Electrical and Computer Engineering Dept. Emerging Applications of VR
|
|
|
- Robyn Robertson
- 6 years ago
- Views:
Transcription


1 Electrical and Computer Engineering Dept. Emerging Applications of VR
2 Emerging applications of VR In manufacturing (especially virtual prototyping, assembly verification, ergonomics, and marketing); In robotics (programming, teleoperation, space robotics); In data visualization (volume visualization, oil and gas exploration, volumetric displays); Other areas.

3 VR penetration in non-medical fields % - companies using, Experimenting or Considering VR (UK VR Forum survey, 2000)
")
4 Classes of VR applications (UK VR Forum survey, 2000)

5 Main benefits of using VR (UK VR Forum survey, 2000)
6 VR in Manufacturing

7 GHOST Free Form Application Free Form sculpting is a new type of Human- Computer interaction; It functions as a convenient GUI that sits on top of the GHOST library; The GUI is based on static and dynamic bar menus dynabars ; It allows model export to CAM machines for rapid prototyping, as well as to animation packages for computer character animation. Requires dual Pentium II (> 300 MHz), 512 MB RAM, high-end hardware graphics acceleration, 1024x768 screen resolution (or better). Free Form Sculpting GHOST SDK PHANToM Drivers
8 FreeForm Initial screen Menu bar Tool bar Work area border Status bar Dynabar The center block is digital clay

9 FreeForm wire-cut mode Wire Cut Menu Sketch planes
10 Drawing on the cut plane Clay after Inside wire cut Clay after Outside wire cut Cut Inside button Cut Outside button Free Form wire cut




11 Carving a hole Carving a corner Smoothing while carving Getting carried away. FreeForm carving tools

12 Example Making of Saint Fruition Artist s s sketch Rough initial clay model

 Wire cut")
 Finished")
13 Example Making of Saint Fruition Finished body (clay) Wire cut arrow for support (clay) Finished support (clay)


14 Example Making of Saint Fruition Digital clay statue 5 ft Aluminum statue

 Key frame")
")
15 Example Making of Saint Fruition Statue model used for animation (Maya) Key frame animation of statue Textured statue used for animation (Maya)


16 Assembly verification Another stage in product development when the prototype is made of several parts; University of Washington developed the Virtual Assembly Design Environment to verify CAD design assemblies; Parts geometry and attributes are imported from CAD into VADE then the assembly is analyzed and robots are programmed Design modification in VR Collision detection through swept volumes


17 Assembly verification Car body tollerances Parts making up car exterior have varying tolerances. Tighter tolerances are more esthetically pleasing but also cost more. What is good enough? Inspection is done in inspection rooms using stripped lights. Same can be done on a virtual car aheda of real production Real inspection room Virtual Inspection room

18 Assembly verification Researchers in UK developed the Visualization of the Impact of Tolerance Allocation (VITAL) and tested it on a prototype Rover R75; They constructed several models with various tolerances; by shining the virtual car body with stripped light looking at discontinuities; Unacceptable tolerances discovered in the virtual inspection room

19 Ergonomic Analysis Jack is a an intelligent agent homanoid used in ergonomic analysis; the Task Analysis Toolkit computes lower-back effort and energy consumption relates to worker fatigue
; One such product is VirtualANTHROPOS developed in Germany to test the ease of use of tractor")
20 Ergonomic Analysis - continued Once a prototype is done, it has to be tested for ease of use (ergonomic analysis); One such product is VirtualANTHROPOS developed in Germany to test the ease of use of tractor cabins

21 Ergonomic Analysis An avatar controlled by the user is interacting with the virtual cabin while the system computes joint discomfort levels using ERGONAUT (an ergonomic analysis tool)

22 Ergonomic Analysis Another use of VirtualANTHROPOS is to visualize reach envelopes; The user can drive the avatar in real time using a wireless body suit;
 and a tool/part manipulation component and they are")
23 Personnel Training Training in airplane maintenance task has a cognitive component (manuals) and a tool/part manipulation component and they are sequential.
24 Personnel Training Task-related information is placed directly in the scene using augmented reality. Results in faster information retrieval and enhanced associative memory. System uses vision-based tracking to recognize worker s view and places text in relation to objects;

25 Personnel Training Training system detect removal of cover and labels parts underneath; then it detects the cap was removed and changes dynamically the text to 4. Press to test. If the test fails then additional areas of interest are highlighted ( Filter Bypass )


26 VR Marketing Applications Citröen uses virtual showrooms

27 VR Marketing Applications

28 VR Marketing Applications
29 Robotics Applications VR applications in Robotics/manufacturing relate to several areas: CAD design and robot programming, making the process more intuitive; Teleoperation (control at a distance) alleviating problems related to poor visibility and large time delays; Multiplexed teleoperation, acting as a filter of particular robot kinematics; Robots are also used in VR in haptic interfaces (discussed earlier in our course).
30 Robot programming The multi-modal teaching advisor helps novice operators program welding paths for industrial robots; It runs on a PC networked with trackers and laser range finder; Calculates the difference between the pre-computed (optimal) path and user s input on the teach pendant. This is presented graphically on the user s HMD (Burdea, 1999)

31 Robotic programming - continued Research done in Germany for offline robot programming done in VR, with the programmer immersed in the task he is programming; The programmer specifies the trajectories, and the simulation performs optimized collision detection; Validation is done at run time when the real robot is controlled using the same computer and real sensor data is used to fine-tune the VR-generated program. (Burdea, 1999)

32 VR Robotics Applications - continued Research at University of Tokyo for the teleoperation of robots in smoke-filled remote environments. Over-imposes the visual scene from the remote robot with the virtual scene of a kinematically identical robot. Thus VR acts as a guide to allow teleoperation. Operator VR GUI Degraded video feedback (Burdea, 1999)


33 Teleoperation with large time delays Research at NASA developed a VR-based teleoperation to allow operation despite large time delays. Works by controlling a phantom robot which responds instantaneously to the operator. Allows preview of the move, before it is executed.

34 Teleoperation with large time delays - continued Research at NASA drove the Mars rover using VR-based teleprogramming; This was used to send high-level macro commands based on the simulation of a virtual rover on a virtual Mars surface. This overcame a 20 minute time delay!


35 Supervisory control Researchers in Germany developed a way to naturally controlling robots through avatars; The users is immersed in VR and sees a scene with avatars to which he is mapped; He interacts through gestures (measured by a sensing glove)


36 Supervisory control A real robot then interacts with the remote real environment; If the task is visual inspection then real images from the remote site can be overlaid on the virtual scene, and thus seen by the user; Real remote robot Virtual robot with viewfinder

37 VR Robotic Teleoperation Research at Jet Propulsion Lab (California) allows the teleoperation of a remote robot indirectly by controlling a motionguide trajectory, which the robot is then constrained to follow. Motion guide Remote robot arm Task line Text mode task editor (Burdea, 1999)
 teleoperation of kinematically dissimilar robotic arms; VR")

38 VR Robotics Applications - continued Research at University of Paris to allow multiplexed (one-tomany) teleoperation of kinematically dissimilar robotic arms; VR acts as a high-level filter masking the detailed slave robot configuration; Translator then converts user actions to robot actions. Operator task-level GUI Remote robot arms (Burdea, 1999)
39 Supervisory control - continued
40 INFORMATION VISUALIZATION Represents the transformation of abstract data into 3D scenes; The information visualization pipeline allows the user to control the view to the scene using an input device and select an area of interest; The data extraction loop is asynchronous, so as to maintain interactivity. It reads user input from a FIFO buffer; Time-varying data represent a complex case, as user time may not coincide with the time clock used in visualizing the time-dependent data.

