FORMAL MODELING AND VERIFICATION OF MULTI-AGENTS SYSTEM USING WELL- FORMED NETS
|
|
|
- Sheena Martin
- 5 years ago
- Views:
Transcription
1 FORMAL MODELING AND VERIFICATION OF MULTI-AGENTS SYSTEM USING WELL- FORMED NETS Meriem Taibi 1 and Malika Ioualalen 1 1 LSI - USTHB - BP 32, El-Alia, Bab-Ezzouar, Alger, Algerie taibi,ioualalen@lsi-usthb.dz ABSTRACT Multi-agent systems are asynchronous and distributed computer systems. These characteristics make them also a discrete-event dynamic system. It is, therefore, important to analyze the behavior of such systems to ensure that they terminate correctly and satisfy other important properties. This paper presents a formal modeling and analysis of MAS, based on Well-formed Nets, in order to ensure the absence of any undesired or unexpected behavior. To validate our contribution, we consider the timetable problem, which is a multi-agent resource allocation problem. KEYWORDS Multi-agent system, Well-formed Nets, Model Checking. 1. INTRODUCTION The paradigm of multi-agent systems (MAS) [1] offers an original way of modeling complex system. Therefore, multi-agent systems have been used in several areas, such as telecommunications, finance, Internet, energy, health, embedded systems... etc. When designing MAS, it is often hard to guarantee the system specifications that have been designed, actually fulfil the requirements, i.e., whether it satisfies the design requirements, especially for critical applications. Tests and simulations have contributed for a long time to validate such systems. However, these techniques allow to investigate only one part of the global behavior. Thus, they differ from the formal verification techniques, which ensure that a property is verified by all possible system executions [2]. Consequently, it becomes crucial to have rigorous methods of formal specification and verification to ensure the safe development of agent based systems. These systems can be critical with no risk of error for some properties, such as security, integrity and robustness. Model checking techniques are widely used in analyzing MASs due to their completeness and automaton [3]. We have already presented in previous works an e-commerce multi-agent system modeling using Colored Petri Nets [4] [5], where some general properties verification was performed using CPN Tools [6].Unfortunately CPN Tools does not allow verification of specific properties. In addition it suffers from the so called state explosion problem: the number of states in the model grows David C. Wyld et al. (Eds) : ICAITA, CDKP, CMC, SOFT, SAI pp , CS & IT-CSCP 2016 DOI : /csit
2 26 Computer Science & Information Technology (CS & IT) exponentially. In this paper, we present an efficient formal approach for modeling and verifying multi-agent systems, based on Well-formed Nets (WN) and model checking verification using GreatSPN [7] and SPOT [8] tools. The main advantage of Well Formed Nets is the notion of symbolic reachability graph that is composed of symbolic states. A symbolic state is a state representing several concrete states in the state space of the system described by the Petri net. So, much larger state spaces can be represented. Indeed, we present the Agent by class of color and his actions by transition associated by one or by several conditions. We study in particular the interaction protocols. Interaction protocols enable agents to reach a solution in a quicker way. The agents know the messages they can receive in a given state, the message they can send and the rules that guide their choice in case of non-determinism. The agents thus go faster towards solution. As case study, we take FIPA contract net protocol applied to timetable problem. The timetabling problem is a resource allocation problem. It aims at finding an appropriate timetable for a set of courses to be scheduled within limited resources such as professors, student groups and class time. There are generally two types of constraints in timetabling: hard and soft constraints. Hard constraints are those that must be satisfied and cannot be violated. For example, a professor can't give two courses at the same time to two different groups. Soft constraints are those that are preferably satisfied, but may be relaxed if necessary in order to meet hard constraints. For reasons of simplification we are interested by the verification of the hard properties which are expressed by the temporal logic used in this work. We begin by defining some atomic propositions that will help us to translate timetabling properties into LTL formula. This paper is organized as follows. Related work are presented in Section 2. Section 3 details the analysed system and the proposed models. Section 4 describes the verification of the desirable properties and experimental results. Finally, we conclude our paper by giving some perspectives in Section RELATED WORK Petri Nets (PN) have been successfully used in several areas for the modeling and analysis of distributed systems [9]. Several studies have been proposed to model MAS with Petri Nets. Balague [10], proposed a model for a promotional game of viral marketing on the Internet. She used Stochastic Petri Nets for modeling a multi-agent wish list. Gazdare [11] used Colored Petri Nets (CPN) as a formal method to model a transport MAS with containers, then, simulated and solved the storage problem. Lyu [12] used a Stochastic Petri Net (SPN) model to assess survivability and fault tolerance of mobile agents systems. They use the model for design and evaluation of their proposed agent architecture through simulation. EL Fallah-Seghrouchni [13], Boukredera [14] and Khosravifar [15] proposed to use the CPN formalism to model interaction protocols. These Petri Net-based approaches provided a MAS's specification to facilitate applications design and implementation. However, they did not address the verification problem of the proposed models. The advantages of having a Petri net model were not exploited. The work presented by Hsieh in [16] proposed a new model called a collaborative Petri net and addressed the question of deadlock and undesirable state avoidance under the contract net protocol. Other Petri Net extensions were proposed in more recent works. [17] defined nested predicate transition nets to analyze multi-agent system and a set of translation
3 Computer Science & Information Technology (CS & IT) 27 rules that translate the multi-agent model to an executable PROMELA model [18]. Marzougui in [19] proposed an Agent Petri Net to model interactions between agents. The transformation of the obtained model, in an ordinary Petri Net, is also required to analyze the behavioral properties of the system. Recently, model checking techniques are widely used in analyzing MASs due to their completeness and automaton. So several model checker are proposed for modelling and verifying critical properties of MASs, e.g., MCMAS [20], MCK[21], SPIN [2] and NuSMV [20]. These approaches, however, still have some limitations. Specifically, MCMAS and MCK mainly focus on concurrent systems without stochastic behaviors, which limits their application in unreliable environments or agents with random behaviors. In our work, we use a formal model, based on Well formed Nets, a class of high level Petri Nets, allowing qualitative analysis together with performance evaluation. This special class of high level Petri nets, allows to express symmetrical behaviours, which generates more compact state space. 3. MODELING MULTI-AGENT INTERACTIONS USING WN An agent is an active and autonomous entity, it perceives its environment and interacts with other agents to achieve its goal. The communication between agents can be structured by the use of protocols, structured descriptions of possible interactions between two or more agents. Protocols are a formalization of processes, which allow the organization of recurring tasks. Several protocols have been proposed (see for instance the proposal of FIPA 1 ). 3.1 FIPA contract net protocol The contract net protocol [22] is an elementary protocol that facilitates task allocation between a group of agents' roles. In this protocol, there are two different types of roles, an Initiator and a Participant. The finite automata in Fig.1 and Fig. 2 model the different states and transitions of these roles. The Interaction Protocol is composed of a sequence of four main steps, illustrated by the sequence diagrams shown in Fig. 3. The agents must go through the following loop of steps to negotiate each contract. 1. The Initiator sends a "call for proposal" (CFP). 2. Participants who receive the announcement can answer by either a Proposal or reject. 3. Initiator receives and evaluates proposals, it sends a Contract to participant agents, whose proposals are accepted, and Refuse to other agents. 4. At the end of interaction, the participant sends to the initiator agent, an Inform message to confirm the action achieving, or a failure message in a failure case. 1 FIPA: The Foundation for Intelligent Physical Agents
4 28 Computer Science & Information Technology (CS & IT) Fig. 1. Initiator automaton Fig. 2. Participant automaton
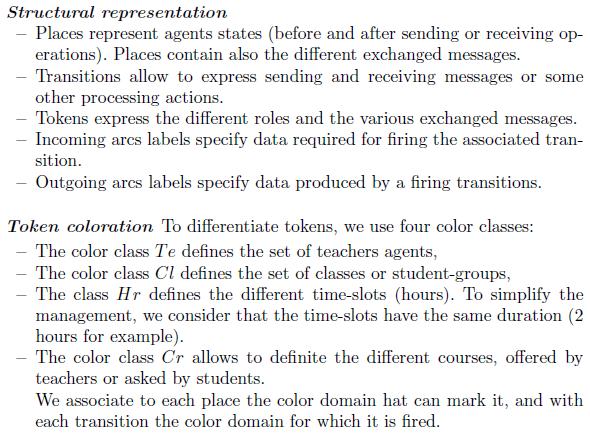
5 Computer Science & Information Technology (CS & IT) The Well formed Petri Nets (WN) Fig. 3. FIPA Contract-Net Sequence Diagram As mentioned in the introduction, our method is based on the Well-Formed Petri nets. Petri Nets are state based models which are well known for being able to model complex systems with concurrency and conflicts, even in the stochastic context. Moreover, WN model can also take advantage of behaviourial symmetries of systems' entities, if there are such symmetries. Finally, WNs are a well studied class of high level colored Petri nets and benefit from a large set of analysis algorithms and tools A Well-formed Net [23] is a colored Petri net, where places and transitions are provided with a structured type of tokens. In this model, tokens are grouped into basic classes called color classes. These classes are brought together to form a color domain, which is associated to places and transitions. Colors of a place label its tokens, whereas colors of a transition define possible firings of the transition. Thus, an initial marking of a place is defined as a multiset (bag) of colored tokens. A color function is attached to each arc: its role is to define for, a given color of the associated transition, the number of colored tokens to add or to remove from the attached place. A color domain is a Cartesian product of color classes. A total order, expressed by a successor function, can be defined on a color class. The Cartesian product defining a color domain can be empty (for example, in the case of a place containing neutral tokens). It can also contain repetition of a class (modelling internal synchronization of this class). A color class, grouping colors of same nature (eg. processes, resources), can be divided into static sub-classes, where a sub-class contains colors with identical behaviours, even in terms of performance.



