Micro Autonomous Systems and Technology CTA
|
|
|
- Julianna Simmons
- 6 years ago
- Views:
Transcription



1 UNCLASSIFIED U.S. Army Research, Development and Engineering Command Micro Autonomous Systems and Technology CTA Brett Piekarski MAST CTA CAM Branch Chief, Micro & Nano Materials & Devices U.S. Army Research Laboratory UNCLASSIFIED


2 ARL Autonomous Systems Research Enterprise Provide fundamental science underpinnings of autonomous systems for the Army Soldiers/Unmanned System Teaming: Combat multiplier Team member Heterogeneous groups Following commander s intent Robotics Collaborative Technology Alliance (CTA) ARL Internal Mission Research Micro Autonomous Systems & Technology CTA ARO SIP, MURI From micro-systems to combat vehicles 2





")


3 Fort Indiantown Gap Supervised Adjacent Autonomous Facilities Assets for the Dismount Combined Arms Combat Training Facility To provide rapid (CACTF) and mobile ISR and mission support for the Dismounted Soldier beyond the eye of current national assets Urban environment for troop training located approximately 1 kilometer distant containing Road network Buildings (interior/exterior) Tunnels/ sewer systems Phase 1 to be completed in Spring UNCLASSIFIED Caves and Strategic Bunkers Jungles and Under Canopies In Urban and Rubble Environments



4 Challenges to Achieve Vision Military Relevant Environments: Highly Unstructured to Austere Limited to no a priori knowledge GPS denied and Low/no Light Complex RF environments Dynamic and Hostile Military Relevant Missions: Soldier ISR Asset for Rapid and Mobile Deployment - payloads Constantly changing environments and objectives learning Small Heterogeneous teams Semi-autonomous systems Human in the loop Intelligent Systems/Assets Technical Challenges: Robust operation across domains Caves, Jungle, Urban, etc High Operational Tempo Soldier transportable systems SWaP constrained Processing constrained Gust tolerant & Low Re flight Complex terrain ground mobility Fast vehicle dynamics and poor models Localization in Austere environments Long Duration GPS denied navigation Minimalistic Mapping Communications


5 Microautonomous Systems and Technology Enhance tactical situational awareness in urban and complex terrain by enabling the autonomous operation of a collaborative ensemble of multifunctional, mobile microsystems Rapid and Mobile ISR for the Dismounted Soldier
6 MAST CTA 6.1 Basic Research Program funded by cooperative agreement ~$7.5M per year 5 year initial program awarded in Feb 08 Option for 5-year extension awarded Nov 2012 Start 6.2 Technology transition Unfunded - indefinite duration-indefinite quantity (IDIQ) task order contract Current funded efforts from DARPA Corps of Engineers DTRA Navy
7 MAST CTA Organization Four Research Centers: Integration - BAE/JPL Microsystem Mechanics Maryland Microelectronics Michigan Autonomous Operation Pennsylvania General Members and Subawardees: Georgia Tech, Harvard, Stanford, MIT, UC Berkeley, CMU, Univ. of Washington, New Mexico State, Univ. of New Mexico, UT Austin, Univ. of Delaware, Drexel, VT, UC Merced, KMEL Robotics, Daedalus Flight Systems Microelectronics Microsystem mechanics Processing for Autonomous Systems Center Four Cross-Cutting Research Thrust Areas: Mobility, Control, and Energetics Communication, Navigation, and Coordination Sensing, Perception, and Processing Joint Experimentation Integration Center Army Research Laboratory
8 Technical Management Group (TMG) ARL Leadership Brett Piekarski (CAM) (301) Tom Doligalski (Deputy CAM) (919) Consortium Leadership Stephen Scalera (Program Director) (603) Susan Wright (Bus. Oper. Director) Integration: Microsystems Mechanics: Microelectronics: Processing for Autonomous Operation: Brian Morgan (301) Chris Kroninger (410) William Nothwang (301) Brian Sadler (301) Larry Matthies (818) Inderjit Chopra (301) Karmal Sarabandi (734) Vijay Kumar (215)





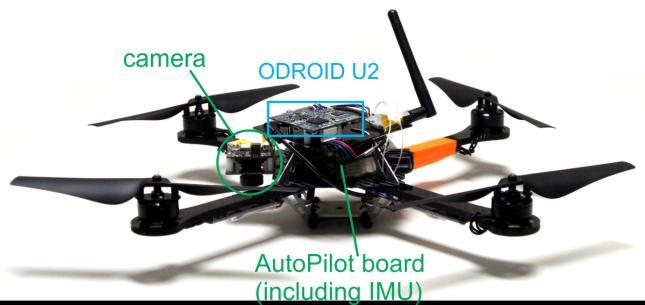
9 Navigation and Control of Collaborative MicroSystems Indoor/Outdoor GPS Denied Navigation and Mapping Heterogeneous Collaborative Systems Real-time motion generation for groups of micro-uavs operating in cluttered, partially-known environments Aggressive Maneuvers and Collaborative Behaviors



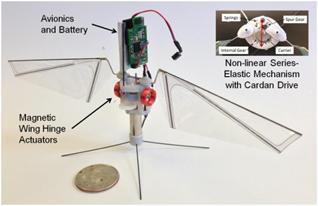

10 Aeromechanics and Terramechanics Novel Systems - Cyclocopter Understanding Ambulation over Complex Terrain CFD, PIV, etc tools and understanding flapping flight





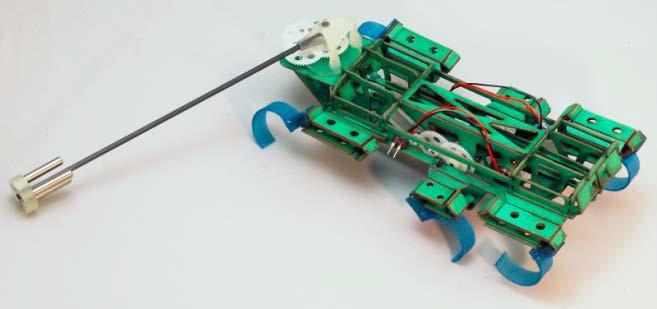



11 Bio-Inspired Agility and Control Ambulation and Transitions in Complex Terrain Use of Tails and Appendages Perching and Grasping


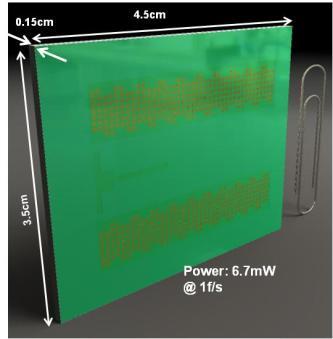
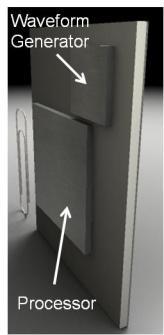
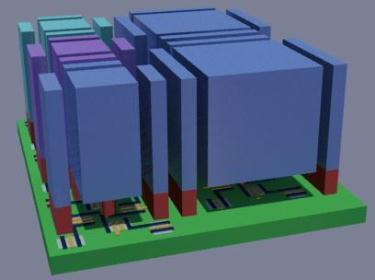
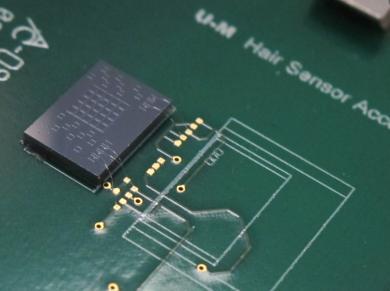
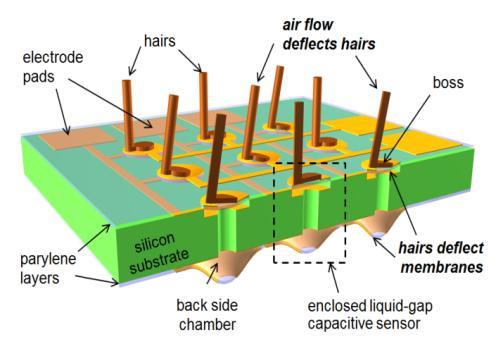
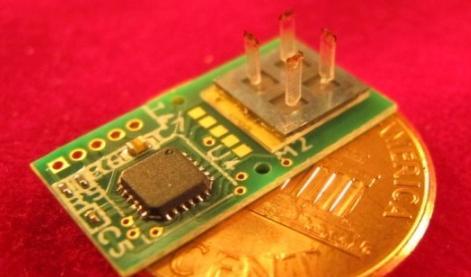