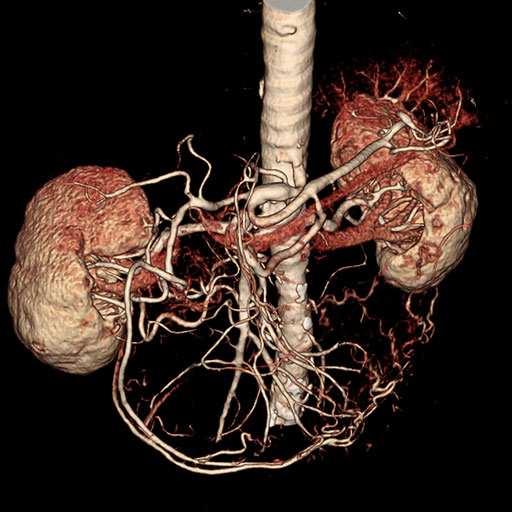
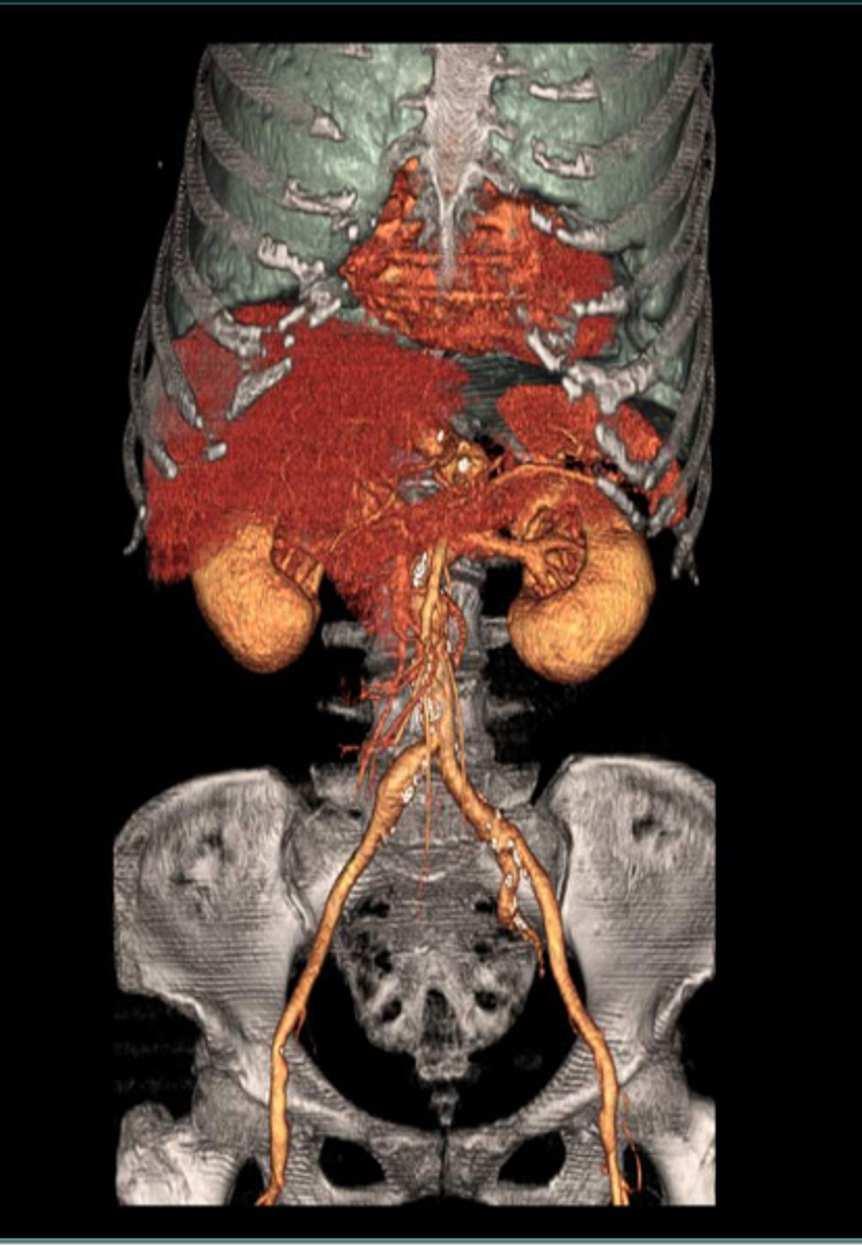
41 Oil and Gas Exploration and Well Management

42 Oil and Gas Exploration and Well Management
43 Volumetric graphics In this class we learned about surface-based (polygonal or spline) rendering only. This leaves the interior of virtual objects hollow; Volume graphics renders the surface as well as the interior of objects, called voxels. Surface rendered object Same object rendered volumetricly voxels

44 Ray casting to create a 2-D 2 D image from volumetric data View Plane Tri-linear interpolation Rays Calculate gradients and lighting
45 Volumetric graphics advantages Much richer dataset; Objects appear more real; Can be displayed on same displays as surface-based models Volumetric graphics disadvantages Much larger memory requirement (order of GB); Requires special boards to be real-time; Require special displays if auto-stereoscopy is desired; Much less used today small software support base.
46 Volumetric graphics

47 Volumetric Graphics Hardware Consist of volumetric rendering boards and of volumetric displays; VolumePro 1000 is a graphics accelerator sold by TeraRecon Inc. renders 512 x 512 x 512 voxels at 30 frames/second using a Mitsubishi chip. For surface geometry data it works together with the graphics board installed on the same PC

48 VolumePro Rendering Pipeline VolucePro 1000 processed the 3D data through ray casting from a view plane. Rays pick up color and opacity information by trilinear interpolation to the nearest lattice point Gradients are then computed
49 VOLUMETRIC DISPLAYS Early models used LED matrix panel that translates back-forth on rails; User can see stereo with bare eyes. Due to eye inertia, the image appears to float in space; But they had low resolution, noisy, monochrome (red LEDs); Did not have a 360º viewing area Object section LED
50 DMD-based volumetric display The display produces 200 disk-shaped slices each refreshed at 20 Hz; Resolution 768x768, 8 colors; 10 -diameter spherical image; 360º x 180º viewing angle. Translucent screen lamp Projection DMD engine Condenser lens Cold mirror motor fold mirror Rotating mirrors (Favarola et al., 2001)
51 Actual system assembly (Favarola et al., 2002)