6 30 Computer Science & Information Technology (CS & IT) 3.3 Case study: Timetabling management benchmark

7 Computer Science & Information Technology (CS & IT) 31
 Fig. 4.")
8 32 Computer Science & Information Technology (CS & IT) Fig. 4. The MAS model

 33 4.")

9 Computer Science & Information Technology (CS & IT) EXPERIMENTAL RESULTS 4.1 Properties verification




10 34 Computer Science & Information Technology (CS & IT) 4.2 State Space Analysis Results Fig. 5. Property verification



11 Computer Science & Information Technology (CS & IT) CONCLUSION AND FUTURE WORKS
")
12 36 Computer Science & Information Technology (CS & IT) REFERENCES
13 Computer Science & Information Technology (CS & IT) 37
14 38 Computer Science & Information Technology (CS & IT)
Where are we? Knowledge Engineering Semester 2, Speech Act Theory. Categories of Agent Interaction
 H T O F E E U D N I I N V E B R U S R I H G Knowledge Engineering Semester 2, 2004-05 Michael Rovatsos mrovatso@inf.ed.ac.uk Lecture 12 Agent Interaction & Communication 22th February 2005 T Y Where are
H T O F E E U D N I I N V E B R U S R I H G Knowledge Engineering Semester 2, 2004-05 Michael Rovatsos mrovatso@inf.ed.ac.uk Lecture 12 Agent Interaction & Communication 22th February 2005 T Y Where are
the gamedesigninitiative at cornell university Lecture 4 Game Grammars
 Lecture 4 Sources for Today s Talk Raph Koster (one of original proponents) Theory of Fun, 10 Years Later (GDCOnline 2012) http://raphkoster.com Ernest Adams and Joris Dormans Game Mechanics: Advanced
Lecture 4 Sources for Today s Talk Raph Koster (one of original proponents) Theory of Fun, 10 Years Later (GDCOnline 2012) http://raphkoster.com Ernest Adams and Joris Dormans Game Mechanics: Advanced
Sensor Robot Planning in Incomplete Environment
 Journal of Software Engineering and Applications, 2011, 4, 156-160 doi:10.4236/jsea.2011.43017 Published Online March 2011 (http://www.scirp.org/journal/jsea) Shan Zhong 1, Zhihua Yin 2, Xudong Yin 1,
Journal of Software Engineering and Applications, 2011, 4, 156-160 doi:10.4236/jsea.2011.43017 Published Online March 2011 (http://www.scirp.org/journal/jsea) Shan Zhong 1, Zhihua Yin 2, Xudong Yin 1,
AGENTS AND AGREEMENT TECHNOLOGIES: THE NEXT GENERATION OF DISTRIBUTED SYSTEMS
 AGENTS AND AGREEMENT TECHNOLOGIES: THE NEXT GENERATION OF DISTRIBUTED SYSTEMS Vicent J. Botti Navarro Grupo de Tecnología Informática- Inteligencia Artificial Departamento de Sistemas Informáticos y Computación
AGENTS AND AGREEMENT TECHNOLOGIES: THE NEXT GENERATION OF DISTRIBUTED SYSTEMS Vicent J. Botti Navarro Grupo de Tecnología Informática- Inteligencia Artificial Departamento de Sistemas Informáticos y Computación
An Integrated Modeling and Simulation Methodology for Intelligent Systems Design and Testing
 An Integrated ing and Simulation Methodology for Intelligent Systems Design and Testing Xiaolin Hu and Bernard P. Zeigler Arizona Center for Integrative ing and Simulation The University of Arizona Tucson,
An Integrated ing and Simulation Methodology for Intelligent Systems Design and Testing Xiaolin Hu and Bernard P. Zeigler Arizona Center for Integrative ing and Simulation The University of Arizona Tucson,
Pervasive Services Engineering for SOAs
 Pervasive Services Engineering for SOAs Dhaminda Abeywickrama (supervised by Sita Ramakrishnan) Clayton School of Information Technology, Monash University, Australia dhaminda.abeywickrama@infotech.monash.edu.au
Pervasive Services Engineering for SOAs Dhaminda Abeywickrama (supervised by Sita Ramakrishnan) Clayton School of Information Technology, Monash University, Australia dhaminda.abeywickrama@infotech.monash.edu.au
Stanford Center for AI Safety
 Stanford Center for AI Safety Clark Barrett, David L. Dill, Mykel J. Kochenderfer, Dorsa Sadigh 1 Introduction Software-based systems play important roles in many areas of modern life, including manufacturing,
Stanford Center for AI Safety Clark Barrett, David L. Dill, Mykel J. Kochenderfer, Dorsa Sadigh 1 Introduction Software-based systems play important roles in many areas of modern life, including manufacturing,
Improved Model Generation of AMS Circuits for Formal Verification
 Improved Generation of AMS Circuits for Formal Verification Dhanashree Kulkarni, Satish Batchu, Chris Myers University of Utah Abstract Recently, formal verification has had success in rigorously checking
Improved Generation of AMS Circuits for Formal Verification Dhanashree Kulkarni, Satish Batchu, Chris Myers University of Utah Abstract Recently, formal verification has had success in rigorously checking
Conflict Management in Multiagent Robotic System: FSM and Fuzzy Logic Approach
 Conflict Management in Multiagent Robotic System: FSM and Fuzzy Logic Approach Witold Jacak* and Stephan Dreiseitl" and Karin Proell* and Jerzy Rozenblit** * Dept. of Software Engineering, Polytechnic
Conflict Management in Multiagent Robotic System: FSM and Fuzzy Logic Approach Witold Jacak* and Stephan Dreiseitl" and Karin Proell* and Jerzy Rozenblit** * Dept. of Software Engineering, Polytechnic
UNIVERSITY OF TWENTE. Guard-based Partial-Order Reduction in LTSmin. Formal Methods & Tools.