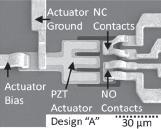
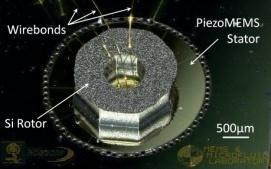
12 Sensors for Micro Autonomous Systems 5g 220 GHz Radar Fail-safe State Estimation Using Visual and Inertial Sensors Hair-like Arrayed Sensors for Gust and Acceleration Sensing Small Antennas for Low VHF Comms Robust State Estimation PiezoMEMS Enables PNT Solutions Stereo/Optic Flow Sensor Fusion in Inverse Depth Space





13 Joint Experimentation Thrust Wind/Gust Sensing and Mitigation on MAST- Scale MAVs Active Cooperative Mapping by MAVs Heterogeneous Robot Teams for Mapping 3-D Indoor Environments Autonomous Rooftop Landing for Surveillance and Payload Drop-Off




14 Collaborations and Transitions with ARL Levine building, 1996/2003, wood/metal framing with drywall Autonomous Navigation for Communication Maintenance Miniaturized HF for Communications & Geolocation Long duration 3D mapping and navigation in GPS-denied relevant environments Sensing and Perception for Processing Constrained Platforms




15 Joint Experimental Testing Infrastructure Building 507
OFFensive Swarm-Enabled Tactics (OFFSET)
") OFFensive Swarm-Enabled Tactics (OFFSET) Dr. Timothy H. Chung, Program Manager Tactical Technology Office Briefing Prepared for OFFSET Proposers Day 1 Why are Swarms Hard: Complexity of Swarms Number Agent
OFFensive Swarm-Enabled Tactics (OFFSET) Dr. Timothy H. Chung, Program Manager Tactical Technology Office Briefing Prepared for OFFSET Proposers Day 1 Why are Swarms Hard: Complexity of Swarms Number Agent
Robotic Systems. Jeff Jaster Deputy Associate Director for Autonomous Systems US Army TARDEC Intelligent Ground Systems
 Robotic Systems Jeff Jaster Deputy Associate Director for Autonomous Systems US Army TARDEC Intelligent Ground Systems Robotics Life Cycle Mission Integrate, Explore, and Develop Robotics, Network and
Robotic Systems Jeff Jaster Deputy Associate Director for Autonomous Systems US Army TARDEC Intelligent Ground Systems Robotics Life Cycle Mission Integrate, Explore, and Develop Robotics, Network and
ARMY RDT&E BUDGET ITEM JUSTIFICATION (R2 Exhibit)
") Exhibit R-2 0602308A Advanced Concepts and Simulation ARMY RDT&E BUDGET ITEM JUSTIFICATION (R2 Exhibit) FY 2005 FY 2006 FY 2007 FY 2008 FY 2009 FY 2010 FY 2011 Total Program Element (PE) Cost 22710 27416
Exhibit R-2 0602308A Advanced Concepts and Simulation ARMY RDT&E BUDGET ITEM JUSTIFICATION (R2 Exhibit) FY 2005 FY 2006 FY 2007 FY 2008 FY 2009 FY 2010 FY 2011 Total Program Element (PE) Cost 22710 27416
Jager UAVs to Locate GPS Interference
 JIFX 16-1 2-6 November 2015 Camp Roberts, CA Jager UAVs to Locate GPS Interference Stanford GPS Research Laboratory and the Stanford Intelligent Systems Lab Principal Investigator: Sherman Lo, PhD Area
JIFX 16-1 2-6 November 2015 Camp Roberts, CA Jager UAVs to Locate GPS Interference Stanford GPS Research Laboratory and the Stanford Intelligent Systems Lab Principal Investigator: Sherman Lo, PhD Area
Distribution Statement A (Approved for Public Release, Distribution Unlimited)
") www.darpa.mil 14 Programmatic Approach Focus teams on autonomy by providing capable Government-Furnished Equipment Enables quantitative comparison based exclusively on autonomy, not on mobility Teams add
www.darpa.mil 14 Programmatic Approach Focus teams on autonomy by providing capable Government-Furnished Equipment Enables quantitative comparison based exclusively on autonomy, not on mobility Teams add
WE SPECIALIZE IN MILITARY PNT Research Education Engineering
 Defense-Focused Autonomy & Navigation Anywhere, Anytime, Using Anything WE SPECIALIZE IN MILITARY PNT Research Education Engineering RESEARCH THRUST 1 RESEARCH THRUST 2 RESEARCH THRUST 3 Autonomous & Cooperative
Defense-Focused Autonomy & Navigation Anywhere, Anytime, Using Anything WE SPECIALIZE IN MILITARY PNT Research Education Engineering RESEARCH THRUST 1 RESEARCH THRUST 2 RESEARCH THRUST 3 Autonomous & Cooperative
Inertial Doppler Radio Locator (IDRL) for DoD Test Range Applications
 for DoD Test Range Applications") INNOVATIONS IN ENGINEERING Inertial Doppler Radio Locator (IDRL) for DoD Test Range Applications This project is funded by the Test Resource Management Center (TRMC) Test and Evaluation/Science and Technology
INNOVATIONS IN ENGINEERING Inertial Doppler Radio Locator (IDRL) for DoD Test Range Applications This project is funded by the Test Resource Management Center (TRMC) Test and Evaluation/Science and Technology
CAPACITIES FOR TECHNOLOGY TRANSFER
 CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
Dr. Tony Tether Director
 Dr. Tony Tether Director 2004 DARPA s Related Research Efforts Position Location in Space (LEO to?) Pulsar (X-Ray) navigation Advanced Communication Protocols Packet-based systems for communication with
Dr. Tony Tether Director 2004 DARPA s Related Research Efforts Position Location in Space (LEO to?) Pulsar (X-Ray) navigation Advanced Communication Protocols Packet-based systems for communication with
COI Annual Update: Guidance April 2017
 COI Annual Update: Guidance 18-20 April 2017 1 Space COI Annual Update - Overview COI Description The goal of the Space COI is to 1) Facilitate collaboration and leveraging of complementary investments
COI Annual Update: Guidance 18-20 April 2017 1 Space COI Annual Update - Overview COI Description The goal of the Space COI is to 1) Facilitate collaboration and leveraging of complementary investments
The Army s Future Tactical UAS Technology Demonstrator Program
 The Army s Future Tactical UAS Technology Demonstrator Program This information product has been reviewed and approved for public release, distribution A (Unlimited). Review completed by the AMRDEC Public
The Army s Future Tactical UAS Technology Demonstrator Program This information product has been reviewed and approved for public release, distribution A (Unlimited). Review completed by the AMRDEC Public
Prospective Teleautonomy For EOD Operations
 Perception and task guidance Perceived world model & intent Prospective Teleautonomy For EOD Operations Prof. Seth Teller Electrical Engineering and Computer Science Department Computer Science and Artificial
Perception and task guidance Perceived world model & intent Prospective Teleautonomy For EOD Operations Prof. Seth Teller Electrical Engineering and Computer Science Department Computer Science and Artificial
Wide Area Wireless Networked Navigators
 Wide Area Wireless Networked Navigators Dr. Norman Coleman, Ken Lam, George Papanagopoulos, Ketula Patel, and Ricky May US Army Armament Research, Development and Engineering Center Picatinny Arsenal,
Wide Area Wireless Networked Navigators Dr. Norman Coleman, Ken Lam, George Papanagopoulos, Ketula Patel, and Ricky May US Army Armament Research, Development and Engineering Center Picatinny Arsenal,
