Non-Invasive Brain-Actuated Control of a Mobile Robot
|
|
|
- Phoebe Williamson
- 5 years ago
- Views:
Transcription
1 Non-Invasive Brain-Actuated Control of a Mobile Robot Jose del R. Millan, Frederic Renkens, Josep Mourino, Wulfram Gerstner 5/3/06 Josh Storz CSE 599E
2 BCI Introduction (paper perspective)
3 BCIs BCI = Brain Computer Interface BCIs for both able-bodied and physically-disabled people => realtime brainwave analysis. Using a virtual keyboard Moving a robotic or prosthetic device Brain state + no physical action = BCI
4 A Non-Invasive BCI: EEG EEG = electroencephalogram Brain activity recorded from electrodes on scalp According to paper: main source of the EEG signal is the synchronous activity of thousands of cortical neurons. Reading EEG signals is simple and non-invasive but does not allow the single or cluster neuron resolution other techniques can provide.
5 EEG: Evoked Potentials Automatic responses of the brain to external stimuli. Relatively simple to measure, but force subject to respond rather than initiate.
6 EEG Rhythms Most used are related to the imagination of body movements => recorded from the sensorimotor cortex. Analysis involves looking for pre-defined patterns. Other possibilities: Imagining movements Mental math Imagining language Analysis could then involve looking for embedded patterns as opposed to an overall look.
7 Paper Purpose and Motivation Robotic and prosthetic control has been shown with monkeys and implantable electrodes. Never been accomplished with humans. Goal is to show that, with only a short amount of training time and utilizing non-invasive means, a human subject can control a brain-actuated robot. Additionally, would like to show that mental control is only slightly worse than manual control.
8 Interface Protocol
9 EEG Techniques Synchronous protocols often limited to low bit rates below 0.5 bits/s => time-locked to externally paced cues. New approach uses an asynchronous protocol. Analyzes the ongoing EEG to determine the subject's mental state, which they can voluntarily change at any moment. Theoretical bandwidth between 1 and 1.5 bits/s.

10 Interface Setup Two patients, A and B. Commercial EEG cap. Measured 8 standard fronto-centro-parietal locations: F3, F4, C3, Cz, C4, P3, Pz, and P4. Sampling rate: 128 Hz.
11 Interface Setup Raw EEG potentials => suface Laplacian transform => order 2 spherical spline. This spatial filtering yields new potentials that should represent better the cortical activity due only to local sources below the electrodes. Welch periodogram algorithm to estimate power spectrum over previous second.
12 Interface Setup Averaged second segments with 50% overlap => resolution of 2 Hz. Values in 8-30 Hz normalized by the total energy in that band. => EEG sample: 96 features 8 channels * 12 components/ch 16 samples computed per second (62.5 ms delay)
13 Training Methods Subjects learned to control 3 mental tasks of their choice out of: Relax Imagine repetitive left hand/arm movements Imagine repetitive right hand/arm movements Imagine a spinning cube Successive subtraction by a fixed number Eg. 64-3=61, 61-3=58, etc Word association A: relax, left movement, cube rotation B: relax, left movement, right movement No previous BCI experience or training.
14 Training Methods 4 consecutive training sessions per day. ~5 mins/session, with 5-10min break between Subjects switched randomly between their 3 tasks every seconds. Online feedback through colored buttons on a computer screen => each button corresponds to a specific task. Statistical classifier optimized offline.
15 Training Methods After task training, subjects trained to the robot for 2 days. Results presented are after the second day. The BCI and subjects both adapted to eachother: training was not simply for the subject.
16 Statistical Methods
17 Gaussian Classifier State #1, #2, #3, or unknown. Input: EEG samples Output: Probability distribution for states
18 Equations that Do Something
19 Interface Mode I BCI responds every 0.5 seconds. Mode I: Computes probability for each class. Averages over 8 consecutive samples. Estimates probability using Bayes' formula. Compares final probability with a threshold of Errors <5%, unknown <30%. Theoretical bandwidth: 1 bit/s.
20 Interface Mode II Similar to Mode I. Requires two consecutive 0.5 s periods w/the same classification. Errors <2%, unknown <40%. Theoretical bandwidth: 1bit/s.
21 Robot and World Setup
22 The Task Drive the robot through different rooms in a house-like environment. The robot is similar to a miniature wheelchair. As only 3 commands are available to the users, it is necessary to interpret them as high-level instructions rather than low-level motor commands.
23 The Robot Two wheeled vehicle: modelling a wheel chair. 8 infrared sensors spread out around 360 degrees. Multilayer perceptron to map sensors into state. 3 feedback lights on robot (same as training): Green => mental command #1 Blue => mental command #2 Red => mental command #3
24 The Commands High level instructions, dependent on the robot state. The robot transitions between states based on both BCI and sensor input => behavior based controller. Generalized input commands: #1: Move forward. #2: Turn left / follow left wall. #3: Turn right / follow right wall.
25 BCI Interface High level commands can be received at any time. Robot continues executing command until another is received. Infrared sensors and built-in logic take care of low-level issues such as speed, turning radius, etc. BCI strictly used for communicating what, not how.
26 Finite State Automaton State changes based on sensor and BCI input. Commands relative to current state: In an open space, left and right mean turn left and right. In a confined space, left and right mean follow left/right wall until opening, and turn into room. Forward signifies moving forward and not turning when an opening appears. Stop for obstacles. Visual colored light feedback allows users to correct state before action if misinterpreted.
27
28 Results
29 Mode I Training Results Subject A 5 days of initial training Subject B 3 days of initial training Satisfactory performance: >60% correct, <5% errors
30 Mode II Task: Visit 3 different randomly chosen rooms. ~10 minutes continuous usage 100% success, in order Failure when BCI was too slow (missed a door etc) Correctable by user
31
32 Quantitative Results New experiment used a different room layout. Subjects first drove under mental control, and then manual control. Results compared: average only 35% longer for brain control.
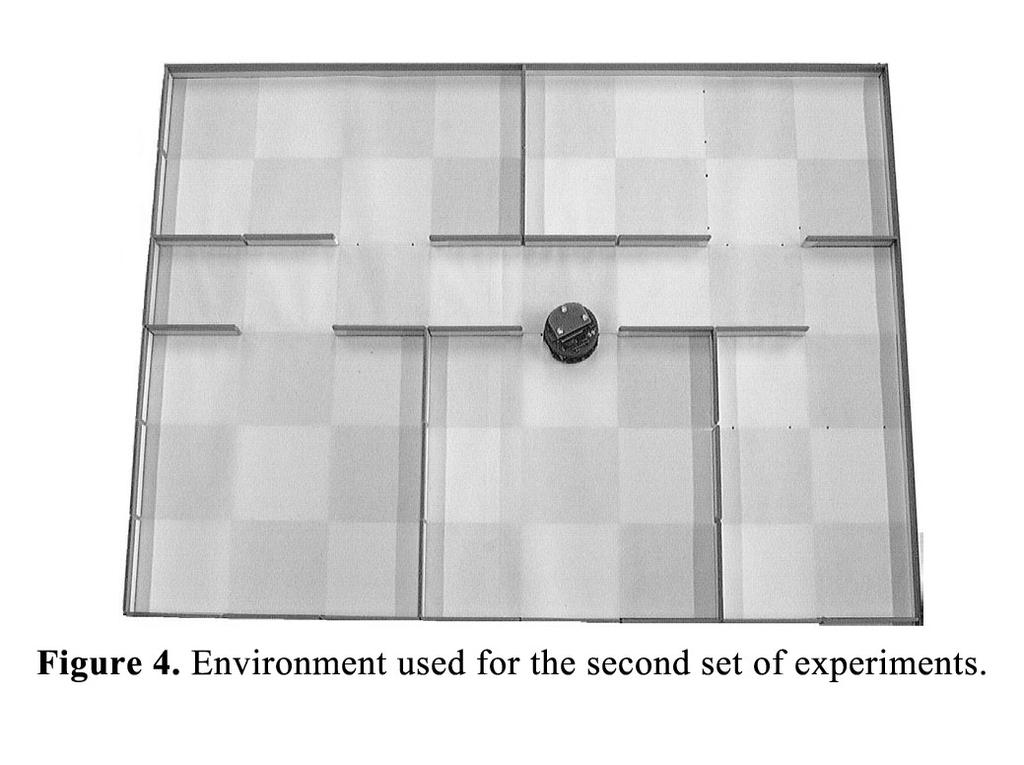
33
34 Conclusion
35 EEG for Robotic Control Much lower quality and resolution than implantable electrodes. Still sufficient to operate a robot with the appropriate constraints and goals. This is possible because of the combination of: Advanced robotics An asynchronous protocol Machine learning techniques.