 UNIVERSITY OF TWENTE. Formal Methods & Tools. Guard-based Partial-Order Reduction in LTSmin Alfons Laarman, Elwin Pater, Jaco van de Pol, Michael Weber 8 july 2013 SPIN 13, Stony Brook LTSmin Tool Architecture
UNIVERSITY OF TWENTE. Formal Methods & Tools. Guard-based Partial-Order Reduction in LTSmin Alfons Laarman, Elwin Pater, Jaco van de Pol, Michael Weber 8 july 2013 SPIN 13, Stony Brook LTSmin Tool Architecture
CS 354R: Computer Game Technology
 CS 354R: Computer Game Technology Introduction to Game AI Fall 2018 What does the A stand for? 2 What is AI? AI is the control of every non-human entity in a game The other cars in a car game The opponents
CS 354R: Computer Game Technology Introduction to Game AI Fall 2018 What does the A stand for? 2 What is AI? AI is the control of every non-human entity in a game The other cars in a car game The opponents
Mirror Models for Pervasive Computing: Just-in-Time Reasoning about Device Ecologies
 1 Mirror Models for Pervasive Computing: Just-in-Time Reasoning about Device Ecologies Seng W. Loke, 1 Sucha Smanchat, 2 Sea Ling, 2 Maria Indrawan 2 La Trobe University, 1 Department of Computer Science
1 Mirror Models for Pervasive Computing: Just-in-Time Reasoning about Device Ecologies Seng W. Loke, 1 Sucha Smanchat, 2 Sea Ling, 2 Maria Indrawan 2 La Trobe University, 1 Department of Computer Science
Methodology for Agent-Oriented Software
 ب.ظ 03:55 1 of 7 2006/10/27 Next: About this document... Methodology for Agent-Oriented Software Design Principal Investigator dr. Frank S. de Boer (frankb@cs.uu.nl) Summary The main research goal of this
ب.ظ 03:55 1 of 7 2006/10/27 Next: About this document... Methodology for Agent-Oriented Software Design Principal Investigator dr. Frank S. de Boer (frankb@cs.uu.nl) Summary The main research goal of this
5.1 State-Space Search Problems
 Foundations of Artificial Intelligence March 7, 2018 5. State-Space Search: State Spaces Foundations of Artificial Intelligence 5. State-Space Search: State Spaces Malte Helmert University of Basel March
Foundations of Artificial Intelligence March 7, 2018 5. State-Space Search: State Spaces Foundations of Artificial Intelligence 5. State-Space Search: State Spaces Malte Helmert University of Basel March
Pure Versus Applied Informatics
 Pure Versus Applied Informatics A. J. Cowling Department of Computer Science University of Sheffield Structure of Presentation Introduction The structure of mathematics as a discipline. Analysing Pure
Pure Versus Applied Informatics A. J. Cowling Department of Computer Science University of Sheffield Structure of Presentation Introduction The structure of mathematics as a discipline. Analysing Pure
A Multi-agent System for Knowledge Management based on the Implicit Culture Framework
 A Multi-agent System for Knowledge Management based on the Implicit Culture Framework Enrico Blanzieri 1, Paolo Giorgini 1, Fausto Giunchiglia 1, and Claudio Zanoni 1 Department of Information and Communication
A Multi-agent System for Knowledge Management based on the Implicit Culture Framework Enrico Blanzieri 1, Paolo Giorgini 1, Fausto Giunchiglia 1, and Claudio Zanoni 1 Department of Information and Communication
A Tool for the Synthesis of Asynchronous Speed- Independent Circuits
 A Tool for the Synthesis of Asynchronous Speed- Independent Circuits Ondrej Gallo, Tomáš Nečas, Fedor Lehocki Faculty of Electrical Engineering and Information Technology, Slovak University of Technology,
A Tool for the Synthesis of Asynchronous Speed- Independent Circuits Ondrej Gallo, Tomáš Nečas, Fedor Lehocki Faculty of Electrical Engineering and Information Technology, Slovak University of Technology,
Application of Object Petri Net in the Modeling and Evaluation of Information Superiority
 2nd International Conference on Electrical, Computer Engineering and Electronics (ICECEE 2015) Application of Object Petri Net in the Modeling and Evaluation of Information Superiority LU Cong 1, a, LING
2nd International Conference on Electrical, Computer Engineering and Electronics (ICECEE 2015) Application of Object Petri Net in the Modeling and Evaluation of Information Superiority LU Cong 1, a, LING
This list supersedes the one published in the November 2002 issue of CR.
 PERIODICALS RECEIVED This is the current list of periodicals received for review in Reviews. International standard serial numbers (ISSNs) are provided to facilitate obtaining copies of articles or subscriptions.
PERIODICALS RECEIVED This is the current list of periodicals received for review in Reviews. International standard serial numbers (ISSNs) are provided to facilitate obtaining copies of articles or subscriptions.
Examining the CARA Specification. Elsa L Gunter, Yi Meng NJIT
 Examining the CARA Specification Elsa L Gunter, Yi Meng NJIT Capturing Tagged Req As LTL Spec Goal: Express tagged requirements as LTL formulae to enable model checking LTL not expressive enough, so we
Examining the CARA Specification Elsa L Gunter, Yi Meng NJIT Capturing Tagged Req As LTL Spec Goal: Express tagged requirements as LTL formulae to enable model checking LTL not expressive enough, so we
Agent-Based Systems. Agent-Based Systems. Agent-Based Systems. Five pervasive trends in computing history. Agent-Based Systems. Agent-Based Systems
 Five pervasive trends in computing history Michael Rovatsos mrovatso@inf.ed.ac.uk Lecture 1 Introduction Ubiquity Cost of processing power decreases dramatically (e.g. Moore s Law), computers used everywhere
Five pervasive trends in computing history Michael Rovatsos mrovatso@inf.ed.ac.uk Lecture 1 Introduction Ubiquity Cost of processing power decreases dramatically (e.g. Moore s Law), computers used everywhere
Negotiation Process Modelling in Virtual Environment for Enterprise Management
 Association for Information Systems AIS Electronic Library (AISeL) AMCIS 2006 Proceedings Americas Conference on Information Systems (AMCIS) December 2006 Negotiation Process Modelling in Virtual Environment
Association for Information Systems AIS Electronic Library (AISeL) AMCIS 2006 Proceedings Americas Conference on Information Systems (AMCIS) December 2006 Negotiation Process Modelling in Virtual Environment
TRUST-BASED CONTROL AND MOTION PLANNING FOR MULTI-ROBOT SYSTEMS WITH A HUMAN-IN-THE-LOOP
 TRUST-BASED CONTROL AND MOTION PLANNING FOR MULTI-ROBOT SYSTEMS WITH A HUMAN-IN-THE-LOOP Yue Wang, Ph.D. Warren H. Owen - Duke Energy Assistant Professor of Engineering Interdisciplinary & Intelligent
TRUST-BASED CONTROL AND MOTION PLANNING FOR MULTI-ROBOT SYSTEMS WITH A HUMAN-IN-THE-LOOP Yue Wang, Ph.D. Warren H. Owen - Duke Energy Assistant Professor of Engineering Interdisciplinary & Intelligent
Asynchronous Best-Reply Dynamics
 Asynchronous Best-Reply Dynamics Noam Nisan 1, Michael Schapira 2, and Aviv Zohar 2 1 Google Tel-Aviv and The School of Computer Science and Engineering, The Hebrew University of Jerusalem, Israel. 2 The
Asynchronous Best-Reply Dynamics Noam Nisan 1, Michael Schapira 2, and Aviv Zohar 2 1 Google Tel-Aviv and The School of Computer Science and Engineering, The Hebrew University of Jerusalem, Israel. 2 The
Model-Based Testing. CSCE Lecture 18-03/29/2018
 Model-Based Testing CSCE 747 - Lecture 18-03/29/2018 Creating Requirements-Based Tests Write Testable Specifications Produce clear, detailed, and testable requirements. Identify Independently Testable
Model-Based Testing CSCE 747 - Lecture 18-03/29/2018 Creating Requirements-Based Tests Write Testable Specifications Produce clear, detailed, and testable requirements. Identify Independently Testable
A Paradigm for Dynamic Coordination of Multiple Robots
 A Paradigm for Dynamic Coordination of Multiple Robots Luiz Chaimowicz 1,2, Vijay Kumar 1 and Mario F. M. Campos 2 1 GRASP Laboratory University of Pennsylvania, Philadelphia, PA, USA, 19104 2 DCC Universidade
A Paradigm for Dynamic Coordination of Multiple Robots Luiz Chaimowicz 1,2, Vijay Kumar 1 and Mario F. M. Campos 2 1 GRASP Laboratory University of Pennsylvania, Philadelphia, PA, USA, 19104 2 DCC Universidade
R2U2 in Space: System & Software Health Management for Small Satellites
 R2U2 in Space: System & Software Health Management for Small Satellites Kristin Yvonne Rozier, Iowa State University Joint work with Johann Schumann (SGT/NASA Ames) December 15, 2016 A Recent Motivation...
