Control Engineering. Hidden Technology. K. J. Åström Lund Institute of Technology Lund University. the Hidden Technology
|
|
|
- Samson Benson
- 6 years ago
- Views:
Transcription
1 Control Engineering the K. J. Åström Lund Institute of Technology Lund University
2 The Widely used Very successful Seldom talked about Except when disaster strikes Why? Easier to talk about devices than ideas Not enough attention to popularization
3 Engineering Education Followed the pattern of emerging industries in the 19 th and 20 th century: Civil Engineering, Mining, Mechanical, Chemical, Electrical. New fields such as Control and Systems which are not tied to particular industries appeared in the middle of the 20 th century.
4 1. Introduction 2. A Brief History 3. State of the Art 4. The Future 5. Conclusions
5 A Brief History Early use in many fields Process control Vehicle control Communication Servomechanism Theory Consequences The Second Wave

6 Industrial Process Control Windmills Mead 1787 Steam Engines 1788 Governors 1890 Water Turbines 1893 Tolle s Book 1905 The PID Controller 1930
7 Wilbur Wright 1901 We know how to construct airplanes. Men also know how to build engines. Inability to balance and steer still confronts students of the flying problem. When this one feature has been worked out, the age of flying will have arrived, for all other difficulties are of minor importance

8 Wilbur Wright 1903
9 Sperry s Autopilot 1912
10 A Quiz! Robot Piloted Plane makes Safe Crossing of the Atlantic No hands on controls from Newfoundland to Oxforshire Take-Off, Flight and Landing are fully Automatic. New York Times 19XX
11 Flight Control The Wright Brothers 1903 Sperry s Autopilot 1912 Robert E. Lee 1947 V1 and V2 (A4) 1942 Sputnik 1957 Apollo 1969 Mars Pathfinder 1997
12 The Feedback Amplifier Telephone Calls Over Long Distances The Problem: How to Increase Signal Strength? The Solution: The Feedback Amplifier Patented by Black 1928 Patent Granted 1937 Strong Development of Theory and Design Methods
13 Telecommunications The Repeater Problem Black s Invention 1928 Singing = Instability Nyquist s Theorem 1932 Bode s Paper 1940 Bode: Network Analysis and Feedback Amplifier Design
14 Mervin Kelley on Black 1957 It is no exageration to say that without Black s invention of the feedback amplifier, the present long-distance telephone and television networks, which covers our entire country and the transoceanic telephone cables would not exist.
15 The Magic of Feedback Make precise systems from imprecise components Keep variables constant Stabilize unstable system Reduce effects of disturbances and component variations New degrees of freedom for designers Main drawback - danger of instability
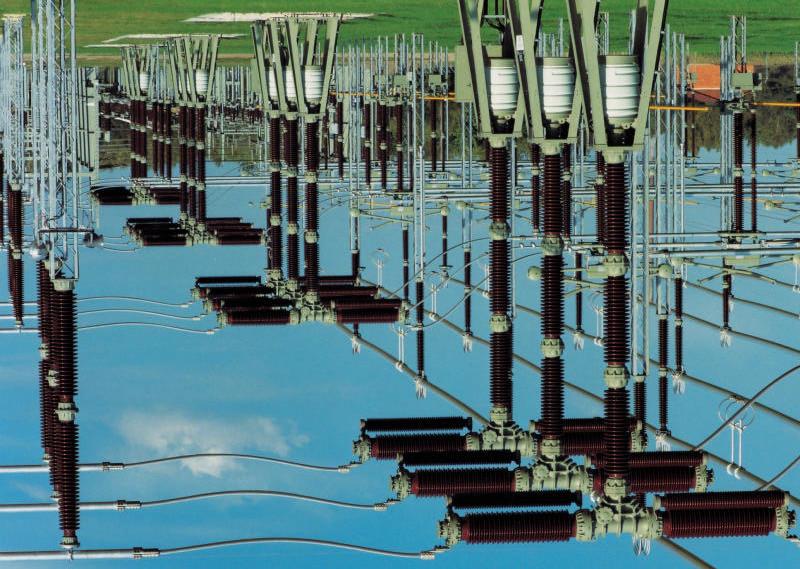
16 The Scene of 1940 Widespread use of control in many fields Power generation and distribution Process control Autopilots for ships and aircrafts Telecommunications The similarities were not recognized
17 A Discipline Emerges Industrial Process Control Telecommunications Flight Control Mathematics Principles Theory Design Methodology Applications

18 The Black Box Concept Input Output Abstraction Information hiding Transfer functions
19 Servomechanism Theory Foundations Complex variables Laplace Transforms System Concepts Feedback Feedforward Methodology Design Frequency Response Graphical Methods Analog Simulation Implementation
20 Theory of Servomechanisms Hubert M. James Professor of Physics Purdue University Nathaniel B. Nichols Director of Research Taylor Instrument Companies Ralph S. Phillips Associate Professor of Mathematics University of Southern California Office of Scientific Research and Development National Defence Research Committee
21 Cybernetics Norbert Wiener 1948 Cybernetics - Control and Communication in Human and Machine Interaction with neurophysiology McCulloch and Pitts 1943
22 Consequences Education Application Industrialization Organisation Journals Conferences
23 The Second Wave Driving Forces Space race Mathematics Computers A New Paradigm State Space Rapid Expansion Subspecialities Optimal Control Nonlinear Control Computer Control Stochastic Control Robust Control System Identification Adaptive Control CACE

24 Optimal Control Euler Lagrange Pontryagin Hamilton Jacobi Bellman SII STAGE Five J-2 Engines 2, 500, 000N Thrust ATTITUDE AND THRUST CONTROL Swivel Outer Four Engines GUIDANCE SATURN Optimum to Desired End Conditions NAVIGATION Inertial Updating of Position and Velocity

25 Kalman Filtering Gauss 1810 least squares Wold 1935 innovations Kolmogorov 1941 discrete time Wiener 1941 spectral factorization Kalman 1961 recursive equations
26 1. Introduction 2. A Brief History 3. State of the Art 4. The Future 5. Conclusions
27 Current Status A well established body of ideas, concepts, theory and design methods. Wide and growing application areas Still developing rapidly
