Towards a dynamic balance between humans and machines: Authority, ability, responsibility and control in cooperative control situations
|
|
|
- Gavin Summers
- 6 years ago
- Views:
Transcription


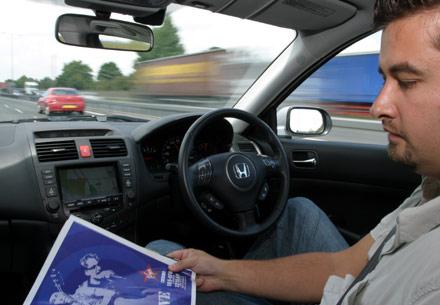
1 Towards a dynamic balance between humans and machines: Authority, ability, responsibility and control in cooperative control situations Frank Flemisch, Matthias Heesen, Johann Kelsch, Johannes Beller ITS Institute of Transportation Systems Braunschweig Folie 1




2 Background: Assistance & Automation in movement control? Folie 2
3 Manual versus robotic guidance and control guidance guidance control control Folie 3
4 On/Off automation Folie 4
5 Supervisory Control perceives perceives Folie 5
6 Shared & Cooperative Control as a co-agency guidance perceives control perceives Folie 6







7 Cooperative Control: Examples of everydays lifes Folie 7
8 Cooperative Control guidance control Folie 8

9 Video Folie 9
 Folie")
10 Video in SmpLab (MaxTension) Folie 10
11 From authority, ability, control, responsibility to action Offline (Meta System) Online (Human Machine System) Authority: Who is allowed to do what and when? Time Ability: Who is able to do what and when? Control: Action: Who does what and when? To be in control = (dynamically allocated) authority + ability Responsibility: Who gets the blame or fame? Folie 11
12 Authority, ability, responsibility double- and triple binds Offline (Meta System) Online (Human Machine System) Authority Act only, if you have authority + ability Ability Control Action Responsibility make only sense, if authority + ability (+ action) Responsibility Time Folie 12
13 Authority, ability, responsibility and control in metasystem and human machine system Society Challenge for consistency between Authority ability responsibility Danger of inconsistency / mismatch Laws? Human Abilities? Concepts? Guidelines? perceives perceives Scientific community Design & Development Team(s) Folie 13
14 The key to consistency: Shared mental models Folie 14



15 Example for Shared mental models, a key to consistency: Assistance and automation scale, a simplified model of control distribution Folie 15
16 Spectrum / scale of assistance and automation manual assisted semi automated highly automated autonomous fully automated Folie 16


17 HAVEit Joint System: Interaction & display schemes Folie 17




18 Transitions in control / authority trading are the critical issue Operator initiates transitions manual assisted semi automated highly automated autonomous fully automated Automation initiates transitions Folie 18
19 A key to successful control situations and transitions: Consistency of Mental models about control (control SA) Folie 19
20 Inconsistent control situation: Control Vacuum control vacuum Folie 20
21 Inconsistent control situation: Control Surplus / excess control surplus Humans mental model of control distribution Folie 21
22 Tracking the authority allocation / transitions: (Schieben et al. 2009) Folie 22
23 The key to consistency: A Shared mental model Folie 23

24 The key to consistency about authority, ability, responsibility: Role models / metaphors (example Desktop metaphor) Folie 24
25 Cooperative Control: Examples of everydays lifes Folie 25
26 The key to a consistency of Mental models about authority, ability, control and responsibility: Role models / metaphors (example H-Metaphor) Folie 26
27 Tight Rein Loose Rein manual assisted semi automated highly automated autonomous fully automated Folie 27
28 Summary: Authority, ability, responsibility and control in cooperative control situations - Cooperative control is one way to instantiate co-agency - Authority, ability, control and responsibility are key concepts to co-agency - Control = (dynamically allocated) authority + ability - In certain cases it can make sense to give machines a high authority - Transitions of control are crucial - Meta-System and human machine system are strongly connected - Challenge of consistency between authority ability responsibility (avoid violations of double or triple binds) Folie 28
29 Authority, ability, responsibility and control in cooperative control situations - Need for - Schemes of dynamic control allocation / authority trading - Role models - Guidelines from scientific community (e.g. Etiquette Miller et al.) - Rules from society (e.g. Rules of Assistance and Automation in accordance to Rules of Robotics, e.g. Murphy & Woods 2009) - Authority distribution can be dynamic, but with stable limits Dynamic balance between human and machine - Authority and control distribution between human and machine should not only be a matter of technical and psychological feasibility, but a conscious design decision. Who do we want to be with technology? Folie 29
30 Some references Flemisch, F.; Heesen, M.; Kelsch, J.; Schindler, J.; Preusche, C.; Dittrich, J.: Shared and cooperative movement control of intelligent technical systems: Sketch of the design space of haptic-multimodal coupling between operator, co-automation, base system and environment; The 11th IFAC/IFIP/IFORS/IEA Symposium on Analysis, Design, and Evaluation of Human-Machine Systems; Valenciennes, France, 2010 Flemisch, F.; Schieben, A.(Ed.): Validation of preliminary design of HAVEit systems by simulation (Del. 33.3). Public deliverable to the EUcommission; Brussels; 2010 Heesen, M.; Kelsch, J.; Löper, C.; Flemisch, F.: Haptisch-multimodale Interaktion für hochautomatisierte, kooperative Fahrzeugführung bei Fahrstreifenwechsel-, Brems- und Ausweichmanövern; Gesamtzentrum für Verkehr Braunschweig (Hrsg.): Automatisierungs-, Assistenzsysteme und eingebettete Systeme für Transportmittel AAET, Braunschweig, 2010 Flemisch, F. Nashashibi, F., Glaser, S.; Rauch, N; Temme, T., Resende, P., Vanholme, B.; Schieben, A.; Löper, C., Thomaidis, G.;, Kaussner, A.: Towards a Highly Automated Driving: Intermediate report on the HAVEIt-Joint System; Transport Research Arena, Brussels, 2010 (Accepted) Damböck, D.; Flemisch, F.; Kienle, M.; Schieben, A.; Heesen, M.; Bengler, K.: Vom Assistierten zum Hochautomatisiertem Fahren; Zwischenbericht 2009 aus den Projekten DFG-H-Mode und EU-HAVEit; VDI Fahrer im 21. Jhd.; Braunschweig, 2009 Kienle, M.; Damböck, D.; Kelsch, J.; Flemisch, F.; Bengler, K.: Towards an H-Mode for highly automated vehicles: Driving with side sticks; Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI); Essen; 2009 Schieben, A.; Flemisch, F.; Martens, M.; Wilschut, E.; Rambaldini, A.; Toffetti, A.; Turi, G.; Arduino, C.; Merat, N.; Jamson, H.: CityMobil, Human Factors design and test results of HMI in use on cars and with simulators; Public deliverable of the EU-IP CityMobil, Braunschweig, 2009 Hoeger, R.; Amditis A., Kunert M.; Hoess, A.; Flemisch, F.; Krueger, H.-P.; Bartels, A.; Beutner, A.: HIGHLY AUTOMATED VEHICLES FOR INTELLIGENT TRANSPORT: HAVEit APPROACH; ITS World Congress, NY, USA, 2008 Flemisch, F.; Kelsch, J.; Löper, C.; Schieben, A.; Schindler, J.; Heesen, M.: Cooperative Control and Active Interfaces for Vehicle Assistance and Automation; FISITA World automotive Congress; Munich; 2008 Flemisch, F.; Schindler, J.; Kelsch, J.; Schieben, A.; Damböck, D.: Some Bridging Methods towards a Balanced Design of Human-Machine Systems, Applied to Highly Automated Vehicles; Applied Ergonomics International Conference, Las Vegas, USA; 2008 Flemisch, F.; Schieben, A.; Kelsch, J.; Löper, C.: Automation spectrum, inner / outer compatibility and other potentially useful human factors concepts for assistance and automation; In: Ed. Waard, D.; Flemisch, F.; Lorenz, B.; Oberheid, H.; Brookhuis, K. Human Factors for Assistance and Automation; Shaker, Maastricht, 2008 Flemisch, F.O.; Adams, C. A.; Conway S. R.; Goodrich K. H.; Palmer M. T. ; Schutte P. C.: The H-Metaphor as a guideline for vehicle automation and interaction; NASA/TM ; NASA Langley Research Center; Hampton, Va, USA; 2003 Folie 30


31 Towards a dynamic balance between humans and machines: Authority, ability, responsibility and control in cooperative control situations Frank Flemisch, Matthias Heesen, Johann Kelsch, Johannes Beller ITS Institute of Transportation Systems Braunschweig guidance Cooperative Control Operator initiates transitions control manual assisted semi automated highly automated autonomous fully automated Automation initiates transitions design Design Team Folie 31
Highly automated driving InteractIVe Summerschool Tobias Hesse & Anna Schieben. German Aerospace Center, Institute of Transportation Systems
 Highly automated driving InteractIVe Summerschool 2012 Tobias Hesse & Anna Schieben German Aerospace Center, Institute of Transportation Systems Highly automated driving > InteractIVe Summerschool 4.-6.