R2U2 in Space: System & Software Health Management for Small Satellites Kristin Yvonne Rozier, Iowa State University Joint work with Johann Schumann (SGT/NASA Ames) December 15, 2016 A Recent Motivation...
SENG609.22: Agent-Based Software Engineering Assignment. Agent-Oriented Engineering Survey
 SENG609.22: Agent-Based Software Engineering Assignment Agent-Oriented Engineering Survey By: Allen Chi Date:20 th December 2002 Course Instructor: Dr. Behrouz H. Far 1 0. Abstract Agent-Oriented Software
SENG609.22: Agent-Based Software Engineering Assignment Agent-Oriented Engineering Survey By: Allen Chi Date:20 th December 2002 Course Instructor: Dr. Behrouz H. Far 1 0. Abstract Agent-Oriented Software
Modeling Supervisory Control of Autonomous Mobile Robots using Graph Theory, Automata and Z Notation
 Modeling Supervisory Control of Autonomous Mobile Robots using Graph Theory, Automata and Z Notation Javed Iqbal 1, Sher Afzal Khan 2, Nazir Ahmad Zafar 3 and Farooq Ahmad 1 1 Faculty of Information Technology,
Modeling Supervisory Control of Autonomous Mobile Robots using Graph Theory, Automata and Z Notation Javed Iqbal 1, Sher Afzal Khan 2, Nazir Ahmad Zafar 3 and Farooq Ahmad 1 1 Faculty of Information Technology,
A review of Reasoning About Rational Agents by Michael Wooldridge, MIT Press Gordon Beavers and Henry Hexmoor
 A review of Reasoning About Rational Agents by Michael Wooldridge, MIT Press 2000 Gordon Beavers and Henry Hexmoor Reasoning About Rational Agents is concerned with developing practical reasoning (as contrasted
A review of Reasoning About Rational Agents by Michael Wooldridge, MIT Press 2000 Gordon Beavers and Henry Hexmoor Reasoning About Rational Agents is concerned with developing practical reasoning (as contrasted
A Mechanism for Dynamic Coordination of Multiple Robots
 University of Pennsylvania ScholarlyCommons Departmental Papers (MEAM) Department of Mechanical Engineering & Applied Mechanics July 2004 A Mechanism for Dynamic Coordination of Multiple Robots Luiz Chaimowicz
University of Pennsylvania ScholarlyCommons Departmental Papers (MEAM) Department of Mechanical Engineering & Applied Mechanics July 2004 A Mechanism for Dynamic Coordination of Multiple Robots Luiz Chaimowicz
Data Flow Modelling. Fault Tolerant Systems Research Group. Budapest University of Technology and Economics
 Data Flow Modelling Budapest University of Technology and Economics Fault Tolerant Systems Research Group Budapest University of Technology and Economics Department of Measurement and Information Systems
Data Flow Modelling Budapest University of Technology and Economics Fault Tolerant Systems Research Group Budapest University of Technology and Economics Department of Measurement and Information Systems
A Formal Model for Situated Multi-Agent Systems
 Fundamenta Informaticae 63 (2004) 1 34 1 IOS Press A Formal Model for Situated Multi-Agent Systems Danny Weyns and Tom Holvoet AgentWise, DistriNet Department of Computer Science K.U.Leuven, Belgium danny.weyns@cs.kuleuven.ac.be
Fundamenta Informaticae 63 (2004) 1 34 1 IOS Press A Formal Model for Situated Multi-Agent Systems Danny Weyns and Tom Holvoet AgentWise, DistriNet Department of Computer Science K.U.Leuven, Belgium danny.weyns@cs.kuleuven.ac.be
SPQR RoboCup 2016 Standard Platform League Qualification Report
 SPQR RoboCup 2016 Standard Platform League Qualification Report V. Suriani, F. Riccio, L. Iocchi, D. Nardi Dipartimento di Ingegneria Informatica, Automatica e Gestionale Antonio Ruberti Sapienza Università
SPQR RoboCup 2016 Standard Platform League Qualification Report V. Suriani, F. Riccio, L. Iocchi, D. Nardi Dipartimento di Ingegneria Informatica, Automatica e Gestionale Antonio Ruberti Sapienza Università
Technical-oriented talk about the principles and benefits of the ASSUMEits approach and tooling
 PROPRIETARY RIGHTS STATEMENT THIS DOCUMENT CONTAINS INFORMATION, WHICH IS PROPRIETARY TO THE ASSUME CONSORTIUM. NEITHER THIS DOCUMENT NOR THE INFORMATION CONTAINED HEREIN SHALL BE USED, DUPLICATED OR COMMUNICATED
PROPRIETARY RIGHTS STATEMENT THIS DOCUMENT CONTAINS INFORMATION, WHICH IS PROPRIETARY TO THE ASSUME CONSORTIUM. NEITHER THIS DOCUMENT NOR THE INFORMATION CONTAINED HEREIN SHALL BE USED, DUPLICATED OR COMMUNICATED
Research on the Mechanism of Net-based Collaborative Product Design
 2016 International Conference on Manufacturing Science and Information Engineering (ICMSIE 2016) ISBN: 978-1-60595-325-0 Research on the Mechanism of Net-based Collaborative Product Design QINHUA GUO and
2016 International Conference on Manufacturing Science and Information Engineering (ICMSIE 2016) ISBN: 978-1-60595-325-0 Research on the Mechanism of Net-based Collaborative Product Design QINHUA GUO and
William Milam Ford Motor Co
 Sharing technology for a stronger America Verification Challenges in Automotive Embedded Systems William Milam Ford Motor Co Chair USCAR CPS Task Force 10/20/2011 What is USCAR? The United States Council
Sharing technology for a stronger America Verification Challenges in Automotive Embedded Systems William Milam Ford Motor Co Chair USCAR CPS Task Force 10/20/2011 What is USCAR? The United States Council
Design Strategy for a Pipelined ADC Employing Digital Post-Correction
 Design Strategy for a Pipelined ADC Employing Digital Post-Correction Pieter Harpe, Athon Zanikopoulos, Hans Hegt and Arthur van Roermund Technische Universiteit Eindhoven, Mixed-signal Microelectronics
Design Strategy for a Pipelined ADC Employing Digital Post-Correction Pieter Harpe, Athon Zanikopoulos, Hans Hegt and Arthur van Roermund Technische Universiteit Eindhoven, Mixed-signal Microelectronics
Using Reactive Deliberation for Real-Time Control of Soccer-Playing Robots
 Using Reactive Deliberation for Real-Time Control of Soccer-Playing Robots Yu Zhang and Alan K. Mackworth Department of Computer Science, University of British Columbia, Vancouver B.C. V6T 1Z4, Canada,
Using Reactive Deliberation for Real-Time Control of Soccer-Playing Robots Yu Zhang and Alan K. Mackworth Department of Computer Science, University of British Columbia, Vancouver B.C. V6T 1Z4, Canada,
Organising LTL Monitors over Systems with a Global Clock
 Organising LTL Monitors over Systems with a Global Clock Yliès Falcone joint work with Andreas Bauer (NICTA Canberra, Australia) and Christian Colombo (U of Malta, Malta) Univ. Grenoble Alpes, Inria, Laboratoire
Organising LTL Monitors over Systems with a Global Clock Yliès Falcone joint work with Andreas Bauer (NICTA Canberra, Australia) and Christian Colombo (U of Malta, Malta) Univ. Grenoble Alpes, Inria, Laboratoire
Catholijn M. Jonker and Jan Treur Vrije Universiteit Amsterdam, Department of Artificial Intelligence, Amsterdam, The Netherlands
 INTELLIGENT AGENTS Catholijn M. Jonker and Jan Treur Vrije Universiteit Amsterdam, Department of Artificial Intelligence, Amsterdam, The Netherlands Keywords: Intelligent agent, Website, Electronic Commerce