28 Perhaps Most Important A good group of very talented and creative young researchers.
29 Applications Energy generation Energy transmission Process control Discrete manufacturing Communication Transportation Buildings Entertainment Instrumentation Mechatronics Materials Physics Biology Economics
30
31
32

33

34

35

36

37

38 CD Player Tracking Searching Focusing DC-motor photo diodes radial arm Optical Pick-up Unit
39 A Dilemma Automatic control is a collection of ideas, concepts and theories with very wide applications areas. How to cope with: Coupling to hardware Coupling to industries Specific domain knowledge Academic positioning
40 A Soul but No Body Technology transfer Student attraction Searching for a home court Many base industries Generality Academic positioning
41 1. Introduction 2. A Brief History 3. State of the Art 4. The Future 5. Conclusions
42 Natural and Engineering Sciences Understand Nature vs Man-made Systems Equally Challenging Extensive use of Mathematics Design and Operation of Systems Physical Laws vs System Principles Isolation vs Interaction Reductionism vs Systems Theoretical Physics vs System Theory
43 The Future of Control Increased use in engineering Control over/of communication networks Autonomous systems Biology and Medicine Many previous attempts,, Will it work this time? Physics Devices and Ideas,, Quantum systems
44 Process and Control Design Wright Brothers rejected the dogma that aircraft should be inherently stable Minorsky 1922: It is an old adage that a stable ship is difficult to steer Integrated process and control design Control gives designers extra freedom The cardinal sin of control

45 Co-Design of Process and Control

46 The Mercedes A-classA Control comes to the rescue! ESP Unstable behavior improved by Electronic Stabilization Program (ESP)
47 Computing and Control Software issues increasingly important Object oriented modeling Feedback scheduling Control of servers and nets Vision Feedback and haptics High level control principles Learning systems
48 Computers and Control Process control Regular Embedded
49 Step Length Control in ODE Solvers Step length Error Dead-beat control was standard PI control gives much better behavior Control view gives better code
50 Devices and ideas Physics Particle Accelerators The 1984 Nobel Prize Van Der Meer Adaptive Optics Atomic Force Microscope Quantum and Molecular Systems Turbulence

51 Adaptive Optics
52 Biology Feedback is a central feature of life. The process of feedback governs how we grow, respond to stress and challenge, and regulate factors such as body temperature, blood pressure, and cholesterol level. The mechanisms operate at every level, from the interaction of proteins in cells to the interaction of organisms in complex ecologies. Mahlon B Hoagland and B Dodson The Way Life Works Times Books 1995
53 Charles Darwin It is not the strongest of the species that survive, nor the most intelligent, it is the one that is most adaptable to change.
54 Educational Challenges Theory and applications expanding How to compactify the knowledge? The engineering aspect The field had changed a lot, the courses have not Relations to computing
55 Interesting Areas C 3 - Control Computing Communication Control over/of communication networks Biology and Medicine Many previous attempts,, Will it work this time? Complex systems Autonomous and learning systems Supply chains, quantumq systems
56 Examples of New Problems Sensor-rich control Actuation-rich control High level control principles
57 Recipe for Success Good ideas and demanding problems Solid theory Good engineering Examples Servomechanisms, Optimal control Robust control, Nonlinear control
58 1. Introduction 2. A Brief History 3. State of the Art 4. The Future 5. Conclusions
59 An exciting field Conclusions Use of feedback often revolutionary Rapid growth of applications Streamline available knowledge Education is a key issue Many new challenging problems
60 Take Care of Both Body and Soul Intellectual challenges (the soul) Basics that generalizes easily Give the general picture Particular attention to introductory courses The engineering aspect (the body) Educate students broadly so that they can take full systems responsibility Learn theory and a particular domain
61
62 The End
Introduction to Control Systems
 Introduction to Control Systems MEM 355 Performance Enhancement of Dynamical Systems Harry G. Kwatny Department of Mechanical Engineering & Mechanics Drexel University Outline Course practical information
Introduction to Control Systems MEM 355 Performance Enhancement of Dynamical Systems Harry G. Kwatny Department of Mechanical Engineering & Mechanics Drexel University Outline Course practical information
Executive Summary. Chapter 1. Overview of Control
 Chapter 1 Executive Summary Rapid advances in computing, communications, and sensing technology offer unprecedented opportunities for the field of control to expand its contributions to the economic and
Chapter 1 Executive Summary Rapid advances in computing, communications, and sensing technology offer unprecedented opportunities for the field of control to expand its contributions to the economic and
Glossary of terms. Short explanation
 Glossary Concept Module. Video Short explanation Abstraction 2.4 Capturing the essence of the behavior of interest (getting a model or representation) Action in the control Derivative 4.2 The control signal
Glossary Concept Module. Video Short explanation Abstraction 2.4 Capturing the essence of the behavior of interest (getting a model or representation) Action in the control Derivative 4.2 The control signal
Chapter 1: Introduction to Control Systems Objectives
 Chapter 1: Introduction to Control Systems Objectives In this chapter we describe a general process for designing a control system. A control system consisting of interconnected components is designed
Chapter 1: Introduction to Control Systems Objectives In this chapter we describe a general process for designing a control system. A control system consisting of interconnected components is designed
Control Design for Servomechanisms July 2005, Glasgow Detailed Training Course Agenda
 Control Design for Servomechanisms 12 14 July 2005, Glasgow Detailed Training Course Agenda DAY 1 INTRODUCTION TO SYSTEMS AND MODELLING 9.00 Introduction The Need For Control - What Is Control? - Feedback
Control Design for Servomechanisms 12 14 July 2005, Glasgow Detailed Training Course Agenda DAY 1 INTRODUCTION TO SYSTEMS AND MODELLING 9.00 Introduction The Need For Control - What Is Control? - Feedback
Revisiting the Hidden Technology
 Revisiting the Hidden Technology K. J. Åström Department of Automatic Control LTH Lund University Congratulations Very Successful Career The control department at University of Valencia A world class establishment
Revisiting the Hidden Technology K. J. Åström Department of Automatic Control LTH Lund University Congratulations Very Successful Career The control department at University of Valencia A world class establishment
Biomedical Control Systems. Lecture#01
 1 Biomedical Control Systems Lecture#01 2 Text Books Modern Control Engineering, 5 th Edition; Ogata. Feedback & Control Systems, 2 nd edition; Schaum s outline, Joseph J, Allen R. Control Systems Engineering,
1 Biomedical Control Systems Lecture#01 2 Text Books Modern Control Engineering, 5 th Edition; Ogata. Feedback & Control Systems, 2 nd edition; Schaum s outline, Joseph J, Allen R. Control Systems Engineering,
Introduction. 1.1 Introduction
 1 1.1 Control systems are ubiquitous. They appear in our homes, in cars, in industry and in systems for communication and transport, just to give a few examples. Control is increasingly becoming mission
1 1.1 Control systems are ubiquitous. They appear in our homes, in cars, in industry and in systems for communication and transport, just to give a few examples. Control is increasingly becoming mission
The PID controller. Summary. Introduction to Control Systems
 The PID controller ISTTOK real-time AC 7-10-2010 Summary Introduction to Control Systems PID Controller PID Tuning Discrete-time Implementation The PID controller 2 Introduction to Control Systems Some
The PID controller ISTTOK real-time AC 7-10-2010 Summary Introduction to Control Systems PID Controller PID Tuning Discrete-time Implementation The PID controller 2 Introduction to Control Systems Some
Rapid and precise control of a micro-manipulation stage combining H with ILC algorithm
 Rapid and precise control of a micro-manipulation stage combining H with ILC algorithm *Jie Ling 1 and Xiaohui Xiao 1, School of Power and Mechanical Engineering, WHU, Wuhan, China xhxiao@whu.edu.cn ABSTRACT
Rapid and precise control of a micro-manipulation stage combining H with ILC algorithm *Jie Ling 1 and Xiaohui Xiao 1, School of Power and Mechanical Engineering, WHU, Wuhan, China xhxiao@whu.edu.cn ABSTRACT
Welcome to SENG 480B / CSC 485A / CSC 586A Self-Adaptive and Self-Managing Systems
 Welcome to SENG 480B / CSC 485A / CSC 586A Self-Adaptive and Self-Managing Systems Dr. Hausi A. Müller Department of Computer Science University of Victoria http://courses.seng.uvic.ca/courses/2015/summer/seng/480a
Welcome to SENG 480B / CSC 485A / CSC 586A Self-Adaptive and Self-Managing Systems Dr. Hausi A. Müller Department of Computer Science University of Victoria http://courses.seng.uvic.ca/courses/2015/summer/seng/480a
CDS 101/110a: Lecture 8-1 Frequency Domain Design
 CDS 11/11a: Lecture 8-1 Frequency Domain Design Richard M. Murray 17 November 28 Goals: Describe canonical control design problem and standard performance measures Show how to use loop shaping to achieve
CDS 11/11a: Lecture 8-1 Frequency Domain Design Richard M. Murray 17 November 28 Goals: Describe canonical control design problem and standard performance measures Show how to use loop shaping to achieve
Cross Disciplinary Research and the Role of Industry.