52 Auto-stereoscopic 3-D Display produced by Actuality Systems (

53 New Interaction Techniques with Volumetric Displays (Balakrishnan et al, 2001)
Virtual Environments. Ruth Aylett
 Virtual Environments Ruth Aylett Aims of the course 1. To demonstrate a critical understanding of modern VE systems, evaluating the strengths and weaknesses of the current VR technologies 2. To be able
Virtual Environments Ruth Aylett Aims of the course 1. To demonstrate a critical understanding of modern VE systems, evaluating the strengths and weaknesses of the current VR technologies 2. To be able
What is Virtual Reality? Burdea,1993. Virtual Reality Triangle Triangle I 3 I 3. Virtual Reality in Product Development. Virtual Reality Technology
 Virtual Reality man made reality sense world What is Virtual Reality? Dipl-Ing Indra Kusumah Digital Product Design Fraunhofer IPT Steinbachstrasse 17 D-52074 Aachen Indrakusumah@iptfraunhoferde wwwiptfraunhoferde
Virtual Reality man made reality sense world What is Virtual Reality? Dipl-Ing Indra Kusumah Digital Product Design Fraunhofer IPT Steinbachstrasse 17 D-52074 Aachen Indrakusumah@iptfraunhoferde wwwiptfraunhoferde
Peter Berkelman. ACHI/DigitalWorld
 Magnetic Levitation Haptic Peter Berkelman ACHI/DigitalWorld February 25, 2013 Outline: Haptics - Force Feedback Sample devices: Phantoms, Novint Falcon, Force Dimension Inertia, friction, hysteresis/backlash
Magnetic Levitation Haptic Peter Berkelman ACHI/DigitalWorld February 25, 2013 Outline: Haptics - Force Feedback Sample devices: Phantoms, Novint Falcon, Force Dimension Inertia, friction, hysteresis/backlash
Force feedback interfaces & applications
 Force feedback interfaces & applications Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jukka Raisamo,
Force feedback interfaces & applications Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jukka Raisamo,
FORCE FEEDBACK. Roope Raisamo
 FORCE FEEDBACK Roope Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction Department of Computer Sciences University of Tampere, Finland Outline Force feedback interfaces
FORCE FEEDBACK Roope Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction Department of Computer Sciences University of Tampere, Finland Outline Force feedback interfaces
VIRTUAL REALITY Introduction. Emil M. Petriu SITE, University of Ottawa
 VIRTUAL REALITY Introduction Emil M. Petriu SITE, University of Ottawa Natural and Virtual Reality Virtual Reality Interactive Virtual Reality Virtualized Reality Augmented Reality HUMAN PERCEPTION OF
VIRTUAL REALITY Introduction Emil M. Petriu SITE, University of Ottawa Natural and Virtual Reality Virtual Reality Interactive Virtual Reality Virtualized Reality Augmented Reality HUMAN PERCEPTION OF
Building a bimanual gesture based 3D user interface for Blender
 Modeling by Hand Building a bimanual gesture based 3D user interface for Blender Tatu Harviainen Helsinki University of Technology Telecommunications Software and Multimedia Laboratory Content 1. Background
Modeling by Hand Building a bimanual gesture based 3D user interface for Blender Tatu Harviainen Helsinki University of Technology Telecommunications Software and Multimedia Laboratory Content 1. Background
Development Scheme of JewelSense: Haptic-based Sculpting Tool for Jewelry Design
 Development Scheme of JewelSense: Haptic-based Sculpting Tool for Jewelry Design S. Wannarumon Kielarova Department of Industrial Engineering, Naresuan University, Phitsanulok 65000 * Corresponding Author
Development Scheme of JewelSense: Haptic-based Sculpting Tool for Jewelry Design S. Wannarumon Kielarova Department of Industrial Engineering, Naresuan University, Phitsanulok 65000 * Corresponding Author
LOOKING AHEAD: UE4 VR Roadmap. Nick Whiting Technical Director VR / AR
 LOOKING AHEAD: UE4 VR Roadmap Nick Whiting Technical Director VR / AR HEADLINE AND IMAGE LAYOUT RECENT DEVELOPMENTS RECENT DEVELOPMENTS At Epic, we drive our engine development by creating content. We
LOOKING AHEAD: UE4 VR Roadmap Nick Whiting Technical Director VR / AR HEADLINE AND IMAGE LAYOUT RECENT DEVELOPMENTS RECENT DEVELOPMENTS At Epic, we drive our engine development by creating content. We
Haptics CS327A
 Haptics CS327A - 217 hap tic adjective relating to the sense of touch or to the perception and manipulation of objects using the senses of touch and proprioception 1 2 Slave Master 3 Courtesy of Walischmiller
Haptics CS327A - 217 hap tic adjective relating to the sense of touch or to the perception and manipulation of objects using the senses of touch and proprioception 1 2 Slave Master 3 Courtesy of Walischmiller
Immersive Visualization and Collaboration with LS-PrePost-VR and LS-PrePost-Remote
 8 th International LS-DYNA Users Conference Visualization Immersive Visualization and Collaboration with LS-PrePost-VR and LS-PrePost-Remote Todd J. Furlong Principal Engineer - Graphics and Visualization
8 th International LS-DYNA Users Conference Visualization Immersive Visualization and Collaboration with LS-PrePost-VR and LS-PrePost-Remote Todd J. Furlong Principal Engineer - Graphics and Visualization
Subject Description Form. Upon completion of the subject, students will be able to:
 Subject Description Form Subject Code Subject Title EIE408 Principles of Virtual Reality Credit Value 3 Level 4 Pre-requisite/ Corequisite/ Exclusion Objectives Intended Subject Learning Outcomes Nil To
Subject Description Form Subject Code Subject Title EIE408 Principles of Virtual Reality Credit Value 3 Level 4 Pre-requisite/ Corequisite/ Exclusion Objectives Intended Subject Learning Outcomes Nil To
HeroX - Untethered VR Training in Sync'ed Physical Spaces
 Page 1 of 6 HeroX - Untethered VR Training in Sync'ed Physical Spaces Above and Beyond - Integrating Robotics In previous research work I experimented with multiple robots remotely controlled by people
Page 1 of 6 HeroX - Untethered VR Training in Sync'ed Physical Spaces Above and Beyond - Integrating Robotics In previous research work I experimented with multiple robots remotely controlled by people
MECHANICAL DESIGN LEARNING ENVIRONMENTS BASED ON VIRTUAL REALITY TECHNOLOGIES
 INTERNATIONAL CONFERENCE ON ENGINEERING AND PRODUCT DESIGN EDUCATION 4 & 5 SEPTEMBER 2008, UNIVERSITAT POLITECNICA DE CATALUNYA, BARCELONA, SPAIN MECHANICAL DESIGN LEARNING ENVIRONMENTS BASED ON VIRTUAL
INTERNATIONAL CONFERENCE ON ENGINEERING AND PRODUCT DESIGN EDUCATION 4 & 5 SEPTEMBER 2008, UNIVERSITAT POLITECNICA DE CATALUNYA, BARCELONA, SPAIN MECHANICAL DESIGN LEARNING ENVIRONMENTS BASED ON VIRTUAL
Physical Presence in Virtual Worlds using PhysX
 Physical Presence in Virtual Worlds using PhysX One of the biggest problems with interactive applications is how to suck the user into the experience, suspending their sense of disbelief so that they are
Physical Presence in Virtual Worlds using PhysX One of the biggest problems with interactive applications is how to suck the user into the experience, suspending their sense of disbelief so that they are
Overview of current developments in haptic APIs
 Central European Seminar on Computer Graphics for students, 2011 AUTHOR: Petr Kadleček SUPERVISOR: Petr Kmoch Overview of current developments in haptic APIs Presentation Haptics Haptic programming Haptic
Central European Seminar on Computer Graphics for students, 2011 AUTHOR: Petr Kadleček SUPERVISOR: Petr Kmoch Overview of current developments in haptic APIs Presentation Haptics Haptic programming Haptic
Understanding OpenGL
 This document provides an overview of the OpenGL implementation in Boris Red. About OpenGL OpenGL is a cross-platform standard for 3D acceleration. GL stands for graphics library. Open refers to the ongoing,