Experimental Cooperative Control of Fixed-Wing Unmanned Aerial Vehicles
 Experimental Cooperative Control of Fixed-Wing Unmanned Aerial Vehicles Selcuk Bayraktar, Georgios E. Fainekos, and George J. Pappas GRASP Laboratory Departments of ESE and CIS University of Pennsylvania
Experimental Cooperative Control of Fixed-Wing Unmanned Aerial Vehicles Selcuk Bayraktar, Georgios E. Fainekos, and George J. Pappas GRASP Laboratory Departments of ESE and CIS University of Pennsylvania
World Technology Evaluation Center International Study of Robotics Research. Robotic Vehicles. Robotic vehicles study group:
 World Technology Evaluation Center International Study of Robotics Research Robotic Vehicles Robotic vehicles study group: Arthur Sanderson, Rensselaer Polytechnic Institute (Presenter) George Bekey, University
World Technology Evaluation Center International Study of Robotics Research Robotic Vehicles Robotic vehicles study group: Arthur Sanderson, Rensselaer Polytechnic Institute (Presenter) George Bekey, University
Ground Robotics Capability Conference and Exhibit. Mr. George Solhan Office of Naval Research Code March 2010
 Ground Robotics Capability Conference and Exhibit Mr. George Solhan Office of Naval Research Code 30 18 March 2010 1 S&T Focused on Naval Needs Broad FY10 DON S&T Funding = $1,824M Discovery & Invention
Ground Robotics Capability Conference and Exhibit Mr. George Solhan Office of Naval Research Code 30 18 March 2010 1 S&T Focused on Naval Needs Broad FY10 DON S&T Funding = $1,824M Discovery & Invention
Recent Applications of Ultra Wideband Radar and Communications Systems
 Recent Applications of Ultra Wideband Radar and Communications Systems Dr. Robert J. Fontana, President Multispectral Solutions, Inc. Gaithersburg, Maryland USA http://www.multispectral.com EuroEM 2000_Applications-1
Recent Applications of Ultra Wideband Radar and Communications Systems Dr. Robert J. Fontana, President Multispectral Solutions, Inc. Gaithersburg, Maryland USA http://www.multispectral.com EuroEM 2000_Applications-1
DoD Research and Engineering Enterprise
 DoD Research and Engineering Enterprise 18 th Annual National Defense Industrial Association Science & Emerging Technology Conference April 18, 2017 Mary J. Miller Acting Assistant Secretary of Defense
DoD Research and Engineering Enterprise 18 th Annual National Defense Industrial Association Science & Emerging Technology Conference April 18, 2017 Mary J. Miller Acting Assistant Secretary of Defense
ISTAR Concepts & Solutions
 ISTAR Concepts & Solutions CDE Call Presentation Cardiff, 8 th September 2011 Today s Brief Introduction to the programme The opportunities ISTAR challenges The context Requirements for Novel Integrated
ISTAR Concepts & Solutions CDE Call Presentation Cardiff, 8 th September 2011 Today s Brief Introduction to the programme The opportunities ISTAR challenges The context Requirements for Novel Integrated
Revised and extended. Accompanies this course pages heavier Perception treated more thoroughly. 1 - Introduction
 Topics to be Covered Coordinate frames and representations. Use of homogeneous transformations in robotics. Specification of position and orientation Manipulator forward and inverse kinematics Mobile Robots:
Topics to be Covered Coordinate frames and representations. Use of homogeneous transformations in robotics. Specification of position and orientation Manipulator forward and inverse kinematics Mobile Robots:
2018 Research Campaign Descriptions Additional Information Can Be Found at
 2018 Research Campaign Descriptions Additional Information Can Be Found at https://www.arl.army.mil/opencampus/ Analysis & Assessment Premier provider of land forces engineering analyses and assessment
2018 Research Campaign Descriptions Additional Information Can Be Found at https://www.arl.army.mil/opencampus/ Analysis & Assessment Premier provider of land forces engineering analyses and assessment
Engaging with DARPA. Dr. Stefanie Tompkins. June 9, Distribution Statement A (Approved for Public Release, Distribution Unlimited)
") Engaging with DARPA Dr. Stefanie Tompkins June 9, 2016 DARPA s Mission Breakthrough Technologies for National Security Precision Guidance & Navigation Communications/Networking IR Night Vision Stealth
Engaging with DARPA Dr. Stefanie Tompkins June 9, 2016 DARPA s Mission Breakthrough Technologies for National Security Precision Guidance & Navigation Communications/Networking IR Night Vision Stealth
Understanding DARPA - How to be Successful - Peter J. Delfyett CREOL, The College of Optics and Photonics
 Understanding DARPA - How to be Successful - Peter J. Delfyett CREOL, The College of Optics and Photonics delfyett@creol.ucf.edu November 6 th, 2013 Student Union, UCF Outline Goal and Motivation Some
Understanding DARPA - How to be Successful - Peter J. Delfyett CREOL, The College of Optics and Photonics delfyett@creol.ucf.edu November 6 th, 2013 Student Union, UCF Outline Goal and Motivation Some
Seeds of Technological Change
 Seeds of Technological Change Stefanie Tompkins Director, Defense Sciences Office Prepared for State University System of Florida Workshop October 8, 2015 Distribution Statement A (Approved for Public
Seeds of Technological Change Stefanie Tompkins Director, Defense Sciences Office Prepared for State University System of Florida Workshop October 8, 2015 Distribution Statement A (Approved for Public
DARPA Perspective on Space
 DARPA Perspective on Space Dr. Jeremy Palmer, Program Manager DARPA Tactical Technology Office Briefing Prepared for ASEB October 11, 2017 1 Breakthrough Technologies for National Security Diminishing
DARPA Perspective on Space Dr. Jeremy Palmer, Program Manager DARPA Tactical Technology Office Briefing Prepared for ASEB October 11, 2017 1 Breakthrough Technologies for National Security Diminishing
PROTECTING GPS/GNSS-RELIANT MILITARY SYSTEMS
 PROTECTING GPS/GNSS-RELIANT MILITARY SYSTEMS John Fischer VP Advanced R&D Jon Sinden Product Manager, Rugged PNT 6/21/2018 ABOUT OROLIA A world leader in assured positioning, navigation and timing (PNT)
PROTECTING GPS/GNSS-RELIANT MILITARY SYSTEMS John Fischer VP Advanced R&D Jon Sinden Product Manager, Rugged PNT 6/21/2018 ABOUT OROLIA A world leader in assured positioning, navigation and timing (PNT)
DARPA: Funding Advanced Research for the Department of Defense
 DARPA: Funding Advanced Research for the Department of Defense A Primer on How Things Work Dr. Ronald J. Brachman Director Information Processing Technology Office 24 February 2004 Distribution Statement
DARPA: Funding Advanced Research for the Department of Defense A Primer on How Things Work Dr. Ronald J. Brachman Director Information Processing Technology Office 24 February 2004 Distribution Statement