 Cross Disciplinary Research and the Role of Industry Richard Murray John Baras Mike Grimble Bob Barmish Lennart Lung Outline I. CDS Panel Overview II. Findings and Recommendations III. Workshop Agenda
Cross Disciplinary Research and the Role of Industry Richard Murray John Baras Mike Grimble Bob Barmish Lennart Lung Outline I. CDS Panel Overview II. Findings and Recommendations III. Workshop Agenda
Modeling And Pid Cascade Control For Uav Type Quadrotor
 IOSR Journal of Dental and Medical Sciences (IOSR-JDMS) e-issn: 2279-0853, p-issn: 2279-0861.Volume 15, Issue 8 Ver. IX (August. 2016), PP 52-58 www.iosrjournals.org Modeling And Pid Cascade Control For
IOSR Journal of Dental and Medical Sciences (IOSR-JDMS) e-issn: 2279-0853, p-issn: 2279-0861.Volume 15, Issue 8 Ver. IX (August. 2016), PP 52-58 www.iosrjournals.org Modeling And Pid Cascade Control For
EE 482 : CONTROL SYSTEMS Lab Manual
 University of Bahrain College of Engineering Dept. of Electrical and Electronics Engineering EE 482 : CONTROL SYSTEMS Lab Manual Dr. Ebrahim Al-Gallaf Assistance Professor of Intelligent Control and Robotics
University of Bahrain College of Engineering Dept. of Electrical and Electronics Engineering EE 482 : CONTROL SYSTEMS Lab Manual Dr. Ebrahim Al-Gallaf Assistance Professor of Intelligent Control and Robotics
Lecture 2: Embedded Systems: An Introduction
 Design & Co-design of Embedded Systems Lecture 2: Embedded Systems: An Introduction Adapted from ECE456 course notes, University of California (Riverside), and EE412 course notes, Princeton University
Design & Co-design of Embedded Systems Lecture 2: Embedded Systems: An Introduction Adapted from ECE456 course notes, University of California (Riverside), and EE412 course notes, Princeton University
Loop Design. Chapter Introduction
 Chapter 8 Loop Design 8.1 Introduction This is the first Chapter that deals with design and we will therefore start by some general aspects on design of engineering systems. Design is complicated because
Chapter 8 Loop Design 8.1 Introduction This is the first Chapter that deals with design and we will therefore start by some general aspects on design of engineering systems. Design is complicated because
Integrated Navigation System
 Integrated Navigation System Adhika Lie adhika@aem.umn.edu AEM 5333: Design, Build, Model, Simulate, Test and Fly Small Uninhabited Aerial Vehicles Feb 14, 2013 1 Navigation System Where am I? Position,
Integrated Navigation System Adhika Lie adhika@aem.umn.edu AEM 5333: Design, Build, Model, Simulate, Test and Fly Small Uninhabited Aerial Vehicles Feb 14, 2013 1 Navigation System Where am I? Position,
ROBOTICS ENG YOUSEF A. SHATNAWI INTRODUCTION
 ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
AVR221: Discrete PID Controller on tinyavr and megaavr devices. Introduction. AVR 8-bit Microcontrollers APPLICATION NOTE
 AVR 8-bit Microcontrollers AVR221: Discrete PID Controller on tinyavr and megaavr devices APPLICATION NOTE Introduction This application note describes a simple implementation of a discrete Proportional-
AVR 8-bit Microcontrollers AVR221: Discrete PID Controller on tinyavr and megaavr devices APPLICATION NOTE Introduction This application note describes a simple implementation of a discrete Proportional-
Lecture 1 : Introduction to Control Engineering
 UCSI University Kuala Lumpur, Malaysia Faculty of Engineering Department of Mechatronics Lecture 1 Introduction to Control Engineering Mohd Sulhi bin Azman Lecturer Department of Mechatronics UCSI University
UCSI University Kuala Lumpur, Malaysia Faculty of Engineering Department of Mechatronics Lecture 1 Introduction to Control Engineering Mohd Sulhi bin Azman Lecturer Department of Mechatronics UCSI University
Introduction. Chapter What is Feedback?
 Chapter 1 Introduction Feedback is a central feature of life. The process of feedback governs how we grow, respond to stress and challenge, and regulate factors such as body temperature, blood pressure,
Chapter 1 Introduction Feedback is a central feature of life. The process of feedback governs how we grow, respond to stress and challenge, and regulate factors such as body temperature, blood pressure,
1. Introduction 1.1 Motivation and Objectives
 1. Introduction 1.1 Motivation and Objectives Today, the analysis and design of complex power electronic systems such as motor drives is usually done using a modern simulation software which can provide
1. Introduction 1.1 Motivation and Objectives Today, the analysis and design of complex power electronic systems such as motor drives is usually done using a modern simulation software which can provide
ME 375 System Modeling and Analysis
 ME 375 System Modeling and Analysis G(s) H(s) Section 9 Block Diagrams and Feedback Control Spring 2009 School of Mechanical Engineering Douglas E. Adams Associate Professor 9.1 Key Points to Remember
ME 375 System Modeling and Analysis G(s) H(s) Section 9 Block Diagrams and Feedback Control Spring 2009 School of Mechanical Engineering Douglas E. Adams Associate Professor 9.1 Key Points to Remember
Automatic Control Motion control Advanced control techniques
 Automatic Control Motion control Advanced control techniques (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Motivations (I) 2 Besides the classical
Automatic Control Motion control Advanced control techniques (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Motivations (I) 2 Besides the classical
The ERC: a contribution to society and the knowledge-based economy
 The ERC: a contribution to society and the knowledge-based economy ERC Launch Conference Berlin, February 27-28, 2007 Keynote speech Andrea Bonaccorsi University of Pisa, Italy Forecasting the position
The ERC: a contribution to society and the knowledge-based economy ERC Launch Conference Berlin, February 27-28, 2007 Keynote speech Andrea Bonaccorsi University of Pisa, Italy Forecasting the position
Control Systems Overview REV II
 Control Systems Overview REV II D R. T A R E K A. T U T U N J I M E C H A C T R O N I C S Y S T E M D E S I G N P H I L A D E L P H I A U N I V E R S I T Y 2 0 1 4 Control Systems The control system is
Control Systems Overview REV II D R. T A R E K A. T U T U N J I M E C H A C T R O N I C S Y S T E M D E S I G N P H I L A D E L P H I A U N I V E R S I T Y 2 0 1 4 Control Systems The control system is
Figure 1.1: Quanser Driving Simulator
 1 INTRODUCTION The Quanser HIL Driving Simulator (QDS) is a modular and expandable LabVIEW model of a car driving on a closed track. The model is intended as a platform for the development, implementation