This document provides an overview of the OpenGL implementation in Boris Red. About OpenGL OpenGL is a cross-platform standard for 3D acceleration. GL stands for graphics library. Open refers to the ongoing,
MRT: Mixed-Reality Tabletop
 MRT: Mixed-Reality Tabletop Students: Dan Bekins, Jonathan Deutsch, Matthew Garrett, Scott Yost PIs: Daniel Aliaga, Dongyan Xu August 2004 Goals Create a common locus for virtual interaction without having
MRT: Mixed-Reality Tabletop Students: Dan Bekins, Jonathan Deutsch, Matthew Garrett, Scott Yost PIs: Daniel Aliaga, Dongyan Xu August 2004 Goals Create a common locus for virtual interaction without having
 VEWL: A Framework for Building a Windowing Interface in a Virtual Environment Daniel Larimer and Doug A. Bowman Dept. of Computer Science, Virginia Tech, 660 McBryde, Blacksburg, VA dlarimer@vt.edu, bowman@vt.edu
VEWL: A Framework for Building a Windowing Interface in a Virtual Environment Daniel Larimer and Doug A. Bowman Dept. of Computer Science, Virginia Tech, 660 McBryde, Blacksburg, VA dlarimer@vt.edu, bowman@vt.edu
Toward an Augmented Reality System for Violin Learning Support
 Toward an Augmented Reality System for Violin Learning Support Hiroyuki Shiino, François de Sorbier, and Hideo Saito Graduate School of Science and Technology, Keio University, Yokohama, Japan {shiino,fdesorbi,saito}@hvrl.ics.keio.ac.jp
Toward an Augmented Reality System for Violin Learning Support Hiroyuki Shiino, François de Sorbier, and Hideo Saito Graduate School of Science and Technology, Keio University, Yokohama, Japan {shiino,fdesorbi,saito}@hvrl.ics.keio.ac.jp
A Modular Architecture for an Interactive Real-Time Simulation and Training Environment for Satellite On-Orbit Servicing
 A Modular Architecture for an Interactive Real-Time Simulation and Training Environment for Satellite On-Orbit Servicing Robin Wolff German Aerospace Center (DLR), Germany Slide 1 Outline! Motivation!
A Modular Architecture for an Interactive Real-Time Simulation and Training Environment for Satellite On-Orbit Servicing Robin Wolff German Aerospace Center (DLR), Germany Slide 1 Outline! Motivation!
By: Celine, Yan Ran, Yuolmae. Image from oss
 IMMERSION By: Celine, Yan Ran, Yuolmae Image from oss Content 1. Char Davies 2. Osmose 3. The Ultimate Display, Ivan Sutherland 4. Virtual Environments, Scott Fisher Artist A Canadian contemporary artist
IMMERSION By: Celine, Yan Ran, Yuolmae Image from oss Content 1. Char Davies 2. Osmose 3. The Ultimate Display, Ivan Sutherland 4. Virtual Environments, Scott Fisher Artist A Canadian contemporary artist
- applications on same or different network node of the workstation - portability of application software - multiple displays - open architecture
 12 Window Systems - A window system manages a computer screen. - Divides the screen into overlapping regions. - Each region displays output from a particular application. X window system is widely used
12 Window Systems - A window system manages a computer screen. - Divides the screen into overlapping regions. - Each region displays output from a particular application. X window system is widely used
User Manual SCANIFY F3D2001. Version 1.0. Revision Date:
 User Manual SCANIFY F3D2001 Version 1.0 Revision Date: 2015.01.02 Contents SCANIFY Profile 2 Set-up 3 - Registering your device and locating your serial number - Setting up your scanner 3 Taking a scan
User Manual SCANIFY F3D2001 Version 1.0 Revision Date: 2015.01.02 Contents SCANIFY Profile 2 Set-up 3 - Registering your device and locating your serial number - Setting up your scanner 3 Taking a scan
VR System Input & Tracking
 Human-Computer Interface VR System Input & Tracking 071011-1 2017 년가을학기 9/13/2017 박경신 System Software User Interface Software Input Devices Output Devices User Human-Virtual Reality Interface User Monitoring
Human-Computer Interface VR System Input & Tracking 071011-1 2017 년가을학기 9/13/2017 박경신 System Software User Interface Software Input Devices Output Devices User Human-Virtual Reality Interface User Monitoring
Kinect Interface for UC-win/Road: Application to Tele-operation of Small Robots
 Kinect Interface for UC-win/Road: Application to Tele-operation of Small Robots Hafid NINISS Forum8 - Robot Development Team Abstract: The purpose of this work is to develop a man-machine interface for
Kinect Interface for UC-win/Road: Application to Tele-operation of Small Robots Hafid NINISS Forum8 - Robot Development Team Abstract: The purpose of this work is to develop a man-machine interface for
Chapter 1 Virtual World Fundamentals
 Chapter 1 Virtual World Fundamentals 1.0 What Is A Virtual World? {Definition} Virtual: to exist in effect, though not in actual fact. You are probably familiar with arcade games such as pinball and target
Chapter 1 Virtual World Fundamentals 1.0 What Is A Virtual World? {Definition} Virtual: to exist in effect, though not in actual fact. You are probably familiar with arcade games such as pinball and target
VR/AR Concepts in Architecture And Available Tools
 VR/AR Concepts in Architecture And Available Tools Peter Kán Interactive Media Systems Group Institute of Software Technology and Interactive Systems TU Wien Outline 1. What can you do with virtual reality
VR/AR Concepts in Architecture And Available Tools Peter Kán Interactive Media Systems Group Institute of Software Technology and Interactive Systems TU Wien Outline 1. What can you do with virtual reality
Interacting within Virtual Worlds (based on talks by Greg Welch and Mark Mine)
") Interacting within Virtual Worlds (based on talks by Greg Welch and Mark Mine) Presentation Working in a virtual world Interaction principles Interaction examples Why VR in the First Place? Direct perception
Interacting within Virtual Worlds (based on talks by Greg Welch and Mark Mine) Presentation Working in a virtual world Interaction principles Interaction examples Why VR in the First Place? Direct perception
HAPTIC DEVICES FOR DESKTOP VIRTUAL PROTOTYPING APPLICATIONS
 The 3rd International Conference on Computational Mechanics and Virtual Engineering COMEC 2009 29 30 OCTOBER 2009, Brasov, Romania HAPTIC DEVICES FOR DESKTOP VIRTUAL PROTOTYPING APPLICATIONS A. Fratu 1,
The 3rd International Conference on Computational Mechanics and Virtual Engineering COMEC 2009 29 30 OCTOBER 2009, Brasov, Romania HAPTIC DEVICES FOR DESKTOP VIRTUAL PROTOTYPING APPLICATIONS A. Fratu 1,
PHYSICAL ROBOTS PROGRAMMING BY IMITATION USING VIRTUAL ROBOT PROTOTYPES
 Bulletin of the Transilvania University of Braşov Series I: Engineering Sciences Vol. 6 (55) No. 2-2013 PHYSICAL ROBOTS PROGRAMMING BY IMITATION USING VIRTUAL ROBOT PROTOTYPES A. FRATU 1 M. FRATU 2 Abstract:
Bulletin of the Transilvania University of Braşov Series I: Engineering Sciences Vol. 6 (55) No. 2-2013 PHYSICAL ROBOTS PROGRAMMING BY IMITATION USING VIRTUAL ROBOT PROTOTYPES A. FRATU 1 M. FRATU 2 Abstract:
ROBOT DESIGN AND DIGITAL CONTROL
 Revista Mecanisme şi Manipulatoare Vol. 5, Nr. 1, 2006, pp. 57-62 ARoTMM - IFToMM ROBOT DESIGN AND DIGITAL CONTROL Ovidiu ANTONESCU Lecturer dr. ing., University Politehnica of Bucharest, Mechanism and
Revista Mecanisme şi Manipulatoare Vol. 5, Nr. 1, 2006, pp. 57-62 ARoTMM - IFToMM ROBOT DESIGN AND DIGITAL CONTROL Ovidiu ANTONESCU Lecturer dr. ing., University Politehnica of Bucharest, Mechanism and
Integrating PhysX and OpenHaptics: Efficient Force Feedback Generation Using Physics Engine and Haptic Devices
 This is the Pre-Published Version. Integrating PhysX and Opens: Efficient Force Feedback Generation Using Physics Engine and Devices 1 Leon Sze-Ho Chan 1, Kup-Sze Choi 1 School of Nursing, Hong Kong Polytechnic