36 Extending into the Real World Not quite feasible for a real-world wheel chair: Movement would effect BCI readings. The real world has many more obstacles and would require finer control.
37 Future Research [Michel et al 2001] suggests that it is possible to extract a larger number of mental states, specifically enough to more fully control robotic and prosthetic devices. Larger numbers of electrodes would be used. Scalp potentials => brain maps => activity in small areas. Use activity in distinct parts of the brain map as opposed to overall EEG features.
Non-Invasive Brain-Actuated Control of a Mobile Robot
 Non-Invasive Brain-Actuated Control of a Mobile Robot Jose del R. Millan 1 ' 2, Frederic Renkens 2, Josep Mourino 3, Wulfram Gerstner 2 1 Dalle Molle Institute for Perceptual Artificial Intelligence (IDIAP)
Non-Invasive Brain-Actuated Control of a Mobile Robot Jose del R. Millan 1 ' 2, Frederic Renkens 2, Josep Mourino 3, Wulfram Gerstner 2 1 Dalle Molle Institute for Perceptual Artificial Intelligence (IDIAP)
THE idea of moving robots or prosthetic devices not by
 1026 IEEE TRANSACTIONS ON BIOMEDICAL ENGINEERING, VOL. 51, NO. 6, JUNE 2004 Noninvasive Brain-Actuated Control of a Mobile Robot by Human EEG José del R. Millán*, Frédéric Renkens, Josep Mouriño, Student
1026 IEEE TRANSACTIONS ON BIOMEDICAL ENGINEERING, VOL. 51, NO. 6, JUNE 2004 Noninvasive Brain-Actuated Control of a Mobile Robot by Human EEG José del R. Millán*, Frédéric Renkens, Josep Mouriño, Student
Motor Imagery based Brain Computer Interface (BCI) using Artificial Neural Network Classifiers
 using Artificial Neural Network Classifiers") Motor Imagery based Brain Computer Interface (BCI) using Artificial Neural Network Classifiers Maitreyee Wairagkar Brain Embodiment Lab, School of Systems Engineering, University of Reading, Reading, U.K.
Motor Imagery based Brain Computer Interface (BCI) using Artificial Neural Network Classifiers Maitreyee Wairagkar Brain Embodiment Lab, School of Systems Engineering, University of Reading, Reading, U.K.
Non Invasive Brain Computer Interface for Movement Control
 Non Invasive Brain Computer Interface for Movement Control V.Venkatasubramanian 1, R. Karthik Balaji 2 Abstract: - There are alternate methods that ease the movement of wheelchairs such as voice control,
Non Invasive Brain Computer Interface for Movement Control V.Venkatasubramanian 1, R. Karthik Balaji 2 Abstract: - There are alternate methods that ease the movement of wheelchairs such as voice control,
Controlling Robots with Non-Invasive Brain-Computer Interfaces
 1 / 11 Controlling Robots with Non-Invasive Brain-Computer Interfaces Elliott Forney Colorado State University Brain-Computer Interfaces Group February 21, 2013 Brain-Computer Interfaces 2 / 11 Brain-Computer
1 / 11 Controlling Robots with Non-Invasive Brain-Computer Interfaces Elliott Forney Colorado State University Brain-Computer Interfaces Group February 21, 2013 Brain-Computer Interfaces 2 / 11 Brain-Computer
Off-line EEG analysis of BCI experiments with MATLAB V1.07a. Copyright g.tec medical engineering GmbH
 g.tec medical engineering GmbH Sierningstrasse 14, A-4521 Schiedlberg Austria - Europe Tel.: (43)-7251-22240-0 Fax: (43)-7251-22240-39 office@gtec.at, http://www.gtec.at Off-line EEG analysis of BCI experiments
g.tec medical engineering GmbH Sierningstrasse 14, A-4521 Schiedlberg Austria - Europe Tel.: (43)-7251-22240-0 Fax: (43)-7251-22240-39 office@gtec.at, http://www.gtec.at Off-line EEG analysis of BCI experiments
Presented by: V.Lakshana Regd. No.: Information Technology CET, Bhubaneswar
 BRAIN COMPUTER INTERFACE Presented by: V.Lakshana Regd. No.: 0601106040 Information Technology CET, Bhubaneswar Brain Computer Interface from fiction to reality... In the futuristic vision of the Wachowski
BRAIN COMPUTER INTERFACE Presented by: V.Lakshana Regd. No.: 0601106040 Information Technology CET, Bhubaneswar Brain Computer Interface from fiction to reality... In the futuristic vision of the Wachowski
OVER the past couple of decades, there have been numerous. Toward Brain-Actuated Humanoid Robots: Asynchronous Direct Control Using an EEG-Based BCI
 IEEE TRANSACTIONS ON ROBOTICS 1 Toward Brain-Actuated Humanoid Robots: Asynchronous Direct Control Using an EEG-Based BCI Yongwook Chae, Jaeseung Jeong, Member, IEEE, and Sungho Jo, Member, IEEE Abstract
IEEE TRANSACTIONS ON ROBOTICS 1 Toward Brain-Actuated Humanoid Robots: Asynchronous Direct Control Using an EEG-Based BCI Yongwook Chae, Jaeseung Jeong, Member, IEEE, and Sungho Jo, Member, IEEE Abstract
Brain Computer Interface Control of a Virtual Robotic System based on SSVEP and EEG Signal
 Brain Computer Interface Control of a Virtual Robotic based on SSVEP and EEG Signal By: Fatemeh Akrami Supervisor: Dr. Hamid D. Taghirad October 2017 Contents 1/20 Brain Computer Interface (BCI) A direct
Brain Computer Interface Control of a Virtual Robotic based on SSVEP and EEG Signal By: Fatemeh Akrami Supervisor: Dr. Hamid D. Taghirad October 2017 Contents 1/20 Brain Computer Interface (BCI) A direct
Brain-Computer Interfaces for Interaction and Control José del R. Millán
 Brain-Computer Interfaces for Interaction and Control José del R. Millán Defitech Professor of Non-Invasive Brain-Machine Interface Center for Neuroprosthetics Institute of Bioengineering, School of Engineering
Brain-Computer Interfaces for Interaction and Control José del R. Millán Defitech Professor of Non-Invasive Brain-Machine Interface Center for Neuroprosthetics Institute of Bioengineering, School of Engineering
Brain Computer Interfaces for Full Body Movement and Embodiment. Intelligent Robotics Seminar Kai Brusch
 Brain Computer Interfaces for Full Body Movement and Embodiment Intelligent Robotics Seminar 21.11.2016 Kai Brusch 1 Brain Computer Interfaces for Full Body Movement and Embodiment Intelligent Robotics
Brain Computer Interfaces for Full Body Movement and Embodiment Intelligent Robotics Seminar 21.11.2016 Kai Brusch 1 Brain Computer Interfaces for Full Body Movement and Embodiment Intelligent Robotics
Mobile robot control based on noninvasive brain-computer interface using hierarchical classifier of imagined motor commands
 Mobile robot control based on noninvasive brain-computer interface using hierarchical classifier of imagined motor commands Filipp Gundelakh 1, Lev Stankevich 1, * and Konstantin Sonkin 2 1 Peter the Great
Mobile robot control based on noninvasive brain-computer interface using hierarchical classifier of imagined motor commands Filipp Gundelakh 1, Lev Stankevich 1, * and Konstantin Sonkin 2 1 Peter the Great
Biometric: EEG brainwaves
 Biometric: EEG brainwaves Jeovane Honório Alves 1 1 Department of Computer Science Federal University of Parana Curitiba December 5, 2016 Jeovane Honório Alves (UFPR) Biometric: EEG brainwaves Curitiba
Biometric: EEG brainwaves Jeovane Honório Alves 1 1 Department of Computer Science Federal University of Parana Curitiba December 5, 2016 Jeovane Honório Alves (UFPR) Biometric: EEG brainwaves Curitiba