1 INTRODUCTION The Quanser HIL Driving Simulator (QDS) is a modular and expandable LabVIEW model of a car driving on a closed track. The model is intended as a platform for the development, implementation
Modern Control System Theory and Design. Dr. Huang, Min Chemical Engineering Program Tongji University
 Modern Control System Theory and Design Dr. Huang, Min Chemical Engineering Program Tongji University Syllabus Instructor: Dr. Huang, Min Time and Place to meet Office Hours: Text Book and References Modern
Modern Control System Theory and Design Dr. Huang, Min Chemical Engineering Program Tongji University Syllabus Instructor: Dr. Huang, Min Time and Place to meet Office Hours: Text Book and References Modern
AC : A STUDENT-ORIENTED CONTROL LABORATORY US- ING PROGRAM CC
 AC 2011-490: A STUDENT-ORIENTED CONTROL LABORATORY US- ING PROGRAM CC Ziqian Liu, SUNY Maritime College Ziqian Liu received the Ph.D. degree from the Southern Illinois University Carbondale in 2005. He
AC 2011-490: A STUDENT-ORIENTED CONTROL LABORATORY US- ING PROGRAM CC Ziqian Liu, SUNY Maritime College Ziqian Liu received the Ph.D. degree from the Southern Illinois University Carbondale in 2005. He
Chapter 2 Mechatronics Disrupted
 Chapter 2 Mechatronics Disrupted Maarten Steinbuch 2.1 How It Started The field of mechatronics started in the 1970s when mechanical systems needed more accurate controlled motions. This forced both industry
Chapter 2 Mechatronics Disrupted Maarten Steinbuch 2.1 How It Started The field of mechatronics started in the 1970s when mechanical systems needed more accurate controlled motions. This forced both industry
Overview of the Field
 Chapter 2 Overview of the Field Control is a field with broad relevance to a number of engineering applications. Its impact on modern society is both profound and often poorly understood. In this chapter,
Chapter 2 Overview of the Field Control is a field with broad relevance to a number of engineering applications. Its impact on modern society is both profound and often poorly understood. In this chapter,
DEGREE: Biomedical Engineering YEAR: TERM: 1
 COURSE: Control Engineering DEGREE: Biomedical Engineering YEAR: TERM: 1 La asignatura tiene 14 sesiones que se distribuyen a lo largo de 7 semanas. Los dos laboratorios puede situarse en cualquiera de
COURSE: Control Engineering DEGREE: Biomedical Engineering YEAR: TERM: 1 La asignatura tiene 14 sesiones que se distribuyen a lo largo de 7 semanas. Los dos laboratorios puede situarse en cualquiera de
COVENANT UNIVERSITY NIGERIA TUTORIAL KIT OMEGA SEMESTER PROGRAMME: MECHANICAL ENGINEERING
 COVENANT UNIVERSITY NIGERIA TUTORIAL KIT OMEGA SEMESTER PROGRAMME: MECHANICAL ENGINEERING COURSE: MCE 527 DISCLAIMER The contents of this document are intended for practice and leaning purposes at the
COVENANT UNIVERSITY NIGERIA TUTORIAL KIT OMEGA SEMESTER PROGRAMME: MECHANICAL ENGINEERING COURSE: MCE 527 DISCLAIMER The contents of this document are intended for practice and leaning purposes at the
MODEL BASED CONTROL FOR INTERACTING AND NON-INTERACTING LEVEL PROCESS USING LABVIEW
 MODEL BASED CONTROL FOR INTERACTING AND NON-INTERACTING LEVEL PROCESS USING LABVIEW M.Lavanya 1, P.Aravind 2, M.Valluvan 3, Dr.B.Elizabeth Caroline 4 PG Scholar[AE], Dept. of ECE, J.J. College of Engineering&
MODEL BASED CONTROL FOR INTERACTING AND NON-INTERACTING LEVEL PROCESS USING LABVIEW M.Lavanya 1, P.Aravind 2, M.Valluvan 3, Dr.B.Elizabeth Caroline 4 PG Scholar[AE], Dept. of ECE, J.J. College of Engineering&
Ben M. Chen. Professor of Electrical & Computer Engineering National University of Singapore
 Linear Systems and Control Ben M. Chen Professor of Electrical & Computer Engineering National University of Singapore Office: E4 06 08, Phone: 6516 2289 Email: bmchen@nus.edu.sg http://www.bmchen.net
Linear Systems and Control Ben M. Chen Professor of Electrical & Computer Engineering National University of Singapore Office: E4 06 08, Phone: 6516 2289 Email: bmchen@nus.edu.sg http://www.bmchen.net
Perception. Read: AIMA Chapter 24 & Chapter HW#8 due today. Vision
 11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
-binary sensors and actuators (such as an on/off controller) are generally more reliable and less expensive
 are generally more reliable and less expensive") Process controls are necessary for designing safe and productive plants. A variety of process controls are used to manipulate processes, however the most simple and often most effective is the PID controller.
Process controls are necessary for designing safe and productive plants. A variety of process controls are used to manipulate processes, however the most simple and often most effective is the PID controller.
AIRCRAFT CONTROL AND SIMULATION
 AIRCRAFT CONTROL AND SIMULATION AIRCRAFT CONTROL AND SIMULATION Third Edition Dynamics, Controls Design, and Autonomous Systems BRIAN L. STEVENS FRANK L. LEWIS ERIC N. JOHNSON Cover image: Space Shuttle
AIRCRAFT CONTROL AND SIMULATION AIRCRAFT CONTROL AND SIMULATION Third Edition Dynamics, Controls Design, and Autonomous Systems BRIAN L. STEVENS FRANK L. LEWIS ERIC N. JOHNSON Cover image: Space Shuttle
SMJE 3153 Control System. Department of ESE, MJIIT, UTM 2014/2015
 SMJE 3153 Control System Department of ESE, MJIIT, UTM 2014/2015 1 Course Outline Course Instructors Prof Nozomu Hamada (hamada@utm.my)and Dr. Mohd Azizi Abdul Rahman Course Web site UTM e-learning site
SMJE 3153 Control System Department of ESE, MJIIT, UTM 2014/2015 1 Course Outline Course Instructors Prof Nozomu Hamada (hamada@utm.my)and Dr. Mohd Azizi Abdul Rahman Course Web site UTM e-learning site
Engineering, & Mathematics
 8O260 Applied Mathematics for Technical Professionals (R) 1 credit Gr: 10-12 Prerequisite: Recommended prerequisites: Algebra I and Geometry Description: (SGHS only) Applied Mathematics for Technical Professionals
8O260 Applied Mathematics for Technical Professionals (R) 1 credit Gr: 10-12 Prerequisite: Recommended prerequisites: Algebra I and Geometry Description: (SGHS only) Applied Mathematics for Technical Professionals
Position Control of DC Motor by Compensating Strategies
 Position Control of DC Motor by Compensating Strategies S Prem Kumar 1 J V Pavan Chand 1 B Pangedaiah 1 1. Assistant professor of Laki Reddy Balireddy College Of Engineering, Mylavaram Abstract - As the
Position Control of DC Motor by Compensating Strategies S Prem Kumar 1 J V Pavan Chand 1 B Pangedaiah 1 1. Assistant professor of Laki Reddy Balireddy College Of Engineering, Mylavaram Abstract - As the
Course Objectives. This course gives a basic neural network architectures and learning rules.