This is the Pre-Published Version. Integrating PhysX and Opens: Efficient Force Feedback Generation Using Physics Engine and Devices 1 Leon Sze-Ho Chan 1, Kup-Sze Choi 1 School of Nursing, Hong Kong Polytechnic
AR 2 kanoid: Augmented Reality ARkanoid
 AR 2 kanoid: Augmented Reality ARkanoid B. Smith and R. Gosine C-CORE and Memorial University of Newfoundland Abstract AR 2 kanoid, Augmented Reality ARkanoid, is an augmented reality version of the popular
AR 2 kanoid: Augmented Reality ARkanoid B. Smith and R. Gosine C-CORE and Memorial University of Newfoundland Abstract AR 2 kanoid, Augmented Reality ARkanoid, is an augmented reality version of the popular
Chapter 1 - Introduction
 1 "We all agree that your theory is crazy, but is it crazy enough?" Niels Bohr (1885-1962) Chapter 1 - Introduction Augmented reality (AR) is the registration of projected computer-generated images over
1 "We all agree that your theory is crazy, but is it crazy enough?" Niels Bohr (1885-1962) Chapter 1 - Introduction Augmented reality (AR) is the registration of projected computer-generated images over
Virtual Reality: a way to prepare and optimize operations in decommissioning projects
 Virtual Reality: a way to prepare and optimize operations in decommissioning projects Caroline Chabal 17th February 2016 Virtual Reality: a way to prepare and optimize operations in decommissioning projects
Virtual Reality: a way to prepare and optimize operations in decommissioning projects Caroline Chabal 17th February 2016 Virtual Reality: a way to prepare and optimize operations in decommissioning projects
The value of VR for professionals. Sébastien Cb MiddleVR.com
 The value of VR for professionals Sébastien Cb Kuntz CEO @SebKuntz @MiddleVR MiddleVR.com Virtual reality for professionals Team of VR experts Founded in 2012 VR Content creation professional services
The value of VR for professionals Sébastien Cb Kuntz CEO @SebKuntz @MiddleVR MiddleVR.com Virtual reality for professionals Team of VR experts Founded in 2012 VR Content creation professional services
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics
 Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
Virtual- and Augmented Reality in Education Intel Webinar. Hannes Kaufmann
 Virtual- and Augmented Reality in Education Intel Webinar Hannes Kaufmann Associate Professor Institute of Software Technology and Interactive Systems Vienna University of Technology kaufmann@ims.tuwien.ac.at
Virtual- and Augmented Reality in Education Intel Webinar Hannes Kaufmann Associate Professor Institute of Software Technology and Interactive Systems Vienna University of Technology kaufmann@ims.tuwien.ac.at
iwindow Concept of an intelligent window for machine tools using augmented reality
 iwindow Concept of an intelligent window for machine tools using augmented reality Sommer, P.; Atmosudiro, A.; Schlechtendahl, J.; Lechler, A.; Verl, A. Institute for Control Engineering of Machine Tools
iwindow Concept of an intelligent window for machine tools using augmented reality Sommer, P.; Atmosudiro, A.; Schlechtendahl, J.; Lechler, A.; Verl, A. Institute for Control Engineering of Machine Tools
VIRTUAL REALITY FOR NONDESTRUCTIVE EVALUATION APPLICATIONS
 VIRTUAL REALITY FOR NONDESTRUCTIVE EVALUATION APPLICATIONS Jaejoon Kim, S. Mandayam, S. Udpa, W. Lord, and L. Udpa Department of Electrical and Computer Engineering Iowa State University Ames, Iowa 500
VIRTUAL REALITY FOR NONDESTRUCTIVE EVALUATION APPLICATIONS Jaejoon Kim, S. Mandayam, S. Udpa, W. Lord, and L. Udpa Department of Electrical and Computer Engineering Iowa State University Ames, Iowa 500
Robot Task-Level Programming Language and Simulation
 Robot Task-Level Programming Language and Simulation M. Samaka Abstract This paper presents the development of a software application for Off-line robot task programming and simulation. Such application
Robot Task-Level Programming Language and Simulation M. Samaka Abstract This paper presents the development of a software application for Off-line robot task programming and simulation. Such application
VR-programming. Fish Tank VR. To drive enhanced virtual reality display setups like. Monitor-based systems Use i.e.
 VR-programming To drive enhanced virtual reality display setups like responsive workbenches walls head-mounted displays boomes domes caves Fish Tank VR Monitor-based systems Use i.e. shutter glasses 3D
VR-programming To drive enhanced virtual reality display setups like responsive workbenches walls head-mounted displays boomes domes caves Fish Tank VR Monitor-based systems Use i.e. shutter glasses 3D
Vendor Response Sheet Technical Specifications
 TENDER NOTICE NO: IPR/TN/PUR/TPT/ET/17-18/38 DATED 27-2-2018 Vendor Response Sheet Technical Specifications 1. 3D Fully Immersive Projection and Display System Item No. 1 2 3 4 5 6 Specifications A complete
TENDER NOTICE NO: IPR/TN/PUR/TPT/ET/17-18/38 DATED 27-2-2018 Vendor Response Sheet Technical Specifications 1. 3D Fully Immersive Projection and Display System Item No. 1 2 3 4 5 6 Specifications A complete
Lab Design of FANUC Robot Operation for Engineering Technology Major Students
 Paper ID #21185 Lab Design of FANUC Robot Operation for Engineering Technology Major Students Dr. Maged Mikhail, Purdue University Northwest Dr. Maged B.Mikhail, Assistant Professor, Mechatronics Engineering
Paper ID #21185 Lab Design of FANUC Robot Operation for Engineering Technology Major Students Dr. Maged Mikhail, Purdue University Northwest Dr. Maged B.Mikhail, Assistant Professor, Mechatronics Engineering
LASER ASSISTED COMBINED TELEOPERATION AND AUTONOMOUS CONTROL
 ANS EPRRSD - 13 th Robotics & remote Systems for Hazardous Environments 11 th Emergency Preparedness & Response Knoxville, TN, August 7-10, 2011, on CD-ROM, American Nuclear Society, LaGrange Park, IL
ANS EPRRSD - 13 th Robotics & remote Systems for Hazardous Environments 11 th Emergency Preparedness & Response Knoxville, TN, August 7-10, 2011, on CD-ROM, American Nuclear Society, LaGrange Park, IL
Haptic Rendering and Volumetric Visualization with SenSitus
 Haptic Rendering and Volumetric Visualization with SenSitus Stefan Birmanns, Ph.D. Department of Molecular Biology The Scripps Research Institute 10550 N. Torrey Pines Road, Mail TPC6 La Jolla, California,
Haptic Rendering and Volumetric Visualization with SenSitus Stefan Birmanns, Ph.D. Department of Molecular Biology The Scripps Research Institute 10550 N. Torrey Pines Road, Mail TPC6 La Jolla, California,
ADVANCED WHACK A MOLE VR
 ADVANCED WHACK A MOLE VR Tal Pilo, Or Gitli and Mirit Alush TABLE OF CONTENTS Introduction 2 Development Environment 3 Application overview 4-8 Development Process - 9 1 Introduction We developed a VR
ADVANCED WHACK A MOLE VR Tal Pilo, Or Gitli and Mirit Alush TABLE OF CONTENTS Introduction 2 Development Environment 3 Application overview 4-8 Development Process - 9 1 Introduction We developed a VR
P15083: Virtual Visualization for Anatomy Teaching, Training and Surgery Simulation Applications. Gate Review
 P15083: Virtual Visualization for Anatomy Teaching, Training and Surgery Simulation Applications Gate Review Agenda review of starting objectives customer requirements, engineering requirements 50% goal,
P15083: Virtual Visualization for Anatomy Teaching, Training and Surgery Simulation Applications Gate Review Agenda review of starting objectives customer requirements, engineering requirements 50% goal,
An Introduction into Virtual Reality Environments. Stefan Seipel
