Object Category Detection using Audio-visual Cues
|
|
|
- Mildred Watson
- 6 years ago
- Views:
Transcription
1 Object Category Detection using Audio-visual Cues Luo Jie 1,2, Barbara Caputo 1,2, Alon Zweig 3, Jörg-Hendrik Bach 4, and Jörn Anemüller 4 1 IDIAP Research Institute, Centre du Parc, 1920 Martigny, Switzerland 2 Swiss Federal Institute of Technology in Lausanne(EPFL), 1015 Lausanne, Switzerland 3 Hebrew university of Jerusalem, Jerusalem, Israel 4 Carl von Ossietzky University Oldenburg, Oldenburg, Germany {jluo,bcaputo}@idiap.ch zweiga@cs.huji.ac.il {joerg-hendrik.bach, joern.anemueller}@uni-oldenburg.de Abstract. Categorization is one of the fundamental building blocks of cognitive systems. Object categorization has traditionally been addressed in the vision domain, even though cognitive agents are intrinsically multimodal. Indeed, biological systems combine several modalities in order to achieve robust categorization. In this paper we propose a multimodal approach to object category detection, using audio and visual information. The auditory channel is modeled on biologically motivated spectral features via a discriminative classifier. The visual channel is modeled by a state of the art part based model. Multimodality is achieved using two fusion schemes, one high level and the other low level. Experiments on six different object categories, under increasingly difficult conditions, show strengths and weaknesses of the two approaches, and clearly underline the open challenges for multimodal category detection. Key words: Object Categorization, Multimodal Recognition, Audio-visual Fusion 1 Introduction The capability to categorize is a fundamental component of cognitive systems. It can be considered as the building block of the capability to think itself [1]. Its importance for artificial systems is widely recognized, as witnessed by a vast literature (see [2, 3] and references therein). Traditionally, categorization has been studied from an unimodal perspective (with some notable exceptions, see [4] and references therein). For instance, during the last five years the computer vision community has attacked the object categorization problem by (a) developing algorithms for detection of specific categories like cars, cows, pedestrian and many others [2, 3]; (b) collecting several benchmark databases and promoting benchmark evaluations for assessing progresses in the field. The emerging paradigm from these activities is the so-called part-based approach, where visual categories are modeled on the basis of local information. This information is then used to build a learning based algorithm for classification. Both probabilistic and discriminative approaches have been used so far with promising results. Still, an algorithm aiming to work on an autonomous system cannot ignore the intrinsic multimodal nature of categories, and the multi sensory capabilities of the system.
2 2 Luo Jie, Barbara Caputo, Alon Zweig, Jörg-Hendrik Bach, and Jörn Anemüller For instance, we do recognize people on the basis of their visual appearance and their voice. Linen can be easily recognized because of its distinctive textural visual and tactile properties; and so forth. Biological systems combine information from all the five senses, so to achieve robust perception (see [5] and references therein). In this paper we propose an audio-visual object category detection algorithm. We consider categories like vehicles (cars, airplanes), instruments (pianos, guitars) and animals (dogs, cows). We assume that the category has been localized, and we focus on how to integrate together effectively the two modalities. We represent visual information using a state of the art part based model (section 2, [3]). Audio information is represented by a discriminative classifier, trained on biologically motivated spectral features (section 3.1, [6]). Following results from psychophysics, we propose to combine the two modalities with a high level fusion scheme that extends previous work on integration of multiple visual cues (section 3.2, [7]). Our approach is compared with single modality classifiers, and with a low level integration approach. Experiments on six different object categories, with increasing level of difficulty, show the value of our approach and clearly underline the existing challenges in this domain (section 3.3). 2 Vision Based Category Detection In this section we present the chosen vision based category detection algorithm (section 2.1) and experiments showing its strengths and weaknesses (section 2.2). 2.1 Category Detection To learn object models, we use the method described in [3]. The method starts by extracting interest regions using the Kadir & Brady (KB) [8] feature detector. After their initial detection, selected regions are cropped from the image and scaled down to pixel patches, represented using the first 15 DCT (Discrete Cosine Transform) coefficients (not including the DC). To complete the representation, 3 additional dimensions are concatenated to each feature, corresponding to the x and y image coordinates of the patch, and its scale respectively. Therefore each image I is represented using an unordered set F(I) of 18 dimensional vectors. The algorithm learns a generative relational part-based object model, modeling appearance, location and scale. Each part in a specific image I i corresponds to a patch feature from F(I i ). It is assumed that the appearance of different parts is independent, but this is not the case with the parts scale and location. However, once the object instances are aligned with respect to location and scale, the assumption of part location and scale independence becomes reasonable. Thus a 3-dimensional hidden variable C = (C l, C s ), which fixes the location of the object and its scale, is used. The model s parameters are discriminatively optimized using an extended boosting process. For the full derivation of the model and further details, we refer the reader to [3]. 2.2 Experiments We used an extensive dataset of six categories (airplanes, cars, cows, dogs, guitars and pianos). They present different type of challenges: airplanes and cars contain relatively












.")














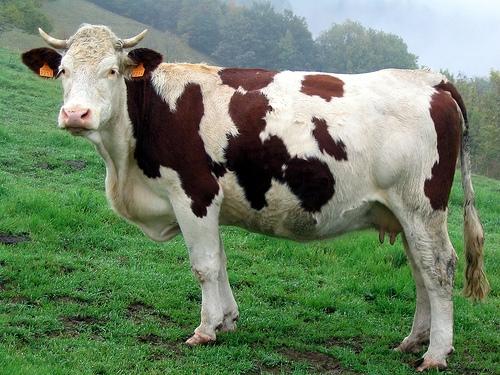






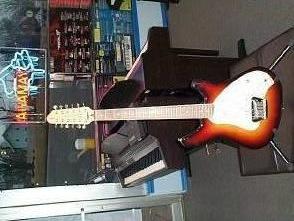
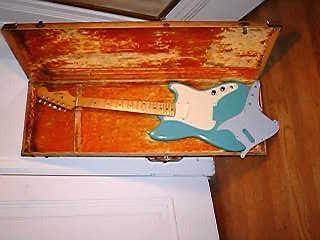










3 Object Category Detection using Audio-visual Cues Background Car Google Plane Objects 3 Site Piano Guitar Cow Dogs Road Objects Fig. 1. Sample images from the datasets. Object images appear on the left, background images on the right. small variations in scale and location, while cows and dogs have a more flexible appearance and variations in scale and locations. The category images and the background classes were collected from standard benchmark datasets (Caltech Datasets5 and PASCAL Challenge6 ). For each category we have several corresponding testing backgrounds, containing natural scenes or various distracting objects. Images from the six categories and the background groups are shown in Figure 1. Each category was trained and tested against different backgrounds. Each experiment was repeated several times, with randomly generated training and test sets. Table 1 presents the average results, for different categories and varying backgrounds. These numbers can be compared with those reported in [3], and show that the method delivers state of the art performance. We then run some experiments to challenge the algorithm. Namely, we reduced the training set to roughly 1/3 for some categories (airplanes, cars; results reported in Figure 2) and, for all categories, we collected new test images containing strong occlusions, unusual poses and high categorical variability. Exemplar challenging images are shown in Figure 2. We used the learnt models to classify these challenging images. These results are also reported in Figure 2. We see that, under these conditions, performance drops significantly for all categories. Indeed, these results seem to indicate that the part-based approach might suffer when different categories share similar visual part (dogs and cows sharing legs, cars and airplanes sharing wheels), or when the variability within a single category is very high, as it is for instance for grand pianos and upright pianos, or classic and electric guitars. It is worth stressing that these considerations are likely to apply to any part-based visual recognition method. Thus, our multimodal approach for overcoming these issues is of interest for a wide variety of algorithms. 5 6 Available at Available at


 Google 9.36 7.59 8.49 Objects 3.69 1.68 2.")







 Hard Dog Examples; (b) Hard Cow Examples; (c) Four-legged animals;")



. We then illustrate our integration method (section 3.")