Highly automated driving InteractIVe Summerschool 2012 Tobias Hesse & Anna Schieben German Aerospace Center, Institute of Transportation Systems Highly automated driving > InteractIVe Summerschool 4.-6.
Towards Highly Automated Driving: Intermediate report on the HAVEit-Joint System
 Towards Highly Automated Driving: Intermediate report on the HAVEit-Joint System Frank Flemisch, Fawzi Nashashibi, Nadja Rauch, Anna Schieben, Sebastien Glaser, Gerald Temme, Paulo Resende, Benoit Vanholme,
Towards Highly Automated Driving: Intermediate report on the HAVEit-Joint System Frank Flemisch, Fawzi Nashashibi, Nadja Rauch, Anna Schieben, Sebastien Glaser, Gerald Temme, Paulo Resende, Benoit Vanholme,
The future of driving.
 Highly automated vehicles for intelligent transport 7th Framework programme ICT-2007.6.1 ICT for intelligent vehicles and mobility services Grant agreement no.: 212154 The future of driving. Deliverable
Highly automated vehicles for intelligent transport 7th Framework programme ICT-2007.6.1 ICT for intelligent vehicles and mobility services Grant agreement no.: 212154 The future of driving. Deliverable
Towards a dynamic balance between humans and automation: authority, ability, responsibility and control in shared and cooperative control situations
 ogn Tech Work (2012) 14:3 18 DOI 10.1007/s10111-011-0191-6 OIGINAL ATILE Towards a dynamic balance between humans and automation: authority, ability, responsibility and control in shared and cooperative
ogn Tech Work (2012) 14:3 18 DOI 10.1007/s10111-011-0191-6 OIGINAL ATILE Towards a dynamic balance between humans and automation: authority, ability, responsibility and control in shared and cooperative
Automation spectrum, inner / outer compatibility and other potentially useful human factors concepts for assistance and automation
 Automation spectrum, inner / outer compatibility and other potentially useful human factors concepts for assistance and automation Frank Flemisch, Johann Kelsch, Christian Löper, Anna Schieben, & Julian
Automation spectrum, inner / outer compatibility and other potentially useful human factors concepts for assistance and automation Frank Flemisch, Johann Kelsch, Christian Löper, Anna Schieben, & Julian
Some Bridging Methods towards a Balanced Design of Human-Machine Systems, Applied to Highly Automated Vehicles
 Applied Ergonomics International Conference, Las Vegas, USA; 2008 Some Bridging Methods towards a Balanced Design of Human-Machine Systems, Applied to Highly Automated Vehicles Flemisch, Frank O. Kelsch,
Applied Ergonomics International Conference, Las Vegas, USA; 2008 Some Bridging Methods towards a Balanced Design of Human-Machine Systems, Applied to Highly Automated Vehicles Flemisch, Frank O. Kelsch,
Interaction design for nomadic devices in highly automated vehicles
 Interaction design for nomadic devices in highly automated vehicles Stephan Lapoehn, Marc Dziennus, Fabian Utesch, Johann Kelsch, Anna Schieben, Mandy Dotzauer, Tobias Hesse, Frank Köster Institute of
Interaction design for nomadic devices in highly automated vehicles Stephan Lapoehn, Marc Dziennus, Fabian Utesch, Johann Kelsch, Anna Schieben, Mandy Dotzauer, Tobias Hesse, Frank Köster Institute of
Situation Assessment at Intersections for Driver Assistance and Automated Vehicle Control
 C URRICULUM V ITAE Dr. Thomas Streubel 2018-11-27 Current position since 08/2017 Chalmers University of Technology, Gothenburg, Sweden Dept. Mechanics and Maritime Sciences / Division Vehicle Safety Postdoctoral
C URRICULUM V ITAE Dr. Thomas Streubel 2018-11-27 Current position since 08/2017 Chalmers University of Technology, Gothenburg, Sweden Dept. Mechanics and Maritime Sciences / Division Vehicle Safety Postdoctoral
Early Take-Over Preparation in Stereoscopic 3D
 Adjunct Proceedings of the 10th International ACM Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI 18), September 23 25, 2018, Toronto, Canada. Early Take-Over
Adjunct Proceedings of the 10th International ACM Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI 18), September 23 25, 2018, Toronto, Canada. Early Take-Over
What would drivers like to know during automated driving? Information needs at different levels of automation.
 What would drivers like to know during automated driving? Information needs at different levels of automation. Beggiato, Matthias 1 ; Hartwich, Franziska 1 ; Schleinitz, Katja 1 ; Krems, Josef 1 ; Othersen,
What would drivers like to know during automated driving? Information needs at different levels of automation. Beggiato, Matthias 1 ; Hartwich, Franziska 1 ; Schleinitz, Katja 1 ; Krems, Josef 1 ; Othersen,
COPING WITH COMPLEX DRIVING SCENARIOS: EXPLORATORY SCENARIO DESIGN
 Paris, France, September 4-5, 2014 COPING WITH COMPLEX DRIVING SCENARIOS: EXPLORATORY SCENARIO DESIGN Julian Schindler 1, Tobias Hesse 1 (1) : German Aerospace Center, Lilienthalplatz 7, 38108 Braunschweig,
Paris, France, September 4-5, 2014 COPING WITH COMPLEX DRIVING SCENARIOS: EXPLORATORY SCENARIO DESIGN Julian Schindler 1, Tobias Hesse 1 (1) : German Aerospace Center, Lilienthalplatz 7, 38108 Braunschweig,
This is a repository copy of Human factors implications of vehicle automation: Current understanding and future directions.