INTELLIGENT AGENTS Catholijn M. Jonker and Jan Treur Vrije Universiteit Amsterdam, Department of Artificial Intelligence, Amsterdam, The Netherlands Keywords: Intelligent agent, Website, Electronic Commerce
Applying Open Architecture Concepts to Mission and Ship Systems
 Applying Open Architecture Concepts to Mission and Ship Systems John M. Green Gregory Miller Senior Lecturer Lecturer Department of Systems Engineering Introduction Purpose: to introduce a simulation based
Applying Open Architecture Concepts to Mission and Ship Systems John M. Green Gregory Miller Senior Lecturer Lecturer Department of Systems Engineering Introduction Purpose: to introduce a simulation based
SYNTHESIZING AND SPECIFYING ARCHITECTURES FOR SYSTEM OF SYSTEMS
 SYSTEM OF SYSTEMS ENGINEERING COLLABORATORS INFORMATION EXCHANGE (SOSECIE) SYNTHESIZING AND SPECIFYING ARCHITECTURES FOR SYSTEM OF SYSTEMS 28 APRIL 2015 C. Robert Kenley, PhD, ESEP Associate Professor
SYSTEM OF SYSTEMS ENGINEERING COLLABORATORS INFORMATION EXCHANGE (SOSECIE) SYNTHESIZING AND SPECIFYING ARCHITECTURES FOR SYSTEM OF SYSTEMS 28 APRIL 2015 C. Robert Kenley, PhD, ESEP Associate Professor
CARMA: Complete Autonomous Responsible Management Agent (System)
") University of Technology, Sydney Faculty of Engineering and Information Technology CARMA: Complete Autonomous Responsible Management Agent (System) Submitted by: Haydn Mearns BE (Soft.) 2012 Principal
University of Technology, Sydney Faculty of Engineering and Information Technology CARMA: Complete Autonomous Responsible Management Agent (System) Submitted by: Haydn Mearns BE (Soft.) 2012 Principal
Distributed Synthesis of Control Protocols for Smart Camera Networks
 Distributed Synthesis of Control Protocols for Smart Camera Networks Necmiye Ozay, Ufuk Topcu, Tichakorn Wongpiromsarn and Richard M Murray last updated on March 10, 2011 Abstract We considered the problem
Distributed Synthesis of Control Protocols for Smart Camera Networks Necmiye Ozay, Ufuk Topcu, Tichakorn Wongpiromsarn and Richard M Murray last updated on March 10, 2011 Abstract We considered the problem
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT
 MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
Fuzzy logic controller for traffic signal controller unit system and modeling with colored petri net
 Fuzzy logic controller for traffic signal controller unit system and modeling with colored petri net Behnam Barzegar Department of Computer Engineering, Islamic Azad University, Nowshahr Branch, Nowshahr,
Fuzzy logic controller for traffic signal controller unit system and modeling with colored petri net Behnam Barzegar Department of Computer Engineering, Islamic Azad University, Nowshahr Branch, Nowshahr,
Cyber-Physical Systems Design: Foundations, Methods, and Integrated Tool Chains.
 Cyber-Physical Systems Design: Foundations, Methods, and Integrated Tool Chains John.Fitzgerald@ncl.ac.uk Carl Gamble, Peter Gorm Larsen, Ken Pierce, Jim Woodcock 1 2008-2012: Industry deployment of advanced
Cyber-Physical Systems Design: Foundations, Methods, and Integrated Tool Chains John.Fitzgerald@ncl.ac.uk Carl Gamble, Peter Gorm Larsen, Ken Pierce, Jim Woodcock 1 2008-2012: Industry deployment of advanced
SOFT 437. Software Performance Analysis. What is UML? UML Tutorial
 SOFT 437 Software Performance Analysis UML Tutorial What is UML? Unified Modeling Language (UML) is a standard language for specifying, visualizing, constructing, and documenting the artifacts for software
SOFT 437 Software Performance Analysis UML Tutorial What is UML? Unified Modeling Language (UML) is a standard language for specifying, visualizing, constructing, and documenting the artifacts for software
An Ontology for Modelling Security: The Tropos Approach
 An Ontology for Modelling Security: The Tropos Approach Haralambos Mouratidis 1, Paolo Giorgini 2, Gordon Manson 1 1 University of Sheffield, Computer Science Department, UK {haris, g.manson}@dcs.shef.ac.uk
An Ontology for Modelling Security: The Tropos Approach Haralambos Mouratidis 1, Paolo Giorgini 2, Gordon Manson 1 1 University of Sheffield, Computer Science Department, UK {haris, g.manson}@dcs.shef.ac.uk
AN AUTONOMOUS SIMULATION BASED SYSTEM FOR ROBOTIC SERVICES IN PARTIALLY KNOWN ENVIRONMENTS
 AN AUTONOMOUS SIMULATION BASED SYSTEM FOR ROBOTIC SERVICES IN PARTIALLY KNOWN ENVIRONMENTS Eva Cipi, PhD in Computer Engineering University of Vlora, Albania Abstract This paper is focused on presenting
AN AUTONOMOUS SIMULATION BASED SYSTEM FOR ROBOTIC SERVICES IN PARTIALLY KNOWN ENVIRONMENTS Eva Cipi, PhD in Computer Engineering University of Vlora, Albania Abstract This paper is focused on presenting
Intelligent Agents & Search Problem Formulation. AIMA, Chapters 2,
 Intelligent Agents & Search Problem Formulation AIMA, Chapters 2, 3.1-3.2 Outline for today s lecture Intelligent Agents (AIMA 2.1-2) Task Environments Formulating Search Problems CIS 421/521 - Intro to
Intelligent Agents & Search Problem Formulation AIMA, Chapters 2, 3.1-3.2 Outline for today s lecture Intelligent Agents (AIMA 2.1-2) Task Environments Formulating Search Problems CIS 421/521 - Intro to
Co-evolution of agent-oriented conceptual models and CASO agent programs
 University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2006 Co-evolution of agent-oriented conceptual models and CASO agent programs
University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2006 Co-evolution of agent-oriented conceptual models and CASO agent programs
Component Based Mechatronics Modelling Methodology
 Component Based Mechatronics Modelling Methodology R.Sell, M.Tamre Department of Mechatronics, Tallinn Technical University, Tallinn, Estonia ABSTRACT There is long history of developing modelling systems
Component Based Mechatronics Modelling Methodology R.Sell, M.Tamre Department of Mechatronics, Tallinn Technical University, Tallinn, Estonia ABSTRACT There is long history of developing modelling systems
Mixed-Initiative Aspects in an Agent-Based System
 From: AAAI Technical Report SS-97-04. Compilation copyright 1997, AAAI (www.aaai.org). All rights reserved. Mixed-Initiative Aspects in an Agent-Based System Daniela D Aloisi Fondazione Ugo Bordoni * Via
From: AAAI Technical Report SS-97-04. Compilation copyright 1997, AAAI (www.aaai.org). All rights reserved. Mixed-Initiative Aspects in an Agent-Based System Daniela D Aloisi Fondazione Ugo Bordoni * Via
D-DEI Pedro Tiago Caparide. IST - Universidade de Lisboa. MTP - Metodologia e Tecnologia da Programação
 D-DEI 2017 @ Caparide Pedro Tiago Monteiro IST - Universidade de Lisboa MTP - Metodologia e Tecnologia da Programação Pedro T. Monteiro D-DEI 2017 1/15 Presentation Pedro T. Monteiro Assistant Professor
D-DEI 2017 @ Caparide Pedro Tiago Monteiro IST - Universidade de Lisboa MTP - Metodologia e Tecnologia da Programação Pedro T. Monteiro D-DEI 2017 1/15 Presentation Pedro T. Monteiro Assistant Professor
NSF. Hybrid Systems: From Models to Code. Tom Henzinger. UC Berkeley. French Guyana, June 4, 1996 $800 million embedded software failure
