CENTER OF MODERN CONTROL TECHNIQUES A INDUSTRIAL INFORMATICS
|
|
|
- Ethelbert Osborne
- 5 years ago
- Views:
Transcription



1 CENTER OF MODERN CONTROL TECHNIQUES A INDUSTRIAL INFORMATICS WORKING WIITHIN DEPARTMENT OF CYBERNETICS AND ARTIFICAL INTELLIGENCE, TU KOŠICE doc. Ing. Ján Jadlovský, CSc. Head of the CMCT & II Technical university of Košice Faculty of Faculty of Electrical Engineering and Informatics Department of Cybernetics and Artifical Intelligence




2 Center of Modern Control Techniques and Industrial Informatics within DCAI CMCT & II doc. Ing. Ján Jadlovský, CSc.
3 kyb.fei.tuke.sk/laben
4 CMCT & II research center focuses on education and research in the field of modern methods of control and industrial automation CMCT & II is equipped with the latest development, simulation and implementation tools used in control, information systems, management information systems and communication systems the results are applied in the educational process of subjects of Bachelor and Master studies, in basic research of FEEI and in solving practical problems in manufacturing enterprises based on the five-level pyramid model of DCS (Distributed Control Systems), research and development of different parts of the DCAI control system are realized
5 Infrastructure of the DCS in DCAI



 Computer")
")

")
6 CMCT & II Laboratories of CMCT & II Laboratory of Mechatronic Systems (V142) Laboratory of Technological Process Control (V144) Laboratory of Computer Control System Design (V101b) Laboratory of Production Lines and Image Recognition (V147) Laboratory of Robotics (V134)



7 Selected laboratory models of CMCT & II



8 Partners of CMCT & II
9 COOPETARION OF FEEI - TU KOŠICE WITH CERN ON ALICE EXPERIMENT Project: Experiment ALICE on LHC in CERN : Study of strongly interacting matter at extreme energy densities Project status: Basic research Research and development field: Nuclear and sub-nuclear physics responsible researcher in FEEI - TUKE: doc. Ing. Ján Jadlovský, CSc.
10 TU Košice cooperation on project ALICE-CERN October 2012 TU Košice was accepted as associate member of ALICE CERN collaboration September 2014 TU Košice was accepted as full member of ALICE CERN collaboration June 2015 was accepted as associate member of HepTech - High-Energry Physics Technology Transfer Network Board
11 ITS inovation is focused on Pixel Detector development with the request to identification of particles trajectories (particles positions), which are product of the Pb-Pb collisions with energy 4 TeV to n-n pair. Solved tasks in project: 1. Control of Pixel Detector 2. Hybrid Integrated Circuit (HIC) development designed for acquisition and processing of signals received from ALICE detectors 3. Development of program modules for control and communication infrastructure of DCS

12 Basic parts of DCS (Detector Control System)

13 DCS Architecture User Interface Layer Operations Layer Controls Layer Device abstraction Layer Field Layer Intuitive human interface Hierarchy and partitioning by FSM Core SCADA based on WINCC OA OPC and FED servers DCS devices User Interface Layer Operations Layer Device abstraction Layer Controls Layer Field Layer
14 Solved tasks in the project Tasks at RDBS Oracle level dealing with configuring the parameters of the experiment from the configuration database and archiving data into the archival database Tasks for sequence control of pixel detectors and their protection from destruction at WinCC OA level Communication between different levels of control system realized for including the control system of pixel detectors into the infrastructure of DCS ALICE communication module between DCS & sensors and algorithms of data collection from sensors which will be provided in the form of a hybrid integrated circuits after finish of development, generally designed for data acquisition and control detectors at CERN



15 Interconnection between DCS ALICE and DCS in DCAI Real-time connection with CERN Connection DCS in KKUI and DCS ALICE CERN
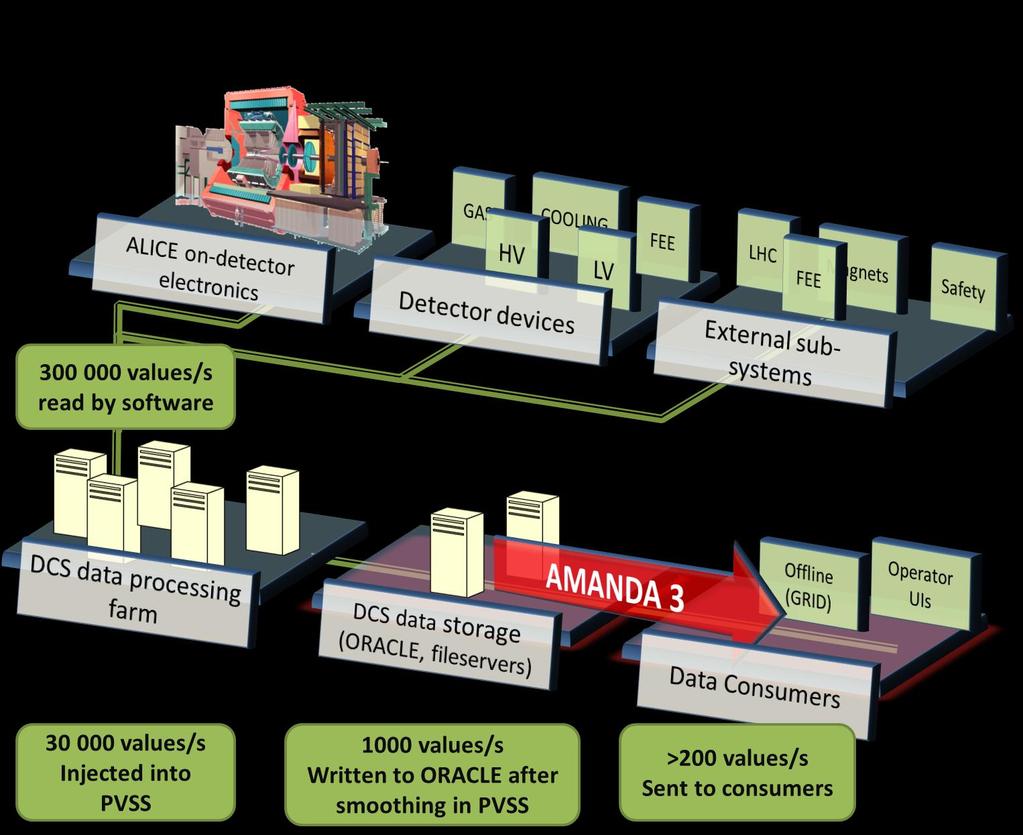
16 Alice DCS

17 ALICE DCS AMANDA 3 IS

18 Detector ALICE




19 Upgrade of the ALICE Inner Tracking System PIXEL DETECTOR
20 Testing workplace of Hybrid Integrated Circuit (HIC)

21 Infrastructure of models of developed DCS


22 Laboratory workplace for connecting the sensors into DCS infrastructure
23 PROJECT OF APPLIED RESEARCH TECHNICOM
24 Infrastructure of DCS in DCAI
25 Project TECHNICOM Center of non destructive diagnostics of technological processes output of the project is functional methodology workplace with focus on solving of tasks from field of modeling, control and diagnostics of technological processes using non destructive techniques. one of the forms from project TECHNICOM outputs for part Center of non destructive diagnostics is set of model applications, that are divided into following parts
26 Areas of applied research Model applications with the implementation of camera systems Simulation of matter state transitions Guidance of Mitsubishi Melfa manipulator Quality control in FMS Intelligent positioning surface Guidance in robotic soccer and maze Workplace of non destructive diagnostics with linear drive Monitoring and diagnostics of thermodynamic processes based on thermo vision camera Model applications for mechatronic systems Rotary inverted pendulum Intelligent positioning surface Workplace of non destructive diagnostics with linear drive classical inverted pendulum Library of simulation models for under actuated systems Hydraulic system with frequency converter Model applications for mobile robotics Diagnostics of sensors and actuators of robotic soccer player of MiroSot category Manual and supervisory control of mobile robots Robotic soccer application Library of simulation models for wheeled mobile robots Model applications for FAC and FMS DCS for flexible manufacturing system DSR for automated manufacturing lines FMS and industrial robot Control of robotized manufacturing workplace