 This is a repository copy of Human factors implications of vehicle automation: Current understanding and future directions. White Rose Research Online URL for this paper: http://eprints.whiterose.ac.uk/84457/
This is a repository copy of Human factors implications of vehicle automation: Current understanding and future directions. White Rose Research Online URL for this paper: http://eprints.whiterose.ac.uk/84457/
HUMAN FACTORS IN VEHICLE AUTOMATION
 Emma Johansson HUMAN FACTORS IN VEHICLE AUTOMATION - Activities in the European project AdaptIVe Vehicle and Road Automation (VRA) Webinar 10 October 2014 // Outline AdaptIVe short overview Collaborative
Emma Johansson HUMAN FACTORS IN VEHICLE AUTOMATION - Activities in the European project AdaptIVe Vehicle and Road Automation (VRA) Webinar 10 October 2014 // Outline AdaptIVe short overview Collaborative
Available online at ScienceDirect. Transportation Research Procedia 14 (2016 )
") Available online at www.sciencedirect.com ScienceDirect Transportation Research Procedia 14 (2016 ) 2197 2206 6th Transport Research Arena April 18-21, 2016 Test site AIM toolbox and enabler for applied
Available online at www.sciencedirect.com ScienceDirect Transportation Research Procedia 14 (2016 ) 2197 2206 6th Transport Research Arena April 18-21, 2016 Test site AIM toolbox and enabler for applied
WB2306 The Human Controller
 Simulation WB2306 The Human Controller Class 1. General Introduction Adapt the device to the human, not the human to the device! Teacher: David ABBINK Assistant professor at Delft Haptics Lab (www.delfthapticslab.nl)
Simulation WB2306 The Human Controller Class 1. General Introduction Adapt the device to the human, not the human to the device! Teacher: David ABBINK Assistant professor at Delft Haptics Lab (www.delfthapticslab.nl)
Auto und Umwelt - das Auto als Plattform für Interaktive
 Der Fahrer im Dialog mit Auto und Umwelt - das Auto als Plattform für Interaktive Anwendungen Prof. Dr. Albrecht Schmidt Pervasive Computing University Duisburg-Essen http://www.pervasive.wiwi.uni-due.de/
Der Fahrer im Dialog mit Auto und Umwelt - das Auto als Plattform für Interaktive Anwendungen Prof. Dr. Albrecht Schmidt Pervasive Computing University Duisburg-Essen http://www.pervasive.wiwi.uni-due.de/
Designing an HMI for ASAS in respect of situation awareness
 RESEARCH GRANT SCHEME DELFT Contract reference number 08-120917-C EEC contact person: Garfield Dean Designing an HMI for ASAS in respect of situation awareness Ecological ASAS Interfaces 2010 Midterm Progress
RESEARCH GRANT SCHEME DELFT Contract reference number 08-120917-C EEC contact person: Garfield Dean Designing an HMI for ASAS in respect of situation awareness Ecological ASAS Interfaces 2010 Midterm Progress
EUROPEAN COMMISSION DG RESEARCH
 EUROPEAN COMMISSION DG RESEARCH SIXTH FRAMEWORK PROGRAMME THEMATIC PRIORITY 1.6 SUSTAINABLE DEVELOPMENT, GLOBAL CHANGE & ECOSYSTEMS INTEGRATED PROJECT CONTRACT N. 031315 Human Factors aspects in automated
EUROPEAN COMMISSION DG RESEARCH SIXTH FRAMEWORK PROGRAMME THEMATIC PRIORITY 1.6 SUSTAINABLE DEVELOPMENT, GLOBAL CHANGE & ECOSYSTEMS INTEGRATED PROJECT CONTRACT N. 031315 Human Factors aspects in automated
Building Spatial Experiences in the Automotive Industry
 Building Spatial Experiences in the Automotive Industry i-know Data-driven Business Conference Franz Weghofer franz.weghofer@magna.com Video Agenda Digital Factory - Data Backbone of all Virtual Representations
Building Spatial Experiences in the Automotive Industry i-know Data-driven Business Conference Franz Weghofer franz.weghofer@magna.com Video Agenda Digital Factory - Data Backbone of all Virtual Representations
Field Operational Test of a new Delay-Based Traffic Signal Control Using C2I Communication Technology
 Field Operational Test of a new Delay-Based Traffic Signal Control Using C2I Communication Technology Robert Oertel Rutherfordstr. 2, 12489 Berlin, Germany Tobias Frankiewicz Lilienthalplatz 7, 38108 Braunschweig,
Field Operational Test of a new Delay-Based Traffic Signal Control Using C2I Communication Technology Robert Oertel Rutherfordstr. 2, 12489 Berlin, Germany Tobias Frankiewicz Lilienthalplatz 7, 38108 Braunschweig,
HAVEit Highly Automated Vehicles for Intelligent Transport
 HAVEit Highly Automated Vehicles for Intelligent Transport Holger Zeng Project Manager CONTINENTAL AUTOMOTIVE HAVEit General Information Project full title: Highly Automated Vehicles for Intelligent Transport
HAVEit Highly Automated Vehicles for Intelligent Transport Holger Zeng Project Manager CONTINENTAL AUTOMOTIVE HAVEit General Information Project full title: Highly Automated Vehicles for Intelligent Transport
A SERVICE-ORIENTED SYSTEM ARCHITECTURE FOR THE HUMAN CENTERED DESIGN OF INTELLIGENT TRANSPORTATION SYSTEMS
 Tools and methodologies for ITS design and drivers awareness A SERVICE-ORIENTED SYSTEM ARCHITECTURE FOR THE HUMAN CENTERED DESIGN OF INTELLIGENT TRANSPORTATION SYSTEMS Jan Gačnik, Oliver Häger, Marco Hannibal
Tools and methodologies for ITS design and drivers awareness A SERVICE-ORIENTED SYSTEM ARCHITECTURE FOR THE HUMAN CENTERED DESIGN OF INTELLIGENT TRANSPORTATION SYSTEMS Jan Gačnik, Oliver Häger, Marco Hannibal
Wearable Technologies for Automotive User Interfaces: Danger or Opportunity?
 Wearable Technologies for Automotive User Interfaces: Danger or Opportunity? Maurizio Caon maurizio.caon@hes-so.ch Leonardo Angelini leonardo.angelini@hes-so.ch Elena Mugellini elena.mugellini@hes-so.ch
Wearable Technologies for Automotive User Interfaces: Danger or Opportunity? Maurizio Caon maurizio.caon@hes-so.ch Leonardo Angelini leonardo.angelini@hes-so.ch Elena Mugellini elena.mugellini@hes-so.ch
LANEKEEPING WITH SHARED CONTROL
 MDYNAMIX AFFILIATED INSTITUTE OF MUNICH UNIVERSITY OF APPLIED SCIENCES LANEKEEPING WITH SHARED CONTROL WHICH ISSUES HAVE TO BE RESEARCHED? 3rd International Symposium on Advanced Vehicle Technology 1 OUTLINE
MDYNAMIX AFFILIATED INSTITUTE OF MUNICH UNIVERSITY OF APPLIED SCIENCES LANEKEEPING WITH SHARED CONTROL WHICH ISSUES HAVE TO BE RESEARCHED? 3rd International Symposium on Advanced Vehicle Technology 1 OUTLINE
Ambient functionality : human interfaces for the digital life
 Enseignement et Recherche au service de la Société de l Information Ambient functionality : human interfaces for the digital life Digital technologies are disruptive Creators Experts Contents Users Author
Enseignement et Recherche au service de la Société de l Information Ambient functionality : human interfaces for the digital life Digital technologies are disruptive Creators Experts Contents Users Author
Human-in-the-Loop Simulation for Human Factors Challenges and Opportunities of Automated Vehicles
 Institute for Transport Studies FACULTY OF ENVIRONMENT Human-in-the-Loop Simulation for Human Factors Challenges and Opportunities of Automated Vehicles Natasha Merat Professor, Human Factors of Transport
Institute for Transport Studies FACULTY OF ENVIRONMENT Human-in-the-Loop Simulation for Human Factors Challenges and Opportunities of Automated Vehicles Natasha Merat Professor, Human Factors of Transport
Designing an HMI for ASAS in respect of situation awareness
 RESEARCH GRANT SCHEME DELFT Contract reference number 08-120917-C EEC contact person: Garfield Dean Designing an HMI for ASAS in respect of situation awareness Ecological ASAS Interfaces 2011 Close-Out
RESEARCH GRANT SCHEME DELFT Contract reference number 08-120917-C EEC contact person: Garfield Dean Designing an HMI for ASAS in respect of situation awareness Ecological ASAS Interfaces 2011 Close-Out
Microelectronics from Germany Driver of innovation for the digital economy
 Microelectronics from Germany Driver of innovation for the digital economy Berlin, 11 September 2018 Federal Ministry of Education and Research Division for Electronics, Autonomous electric driving Mr.