4 4 Luo Jie, Barbara Caputo, Alon Zweig, Jörg-Hendrik Bach, and Jörn Anemüller Object Background FNR FPR ERR Background FNR FPR ERR Airplanes Google Road Cars Google Road Cows Site Road Dogs Site Road Guitars (Electrical) Google Objects Pianos (Grand) Google Objects Table 1. Performance of our visual category detection algorithm on six different objects on various background. False Negative Rate(FNR) =, False Positive Rate(FPR) num. o f f alse neg. = num. of false pos. num. o f neg. instances num. o f pos. instances and Error Rate(ERR) = num. o f f alse prediction total num. o f instances are reported separately. Object Background FNR FPR ERR Airplane Road Car Road Cow Site Dog Site Piano Google Guitar Google : reduced number of training samples; : learnt models of cows & dogs to detect new test images with occlusions and strange pose; : learnt models of grand pianos & electrical guitars to detect upright piano and classical guitar respectively. (a) Hard Dog Examples; (b) Hard Cow Examples; (c) Four-legged animals; (d) Upright Piano Fig. 2. Performance of the visual category detection algorithm on various difficulty examples. Some exemplary images are shown on the right of the table. 3 Audio-visual Category Detection This section presents our multi-modal approach to object category detection. We begin by illustrating the sound classification method used (section 3.1). We then illustrate our integration method (section 3.2) and show with an extensive experimental evaluation the effectiveness of our approach (section 3.3). 3.1 Audio Category Detection Real-world audio data is characterized in particular by two properties, spectral characteristics and modulation characteristics. Spectral characteristics are obtained by decomposing the signal into different spectral bands, typically using Bark-scaled frequency bands that approximate the spectral resolution of the human ear. Here, we use 17 Bark bands ranging from about 50 Hz to 3800 Hz. Within each spectral band, information
5 Object Category Detection using Audio-visual Cues 5 about the signal is encoded in changes of spectral energy across time, so-called amplitude modulations (2 Hz to 30 Hz). Grouping both properties in a single diagram, we obtain the amplitude modulation spectrogram (AMS, [9]), a 3-dimensional signal representation with dimensions time, (spectral) frequency and modulation frequency. Each 1s long temporal window is represented by = 493 points in frequency/modulationfrequency space. Audio category detection [6] is performed by linear SVM classification based on a subset of the 493 AMS input features, trained to discriminate between audio samples containing only background noise (e.g., street) and samples containing an audio category object (e.g., dog) embedded in background noise at different signalto-noise ratios (from +20 db to -20 db). 3.2 Audio-visual Category Detection This section provides a short description of our cue integration scheme. Many cue integration methods have been presented in the literature so far. For instance, one can divide them in low level and high level integration, where the emphasis is on the level at which integration happens [4]. In low level integration, information is combined before any use of classifiers or experts. In high level approaches, integration is accomplished by an ensemble of experts or classifiers; on each prediction, a classifier provides a hard decision, an expert provides an opinion. In this paper, we will investigate methods from both approaches. High Level Integration There are several methods for fusing multiple classifiers at the decision level [10], such as voting, sum-, product-rule, etc. However, voting could not be easily applied on our setup, since it requires an odd number of classifiers for a two class problem, and more for a multi-class problem. Here we use an extension of the discriminative accumulation scheme (DAS) [7]. The basic idea is to consider the margin outputs of any discriminative classifiers (e.g. AdaBoost and SVMs) as a measure of the confidence of the decision for each class, and accumulate all the outputs obtained for various cues with a linear function. The binary class version of the algorithm could be described into two steps: 1. Margin-based classifiers: These are a class of learning algorithms which take as input binary labeled training examples (x 1, y 1 ),..., (x m, y m ) with x i χ and y i { 1, +1}. Data are used to generate a real-valued function or hypothesis f : χ R, with f belonging to some hypothesis space F. The margin of an example x with respect to f is f (x), which is determined by minimizing: 1 mi=1 m L(y i f (x)), for some loss function: L : R [0, ] Different choices of the loss function L and different algorithms for minimizing the equation over some hypothesis space lead to various well studied learning algorithms such as Adaboost and SVMs. 2. Discriminative Accumulation: After all the margins are collected { f p j }P p=1, for all the P cues, the data x is classified using their linear combination: P J = sgn w p f p j (x p). p=1
6 6 Luo Jie, Barbara Caputo, Alon Zweig, Jörg-Hendrik Bach, and Jörn Anemüller The original DAS method considered only SVM as experts, used multiple visual cues for training and determined the weighting coefficients via cross validation. Here we generalize the approach in many respects: we take two different large margin classifiers (SVM and AdaBoost) as experts, we train each expert on a different modality, and we determine the weights {w p } P p=1 by training a single-layer artificial neural network (ANN) on a validation set. A drawback of the original DAS algorithm is that the accumulation function is linear, thus the method is not able to adapt to the special characteristics of the model. For example, one sensor might be suddenly affected by noise, or detect a novel input. Here we will assume that if one sensor is very confident about the presence of a category (i.e. margin above a certain threshold), it is highly probable that this sensor is correct. We thus introduce a threshold before the accumulation, so that if the margin output value of one classifier is larger than the threshold, we will take it directly as the decision. Low Level Integration The low level fusion is also known as feature level fusion. Features extracted from data provided by different sensors are combined. In case of audio and visual feature vectors, the simple concatenation technique could be employed, where a new feature vector can be built by concatenating two feature vectors together. There are a few drawbacks to this approach: the dimensionality of the resulting feature vector is increased, and the two separate feature vectors must be available at the same time (synchronous acquisition). Due to the second problem, the high level integration is usually preferred in the literature for audio-visual fusion [4]. The visual feature vectors are built by concatenating all the P feature descriptors. Each feature consists of a 20-dimensional vector including [3]: the 18 dimensional vector representing each image (see section 2.1), plus a normalized mean of the feature and a normalized logarithm of the feature variance. The training set is then normalized to have unit variance in all dimensions, and the standard deviations are stored in order to allow for identical scaling of the test data. Finally, the visual feature vector is concatenated with audio feature vectors, and a linear SVM is trained for the detection. 3.3 Experiments Experimental Setup We evaluated our multi-modal approaches with three series of experiments. Our audio dataset contains a large number of audio clips, manually collected from the internet, corresponding to the six visual categories as well as some other objects. The audio background noise class contains recordings of road traffic and pedestrian zone noise. All audio models were trained with the same background noise but different object sounds, on several combinations of training and test sets, randomly generated. Then each audio file (object/background) was randomly associated with an image (object/background) without repetitions. Audio and visual data were collected separately, and their association was somehow arbitrary. Thus, we repeated the experiments at least 1,000 times, for each setup, so to prevent lucky cases. We compared our result on fusion with those obtained by single cues, reporting average results. For DAS, we experimented with the linear and non-linear (i.e. with an additional threshold for high-confidences input) approaches. However, we did not find significant differences between them. Thus we only report results obtained using the linear method.
7 High-level Low-level Object Background Object Category Detection using Audio-visual Cues 7 Audio Fusion FNR FPR ERR FNR FPR ERR FNR FPR ERR Airplane Road Cars Road Cows Site Dog Site Piano Google Guitar Google Airplane Road Cars Road Cows Site Dog Site Piano Google Guitar Google Table 2. Results of each separate audio and visual cues and detection performance of both the high- and low-level integration scheme on six different objects. Experiments with Clean Data Table 2 reports the FNR., FPR., and ERR. for different objects, using high- and low-level fusion schemes. For each object, we performed experiments using various backgrounds. For space reasons we report here only a representative subset. Results show clearly that, for all objects and both fusion schemes, recognition improves significantly when using multiple cues, as opposed to single modalities. Regarding the comparison between the two fusion approaches, it is important to stress that, due to the different classification algorithms, and the differences in statistics in the training data for the different classes, it is not straightforward how to compare the performance of the two fusion schemes. Still, the high-level scheme seems to obtain overall lower error rates, compared to the low-level approach. Experiments with Difficult/Noisy Data We tested the robustness of our system with respect to noisy cues or difficult sensory inputs. First, we showed the effects of including audio cues for improving the system performance when there are not enough training examples (see section 2.2); results are reported in Table 3. Then, we used the models trained on clean data and test them on various difficult images (see section 2.2). These results are also shown in Table 3. Finally, the systems were tested against noisy audio inputs. The performance of the audio classifier was deliberately decreased by adding varying amount of street noise on the test object audio (SNR [ 20db, 20db]), and including a varying amount of audio files generated by other objects 7 as part of the test background noise (from 25% to 1% of the total number of testing background samples). Average results on two selected examples, car (less training examples, road background) and dog (site background), are shown in Figure 3. With respect to the high-level and low-level fusion methods, we see that the low level approach seems to be more robust to noise (Table 3 and Figure 3). This might be 7 Sounds of other animals, e.g. bear, horse, in case of experiments on cows and dogs, and sounds of artificial objects, e.g. phone, helicopters, in case of vehicles and instruments.
8 8 Luo Jie, Barbara Caputo, Alon Zweig, Jörg-Hendrik Bach, and Jörn Anemüller High. Low. Object Background Audio Fusion FNR FPR ERR FNR FPR ERR FNR FPR ERR Airplane (Less) Road Cars (Less) Road Airplane (Less) Road Cars (Less) Road Table 3. Performance of the multimodal system suffering from less visual training examples. Object Background High-level Low-level Audio Fusion Audio Fusion Cows (Hard) Site Dog (Hard) Site Piano (Upright) Google Guitar(Classical) Google Table 4. Performance of the multimodal system in presence of difficult test examples with occlusions, unusual poses and high categorical variability. Since background images were not used during test, only the false negative error rates (FNR) are reported. due to the nature of the two algorithms, as for the low level fusion method the error rate is linked to the lower error rate between the two cues. The high-level fusion scheme instead weights the confidence estimates from the two sensory channels with coefficients learned during training. Thus, if one modality was weighted strongly during training, but is very noisy during test, the high-level scheme will suffer from that. Experiments with Missing Audio An important issue when working on multimodal information processing is the synchronicity of the two modalities, i.e. both audio and visual input must be perceived together by the system. However, unlike the multimodal person authentication scenario [4], in real-world cases the two inputs may not always be synchronized, e.g. a dog might be quiet. We tested our system in the case where some of the object samples were not accompanied by audio. To simplify the problem, we only considered the case where roughly 50% of the object samples are silent. We considered three different ways to tackle the problem (see Figure 4, caption), and we optimized our system using a validation set under the same setup. Figure 4 reports the average results on the categories car (road background) and dog (site background). We can see that the performance still improves significantly when the missing audio inputs were represented using zero values (roughly the same as results reported in Table 2). For the other two scenarios, the performance on cars still grows, while the performance on dogs drops because the system was biased toward the audio classifier when the visual classifier did not have high accuracy. However, the system was always better than using the visual algorithm alone.