Automatic Payload Deployment System (APDS)
") Automatic Payload Deployment System (APDS) Brian Suh Director, T2 Office WBT Innovation Marketplace 2012 Report Documentation Page Form Approved OMB No. 0704-0188 Public reporting burden for the collection
Automatic Payload Deployment System (APDS) Brian Suh Director, T2 Office WBT Innovation Marketplace 2012 Report Documentation Page Form Approved OMB No. 0704-0188 Public reporting burden for the collection
UNCLASSIFIED R-1 ITEM NOMENCLATURE FY 2013 OCO
 Exhibit R-2, RDT&E Budget Item Justification: PB 2013 Air Force DATE: February 2012 BA 3: Advanced Development (ATD) COST ($ in Millions) Program Element 75.103 74.009 64.557-64.557 61.690 67.075 54.973
Exhibit R-2, RDT&E Budget Item Justification: PB 2013 Air Force DATE: February 2012 BA 3: Advanced Development (ATD) COST ($ in Millions) Program Element 75.103 74.009 64.557-64.557 61.690 67.075 54.973
DoD Research and Engineering Enterprise
 DoD Research and Engineering Enterprise 16 th U.S. Sweden Defense Industry Conference May 10, 2017 Mary J. Miller Acting Assistant Secretary of Defense for Research and Engineering 1526 Technology Transforming
DoD Research and Engineering Enterprise 16 th U.S. Sweden Defense Industry Conference May 10, 2017 Mary J. Miller Acting Assistant Secretary of Defense for Research and Engineering 1526 Technology Transforming
Future of New Capabilities
 Future of New Capabilities Mr. Dale Ormond, Principal Director for Research, Assistant Secretary of Defense (Research & Engineering) DoD Science and Technology Vision Sustaining U.S. technological superiority,
Future of New Capabilities Mr. Dale Ormond, Principal Director for Research, Assistant Secretary of Defense (Research & Engineering) DoD Science and Technology Vision Sustaining U.S. technological superiority,
The EDA SUM Project. Surveillance in an Urban environment using Mobile sensors. 2012, September 13 th - FMV SENSORS SYMPOSIUM 2012
 Surveillance in an Urban environment using Mobile sensors 2012, September 13 th - FMV SENSORS SYMPOSIUM 2012 TABLE OF CONTENTS European Defence Agency Supported Project 1. SUM Project Description. 2. Subsystems
Surveillance in an Urban environment using Mobile sensors 2012, September 13 th - FMV SENSORS SYMPOSIUM 2012 TABLE OF CONTENTS European Defence Agency Supported Project 1. SUM Project Description. 2. Subsystems
Networked Targeting Technology
 Networked Targeting Technology Stephen Welby Next Generation Time Critical Targeting Future Battlespace Dominance Requires the Ability to Hold Opposing Forces at Risk: At Any Time In Any Weather Fixed,
Networked Targeting Technology Stephen Welby Next Generation Time Critical Targeting Future Battlespace Dominance Requires the Ability to Hold Opposing Forces at Risk: At Any Time In Any Weather Fixed,
Low Cost Conformal Transmit/Receive SATCOM Antenna for Military Patrol Aircraft
 Low Cost Conformal Transmit/Receive SATCOM Antenna for Military Patrol Aircraft 9160 Red Branch Road Columbia, MD 21045-2002 Contact: Mr. Steve Gemeny Phone: (410) 884-0500 x205 Email: Steve.Gemeny@SyntonicsCorp.com
Low Cost Conformal Transmit/Receive SATCOM Antenna for Military Patrol Aircraft 9160 Red Branch Road Columbia, MD 21045-2002 Contact: Mr. Steve Gemeny Phone: (410) 884-0500 x205 Email: Steve.Gemeny@SyntonicsCorp.com
Donald J. Leo DARPA / Defense Sciences Office also, Professor Virginia Tech Mechanical Engineering Department
 Donald J. Leo DARPA / Defense Sciences Office also, Professor Virginia Tech Mechanical Engineering Department Outline DARPA Organization Doing Business with DARPA Some Opinions on DARPA and early career
Donald J. Leo DARPA / Defense Sciences Office also, Professor Virginia Tech Mechanical Engineering Department Outline DARPA Organization Doing Business with DARPA Some Opinions on DARPA and early career
Customer Showcase > Defense and Intelligence
 Customer Showcase Skyline TerraExplorer is a critical visualization technology broadly deployed in defense and intelligence, public safety and security, 3D geoportals, and urban planning markets. It fuses
Customer Showcase Skyline TerraExplorer is a critical visualization technology broadly deployed in defense and intelligence, public safety and security, 3D geoportals, and urban planning markets. It fuses
Weaponizing the Spectrum
 Weaponizing the Spectrum Presentation at the NDIA Disruptive Technologies Conference 4 September 2007 by Kalle R. Kontson Alion Science and Technology Phone: 240-646-3620 Email: kkontson@alionscience.com
Weaponizing the Spectrum Presentation at the NDIA Disruptive Technologies Conference 4 September 2007 by Kalle R. Kontson Alion Science and Technology Phone: 240-646-3620 Email: kkontson@alionscience.com
DARPA/DSO 101. Dr. Valerie Browning Director Defense Sciences Office. March 2018
 DARPA/DSO 101 Dr. Valerie Browning Director Defense Sciences Office March 2018 DARPA s Mission Breakthrough Technologies for National Security Communications/Networking Stealth Precision Guidance & Navigation
DARPA/DSO 101 Dr. Valerie Browning Director Defense Sciences Office March 2018 DARPA s Mission Breakthrough Technologies for National Security Communications/Networking Stealth Precision Guidance & Navigation
Partnering: Labs and Small Businesses
 Partnering: Labs and Small Businesses NATIONAL SBIR/STTR FALL CONFERENCE Nov 13, 2014 Alex Athey, Ph.D. Applied Research Laboratories The University of Texas at Austin alex.athey@arlut.utexas.edu 512-777-1616
Partnering: Labs and Small Businesses NATIONAL SBIR/STTR FALL CONFERENCE Nov 13, 2014 Alex Athey, Ph.D. Applied Research Laboratories The University of Texas at Austin alex.athey@arlut.utexas.edu 512-777-1616
UNCLASSIFIED. UNCLASSIFIED Office of Secretary Of Defense Page 1 of 5 R-1 Line #102
 Exhibit R-2, RDT&E Budget Item Justification: PB 2015 Office of Secretary Of Defense Date: March 2014 0400: Research, Development, Test & Evaluation, Defense-Wide / BA 4: Advanced Component Development
Exhibit R-2, RDT&E Budget Item Justification: PB 2015 Office of Secretary Of Defense Date: March 2014 0400: Research, Development, Test & Evaluation, Defense-Wide / BA 4: Advanced Component Development
Cooperative navigation: outline
 Positioning and Navigation in GPS-challenged Environments: Cooperative Navigation Concept Dorota A Grejner-Brzezinska, Charles K Toth, Jong-Ki Lee and Xiankun Wang Satellite Positioning and Inertial Navigation
Positioning and Navigation in GPS-challenged Environments: Cooperative Navigation Concept Dorota A Grejner-Brzezinska, Charles K Toth, Jong-Ki Lee and Xiankun Wang Satellite Positioning and Inertial Navigation
C2 Theory Overview, Recent Developments, and Way Forward