Microelectronics from Germany Driver of innovation for the digital economy Berlin, 11 September 2018 Federal Ministry of Education and Research Division for Electronics, Autonomous electric driving Mr.
Automated Vehicles in Europe Cui bono?
 Automated Vehicles in Europe Cui bono? Jens S. Dangschat, Vienna University of Technology Session 4 A: AUTOMATION IN CITIES AND REGIONS Brussels, 7th of December 2017 Contents 1. Automated Vehicles (AV)
Automated Vehicles in Europe Cui bono? Jens S. Dangschat, Vienna University of Technology Session 4 A: AUTOMATION IN CITIES AND REGIONS Brussels, 7th of December 2017 Contents 1. Automated Vehicles (AV)
Matthias Althoff Phone: Web: www6.in.tum.de/main/althoff born in Freising, Germany.
 Phone: +49-89-289-18134 E-mail: althoff@in.tum.de Web: www6.in.tum.de/main/althoff born 06.03.1981 in Freising, Germany. Curriculum Vitae EDUCATION AND RESEARCH Assistant Professor, Technische Universität
Phone: +49-89-289-18134 E-mail: althoff@in.tum.de Web: www6.in.tum.de/main/althoff born 06.03.1981 in Freising, Germany. Curriculum Vitae EDUCATION AND RESEARCH Assistant Professor, Technische Universität
The National Academies & TRB: Preparing for Automated Vehicles and Shared Mobility
 TRANSPORTATUON RESEARCH BOARD The National Academies & TRB: Preparing for Automated Vehicles and Shared Mobility Neil Pedersen Executive Director, TRB Transportation Research Board Advise Convene Research
TRANSPORTATUON RESEARCH BOARD The National Academies & TRB: Preparing for Automated Vehicles and Shared Mobility Neil Pedersen Executive Director, TRB Transportation Research Board Advise Convene Research
A PROTOTYPE CLIMBING ROBOT FOR INSPECTION OF COMPLEX FERROUS STRUCTURES
 A PROTOTYPE CLIMBING ROBOT FOR INSPECTION OF COMPLEX FERROUS STRUCTURES G. PETERS, D. PAGANO, D.K. LIU ARC Centre of Excellence for Autonomous Systems, University of Technology, Sydney Australia, POBox
A PROTOTYPE CLIMBING ROBOT FOR INSPECTION OF COMPLEX FERROUS STRUCTURES G. PETERS, D. PAGANO, D.K. LIU ARC Centre of Excellence for Autonomous Systems, University of Technology, Sydney Australia, POBox
Further than the Eye Can See Jennifer Wahnschaff Head of Instrumentation & Driver HMI, North America
 Bitte decken Sie die schraffierte Fläche mit einem Bild ab. Please cover the shaded area with a picture. (24,4 x 7,6 cm) Further than the Eye Can See Jennifer Wahnschaff Head of Instrumentation & Driver
Bitte decken Sie die schraffierte Fläche mit einem Bild ab. Please cover the shaded area with a picture. (24,4 x 7,6 cm) Further than the Eye Can See Jennifer Wahnschaff Head of Instrumentation & Driver
Humans and Automated Driving Systems
 Innovation of Automated Driving for Universal Services (SIP-adus) Humans and Automated Driving Systems November 18, 2014 Kiyozumi Unoura Chief Engineer Honda R&D Co., Ltd. Automobile R&D Center Workshop
Innovation of Automated Driving for Universal Services (SIP-adus) Humans and Automated Driving Systems November 18, 2014 Kiyozumi Unoura Chief Engineer Honda R&D Co., Ltd. Automobile R&D Center Workshop
The H-Metaphor as a Guideline for Vehicle Automation and Interaction
 NASA/TM 2003-212672 The H-Metaphor as a Guideline for Vehicle Automation and Interaction Frank O. Flemisch University Munich, Munich, Germany Catherine A. Adams, Sheila R. Conway, Ken H. Goodrich, Michael
NASA/TM 2003-212672 The H-Metaphor as a Guideline for Vehicle Automation and Interaction Frank O. Flemisch University Munich, Munich, Germany Catherine A. Adams, Sheila R. Conway, Ken H. Goodrich, Michael
Newsletter No. 2 (July 2017)
") Enhancing intelligent urban road transport network and cooperative systems for highly automated vehicles Newsletter No. 2 (July 2017) Introduction MAVEN (Managing Automated Vehicles Enhances Network) was
Enhancing intelligent urban road transport network and cooperative systems for highly automated vehicles Newsletter No. 2 (July 2017) Introduction MAVEN (Managing Automated Vehicles Enhances Network) was
Autonomous Cooperative Robots for Space Structure Assembly and Maintenance
 Proceeding of the 7 th International Symposium on Artificial Intelligence, Robotics and Automation in Space: i-sairas 2003, NARA, Japan, May 19-23, 2003 Autonomous Cooperative Robots for Space Structure
Proceeding of the 7 th International Symposium on Artificial Intelligence, Robotics and Automation in Space: i-sairas 2003, NARA, Japan, May 19-23, 2003 Autonomous Cooperative Robots for Space Structure
Matthias Althoff Phone: Web: www6.in.tum.de/main/althoff born in Freising, Germany.
 Phone: +49-89-289-18134 E-mail: althoff@in.tum.de Web: www6.in.tum.de/main/althoff born 06.03.1981 in Freising, Germany. Curriculum Vitae EDUCATION AND RESEARCH Assistant Professor, Technische Universität
Phone: +49-89-289-18134 E-mail: althoff@in.tum.de Web: www6.in.tum.de/main/althoff born 06.03.1981 in Freising, Germany. Curriculum Vitae EDUCATION AND RESEARCH Assistant Professor, Technische Universität
EVALUATION OF DIFFERENT MODALITIES FOR THE INTELLIGENT COOPERATIVE INTERSECTION SAFETY SYSTEM (IRIS) AND SPEED LIMIT SYSTEM
 AND SPEED LIMIT SYSTEM") Effects of ITS on drivers behaviour and interaction with the systems EVALUATION OF DIFFERENT MODALITIES FOR THE INTELLIGENT COOPERATIVE INTERSECTION SAFETY SYSTEM (IRIS) AND SPEED LIMIT SYSTEM Ellen S.
Effects of ITS on drivers behaviour and interaction with the systems EVALUATION OF DIFFERENT MODALITIES FOR THE INTELLIGENT COOPERATIVE INTERSECTION SAFETY SYSTEM (IRIS) AND SPEED LIMIT SYSTEM Ellen S.