27 Model applications with the implementation of camera systems Simulation of matter state transitions


28 Model applications with the implementation of camera systems Guidance of Mitsubishi Melfa manipulator Quality control in flexible manufacturing system




29 Model applications with the implementation of camera systems Intelligent positioning surface Guidance in robotic soccer and maze



30 Model applications with the implementation of camera systems Workplace of non destructive diagnostics with linear drive Monitoring and diagnostics of thermodynamic processes based on thermo vision camera


31 Model applications for mechatronic systems Rotary inverted pendulum Intelligent positioning surface



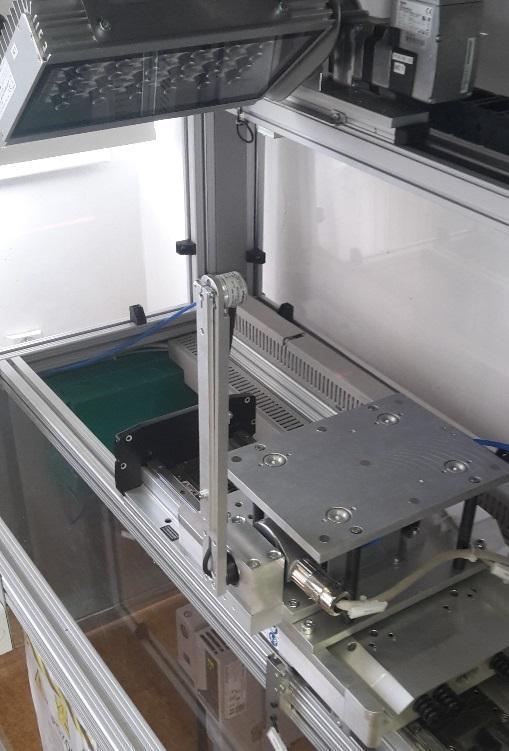

32 Workplace of non destructive diagnostics with linear drive

33 Model applications for mechatronic systems Hydraulic system with frequency converter



34 Model applications for mobile robotics Diagnostics of sensors and actuators of robotic soccer player of MiroSot category Manual and supervisory control of mobile robots


35 Model applications for mobile robotics Robotic soccer application Library of simulation models for wheeled mobile robots