Design and Implementation of Brain Computer Interface Based Robot Motion Control
 Design and Implementation of Brain Computer Interface Based Robot Motion Control Devashree Tripathy 1,2 and Jagdish Lal Raheja 1 1 Advanced Electronics Systems Group, CSIR - Central Electronics Engineering
Design and Implementation of Brain Computer Interface Based Robot Motion Control Devashree Tripathy 1,2 and Jagdish Lal Raheja 1 1 Advanced Electronics Systems Group, CSIR - Central Electronics Engineering
A Two-class Self-Paced BCI to Control a Robot in Four Directions
 2011 IEEE International Conference on Rehabilitation Robotics Rehab Week Zurich, ETH Zurich Science City, Switzerland, June 29 - July 1, 2011 A Two-class Self-Paced BCI to Control a Robot in Four Directions
2011 IEEE International Conference on Rehabilitation Robotics Rehab Week Zurich, ETH Zurich Science City, Switzerland, June 29 - July 1, 2011 A Two-class Self-Paced BCI to Control a Robot in Four Directions
Brain-Computer Interface for Control and Communication with Smart Mobile Applications
 University of Telecommunications and Post Sofia, Bulgaria Brain-Computer Interface for Control and Communication with Smart Mobile Applications Prof. Svetla Radeva, DSc, PhD HUMAN - COMPUTER INTERACTION
University of Telecommunications and Post Sofia, Bulgaria Brain-Computer Interface for Control and Communication with Smart Mobile Applications Prof. Svetla Radeva, DSc, PhD HUMAN - COMPUTER INTERACTION
Metrics for Assistive Robotics Brain-Computer Interface Evaluation
 Metrics for Assistive Robotics Brain-Computer Interface Evaluation Martin F. Stoelen, Javier Jiménez, Alberto Jardón, Juan G. Víctores José Manuel Sánchez Pena, Carlos Balaguer Universidad Carlos III de
Metrics for Assistive Robotics Brain-Computer Interface Evaluation Martin F. Stoelen, Javier Jiménez, Alberto Jardón, Juan G. Víctores José Manuel Sánchez Pena, Carlos Balaguer Universidad Carlos III de
Classification of Four Class Motor Imagery and Hand Movements for Brain Computer Interface
 Classification of Four Class Motor Imagery and Hand Movements for Brain Computer Interface 1 N.Gowri Priya, 2 S.Anu Priya, 3 V.Dhivya, 4 M.D.Ranjitha, 5 P.Sudev 1 Assistant Professor, 2,3,4,5 Students
Classification of Four Class Motor Imagery and Hand Movements for Brain Computer Interface 1 N.Gowri Priya, 2 S.Anu Priya, 3 V.Dhivya, 4 M.D.Ranjitha, 5 P.Sudev 1 Assistant Professor, 2,3,4,5 Students
Brain-Controlled Telepresence Robot By Motor-Disabled People
 Brain-Controlled Telepresence Robot By Motor-Disabled People T.Shanmugapriya 1, S.Senthilkumar 2 Assistant Professor, Department of Information Technology, SSN Engg college 1, Chennai, Tamil Nadu, India
Brain-Controlled Telepresence Robot By Motor-Disabled People T.Shanmugapriya 1, S.Senthilkumar 2 Assistant Professor, Department of Information Technology, SSN Engg college 1, Chennai, Tamil Nadu, India
BRAINWAVE RECOGNITION
 College of Engineering, Design and Physical Sciences Electronic & Computer Engineering BEng/BSc Project Report BRAINWAVE RECOGNITION Page 1 of 59 Method EEG MEG PET FMRI Time resolution The spatial resolution
College of Engineering, Design and Physical Sciences Electronic & Computer Engineering BEng/BSc Project Report BRAINWAVE RECOGNITION Page 1 of 59 Method EEG MEG PET FMRI Time resolution The spatial resolution
BRAIN CONTROLLED CAR FOR DISABLED USING ARTIFICIAL INTELLIGENCE
 BRAIN CONTROLLED CAR FOR DISABLED USING ARTIFICIAL INTELLIGENCE Presented by V.DIVYA SRI M.V.LAKSHMI III CSE III CSE EMAIL: vds555@gmail.com EMAIL: morampudi.lakshmi@gmail.com Phone No. 9949422146 Of SHRI
BRAIN CONTROLLED CAR FOR DISABLED USING ARTIFICIAL INTELLIGENCE Presented by V.DIVYA SRI M.V.LAKSHMI III CSE III CSE EMAIL: vds555@gmail.com EMAIL: morampudi.lakshmi@gmail.com Phone No. 9949422146 Of SHRI
Mindwave Device Wheelchair Control
 Mindwave Device Wheelchair Control Priyanka D. Girase 1, M. P. Deshmukh 2 1 ME-II nd (Digital Electronics), S.S.B.T s C.O.E.T. Bambhori, Jalgaon 2 Professor, Electronics and Telecommunication Department,
Mindwave Device Wheelchair Control Priyanka D. Girase 1, M. P. Deshmukh 2 1 ME-II nd (Digital Electronics), S.S.B.T s C.O.E.T. Bambhori, Jalgaon 2 Professor, Electronics and Telecommunication Department,
Classifying the Brain's Motor Activity via Deep Learning
 Final Report Classifying the Brain's Motor Activity via Deep Learning Tania Morimoto & Sean Sketch Motivation Over 50 million Americans suffer from mobility or dexterity impairments. Over the past few
Final Report Classifying the Brain's Motor Activity via Deep Learning Tania Morimoto & Sean Sketch Motivation Over 50 million Americans suffer from mobility or dexterity impairments. Over the past few
EE 791 EEG-5 Measures of EEG Dynamic Properties
 EE 791 EEG-5 Measures of EEG Dynamic Properties Computer analysis of EEG EEG scientists must be especially wary of mathematics in search of applications after all the number of ways to transform data is
EE 791 EEG-5 Measures of EEG Dynamic Properties Computer analysis of EEG EEG scientists must be especially wary of mathematics in search of applications after all the number of ways to transform data is
A Cross-Platform Smartphone Brain Scanner
 Downloaded from orbit.dtu.dk on: Nov 28, 2018 A Cross-Platform Smartphone Brain Scanner Larsen, Jakob Eg; Stopczynski, Arkadiusz; Stahlhut, Carsten; Petersen, Michael Kai; Hansen, Lars Kai Publication
Downloaded from orbit.dtu.dk on: Nov 28, 2018 A Cross-Platform Smartphone Brain Scanner Larsen, Jakob Eg; Stopczynski, Arkadiusz; Stahlhut, Carsten; Petersen, Michael Kai; Hansen, Lars Kai Publication
BCI-based Electric Cars Controlling System
 nications for smart grid. Renewable and Sustainable Energy Reviews, 41, p.p.248-260. 7. Ian J. Dilworth (2007) Bluetooth. The Cable and Telecommunications Professionals' Reference (Third Edition) PSTN,
nications for smart grid. Renewable and Sustainable Energy Reviews, 41, p.p.248-260. 7. Ian J. Dilworth (2007) Bluetooth. The Cable and Telecommunications Professionals' Reference (Third Edition) PSTN,
Automatic Electrical Home Appliance Control and Security for disabled using electroencephalogram based brain-computer interfacing
 Automatic Electrical Home Appliance Control and Security for disabled using electroencephalogram based brain-computer interfacing S. Paul, T. Sultana, M. Tahmid Electrical & Electronic Engineering, Electrical
Automatic Electrical Home Appliance Control and Security for disabled using electroencephalogram based brain-computer interfacing S. Paul, T. Sultana, M. Tahmid Electrical & Electronic Engineering, Electrical
BRAIN CONTROLLED CAR FOR DISABLED USING ARTIFICIAL INTELLIGENCE
 BRAIN CONTROLLED CAR FOR DISABLED USING ARTIFICIAL INTELLIGENCE 1. ABSTRACT This paper considers the development of a brain driven car, which would be of great help to the physically disabled people. Since
BRAIN CONTROLLED CAR FOR DISABLED USING ARTIFICIAL INTELLIGENCE 1. ABSTRACT This paper considers the development of a brain driven car, which would be of great help to the physically disabled people. Since