ESA Strategic Framework for Human Exploration
 ESA Strategic Framework for Human Exploration B. Hufenbach EC Workshop on Space Science and Exploration Madrid, 18/2/13 Strategic Framework ESA DG s Agenda 2015 C/M12 Decisions Strategic Guidelines- Programmes
ESA Strategic Framework for Human Exploration B. Hufenbach EC Workshop on Space Science and Exploration Madrid, 18/2/13 Strategic Framework ESA DG s Agenda 2015 C/M12 Decisions Strategic Guidelines- Programmes
13/11/2013. German Aerospace Center. Virtual Reality for Planning and Controlling of Robot-based Servicing in Space. German Aerospace Center
 DLR.de Chart 1 DLR.de Chart 4 German Aerospace Center Virtual Reality for Planning and Controlling of Robot-based Servicing in Space Andreas Gerndt German Aerospace Center (DLR) Simulation and Software
DLR.de Chart 1 DLR.de Chart 4 German Aerospace Center Virtual Reality for Planning and Controlling of Robot-based Servicing in Space Andreas Gerndt German Aerospace Center (DLR) Simulation and Software
Towards A Taxonomy of Autonomous Vehicle Handover Situations
 Towards A Taxonomy of Autonomous Vehicle Handover Situations Roderick McCall 1 Fintan McGee 1 Alexander Meschtscherjakov 2 Nicolas Louveton, Thomas Engel 3 {firstname.lastname}@list.lu alexander.meschtscherjakov@sbg.ac.at
Towards A Taxonomy of Autonomous Vehicle Handover Situations Roderick McCall 1 Fintan McGee 1 Alexander Meschtscherjakov 2 Nicolas Louveton, Thomas Engel 3 {firstname.lastname}@list.lu alexander.meschtscherjakov@sbg.ac.at
TRUST-BASED CONTROL AND MOTION PLANNING FOR MULTI-ROBOT SYSTEMS WITH A HUMAN-IN-THE-LOOP
 TRUST-BASED CONTROL AND MOTION PLANNING FOR MULTI-ROBOT SYSTEMS WITH A HUMAN-IN-THE-LOOP Yue Wang, Ph.D. Warren H. Owen - Duke Energy Assistant Professor of Engineering Interdisciplinary & Intelligent
TRUST-BASED CONTROL AND MOTION PLANNING FOR MULTI-ROBOT SYSTEMS WITH A HUMAN-IN-THE-LOOP Yue Wang, Ph.D. Warren H. Owen - Duke Energy Assistant Professor of Engineering Interdisciplinary & Intelligent
Final Event Mercedes-Benz Museum, Untertürkheim, Stuttgart. Speakers. In alphabetical order of family name
 In alphabetical order of family name Speakers Luisa Andreone (Keynote speaker) CRF (Centro Ricerche Fiat) At FCA Centro Ricerche Fiat, Luisa Andreone is Programme Manager, following the Research and Innovation
In alphabetical order of family name Speakers Luisa Andreone (Keynote speaker) CRF (Centro Ricerche Fiat) At FCA Centro Ricerche Fiat, Luisa Andreone is Programme Manager, following the Research and Innovation
HUMAN-ROBOT COLLABORATION TNO, THE NETHERLANDS. 6 th SAF RA Symposium Sustainable Safety 2030 June 14, 2018 Mr. Johan van Middelaar
 HUMAN-ROBOT COLLABORATION TNO, THE NETHERLANDS 6 th SAF RA Symposium Sustainable Safety 2030 June 14, 2018 Mr. Johan van Middelaar CONTENTS TNO & Robotics Robots and workplace safety: Human-Robot Collaboration,
HUMAN-ROBOT COLLABORATION TNO, THE NETHERLANDS 6 th SAF RA Symposium Sustainable Safety 2030 June 14, 2018 Mr. Johan van Middelaar CONTENTS TNO & Robotics Robots and workplace safety: Human-Robot Collaboration,
Experimental Study on Different HMI Design Options for Lateral Safe Applications
 Experimental Study on Different HMI Design Options for Lateral Safe Applications Evangelos Bekiaris 1, Vassilis Papakostopoulos 1, Maria Gemou 1, Evangelia Gaitanidou 1 1 Centre for Research and Technology
Experimental Study on Different HMI Design Options for Lateral Safe Applications Evangelos Bekiaris 1, Vassilis Papakostopoulos 1, Maria Gemou 1, Evangelia Gaitanidou 1 1 Centre for Research and Technology
User Experience and Hedonic Quality of Assistive Technology
 User Experience and Hedonic Quality of Assistive Technology Jenny V. Bittner 1, Helena Jourdan 2, Ina Obermayer 2, Anna Seefried 2 Health Communication, Universität Bielefeld 1 Institute of Psychology
User Experience and Hedonic Quality of Assistive Technology Jenny V. Bittner 1, Helena Jourdan 2, Ina Obermayer 2, Anna Seefried 2 Health Communication, Universität Bielefeld 1 Institute of Psychology
THE NEW GENERATION OF MANUFACTURING SYSTEMS
 THE NEW GENERATION OF MANUFACTURING SYSTEMS Ing. Andrea Lešková, PhD. Technical University in Košice, Faculty of Mechanical Engineering, Mäsiarska 74, 040 01 Košice e-mail: andrea.leskova@tuke.sk Abstract
THE NEW GENERATION OF MANUFACTURING SYSTEMS Ing. Andrea Lešková, PhD. Technical University in Košice, Faculty of Mechanical Engineering, Mäsiarska 74, 040 01 Košice e-mail: andrea.leskova@tuke.sk Abstract
The Disappearing Computer
 IPSI - Integrated Publication and Information Systems Institute Norbert Streitz AMBIENTE Research Division http:// http://www.future-office.de http://www.roomware.de http://www.ambient-agoras.org http://www.disappearing-computer.net
IPSI - Integrated Publication and Information Systems Institute Norbert Streitz AMBIENTE Research Division http:// http://www.future-office.de http://www.roomware.de http://www.ambient-agoras.org http://www.disappearing-computer.net
Displaying infrastructure-based information in the car results from Austria's field operational test on cooperative I2V services
 Displaying infrastructure-based information in the car results from Austria's field operational test on cooperative I2V services Alexander Frötscher, Johannes Liebermann, AustriaTech GmbH, Raimundgasse
Displaying infrastructure-based information in the car results from Austria's field operational test on cooperative I2V services Alexander Frötscher, Johannes Liebermann, AustriaTech GmbH, Raimundgasse
ENHANCED HUMAN-AGENT INTERACTION: AUGMENTING INTERACTION MODELS WITH EMBODIED AGENTS BY SERAFIN BENTO. MASTER OF SCIENCE in INFORMATION SYSTEMS
 BY SERAFIN BENTO MASTER OF SCIENCE in INFORMATION SYSTEMS Edmonton, Alberta September, 2015 ABSTRACT The popularity of software agents demands for more comprehensive HAI design processes. The outcome of
BY SERAFIN BENTO MASTER OF SCIENCE in INFORMATION SYSTEMS Edmonton, Alberta September, 2015 ABSTRACT The popularity of software agents demands for more comprehensive HAI design processes. The outcome of
Bridging the gap of technology and work Conceptual reflections from a Technology Assessment perspective
 Bridging the gap of technology and work Conceptual reflections from a Technology Assessment perspective Bettina-Johanna Krings, António Moniz, Linda Nierling Workshop Technology & Work from a TA Perspective
Bridging the gap of technology and work Conceptual reflections from a Technology Assessment perspective Bettina-Johanna Krings, António Moniz, Linda Nierling Workshop Technology & Work from a TA Perspective
EUROPEAN COMMISSION Directorate-General for Communications Networks, Content and Technology CONCEPT NOTE
 EUROPEAN COMMISSION Directorate-General for Communications Networks, Content and Technology 1. INTRODUCTION CONCEPT NOTE The High-Level Expert Group on Artificial Intelligence On 25 April 2018, the Commission
EUROPEAN COMMISSION Directorate-General for Communications Networks, Content and Technology 1. INTRODUCTION CONCEPT NOTE The High-Level Expert Group on Artificial Intelligence On 25 April 2018, the Commission
Deliverable D1.6 Initial System Specifications Executive Summary
 Deliverable D1.6 Initial System Specifications Executive Summary Version 1.0 Dissemination Project Coordination RE Ford Research and Advanced Engineering Europe Due Date 31.10.2010 Version Date 09.02.2011