 Introduction Course Objectives This course gives a basic neural network architectures and learning rules. Emphasis is placed on the mathematical analysis of these networks, on methods of training them
Introduction Course Objectives This course gives a basic neural network architectures and learning rules. Emphasis is placed on the mathematical analysis of these networks, on methods of training them
EECE 460 : Control System Design
 EECE 460 : Control System Design January 2012 Guy A. Dumont UBC EECE Introduction Guy A. Dumont (UBC EECE) EECE 460 : Control System Design Introduction 1 / 24 Contents Contents Practical information Your
EECE 460 : Control System Design January 2012 Guy A. Dumont UBC EECE Introduction Guy A. Dumont (UBC EECE) EECE 460 : Control System Design Introduction 1 / 24 Contents Contents Practical information Your
Automation and Mechatronics Engineering Program. Your Path Towards Success
 Automation and Mechatronics Engineering Program Your Path Towards Success What is Mechatronics? Mechatronics combines the principles of mechanical, computer, electronic, and control engineering into a
Automation and Mechatronics Engineering Program Your Path Towards Success What is Mechatronics? Mechatronics combines the principles of mechanical, computer, electronic, and control engineering into a
Contents lecture 9. Automatic Control III. Lecture 9 Optimal control
 Contents lecture 9 Automatic Control III Lecture 9 Optimal control Thomas Schön Division of Systems and Control Department of Information Technology Uppsala University. 1. Summary of lecture 8 2. Goddards
Contents lecture 9 Automatic Control III Lecture 9 Optimal control Thomas Schön Division of Systems and Control Department of Information Technology Uppsala University. 1. Summary of lecture 8 2. Goddards
Quanser Products and solutions
 Quanser Products and solutions with NI LabVIEW From Classic Control to Complex Mechatronic Systems Design www.quanser.com Your first choice for control systems experiments For twenty five years, institutions
Quanser Products and solutions with NI LabVIEW From Classic Control to Complex Mechatronic Systems Design www.quanser.com Your first choice for control systems experiments For twenty five years, institutions
QUADROTOR ROLL AND PITCH STABILIZATION USING SYSTEM IDENTIFICATION BASED REDESIGN OF EMPIRICAL CONTROLLERS
 QUADROTOR ROLL AND PITCH STABILIZATION USING SYSTEM IDENTIFICATION BASED REDESIGN OF EMPIRICAL CONTROLLERS ANIL UFUK BATMAZ 1, a, OVUNC ELBIR 2,b and COSKU KASNAKOGLU 3,c 1,2,3 Department of Electrical
QUADROTOR ROLL AND PITCH STABILIZATION USING SYSTEM IDENTIFICATION BASED REDESIGN OF EMPIRICAL CONTROLLERS ANIL UFUK BATMAZ 1, a, OVUNC ELBIR 2,b and COSKU KASNAKOGLU 3,c 1,2,3 Department of Electrical
Nonlinear Control Lecture
 Nonlinear Control Lecture Just what constitutes nonlinear control? Control systems whose behavior cannot be analyzed by linear control theory. All systems contain some nonlinearities, most are small and
Nonlinear Control Lecture Just what constitutes nonlinear control? Control systems whose behavior cannot be analyzed by linear control theory. All systems contain some nonlinearities, most are small and
SELF-BALANCING MOBILE ROBOT TILTER
 Tomislav Tomašić Andrea Demetlika Prof. dr. sc. Mladen Crneković ISSN xxx-xxxx SELF-BALANCING MOBILE ROBOT TILTER Summary UDC 007.52, 62-523.8 In this project a remote controlled self-balancing mobile
Tomislav Tomašić Andrea Demetlika Prof. dr. sc. Mladen Crneković ISSN xxx-xxxx SELF-BALANCING MOBILE ROBOT TILTER Summary UDC 007.52, 62-523.8 In this project a remote controlled self-balancing mobile
TEAM AERO-I TEAM AERO-I JOURNAL PAPER DELHI TECHNOLOGICAL UNIVERSITY Journal paper for IARC 2014
 TEAM AERO-I TEAM AERO-I JOURNAL PAPER DELHI TECHNOLOGICAL UNIVERSITY DELHI TECHNOLOGICAL UNIVERSITY Journal paper for IARC 2014 2014 IARC ABSTRACT The paper gives prominence to the technical details of
TEAM AERO-I TEAM AERO-I JOURNAL PAPER DELHI TECHNOLOGICAL UNIVERSITY DELHI TECHNOLOGICAL UNIVERSITY Journal paper for IARC 2014 2014 IARC ABSTRACT The paper gives prominence to the technical details of
COMPUTER SCIENCE AND ENGINEERING
 COMPUTER SCIENCE AND ENGINEERING Internet of Thing Cloud Computing Big Data Analytics Network Security Distributed System Image Processing Data Science Business Intelligence Wireless Sensor Network Artificial
COMPUTER SCIENCE AND ENGINEERING Internet of Thing Cloud Computing Big Data Analytics Network Security Distributed System Image Processing Data Science Business Intelligence Wireless Sensor Network Artificial
Teleoperation and System Health Monitoring Mo-Yuen Chow, Ph.D.