Beyond Blind Averaging Analyzing Event-Related Brain Dynamics
 Beyond Blind Averaging Analyzing Event-Related Brain Dynamics Scott Makeig Swartz Center for Computational Neuroscience Institute for Neural Computation University of California San Diego La Jolla, CA
Beyond Blind Averaging Analyzing Event-Related Brain Dynamics Scott Makeig Swartz Center for Computational Neuroscience Institute for Neural Computation University of California San Diego La Jolla, CA
Self-Paced Brain-Computer Interaction with Virtual Worlds: A Quantitative and Qualitative Study Out of the Lab
 Self-Paced Brain-Computer Interaction with Virtual Worlds: A Quantitative and Qualitative Study Out of the Lab F. Lotte 1,2,3, Y. Renard 1,3, A. Lécuyer 1,3 1 Research Institute for Computer Science and
Self-Paced Brain-Computer Interaction with Virtual Worlds: A Quantitative and Qualitative Study Out of the Lab F. Lotte 1,2,3, Y. Renard 1,3, A. Lécuyer 1,3 1 Research Institute for Computer Science and
A Comparison of Signal Processing and Classification Methods for Brain-Computer Interface
 A Comparison of Signal Processing and Classification Methods for Brain-Computer Interface by Mark Renfrew Submitted in partial fulfillment of the requirements for the degree of Master of Science Thesis
A Comparison of Signal Processing and Classification Methods for Brain-Computer Interface by Mark Renfrew Submitted in partial fulfillment of the requirements for the degree of Master of Science Thesis
A SEMINAR REPORT ON BRAIN CONTROLLED CAR USING ARTIFICIAL INTELLIGENCE
 A SEMINAR REPORT ON BRAIN CONTROLLED CAR USING ARTIFICIAL INTELLIGENCE Submitted to Jawaharlal Nehru Technological University for the partial Fulfillments of the requirement for the Award of the degree
A SEMINAR REPORT ON BRAIN CONTROLLED CAR USING ARTIFICIAL INTELLIGENCE Submitted to Jawaharlal Nehru Technological University for the partial Fulfillments of the requirement for the Award of the degree
Universitatea Politehnica din Bucureşti Facultatea de Automatică şi Calculatoare Departamentul de Automatică şi Ingineria Sistemelor
 Universitatea Politehnica din Bucureşti Facultatea de Automatică şi Calculatoare Departamentul de Automatică şi Ingineria Sistemelor LUCRARE DE LICENŢĂ Interfaţă Creier-Calculator (Brain-Computer Interface)
Universitatea Politehnica din Bucureşti Facultatea de Automatică şi Calculatoare Departamentul de Automatică şi Ingineria Sistemelor LUCRARE DE LICENŢĂ Interfaţă Creier-Calculator (Brain-Computer Interface)
An Exploration of the Utilization of Electroencephalography and Neural Nets to Control Robots
 An Exploration of the Utilization of Electroencephalography and Neural Nets to Control Robots Dan Szafir 1 and Robert Signorile 2 Computer Science Department Boston College Chestnut Hill, MA USA szafird@bc.edu
An Exploration of the Utilization of Electroencephalography and Neural Nets to Control Robots Dan Szafir 1 and Robert Signorile 2 Computer Science Department Boston College Chestnut Hill, MA USA szafird@bc.edu
Activation of a Mobile Robot through a Brain Computer Interface
 2010 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 2010, Anchorage, Alaska, USA Activation of a Mobile Robot through a Brain Computer Interface Alexandre
2010 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 2010, Anchorage, Alaska, USA Activation of a Mobile Robot through a Brain Computer Interface Alexandre
EasyChair Preprint. A Tactile P300 Brain-Computer Interface: Principle and Paradigm
 EasyChair Preprint 117 A Tactile P300 Brain-Computer Interface: Principle and Paradigm Aness Belhaouari, Abdelkader Nasreddine Belkacem and Nasreddine Berrached EasyChair preprints are intended for rapid
EasyChair Preprint 117 A Tactile P300 Brain-Computer Interface: Principle and Paradigm Aness Belhaouari, Abdelkader Nasreddine Belkacem and Nasreddine Berrached EasyChair preprints are intended for rapid
BCI THE NEW CLASS OF BIOENGINEERING
 BCI THE NEW CLASS OF BIOENGINEERING By Krupali Bhatvedekar ABSTRACT A brain-computer interface (BCI), which is sometimes called a direct neural interface or a brainmachine interface, is a device that provides
BCI THE NEW CLASS OF BIOENGINEERING By Krupali Bhatvedekar ABSTRACT A brain-computer interface (BCI), which is sometimes called a direct neural interface or a brainmachine interface, is a device that provides
Real Robots Controlled by Brain Signals - A BMI Approach
 International Journal of Advanced Intelligence Volume 2, Number 1, pp.25-35, July, 2010. c AIA International Advanced Information Institute Real Robots Controlled by Brain Signals - A BMI Approach Genci
International Journal of Advanced Intelligence Volume 2, Number 1, pp.25-35, July, 2010. c AIA International Advanced Information Institute Real Robots Controlled by Brain Signals - A BMI Approach Genci
Research Article Towards Development of a 3-State Self-Paced Brain-Computer Interface
 Computational Intelligence and Neuroscience Volume 2007, Article ID 84386, 8 pages doi:10.1155/2007/84386 Research Article Towards Development of a 3-State Self-Paced Brain-Computer Interface Ali Bashashati,
Computational Intelligence and Neuroscience Volume 2007, Article ID 84386, 8 pages doi:10.1155/2007/84386 Research Article Towards Development of a 3-State Self-Paced Brain-Computer Interface Ali Bashashati,
Decoding Brainwave Data using Regression
 Decoding Brainwave Data using Regression Justin Kilmarx: The University of Tennessee, Knoxville David Saffo: Loyola University Chicago Lucien Ng: The Chinese University of Hong Kong Mentor: Dr. Xiaopeng
Decoding Brainwave Data using Regression Justin Kilmarx: The University of Tennessee, Knoxville David Saffo: Loyola University Chicago Lucien Ng: The Chinese University of Hong Kong Mentor: Dr. Xiaopeng
Voice Assisting System Using Brain Control Interface
 I J C T A, 9(5), 2016, pp. 257-263 International Science Press Voice Assisting System Using Brain Control Interface Adeline Rite Alex 1 and S. Suresh Kumar 2 ABSTRACT This paper discusses the properties
I J C T A, 9(5), 2016, pp. 257-263 International Science Press Voice Assisting System Using Brain Control Interface Adeline Rite Alex 1 and S. Suresh Kumar 2 ABSTRACT This paper discusses the properties
Behaviour Patterns Evolution on Individual and Group Level. Stanislav Slušný, Roman Neruda, Petra Vidnerová. CIMMACS 07, December 14, Tenerife
 Behaviour Patterns Evolution on Individual and Group Level Stanislav Slušný, Roman Neruda, Petra Vidnerová Department of Theoretical Computer Science Institute of Computer Science Academy of Science of
Behaviour Patterns Evolution on Individual and Group Level Stanislav Slušný, Roman Neruda, Petra Vidnerová Department of Theoretical Computer Science Institute of Computer Science Academy of Science of
Removal of Line Noise Component from EEG Signal
 1 Removal of Line Noise Component from EEG Signal Removal of Line Noise Component from EEG Signal When carrying out time-frequency analysis, if one is interested in analysing frequencies above 30Hz (i.e.