 C2 Theory Overview, Recent Developments, and Way Forward 21 st ICCRTS / 2016 KSCO London, U.K. Dr. David S. Alberts Institute for Defense Analyses 7 September 2016 Agenda What is C2 Theory? Evolution of
C2 Theory Overview, Recent Developments, and Way Forward 21 st ICCRTS / 2016 KSCO London, U.K. Dr. David S. Alberts Institute for Defense Analyses 7 September 2016 Agenda What is C2 Theory? Evolution of
DURIP Distributed SDR testbed for Collaborative Research. Wednesday, November 19, 14
 DURIP Distributed SDR testbed for Collaborative Research Distributed Software Defined Radar Testbed Collaborative research resource based on software defined radar (SDR) platforms that can adaptively modify
DURIP Distributed SDR testbed for Collaborative Research Distributed Software Defined Radar Testbed Collaborative research resource based on software defined radar (SDR) platforms that can adaptively modify
DoD Research and Engineering
 DoD Research and Engineering Defense Innovation Unit Experimental Townhall Mr. Stephen Welby Assistant Secretary of Defense for Research and Engineering February 18, 2016 Preserving Technological Superiority
DoD Research and Engineering Defense Innovation Unit Experimental Townhall Mr. Stephen Welby Assistant Secretary of Defense for Research and Engineering February 18, 2016 Preserving Technological Superiority
Special Projects Office. Mr. Lee R. Moyer Special Projects Office. DARPATech September 2000
 Mr. Lee R. Moyer DARPATech 2000 6-8 September 2000 1 CC&D Tactics Pose A Challenge to U.S. Targeting Systems The Challenge: Camouflage, Concealment and Deception techniques include: Masking: Foliage cover,
Mr. Lee R. Moyer DARPATech 2000 6-8 September 2000 1 CC&D Tactics Pose A Challenge to U.S. Targeting Systems The Challenge: Camouflage, Concealment and Deception techniques include: Masking: Foliage cover,
Robotics and Artificial Intelligence. Rodney Brooks Director, MIT Computer Science and Artificial Intelligence Laboratory CTO, irobot Corp
 Robotics and Artificial Intelligence Rodney Brooks Director, MIT Computer Science and Artificial Intelligence Laboratory CTO, irobot Corp Report Documentation Page Form Approved OMB No. 0704-0188 Public
Robotics and Artificial Intelligence Rodney Brooks Director, MIT Computer Science and Artificial Intelligence Laboratory CTO, irobot Corp Report Documentation Page Form Approved OMB No. 0704-0188 Public
Engaging with DARPA. Dr. Stefanie Tompkins. March Distribution Statement A (Approved for Public Release, Distribution Unlimited)
") Engaging with DARPA Dr. Stefanie Tompkins March 2016 DARPA s Mission: Breakthrough Technologies For National Security Communications/Networking Stealth Precision Guidance & Navigation IR Night Vision UAVs
Engaging with DARPA Dr. Stefanie Tompkins March 2016 DARPA s Mission: Breakthrough Technologies For National Security Communications/Networking Stealth Precision Guidance & Navigation IR Night Vision UAVs
Countering Weapons of Mass Destruction (CWMD) Capability Assessment Event (CAE)
 Capability Assessment Event (CAE)") Countering Weapons of Mass Destruction (CWMD) Capability Assessment Event (CAE) Overview 08-09 May 2019 Submit NLT 22 March On 08-09 May, SOFWERX, in collaboration with United States Special Operations
Countering Weapons of Mass Destruction (CWMD) Capability Assessment Event (CAE) Overview 08-09 May 2019 Submit NLT 22 March On 08-09 May, SOFWERX, in collaboration with United States Special Operations
Artificial Intelligence: Implications for Autonomous Weapons. Stuart Russell University of California, Berkeley
 Artificial Intelligence: Implications for Autonomous Weapons Stuart Russell University of California, Berkeley Outline Remit [etc] AI in the context of autonomous weapons State of the Art Likely future
Artificial Intelligence: Implications for Autonomous Weapons Stuart Russell University of California, Berkeley Outline Remit [etc] AI in the context of autonomous weapons State of the Art Likely future
CMRE La Spezia, Italy
 Innovative Interoperable M&S within Extended Maritime Domain for Critical Infrastructure Protection and C-IED CMRE La Spezia, Italy Agostino G. Bruzzone 1,2, Alberto Tremori 1 1 NATO STO CMRE& 2 Genoa
Innovative Interoperable M&S within Extended Maritime Domain for Critical Infrastructure Protection and C-IED CMRE La Spezia, Italy Agostino G. Bruzzone 1,2, Alberto Tremori 1 1 NATO STO CMRE& 2 Genoa
Defense Sciences Office
 Defense Sciences Office Dr. Bill Regli May 13, 2016 1 DARPA s Mission Breakthrough Technologies for National Security Precision Guidance & Navigation Communications/Networking IR Night Vision Stealth Radar
Defense Sciences Office Dr. Bill Regli May 13, 2016 1 DARPA s Mission Breakthrough Technologies for National Security Precision Guidance & Navigation Communications/Networking IR Night Vision Stealth Radar
Vision-based Localization and Mapping with Heterogeneous Teams of Ground and Micro Flying Robots
 Vision-based Localization and Mapping with Heterogeneous Teams of Ground and Micro Flying Robots Davide Scaramuzza Robotics and Perception Group University of Zurich http://rpg.ifi.uzh.ch All videos in
Vision-based Localization and Mapping with Heterogeneous Teams of Ground and Micro Flying Robots Davide Scaramuzza Robotics and Perception Group University of Zurich http://rpg.ifi.uzh.ch All videos in
Building the S&T Foundation for Agile Solutions
 Building the S&T Foundation for Agile Solutions C O L G A R R Y H A A S E, D I R E C T O R / C O M M A N D E R M U N I T I O N S D I R E C T O R A T E, 7 N O V E M B E R 2 0 1 8 Distribution A. Approved
Building the S&T Foundation for Agile Solutions C O L G A R R Y H A A S E, D I R E C T O R / C O M M A N D E R M U N I T I O N S D I R E C T O R A T E, 7 N O V E M B E R 2 0 1 8 Distribution A. Approved
Use of Communications EW in a Network Centric Warfare Environment
 Use of Communications EW in a Network Centric Warfare Environment TTCP EWS AG5 Brief to the 2008 AOC International Exhibition and Symposium Ian Coat EWRD, DSTO Release and Distribution This document contains
Use of Communications EW in a Network Centric Warfare Environment TTCP EWS AG5 Brief to the 2008 AOC International Exhibition and Symposium Ian Coat EWRD, DSTO Release and Distribution This document contains
Access all areas: emerging approaches for GPS-denied operations
 Access all areas: emerging approaches for GPS-denied operations [Content preview Subscribe to Jane s International Defence Review for full article] GPS jamming and spoofing have been experienced across
Access all areas: emerging approaches for GPS-denied operations [Content preview Subscribe to Jane s International Defence Review for full article] GPS jamming and spoofing have been experienced across