Deliverable D1.6 Initial System Specifications Executive Summary Version 1.0 Dissemination Project Coordination RE Ford Research and Advanced Engineering Europe Due Date 31.10.2010 Version Date 09.02.2011
Experimental Setup of Motion Sickness and Situation Awareness in Automated Vehicle Riding Experience
 Adjunct Proceedings of the 9th International ACM Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI 17), September 24 27, 2017, Oldenburg, Germany. Experimental
Adjunct Proceedings of the 9th International ACM Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI 17), September 24 27, 2017, Oldenburg, Germany. Experimental
Partners. Mobility Schemes Ensuring ACCESSibility of Public Transport for ALL Users. all.eu
 http://www.access-to-all.eu Issue: Nov. 2010 Partners CERTH/HIT Center of Research and Technology Hellas/Hellenic Institute of Transport Scientific Coordinator Greece ERT Europe Research Transport Management
http://www.access-to-all.eu Issue: Nov. 2010 Partners CERTH/HIT Center of Research and Technology Hellas/Hellenic Institute of Transport Scientific Coordinator Greece ERT Europe Research Transport Management
Human Factors in Control
 Human Factors in Control J. Brooks 1, K. Siu 2, and A. Tharanathan 3 1 Real-Time Optimization and Controls Lab, GE Global Research 2 Model Based Controls Lab, GE Global Research 3 Human Factors Center
Human Factors in Control J. Brooks 1, K. Siu 2, and A. Tharanathan 3 1 Real-Time Optimization and Controls Lab, GE Global Research 2 Model Based Controls Lab, GE Global Research 3 Human Factors Center
DYNAMIC POSITIONING CONFERENCE October 13-14, 2015 TRAINING AND COMPETENCY
 DYNAMIC POSITIONING CONFERENCE October 13-14, 2015 TRAINING AND COMPETENCY DP Operator Controlability Enhancement Through Adaptive Maritime Automation Hans van den Broek TNO Earth, Life and Social Sciences
DYNAMIC POSITIONING CONFERENCE October 13-14, 2015 TRAINING AND COMPETENCY DP Operator Controlability Enhancement Through Adaptive Maritime Automation Hans van den Broek TNO Earth, Life and Social Sciences
From development to type approval
 Felix Fahrenkrog Adrian Zlocki From development to type approval Technical Workshop Athens, Greece 21-22 APRIL 2016 // Motivation Challenges & Goals of Automobile Development ADAS and automated driving
Felix Fahrenkrog Adrian Zlocki From development to type approval Technical Workshop Athens, Greece 21-22 APRIL 2016 // Motivation Challenges & Goals of Automobile Development ADAS and automated driving
Model-based analysis and evaluation of 48 V automotive power supply systems regarding to electric arc faults
 Model-based analysis and evaluation of 48 V automotive power supply systems regarding to electric arc faults Michael Kiffmeier, Carina Austermann, Stephan Frei On-board Systems Lab TU Dortmund University
Model-based analysis and evaluation of 48 V automotive power supply systems regarding to electric arc faults Michael Kiffmeier, Carina Austermann, Stephan Frei On-board Systems Lab TU Dortmund University
Investigating Driver Experience and Augmented Reality Head-Up Displays in Autonomous Vehicles
 Investigating Driver Experience and Augmented Reality Head-Up Displays in Autonomous Vehicles by Murat Dikmen A thesis presented to the University of Waterloo in fulfillment of the thesis requirement for
Investigating Driver Experience and Augmented Reality Head-Up Displays in Autonomous Vehicles by Murat Dikmen A thesis presented to the University of Waterloo in fulfillment of the thesis requirement for
Glossary of terms. Short explanation
 Glossary Concept Module. Video Short explanation Abstraction 2.4 Capturing the essence of the behavior of interest (getting a model or representation) Action in the control Derivative 4.2 The control signal
Glossary Concept Module. Video Short explanation Abstraction 2.4 Capturing the essence of the behavior of interest (getting a model or representation) Action in the control Derivative 4.2 The control signal
Innovation Alliance Virtual Technologies:
 Innovation Alliance Virtual Technologies: The Link between Technology Development and Application ISMAR Workshop on Industrial Augmented Reality: Needs and Solutions, 15. September 2008, Cambridge Motivation
Innovation Alliance Virtual Technologies: The Link between Technology Development and Application ISMAR Workshop on Industrial Augmented Reality: Needs and Solutions, 15. September 2008, Cambridge Motivation
ISO Activity Update. International Organization for Standardization
 ISO Activity Update Jeff Fryman Convenor ISO TC184/SC2 WG 3 October 14 th 16 th, 2013 ~ Indianapolis, Indiana USA International Organization for Standardization ISO TC 184 Automation Systems and Integration
ISO Activity Update Jeff Fryman Convenor ISO TC184/SC2 WG 3 October 14 th 16 th, 2013 ~ Indianapolis, Indiana USA International Organization for Standardization ISO TC 184 Automation Systems and Integration
AI and the Future. Tom Everitt. 2 March 2016
 AI and the Future Tom Everitt 2 March 2016 1997 http://www.turingfinance.com/wp-content/uploads/2014/02/garry-kasparov.jpeg 2016 https://qzprod.files.wordpress.com/2016/03/march-9-ap_450969052061-e1457519723805.jpg
AI and the Future Tom Everitt 2 March 2016 1997 http://www.turingfinance.com/wp-content/uploads/2014/02/garry-kasparov.jpeg 2016 https://qzprod.files.wordpress.com/2016/03/march-9-ap_450969052061-e1457519723805.jpg
Local Density Estimation for Contention Window Adaptation in Vehicular Networks
 Local Density Estimation for Contention Window Adaptation in Vehicular Networks Razvan Stanica, Emmanuel Chaput, André-Luc Beylot University of Toulouse Institut de Recherche en Informatique de Toulouse
Local Density Estimation for Contention Window Adaptation in Vehicular Networks Razvan Stanica, Emmanuel Chaput, André-Luc Beylot University of Toulouse Institut de Recherche en Informatique de Toulouse
Overview Agents, environments, typical components
 Overview Agents, environments, typical components CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami January 23, 2017 Outline 1 Autonomous robots 2 Agents
Overview Agents, environments, typical components CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami January 23, 2017 Outline 1 Autonomous robots 2 Agents
Communication: A Specific High-level View and Modeling Approach
 Communication: A Specific High-level View and Modeling Approach Institut für Computertechnik ICT Institute of Computer Technology Hermann Kaindl Vienna University of Technology, ICT Austria kaindl@ict.tuwien.ac.at
Communication: A Specific High-level View and Modeling Approach Institut für Computertechnik ICT Institute of Computer Technology Hermann Kaindl Vienna University of Technology, ICT Austria kaindl@ict.tuwien.ac.at
The Effects of an Eco-Driving Interface on Driver Safety and Fuel Efficiency
 University of Iowa Iowa Research Online Driving Assessment Conference 2015 Driving Assessment Conference Jun 25th, 12:00 AM The Effects of an Eco-Driving Interface on Driver Safety and Fuel Efficiency
University of Iowa Iowa Research Online Driving Assessment Conference 2015 Driving Assessment Conference Jun 25th, 12:00 AM The Effects of an Eco-Driving Interface on Driver Safety and Fuel Efficiency
HORIZON Peter van der Hijden. ACA Seminar What s new in Brussels Policies and Programme 20 th January Research & Innovation.