36 Model applications for FAC and FMS Flexible assembly company and industrial robot


37 Model applications for FAC and FMS Flexible manufacturing system
38 Thank you for your attention CMCT & II - kyb.fei.tuke.sk
Conference Summary Report
 Conference Summary Report on Academia-Industry Matching Event on the Mutual Impact of Industry 4.0 and High-Energy Physics Slovakia, March 15-16, 2018 INDUSTRY 4.0 high-tech strategy for German government
Conference Summary Report on Academia-Industry Matching Event on the Mutual Impact of Industry 4.0 and High-Energy Physics Slovakia, March 15-16, 2018 INDUSTRY 4.0 high-tech strategy for German government
Proceedings from Conference
 Scientific Conference of Young Researchers 2018 th 18 Scientific Conference of Young Researchers th May 14, 2018 Herľany, Slovakia Proceedings from Conference Faculty of Electrical Engineering and Informatics
Scientific Conference of Young Researchers 2018 th 18 Scientific Conference of Young Researchers th May 14, 2018 Herľany, Slovakia Proceedings from Conference Faculty of Electrical Engineering and Informatics
NCCT IEEE PROJECTS ADVANCED ROBOTICS SOLUTIONS. Latest Projects, in various Domains. Promise for the Best Projects
 NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
* Intelli Robotic Wheel Chair for Specialty Operations & Physically Challenged
 ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
IEEE Systems, Man, and Cybernetics Society s Perspectives and Brain-Related Technical Activities
 IEEE, Man, and Cybernetics Society s Perspectives and Brain-Related Technical Activities Michael H. Smith IEEE Brain Initiative New York City Three Broad Categories that Span IEEE Development of: novel
IEEE, Man, and Cybernetics Society s Perspectives and Brain-Related Technical Activities Michael H. Smith IEEE Brain Initiative New York City Three Broad Categories that Span IEEE Development of: novel
EMBEDDED CONTROL SYSTEM FOR MOBILE ROBOTS WITH DIFFERENTIAL DRIVE
 42 Acta Electrotechnica et Informatica, Vol. 17, No. 3, 2017, 42 47, DOI: 10.15546/aeei-2017-0025 EMBEDDED CONTROL SYSTEM FOR MOBILE ROBOTS WITH DIFFERENTIAL DRIVE Michal KOPČÍK, Ján JADLOVSKÝ Department
42 Acta Electrotechnica et Informatica, Vol. 17, No. 3, 2017, 42 47, DOI: 10.15546/aeei-2017-0025 EMBEDDED CONTROL SYSTEM FOR MOBILE ROBOTS WITH DIFFERENTIAL DRIVE Michal KOPČÍK, Ján JADLOVSKÝ Department
MICROCHIP PATTERN RECOGNITION BASED ON OPTICAL CORRELATOR
 38 Acta Electrotechnica et Informatica, Vol. 17, No. 2, 2017, 38 42, DOI: 10.15546/aeei-2017-0014 MICROCHIP PATTERN RECOGNITION BASED ON OPTICAL CORRELATOR Dávid SOLUS, Ľuboš OVSENÍK, Ján TURÁN Department
38 Acta Electrotechnica et Informatica, Vol. 17, No. 2, 2017, 38 42, DOI: 10.15546/aeei-2017-0014 MICROCHIP PATTERN RECOGNITION BASED ON OPTICAL CORRELATOR Dávid SOLUS, Ľuboš OVSENÍK, Ján TURÁN Department
Successful Cases of Knowledge Transfer (Examples)
") Successful Cases of Knowledge Transfer (Examples) Pablo Garcia Tello Section Head, EU Initiatives IPT Department 26 October 2017, Presentation INEUSTAR-PIONEERS Programme Start-ups using CERN Technologies
Successful Cases of Knowledge Transfer (Examples) Pablo Garcia Tello Section Head, EU Initiatives IPT Department 26 October 2017, Presentation INEUSTAR-PIONEERS Programme Start-ups using CERN Technologies
THE NEW GENERATION OF MANUFACTURING SYSTEMS
 THE NEW GENERATION OF MANUFACTURING SYSTEMS Ing. Andrea Lešková, PhD. Technical University in Košice, Faculty of Mechanical Engineering, Mäsiarska 74, 040 01 Košice e-mail: andrea.leskova@tuke.sk Abstract
THE NEW GENERATION OF MANUFACTURING SYSTEMS Ing. Andrea Lešková, PhD. Technical University in Košice, Faculty of Mechanical Engineering, Mäsiarska 74, 040 01 Košice e-mail: andrea.leskova@tuke.sk Abstract
MECHATRONICS Master study program. St. Kliment Ohridski University in Bitola Faculty of Technical Sciences Bitola.
 MECHATRONICS Master study program St. Kliment Ohridski University in Bitola Faculty of Technical Sciences Bitola www.tfb.edu.mk 1 2 Contents Mechatronics - an interdisciplinary approach Competences / Invest
MECHATRONICS Master study program St. Kliment Ohridski University in Bitola Faculty of Technical Sciences Bitola www.tfb.edu.mk 1 2 Contents Mechatronics - an interdisciplinary approach Competences / Invest
Hybrid architectures. IAR Lecture 6 Barbara Webb
 Hybrid architectures IAR Lecture 6 Barbara Webb Behaviour Based: Conclusions But arbitrary and difficult to design emergent behaviour for a given task. Architectures do not impose strong constraints Options?
Hybrid architectures IAR Lecture 6 Barbara Webb Behaviour Based: Conclusions But arbitrary and difficult to design emergent behaviour for a given task. Architectures do not impose strong constraints Options?
Distributed Robotics: Building an environment for digital cooperation. Artificial Intelligence series
 Distributed Robotics: Building an environment for digital cooperation Artificial Intelligence series Distributed Robotics March 2018 02 From programmable machines to intelligent agents Robots, from the
Distributed Robotics: Building an environment for digital cooperation Artificial Intelligence series Distributed Robotics March 2018 02 From programmable machines to intelligent agents Robots, from the
Smart Products and Digital Industry Prof. Dr.-Ing. Dietmar Goehlich
 Smart Products and Digital Industry Prof. Dr.-Ing. Dietmar Goehlich Technische Universität Berlin Faculty of Mechanical Engineering and Transport Systems Methods for Product Development and Mechatronics
Smart Products and Digital Industry Prof. Dr.-Ing. Dietmar Goehlich Technische Universität Berlin Faculty of Mechanical Engineering and Transport Systems Methods for Product Development and Mechatronics
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT
 MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
Roles of the Technical University of Kosice (TUKE) in Innovation Ecosystem: Examples and Experiences
 in Innovation Ecosystem: Examples and Experiences") 37th Conference of Rectors and Presidents of European Universities of Technology The University Role in Developing Innovation Ecosystems September 14th-15th, 2018 Day 2: Section I: Universities Roles in
37th Conference of Rectors and Presidents of European Universities of Technology The University Role in Developing Innovation Ecosystems September 14th-15th, 2018 Day 2: Section I: Universities Roles in
Prof. Emil M. Petriu 17 January 2005 CEG 4392 Computer Systems Design Project (Winter 2005)
") Project title: Optical Path Tracking Mobile Robot with Object Picking Project number: 1 A mobile robot controlled by the Altera UP -2 board and/or the HC12 microprocessor will have to pick up and drop
Project title: Optical Path Tracking Mobile Robot with Object Picking Project number: 1 A mobile robot controlled by the Altera UP -2 board and/or the HC12 microprocessor will have to pick up and drop
Andrés Sánchez González. FTEC 2nd Workshop. CERN and CIEMAT. CERN Graphic Charter: use of the outline version of the CERN logo.
 Design, production and test of readout electronics for the assessment of the radiation hardness of pixel sensor based detector components for the ALICE ITS Upgrade project Andrés Sánchez González CERN
Design, production and test of readout electronics for the assessment of the radiation hardness of pixel sensor based detector components for the ALICE ITS Upgrade project Andrés Sánchez González CERN
Simulations Of Busy Probabilities In The ALPIDE Chip And The Upgraded ALICE ITS Detector
 Simulations Of Busy Probabilities In The ALPIDE Chip And The Upgraded ALICE ITS Detector a, J. Alme b, M. Bonora e, P. Giubilato c, H. Helstrup a, S. Hristozkov e, G. Aglieri Rinella e, D. Röhrich b, J.