 Teleoperation and System Health Monitoring Mo-Yuen Chow, Ph.D. chow@ncsu.edu Advanced Diagnosis and Control (ADAC) Lab Department of Electrical and Computer Engineering North Carolina State University
Teleoperation and System Health Monitoring Mo-Yuen Chow, Ph.D. chow@ncsu.edu Advanced Diagnosis and Control (ADAC) Lab Department of Electrical and Computer Engineering North Carolina State University
Flight Dynamics AE426
 KING FAHD UNIVERSITY Department of Aerospace Engineering AE426: Flight Dynamics Instructor Dr. Ayman Hamdy Kassem What is flight dynamics? Is the study of aircraft motion and its characteristics. Is it
KING FAHD UNIVERSITY Department of Aerospace Engineering AE426: Flight Dynamics Instructor Dr. Ayman Hamdy Kassem What is flight dynamics? Is the study of aircraft motion and its characteristics. Is it
Tuning of Controller for Electro-Hydraulic System Using Particle Swarm Optimization (PSO)
") Tuning of Controller for Electro-Hydraulic System Using Particle Swarm Optimization (PSO) Sachin Kumar Mishra 1, Prof. Kuldeep Kumar Swarnkar 2 Electrical Engineering Department 1, 2, MITS, Gwaliore 1,
Tuning of Controller for Electro-Hydraulic System Using Particle Swarm Optimization (PSO) Sachin Kumar Mishra 1, Prof. Kuldeep Kumar Swarnkar 2 Electrical Engineering Department 1, 2, MITS, Gwaliore 1,
Design of Self-tuning PID Controller Parameters Using Fuzzy Logic Controller for Quad-rotor Helicopter
 Design of Self-tuning PID Controller Parameters Using Fuzzy Logic Controller for Quad-rotor Helicopter Item type Authors Citation Journal Article Bousbaine, Amar; Bamgbose, Abraham; Poyi, Gwangtim Timothy;
Design of Self-tuning PID Controller Parameters Using Fuzzy Logic Controller for Quad-rotor Helicopter Item type Authors Citation Journal Article Bousbaine, Amar; Bamgbose, Abraham; Poyi, Gwangtim Timothy;
WB2306 The Human Controller
 Simulation WB2306 The Human Controller Class 1. General Introduction Adapt the device to the human, not the human to the device! Teacher: David ABBINK Assistant professor at Delft Haptics Lab (www.delfthapticslab.nl)
Simulation WB2306 The Human Controller Class 1. General Introduction Adapt the device to the human, not the human to the device! Teacher: David ABBINK Assistant professor at Delft Haptics Lab (www.delfthapticslab.nl)
CHAPTER 1 Introduction of Control System
 CHAPTER 1 Introduction of Control System DR. SHAFISHUHAZA SAHLAN DR. SHAHDAN SUDIN DR. HERMAN WAHID DR. FATIMAH SHAM ISMAIL Department of Control and Mechatronics Engineering Faculty of Electrical Engineering
CHAPTER 1 Introduction of Control System DR. SHAFISHUHAZA SAHLAN DR. SHAHDAN SUDIN DR. HERMAN WAHID DR. FATIMAH SHAM ISMAIL Department of Control and Mechatronics Engineering Faculty of Electrical Engineering
UNIT III Data Acquisition & Microcontroller System. Mr. Manoj Rajale
 UNIT III Data Acquisition & Microcontroller System Mr. Manoj Rajale Syllabus Interfacing of Sensors / Actuators to DAQ system, Bit width, Sampling theorem, Sampling Frequency, Aliasing, Sample and hold
UNIT III Data Acquisition & Microcontroller System Mr. Manoj Rajale Syllabus Interfacing of Sensors / Actuators to DAQ system, Bit width, Sampling theorem, Sampling Frequency, Aliasing, Sample and hold
Range Sensing strategies
 Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart and Nourbakhsh 4.1.6 Range Sensors (time of flight) (1) Large range distance measurement -> called
Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart and Nourbakhsh 4.1.6 Range Sensors (time of flight) (1) Large range distance measurement -> called
CHBE320 LECTURE XI CONTROLLER DESIGN AND PID CONTOLLER TUNING. Professor Dae Ryook Yang
 CHBE320 LECTURE XI CONTROLLER DESIGN AND PID CONTOLLER TUNING Professor Dae Ryook Yang Spring 2018 Dept. of Chemical and Biological Engineering 11-1 Road Map of the Lecture XI Controller Design and PID
CHBE320 LECTURE XI CONTROLLER DESIGN AND PID CONTOLLER TUNING Professor Dae Ryook Yang Spring 2018 Dept. of Chemical and Biological Engineering 11-1 Road Map of the Lecture XI Controller Design and PID
STANDARD TUNING PROCEDURE AND THE BECK DRIVE: A COMPARATIVE OVERVIEW AND GUIDE
 STANDARD TUNING PROCEDURE AND THE BECK DRIVE: A COMPARATIVE OVERVIEW AND GUIDE Scott E. Kempf Harold Beck and Sons, Inc. 2300 Terry Drive Newtown, PA 18946 STANDARD TUNING PROCEDURE AND THE BECK DRIVE:
STANDARD TUNING PROCEDURE AND THE BECK DRIVE: A COMPARATIVE OVERVIEW AND GUIDE Scott E. Kempf Harold Beck and Sons, Inc. 2300 Terry Drive Newtown, PA 18946 STANDARD TUNING PROCEDURE AND THE BECK DRIVE:
Digital Control of MS-150 Modular Position Servo System
 IEEE NECEC Nov. 8, 2007 St. John's NL 1 Digital Control of MS-150 Modular Position Servo System Farid Arvani, Syeda N. Ferdaus, M. Tariq Iqbal Faculty of Engineering, Memorial University of Newfoundland
IEEE NECEC Nov. 8, 2007 St. John's NL 1 Digital Control of MS-150 Modular Position Servo System Farid Arvani, Syeda N. Ferdaus, M. Tariq Iqbal Faculty of Engineering, Memorial University of Newfoundland
PID control. since Similarly, modern industrial
 Control basics Introduction to For deeper understanding of their usefulness, we deconstruct P, I, and D control functions. PID control Paul Avery Senior Product Training Engineer Yaskawa Electric America,
Control basics Introduction to For deeper understanding of their usefulness, we deconstruct P, I, and D control functions. PID control Paul Avery Senior Product Training Engineer Yaskawa Electric America,
9/17/2015. Contents. ELEC-E8101 Digital and Optimal Control (5 cr), autumn 2015
, autumn 2015") ELEC-E8101 Digital and Optimal Control (5 cr), autumn 2015 Lectures Fridays at 12.15-14.00, room AS2 Lecturer: Kai Zenger, TuAS-house, room 3567, kai.zenger(at)aalto.fi Exercise hours Wednesdays at 14.15-16.00
ELEC-E8101 Digital and Optimal Control (5 cr), autumn 2015 Lectures Fridays at 12.15-14.00, room AS2 Lecturer: Kai Zenger, TuAS-house, room 3567, kai.zenger(at)aalto.fi Exercise hours Wednesdays at 14.15-16.00
Australian Defence Science in the 21 st Century
 Australian Defence Science in the 21 st Century Dr. Claire Davis Acknowledgements: Mr. Peter Kerr, Dr. Nigel McGinty, Dr. Karen O Connor, Dr. Roger Neill 1 Defence Science and Technology - At A Glance
Australian Defence Science in the 21 st Century Dr. Claire Davis Acknowledgements: Mr. Peter Kerr, Dr. Nigel McGinty, Dr. Karen O Connor, Dr. Roger Neill 1 Defence Science and Technology - At A Glance
BSNL TTA Question Paper Control Systems Specialization 2007
 BSNL TTA Question Paper Control Systems Specialization 2007 1. An open loop control system has its (a) control action independent of the output or desired quantity (b) controlling action, depending upon
BSNL TTA Question Paper Control Systems Specialization 2007 1. An open loop control system has its (a) control action independent of the output or desired quantity (b) controlling action, depending upon
Computer Sciences & Engineering Titles
 Bapatla Engineering College :: Library Science Direct e-journals 2016 subscribed by the College Library. Computer Sciences & Engineering - 275 Titles S No ISSN Journal Title Imprint Specialization Subject
Bapatla Engineering College :: Library Science Direct e-journals 2016 subscribed by the College Library. Computer Sciences & Engineering - 275 Titles S No ISSN Journal Title Imprint Specialization Subject
Building a comprehensive lab sequence for an undergraduate mechatronics program
 Building a comprehensive lab sequence for an undergraduate mechatronics program Tom Lee Ph.D., Chief Education Officer, Quanser MECHATRONICS Motivation The global engineering academic community is witnessing
Building a comprehensive lab sequence for an undergraduate mechatronics program Tom Lee Ph.D., Chief Education Officer, Quanser MECHATRONICS Motivation The global engineering academic community is witnessing
Digital Transformation. A Game Changer. How Does the Digital Transformation Affect Informatics as a Scientific Discipline?
 Digital Transformation A Game Changer How Does the Digital Transformation Affect Informatics as a Scientific Discipline? Manfred Broy Technische Universität München Institut for Informatics ... the change
Digital Transformation A Game Changer How Does the Digital Transformation Affect Informatics as a Scientific Discipline? Manfred Broy Technische Universität München Institut for Informatics ... the change
This list supersedes the one published in the November 2002 issue of CR.