 HORIZON 2020 Peter van der Hijden DG Research and Innovation Skills Unit ACA Seminar What s new in Brussels Policies and Programme 20 th January 2012 23/01/2012 Some basics 2 The name 3 How much? 80 billion
HORIZON 2020 Peter van der Hijden DG Research and Innovation Skills Unit ACA Seminar What s new in Brussels Policies and Programme 20 th January 2012 23/01/2012 Some basics 2 The name 3 How much? 80 billion
AN AUTONOMOUS SIMULATION BASED SYSTEM FOR ROBOTIC SERVICES IN PARTIALLY KNOWN ENVIRONMENTS
 AN AUTONOMOUS SIMULATION BASED SYSTEM FOR ROBOTIC SERVICES IN PARTIALLY KNOWN ENVIRONMENTS Eva Cipi, PhD in Computer Engineering University of Vlora, Albania Abstract This paper is focused on presenting
AN AUTONOMOUS SIMULATION BASED SYSTEM FOR ROBOTIC SERVICES IN PARTIALLY KNOWN ENVIRONMENTS Eva Cipi, PhD in Computer Engineering University of Vlora, Albania Abstract This paper is focused on presenting
Implementation of LSA in the GHz band
 Implementation of LSA in the 2.3 2.4 GHz band Bruno ESPINOSA, ECO Ministero dello Sviluppo Economico, Roma,14 February 2014 bruno.espinosa@eco.cept.org www.cept.org/eco www.cept.org/ecc Overview on the
Implementation of LSA in the 2.3 2.4 GHz band Bruno ESPINOSA, ECO Ministero dello Sviluppo Economico, Roma,14 February 2014 bruno.espinosa@eco.cept.org www.cept.org/eco www.cept.org/ecc Overview on the
DRIVE C2X Project presentation Overview. 7 June 2012 Tapani Mäkinen Senior Principal Scientist VTT
 DRIVE C2X Project presentation Overview 7 June 2012 Tapani Mäkinen Senior Principal Scientist VTT Vehicular communication in the past First serious attempt on vehicular communication in PROMETHEUS (1986
DRIVE C2X Project presentation Overview 7 June 2012 Tapani Mäkinen Senior Principal Scientist VTT Vehicular communication in the past First serious attempt on vehicular communication in PROMETHEUS (1986
Multi-Agent Planning
 25 PRICAI 2000 Workshop on Teams with Adjustable Autonomy PRICAI 2000 Workshop on Teams with Adjustable Autonomy Position Paper Designing an architecture for adjustably autonomous robot teams David Kortenkamp
25 PRICAI 2000 Workshop on Teams with Adjustable Autonomy PRICAI 2000 Workshop on Teams with Adjustable Autonomy Position Paper Designing an architecture for adjustably autonomous robot teams David Kortenkamp
Radio frequencies designated for enhanced road safety in Europe - C-Roads position on the usage of the 5.9 GHz band
 Radio frequencies designated for enhanced road safety in Europe - C-Roads position on the usage of the 5.9 GHz band The brings together road authorities and operators currently covering 16 Member States
Radio frequencies designated for enhanced road safety in Europe - C-Roads position on the usage of the 5.9 GHz band The brings together road authorities and operators currently covering 16 Member States
Applications of Millimeter-Wave Sensors in ITS
 Applications of Millimeter-Wave Sensors in ITS by Shigeaki Nishikawa* and Hiroshi Endo* There is considerable public and private support for intelligent transport systems ABSTRACT (ITS), which promise
Applications of Millimeter-Wave Sensors in ITS by Shigeaki Nishikawa* and Hiroshi Endo* There is considerable public and private support for intelligent transport systems ABSTRACT (ITS), which promise
TRB Workshop on the Future of Road Vehicle Automation
 TRB Workshop on the Future of Road Vehicle Automation Steven E. Shladover University of California PATH Program ITFVHA Meeting, Vienna October 21, 2012 1 Outline TRB background Workshop organization Automation
TRB Workshop on the Future of Road Vehicle Automation Steven E. Shladover University of California PATH Program ITFVHA Meeting, Vienna October 21, 2012 1 Outline TRB background Workshop organization Automation
Multimodal human-computer interaction in the car Novel interface and application concepts
 Multimodal human-computer interaction in the car Novel interface and application concepts Prof. Dr. Albrecht Schmidt University of Duisburg-Essen http://albrecht-schmidt.blogspot.com/ albrecht.schmidt@acm.org
Multimodal human-computer interaction in the car Novel interface and application concepts Prof. Dr. Albrecht Schmidt University of Duisburg-Essen http://albrecht-schmidt.blogspot.com/ albrecht.schmidt@acm.org
Teachers notes introducing the Engineering Diploma resource
 Teachers notes introducing the 14-19 Engineering Diploma resource The aim of this project is to support the teaching and learning of the new Engineering Diploma. Through this website, young people will
Teachers notes introducing the 14-19 Engineering Diploma resource The aim of this project is to support the teaching and learning of the new Engineering Diploma. Through this website, young people will
Augmented Reality as an Advanced Driver-Assistance System: A Cognitive Approach
 Proceedings of the 6 th Humanist Conference, The Hague, Netherlands, 13-14 June 2018 Augmented Reality as an Advanced Driver-Assistance System: A Cognitive Approach Lucas Morillo Méndez, CTAG, Spain, l.morillo.lm@gmail.com,
Proceedings of the 6 th Humanist Conference, The Hague, Netherlands, 13-14 June 2018 Augmented Reality as an Advanced Driver-Assistance System: A Cognitive Approach Lucas Morillo Méndez, CTAG, Spain, l.morillo.lm@gmail.com,
Knowledge Management for Command and Control
 Knowledge Management for Command and Control Dr. Marion G. Ceruti, Dwight R. Wilcox and Brenda J. Powers Space and Naval Warfare Systems Center, San Diego, CA 9 th International Command and Control Research
Knowledge Management for Command and Control Dr. Marion G. Ceruti, Dwight R. Wilcox and Brenda J. Powers Space and Naval Warfare Systems Center, San Diego, CA 9 th International Command and Control Research
Positioning Paper Demystifying Collaborative Industrial Robots
 Positioning Paper Demystifying Collaborative Industrial Robots published by International Federation of Robotics Frankfurt, Germany December 2018 A positioning paper by the International Federation of
Positioning Paper Demystifying Collaborative Industrial Robots published by International Federation of Robotics Frankfurt, Germany December 2018 A positioning paper by the International Federation of
Unmanned Ground Military and Construction Systems Technology Gaps Exploration
 Unmanned Ground Military and Construction Systems Technology Gaps Exploration Eugeniusz Budny a, Piotr Szynkarczyk a and Józef Wrona b a Industrial Research Institute for Automation and Measurements Al.
Unmanned Ground Military and Construction Systems Technology Gaps Exploration Eugeniusz Budny a, Piotr Szynkarczyk a and Józef Wrona b a Industrial Research Institute for Automation and Measurements Al.
MACHINE EXECUTION OF HUMAN INTENTIONS. Mark Waser Digital Wisdom Institute
 MACHINE EXECUTION OF HUMAN INTENTIONS Mark Waser Digital Wisdom Institute MWaser@DigitalWisdomInstitute.org TEAMWORK To be truly useful, robotic systems must be designed with their human users in mind;
MACHINE EXECUTION OF HUMAN INTENTIONS Mark Waser Digital Wisdom Institute MWaser@DigitalWisdomInstitute.org TEAMWORK To be truly useful, robotic systems must be designed with their human users in mind;
Software architectures for Industry 4.0 RAMI and IIRA from the perspective of projects under the AUTONOMICS for Industry 4.
 Software architectures for Industry 4.0 RAMI and IIRA from the perspective of projects under the AUTONOMICS for Industry 4.0 programme Bericht des Forschungsprojektes SoMaLI (Social Manufacturing and Logistics
Software architectures for Industry 4.0 RAMI and IIRA from the perspective of projects under the AUTONOMICS for Industry 4.0 programme Bericht des Forschungsprojektes SoMaLI (Social Manufacturing and Logistics
Virtual Assistants and Self-Driving Cars: To what extent is Artificial Intelligence needed in Next-Generation Autonomous Vehicles?