Simulations Of Busy Probabilities In The ALPIDE Chip And The Upgraded ALICE ITS Detector a, J. Alme b, M. Bonora e, P. Giubilato c, H. Helstrup a, S. Hristozkov e, G. Aglieri Rinella e, D. Röhrich b, J.
Intelligent Buildings Remote Monitoring Using PI System at the VSB - Technical University of Ostrava Jan Vanus
 Intelligent Buildings Remote Monitoring Using PI System at the VSB - Technical University of Ostrava Jan Vanus 1 Presentation Agenda: About VŠB TU Ostrava OSIsoft and Intelligent Building monitoring how
Intelligent Buildings Remote Monitoring Using PI System at the VSB - Technical University of Ostrava Jan Vanus 1 Presentation Agenda: About VŠB TU Ostrava OSIsoft and Intelligent Building monitoring how
Available theses (October 2011) MERLIN Group
 MERLIN Group") Available theses (October 2011) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
Available theses (October 2011) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
CS295-1 Final Project : AIBO
 CS295-1 Final Project : AIBO Mert Akdere, Ethan F. Leland December 20, 2005 Abstract This document is the final report for our CS295-1 Sensor Data Management Course Final Project: Project AIBO. The main
CS295-1 Final Project : AIBO Mert Akdere, Ethan F. Leland December 20, 2005 Abstract This document is the final report for our CS295-1 Sensor Data Management Course Final Project: Project AIBO. The main
THE INNOVATION COMPANY ROBOTICS. Institute for Robotics and Mechatronics
 THE INNOVATION COMPANY ROBOTICS Institute for Robotics and Mechatronics The fields in which we research and their associated infrastructure enable us to carry out pioneering research work and provide solutions
THE INNOVATION COMPANY ROBOTICS Institute for Robotics and Mechatronics The fields in which we research and their associated infrastructure enable us to carry out pioneering research work and provide solutions
Newsletter. Date: 16 th of February, 2017 Research Area: Robust and Flexible Automation (RA2)
") www.sfimanufacturing.no Newsletter Date: 16 th of February, 2017 Research Area: Robust and Flexible Automation (RA2) This newsletter is published prior to each workshop of SFI Manufacturing. The aim is
www.sfimanufacturing.no Newsletter Date: 16 th of February, 2017 Research Area: Robust and Flexible Automation (RA2) This newsletter is published prior to each workshop of SFI Manufacturing. The aim is
Journal Title ISSN 5. MIS QUARTERLY BRIEFINGS IN BIOINFORMATICS
 List of Journals with impact factors Date retrieved: 1 August 2009 Journal Title ISSN Impact Factor 5-Year Impact Factor 1. ACM SURVEYS 0360-0300 9.920 14.672 2. VLDB JOURNAL 1066-8888 6.800 9.164 3. IEEE
List of Journals with impact factors Date retrieved: 1 August 2009 Journal Title ISSN Impact Factor 5-Year Impact Factor 1. ACM SURVEYS 0360-0300 9.920 14.672 2. VLDB JOURNAL 1066-8888 6.800 9.164 3. IEEE
Collaboration of Slovak Industry with CERN Future plans and vision
 Collaboration of Slovak Industry with CERN Future plans and vision Barbora Bruant Gulejova Industrial Liaison Officer (ILO) & Representative at Knowledge Transfer Forum of CERN 1 Collaboration of Slovak
Collaboration of Slovak Industry with CERN Future plans and vision Barbora Bruant Gulejova Industrial Liaison Officer (ILO) & Representative at Knowledge Transfer Forum of CERN 1 Collaboration of Slovak
The Evolution of Artificial Intelligence in Workplaces
 The Evolution of Artificial Intelligence in Workplaces Cognitive Hubs for Future Workplaces In the last decade, workplaces have started to evolve towards digitalization. In the future, people will work
The Evolution of Artificial Intelligence in Workplaces Cognitive Hubs for Future Workplaces In the last decade, workplaces have started to evolve towards digitalization. In the future, people will work
CERN-PH-ADO-MN For Internal Discussion. ATTRACT Initiative. Markus Nordberg Marzio Nessi
 CERN-PH-ADO-MN-190413 For Internal Discussion ATTRACT Initiative Markus Nordberg Marzio Nessi Introduction ATTRACT is an initiative for managing the funding of radiation detector and imaging R&D work.
CERN-PH-ADO-MN-190413 For Internal Discussion ATTRACT Initiative Markus Nordberg Marzio Nessi Introduction ATTRACT is an initiative for managing the funding of radiation detector and imaging R&D work.
SIMULATION-BASED MODEL CONTROL USING STATIC HAND GESTURES IN MATLAB
 SIMULATION-BASED MODEL CONTROL USING STATIC HAND GESTURES IN MATLAB S. Kajan, J. Goga Institute of Robotics and Cybernetics, Faculty of Electrical Engineering and Information Technology, Slovak University
SIMULATION-BASED MODEL CONTROL USING STATIC HAND GESTURES IN MATLAB S. Kajan, J. Goga Institute of Robotics and Cybernetics, Faculty of Electrical Engineering and Information Technology, Slovak University
CAPACITIES FOR TECHNOLOGY TRANSFER
 CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
FalconBots RoboCup Humanoid Kid -Size 2014 Team Description Paper. Minero, V., Juárez, J.C., Arenas, D. U., Quiroz, J., Flores, J.A.
 FalconBots RoboCup Humanoid Kid -Size 2014 Team Description Paper Minero, V., Juárez, J.C., Arenas, D. U., Quiroz, J., Flores, J.A. Robotics Application Workshop, Instituto Tecnológico Superior de San
FalconBots RoboCup Humanoid Kid -Size 2014 Team Description Paper Minero, V., Juárez, J.C., Arenas, D. U., Quiroz, J., Flores, J.A. Robotics Application Workshop, Instituto Tecnológico Superior de San
TIP List Sorted By Numerical Order (as of January 2018)
") TIP List Sorted By Numerical Order (as of January 2018) 2001 SIGNAL PROCESSING 2003 ANTENNAS AND PROPAGATION 2004 CIRCUITS AND SYSTEMS 2006 VEHICULAR TECHNOLOGY 2007 RELIABILITY 2008 CONSUMER ELECTRONICS
TIP List Sorted By Numerical Order (as of January 2018) 2001 SIGNAL PROCESSING 2003 ANTENNAS AND PROPAGATION 2004 CIRCUITS AND SYSTEMS 2006 VEHICULAR TECHNOLOGY 2007 RELIABILITY 2008 CONSUMER ELECTRONICS
The LHCb Upgrade BEACH Simon Akar on behalf of the LHCb collaboration
 The LHCb Upgrade BEACH 2014 XI International Conference on Hyperons, Charm and Beauty Hadrons! University of Birmingham, UK 21-26 July 2014 Simon Akar on behalf of the LHCb collaboration Outline The LHCb
The LHCb Upgrade BEACH 2014 XI International Conference on Hyperons, Charm and Beauty Hadrons! University of Birmingham, UK 21-26 July 2014 Simon Akar on behalf of the LHCb collaboration Outline The LHCb
Robotics Introduction Matteo Matteucci
 Robotics Introduction About me and my lectures 2 Lectures given by Matteo Matteucci +39 02 2399 3470 matteo.matteucci@polimi.it http://www.deib.polimi.it/ Research Topics Robotics and Autonomous Systems
Robotics Introduction About me and my lectures 2 Lectures given by Matteo Matteucci +39 02 2399 3470 matteo.matteucci@polimi.it http://www.deib.polimi.it/ Research Topics Robotics and Autonomous Systems
Essential Understandings with Guiding Questions Robotics Engineering
 Essential Understandings with Guiding Questions Robotics Engineering 1 st Quarter Theme: Orientation to a Successful Laboratory Experience Student Expectations Safety Emergency MSDS Organizational Systems
Essential Understandings with Guiding Questions Robotics Engineering 1 st Quarter Theme: Orientation to a Successful Laboratory Experience Student Expectations Safety Emergency MSDS Organizational Systems
OPEN CV BASED AUTONOMOUS RC-CAR
 OPEN CV BASED AUTONOMOUS RC-CAR B. Sabitha 1, K. Akila 2, S.Krishna Kumar 3, D.Mohan 4, P.Nisanth 5 1,2 Faculty, Department of Mechatronics Engineering, Kumaraguru College of Technology, Coimbatore, India