9 Object Category Detection using Audio-visual Cues Audio Optimize Clean Audio Fusion Error Rate [%] 15 Error Rate [%] SNR!20 SNR!15 SNR!10 SNR!5 SNR0 SNR+5 SNR+10 SNR+15 SNR+20 Noise on Audio Data (a) Cars, High-level Fusion. 0 SNR!20 SNR!15 SNR!10 SNR!5 SNR0 SNR+5 SNR+10 SNR+15 SNR+20 Noise on Audio Data (b) Cars, Low-level Fusion Audio Optimize Clean SNR Audio Fusion Error Rate [%] Error Rate [%] SNR!20 SNR!15 SNR!10 SNR!5 SNR0 SNR+5 SNR+10 SNR+15 SNR+20 Noise on Audio Data (c) Dogs, High-level Fusion. 0 SNR!20 SNR!15 SNR!10 SNR!5 SNR0 SNR+5 SNR+10 SNR+15 SNR+20 Noise on Audio Data (d) Dogs, Low-level Fusion. Fig. 3. Performance of the multimodal system in the presence of different level of corrupted audio inputs. For high-level fusion, the accumulating weights were found using different criteria: the weights were determined using clean audio and visual data through previous experiments (Clean), determined using data at current test noisy level (Optimize), or determined using data at fixed noisy level (e.g. SNR+10). 4 Discussion and Conclusions This paper presented a multimodal approach to object category detection. We considered audio and visual cues, and we proposed two alternative fusion schemes, one highlevel and the other low-level. We showed with extensive experiments that using multiple modalities for categorization leads to higher performance and robustness, compared to uni-modal approaches. This work can be developed in many ways. Our experiments show that the highlevel approach might suffer in case of noisy data. This could be addressed by using adaptive weights, related to the confidence of the prediction for each modality. Also, we estimate confidences using the distance from the separating hyperplane, but other solutions should be explored. We also plan to extend our model to a hierarchical representation as in [11]. Finally, these experiments should be repeated on original audio-visual
10 10 Luo Jie, Barbara Caputo, Alon Zweig, Jörg-Hendrik Bach, and Jörn Anemüller Error Rate [%] Audio Zero Random Background Car Object Dog Three ways for representing the missing audio input: Zero: the input confidences of the audio classifier equal zero, if the audio is missing; thus only the visual classifier will be considered. Random: the input confidences of the audio classifier equal randomly generated numbers with a zero mean and standard deviation equals one, if the audio is missing; Background: based on the assumption that the environmental noise was always presented, the test images were associated with a random background audio if the audio input is missing. Fig. 4. Performance of the multimodal system under asynchronous test conditions. data, so to better address the issues of synchronicity and sound-visual localization. Future work will focus on these issues. Acknowledgments This work was sponsored by the EU integrated project DIRAC (Detection and Identification of Rare Audio-visual Cues, IST The support is gratefully acknowledged. References 1. Pfeifer, R., Bongard, J.: How the body shapes the way we think. MIT Press (2006) 2. Fergus, R., Perona, P., Zisserman, A.: Weakly supervised scale-invariant learning of models for visual recognition. Int. J. Comput. Vision 71(3) (2007) Bar-Hillel, A., Weinshall, D.: Efficient learning of relational object class models. Int. J. Comput. Vision (2007) in press. 4. Sanderson, C., Paliwal, K.K.: Identity verification using speech and face information. Digital Signal Processing 14(5) (2004) Burr, D., Alais, D.: Combining visual and auditory information. Progress in Brain Research 155 (2006) Schmidt, D., Anemüller, J.: Acoustic feature selection for speech detection based on amplitude modulation spectrograms. In: 33rd German Annual Conference on Acoustics. (2007) 7. Nilsback, M.E., Caputo, B.: Cue integration through discriminative accumulation. In: IEEE Computer Society Conference on Computer Vision and Pattern Recognition. (2004) Kadir, T., Brady, M.: Saliency, scale and image description. Int. J. Comput. Vision 45(2) (2001) Kollmeier, B., Koch, R.: Speech enhancement based on physiological and psychoacoustical models of modulation perception and binaural interaction. J. Acoust. Soc. Am. 95(3) (1994) Polikar, R.: Ensemble based systems in decision making. IEEE Circuits and Systems Mag. 6(3) (2006) Zweig, A., Weinshall, D.: Exploiting object hierarchy: Combining models from different category levels. In: IEEE 11th International Conference on Computer Vision. (2007) 1 8
FACE RECOGNITION USING NEURAL NETWORKS
 Int. J. Elec&Electr.Eng&Telecoms. 2014 Vinoda Yaragatti and Bhaskar B, 2014 Research Paper ISSN 2319 2518 www.ijeetc.com Vol. 3, No. 3, July 2014 2014 IJEETC. All Rights Reserved FACE RECOGNITION USING
Int. J. Elec&Electr.Eng&Telecoms. 2014 Vinoda Yaragatti and Bhaskar B, 2014 Research Paper ISSN 2319 2518 www.ijeetc.com Vol. 3, No. 3, July 2014 2014 IJEETC. All Rights Reserved FACE RECOGNITION USING
Today. CS 395T Visual Recognition. Course content. Administration. Expectations. Paper reviews
 Today CS 395T Visual Recognition Course logistics Overview Volunteers, prep for next week Thursday, January 18 Administration Class: Tues / Thurs 12:30-2 PM Instructor: Kristen Grauman grauman at cs.utexas.edu
Today CS 395T Visual Recognition Course logistics Overview Volunteers, prep for next week Thursday, January 18 Administration Class: Tues / Thurs 12:30-2 PM Instructor: Kristen Grauman grauman at cs.utexas.edu
Different Approaches of Spectral Subtraction Method for Speech Enhancement
 ISSN 2249 5460 Available online at www.internationalejournals.com International ejournals International Journal of Mathematical Sciences, Technology and Humanities 95 (2013 1056 1062 Different Approaches
ISSN 2249 5460 Available online at www.internationalejournals.com International ejournals International Journal of Mathematical Sciences, Technology and Humanities 95 (2013 1056 1062 Different Approaches
Speech/Music Change Point Detection using Sonogram and AANN
 International Journal of Information & Computation Technology. ISSN 0974-2239 Volume 6, Number 1 (2016), pp. 45-49 International Research Publications House http://www. irphouse.com Speech/Music Change
International Journal of Information & Computation Technology. ISSN 0974-2239 Volume 6, Number 1 (2016), pp. 45-49 International Research Publications House http://www. irphouse.com Speech/Music Change
The psychoacoustics of reverberation
 The psychoacoustics of reverberation Steven van de Par Steven.van.de.Par@uni-oldenburg.de July 19, 2016 Thanks to Julian Grosse and Andreas Häußler 2016 AES International Conference on Sound Field Control
The psychoacoustics of reverberation Steven van de Par Steven.van.de.Par@uni-oldenburg.de July 19, 2016 Thanks to Julian Grosse and Andreas Häußler 2016 AES International Conference on Sound Field Control
Background Pixel Classification for Motion Detection in Video Image Sequences
 Background Pixel Classification for Motion Detection in Video Image Sequences P. Gil-Jiménez, S. Maldonado-Bascón, R. Gil-Pita, and H. Gómez-Moreno Dpto. de Teoría de la señal y Comunicaciones. Universidad
Background Pixel Classification for Motion Detection in Video Image Sequences P. Gil-Jiménez, S. Maldonado-Bascón, R. Gil-Pita, and H. Gómez-Moreno Dpto. de Teoría de la señal y Comunicaciones. Universidad
Applications of Music Processing
 Lecture Music Processing Applications of Music Processing Christian Dittmar International Audio Laboratories Erlangen christian.dittmar@audiolabs-erlangen.de Singing Voice Detection Important pre-requisite
Lecture Music Processing Applications of Music Processing Christian Dittmar International Audio Laboratories Erlangen christian.dittmar@audiolabs-erlangen.de Singing Voice Detection Important pre-requisite
Adaptive Filters Application of Linear Prediction
 Adaptive Filters Application of Linear Prediction Gerhard Schmidt Christian-Albrechts-Universität zu Kiel Faculty of Engineering Electrical Engineering and Information Technology Digital Signal Processing
Adaptive Filters Application of Linear Prediction Gerhard Schmidt Christian-Albrechts-Universität zu Kiel Faculty of Engineering Electrical Engineering and Information Technology Digital Signal Processing
Semantic Localization of Indoor Places. Lukas Kuster
 Semantic Localization of Indoor Places Lukas Kuster Motivation GPS for localization [7] 2 Motivation Indoor navigation [8] 3 Motivation Crowd sensing [9] 4 Motivation Targeted Advertisement [10] 5 Motivation
Semantic Localization of Indoor Places Lukas Kuster Motivation GPS for localization [7] 2 Motivation Indoor navigation [8] 3 Motivation Crowd sensing [9] 4 Motivation Targeted Advertisement [10] 5 Motivation
Using RASTA in task independent TANDEM feature extraction
 R E S E A R C H R E P O R T I D I A P Using RASTA in task independent TANDEM feature extraction Guillermo Aradilla a John Dines a Sunil Sivadas a b IDIAP RR 04-22 April 2004 D a l l e M o l l e I n s t
R E S E A R C H R E P O R T I D I A P Using RASTA in task independent TANDEM feature extraction Guillermo Aradilla a John Dines a Sunil Sivadas a b IDIAP RR 04-22 April 2004 D a l l e M o l l e I n s t
Campus Location Recognition using Audio Signals
 1 Campus Location Recognition using Audio Signals James Sun,Reid Westwood SUNetID:jsun2015,rwestwoo Email: jsun2015@stanford.edu, rwestwoo@stanford.edu I. INTRODUCTION People use sound both consciously
1 Campus Location Recognition using Audio Signals James Sun,Reid Westwood SUNetID:jsun2015,rwestwoo Email: jsun2015@stanford.edu, rwestwoo@stanford.edu I. INTRODUCTION People use sound both consciously
Image Extraction using Image Mining Technique
 IOSR Journal of Engineering (IOSRJEN) e-issn: 2250-3021, p-issn: 2278-8719 Vol. 3, Issue 9 (September. 2013), V2 PP 36-42 Image Extraction using Image Mining Technique Prof. Samir Kumar Bandyopadhyay,
IOSR Journal of Engineering (IOSRJEN) e-issn: 2250-3021, p-issn: 2278-8719 Vol. 3, Issue 9 (September. 2013), V2 PP 36-42 Image Extraction using Image Mining Technique Prof. Samir Kumar Bandyopadhyay,
Voice Activity Detection
 Voice Activity Detection Speech Processing Tom Bäckström Aalto University October 2015 Introduction Voice activity detection (VAD) (or speech activity detection, or speech detection) refers to a class
Voice Activity Detection Speech Processing Tom Bäckström Aalto University October 2015 Introduction Voice activity detection (VAD) (or speech activity detection, or speech detection) refers to a class
DERIVATION OF TRAPS IN AUDITORY DOMAIN
 DERIVATION OF TRAPS IN AUDITORY DOMAIN Petr Motlíček, Doctoral Degree Programme (4) Dept. of Computer Graphics and Multimedia, FIT, BUT E-mail: motlicek@fit.vutbr.cz Supervised by: Dr. Jan Černocký, Prof.