 An Introduction into Virtual Reality Environments Stefan Seipel stefan.seipel@hig.se What is Virtual Reality? Technically defined: VR is a medium in terms of a collection of technical hardware (similar
An Introduction into Virtual Reality Environments Stefan Seipel stefan.seipel@hig.se What is Virtual Reality? Technically defined: VR is a medium in terms of a collection of technical hardware (similar
EXPERIMENTAL BILATERAL CONTROL TELEMANIPULATION USING A VIRTUAL EXOSKELETON
 EXPERIMENTAL BILATERAL CONTROL TELEMANIPULATION USING A VIRTUAL EXOSKELETON Josep Amat 1, Alícia Casals 2, Manel Frigola 2, Enric Martín 2 1Robotics Institute. (IRI) UPC / CSIC Llorens Artigas 4-6, 2a
EXPERIMENTAL BILATERAL CONTROL TELEMANIPULATION USING A VIRTUAL EXOSKELETON Josep Amat 1, Alícia Casals 2, Manel Frigola 2, Enric Martín 2 1Robotics Institute. (IRI) UPC / CSIC Llorens Artigas 4-6, 2a
What is Virtual Reality? What is Virtual Reality? An Introduction into Virtual Reality Environments. Stefan Seipel
 An Introduction into Virtual Reality Environments What is Virtual Reality? Technically defined: Stefan Seipel stefan.seipel@hig.se VR is a medium in terms of a collection of technical hardware (similar
An Introduction into Virtual Reality Environments What is Virtual Reality? Technically defined: Stefan Seipel stefan.seipel@hig.se VR is a medium in terms of a collection of technical hardware (similar
6 System architecture
 6 System architecture is an application for interactively controlling the animation of VRML avatars. It uses the pen interaction technique described in Chapter 3 - Interaction technique. It is used in
6 System architecture is an application for interactively controlling the animation of VRML avatars. It uses the pen interaction technique described in Chapter 3 - Interaction technique. It is used in
The Application of Virtual Reality in Art Design: A New Approach CHEN Dalei 1, a
 International Conference on Education Technology, Management and Humanities Science (ETMHS 2015) The Application of Virtual Reality in Art Design: A New Approach CHEN Dalei 1, a 1 School of Art, Henan
International Conference on Education Technology, Management and Humanities Science (ETMHS 2015) The Application of Virtual Reality in Art Design: A New Approach CHEN Dalei 1, a 1 School of Art, Henan
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Laser-Assisted Telerobotic Control for Enhancing Manipulation Capabilities of Persons with Disabilities
 The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Laser-Assisted Telerobotic Control for Enhancing Manipulation Capabilities of Persons with
The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Laser-Assisted Telerobotic Control for Enhancing Manipulation Capabilities of Persons with
Control and robotics remote laboratory for engineering education
 Control and robotics remote laboratory for engineering education R. Šafarič, M. Truntič, D. Hercog and G. Pačnik University of Maribor, Faculty of electrical engineering and computer science, Maribor,
Control and robotics remote laboratory for engineering education R. Šafarič, M. Truntič, D. Hercog and G. Pačnik University of Maribor, Faculty of electrical engineering and computer science, Maribor,
Construction of visualization system for scientific experiments
 Construction of visualization system for scientific experiments A. V. Bogdanov a, A. I. Ivashchenko b, E. A. Milova c, K. V. Smirnov d Saint Petersburg State University, 7/9 University Emb., Saint Petersburg,
Construction of visualization system for scientific experiments A. V. Bogdanov a, A. I. Ivashchenko b, E. A. Milova c, K. V. Smirnov d Saint Petersburg State University, 7/9 University Emb., Saint Petersburg,
THE PINNACLE OF VIRTUAL REALITY CONTROLLERS
 THE PINNACLE OF VIRTUAL REALITY CONTROLLERS PRODUCT INFORMATION The Manus VR Glove is a high-end data glove that brings intuitive interaction to virtual reality. Its unique design and cutting edge technology
THE PINNACLE OF VIRTUAL REALITY CONTROLLERS PRODUCT INFORMATION The Manus VR Glove is a high-end data glove that brings intuitive interaction to virtual reality. Its unique design and cutting edge technology
RV - AULA 05 - PSI3502/2018. User Experience, Human Computer Interaction and UI
 RV - AULA 05 - PSI3502/2018 User Experience, Human Computer Interaction and UI Outline Discuss some general principles of UI (user interface) design followed by an overview of typical interaction tasks
RV - AULA 05 - PSI3502/2018 User Experience, Human Computer Interaction and UI Outline Discuss some general principles of UI (user interface) design followed by an overview of typical interaction tasks
VR Haptic Interfaces for Teleoperation : an Evaluation Study
 VR Haptic Interfaces for Teleoperation : an Evaluation Study Renaud Ott, Mario Gutiérrez, Daniel Thalmann, Frédéric Vexo Virtual Reality Laboratory Ecole Polytechnique Fédérale de Lausanne (EPFL) CH-1015
VR Haptic Interfaces for Teleoperation : an Evaluation Study Renaud Ott, Mario Gutiérrez, Daniel Thalmann, Frédéric Vexo Virtual Reality Laboratory Ecole Polytechnique Fédérale de Lausanne (EPFL) CH-1015
A NOVEL VISION SYSTEM-ON-CHIP FOR EMBEDDED IMAGE ACQUISITION AND PROCESSING
 A NOVEL VISION SYSTEM-ON-CHIP FOR EMBEDDED IMAGE ACQUISITION AND PROCESSING Neuartiges System-on-Chip für die eingebettete Bilderfassung und -verarbeitung Dr. Jens Döge, Head of Image Acquisition and Processing
A NOVEL VISION SYSTEM-ON-CHIP FOR EMBEDDED IMAGE ACQUISITION AND PROCESSING Neuartiges System-on-Chip für die eingebettete Bilderfassung und -verarbeitung Dr. Jens Döge, Head of Image Acquisition and Processing
Wireless Master-Slave Embedded Controller for a Teleoperated Anthropomorphic Robotic Arm with Gripping Force Sensing
 Wireless Master-Slave Embedded Controller for a Teleoperated Anthropomorphic Robotic Arm with Gripping Force Sensing Presented by: Benjamin B. Rhoades ECGR 6185 Adv. Embedded Systems January 16 th 2013
Wireless Master-Slave Embedded Controller for a Teleoperated Anthropomorphic Robotic Arm with Gripping Force Sensing Presented by: Benjamin B. Rhoades ECGR 6185 Adv. Embedded Systems January 16 th 2013
3D User Interaction CS-525U: Robert W. Lindeman. Intro to 3D UI. Department of Computer Science. Worcester Polytechnic Institute.
 CS-525U: 3D User Interaction Intro to 3D UI Robert W. Lindeman Worcester Polytechnic Institute Department of Computer Science gogo@wpi.edu Why Study 3D UI? Relevant to real-world tasks Can use familiarity
CS-525U: 3D User Interaction Intro to 3D UI Robert W. Lindeman Worcester Polytechnic Institute Department of Computer Science gogo@wpi.edu Why Study 3D UI? Relevant to real-world tasks Can use familiarity
Augmented and Virtual Reality
 CS-3120 Human-Computer Interaction Augmented and Virtual Reality Mikko Kytö 7.11.2017 From Real to Virtual [1] Milgram, P., & Kishino, F. (1994). A taxonomy of mixed reality visual displays. IEICE TRANSACTIONS
CS-3120 Human-Computer Interaction Augmented and Virtual Reality Mikko Kytö 7.11.2017 From Real to Virtual [1] Milgram, P., & Kishino, F. (1994). A taxonomy of mixed reality visual displays. IEICE TRANSACTIONS
Intelligent interaction
 BionicWorkplace: autonomously learning workstation for human-machine collaboration Intelligent interaction Face to face, hand in hand. The BionicWorkplace shows the extent to which human-machine collaboration
BionicWorkplace: autonomously learning workstation for human-machine collaboration Intelligent interaction Face to face, hand in hand. The BionicWorkplace shows the extent to which human-machine collaboration
Advancements in Gesture Recognition Technology