 Hybrid Systems: From Models to Code Tom Henzinger UC Berkeley NSF UC Berkeley: Chess Vanderbilt University: ISIS University of Memphis: MSI Foundations of Hybrid and Embedded Software Systems French Guyana,
Hybrid Systems: From Models to Code Tom Henzinger UC Berkeley NSF UC Berkeley: Chess Vanderbilt University: ISIS University of Memphis: MSI Foundations of Hybrid and Embedded Software Systems French Guyana,
Verification of Generic Ubiquitous Middleware for Smart Home Using Coloured Petri Nets
 I.J. Information Technology and Computer Science, 2014, 10, 63-69 Published Online September 2014 in MECS (http://www.mecs-press.org/) DOI: 10.5815/ijitcs.2014.10.09 Verification of Generic Ubiquitous
I.J. Information Technology and Computer Science, 2014, 10, 63-69 Published Online September 2014 in MECS (http://www.mecs-press.org/) DOI: 10.5815/ijitcs.2014.10.09 Verification of Generic Ubiquitous
A Colored Petri Net Model of Simulation for Performance Evaluation for IEEE based Network
 A Colored Petri Net Model of Simulation for Performance Evaluation for IEEE 802.22 based Network Eduardo M. Vasconcelos 1 and Kelvin L. Dias 2 1 Federal Institute of Education, Science and Technology of
A Colored Petri Net Model of Simulation for Performance Evaluation for IEEE 802.22 based Network Eduardo M. Vasconcelos 1 and Kelvin L. Dias 2 1 Federal Institute of Education, Science and Technology of
Structural Analysis of Agent Oriented Methodologies
 International Journal of Information & Computation Technology. ISSN 0974-2239 Volume 4, Number 6 (2014), pp. 613-618 International Research Publications House http://www. irphouse.com Structural Analysis
International Journal of Information & Computation Technology. ISSN 0974-2239 Volume 4, Number 6 (2014), pp. 613-618 International Research Publications House http://www. irphouse.com Structural Analysis
Formalising Concurrent UML State Machines Using Coloured Petri Nets
 KSE 2014 October 10th, 2014 Hanoi Formalising Concurrent UML State Machines Using Coloured Petri Nets Étienne André, Mohamed Mahdi Benmoussa, Christine Choppy Université Paris 13, Sorbonne Paris Cité,
KSE 2014 October 10th, 2014 Hanoi Formalising Concurrent UML State Machines Using Coloured Petri Nets Étienne André, Mohamed Mahdi Benmoussa, Christine Choppy Université Paris 13, Sorbonne Paris Cité,
Multi-Platform Soccer Robot Development System
 Multi-Platform Soccer Robot Development System Hui Wang, Han Wang, Chunmiao Wang, William Y. C. Soh Division of Control & Instrumentation, School of EEE Nanyang Technological University Nanyang Avenue,
Multi-Platform Soccer Robot Development System Hui Wang, Han Wang, Chunmiao Wang, William Y. C. Soh Division of Control & Instrumentation, School of EEE Nanyang Technological University Nanyang Avenue,
Software verification
 Software verification Will it ever work? Ofer Strichman, Technion 1 Testing: does the program behave as expected for a given set of inputs? Formal Verification: does the program behave as specified for
Software verification Will it ever work? Ofer Strichman, Technion 1 Testing: does the program behave as expected for a given set of inputs? Formal Verification: does the program behave as specified for
3.1 Agents. Foundations of Artificial Intelligence. 3.1 Agents. 3.2 Rationality. 3.3 Summary. Introduction: Overview. 3. Introduction: Rational Agents
 Foundations of Artificial Intelligence February 26, 2016 3. Introduction: Rational Agents Foundations of Artificial Intelligence 3. Introduction: Rational Agents 3.1 Agents Malte Helmert Universität Basel
Foundations of Artificial Intelligence February 26, 2016 3. Introduction: Rational Agents Foundations of Artificial Intelligence 3. Introduction: Rational Agents 3.1 Agents Malte Helmert Universität Basel
MAS336 Computational Problem Solving. Problem 3: Eight Queens
 MAS336 Computational Problem Solving Problem 3: Eight Queens Introduction Francis J. Wright, 2007 Topics: arrays, recursion, plotting, symmetry The problem is to find all the distinct ways of choosing
MAS336 Computational Problem Solving Problem 3: Eight Queens Introduction Francis J. Wright, 2007 Topics: arrays, recursion, plotting, symmetry The problem is to find all the distinct ways of choosing
Domain: Computer Science and Information Technology Curricula for the First Year (2012/2013)
") Curricula for the First Year (2012/2013) Type/e F Mathematics 1 3 2 - - E - - - - - 5 F Mathematics 2 3 2 - - E - - - - - 5 F Computer programming 2-2 - E - - - - - 5 D Introduction to operating systems
Curricula for the First Year (2012/2013) Type/e F Mathematics 1 3 2 - - E - - - - - 5 F Mathematics 2 3 2 - - E - - - - - 5 F Computer programming 2-2 - E - - - - - 5 D Introduction to operating systems
Despite the euphonic name, the words in the program title actually do describe what we're trying to do:
 I've been told that DASADA is a town in the home state of Mahatma Gandhi. This seems a fitting name for the program, since today's military missions that include both peacekeeping and war fighting. Despite
I've been told that DASADA is a town in the home state of Mahatma Gandhi. This seems a fitting name for the program, since today's military missions that include both peacekeeping and war fighting. Despite
Petri net models of metastable operations in latch circuits
 . Abstract Petri net models of metastable operations in latch circuits F. Xia *, I.G. Clark, A.V. Yakovlev * and A.C. Davies Data communications between concurrent processes often employ shared latch circuitry
. Abstract Petri net models of metastable operations in latch circuits F. Xia *, I.G. Clark, A.V. Yakovlev * and A.C. Davies Data communications between concurrent processes often employ shared latch circuitry
Mobile Tourist Guide Services with Software Agents
 Mobile Tourist Guide Services with Software Agents Juan Pavón 1, Juan M. Corchado 2, Jorge J. Gómez-Sanz 1 and Luis F. Castillo Ossa 2 1 Dep. Sistemas Informáticos y Programación Universidad Complutense
Mobile Tourist Guide Services with Software Agents Juan Pavón 1, Juan M. Corchado 2, Jorge J. Gómez-Sanz 1 and Luis F. Castillo Ossa 2 1 Dep. Sistemas Informáticos y Programación Universidad Complutense
A CYBER PHYSICAL SYSTEMS APPROACH FOR ROBOTIC SYSTEMS DESIGN
 Proceedings of the Annual Symposium of the Institute of Solid Mechanics and Session of the Commission of Acoustics, SISOM 2015 Bucharest 21-22 May A CYBER PHYSICAL SYSTEMS APPROACH FOR ROBOTIC SYSTEMS
Proceedings of the Annual Symposium of the Institute of Solid Mechanics and Session of the Commission of Acoustics, SISOM 2015 Bucharest 21-22 May A CYBER PHYSICAL SYSTEMS APPROACH FOR ROBOTIC SYSTEMS
Failures: Their definition, modelling & analysis
 Failures: Their definition, modelling & analysis (Submitted to DSN) Brian Randell and Maciej Koutny 1 Summary of the Paper We introduce the concept of a Structured Occurrence Net (SON), based on that of
Failures: Their definition, modelling & analysis (Submitted to DSN) Brian Randell and Maciej Koutny 1 Summary of the Paper We introduce the concept of a Structured Occurrence Net (SON), based on that of