DERIVATION OF TRAPS IN AUDITORY DOMAIN Petr Motlíček, Doctoral Degree Programme (4) Dept. of Computer Graphics and Multimedia, FIT, BUT E-mail: motlicek@fit.vutbr.cz Supervised by: Dr. Jan Černocký, Prof.
Wheel Health Monitoring Using Onboard Sensors
 Wheel Health Monitoring Using Onboard Sensors Brad M. Hopkins, Ph.D. Project Engineer Condition Monitoring Amsted Rail Company, Inc. 1 Agenda 1. Motivation 2. Overview of Methodology 3. Application: Wheel
Wheel Health Monitoring Using Onboard Sensors Brad M. Hopkins, Ph.D. Project Engineer Condition Monitoring Amsted Rail Company, Inc. 1 Agenda 1. Motivation 2. Overview of Methodology 3. Application: Wheel
Figure 1. Artificial Neural Network structure. B. Spiking Neural Networks Spiking Neural networks (SNNs) fall into the third generation of neural netw
 fall into the third generation of neural netw") Review Analysis of Pattern Recognition by Neural Network Soni Chaturvedi A.A.Khurshid Meftah Boudjelal Electronics & Comm Engg Electronics & Comm Engg Dept. of Computer Science P.I.E.T, Nagpur RCOEM, Nagpur
Review Analysis of Pattern Recognition by Neural Network Soni Chaturvedi A.A.Khurshid Meftah Boudjelal Electronics & Comm Engg Electronics & Comm Engg Dept. of Computer Science P.I.E.T, Nagpur RCOEM, Nagpur
Neural Models for Multi-Sensor Integration in Robotics
 Department of Informatics Intelligent Robotics WS 2016/17 Neural Models for Multi-Sensor Integration in Robotics Josip Josifovski 4josifov@informatik.uni-hamburg.de Outline Multi-sensor Integration: Neurally
Department of Informatics Intelligent Robotics WS 2016/17 Neural Models for Multi-Sensor Integration in Robotics Josip Josifovski 4josifov@informatik.uni-hamburg.de Outline Multi-sensor Integration: Neurally
Mel Spectrum Analysis of Speech Recognition using Single Microphone
 International Journal of Engineering Research in Electronics and Communication Mel Spectrum Analysis of Speech Recognition using Single Microphone [1] Lakshmi S.A, [2] Cholavendan M [1] PG Scholar, Sree
International Journal of Engineering Research in Electronics and Communication Mel Spectrum Analysis of Speech Recognition using Single Microphone [1] Lakshmi S.A, [2] Cholavendan M [1] PG Scholar, Sree
Wavelet-based Image Splicing Forgery Detection
 Wavelet-based Image Splicing Forgery Detection 1 Tulsi Thakur M.Tech (CSE) Student, Department of Computer Technology, basiltulsi@gmail.com 2 Dr. Kavita Singh Head & Associate Professor, Department of
Wavelet-based Image Splicing Forgery Detection 1 Tulsi Thakur M.Tech (CSE) Student, Department of Computer Technology, basiltulsi@gmail.com 2 Dr. Kavita Singh Head & Associate Professor, Department of
Singing Voice Detection. Applications of Music Processing. Singing Voice Detection. Singing Voice Detection. Singing Voice Detection
 Detection Lecture usic Processing Applications of usic Processing Christian Dittmar International Audio Laboratories Erlangen christian.dittmar@audiolabs-erlangen.de Important pre-requisite for: usic segmentation
Detection Lecture usic Processing Applications of usic Processing Christian Dittmar International Audio Laboratories Erlangen christian.dittmar@audiolabs-erlangen.de Important pre-requisite for: usic segmentation
arxiv: v1 [cs.lg] 2 Jan 2018
![arxiv: v1 [cs.lg] 2 Jan 2018](/thumbs/89/98840529.jpg "arxiv: v1 [cs.lg] 2 Jan 2018") Deep Learning for Identifying Potential Conceptual Shifts for Co-creative Drawing arxiv:1801.00723v1 [cs.lg] 2 Jan 2018 Pegah Karimi pkarimi@uncc.edu Kazjon Grace The University of Sydney Sydney, NSW 2006
Deep Learning for Identifying Potential Conceptual Shifts for Co-creative Drawing arxiv:1801.00723v1 [cs.lg] 2 Jan 2018 Pegah Karimi pkarimi@uncc.edu Kazjon Grace The University of Sydney Sydney, NSW 2006
Liangliang Cao *, Jiebo Luo +, Thomas S. Huang *
 Annotating ti Photo Collections by Label Propagation Liangliang Cao *, Jiebo Luo +, Thomas S. Huang * + Kodak Research Laboratories *University of Illinois at Urbana-Champaign (UIUC) ACM Multimedia 2008
Annotating ti Photo Collections by Label Propagation Liangliang Cao *, Jiebo Luo +, Thomas S. Huang * + Kodak Research Laboratories *University of Illinois at Urbana-Champaign (UIUC) ACM Multimedia 2008
Automatic Text-Independent. Speaker. Recognition Approaches Using Binaural Inputs
 Automatic Text-Independent Speaker Recognition Approaches Using Binaural Inputs Karim Youssef, Sylvain Argentieri and Jean-Luc Zarader 1 Outline Automatic speaker recognition: introduction Designed systems
Automatic Text-Independent Speaker Recognition Approaches Using Binaural Inputs Karim Youssef, Sylvain Argentieri and Jean-Luc Zarader 1 Outline Automatic speaker recognition: introduction Designed systems
Environmental Sound Recognition using MP-based Features
 Environmental Sound Recognition using MP-based Features Selina Chu, Shri Narayanan *, and C.-C. Jay Kuo * Speech Analysis and Interpretation Lab Signal & Image Processing Institute Department of Computer
Environmental Sound Recognition using MP-based Features Selina Chu, Shri Narayanan *, and C.-C. Jay Kuo * Speech Analysis and Interpretation Lab Signal & Image Processing Institute Department of Computer
- Basics of informatics - Computer network - Software engineering - Intelligent media processing - Human interface. Professor. Professor.
 - Basics of informatics - Computer network - Software engineering - Intelligent media processing - Human interface Computer-Aided Engineering Research of power/signal integrity analysis and EMC design
- Basics of informatics - Computer network - Software engineering - Intelligent media processing - Human interface Computer-Aided Engineering Research of power/signal integrity analysis and EMC design
Audio Imputation Using the Non-negative Hidden Markov Model
 Audio Imputation Using the Non-negative Hidden Markov Model Jinyu Han 1,, Gautham J. Mysore 2, and Bryan Pardo 1 1 EECS Department, Northwestern University 2 Advanced Technology Labs, Adobe Systems Inc.
Audio Imputation Using the Non-negative Hidden Markov Model Jinyu Han 1,, Gautham J. Mysore 2, and Bryan Pardo 1 1 EECS Department, Northwestern University 2 Advanced Technology Labs, Adobe Systems Inc.
Proposers Day Workshop
 Proposers Day Workshop Monday, January 23, 2017 @srcjump, #JUMPpdw Cognitive Computing Vertical Research Center Mandy Pant Academic Research Director Intel Corporation Center Motivation Today s deep learning
Proposers Day Workshop Monday, January 23, 2017 @srcjump, #JUMPpdw Cognitive Computing Vertical Research Center Mandy Pant Academic Research Director Intel Corporation Center Motivation Today s deep learning
Advanced Techniques for Mobile Robotics Location-Based Activity Recognition
 Advanced Techniques for Mobile Robotics Location-Based Activity Recognition Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz Activity Recognition Based on L. Liao, D. J. Patterson, D. Fox,
Advanced Techniques for Mobile Robotics Location-Based Activity Recognition Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz Activity Recognition Based on L. Liao, D. J. Patterson, D. Fox,
Biometric Recognition: How Do I Know Who You Are?