 IOSR Journal of VLSI and Signal Processing (IOSR-JVSP) Volume 4, Issue 4, Ver. I (Jul-Aug. 2014), PP 01-07 e-issn: 2319 4200, p-issn No. : 2319 4197 Advancements in Gesture Recognition Technology 1 Poluka
IOSR Journal of VLSI and Signal Processing (IOSR-JVSP) Volume 4, Issue 4, Ver. I (Jul-Aug. 2014), PP 01-07 e-issn: 2319 4200, p-issn No. : 2319 4197 Advancements in Gesture Recognition Technology 1 Poluka
R (2) Controlling System Application with hands by identifying movements through Camera
 Controlling System Application with hands by identifying movements through Camera") R (2) N (5) Oral (3) Total (10) Dated Sign Assignment Group: C Problem Definition: Controlling System Application with hands by identifying movements through Camera Prerequisite: 1. Web Cam Connectivity
R (2) N (5) Oral (3) Total (10) Dated Sign Assignment Group: C Problem Definition: Controlling System Application with hands by identifying movements through Camera Prerequisite: 1. Web Cam Connectivity
Computer Assisted Medical Interventions
 Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
The Application of Human-Computer Interaction Idea in Computer Aided Industrial Design
 The Application of Human-Computer Interaction Idea in Computer Aided Industrial Design Zhang Liang e-mail: 76201691@qq.com Zhao Jian e-mail: 84310626@qq.com Zheng Li-nan e-mail: 1021090387@qq.com Li Nan
The Application of Human-Computer Interaction Idea in Computer Aided Industrial Design Zhang Liang e-mail: 76201691@qq.com Zhao Jian e-mail: 84310626@qq.com Zheng Li-nan e-mail: 1021090387@qq.com Li Nan
What is Virtual Reality? What is Virtual Reality? An Introduction into Virtual Reality Environments
 An Introduction into Virtual Reality Environments What is Virtual Reality? Technically defined: Stefan Seipel, MDI Inst. f. Informationsteknologi stefan.seipel@hci.uu.se VR is a medium in terms of a collection
An Introduction into Virtual Reality Environments What is Virtual Reality? Technically defined: Stefan Seipel, MDI Inst. f. Informationsteknologi stefan.seipel@hci.uu.se VR is a medium in terms of a collection
HMD based VR Service Framework. July Web3D Consortium Kwan-Hee Yoo Chungbuk National University
 HMD based VR Service Framework July 31 2017 Web3D Consortium Kwan-Hee Yoo Chungbuk National University khyoo@chungbuk.ac.kr What is Virtual Reality? Making an electronic world seem real and interactive
HMD based VR Service Framework July 31 2017 Web3D Consortium Kwan-Hee Yoo Chungbuk National University khyoo@chungbuk.ac.kr What is Virtual Reality? Making an electronic world seem real and interactive
A Hybrid Immersive / Non-Immersive
 A Hybrid Immersive / Non-Immersive Virtual Environment Workstation N96-057 Department of the Navy Report Number 97268 Awz~POved *om prwihc?e1oaa Submitted by: Fakespace, Inc. 241 Polaris Ave. Mountain
A Hybrid Immersive / Non-Immersive Virtual Environment Workstation N96-057 Department of the Navy Report Number 97268 Awz~POved *om prwihc?e1oaa Submitted by: Fakespace, Inc. 241 Polaris Ave. Mountain
CSE 190: Virtual Reality Technologies LECTURE #7: VR DISPLAYS
 CSE 190: Virtual Reality Technologies LECTURE #7: VR DISPLAYS Announcements Homework project 2 Due tomorrow May 5 at 2pm To be demonstrated in VR lab B210 Even hour teams start at 2pm Odd hour teams start
CSE 190: Virtual Reality Technologies LECTURE #7: VR DISPLAYS Announcements Homework project 2 Due tomorrow May 5 at 2pm To be demonstrated in VR lab B210 Even hour teams start at 2pm Odd hour teams start
Software Development & Education Center. Inventor 2013
 Software Development & Education Center Inventor 2013 Autodesk Inventor Essential Objective To provide students with a thorough understanding of the principal 3D design, validation, and documentation processes
Software Development & Education Center Inventor 2013 Autodesk Inventor Essential Objective To provide students with a thorough understanding of the principal 3D design, validation, and documentation processes
Easy Robot Programming for Industrial Manipulators by Manual Volume Sweeping
 Easy Robot Programming for Industrial Manipulators by Manual Volume Sweeping *Yusuke MAEDA, Tatsuya USHIODA and Satoshi MAKITA (Yokohama National University) MAEDA Lab INTELLIGENT & INDUSTRIAL ROBOTICS
Easy Robot Programming for Industrial Manipulators by Manual Volume Sweeping *Yusuke MAEDA, Tatsuya USHIODA and Satoshi MAKITA (Yokohama National University) MAEDA Lab INTELLIGENT & INDUSTRIAL ROBOTICS
Introduction to Virtual Reality (based on a talk by Bill Mark)
") Introduction to Virtual Reality (based on a talk by Bill Mark) I will talk about... Why do we want Virtual Reality? What is needed for a VR system? Examples of VR systems Research problems in VR Most Computers
Introduction to Virtual Reality (based on a talk by Bill Mark) I will talk about... Why do we want Virtual Reality? What is needed for a VR system? Examples of VR systems Research problems in VR Most Computers
Lab 7: Introduction to Webots and Sensor Modeling
 Lab 7: Introduction to Webots and Sensor Modeling This laboratory requires the following software: Webots simulator C development tools (gcc, make, etc.) The laboratory duration is approximately two hours.
Lab 7: Introduction to Webots and Sensor Modeling This laboratory requires the following software: Webots simulator C development tools (gcc, make, etc.) The laboratory duration is approximately two hours.
Job Description. Commitment: Must be available to work full-time hours, M-F for weeks beginning Summer of 2018.
 Research Intern Director of Research We are seeking a summer intern to support the team to develop prototype 3D sensing systems based on state-of-the-art sensing technologies along with computer vision
Research Intern Director of Research We are seeking a summer intern to support the team to develop prototype 3D sensing systems based on state-of-the-art sensing technologies along with computer vision
A Multimodal Locomotion User Interface for Immersive Geospatial Information Systems
 F. Steinicke, G. Bruder, H. Frenz 289 A Multimodal Locomotion User Interface for Immersive Geospatial Information Systems Frank Steinicke 1, Gerd Bruder 1, Harald Frenz 2 1 Institute of Computer Science,
F. Steinicke, G. Bruder, H. Frenz 289 A Multimodal Locomotion User Interface for Immersive Geospatial Information Systems Frank Steinicke 1, Gerd Bruder 1, Harald Frenz 2 1 Institute of Computer Science,
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
Interface Design V: Beyond the Desktop
 Interface Design V: Beyond the Desktop Rob Procter Further Reading Dix et al., chapter 4, p. 153-161 and chapter 15. Norman, The Invisible Computer, MIT Press, 1998, chapters 4 and 15. 11/25/01 CS4: HCI
Interface Design V: Beyond the Desktop Rob Procter Further Reading Dix et al., chapter 4, p. 153-161 and chapter 15. Norman, The Invisible Computer, MIT Press, 1998, chapters 4 and 15. 11/25/01 CS4: HCI
Practical Data Visualization and Virtual Reality. Virtual Reality VR Display Systems. Karljohan Lundin Palmerius
 Practical Data Visualization and Virtual Reality Virtual Reality VR Display Systems Karljohan Lundin Palmerius Synopsis Virtual Reality basics Common display systems Visual modality Sound modality Interaction
Practical Data Visualization and Virtual Reality Virtual Reality VR Display Systems Karljohan Lundin Palmerius Synopsis Virtual Reality basics Common display systems Visual modality Sound modality Interaction
Technologies. Philippe Fuchs Ecole des Mines, ParisTech, Paris, France. Virtual Reality: Concepts and. Guillaume Moreau.