SPECIFICATION 629 CP MAC LAYER. fgallon, juanole,
 MODELLING AND ANALYSIS OF THE ARINC SPECIFICION 629 CP MAC LAYER PROTOCOL GALLON, L., JUANOLE, G. and BLUM, I. LAAS-CNRS, 7 avenue du colonel Roche, 31400 Toulouse Cedex 4. FRANCE E-mail :fgallon, juanole,
MODELLING AND ANALYSIS OF THE ARINC SPECIFICION 629 CP MAC LAYER PROTOCOL GALLON, L., JUANOLE, G. and BLUM, I. LAAS-CNRS, 7 avenue du colonel Roche, 31400 Toulouse Cedex 4. FRANCE E-mail :fgallon, juanole,
CPE/CSC 580: Intelligent Agents
 CPE/CSC 580: Intelligent Agents Franz J. Kurfess Computer Science Department California Polytechnic State University San Luis Obispo, CA, U.S.A. 1 Course Overview Introduction Intelligent Agent, Multi-Agent
CPE/CSC 580: Intelligent Agents Franz J. Kurfess Computer Science Department California Polytechnic State University San Luis Obispo, CA, U.S.A. 1 Course Overview Introduction Intelligent Agent, Multi-Agent
Glossary of terms. Short explanation
 Glossary Concept Module. Video Short explanation Abstraction 2.4 Capturing the essence of the behavior of interest (getting a model or representation) Action in the control Derivative 4.2 The control signal
Glossary Concept Module. Video Short explanation Abstraction 2.4 Capturing the essence of the behavior of interest (getting a model or representation) Action in the control Derivative 4.2 The control signal
Notes S5 breakout session - Hybrid Automata Verification S5 Conference June 2015
 Notes S5 breakout session - Hybrid Automata Verification S5 Conference June 2015 Introduction - What is the definition of nondeterminism we are considering? Certification nondeterminism? Usually there
Notes S5 breakout session - Hybrid Automata Verification S5 Conference June 2015 Introduction - What is the definition of nondeterminism we are considering? Certification nondeterminism? Usually there
Globalizing Modeling Languages
 Globalizing Modeling Languages Benoit Combemale, Julien Deantoni, Benoit Baudry, Robert B. France, Jean-Marc Jézéquel, Jeff Gray To cite this version: Benoit Combemale, Julien Deantoni, Benoit Baudry,
Globalizing Modeling Languages Benoit Combemale, Julien Deantoni, Benoit Baudry, Robert B. France, Jean-Marc Jézéquel, Jeff Gray To cite this version: Benoit Combemale, Julien Deantoni, Benoit Baudry,
Handling Failures In A Swarm
 Handling Failures In A Swarm Gaurav Verma 1, Lakshay Garg 2, Mayank Mittal 3 Abstract Swarm robotics is an emerging field of robotics research which deals with the study of large groups of simple robots.
Handling Failures In A Swarm Gaurav Verma 1, Lakshay Garg 2, Mayank Mittal 3 Abstract Swarm robotics is an emerging field of robotics research which deals with the study of large groups of simple robots.
Software-Intensive Systems Producibility
 Pittsburgh, PA 15213-3890 Software-Intensive Systems Producibility Grady Campbell Sponsored by the U.S. Department of Defense 2006 by Carnegie Mellon University SSTC 2006. - page 1 Producibility
Pittsburgh, PA 15213-3890 Software-Intensive Systems Producibility Grady Campbell Sponsored by the U.S. Department of Defense 2006 by Carnegie Mellon University SSTC 2006. - page 1 Producibility
SOFTWARE AGENTS IN HANDLING ABNORMAL SITUATIONS IN INDUSTRIAL PLANTS
 SOFTWARE AGENTS IN HANDLING ABNORMAL SITUATIONS IN INDUSTRIAL PLANTS Sami Syrjälä and Seppo Kuikka Institute of Automation and Control Department of Automation Tampere University of Technology Korkeakoulunkatu
SOFTWARE AGENTS IN HANDLING ABNORMAL SITUATIONS IN INDUSTRIAL PLANTS Sami Syrjälä and Seppo Kuikka Institute of Automation and Control Department of Automation Tampere University of Technology Korkeakoulunkatu
A Reinforcement Learning Scheme for Adaptive Link Allocation in ATM Networks
 A Reinforcement Learning Scheme for Adaptive Link Allocation in ATM Networks Ernst Nordström, Jakob Carlström Department of Computer Systems, Uppsala University, Box 325, S 751 05 Uppsala, Sweden Fax:
A Reinforcement Learning Scheme for Adaptive Link Allocation in ATM Networks Ernst Nordström, Jakob Carlström Department of Computer Systems, Uppsala University, Box 325, S 751 05 Uppsala, Sweden Fax:
Distributed Systems Programming (F21DS1) Formal Methods for Distributed Systems
 Formal Methods for Distributed Systems") Distributed Systems Programming (F21DS1) Formal Methods for Distributed Systems Andrew Ireland Department of Computer Science School of Mathematical and Computer Sciences Heriot-Watt University Edinburgh
Distributed Systems Programming (F21DS1) Formal Methods for Distributed Systems Andrew Ireland Department of Computer Science School of Mathematical and Computer Sciences Heriot-Watt University Edinburgh
Multi-robot task allocation problem: current trends and new ideas
 Multi-robot task allocation problem: current trends and new ideas Mattia D Emidio 1, Imran Khan 1 Gran Sasso Science Institute (GSSI) Via F. Crispi, 7, I 67100, L Aquila (Italy) {mattia.demidio,imran.khan}@gssi.it
Multi-robot task allocation problem: current trends and new ideas Mattia D Emidio 1, Imran Khan 1 Gran Sasso Science Institute (GSSI) Via F. Crispi, 7, I 67100, L Aquila (Italy) {mattia.demidio,imran.khan}@gssi.it
AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS. Nuno Sousa Eugénio Oliveira
 AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS Nuno Sousa Eugénio Oliveira Faculdade de Egenharia da Universidade do Porto, Portugal Abstract: This paper describes a platform that enables
AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS Nuno Sousa Eugénio Oliveira Faculdade de Egenharia da Universidade do Porto, Portugal Abstract: This paper describes a platform that enables
Using Dynamic Capability Evaluation to Organize a Team of Cooperative, Autonomous Robots
 Using Dynamic Capability Evaluation to Organize a Team of Cooperative, Autonomous Robots Eric Matson Scott DeLoach Multi-agent and Cooperative Robotics Laboratory Department of Computing and Information
Using Dynamic Capability Evaluation to Organize a Team of Cooperative, Autonomous Robots Eric Matson Scott DeLoach Multi-agent and Cooperative Robotics Laboratory Department of Computing and Information
SAFETY CASES: ARGUING THE SAFETY OF AUTONOMOUS SYSTEMS SIMON BURTON DAGSTUHL,
 SAFETY CASES: ARGUING THE SAFETY OF AUTONOMOUS SYSTEMS SIMON BURTON DAGSTUHL, 17.02.2017 The need for safety cases Interaction and Security is becoming more than what happens when things break functional
SAFETY CASES: ARGUING THE SAFETY OF AUTONOMOUS SYSTEMS SIMON BURTON DAGSTUHL, 17.02.2017 The need for safety cases Interaction and Security is becoming more than what happens when things break functional
Engineering Autonomy
 Engineering Autonomy Mr. Robert Gold Director, Engineering Enterprise Office of the Deputy Assistant Secretary of Defense for Systems Engineering 20th Annual NDIA Systems Engineering Conference Springfield,
Engineering Autonomy Mr. Robert Gold Director, Engineering Enterprise Office of the Deputy Assistant Secretary of Defense for Systems Engineering 20th Annual NDIA Systems Engineering Conference Springfield,