 Biometric Recognition: How Do I Know Who You Are? Anil K. Jain Department of Computer Science and Engineering, 3115 Engineering Building, Michigan State University, East Lansing, MI 48824, USA jain@cse.msu.edu
Biometric Recognition: How Do I Know Who You Are? Anil K. Jain Department of Computer Science and Engineering, 3115 Engineering Building, Michigan State University, East Lansing, MI 48824, USA jain@cse.msu.edu
Nonuniform multi level crossing for signal reconstruction
 6 Nonuniform multi level crossing for signal reconstruction 6.1 Introduction In recent years, there has been considerable interest in level crossing algorithms for sampling continuous time signals. Driven
6 Nonuniform multi level crossing for signal reconstruction 6.1 Introduction In recent years, there has been considerable interest in level crossing algorithms for sampling continuous time signals. Driven
I D I A P. Hierarchical and Parallel Processing of Modulation Spectrum for ASR applications Fabio Valente a and Hynek Hermansky a
 R E S E A R C H R E P O R T I D I A P Hierarchical and Parallel Processing of Modulation Spectrum for ASR applications Fabio Valente a and Hynek Hermansky a IDIAP RR 07-45 January 2008 published in ICASSP
R E S E A R C H R E P O R T I D I A P Hierarchical and Parallel Processing of Modulation Spectrum for ASR applications Fabio Valente a and Hynek Hermansky a IDIAP RR 07-45 January 2008 published in ICASSP
Reduction of Musical Residual Noise Using Harmonic- Adapted-Median Filter
 Reduction of Musical Residual Noise Using Harmonic- Adapted-Median Filter Ching-Ta Lu, Kun-Fu Tseng 2, Chih-Tsung Chen 2 Department of Information Communication, Asia University, Taichung, Taiwan, ROC
Reduction of Musical Residual Noise Using Harmonic- Adapted-Median Filter Ching-Ta Lu, Kun-Fu Tseng 2, Chih-Tsung Chen 2 Department of Information Communication, Asia University, Taichung, Taiwan, ROC
Autocomplete Sketch Tool
 Autocomplete Sketch Tool Sam Seifert, Georgia Institute of Technology Advanced Computer Vision Spring 2016 I. ABSTRACT This work details an application that can be used for sketch auto-completion. Sketch
Autocomplete Sketch Tool Sam Seifert, Georgia Institute of Technology Advanced Computer Vision Spring 2016 I. ABSTRACT This work details an application that can be used for sketch auto-completion. Sketch
Real-Time Face Detection and Tracking for High Resolution Smart Camera System
 Digital Image Computing Techniques and Applications Real-Time Face Detection and Tracking for High Resolution Smart Camera System Y. M. Mustafah a,b, T. Shan a, A. W. Azman a,b, A. Bigdeli a, B. C. Lovell
Digital Image Computing Techniques and Applications Real-Time Face Detection and Tracking for High Resolution Smart Camera System Y. M. Mustafah a,b, T. Shan a, A. W. Azman a,b, A. Bigdeli a, B. C. Lovell
Pose Invariant Face Recognition
 Pose Invariant Face Recognition Fu Jie Huang Zhihua Zhou Hong-Jiang Zhang Tsuhan Chen Electrical and Computer Engineering Department Carnegie Mellon University jhuangfu@cmu.edu State Key Lab for Novel
Pose Invariant Face Recognition Fu Jie Huang Zhihua Zhou Hong-Jiang Zhang Tsuhan Chen Electrical and Computer Engineering Department Carnegie Mellon University jhuangfu@cmu.edu State Key Lab for Novel
Image Forgery Detection Using Svm Classifier
 Image Forgery Detection Using Svm Classifier Anita Sahani 1, K.Srilatha 2 M.E. Student [Embedded System], Dept. Of E.C.E., Sathyabama University, Chennai, India 1 Assistant Professor, Dept. Of E.C.E, Sathyabama
Image Forgery Detection Using Svm Classifier Anita Sahani 1, K.Srilatha 2 M.E. Student [Embedded System], Dept. Of E.C.E., Sathyabama University, Chennai, India 1 Assistant Professor, Dept. Of E.C.E, Sathyabama
Classification of ships using autocorrelation technique for feature extraction of the underwater acoustic noise
 Classification of ships using autocorrelation technique for feature extraction of the underwater acoustic noise Noha KORANY 1 Alexandria University, Egypt ABSTRACT The paper applies spectral analysis to
Classification of ships using autocorrelation technique for feature extraction of the underwater acoustic noise Noha KORANY 1 Alexandria University, Egypt ABSTRACT The paper applies spectral analysis to
On Feature Selection, Bias-Variance, and Bagging
 On Feature Selection, Bias-Variance, and Bagging Art Munson 1 Rich Caruana 2 1 Department of Computer Science Cornell University 2 Microsoft Corporation ECML-PKDD 2009 Munson; Caruana (Cornell; Microsoft)
On Feature Selection, Bias-Variance, and Bagging Art Munson 1 Rich Caruana 2 1 Department of Computer Science Cornell University 2 Microsoft Corporation ECML-PKDD 2009 Munson; Caruana (Cornell; Microsoft)
An Improved Voice Activity Detection Based on Deep Belief Networks
 e-issn 2455 1392 Volume 2 Issue 4, April 2016 pp. 676-683 Scientific Journal Impact Factor : 3.468 http://www.ijcter.com An Improved Voice Activity Detection Based on Deep Belief Networks Shabeeba T. K.
e-issn 2455 1392 Volume 2 Issue 4, April 2016 pp. 676-683 Scientific Journal Impact Factor : 3.468 http://www.ijcter.com An Improved Voice Activity Detection Based on Deep Belief Networks Shabeeba T. K.
Automatic Morse Code Recognition Under Low SNR
 2nd International Conference on Mechanical, Electronic, Control and Automation Engineering (MECAE 2018) Automatic Morse Code Recognition Under Low SNR Xianyu Wanga, Qi Zhaob, Cheng Mac, * and Jianping
2nd International Conference on Mechanical, Electronic, Control and Automation Engineering (MECAE 2018) Automatic Morse Code Recognition Under Low SNR Xianyu Wanga, Qi Zhaob, Cheng Mac, * and Jianping
INTRODUCTION TO DEEP LEARNING. Steve Tjoa June 2013
 INTRODUCTION TO DEEP LEARNING Steve Tjoa kiemyang@gmail.com June 2013 Acknowledgements http://ufldl.stanford.edu/wiki/index.php/ UFLDL_Tutorial http://youtu.be/ayzoubkuf3m http://youtu.be/zmnoatzigik 2
INTRODUCTION TO DEEP LEARNING Steve Tjoa kiemyang@gmail.com June 2013 Acknowledgements http://ufldl.stanford.edu/wiki/index.php/ UFLDL_Tutorial http://youtu.be/ayzoubkuf3m http://youtu.be/zmnoatzigik 2
Face Detection: A Literature Review
 Face Detection: A Literature Review Dr.Vipulsangram.K.Kadam 1, Deepali G. Ganakwar 2 Professor, Department of Electronics Engineering, P.E.S. College of Engineering, Nagsenvana Aurangabad, Maharashtra,
Face Detection: A Literature Review Dr.Vipulsangram.K.Kadam 1, Deepali G. Ganakwar 2 Professor, Department of Electronics Engineering, P.E.S. College of Engineering, Nagsenvana Aurangabad, Maharashtra,
Spectral estimation using higher-lag autocorrelation coefficients with applications to speech recognition
 Spectral estimation using higher-lag autocorrelation coefficients with applications to speech recognition Author Shannon, Ben, Paliwal, Kuldip Published 25 Conference Title The 8th International Symposium
Spectral estimation using higher-lag autocorrelation coefficients with applications to speech recognition Author Shannon, Ben, Paliwal, Kuldip Published 25 Conference Title The 8th International Symposium
An Un-awarely Collected Real World Face Database: The ISL-Door Face Database
 An Un-awarely Collected Real World Face Database: The ISL-Door Face Database Hazım Kemal Ekenel, Rainer Stiefelhagen Interactive Systems Labs (ISL), Universität Karlsruhe (TH), Am Fasanengarten 5, 76131
An Un-awarely Collected Real World Face Database: The ISL-Door Face Database Hazım Kemal Ekenel, Rainer Stiefelhagen Interactive Systems Labs (ISL), Universität Karlsruhe (TH), Am Fasanengarten 5, 76131
A multi-class method for detecting audio events in news broadcasts
 A multi-class method for detecting audio events in news broadcasts Sergios Petridis, Theodoros Giannakopoulos, and Stavros Perantonis Computational Intelligence Laboratory, Institute of Informatics and
A multi-class method for detecting audio events in news broadcasts Sergios Petridis, Theodoros Giannakopoulos, and Stavros Perantonis Computational Intelligence Laboratory, Institute of Informatics and
Multi-modal Human-computer Interaction
 Multi-modal Human-computer Interaction Attila Fazekas Attila.Fazekas@inf.unideb.hu SSIP 2008, 9 July 2008 Hungary and Debrecen Multi-modal Human-computer Interaction - 2 Debrecen Big Church Multi-modal
Multi-modal Human-computer Interaction Attila Fazekas Attila.Fazekas@inf.unideb.hu SSIP 2008, 9 July 2008 Hungary and Debrecen Multi-modal Human-computer Interaction - 2 Debrecen Big Church Multi-modal
A Spatial Mean and Median Filter For Noise Removal in Digital Images
 A Spatial Mean and Median Filter For Noise Removal in Digital Images N.Rajesh Kumar 1, J.Uday Kumar 2 Associate Professor, Dept. of ECE, Jaya Prakash Narayan College of Engineering, Mahabubnagar, Telangana,
A Spatial Mean and Median Filter For Noise Removal in Digital Images N.Rajesh Kumar 1, J.Uday Kumar 2 Associate Professor, Dept. of ECE, Jaya Prakash Narayan College of Engineering, Mahabubnagar, Telangana,
Auto-tagging The Facebook
 Auto-tagging The Facebook Jonathan Michelson and Jorge Ortiz Stanford University 2006 E-mail: JonMich@Stanford.edu, jorge.ortiz@stanford.com Introduction For those not familiar, The Facebook is an extremely
Auto-tagging The Facebook Jonathan Michelson and Jorge Ortiz Stanford University 2006 E-mail: JonMich@Stanford.edu, jorge.ortiz@stanford.com Introduction For those not familiar, The Facebook is an extremely
Multi-modal Human-Computer Interaction. Attila Fazekas.