 PERIODICALS RECEIVED This is the current list of periodicals received for review in Reviews. International standard serial numbers (ISSNs) are provided to facilitate obtaining copies of articles or subscriptions.
PERIODICALS RECEIVED This is the current list of periodicals received for review in Reviews. International standard serial numbers (ISSNs) are provided to facilitate obtaining copies of articles or subscriptions.
Heterogeneous Control of Small Size Unmanned Aerial Vehicles
 Magyar Kutatók 10. Nemzetközi Szimpóziuma 10 th International Symposium of Hungarian Researchers on Computational Intelligence and Informatics Heterogeneous Control of Small Size Unmanned Aerial Vehicles
Magyar Kutatók 10. Nemzetközi Szimpóziuma 10 th International Symposium of Hungarian Researchers on Computational Intelligence and Informatics Heterogeneous Control of Small Size Unmanned Aerial Vehicles
ELECTRICAL AND ELECTRONIC ENGINEERING COURSES
 ELECTRICAL AND ELECTRONIC ENGINEERING COURSES PH1012 PHYSICS A [Academic Units: 4.0 ; Pre-requisite: Nil ; Contact Hours: Lec: 39 hr ; Tut: 12 hrs] Vectors. Kinematics. Forces and torques. Newton s laws
ELECTRICAL AND ELECTRONIC ENGINEERING COURSES PH1012 PHYSICS A [Academic Units: 4.0 ; Pre-requisite: Nil ; Contact Hours: Lec: 39 hr ; Tut: 12 hrs] Vectors. Kinematics. Forces and torques. Newton s laws
Chapter 4 PID Design Example
 Chapter 4 PID Design Example I illustrate the principles of feedback control with an example. We start with an intrinsic process P(s) = ( )( ) a b ab = s + a s + b (s + a)(s + b). This process cascades
Chapter 4 PID Design Example I illustrate the principles of feedback control with an example. We start with an intrinsic process P(s) = ( )( ) a b ab = s + a s + b (s + a)(s + b). This process cascades
School of Systems and Enterprises: SE Transformation through Research. Stevens Institute of Technology, All Rights Reserved
 School of Systems and Enterprises: SE Transformation through Research Stevens Institute of Technology Founded in 1870 Stevens Institute of Technology 140 Years of Legacy First Institute of mechanical
School of Systems and Enterprises: SE Transformation through Research Stevens Institute of Technology Founded in 1870 Stevens Institute of Technology 140 Years of Legacy First Institute of mechanical
TRACK-FOLLOWING CONTROLLER FOR HARD DISK DRIVE ACTUATOR USING QUANTITATIVE FEEDBACK THEORY
 Proceedings of the IASTED International Conference Modelling, Identification and Control (AsiaMIC 2013) April 10-12, 2013 Phuket, Thailand TRACK-FOLLOWING CONTROLLER FOR HARD DISK DRIVE ACTUATOR USING
Proceedings of the IASTED International Conference Modelling, Identification and Control (AsiaMIC 2013) April 10-12, 2013 Phuket, Thailand TRACK-FOLLOWING CONTROLLER FOR HARD DISK DRIVE ACTUATOR USING
AUTOPILOT CONTROL SYSTEM - IV
 AUTOPILOT CONTROL SYSTEM - IV CONTROLLER The data from the inertial measurement unit is taken into the controller for processing. The input being analog requires to be passed through an ADC before being
AUTOPILOT CONTROL SYSTEM - IV CONTROLLER The data from the inertial measurement unit is taken into the controller for processing. The input being analog requires to be passed through an ADC before being
CSE 473 Artificial Intelligence (AI) Outline
 Outline") CSE 473 Artificial Intelligence (AI) Rajesh Rao (Instructor) Ravi Kiran (TA) http://www.cs.washington.edu/473 UW CSE AI faculty Goals of this course Logistics What is AI? Examples Challenges Outline 2
CSE 473 Artificial Intelligence (AI) Rajesh Rao (Instructor) Ravi Kiran (TA) http://www.cs.washington.edu/473 UW CSE AI faculty Goals of this course Logistics What is AI? Examples Challenges Outline 2
Subject-wise Tests Tests will be activated at 06:00 pm on scheduled day
 Subject Name EE-01 Control Systems EE-02 Systems and Signal Processing EE-03 Analog and Digital Electronics EE-04 Engineering Mathematics and Numerical Analysis EE-05 Electric Circuits and Fields EE-06
Subject Name EE-01 Control Systems EE-02 Systems and Signal Processing EE-03 Analog and Digital Electronics EE-04 Engineering Mathematics and Numerical Analysis EE-05 Electric Circuits and Fields EE-06
Brief Course Description for Electrical Engineering Department study plan
 Brief Course Description for Electrical Engineering Department study plan 2011-2015 Fundamentals of engineering (610111) The course is a requirement for electrical engineering students. It introduces the
Brief Course Description for Electrical Engineering Department study plan 2011-2015 Fundamentals of engineering (610111) The course is a requirement for electrical engineering students. It introduces the
INTRODUCTION TO KALMAN FILTERS
 ECE5550: Applied Kalman Filtering 1 1 INTRODUCTION TO KALMAN FILTERS 1.1: What does a Kalman filter do? AKalmanfilterisatool analgorithmusuallyimplementedasa computer program that uses sensor measurements
ECE5550: Applied Kalman Filtering 1 1 INTRODUCTION TO KALMAN FILTERS 1.1: What does a Kalman filter do? AKalmanfilterisatool analgorithmusuallyimplementedasa computer program that uses sensor measurements
Micaela Serra Dept. of Computer Science University of Victoria
 Micaela Serra Dept. of Computer Science University of Victoria The profile of the Computer Science graduate in 10 years : Computer Science, Computer Engineering, Software Engineering And Interdisciplinary
Micaela Serra Dept. of Computer Science University of Victoria The profile of the Computer Science graduate in 10 years : Computer Science, Computer Engineering, Software Engineering And Interdisciplinary
Lecture 9. Lab 16 System Identification (2 nd or 2 sessions) Lab 17 Proportional Control
 Lab 17 Proportional Control") 246 Lecture 9 Coming week labs: Lab 16 System Identification (2 nd or 2 sessions) Lab 17 Proportional Control Today: Systems topics System identification (ala ME4232) Time domain Frequency domain Proportional
246 Lecture 9 Coming week labs: Lab 16 System Identification (2 nd or 2 sessions) Lab 17 Proportional Control Today: Systems topics System identification (ala ME4232) Time domain Frequency domain Proportional
Intro to Cybernetics
 Intro to Cybernetics "If I were to choose a patron saint for cybernetics out of the history of science, I should have to choose Leibniz." ~ Norbert Wiener Cybernetics (1948) Some Antecedents Natural Science
Intro to Cybernetics "If I were to choose a patron saint for cybernetics out of the history of science, I should have to choose Leibniz." ~ Norbert Wiener Cybernetics (1948) Some Antecedents Natural Science
FLCS V2.1. AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station
 AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station The platform provides a high performance basis for electromechanical system control. Originally designed for autonomous aerial vehicle
AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station The platform provides a high performance basis for electromechanical system control. Originally designed for autonomous aerial vehicle
STUDY OF FIXED WING AIRCRAFT DYNAMICS USING SYSTEM IDENTIFICATION APPROACH
 STUDY OF FIXED WING AIRCRAFT DYNAMICS USING SYSTEM IDENTIFICATION APPROACH A.Kaviyarasu 1, Dr.A.Saravan Kumar 2 1,2 Department of Aerospace Engineering, Madras Institute of Technology, Anna University,
STUDY OF FIXED WING AIRCRAFT DYNAMICS USING SYSTEM IDENTIFICATION APPROACH A.Kaviyarasu 1, Dr.A.Saravan Kumar 2 1,2 Department of Aerospace Engineering, Madras Institute of Technology, Anna University,
Digital image processing vs. computer vision Higher-level anchoring
 Digital image processing vs. computer vision Higher-level anchoring Václav Hlaváč Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception
Digital image processing vs. computer vision Higher-level anchoring Václav Hlaváč Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception
MECHATRONICS IN BIOMEDICAL APPLICATIONS AND BIOMECHATRONICS
 MECHATRONICS IN BIOMEDICAL APPLICATIONS AND BIOMECHATRONICS Job van Amerongen Cornelis J. Drebbel Research Institute for Systems Engineering, Faculty of Electrical Engineering, University of Twente, P.O.