a) List HW and SW components of the device, and briefly discuss how those components are exploited in the embedded systems
 List HW and SW components of the device, and briefly discuss how those components are exploited in the embedded systems") CSE 237A Winter 2018 Homework 3 Problem 1 [10 pts] Answer following questions by analyzing the IoT device: Amazon Echo Dot. You should do some research beyond the class material. a) List HW and SW components
CSE 237A Winter 2018 Homework 3 Problem 1 [10 pts] Answer following questions by analyzing the IoT device: Amazon Echo Dot. You should do some research beyond the class material. a) List HW and SW components
A Formal And Executable Model For Path Finding
 A Formal And Executable Model For Path Finding N. Maragos, D.N. Kleftouris, C. Ziogou Dept of Information Technology Technological Educational Institute of Thessaloniki Thessaloniki 546 06, Greece Email
A Formal And Executable Model For Path Finding N. Maragos, D.N. Kleftouris, C. Ziogou Dept of Information Technology Technological Educational Institute of Thessaloniki Thessaloniki 546 06, Greece Email
Towards a Platform for Online Mediation
 Pablo Noriega 1 and Carlos López 1 Artificial Intelligence Research Institute (IIIA-CSIC), Campus UAB, 08193 Bellaterra (Barcelona), Spain {pablo,clopez}@iiia.csic.es Abstract: In this paper we describe
Pablo Noriega 1 and Carlos López 1 Artificial Intelligence Research Institute (IIIA-CSIC), Campus UAB, 08193 Bellaterra (Barcelona), Spain {pablo,clopez}@iiia.csic.es Abstract: In this paper we describe
Traffic Control for a Swarm of Robots: Avoiding Group Conflicts
 Traffic Control for a Swarm of Robots: Avoiding Group Conflicts Leandro Soriano Marcolino and Luiz Chaimowicz Abstract A very common problem in the navigation of robotic swarms is when groups of robots
Traffic Control for a Swarm of Robots: Avoiding Group Conflicts Leandro Soriano Marcolino and Luiz Chaimowicz Abstract A very common problem in the navigation of robotic swarms is when groups of robots
Supervisory Control for Robot Coordination Something about what we do at Chalmers Automation. Outline. Visit at Politecnico di Milano, May 2007
 Supervisory Control for Robot Coordination Something about what we do at Outline Sweden, Göteborg, Chalmers Where, What, When? Depend on us Robot Coordination Police and Chiefs Supremica The Supremal Tool?
Supervisory Control for Robot Coordination Something about what we do at Outline Sweden, Göteborg, Chalmers Where, What, When? Depend on us Robot Coordination Police and Chiefs Supremica The Supremal Tool?
Course Summary. 3213: Digital Systems & Microprocessors: L#14_15
 Course Summary 1. Course overview 2. Intro to PICOBLAZE, C and Number systems and Boolean Algebra 3. Course overview with microprocessor MU0 (I) 4. Course overview with microprocessor MU0 (II) 5. Verilog
Course Summary 1. Course overview 2. Intro to PICOBLAZE, C and Number systems and Boolean Algebra 3. Course overview with microprocessor MU0 (I) 4. Course overview with microprocessor MU0 (II) 5. Verilog
Virtual prototyping based development and marketing of future consumer electronics products
 31 Virtual prototyping based development and marketing of future consumer electronics products P. J. Pulli, M. L. Salmela, J. K. Similii* VIT Electronics, P.O. Box 1100, 90571 Oulu, Finland, tel. +358
31 Virtual prototyping based development and marketing of future consumer electronics products P. J. Pulli, M. L. Salmela, J. K. Similii* VIT Electronics, P.O. Box 1100, 90571 Oulu, Finland, tel. +358
Derivation of an Asynchronous Counter
 Derivation of an Asynchronous Counter with 105ps/bit load time and early completion in 90nm CMOS Adam Megacz July 17, 2009 Abstract This draft memo describes the process by which I methodically derived
Derivation of an Asynchronous Counter with 105ps/bit load time and early completion in 90nm CMOS Adam Megacz July 17, 2009 Abstract This draft memo describes the process by which I methodically derived
On the Combination of Constraint Programming and Stochastic Search: The Sudoku Case
 On the Combination of Constraint Programming and Stochastic Search: The Sudoku Case Rhydian Lewis Cardiff Business School Pryfysgol Caerdydd/ Cardiff University lewisr@cf.ac.uk Talk Plan Introduction:
On the Combination of Constraint Programming and Stochastic Search: The Sudoku Case Rhydian Lewis Cardiff Business School Pryfysgol Caerdydd/ Cardiff University lewisr@cf.ac.uk Talk Plan Introduction:
Distributed Collaborative Path Planning in Sensor Networks with Multiple Mobile Sensor Nodes
 7th Mediterranean Conference on Control & Automation Makedonia Palace, Thessaloniki, Greece June 4-6, 009 Distributed Collaborative Path Planning in Sensor Networks with Multiple Mobile Sensor Nodes Theofanis
7th Mediterranean Conference on Control & Automation Makedonia Palace, Thessaloniki, Greece June 4-6, 009 Distributed Collaborative Path Planning in Sensor Networks with Multiple Mobile Sensor Nodes Theofanis
Proposed Curriculum Master of Science in Systems Engineering for The MITRE Corporation
 Proposed Curriculum Master of Science in Systems Engineering for The MITRE Corporation Core Requirements: (9 Credits) SYS 501 Concepts of Systems Engineering SYS 510 Systems Architecture and Design SYS
Proposed Curriculum Master of Science in Systems Engineering for The MITRE Corporation Core Requirements: (9 Credits) SYS 501 Concepts of Systems Engineering SYS 510 Systems Architecture and Design SYS
AGENT BASED MANUFACTURING CAPABILITY ASSESSMENT IN THE EXTENDED ENTERPRISE USING STEP AP224 AND XML
 17 AGENT BASED MANUFACTURING CAPABILITY ASSESSMENT IN THE EXTENDED ENTERPRISE USING STEP AP224 AND XML Svetan Ratchev and Omar Medani School of Mechanical, Materials, Manufacturing Engineering and Management,
17 AGENT BASED MANUFACTURING CAPABILITY ASSESSMENT IN THE EXTENDED ENTERPRISE USING STEP AP224 AND XML Svetan Ratchev and Omar Medani School of Mechanical, Materials, Manufacturing Engineering and Management,
A Model-Theoretic Approach to the Verification of Situated Reasoning Systems
 A Model-Theoretic Approach to the Verification of Situated Reasoning Systems Anand 5. Rao and Michael P. Georgeff Australian Artificial Intelligence Institute 1 Grattan Street, Carlton Victoria 3053, Australia
A Model-Theoretic Approach to the Verification of Situated Reasoning Systems Anand 5. Rao and Michael P. Georgeff Australian Artificial Intelligence Institute 1 Grattan Street, Carlton Victoria 3053, Australia
Agent Oriented Software Engineering
 Agent Oriented Software Engineering Multiagent Systems LS Sistemi Multiagente LS Ambra Molesini ambra.molesini@unibo.it Alma Mater Studiorum Universitá di Bologna Academic Year 2006/2007 Ambra Molesini
Agent Oriented Software Engineering Multiagent Systems LS Sistemi Multiagente LS Ambra Molesini ambra.molesini@unibo.it Alma Mater Studiorum Universitá di Bologna Academic Year 2006/2007 Ambra Molesini