1 Removal of Line Noise Component from EEG Signal Removal of Line Noise Component from EEG Signal When carrying out time-frequency analysis, if one is interested in analysing frequencies above 30Hz (i.e.
Training of EEG Signal Intensification for BCI System. Haesung Jeong*, Hyungi Jeong*, Kong Borasy*, Kyu-Sung Kim***, Sangmin Lee**, Jangwoo Kwon*
 Training of EEG Signal Intensification for BCI System Haesung Jeong*, Hyungi Jeong*, Kong Borasy*, Kyu-Sung Kim***, Sangmin Lee**, Jangwoo Kwon* Department of Computer Engineering, Inha University, Korea*
Training of EEG Signal Intensification for BCI System Haesung Jeong*, Hyungi Jeong*, Kong Borasy*, Kyu-Sung Kim***, Sangmin Lee**, Jangwoo Kwon* Department of Computer Engineering, Inha University, Korea*
Micro-state analysis of EEG
 Micro-state analysis of EEG Gilles Pourtois Psychopathology & Affective Neuroscience (PAN) Lab http://www.pan.ugent.be Stewart & Walsh, 2000 A shared opinion on EEG/ERP: excellent temporal resolution (ms
Micro-state analysis of EEG Gilles Pourtois Psychopathology & Affective Neuroscience (PAN) Lab http://www.pan.ugent.be Stewart & Walsh, 2000 A shared opinion on EEG/ERP: excellent temporal resolution (ms
Brain Computer Interface for Home Automation to help Patients with Alzheimer s Disease
 Brain Computer Interface for Home Automation to help Patients with Alzheimer s Disease Ahalya Mary J 1, Parthsarthy Nandi 2, Ketan Nagpure 3, Rishav Roy 4, Bhagwan Kishore Kumar 5 1 Assistant Professor
Brain Computer Interface for Home Automation to help Patients with Alzheimer s Disease Ahalya Mary J 1, Parthsarthy Nandi 2, Ketan Nagpure 3, Rishav Roy 4, Bhagwan Kishore Kumar 5 1 Assistant Professor
FEATURES EXTRACTION TECHNIQES OF EEG SIGNAL FOR BCI APPLICATIONS
 FEATURES EXTRACTION TECHNIQES OF EEG SIGNAL FOR BCI APPLICATIONS ABDUL-BARY RAOUF SULEIMAN, TOKA ABDUL-HAMEED FATEHI Computer and Information Engineering Department College Of Electronics Engineering,
FEATURES EXTRACTION TECHNIQES OF EEG SIGNAL FOR BCI APPLICATIONS ABDUL-BARY RAOUF SULEIMAN, TOKA ABDUL-HAMEED FATEHI Computer and Information Engineering Department College Of Electronics Engineering,
BRAIN COMPUTER INTERFACE (BCI) RESEARCH CENTER AT SRM UNIVERSITY
 RESEARCH CENTER AT SRM UNIVERSITY") BRAIN COMPUTER INTERFACE (BCI) RESEARCH CENTER AT SRM UNIVERSITY INTRODUCTION TO BCI Brain Computer Interfacing has been one of the growing fields of research and development in recent years. An Electroencephalograph
BRAIN COMPUTER INTERFACE (BCI) RESEARCH CENTER AT SRM UNIVERSITY INTRODUCTION TO BCI Brain Computer Interfacing has been one of the growing fields of research and development in recent years. An Electroencephalograph
Analysis and simulation of EEG Brain Signal Data using MATLAB
 Chapter 4 Analysis and simulation of EEG Brain Signal Data using MATLAB 4.1 INTRODUCTION Electroencephalogram (EEG) remains a brain signal processing technique that let gaining the appreciative of the
Chapter 4 Analysis and simulation of EEG Brain Signal Data using MATLAB 4.1 INTRODUCTION Electroencephalogram (EEG) remains a brain signal processing technique that let gaining the appreciative of the
Implementation of Mind Control Robot
 Implementation of Mind Control Robot Adeel Butt and Milutin Stanaćević Department of Electrical and Computer Engineering Stony Brook University Stony Brook, New York, USA adeel.butt@stonybrook.edu, milutin.stanacevic@stonybrook.edu
Implementation of Mind Control Robot Adeel Butt and Milutin Stanaćević Department of Electrical and Computer Engineering Stony Brook University Stony Brook, New York, USA adeel.butt@stonybrook.edu, milutin.stanacevic@stonybrook.edu
Brain Machine Interface for Wrist Movement Using Robotic Arm
 Brain Machine Interface for Wrist Movement Using Robotic Arm Sidhika Varshney *, Bhoomika Gaur *, Omar Farooq*, Yusuf Uzzaman Khan ** * Department of Electronics Engineering, Zakir Hussain College of Engineering
Brain Machine Interface for Wrist Movement Using Robotic Arm Sidhika Varshney *, Bhoomika Gaur *, Omar Farooq*, Yusuf Uzzaman Khan ** * Department of Electronics Engineering, Zakir Hussain College of Engineering
BRAIN COMPUTER INTERFACES FOR MEDICAL APPLICATIONS
 Bulletin of the Transilvania University of Braşov Vol. 3 (52) - 2010 Series I: Engineering Sciences BRAIN COMPUTER INTERFACES FOR MEDICAL APPLICATIONS C.C. POSTELNICU 1 D. TALABĂ 1 M.I. TOMA 1 Abstract:
Bulletin of the Transilvania University of Braşov Vol. 3 (52) - 2010 Series I: Engineering Sciences BRAIN COMPUTER INTERFACES FOR MEDICAL APPLICATIONS C.C. POSTELNICU 1 D. TALABĂ 1 M.I. TOMA 1 Abstract:
Brain-Machine Interface for Neural Prosthesis:
 Brain-Machine Interface for Neural Prosthesis: Nitish V. Thakor, Ph.D. Professor, Biomedical Engineering Joint Appointments: Electrical & Computer Eng, Materials Science & Eng, Mechanical Eng Neuroengineering
Brain-Machine Interface for Neural Prosthesis: Nitish V. Thakor, Ph.D. Professor, Biomedical Engineering Joint Appointments: Electrical & Computer Eng, Materials Science & Eng, Mechanical Eng Neuroengineering
Smart Phone Accelerometer Sensor Based Wireless Robot for Physically Disabled People
 Middle-East Journal of Scientific Research 23 (Sensing, Signal Processing and Security): 141-147, 2015 ISSN 1990-9233 IDOSI Publications, 2015 DOI: 10.5829/idosi.mejsr.2015.23.ssps.36 Smart Phone Accelerometer
Middle-East Journal of Scientific Research 23 (Sensing, Signal Processing and Security): 141-147, 2015 ISSN 1990-9233 IDOSI Publications, 2015 DOI: 10.5829/idosi.mejsr.2015.23.ssps.36 Smart Phone Accelerometer
Modeling, Architectures and Signal Processing for Brain Computer Interfaces
 Modeling, Architectures and Signal Processing for Brain Computer Interfaces Jose C. Principe, Ph.D. Distinguished Professor of ECE/BME University of Florida principe@cnel.ufl.edu www.cnel.ufl.edu US versus
Modeling, Architectures and Signal Processing for Brain Computer Interfaces Jose C. Principe, Ph.D. Distinguished Professor of ECE/BME University of Florida principe@cnel.ufl.edu www.cnel.ufl.edu US versus
1. INTRODUCTION: 2. EOG: system, handicapped people, wheelchair.
 ABSTRACT This paper presents a new method to control and guide mobile robots. In this case, to send different commands we have used electrooculography (EOG) techniques, so that, control is made by means
ABSTRACT This paper presents a new method to control and guide mobile robots. In this case, to send different commands we have used electrooculography (EOG) techniques, so that, control is made by means
Brain Computer Interfaces Lecture 2: Current State of the Art in BCIs
 Brain Computer Interfaces Lecture 2: Current State of the Art in BCIs Lars Schwabe Adaptive and Regenerative Software Systems http://ars.informatik.uni-rostock.de 2011 UNIVERSITÄT ROSTOCK FACULTY OF COMPUTER
Brain Computer Interfaces Lecture 2: Current State of the Art in BCIs Lars Schwabe Adaptive and Regenerative Software Systems http://ars.informatik.uni-rostock.de 2011 UNIVERSITÄT ROSTOCK FACULTY OF COMPUTER
BRAIN MACHINE INTERFACE SYSTEM FOR PERSON WITH QUADRIPLEGIA DISEASE
 BRAIN MACHINE INTERFACE SYSTEM FOR PERSON WITH QUADRIPLEGIA DISEASE Sameer Taksande Department of Computer Science G.H. Raisoni College of Engineering Nagpur University, Nagpur, Maharashtra India D.V.