 Virtual Reality: Concepts and Technologies Editors Philippe Fuchs Ecole des Mines, ParisTech, Paris, France Guillaume Moreau Ecole Centrale de Nantes, CERMA, Nantes, France Pascal Guitton INRIA, University
Virtual Reality: Concepts and Technologies Editors Philippe Fuchs Ecole des Mines, ParisTech, Paris, France Guillaume Moreau Ecole Centrale de Nantes, CERMA, Nantes, France Pascal Guitton INRIA, University
PHYSICS-BASED INTERACTIONS IN VIRTUAL REALITY MAX LAMMERS LEAD SENSE GLOVE
 PHYSICS-BASED INTERACTIONS IN VIRTUAL REALITY MAX LAMMERS LEAD DEVELOPER @ SENSE GLOVE Current Interactions in VR Input Device Virtual Hand Model (VHM) Sense Glove Accuracy (per category) Optics based
PHYSICS-BASED INTERACTIONS IN VIRTUAL REALITY MAX LAMMERS LEAD DEVELOPER @ SENSE GLOVE Current Interactions in VR Input Device Virtual Hand Model (VHM) Sense Glove Accuracy (per category) Optics based
UNIT VI. Current approaches to programming are classified as into two major categories:
 Unit VI 1 UNIT VI ROBOT PROGRAMMING A robot program may be defined as a path in space to be followed by the manipulator, combined with the peripheral actions that support the work cycle. Peripheral actions
Unit VI 1 UNIT VI ROBOT PROGRAMMING A robot program may be defined as a path in space to be followed by the manipulator, combined with the peripheral actions that support the work cycle. Peripheral actions
Development of a telepresence agent
 Author: Chung-Chen Tsai, Yeh-Liang Hsu (2001-04-06); recommended: Yeh-Liang Hsu (2001-04-06); last updated: Yeh-Liang Hsu (2004-03-23). Note: This paper was first presented at. The revised paper was presented
Author: Chung-Chen Tsai, Yeh-Liang Hsu (2001-04-06); recommended: Yeh-Liang Hsu (2001-04-06); last updated: Yeh-Liang Hsu (2004-03-23). Note: This paper was first presented at. The revised paper was presented
Optimization of Cycle Time through Mastercam Virtual Simulation and Four Axis CNC Milling Machining of Camshaft
 ISSN: 2454-132X Impact factor: 4.295 (Volume2, Issue6) Available online at: www.ijariit.com Optimization of Cycle Time through Mastercam Virtual Simulation and Four Axis CNC Milling Machining of Camshaft
ISSN: 2454-132X Impact factor: 4.295 (Volume2, Issue6) Available online at: www.ijariit.com Optimization of Cycle Time through Mastercam Virtual Simulation and Four Axis CNC Milling Machining of Camshaft
3D Interaction Techniques
 3D Interaction Techniques Hannes Interactive Media Systems Group (IMS) Institute of Software Technology and Interactive Systems Based on material by Chris Shaw, derived from Doug Bowman s work Why 3D Interaction?
3D Interaction Techniques Hannes Interactive Media Systems Group (IMS) Institute of Software Technology and Interactive Systems Based on material by Chris Shaw, derived from Doug Bowman s work Why 3D Interaction?
1640DCL Digital Control Lathe
 1640DCL Digital Control Lathe MACHINE SPECIFICATIONS Multiple Function CNC Lathe 1. Manual Hand wheel Operation 2. CNC G-Code Operation 16.1 swing over bed, 8.6 swing over cross-slide 2.05 diameter hole
1640DCL Digital Control Lathe MACHINE SPECIFICATIONS Multiple Function CNC Lathe 1. Manual Hand wheel Operation 2. CNC G-Code Operation 16.1 swing over bed, 8.6 swing over cross-slide 2.05 diameter hole
University of Huddersfield Repository
 University of Huddersfield Repository Xu, Zhijie, Zhao, Z. X., Wu, M.H., Liao, J. B. and Tian, G.Y. Virtual Reality Based Robot Graphic Simulation and Virtual Manufacturing System Original Citation Xu,
University of Huddersfield Repository Xu, Zhijie, Zhao, Z. X., Wu, M.H., Liao, J. B. and Tian, G.Y. Virtual Reality Based Robot Graphic Simulation and Virtual Manufacturing System Original Citation Xu,
- Modifying the histogram by changing the frequency of occurrence of each gray scale value may improve the image quality and enhance the contrast.
 11. Image Processing Image processing concerns about modifying or transforming images. Applications may include enhancing an image or adding special effects to an image. Here we will learn some of the
11. Image Processing Image processing concerns about modifying or transforming images. Applications may include enhancing an image or adding special effects to an image. Here we will learn some of the
Ubiquitous Computing Summer Episode 16: HCI. Hannes Frey and Peter Sturm University of Trier. Hannes Frey and Peter Sturm, University of Trier 1
 Episode 16: HCI Hannes Frey and Peter Sturm University of Trier University of Trier 1 Shrinking User Interface Small devices Narrow user interface Only few pixels graphical output No keyboard Mobility
Episode 16: HCI Hannes Frey and Peter Sturm University of Trier University of Trier 1 Shrinking User Interface Small devices Narrow user interface Only few pixels graphical output No keyboard Mobility
 UNIT-1 INTRODUCATION The field of robotics has its origins in science fiction. The term robot was derived from the English translation of a fantasy play written in Czechoslovakia around 1920. It took another
UNIT-1 INTRODUCATION The field of robotics has its origins in science fiction. The term robot was derived from the English translation of a fantasy play written in Czechoslovakia around 1920. It took another
Interior Design using Augmented Reality Environment
 Interior Design using Augmented Reality Environment Kalyani Pampattiwar 2, Akshay Adiyodi 1, Manasvini Agrahara 1, Pankaj Gamnani 1 Assistant Professor, Department of Computer Engineering, SIES Graduate
Interior Design using Augmented Reality Environment Kalyani Pampattiwar 2, Akshay Adiyodi 1, Manasvini Agrahara 1, Pankaj Gamnani 1 Assistant Professor, Department of Computer Engineering, SIES Graduate
Exercise 2. Point-to-Point Programs EXERCISE OBJECTIVE
 Exercise 2 Point-to-Point Programs EXERCISE OBJECTIVE In this exercise, you will learn various important terms used in the robotics field. You will also be introduced to position and control points, and
Exercise 2 Point-to-Point Programs EXERCISE OBJECTIVE In this exercise, you will learn various important terms used in the robotics field. You will also be introduced to position and control points, and
What s New In SA CHAPTER
 What s New In SA CHAPTER 1 One of the advantages of SpatialAnalyzer is that development occurs at a brisk pace. New feature requests, bug fixes, and changes are implemented quickly, giving you the opportunity
What s New In SA CHAPTER 1 One of the advantages of SpatialAnalyzer is that development occurs at a brisk pace. New feature requests, bug fixes, and changes are implemented quickly, giving you the opportunity
Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular fatigue
Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular fatigue
Haplug: A Haptic Plug for Dynamic VR Interactions
 Haplug: A Haptic Plug for Dynamic VR Interactions Nobuhisa Hanamitsu *, Ali Israr Disney Research, USA nobuhisa.hanamitsu@disneyresearch.com Abstract. We demonstrate applications of a new actuator, the
Haplug: A Haptic Plug for Dynamic VR Interactions Nobuhisa Hanamitsu *, Ali Israr Disney Research, USA nobuhisa.hanamitsu@disneyresearch.com Abstract. We demonstrate applications of a new actuator, the
THE VISIONLAB TEAM engineers - 1 physicist. Feasibility study and prototyping Hardware benchmarking Open and closed source libraries
 VISIONLAB OPENING THE VISIONLAB TEAM 2018 6 engineers - 1 physicist Feasibility study and prototyping Hardware benchmarking Open and closed source libraries Deep learning frameworks GPU frameworks FPGA
VISIONLAB OPENING THE VISIONLAB TEAM 2018 6 engineers - 1 physicist Feasibility study and prototyping Hardware benchmarking Open and closed source libraries Deep learning frameworks GPU frameworks FPGA