 Multi-modal Human-Computer Interaction Attila Fazekas Attila.Fazekas@inf.unideb.hu Szeged, 12 July 2007 Hungary and Debrecen Multi-modal Human-Computer Interaction - 2 Debrecen Big Church Multi-modal Human-Computer
Multi-modal Human-Computer Interaction Attila Fazekas Attila.Fazekas@inf.unideb.hu Szeged, 12 July 2007 Hungary and Debrecen Multi-modal Human-Computer Interaction - 2 Debrecen Big Church Multi-modal Human-Computer
Distortion products and the perceived pitch of harmonic complex tones
 Distortion products and the perceived pitch of harmonic complex tones D. Pressnitzer and R.D. Patterson Centre for the Neural Basis of Hearing, Dept. of Physiology, Downing street, Cambridge CB2 3EG, U.K.
Distortion products and the perceived pitch of harmonic complex tones D. Pressnitzer and R.D. Patterson Centre for the Neural Basis of Hearing, Dept. of Physiology, Downing street, Cambridge CB2 3EG, U.K.
INTERNATIONAL JOURNAL OF PURE AND APPLIED RESEARCH IN ENGINEERING AND TECHNOLOGY
 INTERNATIONAL JOURNAL OF PURE AND APPLIED RESEARCH IN ENGINEERING AND TECHNOLOGY A PATH FOR HORIZING YOUR INNOVATIVE WORK SMILE DETECTION WITH IMPROVED MISDETECTION RATE AND REDUCED FALSE ALARM RATE VRUSHALI
INTERNATIONAL JOURNAL OF PURE AND APPLIED RESEARCH IN ENGINEERING AND TECHNOLOGY A PATH FOR HORIZING YOUR INNOVATIVE WORK SMILE DETECTION WITH IMPROVED MISDETECTION RATE AND REDUCED FALSE ALARM RATE VRUSHALI
MATLAB DIGITAL IMAGE/SIGNAL PROCESSING TITLES
 MATLAB DIGITAL IMAGE/SIGNAL PROCESSING TITLES -2018 S.NO PROJECT CODE 1 ITIMP01 2 ITIMP02 3 ITIMP03 4 ITIMP04 5 ITIMP05 6 ITIMP06 7 ITIMP07 8 ITIMP08 9 ITIMP09 `10 ITIMP10 11 ITIMP11 12 ITIMP12 13 ITIMP13
MATLAB DIGITAL IMAGE/SIGNAL PROCESSING TITLES -2018 S.NO PROJECT CODE 1 ITIMP01 2 ITIMP02 3 ITIMP03 4 ITIMP04 5 ITIMP05 6 ITIMP06 7 ITIMP07 8 ITIMP08 9 ITIMP09 `10 ITIMP10 11 ITIMP11 12 ITIMP12 13 ITIMP13
CLASSLESS ASSOCIATION USING NEURAL NETWORKS
 Workshop track - ICLR 1 CLASSLESS ASSOCIATION USING NEURAL NETWORKS Federico Raue 1,, Sebastian Palacio, Andreas Dengel 1,, Marcus Liwicki 1 1 University of Kaiserslautern, Germany German Research Center
Workshop track - ICLR 1 CLASSLESS ASSOCIATION USING NEURAL NETWORKS Federico Raue 1,, Sebastian Palacio, Andreas Dengel 1,, Marcus Liwicki 1 1 University of Kaiserslautern, Germany German Research Center
A TWO-PART PREDICTIVE CODER FOR MULTITASK SIGNAL COMPRESSION. Scott Deeann Chen and Pierre Moulin
 A TWO-PART PREDICTIVE CODER FOR MULTITASK SIGNAL COMPRESSION Scott Deeann Chen and Pierre Moulin University of Illinois at Urbana-Champaign Department of Electrical and Computer Engineering 5 North Mathews
A TWO-PART PREDICTIVE CODER FOR MULTITASK SIGNAL COMPRESSION Scott Deeann Chen and Pierre Moulin University of Illinois at Urbana-Champaign Department of Electrical and Computer Engineering 5 North Mathews
Measuring the complexity of sound
 PRAMANA c Indian Academy of Sciences Vol. 77, No. 5 journal of November 2011 physics pp. 811 816 Measuring the complexity of sound NANDINI CHATTERJEE SINGH National Brain Research Centre, NH-8, Nainwal
PRAMANA c Indian Academy of Sciences Vol. 77, No. 5 journal of November 2011 physics pp. 811 816 Measuring the complexity of sound NANDINI CHATTERJEE SINGH National Brain Research Centre, NH-8, Nainwal
Imaging with hyperspectral sensors: the right design for your application
 Imaging with hyperspectral sensors: the right design for your application Frederik Schönebeck Framos GmbH f.schoenebeck@framos.com June 29, 2017 Abstract In many vision applications the relevant information
Imaging with hyperspectral sensors: the right design for your application Frederik Schönebeck Framos GmbH f.schoenebeck@framos.com June 29, 2017 Abstract In many vision applications the relevant information
I D I A P. On Factorizing Spectral Dynamics for Robust Speech Recognition R E S E A R C H R E P O R T. Iain McCowan a Hemant Misra a,b
 R E S E A R C H R E P O R T I D I A P On Factorizing Spectral Dynamics for Robust Speech Recognition a Vivek Tyagi Hervé Bourlard a,b IDIAP RR 3-33 June 23 Iain McCowan a Hemant Misra a,b to appear in
R E S E A R C H R E P O R T I D I A P On Factorizing Spectral Dynamics for Robust Speech Recognition a Vivek Tyagi Hervé Bourlard a,b IDIAP RR 3-33 June 23 Iain McCowan a Hemant Misra a,b to appear in
Performance study of Text-independent Speaker identification system using MFCC & IMFCC for Telephone and Microphone Speeches
 Performance study of Text-independent Speaker identification system using & I for Telephone and Microphone Speeches Ruchi Chaudhary, National Technical Research Organization Abstract: A state-of-the-art
Performance study of Text-independent Speaker identification system using & I for Telephone and Microphone Speeches Ruchi Chaudhary, National Technical Research Organization Abstract: A state-of-the-art
Enhanced MLP Input-Output Mapping for Degraded Pattern Recognition
 Enhanced MLP Input-Output Mapping for Degraded Pattern Recognition Shigueo Nomura and José Ricardo Gonçalves Manzan Faculty of Electrical Engineering, Federal University of Uberlândia, Uberlândia, MG,
Enhanced MLP Input-Output Mapping for Degraded Pattern Recognition Shigueo Nomura and José Ricardo Gonçalves Manzan Faculty of Electrical Engineering, Federal University of Uberlândia, Uberlândia, MG,
AAU SUMMER SCHOOL PROGRAMMING SOCIAL ROBOTS FOR HUMAN INTERACTION LECTURE 10 MULTIMODAL HUMAN-ROBOT INTERACTION
 AAU SUMMER SCHOOL PROGRAMMING SOCIAL ROBOTS FOR HUMAN INTERACTION LECTURE 10 MULTIMODAL HUMAN-ROBOT INTERACTION COURSE OUTLINE 1. Introduction to Robot Operating System (ROS) 2. Introduction to isociobot
AAU SUMMER SCHOOL PROGRAMMING SOCIAL ROBOTS FOR HUMAN INTERACTION LECTURE 10 MULTIMODAL HUMAN-ROBOT INTERACTION COURSE OUTLINE 1. Introduction to Robot Operating System (ROS) 2. Introduction to isociobot
Learning to Unlearn and Relearn Speech Signal Processing using Neural Networks: current and future perspectives
 Learning to Unlearn and Relearn Speech Signal Processing using Neural Networks: current and future perspectives Mathew Magimai Doss Collaborators: Vinayak Abrol, Selen Hande Kabil, Hannah Muckenhirn, Dimitri
Learning to Unlearn and Relearn Speech Signal Processing using Neural Networks: current and future perspectives Mathew Magimai Doss Collaborators: Vinayak Abrol, Selen Hande Kabil, Hannah Muckenhirn, Dimitri
Communications Theory and Engineering
 Communications Theory and Engineering Master's Degree in Electronic Engineering Sapienza University of Rome A.A. 2018-2019 Speech and telephone speech Based on a voice production model Parametric representation
Communications Theory and Engineering Master's Degree in Electronic Engineering Sapienza University of Rome A.A. 2018-2019 Speech and telephone speech Based on a voice production model Parametric representation
An Adaptive Kernel-Growing Median Filter for High Noise Images. Jacob Laurel. Birmingham, AL, USA. Birmingham, AL, USA
 An Adaptive Kernel-Growing Median Filter for High Noise Images Jacob Laurel Department of Electrical and Computer Engineering, University of Alabama at Birmingham, Birmingham, AL, USA Electrical and Computer
An Adaptive Kernel-Growing Median Filter for High Noise Images Jacob Laurel Department of Electrical and Computer Engineering, University of Alabama at Birmingham, Birmingham, AL, USA Electrical and Computer
Live Hand Gesture Recognition using an Android Device
 Live Hand Gesture Recognition using an Android Device Mr. Yogesh B. Dongare Department of Computer Engineering. G.H.Raisoni College of Engineering and Management, Ahmednagar. Email- yogesh.dongare05@gmail.com
Live Hand Gesture Recognition using an Android Device Mr. Yogesh B. Dongare Department of Computer Engineering. G.H.Raisoni College of Engineering and Management, Ahmednagar. Email- yogesh.dongare05@gmail.com
Research Seminar. Stefano CARRINO fr.ch
 Research Seminar Stefano CARRINO stefano.carrino@hefr.ch http://aramis.project.eia- fr.ch 26.03.2010 - based interaction Characterization Recognition Typical approach Design challenges, advantages, drawbacks
Research Seminar Stefano CARRINO stefano.carrino@hefr.ch http://aramis.project.eia- fr.ch 26.03.2010 - based interaction Characterization Recognition Typical approach Design challenges, advantages, drawbacks
The Automatic Classification Problem. Perceptrons, SVMs, and Friends: Some Discriminative Models for Classification
 Perceptrons, SVMs, and Friends: Some Discriminative Models for Classification Parallel to AIMA 8., 8., 8.6.3, 8.9 The Automatic Classification Problem Assign object/event or sequence of objects/events
Perceptrons, SVMs, and Friends: Some Discriminative Models for Classification Parallel to AIMA 8., 8., 8.6.3, 8.9 The Automatic Classification Problem Assign object/event or sequence of objects/events
Target detection in side-scan sonar images: expert fusion reduces false alarms
 Target detection in side-scan sonar images: expert fusion reduces false alarms Nicola Neretti, Nathan Intrator and Quyen Huynh Abstract We integrate several key components of a pattern recognition system
Target detection in side-scan sonar images: expert fusion reduces false alarms Nicola Neretti, Nathan Intrator and Quyen Huynh Abstract We integrate several key components of a pattern recognition system
SOUND SOURCE RECOGNITION AND MODELING
 SOUND SOURCE RECOGNITION AND MODELING CASA seminar, summer 2000 Antti Eronen antti.eronen@tut.fi Contents: Basics of human sound source recognition Timbre Voice recognition Recognition of environmental
SOUND SOURCE RECOGNITION AND MODELING CASA seminar, summer 2000 Antti Eronen antti.eronen@tut.fi Contents: Basics of human sound source recognition Timbre Voice recognition Recognition of environmental
The Basic Kak Neural Network with Complex Inputs
 The Basic Kak Neural Network with Complex Inputs Pritam Rajagopal The Kak family of neural networks [3-6,2] is able to learn patterns quickly, and this speed of learning can be a decisive advantage over
The Basic Kak Neural Network with Complex Inputs Pritam Rajagopal The Kak family of neural networks [3-6,2] is able to learn patterns quickly, and this speed of learning can be a decisive advantage over