MECHATRONICS IN BIOMEDICAL APPLICATIONS AND BIOMECHATRONICS Job van Amerongen Cornelis J. Drebbel Research Institute for Systems Engineering, Faculty of Electrical Engineering, University of Twente, P.O.
CDS 101/110a: Lecture 8-1 Frequency Domain Design. Frequency Domain Performance Specifications
 CDS /a: Lecture 8- Frequency Domain Design Richard M. Murray 7 November 28 Goals:! Describe canonical control design problem and standard performance measures! Show how to use loop shaping to achieve a
CDS /a: Lecture 8- Frequency Domain Design Richard M. Murray 7 November 28 Goals:! Describe canonical control design problem and standard performance measures! Show how to use loop shaping to achieve a
Mechatronics: an introduction
 Introduction Mechatronics: an introduction Mechatronics is a subset of Cybernetics, being one where intelligent product design is the system under study. An alternate view is that it is the intersection
Introduction Mechatronics: an introduction Mechatronics is a subset of Cybernetics, being one where intelligent product design is the system under study. An alternate view is that it is the intersection
Journal Title ISSN 5. MIS QUARTERLY BRIEFINGS IN BIOINFORMATICS
 List of Journals with impact factors Date retrieved: 1 August 2009 Journal Title ISSN Impact Factor 5-Year Impact Factor 1. ACM SURVEYS 0360-0300 9.920 14.672 2. VLDB JOURNAL 1066-8888 6.800 9.164 3. IEEE
List of Journals with impact factors Date retrieved: 1 August 2009 Journal Title ISSN Impact Factor 5-Year Impact Factor 1. ACM SURVEYS 0360-0300 9.920 14.672 2. VLDB JOURNAL 1066-8888 6.800 9.164 3. IEEE
Optimal Control System Design
 Chapter 6 Optimal Control System Design 6.1 INTRODUCTION The active AFO consists of sensor unit, control system and an actuator. While designing the control system for an AFO, a trade-off between the transient
Chapter 6 Optimal Control System Design 6.1 INTRODUCTION The active AFO consists of sensor unit, control system and an actuator. While designing the control system for an AFO, a trade-off between the transient
Based on the ARM and PID Control Free Pendulum Balance System
 Available online at www.sciencedirect.com Procedia Engineering 29 (2012) 3491 3495 2012 International Workshop on Information and Electronics Engineering (IWIEE) Based on the ARM and PID Control Free Pendulum
Available online at www.sciencedirect.com Procedia Engineering 29 (2012) 3491 3495 2012 International Workshop on Information and Electronics Engineering (IWIEE) Based on the ARM and PID Control Free Pendulum
Institute of Physical and Chemical Research Flowcharts for Achieving Mid to Long-term Objectives
 Document 3-4 Institute of Physical and Chemical Research Flowcharts for Achieving Mid to Long-term Objectives Basic Research Promotion Division : Expected outcome : Output : Approach 1 3.1 Establishment
Document 3-4 Institute of Physical and Chemical Research Flowcharts for Achieving Mid to Long-term Objectives Basic Research Promotion Division : Expected outcome : Output : Approach 1 3.1 Establishment
PYKC 7 March 2019 EA2.3 Electronics 2 Lecture 18-1
 In this lecture, we will examine a very popular feedback controller known as the proportional-integral-derivative (PID) control method. This type of controller is widely used in industry, does not require
In this lecture, we will examine a very popular feedback controller known as the proportional-integral-derivative (PID) control method. This type of controller is widely used in industry, does not require
SELF STABILIZING PLATFORM
 SELF STABILIZING PLATFORM Shalaka Turalkar 1, Omkar Padvekar 2, Nikhil Chavan 3, Pritam Sawant 4 and Project Guide: Mr Prathamesh Indulkar 5. 1,2,3,4,5 Department of Electronics and Telecommunication,
SELF STABILIZING PLATFORM Shalaka Turalkar 1, Omkar Padvekar 2, Nikhil Chavan 3, Pritam Sawant 4 and Project Guide: Mr Prathamesh Indulkar 5. 1,2,3,4,5 Department of Electronics and Telecommunication,
ELECTRICAL ENGINEERING AND COMPUTER SCIENCE (EECS)
") ELECTRICAL ENGINEERING AND COMPUTER SCIENCE (EECS) DEPARTMENT CHAIR: B. Ross Barmish 407 Olin, 368-2802 E-mail: brb8@po.cwru.edu ASSOCIATE CHAIR FOR UNDERGRADUATE STUDIES Frank Merat 518 Glennan, 368-4572
ELECTRICAL ENGINEERING AND COMPUTER SCIENCE (EECS) DEPARTMENT CHAIR: B. Ross Barmish 407 Olin, 368-2802 E-mail: brb8@po.cwru.edu ASSOCIATE CHAIR FOR UNDERGRADUATE STUDIES Frank Merat 518 Glennan, 368-4572
ELG3336 Design of Mechatronics System
 ELG3336 Design of Mechatronics System Elements of a Data Acquisition System 2 Analog Signal Data Acquisition Hardware Your Signal Data Acquisition DAQ Device System Computer Cable Terminal Block Data Acquisition
ELG3336 Design of Mechatronics System Elements of a Data Acquisition System 2 Analog Signal Data Acquisition Hardware Your Signal Data Acquisition DAQ Device System Computer Cable Terminal Block Data Acquisition
Controlling of Quadrotor UAV Using a Fuzzy System for Tuning the PID Gains in Hovering Mode
 1 Controlling of Quadrotor UAV Using a Fuzzy System for Tuning the PID Gains in Hovering ode E. Abbasi 1,. J. ahjoob 2, R. Yazdanpanah 3 Center for echatronics and Automation, School of echanical Engineering
1 Controlling of Quadrotor UAV Using a Fuzzy System for Tuning the PID Gains in Hovering ode E. Abbasi 1,. J. ahjoob 2, R. Yazdanpanah 3 Center for echatronics and Automation, School of echanical Engineering