Engaging with DARPA. Dr. Stefanie Tompkins. February Distribution Statement A (Approved for Public Release, Distribution Unlimited)
") Engaging with DARPA Dr. Stefanie Tompkins February 2016 DARPA s Mission: Breakthrough Technologies For National Security Communications/Networking Stealth Precision Guidance & Navigation IR Night Vision
Engaging with DARPA Dr. Stefanie Tompkins February 2016 DARPA s Mission: Breakthrough Technologies For National Security Communications/Networking Stealth Precision Guidance & Navigation IR Night Vision
Prototyping: Accelerating the Adoption of Transformative Capabilities
 Prototyping: Accelerating the Adoption of Transformative Capabilities Mr. Elmer Roman Director, Joint Capability Technology Demonstration (JCTD) DASD, Emerging Capability & Prototyping (EC&P) 10/27/2016
Prototyping: Accelerating the Adoption of Transformative Capabilities Mr. Elmer Roman Director, Joint Capability Technology Demonstration (JCTD) DASD, Emerging Capability & Prototyping (EC&P) 10/27/2016
Professor Ram M. Narayanan Department of Electrical Engineering The Pennsylvania State University University Park, PA
 Professor Ram M. Narayanan Department of Electrical Engineering The Pennsylvania State University University Park, PA 16802 ram@ee.psu.edu May 23, 2011 Wireless Technologies for Small Arms 1 Objective
Professor Ram M. Narayanan Department of Electrical Engineering The Pennsylvania State University University Park, PA 16802 ram@ee.psu.edu May 23, 2011 Wireless Technologies for Small Arms 1 Objective
On January 14, 2004, the President announced a new space exploration vision for NASA
 Exploration Conference January 31, 2005 President s Vision for U.S. Space Exploration On January 14, 2004, the President announced a new space exploration vision for NASA Implement a sustained and affordable
Exploration Conference January 31, 2005 President s Vision for U.S. Space Exploration On January 14, 2004, the President announced a new space exploration vision for NASA Implement a sustained and affordable
Autonomy Test & Evaluation Verification & Validation (ATEVV) Challenge Area
 Challenge Area") Autonomy Test & Evaluation Verification & Validation (ATEVV) Challenge Area Stuart Young, ARL ATEVV Tri-Chair i NDIA National Test & Evaluation Conference 3 March 2016 Outline ATEVV Perspective on Autonomy
Autonomy Test & Evaluation Verification & Validation (ATEVV) Challenge Area Stuart Young, ARL ATEVV Tri-Chair i NDIA National Test & Evaluation Conference 3 March 2016 Outline ATEVV Perspective on Autonomy
AEROSPACE TECHNOLOGY CONGRESS 2016
 AEROSPACE TECHNOLOGY CONGRESS 2016 Exploration of Future Combat Air System () in a 2040 Perspective Stefan Andersson, Program Manager Future Combat Air System Saab Aeronautics This document and the information
AEROSPACE TECHNOLOGY CONGRESS 2016 Exploration of Future Combat Air System () in a 2040 Perspective Stefan Andersson, Program Manager Future Combat Air System Saab Aeronautics This document and the information
Advanced Robotics Introduction
 Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
Jim Kaba, Shunguang Wu, Siun-Chuon Mau, Tao Zhao Sarnoff Corporation Briefed By: Jim Kaba (609)
") Collaborative Effects of Distributed Multimodal Sensor Fusion for First Responder Navigation Jim Kaba, Shunguang Wu, Siun-Chuon Mau, Tao Zhao Sarnoff Corporation Briefed By: Jim Kaba (69) 734-2246 jkaba@sarnoff.com
Collaborative Effects of Distributed Multimodal Sensor Fusion for First Responder Navigation Jim Kaba, Shunguang Wu, Siun-Chuon Mau, Tao Zhao Sarnoff Corporation Briefed By: Jim Kaba (69) 734-2246 jkaba@sarnoff.com
Human-Robot Interaction (HRI): Achieving the Vision of Effective Soldier-Robot Teaming
: Achieving the Vision of Effective Soldier-Robot Teaming") U.S. Army Research, Development and Engineering Command Human-Robot Interaction (HRI): Achieving the Vision of Effective Soldier-Robot Teaming S.G. Hill, J. Chen, M.J. Barnes, L.R. Elliott, T.D. Kelley,
U.S. Army Research, Development and Engineering Command Human-Robot Interaction (HRI): Achieving the Vision of Effective Soldier-Robot Teaming S.G. Hill, J. Chen, M.J. Barnes, L.R. Elliott, T.D. Kelley,
UNCLASSIFIED )UNCLASSIFIED
UNCLASSIFIED") (U) COST: (Dollars in Thousands) PROJECT NUMBER & TITLE FY 2000 ACTUAL FY 2001 ESTIMATE FY 2002 ESTIMATE ** ** 62,141 ** The Science and Technology Program Elements (PEs) were restructured in FY 2002.
(U) COST: (Dollars in Thousands) PROJECT NUMBER & TITLE FY 2000 ACTUAL FY 2001 ESTIMATE FY 2002 ESTIMATE ** ** 62,141 ** The Science and Technology Program Elements (PEs) were restructured in FY 2002.
WOLF - Wireless robust Link for urban Forces operations
 Executive summary - rev B - 01/05/2011 WOLF - Wireless robust Link for urban Forces operations The WOLF project, funded under the 2nd call for proposals of Joint Investment Program on Force Protection
Executive summary - rev B - 01/05/2011 WOLF - Wireless robust Link for urban Forces operations The WOLF project, funded under the 2nd call for proposals of Joint Investment Program on Force Protection
Tailored Tactical Surveillance
 Mr. Tim Clark Program Manager Special Projects Office At our last DARPATech, the Special Projects Office (SPO) discussed the need for persistent global and theater surveillance and how, by advancing the
Mr. Tim Clark Program Manager Special Projects Office At our last DARPATech, the Special Projects Office (SPO) discussed the need for persistent global and theater surveillance and how, by advancing the
Autonomy Technology Research Center Collaboration with Air Force Research Laboratory Sensors Directorate and Wright State University
 I n t e g r i t y - S e r v i c e - E x c e l l e n c e Autonomy Technology Research Center Collaboration with Air Force Research Laboratory Sensors Directorate and Wright State University AFRL Sensors
I n t e g r i t y - S e r v i c e - E x c e l l e n c e Autonomy Technology Research Center Collaboration with Air Force Research Laboratory Sensors Directorate and Wright State University AFRL Sensors
Overview of the Carnegie Mellon University Robotics Institute DOE Traineeship in Environmental Management 17493
 Overview of the Carnegie Mellon University Robotics Institute DOE Traineeship in Environmental Management 17493 ABSTRACT Nathan Michael *, William Whittaker *, Martial Hebert * * Carnegie Mellon University
Overview of the Carnegie Mellon University Robotics Institute DOE Traineeship in Environmental Management 17493 ABSTRACT Nathan Michael *, William Whittaker *, Martial Hebert * * Carnegie Mellon University
Mission Specification and Control for Unmanned Aerial and Ground Vehicles for Indoor Target Discovery and Tracking