 Virtual Assistants and Self-Driving Cars: To what extent is Artificial Intelligence needed in Next-Generation Autonomous Vehicles? Dr. Giuseppe Lugano ERAdiate Team, University of Žilina (Slovakia) giuseppe.lugano@uniza.sk
Virtual Assistants and Self-Driving Cars: To what extent is Artificial Intelligence needed in Next-Generation Autonomous Vehicles? Dr. Giuseppe Lugano ERAdiate Team, University of Žilina (Slovakia) giuseppe.lugano@uniza.sk
Workshop Session #3: Human Interaction with Embedded Virtual Simulations Summary of Discussion
 : Summary of Discussion This workshop session was facilitated by Dr. Thomas Alexander (GER) and Dr. Sylvain Hourlier (FRA) and focused on interface technology and human effectiveness including sensors
: Summary of Discussion This workshop session was facilitated by Dr. Thomas Alexander (GER) and Dr. Sylvain Hourlier (FRA) and focused on interface technology and human effectiveness including sensors
Qualitätssicherung intelligenter Fahrzeugfunktionen am virtuellen Fahrzeug
 Qualitätssicherung intelligenter Fahrzeugfunktionen am virtuellen Fahrzeug Quality Management for Intelligent Car Functions using a Virtual Car Christian Basarke, Institut für Software Systems Engineering,
Qualitätssicherung intelligenter Fahrzeugfunktionen am virtuellen Fahrzeug Quality Management for Intelligent Car Functions using a Virtual Car Christian Basarke, Institut für Software Systems Engineering,
The main FP7 instruments. Aurélien Saffroy. 6 Dec
 The main FP7 instruments Aurélien Saffroy 6 Dec. 2006 www.euroquality.fr 1 Summary STRUCTURE OF THE 7 th Framework Programme STRUCTURE OF THE 7 th Framework Programme 2 The main instruments of FP7 Capacities;
The main FP7 instruments Aurélien Saffroy 6 Dec. 2006 www.euroquality.fr 1 Summary STRUCTURE OF THE 7 th Framework Programme STRUCTURE OF THE 7 th Framework Programme 2 The main instruments of FP7 Capacities;
European Robotics Research: Achievements and challenges
 European Robotics Research: Achievements and challenges Libor Král, Head of Unit, CONNECT A2 Robotics European Commission IROS 2012 Vila Moura, Algarve, Portugal 9 October 2012 European robotics research
European Robotics Research: Achievements and challenges Libor Král, Head of Unit, CONNECT A2 Robotics European Commission IROS 2012 Vila Moura, Algarve, Portugal 9 October 2012 European robotics research
Discussion of Challenges for User Interfaces in Human-Robot Teams
 1 Discussion of Challenges for User Interfaces in Human-Robot Teams Frauke Driewer, Markus Sauer, and Klaus Schilling University of Würzburg, Computer Science VII: Robotics and Telematics, Am Hubland,
1 Discussion of Challenges for User Interfaces in Human-Robot Teams Frauke Driewer, Markus Sauer, and Klaus Schilling University of Würzburg, Computer Science VII: Robotics and Telematics, Am Hubland,
HaTric HMI for Automated Driving in Traffic
 HaTric HMI for Automated Driving in Traffic Project within: FFI Traffic Safety and Automated Vehicles Authors: Annie Rydström, Marianne Karlsson, Mikael Ljung Aust, Helena Strömberg, Niklas Strand, Lars-Ola
HaTric HMI for Automated Driving in Traffic Project within: FFI Traffic Safety and Automated Vehicles Authors: Annie Rydström, Marianne Karlsson, Mikael Ljung Aust, Helena Strömberg, Niklas Strand, Lars-Ola
The Out-of-the-Loop concept in automated driving: proposed definition, measures and implications
 The Out-of-the-Loop concept in automated driving: proposed definition, measures and implications The MIT Faculty has made this article openly available. Please share how this access benefits you. Your
The Out-of-the-Loop concept in automated driving: proposed definition, measures and implications The MIT Faculty has made this article openly available. Please share how this access benefits you. Your
Smart Energy Developements and Status for Germany. 4th German-Japanese Envionmental Dialog Forum
 Smart Energy Developements and Status for Germany 4th German-Japanese Envionmental Dialog Forum www.bmwi.de www.bmwi.de Jens Brinckmann Division Development of Convergent ICT Federal Ministry of Economics
Smart Energy Developements and Status for Germany 4th German-Japanese Envionmental Dialog Forum www.bmwi.de www.bmwi.de Jens Brinckmann Division Development of Convergent ICT Federal Ministry of Economics
HMI: An Emotional Experience
 Electronics Human Machine Interface HMI: An Emotional Experience Ficosa has developed a new concept of a Human Machine Interface (HMI) controlled by a multifunctional shift element, with system information
Electronics Human Machine Interface HMI: An Emotional Experience Ficosa has developed a new concept of a Human Machine Interface (HMI) controlled by a multifunctional shift element, with system information
RECOMMENDATION ITU-R M.1310* TRANSPORT INFORMATION AND CONTROL SYSTEMS (TICS) OBJECTIVES AND REQUIREMENTS (Question ITU-R 205/8)
 OBJECTIVES AND REQUIREMENTS (Question ITU-R 205/8)") Rec. ITU-R M.1310 1 RECOMMENDATION ITU-R M.1310* TRANSPORT INFORMATION AND CONTROL SYSTEMS (TICS) OBJECTIVES AND REQUIREMENTS (Question ITU-R 205/8) Rec. ITU-R M.1310 (1997) Summary This Recommendation
Rec. ITU-R M.1310 1 RECOMMENDATION ITU-R M.1310* TRANSPORT INFORMATION AND CONTROL SYSTEMS (TICS) OBJECTIVES AND REQUIREMENTS (Question ITU-R 205/8) Rec. ITU-R M.1310 (1997) Summary This Recommendation
Perception platform and fusion modules results. Angelos Amditis - ICCS and Lali Ghosh - DEL interactive final event
 Perception platform and fusion modules results Angelos Amditis - ICCS and Lali Ghosh - DEL interactive final event 20 th -21 st November 2013 Agenda Introduction Environment Perception in Intelligent Transport
Perception platform and fusion modules results Angelos Amditis - ICCS and Lali Ghosh - DEL interactive final event 20 th -21 st November 2013 Agenda Introduction Environment Perception in Intelligent Transport
Robotics in Oil and Gas. Matt Ondler President / CEO
 Robotics in Oil and Gas Matt Ondler President / CEO 1 Agenda Quick background on HMI State of robotics Sampling of robotics projects in O&G Example of a transformative robotic application Future of robotics
Robotics in Oil and Gas Matt Ondler President / CEO 1 Agenda Quick background on HMI State of robotics Sampling of robotics projects in O&G Example of a transformative robotic application Future of robotics
Computer-Aided Safety and Risk Prevention Pushing collaborative robotics from isolated pilots to large scale deployment
 Pushing collaborative robotics from isolated pilots to large scale deployment INRS, Nancy, France J. Saenz, C. Vogel, R. Behrens, E. Schulenburg, C. Walter, N. Elkmann 30.03.2017 Fraunhofer IFF Fraunhofer
Pushing collaborative robotics from isolated pilots to large scale deployment INRS, Nancy, France J. Saenz, C. Vogel, R. Behrens, E. Schulenburg, C. Walter, N. Elkmann 30.03.2017 Fraunhofer IFF Fraunhofer
An Agent-Based Architecture for an Adaptive Human-Robot Interface
 An Agent-Based Architecture for an Adaptive Human-Robot Interface Kazuhiko Kawamura, Phongchai Nilas, Kazuhiko Muguruma, Julie A. Adams, and Chen Zhou Center for Intelligent Systems Vanderbilt University
An Agent-Based Architecture for an Adaptive Human-Robot Interface Kazuhiko Kawamura, Phongchai Nilas, Kazuhiko Muguruma, Julie A. Adams, and Chen Zhou Center for Intelligent Systems Vanderbilt University