Rao Presented by: Prasanna Venkatesh Palani (1000660520) prasannaven.palani@mavs.uta.edu
VEHICLE LICENSE PLATE DETECTION ALGORITHM BASED ON STATISTICAL CHARACTERISTICS IN HSI COLOR MODEL Instructor : Dr. K. R. Rao Presented by: Prasanna Venkatesh Palani (1000660520) prasannaven.palani@mavs.uta.edu
A Unified Framework for the Consumer-Grade Image Pipeline
 A Unified Framework for the Consumer-Grade Image Pipeline Konstantinos N. Plataniotis University of Toronto kostas@dsp.utoronto.ca www.dsp.utoronto.ca Common work with Rastislav Lukac Outline The problem
A Unified Framework for the Consumer-Grade Image Pipeline Konstantinos N. Plataniotis University of Toronto kostas@dsp.utoronto.ca www.dsp.utoronto.ca Common work with Rastislav Lukac Outline The problem
Images and Filters. EE/CSE 576 Linda Shapiro
 Images and Filters EE/CSE 576 Linda Shapiro What is an image? 2 3 . We sample the image to get a discrete set of pixels with quantized values. 2. For a gray tone image there is one band F(r,c), with values
Images and Filters EE/CSE 576 Linda Shapiro What is an image? 2 3 . We sample the image to get a discrete set of pixels with quantized values. 2. For a gray tone image there is one band F(r,c), with values