 Mission Specification and Control for Unmanned Aerial and Ground Vehicles for Indoor Discovery and Tracking Patrick D. Ulam a, Zsolt Kira* a, Ronald C. Arkin a, Thomas R. Collins b a Mobile Robot Laboratory,
Mission Specification and Control for Unmanned Aerial and Ground Vehicles for Indoor Discovery and Tracking Patrick D. Ulam a, Zsolt Kira* a, Ronald C. Arkin a, Thomas R. Collins b a Mobile Robot Laboratory,
ILA Berlin Air Show 2016
 http://www.tencate.com/emea/images/milipol_paris_201328-2402328-25603.jpgv ILA Berlin Air Show 2016 Dear Customers and Business Partners, June 1 to 4, 2016 Berlin ExpoCenter Airport Hall 2, booth 319 The
http://www.tencate.com/emea/images/milipol_paris_201328-2402328-25603.jpgv ILA Berlin Air Show 2016 Dear Customers and Business Partners, June 1 to 4, 2016 Berlin ExpoCenter Airport Hall 2, booth 319 The
Advanced Robotics Introduction
 Advanced Robotics Introduction Institute for Software Technology 1 Agenda Motivation Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 Bridge the Gap Mobile
Advanced Robotics Introduction Institute for Software Technology 1 Agenda Motivation Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 Bridge the Gap Mobile
UNCLASSIFIED. UNCLASSIFIED R-1 Line Item #13 Page 1 of 11
 Exhibit R-2, PB 2010 Air Force RDT&E Budget Item Justification DATE: May 2009 Applied Research COST ($ in Millions) FY 2008 Actual FY 2009 FY 2010 FY 2011 FY 2012 FY 2013 FY 2014 FY 2015 Cost To Complete
Exhibit R-2, PB 2010 Air Force RDT&E Budget Item Justification DATE: May 2009 Applied Research COST ($ in Millions) FY 2008 Actual FY 2009 FY 2010 FY 2011 FY 2012 FY 2013 FY 2014 FY 2015 Cost To Complete
Autonomous Control for Unmanned
 Autonomous Control for Unmanned Surface Vehicles December 8, 2016 Carl Conti, CAPT, USN (Ret) Spatial Integrated Systems, Inc. SIS Corporate Profile Small Business founded in 1997, focusing on Research,
Autonomous Control for Unmanned Surface Vehicles December 8, 2016 Carl Conti, CAPT, USN (Ret) Spatial Integrated Systems, Inc. SIS Corporate Profile Small Business founded in 1997, focusing on Research,
Defense Advanced Research Projects Agency (DARPA)
") Defense Advanced Research Projects Agency (DARPA) Mr. Jean-Charles (J.C.) Ledé Tactical Technology Office Program Manager Briefing prepared for Kingston Conference on International Security 12 May, 2015
Defense Advanced Research Projects Agency (DARPA) Mr. Jean-Charles (J.C.) Ledé Tactical Technology Office Program Manager Briefing prepared for Kingston Conference on International Security 12 May, 2015
Army Acoustics Needs
 Army Acoustics Needs DARPA Air-Coupled Acoustic Micro Sensors Workshop by Nino Srour Aug 25, 1999 US Attn: AMSRL-SE-SA 2800 Powder Mill Road Adelphi, MD 20783-1197 Tel: (301) 394-2623 Email: nsrour@arl.mil
Army Acoustics Needs DARPA Air-Coupled Acoustic Micro Sensors Workshop by Nino Srour Aug 25, 1999 US Attn: AMSRL-SE-SA 2800 Powder Mill Road Adelphi, MD 20783-1197 Tel: (301) 394-2623 Email: nsrour@arl.mil
Cooperative navigation (part II)
") Cooperative navigation (part II) An example using foot-mounted INS and UWB-transceivers Jouni Rantakokko Aim Increased accuracy during long-term operations in GNSS-challenged environments for - First responders
Cooperative navigation (part II) An example using foot-mounted INS and UWB-transceivers Jouni Rantakokko Aim Increased accuracy during long-term operations in GNSS-challenged environments for - First responders
Artificial Intelligence: Implications for Autonomous Weapons. Stuart Russell University of California, Berkeley
 Artificial Intelligence: Implications for Autonomous Weapons Stuart Russell University of California, Berkeley Outline AI and autonomy State of the art Likely future developments Conclusions What is AI?
Artificial Intelligence: Implications for Autonomous Weapons Stuart Russell University of California, Berkeley Outline AI and autonomy State of the art Likely future developments Conclusions What is AI?
Autonomous Tactical Communications
 Autonomous Tactical Communications Possibilities and Problems Lars Ahlin Jens Zander Div. of Communication Systems, Radio Communication Systems Department of Command and Dept. of Signals, Sensors and Systems
Autonomous Tactical Communications Possibilities and Problems Lars Ahlin Jens Zander Div. of Communication Systems, Radio Communication Systems Department of Command and Dept. of Signals, Sensors and Systems
Position, Navigation, and Timing Branch C2D, Battle Command Division Fort Monmouth, NJ
 Position, Navigation, and Timing Branch C2D, Battle Command Division Fort Monmouth, NJ Soldier Navigation Architecture Study Presented by Van Tran / Gina Guiducci August 3, 2009 Who We Are Department of
Position, Navigation, and Timing Branch C2D, Battle Command Division Fort Monmouth, NJ Soldier Navigation Architecture Study Presented by Van Tran / Gina Guiducci August 3, 2009 Who We Are Department of
Moving Link 16 to the Tactical Edge
 Moving Link 16 to the Tactical Edge TDL Summit Canberra, Australia November 2016 Michael Kocin And Janet Mackett Copyright 2016 ViaSat, Inc., All rights Reserved VIASAT PROPRIETARY: This material contains
Moving Link 16 to the Tactical Edge TDL Summit Canberra, Australia November 2016 Michael Kocin And Janet Mackett Copyright 2016 ViaSat, Inc., All rights Reserved VIASAT PROPRIETARY: This material contains
UNCLASSIFIED R-1 ITEM NOMENCLATURE. FY 2014 FY 2014 OCO ## Total FY 2015 FY 2016 FY 2017 FY 2018
 Exhibit R-2, RDT&E Budget Item Justification: PB 2014 Office of Secretary Of Defense DATE: April 2013 COST ($ in Millions) All Prior FY 2014 Years FY 2012 FY 2013 # Base FY 2014 FY 2014 OCO ## Total FY
Exhibit R-2, RDT&E Budget Item Justification: PB 2014 Office of Secretary Of Defense DATE: April 2013 COST ($ in Millions) All Prior FY 2014 Years FY 2012 FY 2013 # Base FY 2014 FY 2014 OCO ## Total FY
Advancing Autonomy on Man Portable Robots. Brandon Sights SPAWAR Systems Center, San Diego May 14, 2008
 Advancing Autonomy on Man Portable Robots Brandon Sights SPAWAR Systems Center, San Diego May 14, 2008 Report Documentation Page Form Approved OMB No. 0704-0188 Public reporting burden for the collection
Advancing Autonomy on Man Portable Robots Brandon Sights SPAWAR Systems Center, San Diego May 14, 2008 Report Documentation Page Form Approved OMB No. 0704-0188 Public reporting burden for the collection
Collective Robotics. Marcin Pilat
 Collective Robotics Marcin Pilat Introduction Painting a room Complex behaviors: Perceptions, deductions, motivations, choices Robotics: Past: single robot Future: multiple, simple robots working in teams
Collective Robotics Marcin Pilat Introduction Painting a room Complex behaviors: Perceptions, deductions, motivations, choices Robotics: Past: single robot Future: multiple, simple robots working in teams