OPEN CV BASED AUTONOMOUS RC-CAR B. Sabitha 1, K. Akila 2, S.Krishna Kumar 3, D.Mohan 4, P.Nisanth 5 1,2 Faculty, Department of Mechatronics Engineering, Kumaraguru College of Technology, Coimbatore, India
Making Representations: From Sensation to Perception
 Making Representations: From Sensation to Perception Mary-Anne Williams Innovation and Enterprise Research Lab University of Technology, Sydney Australia Overview Understanding Cognition Understanding
Making Representations: From Sensation to Perception Mary-Anne Williams Innovation and Enterprise Research Lab University of Technology, Sydney Australia Overview Understanding Cognition Understanding
ROBOTICS, Jump to the next generation
 ROBOTICS, Jump to the next generation Erich Lohrmann Area Director Latin America KUKA Roboter GmbH COPY RIGHTS by Erich Lohrmann Human Evolution Robotic Evolution (by KUKA) International Conference on
ROBOTICS, Jump to the next generation Erich Lohrmann Area Director Latin America KUKA Roboter GmbH COPY RIGHTS by Erich Lohrmann Human Evolution Robotic Evolution (by KUKA) International Conference on
Advanced robotics for Industry 4.0. Michael Valášek, Martin Nečas CTU in Prague, Faculty of Mechanical Engineering
 Advanced robotics for Industry 4.0 Michael Valášek, Martin Nečas CTU in Prague, Faculty of Mechanical Engineering Scope of presentation Directions of current research Examples of advanced robotics Conclusion
Advanced robotics for Industry 4.0 Michael Valášek, Martin Nečas CTU in Prague, Faculty of Mechanical Engineering Scope of presentation Directions of current research Examples of advanced robotics Conclusion
Great Minds. Internship Program IBM Research - China
 Internship Program 2017 Internship Program 2017 Jump Start Your Future at IBM Research China Introduction invites global candidates to apply for the 2017 Great Minds internship program located in Beijing
Internship Program 2017 Internship Program 2017 Jump Start Your Future at IBM Research China Introduction invites global candidates to apply for the 2017 Great Minds internship program located in Beijing
Research Collaboration against the Backdrop. of the Global Economic Challenges
 Research Collaboration against the Backdrop Dipl.-Wirtsch.-Ing. (TU) Henrik A. Schunk 41. International June Symposium 7 th, 2010 on Robotics Henrik June Schunk 7 th, 2010Folie 1 Agenda 1. One Team One
Research Collaboration against the Backdrop Dipl.-Wirtsch.-Ing. (TU) Henrik A. Schunk 41. International June Symposium 7 th, 2010 on Robotics Henrik June Schunk 7 th, 2010Folie 1 Agenda 1. One Team One
The secret behind mechatronics
 The secret behind mechatronics Why companies will want to be part of the revolution In the 18th century, steam and mechanization powered the first Industrial Revolution. At the turn of the 20th century,
The secret behind mechatronics Why companies will want to be part of the revolution In the 18th century, steam and mechanization powered the first Industrial Revolution. At the turn of the 20th century,
Robotic Technology for Port and Maritime Automation
 Industrial/Service Robots Field Robots Robotic Technology for Port and Maritime Automation Presenter: Assoc Prof Chen I-Ming Director, Robotics Research Center & Intelligent Systems Center School of Mechanical
Industrial/Service Robots Field Robots Robotic Technology for Port and Maritime Automation Presenter: Assoc Prof Chen I-Ming Director, Robotics Research Center & Intelligent Systems Center School of Mechanical
The Open University of Sri Lanka
 The Open University of Sri Lanka The Open University of Sri Lanka (OUSL) was established in 1980 under the University Act No.16 of 1978. It has the same legal and academic status as any other national
The Open University of Sri Lanka The Open University of Sri Lanka (OUSL) was established in 1980 under the University Act No.16 of 1978. It has the same legal and academic status as any other national
DESIGN CONCEPT OF DIGITAL PRODUCTION SYSTEMS
 DESIGN CONCEPT OF DIGITAL PRODUCTION SYSTEMS Ing. Daniela Onofrejova, PhD. Ing. Jaroslava Janekova, PhD. Technical University of Kosice, Faculty of Mechanical Engineering, Institute of Management, Industrial
DESIGN CONCEPT OF DIGITAL PRODUCTION SYSTEMS Ing. Daniela Onofrejova, PhD. Ing. Jaroslava Janekova, PhD. Technical University of Kosice, Faculty of Mechanical Engineering, Institute of Management, Industrial
UNIVERSIDAD CARLOS III DE MADRID ESCUELA POLITÉCNICA SUPERIOR
 UNIVERSIDAD CARLOS III DE MADRID ESCUELA POLITÉCNICA SUPERIOR TRABAJO DE FIN DE GRADO GRADO EN INGENIERÍA DE SISTEMAS DE COMUNICACIONES CONTROL CENTRALIZADO DE FLOTAS DE ROBOTS CENTRALIZED CONTROL FOR
UNIVERSIDAD CARLOS III DE MADRID ESCUELA POLITÉCNICA SUPERIOR TRABAJO DE FIN DE GRADO GRADO EN INGENIERÍA DE SISTEMAS DE COMUNICACIONES CONTROL CENTRALIZADO DE FLOTAS DE ROBOTS CENTRALIZED CONTROL FOR
A BRIEF REVIEW ON MECHATRONICS RESEARCH AND OPPORTUNITIES
 A BRIEF REVIEW ON MECHATRONICS RESEARCH AND OPPORTUNITIES Dinesh Kumar 1, Sanjay Kumar Mirania 2, Shailendra Kumar Bohidar 3 1,2 Lecturer, Electronics and Tele.Comm. Kirodimal Institute of Technology,
A BRIEF REVIEW ON MECHATRONICS RESEARCH AND OPPORTUNITIES Dinesh Kumar 1, Sanjay Kumar Mirania 2, Shailendra Kumar Bohidar 3 1,2 Lecturer, Electronics and Tele.Comm. Kirodimal Institute of Technology,
NETIS Networking International School. 2 nd edition. An event organized by MIV Imaging Venture and supported by ACEOLE - a Marie Curie program
 NETIS 2011 Networking International School 2 nd edition An event organized by MIV Imaging Venture and supported by ACEOLE - a Marie Curie program PROGRAMME DAYONE 24 th February 2011 8:30 9:00 Registration
NETIS 2011 Networking International School 2 nd edition An event organized by MIV Imaging Venture and supported by ACEOLE - a Marie Curie program PROGRAMME DAYONE 24 th February 2011 8:30 9:00 Registration
Laboratory Experiences to Hands on
 Complementary Simulation i and Remote Laboratory Experiences to Hands on Control lsystems Curriculum Dr. Daniel Cox Professor of Mechanical Engineering g University of North Florida Jacksonville Florida
Complementary Simulation i and Remote Laboratory Experiences to Hands on Control lsystems Curriculum Dr. Daniel Cox Professor of Mechanical Engineering g University of North Florida Jacksonville Florida
SIGVerse - A Simulation Platform for Human-Robot Interaction Jeffrey Too Chuan TAN and Tetsunari INAMURA National Institute of Informatics, Japan The
 SIGVerse - A Simulation Platform for Human-Robot Interaction Jeffrey Too Chuan TAN and Tetsunari INAMURA National Institute of Informatics, Japan The 29 th Annual Conference of The Robotics Society of
SIGVerse - A Simulation Platform for Human-Robot Interaction Jeffrey Too Chuan TAN and Tetsunari INAMURA National Institute of Informatics, Japan The 29 th Annual Conference of The Robotics Society of
Multi-Agent Control Structure for a Vision Based Robot Soccer System
 Multi- Control Structure for a Vision Based Robot Soccer System Yangmin Li, Wai Ip Lei, and Xiaoshan Li Department of Electromechanical Engineering Faculty of Science and Technology University of Macau
Multi- Control Structure for a Vision Based Robot Soccer System Yangmin Li, Wai Ip Lei, and Xiaoshan Li Department of Electromechanical Engineering Faculty of Science and Technology University of Macau
CORC 3303 Exploring Robotics. Why Teams?
 Exploring Robotics Lecture F Robot Teams Topics: 1) Teamwork and Its Challenges 2) Coordination, Communication and Control 3) RoboCup Why Teams? It takes two (or more) Such as cooperative transportation:
Exploring Robotics Lecture F Robot Teams Topics: 1) Teamwork and Its Challenges 2) Coordination, Communication and Control 3) RoboCup Why Teams? It takes two (or more) Such as cooperative transportation:
ATLAS Phase-II Upgrade Pixel Data Transmission Development
 ATLAS Phase-II Upgrade Pixel Data Transmission Development, on behalf of the ATLAS ITk project Physics Department and Santa Cruz Institute for Particle Physics, University of California, Santa Cruz 95064
ATLAS Phase-II Upgrade Pixel Data Transmission Development, on behalf of the ATLAS ITk project Physics Department and Santa Cruz Institute for Particle Physics, University of California, Santa Cruz 95064
Teciam. Part K. Robotics
 Part K > Basic Technologies > Contents Table of Contents Introduction Introduction... K-3 Training Approach Training Approach... K-3 Modular Production System Modular Production System MPS... K-4 Technology
Part K > Basic Technologies > Contents Table of Contents Introduction Introduction... K-3 Training Approach Training Approach... K-3 Modular Production System Modular Production System MPS... K-4 Technology
FUNDAMENTALS OF CAPP SYSTEM DESIGN
 FUNDAMENTALS OF CAPP SYSTEM DESIGN Author: Workplace: Address: Email: Jana JEDINÁKOVÁ Department of Manufacturing technologies, Faculty of Manufacturing Technologies of TU Košice with the seat in Prešov
FUNDAMENTALS OF CAPP SYSTEM DESIGN Author: Workplace: Address: Email: Jana JEDINÁKOVÁ Department of Manufacturing technologies, Faculty of Manufacturing Technologies of TU Košice with the seat in Prešov
TECHNICAL UNIVERSITY OF KOŠICE (TUKE)
") TECHNICAL UNIVERSITY OF KOŠICE (TUKE) AND DEVELOPMENT AND REALIZATION WORKPLACE (VRP) OF RAW MATERIALS EXTRACTING AND TREATMENT (The top level R&D center for Raw Materials processing at TUKE) Offer: VRP
TECHNICAL UNIVERSITY OF KOŠICE (TUKE) AND DEVELOPMENT AND REALIZATION WORKPLACE (VRP) OF RAW MATERIALS EXTRACTING AND TREATMENT (The top level R&D center for Raw Materials processing at TUKE) Offer: VRP
Tracking and Alignment in the CMS detector
 Tracking and Alignment in the CMS detector Frédéric Ronga (CERN PH-CMG) for the CMS collaboration 10th Topical Seminar on Innovative Particle and Radiation Detectors Siena, October 1 5 2006 Contents 1
Tracking and Alignment in the CMS detector Frédéric Ronga (CERN PH-CMG) for the CMS collaboration 10th Topical Seminar on Innovative Particle and Radiation Detectors Siena, October 1 5 2006 Contents 1
Fundamentals of Robotics
 Coordinating unit: Teaching unit: Academic year: Degree: ECTS credits: 2017 205 - ESEIAAT - Terrassa School of Industrial, Aerospace and Audiovisual Engineering 707 - ESAII - Department of Automatic Control
Coordinating unit: Teaching unit: Academic year: Degree: ECTS credits: 2017 205 - ESEIAAT - Terrassa School of Industrial, Aerospace and Audiovisual Engineering 707 - ESAII - Department of Automatic Control
Virtual Grasping Using a Data Glove
 Virtual Grasping Using a Data Glove By: Rachel Smith Supervised By: Dr. Kay Robbins 3/25/2005 University of Texas at San Antonio Motivation Navigation in 3D worlds is awkward using traditional mouse Direct
Virtual Grasping Using a Data Glove By: Rachel Smith Supervised By: Dr. Kay Robbins 3/25/2005 University of Texas at San Antonio Motivation Navigation in 3D worlds is awkward using traditional mouse Direct
DESIGN & CREATIVE TECHNOLOGIES FINAL EXAM TIMETABLE SEMESTER
 Wednesday 24 October DESIGN & CREATIVE TECHNOLOGIES FINAL EXAM TIMETABLE SEMESTER 2 2018 PHOTO ID IS REQUIRED FOR ALL EXAMINATIONS The Exam Timetable is subject to change, please check back regularly for
Wednesday 24 October DESIGN & CREATIVE TECHNOLOGIES FINAL EXAM TIMETABLE SEMESTER 2 2018 PHOTO ID IS REQUIRED FOR ALL EXAMINATIONS The Exam Timetable is subject to change, please check back regularly for
A CYBER PHYSICAL SYSTEMS APPROACH FOR ROBOTIC SYSTEMS DESIGN
 Proceedings of the Annual Symposium of the Institute of Solid Mechanics and Session of the Commission of Acoustics, SISOM 2015 Bucharest 21-22 May A CYBER PHYSICAL SYSTEMS APPROACH FOR ROBOTIC SYSTEMS
Proceedings of the Annual Symposium of the Institute of Solid Mechanics and Session of the Commission of Acoustics, SISOM 2015 Bucharest 21-22 May A CYBER PHYSICAL SYSTEMS APPROACH FOR ROBOTIC SYSTEMS
Autonomous and Autonomic Systems: With Applications to NASA Intelligent Spacecraft Operations and Exploration Systems
 Walt Truszkowski, Harold L. Hallock, Christopher Rouff, Jay Karlin, James Rash, Mike Hinchey, and Roy Sterritt Autonomous and Autonomic Systems: With Applications to NASA Intelligent Spacecraft Operations
Walt Truszkowski, Harold L. Hallock, Christopher Rouff, Jay Karlin, James Rash, Mike Hinchey, and Roy Sterritt Autonomous and Autonomic Systems: With Applications to NASA Intelligent Spacecraft Operations
1. PUBLISHABLE SUMMARY
 Ref. Ares(2018)3499528-02/07/2018 1. PUBLISHABLE SUMMARY Summary of the context and overall objectives of the project (For the final period, include the conclusions of the action) The AIDA-2020 project
Ref. Ares(2018)3499528-02/07/2018 1. PUBLISHABLE SUMMARY Summary of the context and overall objectives of the project (For the final period, include the conclusions of the action) The AIDA-2020 project
IBM Research Zurich. A Strategy of Open Innovation. Dr. Jana Koehler, Manager Business Integration Technologies. IBM Research Zurich
 IBM Research Zurich A Strategy of Open Innovation Dr., Manager Business Integration Technologies IBM A Century of Information Technology Founded in 1911 Among the leaders in the IT industry in every decade
IBM Research Zurich A Strategy of Open Innovation Dr., Manager Business Integration Technologies IBM A Century of Information Technology Founded in 1911 Among the leaders in the IT industry in every decade
COMPUTER SCIENCE AND ENGINEERING
 COMPUTER SCIENCE AND ENGINEERING Internet of Thing Cloud Computing Big Data Analytics Network Security Distributed System Image Processing Data Science Business Intelligence Wireless Sensor Network Artificial
COMPUTER SCIENCE AND ENGINEERING Internet of Thing Cloud Computing Big Data Analytics Network Security Distributed System Image Processing Data Science Business Intelligence Wireless Sensor Network Artificial
A novel solution for various monitoring applications at CERN
 A novel solution for various monitoring applications at CERN F. Lackner, P. H. Osanna 1, W. Riegler, H. Kopetz CERN, European Organisation for Nuclear Research, CH-1211 Geneva-23, Switzerland 1 Department
A novel solution for various monitoring applications at CERN F. Lackner, P. H. Osanna 1, W. Riegler, H. Kopetz CERN, European Organisation for Nuclear Research, CH-1211 Geneva-23, Switzerland 1 Department
CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM
 CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM Aniket D. Kulkarni *1, Dr.Sayyad Ajij D. *2 *1(Student of E&C Department, MIT Aurangabad, India) *2(HOD of E&C department, MIT Aurangabad, India) aniket2212@gmail.com*1,
CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM Aniket D. Kulkarni *1, Dr.Sayyad Ajij D. *2 *1(Student of E&C Department, MIT Aurangabad, India) *2(HOD of E&C department, MIT Aurangabad, India) aniket2212@gmail.com*1,
Intelligent interaction
 BionicWorkplace: autonomously learning workstation for human-machine collaboration Intelligent interaction Face to face, hand in hand. The BionicWorkplace shows the extent to which human-machine collaboration
BionicWorkplace: autonomously learning workstation for human-machine collaboration Intelligent interaction Face to face, hand in hand. The BionicWorkplace shows the extent to which human-machine collaboration
Physical Human Robot Interaction
 MIN Faculty Department of Informatics Physical Human Robot Interaction Intelligent Robotics Seminar Ilay Köksal University of Hamburg Faculty of Mathematics, Informatics and Natural Sciences Department