III. Publication III. c 2005 Toni Hirvonen.
 III Publication III Hirvonen, T., Segregation of Two Simultaneously Arriving Narrowband Noise Signals as a Function of Spatial and Frequency Separation, in Proceedings of th International Conference on
III Publication III Hirvonen, T., Segregation of Two Simultaneously Arriving Narrowband Noise Signals as a Function of Spatial and Frequency Separation, in Proceedings of th International Conference on
An Efficient Color Image Segmentation using Edge Detection and Thresholding Methods
 19 An Efficient Color Image Segmentation using Edge Detection and Thresholding Methods T.Arunachalam* Post Graduate Student, P.G. Dept. of Computer Science, Govt Arts College, Melur - 625 106 Email-Arunac682@gmail.com
19 An Efficient Color Image Segmentation using Edge Detection and Thresholding Methods T.Arunachalam* Post Graduate Student, P.G. Dept. of Computer Science, Govt Arts College, Melur - 625 106 Email-Arunac682@gmail.com
Classification in Image processing: A Survey
 Classification in Image processing: A Survey Rashmi R V, Sheela Sridhar Department of computer science and Engineering, B.N.M.I.T, Bangalore-560070 Department of computer science and Engineering, B.N.M.I.T,
Classification in Image processing: A Survey Rashmi R V, Sheela Sridhar Department of computer science and Engineering, B.N.M.I.T, Bangalore-560070 Department of computer science and Engineering, B.N.M.I.T,
Session 2: 10 Year Vision session (11:00-12:20) - Tuesday. Session 3: Poster Highlights A (14:00-15:00) - Tuesday 20 posters (3minutes per poster)
 - Tuesday. Session 3: Poster Highlights A (14:00-15:00) - Tuesday 20 posters (3minutes per poster)") Lessons from Collecting a Million Biometric Samples 109 Expression Robust 3D Face Recognition by Matching Multi-component Local Shape Descriptors on the Nasal and Adjoining Cheek Regions 177 Shared Representation
Lessons from Collecting a Million Biometric Samples 109 Expression Robust 3D Face Recognition by Matching Multi-component Local Shape Descriptors on the Nasal and Adjoining Cheek Regions 177 Shared Representation
Investigation of noise and vibration impact on aircraft crew, studied in an aircraft simulator
 The 33 rd International Congress and Exposition on Noise Control Engineering Investigation of noise and vibration impact on aircraft crew, studied in an aircraft simulator Volker Mellert, Ingo Baumann,
The 33 rd International Congress and Exposition on Noise Control Engineering Investigation of noise and vibration impact on aircraft crew, studied in an aircraft simulator Volker Mellert, Ingo Baumann,
SSB Debate: Model-based Inference vs. Machine Learning
 SSB Debate: Model-based nference vs. Machine Learning June 3, 2018 SSB 2018 June 3, 2018 1 / 20 Machine learning in the biological sciences SSB 2018 June 3, 2018 2 / 20 Machine learning in the biological
SSB Debate: Model-based nference vs. Machine Learning June 3, 2018 SSB 2018 June 3, 2018 1 / 20 Machine learning in the biological sciences SSB 2018 June 3, 2018 2 / 20 Machine learning in the biological
Machine recognition of speech trained on data from New Jersey Labs
 Machine recognition of speech trained on data from New Jersey Labs Frequency response (peak around 5 Hz) Impulse response (effective length around 200 ms) 41 RASTA filter 10 attenuation [db] 40 1 10 modulation
Machine recognition of speech trained on data from New Jersey Labs Frequency response (peak around 5 Hz) Impulse response (effective length around 200 ms) 41 RASTA filter 10 attenuation [db] 40 1 10 modulation
I D I A P. Mel-Cepstrum Modulation Spectrum (MCMS) Features for Robust ASR R E S E A R C H R E P O R T. Iain McCowan a Hemant Misra a,b
 Features for Robust ASR R E S E A R C H R E P O R T. Iain McCowan a Hemant Misra a,b") R E S E A R C H R E P O R T I D I A P Mel-Cepstrum Modulation Spectrum (MCMS) Features for Robust ASR a Vivek Tyagi Hervé Bourlard a,b IDIAP RR 3-47 September 23 Iain McCowan a Hemant Misra a,b to appear
R E S E A R C H R E P O R T I D I A P Mel-Cepstrum Modulation Spectrum (MCMS) Features for Robust ASR a Vivek Tyagi Hervé Bourlard a,b IDIAP RR 3-47 September 23 Iain McCowan a Hemant Misra a,b to appear
Texas Hold em Inference Bot Proposal. By: Brian Mihok & Michael Terry Date Due: Monday, April 11, 2005
 Texas Hold em Inference Bot Proposal By: Brian Mihok & Michael Terry Date Due: Monday, April 11, 2005 1 Introduction One of the key goals in Artificial Intelligence is to create cognitive systems that
Texas Hold em Inference Bot Proposal By: Brian Mihok & Michael Terry Date Due: Monday, April 11, 2005 1 Introduction One of the key goals in Artificial Intelligence is to create cognitive systems that
Speech Enhancement Based On Noise Reduction
 Speech Enhancement Based On Noise Reduction Kundan Kumar Singh Electrical Engineering Department University Of Rochester ksingh11@z.rochester.edu ABSTRACT This paper addresses the problem of signal distortion
Speech Enhancement Based On Noise Reduction Kundan Kumar Singh Electrical Engineering Department University Of Rochester ksingh11@z.rochester.edu ABSTRACT This paper addresses the problem of signal distortion
Distance Estimation and Localization of Sound Sources in Reverberant Conditions using Deep Neural Networks
 Distance Estimation and Localization of Sound Sources in Reverberant Conditions using Deep Neural Networks Mariam Yiwere 1 and Eun Joo Rhee 2 1 Department of Computer Engineering, Hanbat National University,
Distance Estimation and Localization of Sound Sources in Reverberant Conditions using Deep Neural Networks Mariam Yiwere 1 and Eun Joo Rhee 2 1 Department of Computer Engineering, Hanbat National University,
CHAPTER 1 INTRODUCTION
 1 CHAPTER 1 INTRODUCTION 1.1 BACKGROUND The increased use of non-linear loads and the occurrence of fault on the power system have resulted in deterioration in the quality of power supplied to the customers.
1 CHAPTER 1 INTRODUCTION 1.1 BACKGROUND The increased use of non-linear loads and the occurrence of fault on the power system have resulted in deterioration in the quality of power supplied to the customers.