BRAIN MACHINE INTERFACE SYSTEM FOR PERSON WITH QUADRIPLEGIA DISEASE Sameer Taksande Department of Computer Science G.H. Raisoni College of Engineering Nagpur University, Nagpur, Maharashtra India D.V.
Asynchronous BCI Control of a Robot Simulator with Supervised Online Training
 Asynchronous BCI Control of a Robot Simulator with Supervised Online Training Chun Sing Louis Tsui and John Q. Gan BCI Group, Department of Computer Science, University of Essex, Colchester, CO4 3SQ, United
Asynchronous BCI Control of a Robot Simulator with Supervised Online Training Chun Sing Louis Tsui and John Q. Gan BCI Group, Department of Computer Science, University of Essex, Colchester, CO4 3SQ, United
A Brain-Controlled Wheelchair Based on P300 and Path Guidance
 A Brain-Controlled Wheelchair Based on P300 and Path Guidance Brice Rebsamen 1, Etienne Burdet 2,1, Cuntai Guan 3, Haihong Zhang 3, Chee Leong Teo 1, Qiang Zeng 1, Marcelo Ang 1 and Christian Laugier 4
A Brain-Controlled Wheelchair Based on P300 and Path Guidance Brice Rebsamen 1, Etienne Burdet 2,1, Cuntai Guan 3, Haihong Zhang 3, Chee Leong Teo 1, Qiang Zeng 1, Marcelo Ang 1 and Christian Laugier 4
ISSN: [Folane* et al., 6(3): March, 2017] Impact Factor: 4.116
![ISSN: [Folane* et al., 6(3): March, 2017] Impact Factor: 4.116](/thumbs/89/100951598.jpg "ISSN: [Folane* et al., 6(3): March, 2017] Impact Factor: 4.116") IJESRT INTERNATIONAL JOURNAL OF ENGINEERING SCIENCES & RESEARCH TECHNOLOGY BRAIN COMPUTER INTERFACE BASED WHEELCHAIR: A ROBOTIC ARCHITECTURE Nikhil R Folane *, Laxmikant K Shevada, Abhijeet A Chavan, Kiran
IJESRT INTERNATIONAL JOURNAL OF ENGINEERING SCIENCES & RESEARCH TECHNOLOGY BRAIN COMPUTER INTERFACE BASED WHEELCHAIR: A ROBOTIC ARCHITECTURE Nikhil R Folane *, Laxmikant K Shevada, Abhijeet A Chavan, Kiran
A Brain-Computer Interface Based on Steady State Visual Evoked Potentials for Controlling a Robot
 A Brain-Computer Interface Based on Steady State Visual Evoked Potentials for Controlling a Robot Robert Prueckl 1, Christoph Guger 1 1 g.tec, Guger Technologies OEG, Sierningstr. 14, 4521 Schiedlberg,
A Brain-Computer Interface Based on Steady State Visual Evoked Potentials for Controlling a Robot Robert Prueckl 1, Christoph Guger 1 1 g.tec, Guger Technologies OEG, Sierningstr. 14, 4521 Schiedlberg,
BCI for Comparing Eyes Activities Measured from Temporal and Occipital Lobes
 BCI for Comparing Eyes Activities Measured from Temporal and Occipital Lobes Sachin Kumar Agrawal, Annushree Bablani and Prakriti Trivedi Abstract Brain computer interface (BCI) is a system which communicates
BCI for Comparing Eyes Activities Measured from Temporal and Occipital Lobes Sachin Kumar Agrawal, Annushree Bablani and Prakriti Trivedi Abstract Brain computer interface (BCI) is a system which communicates
Training in realistic virtual environments:
 Training in realistic virtual environments: Impact on user performance in a motor imagery-based Brain-Computer Interface Leando da Silva-Sauer, Luis Valero- Aguayo, Francisco Velasco-Álvarez, Sergio Varona-Moya,
Training in realistic virtual environments: Impact on user performance in a motor imagery-based Brain-Computer Interface Leando da Silva-Sauer, Luis Valero- Aguayo, Francisco Velasco-Álvarez, Sergio Varona-Moya,
Analysis of brain waves according to their frequency
 Analysis of brain waves according to their frequency Z. Koudelková, M. Strmiska, R. Jašek Abstract The primary purpose of this article is to show and analyse the brain waves, which are activated during
Analysis of brain waves according to their frequency Z. Koudelková, M. Strmiska, R. Jašek Abstract The primary purpose of this article is to show and analyse the brain waves, which are activated during
EOG artifact removal from EEG using a RBF neural network
 EOG artifact removal from EEG using a RBF neural network Mohammad seifi mohamad_saifi@yahoo.com Ali akbar kargaran erdechi aliakbar.kargaran@gmail.com MS students, University of hakim Sabzevari, Sabzevar,
EOG artifact removal from EEG using a RBF neural network Mohammad seifi mohamad_saifi@yahoo.com Ali akbar kargaran erdechi aliakbar.kargaran@gmail.com MS students, University of hakim Sabzevari, Sabzevar,
ANIMA: Non-conventional Brain-Computer Interfaces in Robot Control through Electroencephalography and Electrooculography, ARP Module
 ANIMA: Non-conventional Brain-Computer Interfaces in Robot Control through Electroencephalography and Electrooculography, ARP Module Luis F. Reina, Gerardo Martínez, Mario Valdeavellano, Marie Destarac,
ANIMA: Non-conventional Brain-Computer Interfaces in Robot Control through Electroencephalography and Electrooculography, ARP Module Luis F. Reina, Gerardo Martínez, Mario Valdeavellano, Marie Destarac,
Noise Reduction on the Raw Signal of Emotiv EEG Neuroheadset
 Noise Reduction on the Raw Signal of Emotiv EEG Neuroheadset Raimond-Hendrik Tunnel Institute of Computer Science, University of Tartu Liivi 2 Tartu, Estonia jee7@ut.ee ABSTRACT In this paper, we describe
Noise Reduction on the Raw Signal of Emotiv EEG Neuroheadset Raimond-Hendrik Tunnel Institute of Computer Science, University of Tartu Liivi 2 Tartu, Estonia jee7@ut.ee ABSTRACT In this paper, we describe
Source Position from EEG Signal with Artificial Neural Network
 Original research article Source Position from EEG Signal with Artificial Neural Network Tanaporn Payommai* Department of electronics communication and Computer, Faculty of Industrial Technology, Valaya
Original research article Source Position from EEG Signal with Artificial Neural Network Tanaporn Payommai* Department of electronics communication and Computer, Faculty of Industrial Technology, Valaya
780. Biomedical signal identification and analysis
 780. Biomedical signal identification and analysis Agata Nawrocka 1, Andrzej Kot 2, Marcin Nawrocki 3 1, 2 Department of Process Control, AGH University of Science and Technology, Poland 3 Department of