MIN Faculty Department of Informatics Physical Human Robot Interaction Intelligent Robotics Seminar Ilay Köksal University of Hamburg Faculty of Mathematics, Informatics and Natural Sciences Department
Strategy for Collaboration in Robot Soccer
 Strategy for Collaboration in Robot Soccer Sng H.L. 1, G. Sen Gupta 1 and C.H. Messom 2 1 Singapore Polytechnic, 500 Dover Road, Singapore {snghl, SenGupta }@sp.edu.sg 1 Massey University, Auckland, New
Strategy for Collaboration in Robot Soccer Sng H.L. 1, G. Sen Gupta 1 and C.H. Messom 2 1 Singapore Polytechnic, 500 Dover Road, Singapore {snghl, SenGupta }@sp.edu.sg 1 Massey University, Auckland, New
FACULTY OF MECHANICAL ENGINEERING.
 FACULTY OF MECHANICAL ENGINEERING www.sjf.tuke.sk History Establishment of the Košice University confirmed Emperor Leopold I. August 7, 1660 Golden Bull (Bulla Aurea) Governmental Decree No.30 / 1952 created
FACULTY OF MECHANICAL ENGINEERING www.sjf.tuke.sk History Establishment of the Košice University confirmed Emperor Leopold I. August 7, 1660 Golden Bull (Bulla Aurea) Governmental Decree No.30 / 1952 created
AUTOMATION & ROBOTICS LABORATORY. Faculty of Electronics and Telecommunications University of Engineering and Technology Vietnam National University
 AUTOMATION & ROBOTICS LABORATORY Faculty of Electronics and Telecommunications University of Engineering and Technology Vietnam National University Industrial Robot for Training ED7220 (Korea) SCORBOT
AUTOMATION & ROBOTICS LABORATORY Faculty of Electronics and Telecommunications University of Engineering and Technology Vietnam National University Industrial Robot for Training ED7220 (Korea) SCORBOT
Development of Robotic Machine Tool Towards Industrial Business. Huapeng Wu, Heikki Handroos Lappeenranta University of Technology
 Development of Robotic Machine Tool Towards Industrial Business Huapeng Wu, Heikki Handroos Lappeenranta University of Technology 1. Background Since 2000, the EFDA in EU has launched several tasks to
Development of Robotic Machine Tool Towards Industrial Business Huapeng Wu, Heikki Handroos Lappeenranta University of Technology 1. Background Since 2000, the EFDA in EU has launched several tasks to
Intuitive Vision Robot Kit For Efficient Education
 Intuitive Vision Robot Kit For Efficient Education OH SangHun a, CHO SungKu b, YU BaekWoon c, Ji Hyun Park d Yonsei University a & Kwangwoon University b Sanghun_oh@yonsei.ac.kr, pot1213@naver.com, bwrew2@gmail.com,
Intuitive Vision Robot Kit For Efficient Education OH SangHun a, CHO SungKu b, YU BaekWoon c, Ji Hyun Park d Yonsei University a & Kwangwoon University b Sanghun_oh@yonsei.ac.kr, pot1213@naver.com, bwrew2@gmail.com,
Laboratory of Advanced Simulations
 XXIX. ASR '2004 Seminar, Instruments and Control, Ostrava, April 30, 2004 333 Laboratory of Advanced Simulations WAGNEROVÁ, Renata Ing., Ph.D., Katedra ATŘ-352, VŠB-TU Ostrava, 17. listopadu, Ostrava -
XXIX. ASR '2004 Seminar, Instruments and Control, Ostrava, April 30, 2004 333 Laboratory of Advanced Simulations WAGNEROVÁ, Renata Ing., Ph.D., Katedra ATŘ-352, VŠB-TU Ostrava, 17. listopadu, Ostrava -
Design and Performance of the ATLAS Muon Detector Control System
 Design and Performance of the ATLAS Muon Detector Control System Alessandro Polini on behalf of the ATLAS Muon Collaboration INFN Bologna, via Irnerio 46, 40126 Bologna, I E-mail: alessandro.polini@bo.infn.it
Design and Performance of the ATLAS Muon Detector Control System Alessandro Polini on behalf of the ATLAS Muon Collaboration INFN Bologna, via Irnerio 46, 40126 Bologna, I E-mail: alessandro.polini@bo.infn.it
Current Technologies in Vehicular Communications
 Current Technologies in Vehicular Communications George Dimitrakopoulos George Bravos Current Technologies in Vehicular Communications George Dimitrakopoulos Department of Informatics and Telematics Harokopio
Current Technologies in Vehicular Communications George Dimitrakopoulos George Bravos Current Technologies in Vehicular Communications George Dimitrakopoulos Department of Informatics and Telematics Harokopio
Prof. Subramanian Ramamoorthy. The University of Edinburgh, Reader at the School of Informatics
 Prof. Subramanian Ramamoorthy The University of Edinburgh, Reader at the School of Informatics with Baxter there is a good simulator, a physical robot and easy to access public libraries means it s relatively
Prof. Subramanian Ramamoorthy The University of Edinburgh, Reader at the School of Informatics with Baxter there is a good simulator, a physical robot and easy to access public libraries means it s relatively
Software architectures for Industry 4.0 RAMI and IIRA from the perspective of projects under the AUTONOMICS for Industry 4.
 Software architectures for Industry 4.0 RAMI and IIRA from the perspective of projects under the AUTONOMICS for Industry 4.0 programme Bericht des Forschungsprojektes SoMaLI (Social Manufacturing and Logistics
Software architectures for Industry 4.0 RAMI and IIRA from the perspective of projects under the AUTONOMICS for Industry 4.0 programme Bericht des Forschungsprojektes SoMaLI (Social Manufacturing and Logistics
Cognitive Robotics 2017/2018
 Cognitive Robotics 2017/2018 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Cognitive Robotics 2017/2018 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Anatomic and Computational Pathology Diagnostic Artificial Intelligence at Scale
 Anatomic and Computational Pathology Diagnostic Artificial Intelligence at Scale John Gilbertson MD Department of Pathology Massachusetts General Hospital Partners Healthcare System Harvard Medical School
Anatomic and Computational Pathology Diagnostic Artificial Intelligence at Scale John Gilbertson MD Department of Pathology Massachusetts General Hospital Partners Healthcare System Harvard Medical School
 http://www.dtc.umn.edu Andrew Odlyzko, Director Jim Licari, Industrial Liaisons Michael Olesen, Facilities and Programs AO051903-1 Create, coordinate, and promote interdisciplinary digital technology Point
http://www.dtc.umn.edu Andrew Odlyzko, Director Jim Licari, Industrial Liaisons Michael Olesen, Facilities and Programs AO051903-1 Create, coordinate, and promote interdisciplinary digital technology Point
SPQR RoboCup 2016 Standard Platform League Qualification Report
 SPQR RoboCup 2016 Standard Platform League Qualification Report V. Suriani, F. Riccio, L. Iocchi, D. Nardi Dipartimento di Ingegneria Informatica, Automatica e Gestionale Antonio Ruberti Sapienza Università
SPQR RoboCup 2016 Standard Platform League Qualification Report V. Suriani, F. Riccio, L. Iocchi, D. Nardi Dipartimento di Ingegneria Informatica, Automatica e Gestionale Antonio Ruberti Sapienza Università
MODULAR TRAINING SYSTEM IN VIRTUAL REALITY ENVIRONMENT MSEVR
 automated and robotic system, robot, simulation, teaching, virtual reality Vladimír BALÁŽ, Marek VAGAŠ, Mikuláš HAJDUK *, Ján SEMJON MODULAR TRAINING SYSTEM IN VIRTUAL REALITY ENVIRONMENT MSEVR Abstract
automated and robotic system, robot, simulation, teaching, virtual reality Vladimír BALÁŽ, Marek VAGAŠ, Mikuláš HAJDUK *, Ján SEMJON MODULAR TRAINING SYSTEM IN VIRTUAL REALITY ENVIRONMENT MSEVR Abstract
Humanoid Robot NAO: Developing Behaviors for Football Humanoid Robots
 Humanoid Robot NAO: Developing Behaviors for Football Humanoid Robots State of the Art Presentation Luís Miranda Cruz Supervisors: Prof. Luis Paulo Reis Prof. Armando Sousa Outline 1. Context 1.1. Robocup
Humanoid Robot NAO: Developing Behaviors for Football Humanoid Robots State of the Art Presentation Luís Miranda Cruz Supervisors: Prof. Luis Paulo Reis Prof. Armando Sousa Outline 1. Context 1.1. Robocup
