Autonomous Automation: How do we get to a Million Miles of testing?
|
|
|
- Melanie Hart
- 6 years ago
- Views:
Transcription

1 Autonomous Automation: How do we get to a Million Miles of testing? Jace Allen Business Development Manager Simulation, Test, and EEDM dspace Inc Pontiac Trail Wixom, MI USA 1
2 Agenda 1. Intro to V&V for ADAS/AV/HAD Changing Environment of AV/HAD ADAS V&V Process and ISO Testing Toolchain for ADAS/AV/HAD Models, Scenarios, and Sensors HIL Testing and Sensor Fusion Needs SIL Testing and Cluster Simulation 3. Testing Process and Autonomous Automation Testing Methods and Tools Real-time Testing and Observers Test Management and Automation Optimizing Testing



3 Challenges Testing autonomous driving in real traffic The real world is complex The real world is unpredictable The real world is hazardous Source: nik/pkb Unlimited number of real-life traffic scenarios Many unknown factors, human driver no longer as a fallback how to validate system robustness? Exponential growth in testing effort. hundreds of millions of test kilometers required. 4




4 Validate System Behavior with Simulation MBD Testing = Simulation at All Levels Advantages of simulation: reproducibility, test beyond performance/endurance limits and dangerous situations ISO recommends MIL/SIL/HIL simulation for conducting the software safety requirements verification What changes with testing Autonomous Vehicles? 5
5 ADAS/AV development process Requirements Specification System concept MIL (traffic simulation) Test drives in real traffic Homologation Driving simulator Test drives on prov. ground Prototyping ADAS HIL (closed-loop) SIL (closed-loop) Component HIL (closed-loop) Target implementation SIL (closed-loop) Algorithm ADAS/Sensor ECU(s) under Test 6 dspace-internal
6 ADAS/AV development process Requirements Specification System concept MIL (traffic simulation) Test drives in real traffic Homologation Driving simulator Test drives on prov. ground Machine learning Prototyping ADAS HIL (closed-loop) SIL (open-loop, data playback) SIL (closed-loop) Component HIL (closed-loop) Component HIL (open-loop) Target implementation SIL (closed-loop) SIL (open-loop) Algorithm ADAS/Sensor ECU(s) under Test 7 dspace-internal
7 ADAS/AV development process Requirements Specification Measurement data (Sensor and vehicle data) Cloud System concept MIL (traffic simulation) Driving simulator Test scenarios/cases Model-, parameter-, scenario management Test drives on prov. ground Test drives in real traffic Homologation Machine learning Prototyping ADAS HIL (closed-loop) SIL (open-loop, data playback) PC cluster SIL (closed-loop) Component HIL (closed-loop) Component HIL (open-loop) Target implementation Algorithm ADAS/Sensor ECU(s) under Test SIL (closed-loop) Cloud PC cluster SIL (open-loop) 8 dspace-internal
 Scenario databases,")

8 Challenges Changing validation process Vehicle, driver, sensors Road, road networks Traffic, roadside structures Environmental conditions (weather, ) Driving maneuvers Data & test management Models, parameters, tests, test results, Traffic scenarios (critical, representative, ) Scenario databases, Support of open file formats and standards Virtual ECUs Automated test execution, test evaluation and control Defined scenarios Stochastic parameter variation Test control to detect critical scenarios based on metrics and evaluation criteria Requirements-based testing not sufficient Real ECUs PC cluster 9
9 TESTING TOOLCHAIN FOR ADAS/AV/HAD









10 dspace Solutions: A Powerful ADAS Toolchain Simulate Models Test Scenarios Visualize? Maneuver Control & Experiment Test Management Tests 11



11 Automotive Simulation Models (ASM) for ADAS and autonomous driving Vehicle Dynamics Environment MotionDesk Animation Vehicle simulation Vehicle Dynamics Drivetrain Soft-ECU network Driver model Maneuver Road networks Roads and intersections Lane support Artificial/real world roads Road import Roadside structures Traffic Objects Static and dynamic objects Vehicles, trucks, pedestrians Traffic signs, traffic lights, parking vehicles, Environment Sensors 2-D/3-D sensors Camera, radar, lidar, Line, lane and traffic sign recognition Object list simulation Traffic ModelDesk Parameterization 12
")
12 Test Scenario Definition ASM Traffic Scenario definition ASM Simulated Traffic flow and Tool automation Independent definition of fellow scenarios Demo scenarios for standards (Euro NCAP) Open API for Automation Road Import OpenDRIVE, OpenCRG Measurement data/gnss Here/ADAS RP OSM, Google Earth Scenario Import Manually defined based on expert knowledge GIDAS database OpenSCENARIO (planned) ModelDesk API Stochastic, etc. 13
13 dspace HIL simulation technology for ADAS and autonomous driving Sensor models Road, environment, driving maneuvers Automotive Simulation Models (ASM) Virtual driver Real sensors and ADAS ECUs Soft ECUs Vehicle dynamics Brake/engine torque, steering angle, Real-time HIL simulator 14
14 dspace HIL simulation technology for ADAS and autonomous driving Sensor system Sensor models Road, environment, driving maneuvers Automotive Simulation Models (ASM) Virtual driver Real sensors and ADAS ECUs Soft ECUs Vehicle dynamics Real-time HIL simulator 15
15 ASM Traffic and sensor models HIL or VEOS Simulink Traffic environment Idealized sensor data Error model (Noise, false positive/negative detections, ) Sensor data with realistic errors ASM 2-D contour sensor 3-D object sensor Sensor or customer specific implementation Integration of sensor-specific error models in Simulink possible due to open Automotive Simulation Models (ASM) Attribute sensor 16
16 Network Management Options for testing Sensor ECUs Opt. 5: Simulation over-the-air (OTA) OTA-Device Option 1 & 2 Technology independent approach Provide ideal ground truth based information Part of ASM Calculated on SCALEXIO CN (CPU) Option 3 & 4 Physics-based approach More related to the measurement principle of a sensor Calculated on GPU Option 5 Test Bench with real Sensor ECU 1) Automotive Real-Time Radar Scene Generator Opt. 4: Insert raw data Opt. 3: Insert target list Opt. 2: Insert Object list Opt. 1: Restbus Vehicle network Sensor Frontend Preprocessing Raw data Detection, Data Proc. Target list Object tracking Object list Application logic (Trajectory planning, Motion control) Sensor ECU Confidential, Information are subject to change without notice
17 Network Management Options for testing Sensor ECUs Opt. 5: Simulation over-the-air (OTA) OTA-Device Sensor Frontend Sensor ECU Option Camera Radar Lidar Ultrasonic Under development n/a n/a Under development 3D point cloud 5 ARSG 1) n/a n/a Opt. 4: Insert raw data Opt. 3: Insert target list Opt. 2: Insert Object list Opt. 1: Restbus Preprocessing Raw data Detection, Data Proc. Target list Object tracking Object list Application logic (Trajectory planning, Motion control) 1) Automotive Radar Scene Generator Vehicle network Confidential, Information are subject to change without notice

 with 1 ESI Unit 2 Up to 15.")
 FMC modules")
 Direct camera I/F (GMSL, FPD-Link III, Ethernet AVB")
 for short range video interfaces")
 support: Up to 20 bit 1 Feedback")
 from ESI Unit Both Open")
18 Raw Sensor Data Generation Environment Sensor Interface Unit Powerful high-end FPGA Xilinx Zynq UltraScale+ (MPSoC ZU9) Synchronous output for >8 sensors (Cameras/Radar 1 /Lidar 1 ) with 1 ESI Unit 2 Up to 15.9 Gbit/s aggregated data rate FPGA model (partly) open for customers (VHDL, Verilog, XSG, and HLS) FMC modules Flexible adaption of video interfaces via plug-in modules (FMC) Direct camera I/F (GMSL, FPD-Link III, Ethernet AVB 1 & GigE Vision 1 ) Customer-specific interfaces ESI Unit Plug-on Device (POD) for short range video interfaces parallel, HiSPI, CSI2, LVDS, etc. High dynamic range (HDR) support: Up to 20 bit 1 Feedback channel to ECUs (e.g. field of view, exposure time, ) from ESI Unit Both Open loop and closed loop testing with the ESI 1 Under Development 2 Depending on customer setup Confidential



19 Camera Image Sensor Lens Imager Image processing Bayer Pattern (RGGB) Register Interface I²C Source: Source:

20 ESI Unit: FPGA Firmware Overview Environment Sensor Interface Unit (Xilinx Zynq ZU9EG FPGA) Ethernet 4x ARM Cortex A53 Linux Pixel Pipeline Control HDMI Input Video Input Bayer Pattern Pixel Pipeline Aurora Gain FIU Aurora Output ESI POD Camera ECU Video Data Configuration & Control Confidential