780. Biomedical signal identification and analysis Agata Nawrocka 1, Andrzej Kot 2, Marcin Nawrocki 3 1, 2 Department of Process Control, AGH University of Science and Technology, Poland 3 Department of
Ensuring the Safety of an Autonomous Robot in Interaction with Children
 Machine Learning in Robot Assisted Therapy Ensuring the Safety of an Autonomous Robot in Interaction with Children Challenges and Considerations Stefan Walke stefan.walke@tum.de SS 2018 Overview Physical
Machine Learning in Robot Assisted Therapy Ensuring the Safety of an Autonomous Robot in Interaction with Children Challenges and Considerations Stefan Walke stefan.walke@tum.de SS 2018 Overview Physical
Electroencephalography (EEG)-based brain computer interfaces for rehabilitation
-based brain computer interfaces for rehabilitation") Virginia Commonwealth University VCU Scholars Compass Theses and Dissertations Graduate School 2012 Electroencephalography (EEG)-based brain computer interfaces for rehabilitation Dandan Huang Virginia
Virginia Commonwealth University VCU Scholars Compass Theses and Dissertations Graduate School 2012 Electroencephalography (EEG)-based brain computer interfaces for rehabilitation Dandan Huang Virginia
from signals to sources asa-lab turnkey solution for ERP research
 from signals to sources asa-lab turnkey solution for ERP research asa-lab : turnkey solution for ERP research Psychological research on the basis of event-related potentials is a key source of information
from signals to sources asa-lab turnkey solution for ERP research asa-lab : turnkey solution for ERP research Psychological research on the basis of event-related potentials is a key source of information
Non-Invasive EEG Based Wireless Brain Computer Interface for Safety Applications Using Embedded Systems
 Non-Invasive EEG Based Wireless Brain Computer Interface for Safety Applications Using Embedded Systems Uma.K.J 1, Mr. C. Santha Kumar 2 II-ME-Embedded System Technologies, KSR Institute for Engineering
Non-Invasive EEG Based Wireless Brain Computer Interface for Safety Applications Using Embedded Systems Uma.K.J 1, Mr. C. Santha Kumar 2 II-ME-Embedded System Technologies, KSR Institute for Engineering
ROBOT APPLICATION OF A BRAIN COMPUTER INTERFACE TO STAUBLI TX40 ROBOTS - EARLY STAGES NICHOLAS WAYTOWICH
 World Automation Congress 2010 TSl Press. ROBOT APPLICATION OF A BRAIN COMPUTER INTERFACE TO STAUBLI TX40 ROBOTS - EARLY STAGES NICHOLAS WAYTOWICH Undergraduate Research Assistant, Mechanical Engineering
World Automation Congress 2010 TSl Press. ROBOT APPLICATION OF A BRAIN COMPUTER INTERFACE TO STAUBLI TX40 ROBOTS - EARLY STAGES NICHOLAS WAYTOWICH Undergraduate Research Assistant, Mechanical Engineering
COGNITIVE MODEL OF MOBILE ROBOT WORKSPACE
 COGNITIVE MODEL OF MOBILE ROBOT WORKSPACE Prof.dr.sc. Mladen Crneković, University of Zagreb, FSB, I. Lučića 5, 10000 Zagreb Prof.dr.sc. Davor Zorc, University of Zagreb, FSB, I. Lučića 5, 10000 Zagreb
COGNITIVE MODEL OF MOBILE ROBOT WORKSPACE Prof.dr.sc. Mladen Crneković, University of Zagreb, FSB, I. Lučića 5, 10000 Zagreb Prof.dr.sc. Davor Zorc, University of Zagreb, FSB, I. Lučića 5, 10000 Zagreb
SSRG International Journal of Electronics and Communication Engineering - (2'ICEIS 2017) - Special Issue April 2017
 - Special Issue April 2017") Eeg Based Brain Computer Interface For Communications And Control J.Abinaya,#1 R.JerlinEmiliya #2, #1,PG students [Communication system], Dept.of ECE, As-salam engineering and technology, Aduthurai, Tamilnadu,
Eeg Based Brain Computer Interface For Communications And Control J.Abinaya,#1 R.JerlinEmiliya #2, #1,PG students [Communication system], Dept.of ECE, As-salam engineering and technology, Aduthurai, Tamilnadu,
Classification of EEG Signal for Imagined Left and Right Hand Movement for Brain Computer Interface Applications
 Classification of EEG Signal for Imagined Left and Right Hand Movement for Brain Computer Interface Applications Indu Dokare 1, Naveeta Kant 2 1 Department Of Electronics and Telecommunication Engineering,
Classification of EEG Signal for Imagined Left and Right Hand Movement for Brain Computer Interface Applications Indu Dokare 1, Naveeta Kant 2 1 Department Of Electronics and Telecommunication Engineering,
IMPLEMENTATION OF REAL TIME BRAINWAVE VISUALISATION AND CHARACTERISATION
 Journal of Engineering Science and Technology Special Issue on SOMCHE 2014 & RSCE 2014 Conference, January (2015) 50-59 School of Engineering, Taylor s University IMPLEMENTATION OF REAL TIME BRAINWAVE
Journal of Engineering Science and Technology Special Issue on SOMCHE 2014 & RSCE 2014 Conference, January (2015) 50-59 School of Engineering, Taylor s University IMPLEMENTATION OF REAL TIME BRAINWAVE
International Journal of Scientific & Engineering Research, Volume 7, Issue 12, December ISSN
 International Journal of Scientific & Engineering Research, Volume 7, Issue 12, December-2016 686 Design of Robotic Architecture With Brain Mapped Wheelchair for Intelligent System Control: A State of
International Journal of Scientific & Engineering Research, Volume 7, Issue 12, December-2016 686 Design of Robotic Architecture With Brain Mapped Wheelchair for Intelligent System Control: A State of
A Diminutive Suggestion for Real-time Graz Cue-based Brain Computer Interface
 Vol. 1(3), Oct. 2015, PP. 180-185 A Diminutive Suggestion for Real-time Graz Cue-based Brain Computer Interface Sahar Seifzadeh 1, Karim Faez 2 and Mahmood Amiri 3 1 Faculty of Computer and Information
Vol. 1(3), Oct. 2015, PP. 180-185 A Diminutive Suggestion for Real-time Graz Cue-based Brain Computer Interface Sahar Seifzadeh 1, Karim Faez 2 and Mahmood Amiri 3 1 Faculty of Computer and Information
Teleoperation and System Health Monitoring Mo-Yuen Chow, Ph.D.