GTU- Centre of Excellence in Automation
 Gujarat Technological University Centre of Excellence in Automation LABS UNDER CENTER OF EXCELLENCE Hydraulic Lab. Pneumatic Lab. Sensor Lab. Programmable logic controller(plc) Robotics & Mechatronics
Gujarat Technological University Centre of Excellence in Automation LABS UNDER CENTER OF EXCELLENCE Hydraulic Lab. Pneumatic Lab. Sensor Lab. Programmable logic controller(plc) Robotics & Mechatronics
Robotics II DESCRIPTION. EXAM INFORMATION Items
 EXAM INFORMATION Items 37 Points 49 Prerequisites NONE Grade Level 10-12 Course Length ONE SEMESTER Career Cluster MANUFACTURING SCIENCE, TECHNOLOGY, ENGINEERING, AND MATHEMATICS Performance Standards
EXAM INFORMATION Items 37 Points 49 Prerequisites NONE Grade Level 10-12 Course Length ONE SEMESTER Career Cluster MANUFACTURING SCIENCE, TECHNOLOGY, ENGINEERING, AND MATHEMATICS Performance Standards
Cyber-Physical Systems and Intelligent Robotics Smart Engineering for Smart Factory
 Cyber-Physical Systems and Intelligent Robotics Smart Engineering for Smart Factory Professional Education Certificate Courses at the RWTH International Academy ggmbh Preface A progressive digitalisation
Cyber-Physical Systems and Intelligent Robotics Smart Engineering for Smart Factory Professional Education Certificate Courses at the RWTH International Academy ggmbh Preface A progressive digitalisation
Multi-Platform Soccer Robot Development System
 Multi-Platform Soccer Robot Development System Hui Wang, Han Wang, Chunmiao Wang, William Y. C. Soh Division of Control & Instrumentation, School of EEE Nanyang Technological University Nanyang Avenue,
Multi-Platform Soccer Robot Development System Hui Wang, Han Wang, Chunmiao Wang, William Y. C. Soh Division of Control & Instrumentation, School of EEE Nanyang Technological University Nanyang Avenue,
FRAUNHOFER INSTITUT FOR MANUFACTURING ENGINEERING AND AUTOMATION IPA DRIVE SYSTEMS AND EXOSKELETONS
 FRAUNHOFER INSTITUT FOR MANUFACTURING ENGINEERING AND AUTOMATION IPA DRIVE SYSTEMS AND EXOSKELETONS WHAT DRIVES US Mobility is a basic human need. As the demographic change continues, this is increasingly
FRAUNHOFER INSTITUT FOR MANUFACTURING ENGINEERING AND AUTOMATION IPA DRIVE SYSTEMS AND EXOSKELETONS WHAT DRIVES US Mobility is a basic human need. As the demographic change continues, this is increasingly
Automation and Mechatronics Engineering Program. Your Path Towards Success
 Automation and Mechatronics Engineering Program Your Path Towards Success What is Mechatronics? Mechatronics combines the principles of mechanical, computer, electronic, and control engineering into a
Automation and Mechatronics Engineering Program Your Path Towards Success What is Mechatronics? Mechatronics combines the principles of mechanical, computer, electronic, and control engineering into a
Data Quality Monitoring of the CMS Pixel Detector
 Data Quality Monitoring of the CMS Pixel Detector 1 * Purdue University Department of Physics, 525 Northwestern Ave, West Lafayette, IN 47906 USA E-mail: petra.merkel@cern.ch We present the CMS Pixel Data
Data Quality Monitoring of the CMS Pixel Detector 1 * Purdue University Department of Physics, 525 Northwestern Ave, West Lafayette, IN 47906 USA E-mail: petra.merkel@cern.ch We present the CMS Pixel Data
ESB LOGISTICS LEARNING FACTORY. Prof. Dr. Ing. Dipl.-Ing. (FH) Vera Hummel, Dipl.-Ing (FH) Beate Brenner
 Vera Hummel, Dipl.-Ing (FH) Beate Brenner") International Academy for Production Engineering 7t th Conference on Learning Factories, Darmstadt, Germany, April 4 th to 5 th 2017 ESB LOGISTICS LEARNING FACTORY Digital twin as enabler for a SMART FACTORY
International Academy for Production Engineering 7t th Conference on Learning Factories, Darmstadt, Germany, April 4 th to 5 th 2017 ESB LOGISTICS LEARNING FACTORY Digital twin as enabler for a SMART FACTORY
Space Research expeditions and open space work. Education & Research Teaching and laboratory facilities. Medical Assistance for people
 Space Research expeditions and open space work Education & Research Teaching and laboratory facilities. Medical Assistance for people Safety Life saving activity, guarding Military Use to execute missions
Space Research expeditions and open space work Education & Research Teaching and laboratory facilities. Medical Assistance for people Safety Life saving activity, guarding Military Use to execute missions
Cognitive Systems Monographs
 Cognitive Systems Monographs Volume 9 Editors: Rüdiger Dillmann Yoshihiko Nakamura Stefan Schaal David Vernon Heiko Hamann Space-Time Continuous Models of Swarm Robotic Systems Supporting Global-to-Local
Cognitive Systems Monographs Volume 9 Editors: Rüdiger Dillmann Yoshihiko Nakamura Stefan Schaal David Vernon Heiko Hamann Space-Time Continuous Models of Swarm Robotic Systems Supporting Global-to-Local
CONTROL OF LABORATORY MODEL BALL AND PLATE
 CONTROL OF LABORATORY MODEL BALL AND PLATE Dr. Ing. Vratislav Hladký Ing. Pavol Liščinský Department of Cybernetics and Artificial Intelligence, FEI, TU Košice Letná 9, 042 00 Košice, Slovak Republic e-mail:
CONTROL OF LABORATORY MODEL BALL AND PLATE Dr. Ing. Vratislav Hladký Ing. Pavol Liščinský Department of Cybernetics and Artificial Intelligence, FEI, TU Košice Letná 9, 042 00 Košice, Slovak Republic e-mail:
AVL X-ion. Adapts. Acquires. Inspires.
 AVL X-ion Adapts. Acquires. Inspires. THE CHALLENGE Facing ever more stringent emissions targets, the quest for an efficient and affordable powertrain leads invariably through complexity. On the one hand,
AVL X-ion Adapts. Acquires. Inspires. THE CHALLENGE Facing ever more stringent emissions targets, the quest for an efficient and affordable powertrain leads invariably through complexity. On the one hand,
PRODUCTS AND LAB SOLUTIONS
 PRODUCTS AND LAB SOLUTIONS Answering the most challenging academic questions with innovative technology and methods Quanser is the global leader in the design and manufacture of lab solutions and products
PRODUCTS AND LAB SOLUTIONS Answering the most challenging academic questions with innovative technology and methods Quanser is the global leader in the design and manufacture of lab solutions and products
Foreword The Internet of Things Threats and Opportunities of Improved Visibility
 Foreword The Internet of Things Threats and Opportunities of Improved Visibility The Internet has changed our business and private lives in the past years and continues to do so. The Web 2.0, social networks
Foreword The Internet of Things Threats and Opportunities of Improved Visibility The Internet has changed our business and private lives in the past years and continues to do so. The Web 2.0, social networks
Kid-Size Humanoid Soccer Robot Design by TKU Team
 Kid-Size Humanoid Soccer Robot Design by TKU Team Ching-Chang Wong, Kai-Hsiang Huang, Yueh-Yang Hu, and Hsiang-Min Chan Department of Electrical Engineering, Tamkang University Tamsui, Taipei, Taiwan E-mail:
Kid-Size Humanoid Soccer Robot Design by TKU Team Ching-Chang Wong, Kai-Hsiang Huang, Yueh-Yang Hu, and Hsiang-Min Chan Department of Electrical Engineering, Tamkang University Tamsui, Taipei, Taiwan E-mail:
Subjects taken at UC-MEng which are recognized for credit transfer to the respective PolyU-MSc
 Annex 1 Subjects taken at UC-MEng which are recognized for credit transfer to the respective PolyU-MSc Program: MSc Biomedical Engineering Equivalent subjects in UC MEng programs PolyU subjects contributed
Annex 1 Subjects taken at UC-MEng which are recognized for credit transfer to the respective PolyU-MSc Program: MSc Biomedical Engineering Equivalent subjects in UC MEng programs PolyU subjects contributed