21 ESI Unit: FPGA Firmware Overview Environment Sensor Interface Unit (Xilinx Zynq ZU9EG FPGA) Ethernet 4x ARM Cortex A53 Linux HDMI Input Video Input Pixel Pipeline Aurora Output Aurora ESI POD Camera ECU Video Data Configuration & Control Confidential
22 ESI Unit: FPGA Firmware Overview Environment Sensor Interface Unit (Xilinx Zynq ZU9EG FPGA) Ethernet 4x ARM Cortex A53 Linux Radar Pipeline GMSL Output GMSL Radar ECU HDMI Input Video Input Video Splitter Pixel Pipeline Aurora Output Aurora ESI POD Camera ECU Pixel Pipeline GMSL Output GMSL Camera ECU Radar Data Video Data Configuration & Control Confidential
23 Raw Data Generation for Cameras MotionDesk and multiple sensor models (Camera, Radar, Lidar) PREVIEW ModelDesk ASM Front camera Rear camera Control data Laser scanner Sensor composition combining multiple sensor outputs incl. meta-data ESI Unit HDMI Ethernet PC with graphics card and MotionDesk Rest bus simulation Vehicle network Confidential
24 Raw Data Generation for Cameras MotionDesk and multiple sensor models (Camera, Radar, Lidar) PREVIEW ModelDesk ASM Front camera Rear camera Control data Laser scanner Sensor composition combining multiple sensor outputs incl. meta-data CN+GPU SensorSim HDMI Ethernet ESI Unit Rest bus simulation Vehicle network Confidential
 Environment Sensor Interface POD (FPGA) Sensor Frontend Preprocessing")
25 Product ECU spec. project Network Management Overview Option 3 & 4 HIL - today ESI Unit PODs FPGA Firmware Environment Sensor Interface Unit (FPGA) Environment Sensor Interface POD (FPGA) Sensor Frontend Preprocessing Sensor ECU Raw data Ethernet HDMI Detection, Data Proc. Target list High-end PC and GPU (Windows) MotionDesk Host Ethernet / IOCNet Environment Sensor Simulation Automotive Simulation Models (ASM, SCALEXIO CN) Object tracking Object list Application logic (Trajectory planning, Motion control) 29 Confidential

26 VEOS Realistic simulations of ADAS and automated driving functions on standard PCs 35


27 Sensor simulation HIL and SIL PREVIEW Integrated toolchain for SIL and HIL use cases Many sensor technologies are adressed Five options to test a sensor toolchain Toolchain with low latency and synchronization Use of several GPUs is planned API to integrate custom models is planned 38
28 TESTING PROCESS AND AUTONOMOUS AUTOMATION






29 AutomationDesk Testing and Test Tools Various methods of Test Development Signal-based testing, XML and xil-api Open Standards Manage all tools in the ADAS Testing Process fit for purpose for developing safety related software according to IEC and ISO pre-qualified for all ASILs according to ISO

30 Real-Time Testing Standard PC Real-time test programming via Python scripts (with use of specific RTT Libraries) Real-Time Test management (download, start, stop, pause...) Real-time platform or VEOS Execution/Scheduling of Python real-time tests Synchronization between real-time tests and Simulink model 41
 Test specification (informal, structured)")
 Textual requirements => Formalized requirements => Simulation based")


31 Observers and the RTT Observer Library Coupling of BTC Embedded Specifier and dspace Systems Requirements (textual) Test specification (informal, structured) EmbeddedSpecifier Observer Download Observer Passed/Failed Req-Coverage Simulator (VEOS / HIL) Textual requirements => Formalized requirements => Simulation based formal verification (~ISO26262) Permanent verification of safety-critical requirements with observers, e.g. in parallel to execution of classic AutomationDesk tests Drastic increase in test depth and coverage for safety-critical functions Many additional benefits for test automation users Requirements (formalized) RTT-Observer 42
32 Test Management for ADAS: Keeping Track of Testing Activities Traceability and Coverage Traceability from requirement to test result and overall requirements coverage For all types of requirements, e.g. safety, functional, performance or robustness requirements Test Scenario Traceability Which test scenario is tested by which tests? Has a given test scenario been tested successfully? Monitor progress across multiple test platforms and different test tools For tests by means of simulation (MIL/SIL/HIL) as well as real-world tests Test reports, results overviews and test evaluation Test Stimuli Traceability Which parameters and inputs were used for which tests during a test execution? 43



33 SYNECT Test Management Manage all MIL/SIL/HIL Testing 1. Requirement integration and coverage analysis - Connect to PLM/ALM Tools 2. Off-the-shelf integration with common test tools such as AutomationDesk, Simulink, and BTC EmbeddedTester 3. Open interface to connect other test tools or custom test solutions 4. Monitor, analyze, visualize test results during the test process 5. Dynamic Test Parameterization handle ADAS model/test functionality 44

34 Integrated Tool Chain for Testing by Means of Simulation Euro NCAP AEB Use Case Automatically execute Euro NCAP tests and generate score results Automated parameterization, execution and evaluation of Euro NCAP tests Example AutomationDesk NCAP AEB Test Demo available online Solutions for all NCAP tests available as an engineering service 45

35 Test Automation (TA) Framework Test Cases Test Management Project Test Steps Manager SYNECT Project Navigator 46
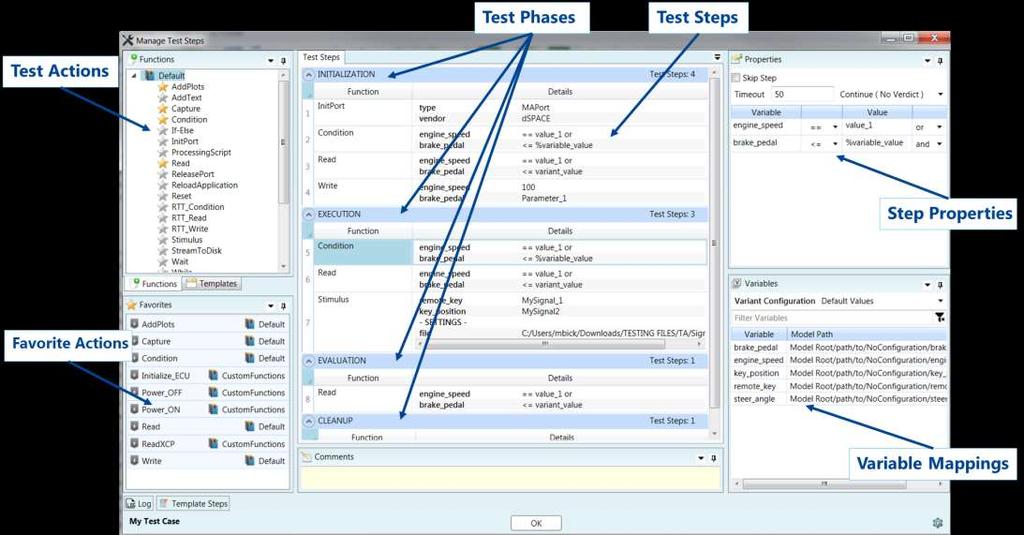

36 Test Automation (TA) Framework 47

 SYNECT Test Management Real")
37 PC cluster simulation with Virtual ECUs Driving millions of kilometers on your PC Testing at an early development stage Highly scalable due to virtual ECUs Deterministic and reproducible test execution High test throughput through fast test execution Simulation Cluster open to Integrate with test generation methods Cloud computing options Simulation Cluster leverages SIL tool chain in general (VEOS, xil-api, ASM) SYNECT Test Management Real Time Testing 50

38 Cluster Test Management with dspace SYNECT 51

 Offload test analysis from Test")

39 Parallel Testing and Execution Management Plan and schedule test cases and assign to specific cores (efficiency of multi-core testing) Offload test analysis from Test resources (test resource efficiency) Future auto-optimization and API for schedule/sequence customization 53

40 Optimizing HIL Testing Time Master Data Manager SYNECT Execution Iteration Test Case mins 2 mins HIL Time HIL PC Test case 1 Test case 2 Test case 3 Captured Data Results EXECUTION Test case 4....mat /.mf4 1.mat /.mf4 2 Passed Failed 4 mins EVALUATION Offline PC Post-Processing Offline PC Iteration Test case 1 Test case 2.mat /.mf4 3.mat /.mf4 4 Passed Passed Test case 3 Test case
41 SUMMARY



42 One Tool Chain for ADAS/AV Testing ISO ready. Prequalified for all ASILs 56

43 Sensors Algorithms dspace - The Right Partner for Autonomous Driving Prototyping Simulation Validation Virtual test drives Exhaustive testing 57 dspace-internal
44 Thanks for listening! Copyright 2017, dspace Inc. All rights reserved. Written permission is required for reproduction of all or parts of this publication. The source must be stated in any such reproduction. This publication and the contents hereof are subject to change without notice. Benchmark results are based on a specific application. Results are generally not transferrable to other applications. Brand names or product names are trademarks or registered trademarks of their respective companies or organizations. 58
45
ADAS/AD Challenge. Copyright 2017, dspace GmbH
 ADAS/AD Challenge 2 dspace Automotive Simulation Models (ASM) for ADAS and AD Michael Peperhowe, Group Manager ASM VD & Traffic dspace GmbH Rathenaustr. 26 33102 Paderborn Germany 3 ASM Overview 4 ASM
ADAS/AD Challenge 2 dspace Automotive Simulation Models (ASM) for ADAS and AD Michael Peperhowe, Group Manager ASM VD & Traffic dspace GmbH Rathenaustr. 26 33102 Paderborn Germany 3 ASM Overview 4 ASM
David Howarth. Business Development Manager Americas
 David Howarth Business Development Manager Americas David Howarth IPG Automotive USA, Inc. Business Development Manager Americas david.howarth@ipg-automotive.com ni.com Testing Automated Driving Functions
David Howarth Business Development Manager Americas David Howarth IPG Automotive USA, Inc. Business Development Manager Americas david.howarth@ipg-automotive.com ni.com Testing Automated Driving Functions
MotionDesk. 3-D online animation of simulated mechanical systems in real time. Highlights
 MotionDesk 3-D online animation of simulated mechanical systems in real time Highlights Tight integration to ModelDesk and ASM Enhanced support for all aspects of advanced driver assistance systems (ADAS)
MotionDesk 3-D online animation of simulated mechanical systems in real time Highlights Tight integration to ModelDesk and ASM Enhanced support for all aspects of advanced driver assistance systems (ADAS)
Physics Based Sensor simulation
 Physics Based Sensor simulation Jordan Gorrochotegui - Product Manager Software and Services Mike Phillips Software Engineer Restricted Siemens AG 2017 Realize innovation. Siemens offers solutions across
Physics Based Sensor simulation Jordan Gorrochotegui - Product Manager Software and Services Mike Phillips Software Engineer Restricted Siemens AG 2017 Realize innovation. Siemens offers solutions across
Virtual testing by coupling high fidelity vehicle simulation with microscopic traffic flow simulation
 DYNA4 with DYNAanimation in Co-Simulation with SUMO vehicle under test Virtual testing by coupling high fidelity vehicle simulation with microscopic traffic flow simulation Dr.-Ing. Jakob Kaths TESIS GmbH
DYNA4 with DYNAanimation in Co-Simulation with SUMO vehicle under test Virtual testing by coupling high fidelity vehicle simulation with microscopic traffic flow simulation Dr.-Ing. Jakob Kaths TESIS GmbH
Virtual Validation with dspace Benefits the whole ECU development process
 www.dspace.com Virtual Validation with dspace Benefits the whole ECU development process Virtual Validation / Content Virtual Validation Virtual Validation 3 Definition of a Virtual ECU 4 Tool Chain for
www.dspace.com Virtual Validation with dspace Benefits the whole ECU development process Virtual Validation / Content Virtual Validation Virtual Validation 3 Definition of a Virtual ECU 4 Tool Chain for
VSI Labs The Build Up of Automated Driving
 VSI Labs The Build Up of Automated Driving October - 2017 Agenda Opening Remarks Introduction and Background Customers Solutions VSI Labs Some Industry Content Opening Remarks Automated vehicle systems
VSI Labs The Build Up of Automated Driving October - 2017 Agenda Opening Remarks Introduction and Background Customers Solutions VSI Labs Some Industry Content Opening Remarks Automated vehicle systems
Combining ROS and AI for fail-operational automated driving
 Combining ROS and AI for fail-operational automated driving Prof. Dr. Daniel Watzenig Virtual Vehicle Research Center, Graz, Austria and Institute of Automation and Control at Graz University of Technology
Combining ROS and AI for fail-operational automated driving Prof. Dr. Daniel Watzenig Virtual Vehicle Research Center, Graz, Austria and Institute of Automation and Control at Graz University of Technology
Significant Reduction of Validation Efforts for Dynamic Light Functions with FMI for Multi-Domain Integration and Test Platforms
 Significant Reduction of Validation Efforts for Dynamic Light Functions with FMI for Multi-Domain Integration and Test Platforms Dr. Stefan-Alexander Schneider Johannes Frimberger BMW AG, 80788 Munich,
Significant Reduction of Validation Efforts for Dynamic Light Functions with FMI for Multi-Domain Integration and Test Platforms Dr. Stefan-Alexander Schneider Johannes Frimberger BMW AG, 80788 Munich,
Automated Driving Systems with Model-Based Design for ISO 26262:2018 and SOTIF
 Automated Driving Systems with Model-Based Design for ISO 26262:2018 and SOTIF Konstantin Dmitriev The MathWorks, Inc. Certification and Standards Group 2018 The MathWorks, Inc. 1 Agenda Use of simulation
Automated Driving Systems with Model-Based Design for ISO 26262:2018 and SOTIF Konstantin Dmitriev The MathWorks, Inc. Certification and Standards Group 2018 The MathWorks, Inc. 1 Agenda Use of simulation
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS. Sergii Bykov Technical Lead Machine Learning 12 Oct 2017
 23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
ADAS Development using Advanced Real-Time All-in-the-Loop Simulators. Roberto De Vecchi VI-grade Enrico Busto - AddFor
 ADAS Development using Advanced Real-Time All-in-the-Loop Simulators Roberto De Vecchi VI-grade Enrico Busto - AddFor The Scenario The introduction of ADAS and AV has created completely new challenges
ADAS Development using Advanced Real-Time All-in-the-Loop Simulators Roberto De Vecchi VI-grade Enrico Busto - AddFor The Scenario The introduction of ADAS and AV has created completely new challenges
Video Injection Methods in a Real-world Vehicle for Increasing Test Efficiency
 DEVELOPMENT SIMUL ATION AND TESTING Video Injection Methods in a Real-world Vehicle for Increasing Test Efficiency IPG Automotive AUTHORS For the testing of camera-based driver assistance systems under
DEVELOPMENT SIMUL ATION AND TESTING Video Injection Methods in a Real-world Vehicle for Increasing Test Efficiency IPG Automotive AUTHORS For the testing of camera-based driver assistance systems under
The Building Blocks of Autonomous Control. Phil Magney, Founder & Principal Advisor July 2016
 The Building Blocks of Autonomous Control Phil Magney, Founder & Principal Advisor July 2016 Agenda VSI Remarks The Building Blocks of Autonomy Elements of Autonomous Control Motion Control (path, maneuver,
The Building Blocks of Autonomous Control Phil Magney, Founder & Principal Advisor July 2016 Agenda VSI Remarks The Building Blocks of Autonomy Elements of Autonomous Control Motion Control (path, maneuver,
Virtual Testing of Autonomous Vehicles
 Virtual Testing of Autonomous Vehicles Mike Dempsey Claytex Services Limited Software, Consultancy, Training Based in Leamington Spa, UK Office in Cape Town, South Africa Experts in Systems Engineering,
Virtual Testing of Autonomous Vehicles Mike Dempsey Claytex Services Limited Software, Consultancy, Training Based in Leamington Spa, UK Office in Cape Town, South Africa Experts in Systems Engineering,
interactive IP: Perception platform and modules
 interactive IP: Perception platform and modules Angelos Amditis, ICCS 19 th ITS-WC-SIS76: Advanced integrated safety applications based on enhanced perception, active interventions and new advanced sensors
interactive IP: Perception platform and modules Angelos Amditis, ICCS 19 th ITS-WC-SIS76: Advanced integrated safety applications based on enhanced perception, active interventions and new advanced sensors
Perception platform and fusion modules results. Angelos Amditis - ICCS and Lali Ghosh - DEL interactive final event
 Perception platform and fusion modules results Angelos Amditis - ICCS and Lali Ghosh - DEL interactive final event 20 th -21 st November 2013 Agenda Introduction Environment Perception in Intelligent Transport
Perception platform and fusion modules results Angelos Amditis - ICCS and Lali Ghosh - DEL interactive final event 20 th -21 st November 2013 Agenda Introduction Environment Perception in Intelligent Transport
Volkswagen Group: Leveraging VIRES VTD to Design a Cooperative Driver Assistance System
 Volkswagen Group: Leveraging VIRES VTD to Design a Cooperative Driver Assistance System By Dr. Kai Franke, Development Online Driver Assistance Systems, Volkswagen AG 10 Engineering Reality Magazine A
Volkswagen Group: Leveraging VIRES VTD to Design a Cooperative Driver Assistance System By Dr. Kai Franke, Development Online Driver Assistance Systems, Volkswagen AG 10 Engineering Reality Magazine A
Industrial Keynotes. 06/09/2018 Juan-Les-Pins
 Industrial Keynotes 1 06/09/2018 Juan-Les-Pins Agenda 1. The End of Driving Simulation? 2. Autonomous Vehicles: the new UI 3. Augmented Realities 4. Choose your factions 5. No genuine AI without flawless
Industrial Keynotes 1 06/09/2018 Juan-Les-Pins Agenda 1. The End of Driving Simulation? 2. Autonomous Vehicles: the new UI 3. Augmented Realities 4. Choose your factions 5. No genuine AI without flawless
Next-generation automotive image processing with ARM Mali-C71
 Next-generation automotive image processing with ARM Mali-C71 Chris Turner Director, Advanced Technology Marketing CPU Group, ARM ARM Tech Forum Korea June 28 th 2017 Pioneers in imaging and vision signal
Next-generation automotive image processing with ARM Mali-C71 Chris Turner Director, Advanced Technology Marketing CPU Group, ARM ARM Tech Forum Korea June 28 th 2017 Pioneers in imaging and vision signal
Model-Based Design as an Enabler for Supply Chain Collaboration
 CO-DEVELOPMENT MANUFACTURING INNOVATION & SUPPORT Model-Based Design as an Enabler for Supply Chain Collaboration Richard Mijnheer, CEO, 3T Stephan van Beek, Technical Manager, MathWorks Richard Mijnheer
CO-DEVELOPMENT MANUFACTURING INNOVATION & SUPPORT Model-Based Design as an Enabler for Supply Chain Collaboration Richard Mijnheer, CEO, 3T Stephan van Beek, Technical Manager, MathWorks Richard Mijnheer
The Denali-MC HDR ISP Backgrounder
 The Denali-MC HDR ISP Backgrounder 2-4 brackets up to 8 EV frame offset Up to 16 EV stops for output HDR LATM (tone map) up to 24 EV Noise reduction due to merging of 10 EV LDR to a single 16 EV HDR up
The Denali-MC HDR ISP Backgrounder 2-4 brackets up to 8 EV frame offset Up to 16 EV stops for output HDR LATM (tone map) up to 24 EV Noise reduction due to merging of 10 EV LDR to a single 16 EV HDR up
Virtual Homologation of Software- Intensive Safety Systems: From ESC to Automated Driving
 Virtual Homologation of Software- Intensive Safety Systems: From ESC to Automated Driving Dr. Houssem Abdellatif Global Head Autonomous Driving & ADAS TÜV SÜD Auto Service Christian Gnandt Lead Engineer
Virtual Homologation of Software- Intensive Safety Systems: From ESC to Automated Driving Dr. Houssem Abdellatif Global Head Autonomous Driving & ADAS TÜV SÜD Auto Service Christian Gnandt Lead Engineer
SIS63-Building the Future-Advanced Integrated Safety Applications: interactive Perception platform and fusion modules results
 SIS63-Building the Future-Advanced Integrated Safety Applications: interactive Perception platform and fusion modules results Angelos Amditis (ICCS) and Lali Ghosh (DEL) 18 th October 2013 20 th ITS World
SIS63-Building the Future-Advanced Integrated Safety Applications: interactive Perception platform and fusion modules results Angelos Amditis (ICCS) and Lali Ghosh (DEL) 18 th October 2013 20 th ITS World
Industrial Applications and Challenges for Verifying Reactive Embedded Software. Tom Bienmüller, SC 2 Summer School, MPI Saarbrücken, August 2017
 Industrial Applications and Challenges for Verifying Reactive Embedded Software Tom Bienmüller, SC 2 Summer School, MPI Saarbrücken, August 2017 Agenda 2 Who am I? Who is BTC Embedded Systems? Formal Methods
Industrial Applications and Challenges for Verifying Reactive Embedded Software Tom Bienmüller, SC 2 Summer School, MPI Saarbrücken, August 2017 Agenda 2 Who am I? Who is BTC Embedded Systems? Formal Methods
ADAS COMPUTER VISION AND AUGMENTED REALITY SOLUTION
 ENGINEERING ENERGY TELECOM TRAVEL AND AVIATION SOFTWARE FINANCIAL SERVICES ADAS COMPUTER VISION AND AUGMENTED REALITY SOLUTION Sergii Bykov, Technical Lead TECHNOLOGY AUTOMOTIVE Product Vision Road To
ENGINEERING ENERGY TELECOM TRAVEL AND AVIATION SOFTWARE FINANCIAL SERVICES ADAS COMPUTER VISION AND AUGMENTED REALITY SOLUTION Sergii Bykov, Technical Lead TECHNOLOGY AUTOMOTIVE Product Vision Road To
Real-Time Testing Made Easy with Simulink Real-Time
 Real-Time Testing Made Easy with Simulink Real-Time Andreas Uschold Application Engineer MathWorks Martin Rosser Technical Sales Engineer Speedgoat 2015 The MathWorks, Inc. 1 Model-Based Design Continuous
Real-Time Testing Made Easy with Simulink Real-Time Andreas Uschold Application Engineer MathWorks Martin Rosser Technical Sales Engineer Speedgoat 2015 The MathWorks, Inc. 1 Model-Based Design Continuous
Method and Tools Specifications
 Method and Tools Deliverable n. D1.3.2 Method and Tools Sub Project SP1 Requirements and Workpackage WP1.2 Requirements Task n. T1.3.2 Method and Tools Authors N. Pallaro A. Ghiro CRF CRF File name Status
Method and Tools Deliverable n. D1.3.2 Method and Tools Sub Project SP1 Requirements and Workpackage WP1.2 Requirements Task n. T1.3.2 Method and Tools Authors N. Pallaro A. Ghiro CRF CRF File name Status
Next-generation automotive image processing with ARM Mali-C71
 Next-generation automotive image processing with ARM Mali-C71 Steve Steele Director, Product Marketing Imaging & Vision Group, ARM ARM Tech Forum Taipei July 4th 2017 Pioneers in imaging and vision 2 Automotive
Next-generation automotive image processing with ARM Mali-C71 Steve Steele Director, Product Marketing Imaging & Vision Group, ARM ARM Tech Forum Taipei July 4th 2017 Pioneers in imaging and vision 2 Automotive
DLR s ROboMObil HIL Simulator Using FMI 2.0 Technology on dspace SCALEXIO Real-time Hardware. Andreas Pillekeit - dspace. Jonathan Brembeck DLR
 DLR.de Chart 1 DLR s ROboMObil HIL Simulator Using FMI 2.0 Technology on dspace SCALEXIO Real-time Hardware FMI User Meeting at the Modelica Conference 2017 Jonathan Brembeck DLR Andreas Pillekeit - dspace
DLR.de Chart 1 DLR s ROboMObil HIL Simulator Using FMI 2.0 Technology on dspace SCALEXIO Real-time Hardware FMI User Meeting at the Modelica Conference 2017 Jonathan Brembeck DLR Andreas Pillekeit - dspace
Using FMI/ SSP for Development of Autonomous Driving
 Using FMI/ SSP for Development of Autonomous Driving presented by Jochen Köhler (ZF) FMI User Meeting 15.05.2017 Prague / Czech Republic H.M. Heinkel S.Rude P. R. Mai J. Köhler M. Rühl / A. Pillekeit Motivation
Using FMI/ SSP for Development of Autonomous Driving presented by Jochen Köhler (ZF) FMI User Meeting 15.05.2017 Prague / Czech Republic H.M. Heinkel S.Rude P. R. Mai J. Köhler M. Rühl / A. Pillekeit Motivation
Final Report Non Hit Car And Truck
 Final Report Non Hit Car And Truck 2010-2013 Project within Vehicle and Traffic Safety Author: Anders Almevad Date 2014-03-17 Content 1. Executive summary... 3 2. Background... 3. Objective... 4. Project
Final Report Non Hit Car And Truck 2010-2013 Project within Vehicle and Traffic Safety Author: Anders Almevad Date 2014-03-17 Content 1. Executive summary... 3 2. Background... 3. Objective... 4. Project
A Winning Combination
 A Winning Combination Risk factors Statements in this presentation that refer to future plans and expectations are forward-looking statements that involve a number of risks and uncertainties. Words such
A Winning Combination Risk factors Statements in this presentation that refer to future plans and expectations are forward-looking statements that involve a number of risks and uncertainties. Words such
A SERVICE-ORIENTED SYSTEM ARCHITECTURE FOR THE HUMAN CENTERED DESIGN OF INTELLIGENT TRANSPORTATION SYSTEMS
 Tools and methodologies for ITS design and drivers awareness A SERVICE-ORIENTED SYSTEM ARCHITECTURE FOR THE HUMAN CENTERED DESIGN OF INTELLIGENT TRANSPORTATION SYSTEMS Jan Gačnik, Oliver Häger, Marco Hannibal
Tools and methodologies for ITS design and drivers awareness A SERVICE-ORIENTED SYSTEM ARCHITECTURE FOR THE HUMAN CENTERED DESIGN OF INTELLIGENT TRANSPORTATION SYSTEMS Jan Gačnik, Oliver Häger, Marco Hannibal
products PC Control
 products PC Control 04 2017 PC Control 04 2017 products Image processing directly in the PLC TwinCAT Vision Machine vision easily integrated into automation technology Automatic detection, traceability
products PC Control 04 2017 PC Control 04 2017 products Image processing directly in the PLC TwinCAT Vision Machine vision easily integrated into automation technology Automatic detection, traceability
Autonomous driving made safe
 tm Autonomous driving made safe Founder, Bio Celite Milbrandt Austin, Texas since 1998 Founder of Slacker Radio In dash for Tesla, GM, and Ford. 35M active users 2008 Chief Product Officer of RideScout
tm Autonomous driving made safe Founder, Bio Celite Milbrandt Austin, Texas since 1998 Founder of Slacker Radio In dash for Tesla, GM, and Ford. 35M active users 2008 Chief Product Officer of RideScout
Visione per il veicolo Paolo Medici 2017/ Visual Perception
 Visione per il veicolo Paolo Medici 2017/2018 02 Visual Perception Today Sensor Suite for Autonomous Vehicle ADAS Hardware for ADAS Sensor Suite Which sensor do you know? Which sensor suite for Which algorithms
Visione per il veicolo Paolo Medici 2017/2018 02 Visual Perception Today Sensor Suite for Autonomous Vehicle ADAS Hardware for ADAS Sensor Suite Which sensor do you know? Which sensor suite for Which algorithms
Tsuyoshi Sato PIONEER CORPORATION July 6, 2017
 Technology R&D for for Highly Highly Automated Automated Driving Driving Tsuyoshi Sato PIONEER CORPORATION July 6, 2017 Agenda Introduction Overview Architecture R&D for Highly Automated Driving Hardware
Technology R&D for for Highly Highly Automated Automated Driving Driving Tsuyoshi Sato PIONEER CORPORATION July 6, 2017 Agenda Introduction Overview Architecture R&D for Highly Automated Driving Hardware
PEGASUS Effectively ensuring automated driving. Prof. Dr.-Ing. Karsten Lemmer April 6, 2017
 PEGASUS Effectively ensuring automated driving. Prof. Dr.-Ing. Karsten Lemmer April 6, 2017 Starting Position for Automated Driving Top issue! Technology works Confidence Testing differently automated
PEGASUS Effectively ensuring automated driving. Prof. Dr.-Ing. Karsten Lemmer April 6, 2017 Starting Position for Automated Driving Top issue! Technology works Confidence Testing differently automated
Intelligent driving TH« TNO I Innovation for live
 Intelligent driving TNO I Innovation for live TH«Intelligent Transport Systems have become an integral part of the world. In addition to the current ITS systems, intelligent vehicles can make a significant
Intelligent driving TNO I Innovation for live TH«Intelligent Transport Systems have become an integral part of the world. In addition to the current ITS systems, intelligent vehicles can make a significant
Fusion in EU projects and the Perception Approach. Dr. Angelos Amditis interactive Summer School 4-6 July, 2012
 Fusion in EU projects and the Perception Approach Dr. Angelos Amditis interactive Summer School 4-6 July, 2012 Content Introduction Data fusion in european research projects EUCLIDE PReVENT-PF2 SAFESPOT
Fusion in EU projects and the Perception Approach Dr. Angelos Amditis interactive Summer School 4-6 July, 2012 Content Introduction Data fusion in european research projects EUCLIDE PReVENT-PF2 SAFESPOT
Hardware Implementation of Automatic Control Systems using FPGAs
 Hardware Implementation of Automatic Control Systems using FPGAs Lecturer PhD Eng. Ionel BOSTAN Lecturer PhD Eng. Florin-Marian BÎRLEANU Romania Disclaimer: This presentation tries to show the current
Hardware Implementation of Automatic Control Systems using FPGAs Lecturer PhD Eng. Ionel BOSTAN Lecturer PhD Eng. Florin-Marian BÎRLEANU Romania Disclaimer: This presentation tries to show the current
Advanced Tools for Graphical Authoring of Dynamic Virtual Environments at the NADS
 Advanced Tools for Graphical Authoring of Dynamic Virtual Environments at the NADS Matt Schikore Yiannis E. Papelis Ginger Watson National Advanced Driving Simulator & Simulation Center The University
Advanced Tools for Graphical Authoring of Dynamic Virtual Environments at the NADS Matt Schikore Yiannis E. Papelis Ginger Watson National Advanced Driving Simulator & Simulation Center The University
Software Computer Vision - Driver Assistance
 Software Computer Vision - Driver Assistance Work @Bosch for developing desktop, web or embedded software and algorithms / computer vision / artificial intelligence for Driver Assistance Systems and Automated
Software Computer Vision - Driver Assistance Work @Bosch for developing desktop, web or embedded software and algorithms / computer vision / artificial intelligence for Driver Assistance Systems and Automated
Automotive Needs and Expectations towards Next Generation Driving Simulation
 Automotive Needs and Expectations towards Next Generation Driving Simulation Dr. Hans-Peter Schöner - Insight fromoutside -Consulting - Senior Automotive Expert, Driving Simulation Association September
Automotive Needs and Expectations towards Next Generation Driving Simulation Dr. Hans-Peter Schöner - Insight fromoutside -Consulting - Senior Automotive Expert, Driving Simulation Association September
CarSim/TruckSim/BikeSim Real-Time Hardware In the Loop Mechanical Simulation Corporation
 CarSim/TruckSim/BikeSim Real-Time Hardware In the Loop Mechanical Simulation Corporation www.carsim.com What is Hardware In the Loop (HIL)? Pure Simulation Software In the Loop (SIL) Plant Model Simulation
CarSim/TruckSim/BikeSim Real-Time Hardware In the Loop Mechanical Simulation Corporation www.carsim.com What is Hardware In the Loop (HIL)? Pure Simulation Software In the Loop (SIL) Plant Model Simulation
Building a Computer Vision Research Vehicle with ROS
 Building a Computer Vision Research Vehicle with ROS ROSCon 2017 2017-09-21 Vancouver Andreas Fregin, Markus Roth, Markus Braun, Sebastian Krebs & Fabian Flohr Agenda 1. Introduction 2. History 3. Triggering
Building a Computer Vision Research Vehicle with ROS ROSCon 2017 2017-09-21 Vancouver Andreas Fregin, Markus Roth, Markus Braun, Sebastian Krebs & Fabian Flohr Agenda 1. Introduction 2. History 3. Triggering
Autonomous Vehicle Simulation (MDAS.ai)
") Autonomous Vehicle Simulation (MDAS.ai) Sridhar Lakshmanan Department of Electrical & Computer Engineering University of Michigan - Dearborn Presentation for Physical Systems Replication Panel NDIA Cyber-Enabled
Autonomous Vehicle Simulation (MDAS.ai) Sridhar Lakshmanan Department of Electrical & Computer Engineering University of Michigan - Dearborn Presentation for Physical Systems Replication Panel NDIA Cyber-Enabled
HAVEit Highly Automated Vehicles for Intelligent Transport
 HAVEit Highly Automated Vehicles for Intelligent Transport Holger Zeng Project Manager CONTINENTAL AUTOMOTIVE HAVEit General Information Project full title: Highly Automated Vehicles for Intelligent Transport
HAVEit Highly Automated Vehicles for Intelligent Transport Holger Zeng Project Manager CONTINENTAL AUTOMOTIVE HAVEit General Information Project full title: Highly Automated Vehicles for Intelligent Transport
Developing a New Type of Light System in an Automobile and Implementing Its Prototype. on Hazards
 page Seite 12 KIT Developing a New Type of Light System in an Automobile and Implementing Its Prototype Spotlight on Hazards An innovative new light function offers motorists more safety and comfort during
page Seite 12 KIT Developing a New Type of Light System in an Automobile and Implementing Its Prototype Spotlight on Hazards An innovative new light function offers motorists more safety and comfort during
CONFIGURATION AND GENERATION OF ROAD SEGMENTS AND JUNCTIONS FOR VERIFICATION OF AUTONOMOUS SYSTEMS
 CONFIGURATION AND GENERATION OF ROAD SEGMENTS AND JUNCTIONS FOR VERIFICATION OF AUTONOMOUS SYSTEMS Kick-Off Workshop ASAM OpenDRIVE 2018-10 Martin Herrmann, Martin Butz Bosch Corporate Research Verification
CONFIGURATION AND GENERATION OF ROAD SEGMENTS AND JUNCTIONS FOR VERIFICATION OF AUTONOMOUS SYSTEMS Kick-Off Workshop ASAM OpenDRIVE 2018-10 Martin Herrmann, Martin Butz Bosch Corporate Research Verification
ARMY RDT&E BUDGET ITEM JUSTIFICATION (R2 Exhibit)
") Exhibit R-2 0602308A Advanced Concepts and Simulation ARMY RDT&E BUDGET ITEM JUSTIFICATION (R2 Exhibit) FY 2005 FY 2006 FY 2007 FY 2008 FY 2009 FY 2010 FY 2011 Total Program Element (PE) Cost 22710 27416
Exhibit R-2 0602308A Advanced Concepts and Simulation ARMY RDT&E BUDGET ITEM JUSTIFICATION (R2 Exhibit) FY 2005 FY 2006 FY 2007 FY 2008 FY 2009 FY 2010 FY 2011 Total Program Element (PE) Cost 22710 27416
Vision with Precision Webinar Series Augmented & Virtual Reality Aaron Behman, Xilinx Mark Beccue, Tractica. Copyright 2016 Xilinx
 Vision with Precision Webinar Series Augmented & Virtual Reality Aaron Behman, Xilinx Mark Beccue, Tractica Xilinx Vision with Precision Webinar Series Perceiving Environment / Taking Action: AR / VR Monitoring
Vision with Precision Webinar Series Augmented & Virtual Reality Aaron Behman, Xilinx Mark Beccue, Tractica Xilinx Vision with Precision Webinar Series Perceiving Environment / Taking Action: AR / VR Monitoring
Credible Autocoding for Verification of Autonomous Systems. Juan-Pablo Afman Graduate Researcher Georgia Institute of Technology
 Credible Autocoding for Verification of Autonomous Systems Juan-Pablo Afman Graduate Researcher Georgia Institute of Technology Agenda 2 Introduction Expert s Domain Next Generation Autocoding Formal methods
Credible Autocoding for Verification of Autonomous Systems Juan-Pablo Afman Graduate Researcher Georgia Institute of Technology Agenda 2 Introduction Expert s Domain Next Generation Autocoding Formal methods
Automated Testing of Autonomous Driving Assistance Systems
 Automated Testing of Autonomous Driving Assistance Systems Lionel Briand Vector Testing Symposium, Stuttgart, 2018 SnT Centre Top level research in Information & Communication Technologies Created to fuel
Automated Testing of Autonomous Driving Assistance Systems Lionel Briand Vector Testing Symposium, Stuttgart, 2018 SnT Centre Top level research in Information & Communication Technologies Created to fuel
Choosing the Optimum Mix of Sensors for Driver Assistance and Autonomous Vehicles
 Choosing the Optimum Mix of Sensors for Driver Assistance and Autonomous Vehicles Ali Osman Ors May 2, 2017 Copyright 2017 NXP Semiconductors 1 Sensing Technology Comparison Rating: H = High, M=Medium,
Choosing the Optimum Mix of Sensors for Driver Assistance and Autonomous Vehicles Ali Osman Ors May 2, 2017 Copyright 2017 NXP Semiconductors 1 Sensing Technology Comparison Rating: H = High, M=Medium,
Qosmotec. Software Solutions GmbH. Technical Overview. QPER C2X - Car-to-X Signal Strength Emulator and HiL Test Bench. Page 1
 Qosmotec Software Solutions GmbH Technical Overview QPER C2X - Page 1 TABLE OF CONTENTS 0 DOCUMENT CONTROL...3 0.1 Imprint...3 0.2 Document Description...3 1 SYSTEM DESCRIPTION...4 1.1 General Concept...4
Qosmotec Software Solutions GmbH Technical Overview QPER C2X - Page 1 TABLE OF CONTENTS 0 DOCUMENT CONTROL...3 0.1 Imprint...3 0.2 Document Description...3 1 SYSTEM DESCRIPTION...4 1.1 General Concept...4
Intelligent Technology for More Advanced Autonomous Driving
 FEATURED ARTICLES Autonomous Driving Technology for Connected Cars Intelligent Technology for More Advanced Autonomous Driving Autonomous driving is recognized as an important technology for dealing with
FEATURED ARTICLES Autonomous Driving Technology for Connected Cars Intelligent Technology for More Advanced Autonomous Driving Autonomous driving is recognized as an important technology for dealing with
Getting to Smart Paul Barnard Design Automation
 Getting to Smart Paul Barnard Design Automation paul.barnard@mathworks.com 2012 The MathWorks, Inc. Getting to Smart WHO WHAT HOW autonomous, responsive, multifunction, adaptive, transformable, and smart
Getting to Smart Paul Barnard Design Automation paul.barnard@mathworks.com 2012 The MathWorks, Inc. Getting to Smart WHO WHAT HOW autonomous, responsive, multifunction, adaptive, transformable, and smart
CS686: High-level Motion/Path Planning Applications
 CS686: High-level Motion/Path Planning Applications Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa Class Objectives Discuss my general research view on motion planning Discuss
CS686: High-level Motion/Path Planning Applications Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa Class Objectives Discuss my general research view on motion planning Discuss
CALL FOR PAPERS. embedded world Conference. -Embedded Intelligence- embedded world Conference Nürnberg, Germany
 13579 CALL FOR PAPERS embedded world Conference -Embedded Intelligence- embedded world Conference 26.-28.2.2019 Nürnberg, Germany www.embedded-world.eu IMPRESSIONS 2018 NuernbergMesse/Uwe Niklas embedded
13579 CALL FOR PAPERS embedded world Conference -Embedded Intelligence- embedded world Conference 26.-28.2.2019 Nürnberg, Germany www.embedded-world.eu IMPRESSIONS 2018 NuernbergMesse/Uwe Niklas embedded
FAIL OPERATIONAL E/E SYSTEM CONCEPT FOR FUTURE APPLICATION IN ADAS AND AUTONOMOUS DRIVING
 FAIL OPERATIONAL E/E SYSTEM CONCEPT FOR FUTURE APPLICATION IN ADAS AND AUTONOMOUS DRIVING Fail Safe Fail Operational Fault Tolerance ISO 26262 Hermann Kränzle, TÜV NORD Systems OUR FUNCTIONAL SAFETY CERTIFIED
FAIL OPERATIONAL E/E SYSTEM CONCEPT FOR FUTURE APPLICATION IN ADAS AND AUTONOMOUS DRIVING Fail Safe Fail Operational Fault Tolerance ISO 26262 Hermann Kränzle, TÜV NORD Systems OUR FUNCTIONAL SAFETY CERTIFIED
Evaluating Functional Safety in Automotive Image Sensors
 TND6233/D Rev. 1, MAY 2018 Evaluating Functional Safety in Automotive Image Sensors Semiconductor Components Industries, LLC, 2017 May, 2018 Rev. 1 1 Publication Order Number: TND6233/D Evaluating Functional
TND6233/D Rev. 1, MAY 2018 Evaluating Functional Safety in Automotive Image Sensors Semiconductor Components Industries, LLC, 2017 May, 2018 Rev. 1 1 Publication Order Number: TND6233/D Evaluating Functional
A NOVEL VISION SYSTEM-ON-CHIP FOR EMBEDDED IMAGE ACQUISITION AND PROCESSING
 A NOVEL VISION SYSTEM-ON-CHIP FOR EMBEDDED IMAGE ACQUISITION AND PROCESSING Neuartiges System-on-Chip für die eingebettete Bilderfassung und -verarbeitung Dr. Jens Döge, Head of Image Acquisition and Processing
A NOVEL VISION SYSTEM-ON-CHIP FOR EMBEDDED IMAGE ACQUISITION AND PROCESSING Neuartiges System-on-Chip für die eingebettete Bilderfassung und -verarbeitung Dr. Jens Döge, Head of Image Acquisition and Processing
Digital Engines for Smart and Connected Cars By Bob O Donnell, TECHnalysis Research Chief Analyst
 WHITE PAPER On Behalf of Digital Engines for Smart and Connected Cars By Bob O Donnell, TECHnalysis Research Chief Analyst SUMMARY Interest in advanced car electronics is extremely high, but there is a
WHITE PAPER On Behalf of Digital Engines for Smart and Connected Cars By Bob O Donnell, TECHnalysis Research Chief Analyst SUMMARY Interest in advanced car electronics is extremely high, but there is a
PerSEE: a Central Sensors Fusion Electronic Control Unit for the development of perception-based ADAS
 10-4 MVA2015 IAPR International Conference on Machine Vision Applications, May 18-22, 2015, Tokyo, JAPAN PerSEE: a Central Sensors Fusion Electronic Control Unit for the development of perception-based
10-4 MVA2015 IAPR International Conference on Machine Vision Applications, May 18-22, 2015, Tokyo, JAPAN PerSEE: a Central Sensors Fusion Electronic Control Unit for the development of perception-based
Model-Based Design for Sensor Systems
 2009 The MathWorks, Inc. Model-Based Design for Sensor Systems Stephanie Kwan Applications Engineer Agenda Sensor Systems Overview System Level Design Challenges Components of Sensor Systems Sensor Characterization
2009 The MathWorks, Inc. Model-Based Design for Sensor Systems Stephanie Kwan Applications Engineer Agenda Sensor Systems Overview System Level Design Challenges Components of Sensor Systems Sensor Characterization
Introduction to Systems Engineering
 p. 1/2 ENES 489P Hands-On Systems Engineering Projects Introduction to Systems Engineering Mark Austin E-mail: austin@isr.umd.edu Institute for Systems Research, University of Maryland, College Park Career
p. 1/2 ENES 489P Hands-On Systems Engineering Projects Introduction to Systems Engineering Mark Austin E-mail: austin@isr.umd.edu Institute for Systems Research, University of Maryland, College Park Career
Job Description. Commitment: Must be available to work full-time hours, M-F for weeks beginning Summer of 2018.
 Research Intern Director of Research We are seeking a summer intern to support the team to develop prototype 3D sensing systems based on state-of-the-art sensing technologies along with computer vision
Research Intern Director of Research We are seeking a summer intern to support the team to develop prototype 3D sensing systems based on state-of-the-art sensing technologies along with computer vision
LED flicker: Root cause, impact and measurement for automotive imaging applications
 https://doi.org/10.2352/issn.2470-1173.2018.17.avm-146 2018, Society for Imaging Science and Technology LED flicker: Root cause, impact and measurement for automotive imaging applications Brian Deegan;
https://doi.org/10.2352/issn.2470-1173.2018.17.avm-146 2018, Society for Imaging Science and Technology LED flicker: Root cause, impact and measurement for automotive imaging applications Brian Deegan;
Vehicle-to-X communication using millimeter waves
 Infrastructure Person Vehicle 5G Slides Robert W. Heath Jr. (2016) Vehicle-to-X communication using millimeter waves Professor Robert W. Heath Jr., PhD, PE mmwave Wireless Networking and Communications
Infrastructure Person Vehicle 5G Slides Robert W. Heath Jr. (2016) Vehicle-to-X communication using millimeter waves Professor Robert W. Heath Jr., PhD, PE mmwave Wireless Networking and Communications
ARGUING THE SAFETY OF MACHINE LEARNING FOR HIGHLY AUTOMATED DRIVING USING ASSURANCE CASES LYDIA GAUERHOF BOSCH CORPORATE RESEARCH
 ARGUING THE SAFETY OF MACHINE LEARNING FOR HIGHLY AUTOMATED DRIVING USING ASSURANCE CASES 14.12.2017 LYDIA GAUERHOF BOSCH CORPORATE RESEARCH Arguing Safety of Machine Learning for Highly Automated Driving
ARGUING THE SAFETY OF MACHINE LEARNING FOR HIGHLY AUTOMATED DRIVING USING ASSURANCE CASES 14.12.2017 LYDIA GAUERHOF BOSCH CORPORATE RESEARCH Arguing Safety of Machine Learning for Highly Automated Driving
Test And Validation: Coping With Complexity The state of play in vehicle software and system validation
 David Bailey, ETAS GmbH Test And Validation: Coping With Complexity The state of play in vehicle software and system validation 1 05.Jun.2008 Copyright 2004, ETAS GmbH LiveDevices Ltd. Vetronix Corp. All
David Bailey, ETAS GmbH Test And Validation: Coping With Complexity The state of play in vehicle software and system validation 1 05.Jun.2008 Copyright 2004, ETAS GmbH LiveDevices Ltd. Vetronix Corp. All
Investigating the Post Processing of LS-DYNA in a Fully Immersive Workflow Environment
 Investigating the Post Processing of LS-DYNA in a Fully Immersive Workflow Environment Ed Helwig 1, Facundo Del Pin 2 1 Livermore Software Technology Corporation, Livermore CA 2 Livermore Software Technology
Investigating the Post Processing of LS-DYNA in a Fully Immersive Workflow Environment Ed Helwig 1, Facundo Del Pin 2 1 Livermore Software Technology Corporation, Livermore CA 2 Livermore Software Technology
Aimetis Outdoor Object Tracker. 2.0 User Guide
 Aimetis Outdoor Object Tracker 0 User Guide Contents Contents Introduction...3 Installation... 4 Requirements... 4 Install Outdoor Object Tracker...4 Open Outdoor Object Tracker... 4 Add a license... 5...
Aimetis Outdoor Object Tracker 0 User Guide Contents Contents Introduction...3 Installation... 4 Requirements... 4 Install Outdoor Object Tracker...4 Open Outdoor Object Tracker... 4 Add a license... 5...
Road Boundary Estimation in Construction Sites Michael Darms, Matthias Komar, Dirk Waldbauer, Stefan Lüke
 Road Boundary Estimation in Construction Sites Michael Darms, Matthias Komar, Dirk Waldbauer, Stefan Lüke Lanes in Construction Sites Roadway is often bounded by elevated objects (e.g. guidance walls)
Road Boundary Estimation in Construction Sites Michael Darms, Matthias Komar, Dirk Waldbauer, Stefan Lüke Lanes in Construction Sites Roadway is often bounded by elevated objects (e.g. guidance walls)
March 10, Greenbelt Road, Suite 400, Greenbelt, MD Tel: (301) Fax: (301)
 Fax: (301)") Detection of High Risk Intersections Using Synthetic Machine Vision John Alesse, john.alesse.ctr@dot.gov Brian O Donnell, brian.odonnell.ctr@dot.gov Stinger Ghaffarian Technologies, Inc. Cambridge, Massachusetts
Detection of High Risk Intersections Using Synthetic Machine Vision John Alesse, john.alesse.ctr@dot.gov Brian O Donnell, brian.odonnell.ctr@dot.gov Stinger Ghaffarian Technologies, Inc. Cambridge, Massachusetts
Analysis and Investigation Method for All Traffic Scenarios (AIMATS)
") Analysis and Investigation Method for All Traffic Scenarios (AIMATS) Dr. Christian Erbsmehl*, Dr. Nils Lubbe**, Niels Ferson**, Hitoshi Yuasa**, Dr. Tom Landgraf*, Martin Urban* *Fraunhofer Institute for
Analysis and Investigation Method for All Traffic Scenarios (AIMATS) Dr. Christian Erbsmehl*, Dr. Nils Lubbe**, Niels Ferson**, Hitoshi Yuasa**, Dr. Tom Landgraf*, Martin Urban* *Fraunhofer Institute for
A flexible application framework for distributed real time systems with applications in PC based driving simulators
 A flexible application framework for distributed real time systems with applications in PC based driving simulators M. Grein, A. Kaussner, H.-P. Krüger, H. Noltemeier Abstract For the research at the IZVW
A flexible application framework for distributed real time systems with applications in PC based driving simulators M. Grein, A. Kaussner, H.-P. Krüger, H. Noltemeier Abstract For the research at the IZVW
Prototyping Unit for Modelbased Applications
 PUMA Software and hardware at the highest level Prototyping Unit for Modelbased Applications With PUMA, we offer a compact and universal Rapid-Control-Prototyping-Platform optionally with integrated power
PUMA Software and hardware at the highest level Prototyping Unit for Modelbased Applications With PUMA, we offer a compact and universal Rapid-Control-Prototyping-Platform optionally with integrated power
INNOVATION+ New Product Showcase
 INNOVATION+ New Product Showcase Our newest innovations in digital imaging technology. Customer driven solutions engineered to maximize throughput and yield. Get more details on performance capability
INNOVATION+ New Product Showcase Our newest innovations in digital imaging technology. Customer driven solutions engineered to maximize throughput and yield. Get more details on performance capability
MMW sensors for Industrial, safety, Traffic and security applications
 MMW sensors for Industrial, safety, Traffic and security applications Philip Avery Director, Navtech Radar Ltd. Overview Introduction to Navtech Radar and what we do. A brief explanation of how FMCW radars
MMW sensors for Industrial, safety, Traffic and security applications Philip Avery Director, Navtech Radar Ltd. Overview Introduction to Navtech Radar and what we do. A brief explanation of how FMCW radars
Invited talk IET-Renault Workshop Autonomous Vehicles: From theory to full scale applications Novotel Paris Les Halles, June 18 th 2015
 Risk assessment & Decision-making for safe Vehicle Navigation under Uncertainty Christian LAUGIER, First class Research Director at Inria http://emotion.inrialpes.fr/laugier Contributions from Mathias
Risk assessment & Decision-making for safe Vehicle Navigation under Uncertainty Christian LAUGIER, First class Research Director at Inria http://emotion.inrialpes.fr/laugier Contributions from Mathias
HiFi Radar Target. Kristian Karlsson (RISE)
") HiFi Radar Target Kristian Karlsson (RISE) Outline HiFi Radar Target: Overview Background & goals Radar introduction RCS measurements: Setups Uncertainty contributions (ground reflection) Back scattering
HiFi Radar Target Kristian Karlsson (RISE) Outline HiFi Radar Target: Overview Background & goals Radar introduction RCS measurements: Setups Uncertainty contributions (ground reflection) Back scattering
Partner Event. Current products Coming products Market outlook Sales process
 Partner Event Current products Coming products Market outlook Sales process Current Products 2 Sivers IMA Radar Products RS3400 Series Sensors/Front Ends RS3400C RS3400X RS3410X RS3400K RS3400W CO1000A
Partner Event Current products Coming products Market outlook Sales process Current Products 2 Sivers IMA Radar Products RS3400 Series Sensors/Front Ends RS3400C RS3400X RS3410X RS3400K RS3400W CO1000A
Neural Networks The New Moore s Law
 Neural Networks The New Moore s Law Chris Rowen, PhD, FIEEE CEO Cognite Ventures December 216 Outline Moore s Law Revisited: Efficiency Drives Productivity Embedded Neural Network Product Segments Efficiency
Neural Networks The New Moore s Law Chris Rowen, PhD, FIEEE CEO Cognite Ventures December 216 Outline Moore s Law Revisited: Efficiency Drives Productivity Embedded Neural Network Product Segments Efficiency
DENSO
 DENSO www.densocorp-na.com Collaborative Automated Driving Description of Project DENSO is one of the biggest tier one suppliers in the automotive industry, and one of its main goals is to provide solutions
DENSO www.densocorp-na.com Collaborative Automated Driving Description of Project DENSO is one of the biggest tier one suppliers in the automotive industry, and one of its main goals is to provide solutions
NCS TITAN. The most powerful GNSS Simulator available. NCS TITAN Datasheet. Scalability. Extendability. In co-operation with
 NCS TITAN The most powerful GNSS Simulator available Scalability Fidelity Reliability Usability Extendability Flexibility Upgradability Features Signal Capabilities Support of all global (GNSS) and regional
NCS TITAN The most powerful GNSS Simulator available Scalability Fidelity Reliability Usability Extendability Flexibility Upgradability Features Signal Capabilities Support of all global (GNSS) and regional
PAKI consulting. Mees Mobility Center
 PAKI consulting Mees Mobility Center 1 Introduction RAAK-MKB project Projectcharter Involvement industry Involvement education Projectresults of the 3 subprojects: Smart Parking Smart Vision Smart Workload
PAKI consulting Mees Mobility Center 1 Introduction RAAK-MKB project Projectcharter Involvement industry Involvement education Projectresults of the 3 subprojects: Smart Parking Smart Vision Smart Workload
Bridging Functional Safety Analysis and Software Architecture Assessment Safety scenarios in Architecture Trade-off Analysis Method (ATAM)
") Bridging Functional Safety Analysis and Software Architecture Assessment Safety scenarios in Architecture Trade-off Analysis Method (ATAM) Miroslaw Staron Software Engineering Computer Science and Engineering
Bridging Functional Safety Analysis and Software Architecture Assessment Safety scenarios in Architecture Trade-off Analysis Method (ATAM) Miroslaw Staron Software Engineering Computer Science and Engineering
Von der Idee bis zur Umsetzung in einer Entwicklungsumgebung State of the Art von Dr. Simon Ginsburg
 Von der Idee bis zur Umsetzung in einer Entwicklungsumgebung State of the Art von Dr. Simon Ginsburg 2013 The MathWorks, Inc. 1 Key Takeaways Model-Based Design drives innovation scales for enterprises
Von der Idee bis zur Umsetzung in einer Entwicklungsumgebung State of the Art von Dr. Simon Ginsburg 2013 The MathWorks, Inc. 1 Key Takeaways Model-Based Design drives innovation scales for enterprises
Space Research expeditions and open space work. Education & Research Teaching and laboratory facilities. Medical Assistance for people
 Space Research expeditions and open space work Education & Research Teaching and laboratory facilities. Medical Assistance for people Safety Life saving activity, guarding Military Use to execute missions
Space Research expeditions and open space work Education & Research Teaching and laboratory facilities. Medical Assistance for people Safety Life saving activity, guarding Military Use to execute missions
Z+F IMAGER 5016 / Laser Scanner
 Z+F IMAGER 5016 / Laser Scanner Reaching new levels The new Z+F IMAGER 5016 combines compact and lightweight design with state-of-the-art laser scanning technology - allowing the user to reach new levels.
Z+F IMAGER 5016 / Laser Scanner Reaching new levels The new Z+F IMAGER 5016 combines compact and lightweight design with state-of-the-art laser scanning technology - allowing the user to reach new levels.
LEARN REAL-TIME & EMBEDDED COMPUTING CONFERENCE. Albuquerque December 6, 2011 Phoenix December 8, Register for FREE
 LEARN REAL-TIME & EMBEDDED COMPUTING CONFERENCE Albuquerque December 6, 2011 Phoenix December 8, 2011 Register for FREE Today @ www.rtecc.com welcome to RTECC DIRECTLY CONNECTING YOU AND THE NEW ERA OF
LEARN REAL-TIME & EMBEDDED COMPUTING CONFERENCE Albuquerque December 6, 2011 Phoenix December 8, 2011 Register for FREE Today @ www.rtecc.com welcome to RTECC DIRECTLY CONNECTING YOU AND THE NEW ERA OF
MATLAB 및 Simulink 를이용한운전자지원시스템개발
 MATLAB 및 Simulink 를이용한운전자지원시스템개발 김종헌차장 Senior Application Engineer MathWorks Korea 2015 The MathWorks, Inc. 1 Example : Sensor Fusion with Monocular Vision & Radar Configuration Monocular Vision installed
MATLAB 및 Simulink 를이용한운전자지원시스템개발 김종헌차장 Senior Application Engineer MathWorks Korea 2015 The MathWorks, Inc. 1 Example : Sensor Fusion with Monocular Vision & Radar Configuration Monocular Vision installed
Virtual car models for handling and ride bridging off and on-line simulations
 Virtual car models for handling and ride bridging off and on-line simulations Dr.Harald Wilhelm, Simulation Fahrverhalten Audi AG Diego Minen, Technical Director VI-Grade Vehicle EPO Stuttgart 2009 1 VI-CarRealTime
Virtual car models for handling and ride bridging off and on-line simulations Dr.Harald Wilhelm, Simulation Fahrverhalten Audi AG Diego Minen, Technical Director VI-Grade Vehicle EPO Stuttgart 2009 1 VI-CarRealTime
MACE R What s New?
 MACE R2 2016 What s New? Copyright (c) 2017 Battlespace Simulations, Inc. All rights reserved. Printed in the United States. Battlespace Simulations, MACE and the MACE & BSI logos are trademarks of Battlespace
MACE R2 2016 What s New? Copyright (c) 2017 Battlespace Simulations, Inc. All rights reserved. Printed in the United States. Battlespace Simulations, MACE and the MACE & BSI logos are trademarks of Battlespace
Dr. Ayşegül Uçar. Department of Mechatronics Engineering University of Firat, Elazig, Turkey.
 Dr. Aysegul UCAR Dr. Ayşegül Uçar Department of Mechatronics Engineering University of Firat, Elazig, Turkey agulucar@firat.edu.tr https://abs.firat.edu.tr/agulucar 2 My Country-Turkey 3 My University
Dr. Aysegul UCAR Dr. Ayşegül Uçar Department of Mechatronics Engineering University of Firat, Elazig, Turkey agulucar@firat.edu.tr https://abs.firat.edu.tr/agulucar 2 My Country-Turkey 3 My University
CMOS Image Sensor Testing An Intetrated Approach
 CMOS Image Sensor Testing An Intetrated Approach CMOS image sensors and camera modules are complex integrated circuits with a variety of input and output types many inputs and outputs. Engineers working
CMOS Image Sensor Testing An Intetrated Approach CMOS image sensors and camera modules are complex integrated circuits with a variety of input and output types many inputs and outputs. Engineers working
Vehicle Hardware-In-the-Loop System for ADAS Virtual Testing
 11 Vehicle Hardware-In-the-Loop System for ADAS Virtual Testing Romain Rossi, Clément Galko, Hariharan Narasimman and Xavier Savatier Univ. Rouen, UNIROUEN, ESIGELEC, IRSEEM 76000 Rouen, France 11.1 Introduction
11 Vehicle Hardware-In-the-Loop System for ADAS Virtual Testing Romain Rossi, Clément Galko, Hariharan Narasimman and Xavier Savatier Univ. Rouen, UNIROUEN, ESIGELEC, IRSEEM 76000 Rouen, France 11.1 Introduction