 Teleoperation and System Health Monitoring Mo-Yuen Chow, Ph.D. chow@ncsu.edu Advanced Diagnosis and Control (ADAC) Lab Department of Electrical and Computer Engineering North Carolina State University
Teleoperation and System Health Monitoring Mo-Yuen Chow, Ph.D. chow@ncsu.edu Advanced Diagnosis and Control (ADAC) Lab Department of Electrical and Computer Engineering North Carolina State University
INTELLIGENT WHEELCHAIRS
 INTELLIGENT WHEELCHAIRS Patrick Carrington INTELLWHEELS: MODULAR DEVELOPMENT PLATFORM FOR INTELLIGENT WHEELCHAIRS Rodrigo Braga, Marcelo Petry, Luis Reis, António Moreira INTRODUCTION IntellWheels is a
INTELLIGENT WHEELCHAIRS Patrick Carrington INTELLWHEELS: MODULAR DEVELOPMENT PLATFORM FOR INTELLIGENT WHEELCHAIRS Rodrigo Braga, Marcelo Petry, Luis Reis, António Moreira INTRODUCTION IntellWheels is a
Brain Controlled Wheel Chair for the Physically Challenged People using Neuro Sky Sensor
 Brain Controlled Wheel Chair for the Physically Challenged People using Neuro Sky Sensor Selvaganapathy Manoharan 1, Nishavithri Natarajan 2 Asst. Professor, Dept. of ECE, CK College of Engineering & Technology,
Brain Controlled Wheel Chair for the Physically Challenged People using Neuro Sky Sensor Selvaganapathy Manoharan 1, Nishavithri Natarajan 2 Asst. Professor, Dept. of ECE, CK College of Engineering & Technology,
Human Authentication from Brain EEG Signals using Machine Learning
 Volume 118 No. 24 2018 ISSN: 1314-3395 (on-line version) url: http://www.acadpubl.eu/hub/ http://www.acadpubl.eu/hub/ Human Authentication from Brain EEG Signals using Machine Learning Urmila Kalshetti,
Volume 118 No. 24 2018 ISSN: 1314-3395 (on-line version) url: http://www.acadpubl.eu/hub/ http://www.acadpubl.eu/hub/ Human Authentication from Brain EEG Signals using Machine Learning Urmila Kalshetti,
Research Article A Prototype SSVEP Based Real Time BCI Gaming System
 Computational Intelligence and Neuroscience Volume 2016, Article ID 3861425, 15 pages http://dx.doi.org/10.1155/2016/3861425 Research Article A Prototype SSVEP Based Real Time BCI Gaming System Ignas Martišius
Computational Intelligence and Neuroscience Volume 2016, Article ID 3861425, 15 pages http://dx.doi.org/10.1155/2016/3861425 Research Article A Prototype SSVEP Based Real Time BCI Gaming System Ignas Martišius
We are IntechOpen, the first native scientific publisher of Open Access books. International authors and editors. Our authors are among the TOP 1%
 We are IntechOpen, the first native scientific publisher of Open Access books 3,350 108,000 1.7 M Open access books available International authors and editors Downloads Our authors are among the 151 Countries
We are IntechOpen, the first native scientific publisher of Open Access books 3,350 108,000 1.7 M Open access books available International authors and editors Downloads Our authors are among the 151 Countries
Human Computer Interface Issues in Controlling Virtual Reality by Thought
 Human Computer Interface Issues in Controlling Virtual Reality by Thought Doron Friedman, Robert Leeb, Larisa Dikovsky, Miriam Reiner, Gert Pfurtscheller, and Mel Slater December 24, 2006 Abstract We have
Human Computer Interface Issues in Controlling Virtual Reality by Thought Doron Friedman, Robert Leeb, Larisa Dikovsky, Miriam Reiner, Gert Pfurtscheller, and Mel Slater December 24, 2006 Abstract We have
Research Article The Estimation of Cortical Activity for Brain-Computer Interface: Applications in a Domotic Context
 Computational Intelligence and Neuroscience Volume 2007, Article ID 91651, 7 pages doi:10.1155/2007/91651 Research Article The Estimation of Cortical Activity for Brain-Computer Interface: Applications
Computational Intelligence and Neuroscience Volume 2007, Article ID 91651, 7 pages doi:10.1155/2007/91651 Research Article The Estimation of Cortical Activity for Brain-Computer Interface: Applications
LAB 5: Mobile robots -- Modeling, control and tracking
 LAB 5: Mobile robots -- Modeling, control and tracking Overview In this laboratory experiment, a wheeled mobile robot will be used to illustrate Modeling Independent speed control and steering Longitudinal
LAB 5: Mobile robots -- Modeling, control and tracking Overview In this laboratory experiment, a wheeled mobile robot will be used to illustrate Modeling Independent speed control and steering Longitudinal
A willingness to explore everything and anything that will help us radiate limitless energy, focus, health and flow in everything we do.
 A willingness to explore everything and anything that will help us radiate limitless energy, focus, health and flow in everything we do. Event Agenda 7pm 7:30pm: Neurofeedback overview 7:30pm 8pm: Questions
A willingness to explore everything and anything that will help us radiate limitless energy, focus, health and flow in everything we do. Event Agenda 7pm 7:30pm: Neurofeedback overview 7:30pm 8pm: Questions
Eur Ing Dr. Lei Zhang Faculty of Engineering and Applied Science University of Regina Canada
 Eur Ing Dr. Lei Zhang Faculty of Engineering and Applied Science University of Regina Canada The Second International Conference on Neuroscience and Cognitive Brain Information BRAININFO 2017, July 22,
Eur Ing Dr. Lei Zhang Faculty of Engineering and Applied Science University of Regina Canada The Second International Conference on Neuroscience and Cognitive Brain Information BRAININFO 2017, July 22,
A Practical VEP-Based Brain Computer Interface
 234 IEEE TRANSACTIONS ON NEURAL SYSTEMS AND REHABILITATION ENGINEERING, VOL. 14, NO. 2, JUNE 2006 A Practical VEP-Based Brain Computer Interface Yijun Wang, Ruiping Wang, Xiaorong Gao, Bo Hong, and Shangkai
234 IEEE TRANSACTIONS ON NEURAL SYSTEMS AND REHABILITATION ENGINEERING, VOL. 14, NO. 2, JUNE 2006 A Practical VEP-Based Brain Computer Interface Yijun Wang, Ruiping Wang, Xiaorong Gao, Bo Hong, and Shangkai
Design and implementation of brain controlled wheelchair
 Design and implementation of brain controlled wheelchair R.Alageswaran Senior Lecturer alageswaranr@yahoo. com G.Vijayaraj Student vijay_gtav@yahoo.co. in B.Raja Mukesh Krishna Student funnyraja@gmail.com
Design and implementation of brain controlled wheelchair R.Alageswaran Senior Lecturer alageswaranr@yahoo. com G.Vijayaraj Student vijay_gtav@yahoo.co. in B.Raja Mukesh Krishna Student funnyraja@gmail.com
The Virtual Reality Brain-Computer Interface System for Ubiquitous Home Control
 The Virtual Reality Brain-Computer Interface System for Ubiquitous Home Control Hyun-sang Cho, Jayoung Goo, Dongjun Suh, Kyoung Shin Park, and Minsoo Hahn Digital Media Laboratory, Information and Communications
The Virtual Reality Brain-Computer Interface System for Ubiquitous Home Control Hyun-sang Cho, Jayoung Goo, Dongjun Suh, Kyoung Shin Park, and Minsoo Hahn Digital Media Laboratory, Information and Communications
Controlling a Robotic Arm by Brainwaves and Eye Movement
 Controlling a Robotic Arm by Brainwaves and Eye Movement Cristian-Cezar Postelnicu 1, Doru Talaba 2, and Madalina-Ioana Toma 1 1,2 Transilvania University of Brasov, Romania, Faculty of Mechanical Engineering,
Controlling a Robotic Arm by Brainwaves and Eye Movement Cristian-Cezar Postelnicu 1, Doru Talaba 2, and Madalina-Ioana Toma 1 1,2 Transilvania University of Brasov, Romania, Faculty of Mechanical Engineering,
Available online at ScienceDirect. Procedia Technology 24 (2016 )
") Available online at www.sciencedirect.com ScienceDirect Procedia Technology 24 (2016 ) 1089 1096 International Conference on Emerging Trends in Engineering, Science and Technology (ICETEST - 2015) Robotic
Available online at www.sciencedirect.com ScienceDirect Procedia Technology 24 (2016 ) 1089 1096 International Conference on Emerging Trends in Engineering, Science and Technology (ICETEST - 2015) Robotic
Design of Hands-Free System for Device Manipulation
 GDMS Sr Engineer Mike DeMichele Design of Hands-Free System for Device Manipulation Current System: Future System: Motion Joystick Requires physical manipulation of input device No physical user input
GDMS Sr Engineer Mike DeMichele Design of Hands-Free System for Device Manipulation Current System: Future System: Motion Joystick Requires physical manipulation of input device No physical user input
A wireless neural recording system with a precision motorized microdrive for freely
 A wireless neural recording system with a precision motorized microdrive for freely behaving animals Taku Hasegawa, Hisataka Fujimoto, Koichiro Tashiro, Mayu Nonomura, Akira Tsuchiya, and Dai Watanabe
A wireless neural recording system with a precision motorized microdrive for freely behaving animals Taku Hasegawa, Hisataka Fujimoto, Koichiro Tashiro, Mayu Nonomura, Akira Tsuchiya, and Dai Watanabe
BRAINWAVE CONTROLLED WHEEL CHAIR USING EYE BLINKS
 BRAINWAVE CONTROLLED WHEEL CHAIR USING EYE BLINKS Harshavardhana N R 1, Anil G 2, Girish R 3, DharshanT 4, Manjula R Bharamagoudra 5 1,2,3,4,5 School of Electronicsand Communication, REVA University,Bangalore-560064
BRAINWAVE CONTROLLED WHEEL CHAIR USING EYE BLINKS Harshavardhana N R 1, Anil G 2, Girish R 3, DharshanT 4, Manjula R Bharamagoudra 5 1,2,3,4,5 School of Electronicsand Communication, REVA University,Bangalore-560064