A CLOSER LOOK AT THE REPRESENTATION OF INTERAURAL DIFFERENCES IN A BINAURAL MODEL
 9th INTERNATIONAL CONGRESS ON ACOUSTICS MADRID, -7 SEPTEMBER 7 A CLOSER LOOK AT THE REPRESENTATION OF INTERAURAL DIFFERENCES IN A BINAURAL MODEL PACS: PACS:. Pn Nicolas Le Goff ; Armin Kohlrausch ; Jeroen
9th INTERNATIONAL CONGRESS ON ACOUSTICS MADRID, -7 SEPTEMBER 7 A CLOSER LOOK AT THE REPRESENTATION OF INTERAURAL DIFFERENCES IN A BINAURAL MODEL PACS: PACS:. Pn Nicolas Le Goff ; Armin Kohlrausch ; Jeroen
Drum Transcription Based on Independent Subspace Analysis
 Report for EE 391 Special Studies and Reports for Electrical Engineering Drum Transcription Based on Independent Subspace Analysis Yinyi Guo Center for Computer Research in Music and Acoustics, Stanford,
Report for EE 391 Special Studies and Reports for Electrical Engineering Drum Transcription Based on Independent Subspace Analysis Yinyi Guo Center for Computer Research in Music and Acoustics, Stanford,
Long Range Acoustic Classification
 Approved for public release; distribution is unlimited. Long Range Acoustic Classification Authors: Ned B. Thammakhoune, Stephen W. Lang Sanders a Lockheed Martin Company P. O. Box 868 Nashua, New Hampshire
Approved for public release; distribution is unlimited. Long Range Acoustic Classification Authors: Ned B. Thammakhoune, Stephen W. Lang Sanders a Lockheed Martin Company P. O. Box 868 Nashua, New Hampshire
Signal Processing for Speech Applications - Part 2-1. Signal Processing For Speech Applications - Part 2
 Signal Processing for Speech Applications - Part 2-1 Signal Processing For Speech Applications - Part 2 May 14, 2013 Signal Processing for Speech Applications - Part 2-2 References Huang et al., Chapter
Signal Processing for Speech Applications - Part 2-1 Signal Processing For Speech Applications - Part 2 May 14, 2013 Signal Processing for Speech Applications - Part 2-2 References Huang et al., Chapter
A VIDEO CAMERA ROAD SIGN SYSTEM OF THE EARLY WARNING FROM COLLISION WITH THE WILD ANIMALS
 Vol. 12, Issue 1/2016, 42-46 DOI: 10.1515/cee-2016-0006 A VIDEO CAMERA ROAD SIGN SYSTEM OF THE EARLY WARNING FROM COLLISION WITH THE WILD ANIMALS Slavomir MATUSKA 1*, Robert HUDEC 2, Patrik KAMENCAY 3,
Vol. 12, Issue 1/2016, 42-46 DOI: 10.1515/cee-2016-0006 A VIDEO CAMERA ROAD SIGN SYSTEM OF THE EARLY WARNING FROM COLLISION WITH THE WILD ANIMALS Slavomir MATUSKA 1*, Robert HUDEC 2, Patrik KAMENCAY 3,
Multimedia Forensics
 Multimedia Forensics Using Mathematics and Machine Learning to Determine an Image's Source and Authenticity Matthew C. Stamm Multimedia & Information Security Lab (MISL) Department of Electrical and Computer
Multimedia Forensics Using Mathematics and Machine Learning to Determine an Image's Source and Authenticity Matthew C. Stamm Multimedia & Information Security Lab (MISL) Department of Electrical and Computer
Recent Advances in Acoustic Signal Extraction and Dereverberation
 Recent Advances in Acoustic Signal Extraction and Dereverberation Emanuël Habets Erlangen Colloquium 2016 Scenario Spatial Filtering Estimated Desired Signal Undesired sound components: Sensor noise Competing
Recent Advances in Acoustic Signal Extraction and Dereverberation Emanuël Habets Erlangen Colloquium 2016 Scenario Spatial Filtering Estimated Desired Signal Undesired sound components: Sensor noise Competing
Classifying the Brain's Motor Activity via Deep Learning
 Final Report Classifying the Brain's Motor Activity via Deep Learning Tania Morimoto & Sean Sketch Motivation Over 50 million Americans suffer from mobility or dexterity impairments. Over the past few
Final Report Classifying the Brain's Motor Activity via Deep Learning Tania Morimoto & Sean Sketch Motivation Over 50 million Americans suffer from mobility or dexterity impairments. Over the past few
DESIGN AND IMPLEMENTATION OF AN ALGORITHM FOR MODULATION IDENTIFICATION OF ANALOG AND DIGITAL SIGNALS
 DESIGN AND IMPLEMENTATION OF AN ALGORITHM FOR MODULATION IDENTIFICATION OF ANALOG AND DIGITAL SIGNALS John Yong Jia Chen (Department of Electrical Engineering, San José State University, San José, California,
DESIGN AND IMPLEMENTATION OF AN ALGORITHM FOR MODULATION IDENTIFICATION OF ANALOG AND DIGITAL SIGNALS John Yong Jia Chen (Department of Electrical Engineering, San José State University, San José, California,
ARGUING THE SAFETY OF MACHINE LEARNING FOR HIGHLY AUTOMATED DRIVING USING ASSURANCE CASES LYDIA GAUERHOF BOSCH CORPORATE RESEARCH
 ARGUING THE SAFETY OF MACHINE LEARNING FOR HIGHLY AUTOMATED DRIVING USING ASSURANCE CASES 14.12.2017 LYDIA GAUERHOF BOSCH CORPORATE RESEARCH Arguing Safety of Machine Learning for Highly Automated Driving
ARGUING THE SAFETY OF MACHINE LEARNING FOR HIGHLY AUTOMATED DRIVING USING ASSURANCE CASES 14.12.2017 LYDIA GAUERHOF BOSCH CORPORATE RESEARCH Arguing Safety of Machine Learning for Highly Automated Driving
Evaluation of Image Segmentation Based on Histograms
 Evaluation of Image Segmentation Based on Histograms Andrej FOGELTON Slovak University of Technology in Bratislava Faculty of Informatics and Information Technologies Ilkovičova 3, 842 16 Bratislava, Slovakia
Evaluation of Image Segmentation Based on Histograms Andrej FOGELTON Slovak University of Technology in Bratislava Faculty of Informatics and Information Technologies Ilkovičova 3, 842 16 Bratislava, Slovakia
An Efficient Approach to Face Recognition Using a Modified Center-Symmetric Local Binary Pattern (MCS-LBP)
") , pp.13-22 http://dx.doi.org/10.14257/ijmue.2015.10.8.02 An Efficient Approach to Face Recognition Using a Modified Center-Symmetric Local Binary Pattern (MCS-LBP) Anusha Alapati 1 and Dae-Seong Kang 1
, pp.13-22 http://dx.doi.org/10.14257/ijmue.2015.10.8.02 An Efficient Approach to Face Recognition Using a Modified Center-Symmetric Local Binary Pattern (MCS-LBP) Anusha Alapati 1 and Dae-Seong Kang 1
COLOR IMAGE SEGMENTATION USING K-MEANS CLASSIFICATION ON RGB HISTOGRAM SADIA BASAR, AWAIS ADNAN, NAILA HABIB KHAN, SHAHAB HAIDER
 COLOR IMAGE SEGMENTATION USING K-MEANS CLASSIFICATION ON RGB HISTOGRAM SADIA BASAR, AWAIS ADNAN, NAILA HABIB KHAN, SHAHAB HAIDER Department of Computer Science, Institute of Management Sciences, 1-A, Sector
COLOR IMAGE SEGMENTATION USING K-MEANS CLASSIFICATION ON RGB HISTOGRAM SADIA BASAR, AWAIS ADNAN, NAILA HABIB KHAN, SHAHAB HAIDER Department of Computer Science, Institute of Management Sciences, 1-A, Sector
Biometric: EEG brainwaves
 Biometric: EEG brainwaves Jeovane Honório Alves 1 1 Department of Computer Science Federal University of Parana Curitiba December 5, 2016 Jeovane Honório Alves (UFPR) Biometric: EEG brainwaves Curitiba
Biometric: EEG brainwaves Jeovane Honório Alves 1 1 Department of Computer Science Federal University of Parana Curitiba December 5, 2016 Jeovane Honório Alves (UFPR) Biometric: EEG brainwaves Curitiba
Voice Activity Detection for Speech Enhancement Applications
 Voice Activity Detection for Speech Enhancement Applications E. Verteletskaya, K. Sakhnov Abstract This paper describes a study of noise-robust voice activity detection (VAD) utilizing the periodicity
Voice Activity Detection for Speech Enhancement Applications E. Verteletskaya, K. Sakhnov Abstract This paper describes a study of noise-robust voice activity detection (VAD) utilizing the periodicity
Online Large Margin Semi-supervised Algorithm for Automatic Classification of Digital Modulations
 Online Large Margin Semi-supervised Algorithm for Automatic Classification of Digital Modulations Hamidreza Hosseinzadeh*, Farbod Razzazi**, and Afrooz Haghbin*** Department of Electrical and Computer
Online Large Margin Semi-supervised Algorithm for Automatic Classification of Digital Modulations Hamidreza Hosseinzadeh*, Farbod Razzazi**, and Afrooz Haghbin*** Department of Electrical and Computer
KONKANI SPEECH RECOGNITION USING HILBERT-HUANG TRANSFORM
 KONKANI SPEECH RECOGNITION USING HILBERT-HUANG TRANSFORM Shruthi S Prabhu 1, Nayana C G 2, Ashwini B N 3, Dr. Parameshachari B D 4 Assistant Professor, Department of Telecommunication Engineering, GSSSIETW,
KONKANI SPEECH RECOGNITION USING HILBERT-HUANG TRANSFORM Shruthi S Prabhu 1, Nayana C G 2, Ashwini B N 3, Dr. Parameshachari B D 4 Assistant Professor, Department of Telecommunication Engineering, GSSSIETW,
Adaptive Filters Linear Prediction
 Adaptive Filters Gerhard Schmidt Christian-Albrechts-Universität zu Kiel Faculty of Engineering Institute of Electrical and Information Engineering Digital Signal Processing and System Theory Slide 1 Contents
Adaptive Filters Gerhard Schmidt Christian-Albrechts-Universität zu Kiel Faculty of Engineering Institute of Electrical and Information Engineering Digital Signal Processing and System Theory Slide 1 Contents
APPENDIX 1 TEXTURE IMAGE DATABASES
 167 APPENDIX 1 TEXTURE IMAGE DATABASES A 1.1 BRODATZ DATABASE The Brodatz's photo album is a well-known benchmark database for evaluating texture recognition algorithms. It contains 111 different texture
167 APPENDIX 1 TEXTURE IMAGE DATABASES A 1.1 BRODATZ DATABASE The Brodatz's photo album is a well-known benchmark database for evaluating texture recognition algorithms. It contains 111 different texture