DoD Research and Engineering
 DoD Research and Engineering 2016 Ground Robotics Capabilities Conference National Defense Industrial Association Dr. Melissa Flagg Deputy Assistant Secretary of Defense for Research March 3, 2016 Defense
DoD Research and Engineering 2016 Ground Robotics Capabilities Conference National Defense Industrial Association Dr. Melissa Flagg Deputy Assistant Secretary of Defense for Research March 3, 2016 Defense
Air Force Research Laboratory
 Air Force Research Laboratory AFRL Sensors Directorate Overview 24 July 2012 Integrity Service Excellence Dr Kenneth L Schepler Senior International Focal Point Sensors Directorate Air Force Research Laboratory
Air Force Research Laboratory AFRL Sensors Directorate Overview 24 July 2012 Integrity Service Excellence Dr Kenneth L Schepler Senior International Focal Point Sensors Directorate Air Force Research Laboratory
NCCT IEEE PROJECTS ADVANCED ROBOTICS SOLUTIONS. Latest Projects, in various Domains. Promise for the Best Projects
 NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
IDEaS INNOVATION FOR DEFENCE EXCELLENCE AND SECURITY PROTECTION SECURITE ENGAGEMENT STRONG SECURE ENGAGED
 IDEaS INNOVATION FOR DEFENCE EXCELLENCE AND SECURITY STRONG SECURE ENGAGED PROTECTION SECURITE ENGAGEMENT New Defence Perspective Innovative technology, knowledge, problem solving are critical for Canada
IDEaS INNOVATION FOR DEFENCE EXCELLENCE AND SECURITY STRONG SECURE ENGAGED PROTECTION SECURITE ENGAGEMENT New Defence Perspective Innovative technology, knowledge, problem solving are critical for Canada
Author s Name Name of the Paper Session. DYNAMIC POSITIONING CONFERENCE October 10-11, 2017 SENSORS SESSION. Sensing Autonomy.
 Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 10-11, 2017 SENSORS SESSION Sensing Autonomy By Arne Rinnan Kongsberg Seatex AS Abstract A certain level of autonomy is already
Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 10-11, 2017 SENSORS SESSION Sensing Autonomy By Arne Rinnan Kongsberg Seatex AS Abstract A certain level of autonomy is already
AFRL. Technology Directorates AFRL
 Sensors Directorate and ATR Overview for Integrated Fusion, Performance Prediction, and Sensor Management for ATE MURI 21 July 2006 Lori Westerkamp Sensor ATR Technology Division Sensors Directorate Air
Sensors Directorate and ATR Overview for Integrated Fusion, Performance Prediction, and Sensor Management for ATE MURI 21 July 2006 Lori Westerkamp Sensor ATR Technology Division Sensors Directorate Air
TETRA in use by the Military. K.-H. (Charly) Hengevoß Board Member TETRA MoU Association
 Hengevoß Board Member TETRA MoU Association") TETRA in use by the Military K.-H. (Charly) Hengevoß Board Member TETRA MoU Association Agenda The National TETRA concept of the Finish Defence Force Deployable TETRA systems on the military battlefield
TETRA in use by the Military K.-H. (Charly) Hengevoß Board Member TETRA MoU Association Agenda The National TETRA concept of the Finish Defence Force Deployable TETRA systems on the military battlefield
Multi-Functional Materials for Defense DoD Perspective on Sensing
 Multi-Functional Materials for Defense DoD Perspective on Sensing William Nothwang Micro & Nano Materials & Devices Branch Sensors and Electron Devices Directorate Army Research Laboratory Report Documentation
Multi-Functional Materials for Defense DoD Perspective on Sensing William Nothwang Micro & Nano Materials & Devices Branch Sensors and Electron Devices Directorate Army Research Laboratory Report Documentation
Experimental Study of Autonomous Target Pursuit with a Micro Fixed Wing Aircraft
 Experimental Study of Autonomous Target Pursuit with a Micro Fixed Wing Aircraft Stanley Ng, Frank Lanke Fu Tarimo, and Mac Schwager Mechanical Engineering Department, Boston University, Boston, MA, 02215
Experimental Study of Autonomous Target Pursuit with a Micro Fixed Wing Aircraft Stanley Ng, Frank Lanke Fu Tarimo, and Mac Schwager Mechanical Engineering Department, Boston University, Boston, MA, 02215
The U.S. Army Research Laboratory s Open Campus: Redefining Defense Research
 The U.S. Army Research Laboratory s Open Campus: Redefining Defense Research Dr. Joseph N. Mait Chief Scientist U.S. Army Research Laboratory U.S. Army Research, Development and Engineering Command U.S.
The U.S. Army Research Laboratory s Open Campus: Redefining Defense Research Dr. Joseph N. Mait Chief Scientist U.S. Army Research Laboratory U.S. Army Research, Development and Engineering Command U.S.
Applied Robotics for Installations and Base Operations (ARIBO)
") Applied Robotics for Installations and Base Operations (ARIBO) Overview January, 2016 Edward Straub, DM U.S. Army TARDEC, Ground Vehicle Robotics edward.r.straub2.civ@mail.mil ARIBO Overview 1 ARIBO Strategic
Applied Robotics for Installations and Base Operations (ARIBO) Overview January, 2016 Edward Straub, DM U.S. Army TARDEC, Ground Vehicle Robotics edward.r.straub2.civ@mail.mil ARIBO Overview 1 ARIBO Strategic
AN AUTONOMOUS SIMULATION BASED SYSTEM FOR ROBOTIC SERVICES IN PARTIALLY KNOWN ENVIRONMENTS
 AN AUTONOMOUS SIMULATION BASED SYSTEM FOR ROBOTIC SERVICES IN PARTIALLY KNOWN ENVIRONMENTS Eva Cipi, PhD in Computer Engineering University of Vlora, Albania Abstract This paper is focused on presenting
AN AUTONOMOUS SIMULATION BASED SYSTEM FOR ROBOTIC SERVICES IN PARTIALLY KNOWN ENVIRONMENTS Eva Cipi, PhD in Computer Engineering University of Vlora, Albania Abstract This paper is focused on presenting
A Personal Perspective on the IT R&D Ecosystem. Dr. André van Tilborg Deputy Under Secretary of Defense (Science & Technology)
") A Personal Perspective on the IT R&D Ecosystem Dr. André van Tilborg Deputy Under Secretary of Defense (Science & Technology) November 2, 2006 Questions to Consider What are your agency s investment philosophy,
A Personal Perspective on the IT R&D Ecosystem Dr. André van Tilborg Deputy Under Secretary of Defense (Science & Technology) November 2, 2006 Questions to Consider What are your agency s investment philosophy,
NAVY OPERATING CONCEPT (CURRENT & FUTURE READINESS)
") NAVAL AVIATION ENTERPRISE SCIENCE & TECHNOLOGY PROGRAM DR. JOHN FISCHER NAVAL AIR SYSTEMS COMMAND 29 NOVEMBER 2006 NAVY OPERATING CONCEPT (CURRENT & FUTURE READINESS) PROVIDERS / ENABLERS (SUPPORTING WARFARE
NAVAL AVIATION ENTERPRISE SCIENCE & TECHNOLOGY PROGRAM DR. JOHN FISCHER NAVAL AIR SYSTEMS COMMAND 29 NOVEMBER 2006 NAVY OPERATING CONCEPT (CURRENT & FUTURE READINESS) PROVIDERS / ENABLERS (SUPPORTING WARFARE
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
* Intelli Robotic Wheel Chair for Specialty Operations & Physically Challenged
 ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing