Smart drones for innovative water monitoring within the INTCATCH H2020 project
|
|
|
- Cornelius Lambert
- 5 years ago
- Views:
Transcription
1 Development and application of Novel, Integrated Tools for monitoring and managing Catchments Smart drones for innovative water monitoring within the INTCATCH H2020 project GARDEN Lake GARDa ENvironmental System 2nd International Scientific Workshop Alessandro Farinelli Manerba del Garda, 10 May 2018 H2O H 2O This project has received funding from the European Union s Horizon 2020 research and innovation programme under grant agreement No

2 WHY ROBOTIC BOATS? Sensors deployed right place right time: effective decision making and management of local diffuse pollution EC Day 1 EC Day 2 Data captured by local stakeholders Citizen Science 2

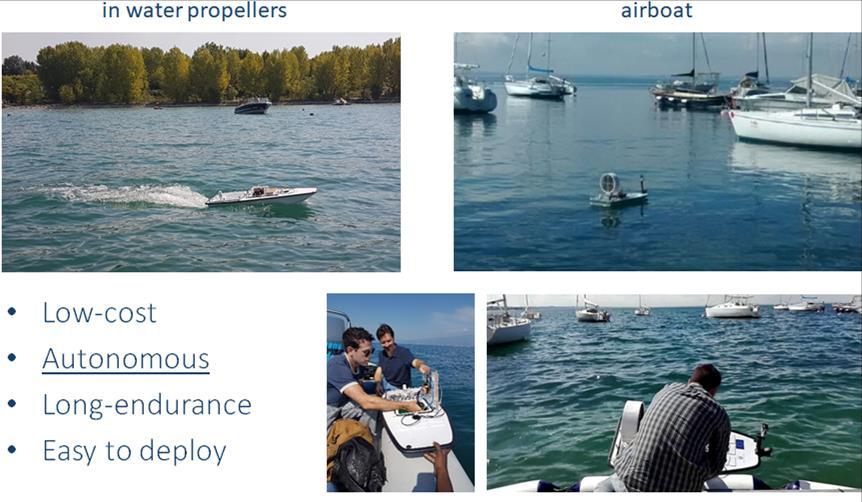
3 ROBOTICS FOR WATER MONITORING Large, expensive small, low-cost Community engagement 3

4 AUTONOMOUS BOATS real time data visualization EGU


5 WHY AUTONOMY? Minimize human intervention Facilitate data collection for non expert users boat 5





6 SYSTEM ARCHITECTURE RC controller - direct control of the boat - long range connection The boat can be controlled by a wi-fi connected tablet or a radio controller The user can define a path on the tablet that the boat follows, navigating autonomously Different sensors to measure electrical conductivity temperature dissolved oxygen BlueBox sensor management direct commands 6




")
7 EQUIPMENT AND FUNCTIONALITIES DO ph EC (T) ISA (SAC-254, Chl-a NO3 eq, TOC eq, DOC eq, COD eq, TSS eq, Turb eq ) Oil/Hyd WAIS Cloud Data Base On-line data (real time)
 Thanks to Atlandide Fishing")
8 TEST DEPLOYMENT IN FISHING LAKE Pre-defined path loaded to the system Four hours in complete autonomy (one battery switch) Thanks to Atlandide Fishing 8

9 DEPLOYMENT IN RIVER TER (URBAN AREA) 9

10 WIDE AREA MONITORING IN LAKE GARDA 10
 Jars: four, 500 ml")
11 INTEGRATED SAMPLING SYSTEM Sample based on data: parameter above a given threshold significant change of parameter near a GPS position remote command Weight sampling device: 3 kg (water filled 5 kg) Jars: four, 500 ml each 11

12 USING VISUAL INFORMATION FOR NAVIGATION 12
13 AUTONOMOUS DRIVING WITH COLLISION AVOIDANCE 13

14 WATER LINE DETECTION 14

15 VIDEO STABILIZATION

16 WATER LINE DETECTION PIPELINE 16



17 DATASET Data available at IntCatch AI - Deep Learning Water Segmentation Source code available at

18 RESULTS


19 CHALLENGING SITUATIONS The contour of a boat begins to appear and is classified correctly. RANSAC line sticks to dominant horizon line Waterline construct breaks down completely, motivating the use of a water contour 19
20 INTERESTING DIRECTIONS BETTER AUTONOMY recognize situations (e.g., upstream/downbstream) plan in face of uncertainty (e.g., regulate speed to minimize battery usage) autonomous coastal navigation (based on vision) ENHANCE DRONE EQUIPMENT DNA based analysis detecting microplastic ENHANCE DATA VISUALIZATION integrate different source of information basic processing to better display data Join forces to work towards integrated systems: joint measuring campaigns, calibrating remote sensing, 20
21 AI GROUP IN VERONA Faculty Alessandro Farinelli Domenico Bloisi PhD students Lorenzo Bottarelli Riccardo Sartea Alumni Filippo Bistaffa Masoume Raeissi Post-Doc Alberto Castellini Research Fellows Jason Blum Matteo Murari THANK YOU! 21





22 Development and application of Novel, Integrated Tools for monitoring and managing Catchments Special thanks to Lega Navale Italiana Sezione Garda Polizia di Stato This project has received funding from the European Union s Horizon 2020 research and innovation programme under grant agreement No
23 Development and application of Novel, Integrated Tools for monitoring and managing Catchments Smart drones for innovative water monitoring within the INTCATCH H2020 project GARDEN Lake GARDa ENvironmental System 2nd International Scientific Workshop Alessandro Farinelli Manerba del Garda, 10 May 2018 H2O H 2O This project has received funding from the European Union s Horizon 2020 research and innovation programme under grant agreement No
24 CNN ARCHITECTURE Source code available at 24

25 USER INTERFACE AND PATH CREATION The tablet app generates a spiral path to collect data in the area 25

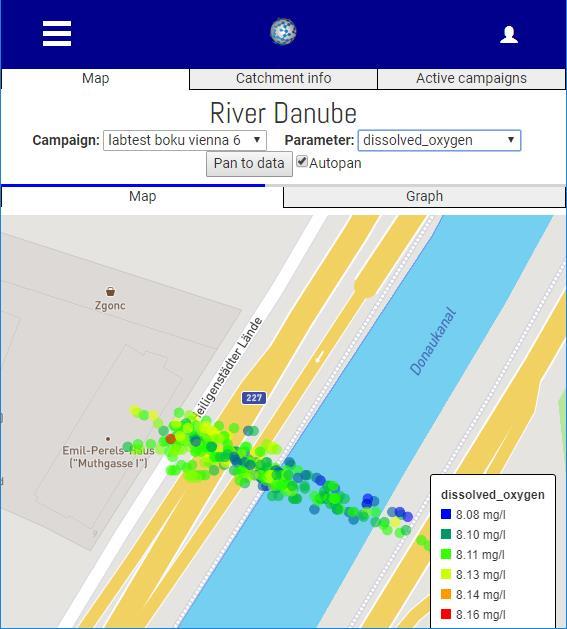
26 DATA VISUALIZATION: MAP OVERLAY Dense geo-localized data for the different parameters 26
MFAM: Miniature Fabricated Atomic Magnetometer for Autonomous Magnetic Surveys
 MFAM: Miniature Fabricated Atomic Magnetometer for Autonomous Magnetic Surveys Bart Hoekstra Rahul Mhaskar Drones Applied to Geophysical Mapping Workshop Unmanned Vehicles The Future of Geophysics REMUS
MFAM: Miniature Fabricated Atomic Magnetometer for Autonomous Magnetic Surveys Bart Hoekstra Rahul Mhaskar Drones Applied to Geophysical Mapping Workshop Unmanned Vehicles The Future of Geophysics REMUS
TEAMS OF ROBOTIC BOATS. Paul Scerri Associate Research Professor Robotics Institute Carnegie Mellon University
 TEAMS OF ROBOTIC BOATS Paul Scerri Associate Research Professor Robotics Institute Carnegie Mellon University pscerri@cs.cmu.edu CHALLENGE: MAXIMIZE THE AMOUNT OF USEFUL KNOWLEDGE IN THE AVAILABLE TIME
TEAMS OF ROBOTIC BOATS Paul Scerri Associate Research Professor Robotics Institute Carnegie Mellon University pscerri@cs.cmu.edu CHALLENGE: MAXIMIZE THE AMOUNT OF USEFUL KNOWLEDGE IN THE AVAILABLE TIME
The design and calibration of low cost urban acoustic sensing devices. SONYC Sounds Of New York City
 The design and calibration of low cost urban acoustic sensing devices SONYC Sounds Of New York City C. Mydlarz NYU CUSP C. Shamoon NYC DEP M. Baglione, M Pimpinella The Cooper Union cmydlarz@nyu.edu Sounds
The design and calibration of low cost urban acoustic sensing devices SONYC Sounds Of New York City C. Mydlarz NYU CUSP C. Shamoon NYC DEP M. Baglione, M Pimpinella The Cooper Union cmydlarz@nyu.edu Sounds
Background. Area of Concern
 Background Pollution is a large problem within rivers and streams across the nation. The Virtual Boat of Knowledge is set forth to help educate people, young and old alike, about the environmental issue
Background Pollution is a large problem within rivers and streams across the nation. The Virtual Boat of Knowledge is set forth to help educate people, young and old alike, about the environmental issue
A Course on Marine Robotic Systems: Theory to Practice. Full Programme
 A Course on Marine Robotic Systems: Theory to Practice 27-31 January, 2015 National Institute of Oceanography, Dona Paula, Goa Opening address by the Director of NIO Full Programme 1. Introduction and
A Course on Marine Robotic Systems: Theory to Practice 27-31 January, 2015 National Institute of Oceanography, Dona Paula, Goa Opening address by the Director of NIO Full Programme 1. Introduction and
Ethical issues raised by big data and real world evidence projects. Dr Andrew Turner
 Ethical issues raised by big data and real world evidence projects Dr Andrew Turner andrew.turner@oii.ox.ac.uk December 8, 2017 What is real world evidence and big data? Real world evidence is evidence
Ethical issues raised by big data and real world evidence projects Dr Andrew Turner andrew.turner@oii.ox.ac.uk December 8, 2017 What is real world evidence and big data? Real world evidence is evidence
Free Flight Mapping: Pix4Dcapture & dji Spark Jerry Davis, SFSU Institute for Geographic Information Science
 Free Flight Mapping: Pix4Dcapture & dji Spark Jerry Davis, SFSU Institute for Geographic Information Science The best way to do mapping is using a GPS guided grid pattern programmed by an app like Tower
Free Flight Mapping: Pix4Dcapture & dji Spark Jerry Davis, SFSU Institute for Geographic Information Science The best way to do mapping is using a GPS guided grid pattern programmed by an app like Tower
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS. Sergii Bykov Technical Lead Machine Learning 12 Oct 2017
 23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
The CITI-SENSE Study Lessons Learned from a "Citizen Science" study
 The CITI-SENSE Study 2012-2016 Lessons Learned from a "Citizen Science" study Alena Bartonova, PhD on behalf of the CITI-SENSE consortium CITI-SENSE coordinator alena.bartonova@nilu.no NILU - Norwegian
The CITI-SENSE Study 2012-2016 Lessons Learned from a "Citizen Science" study Alena Bartonova, PhD on behalf of the CITI-SENSE consortium CITI-SENSE coordinator alena.bartonova@nilu.no NILU - Norwegian
Disrupting our way to a Very Human City
 Disrupting our way to a Very Human City Zagreb Forum 2017 Technology Park Zagreb 20 th November 2017 Steve Wells COO, Fast Future Publishing steve@fastfuturepublishing.com Image: http://www.bbc.com Through
Disrupting our way to a Very Human City Zagreb Forum 2017 Technology Park Zagreb 20 th November 2017 Steve Wells COO, Fast Future Publishing steve@fastfuturepublishing.com Image: http://www.bbc.com Through
IPRO 312: Unmanned Aerial Systems
 IPRO 312: Unmanned Aerial Systems Kay, Vlad, Akshay, Chris, Andrew, Sebastian, Anurag, Ani, Ivo, Roger Dr. Vural Diverse IPRO Group ECE MMAE BME ARCH CS Outline Background Approach Team Research Integration
IPRO 312: Unmanned Aerial Systems Kay, Vlad, Akshay, Chris, Andrew, Sebastian, Anurag, Ani, Ivo, Roger Dr. Vural Diverse IPRO Group ECE MMAE BME ARCH CS Outline Background Approach Team Research Integration
Autonomous Mobile Robot Design. Dr. Kostas Alexis (CSE)
") Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
Computer-Aided Safety and Risk Prevention Pushing collaborative robotics from isolated pilots to large scale deployment
 Pushing collaborative robotics from isolated pilots to large scale deployment INRS, Nancy, France J. Saenz, C. Vogel, R. Behrens, E. Schulenburg, C. Walter, N. Elkmann 30.03.2017 Fraunhofer IFF Fraunhofer
Pushing collaborative robotics from isolated pilots to large scale deployment INRS, Nancy, France J. Saenz, C. Vogel, R. Behrens, E. Schulenburg, C. Walter, N. Elkmann 30.03.2017 Fraunhofer IFF Fraunhofer
Technology Roadmapping. Lesson 3
 Technology Roadmapping Lesson 3 Leadership in Science & Technology Management Mission Vision Strategy Goals/ Implementation Strategy Roadmap Creation Portfolios Portfolio Roadmap Creation Project Prioritization
Technology Roadmapping Lesson 3 Leadership in Science & Technology Management Mission Vision Strategy Goals/ Implementation Strategy Roadmap Creation Portfolios Portfolio Roadmap Creation Project Prioritization
Fire Fighter Location Tracking & Status Monitoring Performance Requirements
 Fire Fighter Location Tracking & Status Monitoring Performance Requirements John A. Orr and David Cyganski orr@wpi.edu, cyganski@wpi.edu Electrical and Computer Engineering Department Worcester Polytechnic
Fire Fighter Location Tracking & Status Monitoring Performance Requirements John A. Orr and David Cyganski orr@wpi.edu, cyganski@wpi.edu Electrical and Computer Engineering Department Worcester Polytechnic
Joint Open Lab and PHD proposal
 GRUPPO TELECOM ITALIA Joint Open Lab and PHD proposal Politecnico di Torino Aprile 2015 Joint Open Lab : Project at a glance Joint Open Labs are research and innovation laboratories set up within university
GRUPPO TELECOM ITALIA Joint Open Lab and PHD proposal Politecnico di Torino Aprile 2015 Joint Open Lab : Project at a glance Joint Open Labs are research and innovation laboratories set up within university
ABOUT SSB. 6. Does it require connections to the Wi-Fi network? No, SSB does not require additional connection to WiFi network.
 ABOUT SSB 1. What is Strawberry Smart Bench (SSB)? SSB is a next generation of street furniture, powered by solar energy, that offers new, modern utilities of public interest, like power and connectivity
ABOUT SSB 1. What is Strawberry Smart Bench (SSB)? SSB is a next generation of street furniture, powered by solar energy, that offers new, modern utilities of public interest, like power and connectivity
PI: Rhoads. ERRoS: Energetic and Reactive Robotic Swarms
 ERRoS: Energetic and Reactive Robotic Swarms 1 1 Introduction and Background As articulated in a recent presentation by the Deputy Assistant Secretary of the Army for Research and Technology, the future
ERRoS: Energetic and Reactive Robotic Swarms 1 1 Introduction and Background As articulated in a recent presentation by the Deputy Assistant Secretary of the Army for Research and Technology, the future
Integrated Data Handling and Visualization
 Integrated Data Handling and Visualization Module of Remote Sensing and GIS Integration Course 2017 Lammert Kooistra, Ron van Lammeren, John Stuiver Environmental Resource Management in the Anthropocene
Integrated Data Handling and Visualization Module of Remote Sensing and GIS Integration Course 2017 Lammert Kooistra, Ron van Lammeren, John Stuiver Environmental Resource Management in the Anthropocene
Human-Centric Trusted AI for Data-Driven Economy
 Human-Centric Trusted AI for Data-Driven Economy Masugi Inoue 1 and Hideyuki Tokuda 2 National Institute of Information and Communications Technology inoue@nict.go.jp 1, Director, International Research
Human-Centric Trusted AI for Data-Driven Economy Masugi Inoue 1 and Hideyuki Tokuda 2 National Institute of Information and Communications Technology inoue@nict.go.jp 1, Director, International Research
Development and Integration of Artificial Intelligence Technologies for Innovation Acceleration
 Development and Integration of Artificial Intelligence Technologies for Innovation Acceleration Research Supervisor: Minoru Etoh (Professor, Open and Transdisciplinary Research Initiatives, Osaka University)
Development and Integration of Artificial Intelligence Technologies for Innovation Acceleration Research Supervisor: Minoru Etoh (Professor, Open and Transdisciplinary Research Initiatives, Osaka University)
CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM
 CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM Aniket D. Kulkarni *1, Dr.Sayyad Ajij D. *2 *1(Student of E&C Department, MIT Aurangabad, India) *2(HOD of E&C department, MIT Aurangabad, India) aniket2212@gmail.com*1,
CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM Aniket D. Kulkarni *1, Dr.Sayyad Ajij D. *2 *1(Student of E&C Department, MIT Aurangabad, India) *2(HOD of E&C department, MIT Aurangabad, India) aniket2212@gmail.com*1,
The new deal of data in the data-driven person centric-care
 The new deal of data in the data-driven person centric-care Maritta Perälä-Heape, Professor of practice, University of Oulu, Faculty of Medicine, Center for health and technology, Oulu, Finland OuluHealth
The new deal of data in the data-driven person centric-care Maritta Perälä-Heape, Professor of practice, University of Oulu, Faculty of Medicine, Center for health and technology, Oulu, Finland OuluHealth
Noise monitoring solution. Continuous noise monitoring system
 Noise monitoring solution Continuous noise monitoring system CONTINUOUS NOISE MONITORING SYSTEM Continuous noise monitoring system Noise monitoring network based on a wireless sensor network Real time
Noise monitoring solution Continuous noise monitoring system CONTINUOUS NOISE MONITORING SYSTEM Continuous noise monitoring system Noise monitoring network based on a wireless sensor network Real time
Mobile Crowd Sensing-based Noise Monitoring as a Way to Improve Learning quality on Acoustics
 Mobile Crowd Sensing-based Noise Monitoring as a Way to Improve Learning quality on Acoustics Salonicco, 19,11.15 Marco Zappatore Antonella Longo, Mario A. Bochicchio Daniele Zappatore Alessandro A. Morrone
Mobile Crowd Sensing-based Noise Monitoring as a Way to Improve Learning quality on Acoustics Salonicco, 19,11.15 Marco Zappatore Antonella Longo, Mario A. Bochicchio Daniele Zappatore Alessandro A. Morrone
A Reconfigurable Citizen Observatory Platform for the Brussels Capital Region. by Jesse Zaman
 1 A Reconfigurable Citizen Observatory Platform for the Brussels Capital Region by Jesse Zaman 2 Key messages Today s citizen observatories are beyond the reach of most societal stakeholder groups. A generic
1 A Reconfigurable Citizen Observatory Platform for the Brussels Capital Region by Jesse Zaman 2 Key messages Today s citizen observatories are beyond the reach of most societal stakeholder groups. A generic
Collaborative Robots and the factory of the future. Nicolas De Keijser Assembly & Test Business Line Manager, USA
 2018-09-26 Collaborative Robots and the factory of the future Nicolas De Keijser Assembly & Test Business Line Manager, USA Strong Growth for Collaborative Robots Forecasted October 1, 2018 Slide 2 ABB
2018-09-26 Collaborative Robots and the factory of the future Nicolas De Keijser Assembly & Test Business Line Manager, USA Strong Growth for Collaborative Robots Forecasted October 1, 2018 Slide 2 ABB
INDUSTRY 4.0. Modern massive Data Analysis for Industry 4.0 Industry 4.0 at VŠB-TUO
 INDUSTRY 4.0 Modern massive Data Analysis for Industry 4.0 Industry 4.0 at VŠB-TUO Václav Snášel Faculty of Electrical Engineering and Computer Science VŠB-TUO Czech Republic AGENDA 1. Industry 4.0 2.
INDUSTRY 4.0 Modern massive Data Analysis for Industry 4.0 Industry 4.0 at VŠB-TUO Václav Snášel Faculty of Electrical Engineering and Computer Science VŠB-TUO Czech Republic AGENDA 1. Industry 4.0 2.
Underwater Vehicle Systems at IFREMER. From R&D to operational systems. Jan Opderbecke IFREMER Unit for Underwater Systems
 Underwater Vehicle Systems at IFREMER From R&D to operational systems Jan Opderbecke IFREMER Unit for Underwater Systems Operational Engineering Mechanical and systems engineering Marine robotics, mapping,
Underwater Vehicle Systems at IFREMER From R&D to operational systems Jan Opderbecke IFREMER Unit for Underwater Systems Operational Engineering Mechanical and systems engineering Marine robotics, mapping,
Satellite navigation applications: opportunities from the European GNSS. Fiammetta Diani Deputy Head of Market Development European GNSS Agency
 Satellite navigation applications: opportunities from the European GNSS Fiammetta Diani Deputy Head of Market Development European GNSS Agency FP7 success story in Lithuania COSUDEC Coastal Surveying of
Satellite navigation applications: opportunities from the European GNSS Fiammetta Diani Deputy Head of Market Development European GNSS Agency FP7 success story in Lithuania COSUDEC Coastal Surveying of
Pipeline Inspection and Environmental Monitoring Using AUVs
 Pipeline Inspection and Environmental Monitoring Using AUVs Bjørn Jalving, Bjørn Gjelstad, Kongsberg Maritime AUV Workshop, IRIS Biomiljø, 7 8 September 2011 WORLD CLASS through people, technology and
Pipeline Inspection and Environmental Monitoring Using AUVs Bjørn Jalving, Bjørn Gjelstad, Kongsberg Maritime AUV Workshop, IRIS Biomiljø, 7 8 September 2011 WORLD CLASS through people, technology and
Vision and Strategy to Enhance the Safety Management of Small and Medium Ships in the Era of the Fourth Industrial Revolution
 Vision and Strategy to Enhance the Safety Management of Small and Medium Ships in the Era of the Fourth Industrial Revolution International Safety@Sea Conference 2018 Singapore 21 June 2018 Y. S. Lee President
Vision and Strategy to Enhance the Safety Management of Small and Medium Ships in the Era of the Fourth Industrial Revolution International Safety@Sea Conference 2018 Singapore 21 June 2018 Y. S. Lee President
PhD in ELECTRICAL ENGINEERING - 30th cycle
 PhD in ELECTRICAL ENGINEERING - 30th cycle Number of scholarship offered Department 4 Dipartimento di Energia Description of the PhD Programme The PhD Programme in Electrical Engineering is based on both
PhD in ELECTRICAL ENGINEERING - 30th cycle Number of scholarship offered Department 4 Dipartimento di Energia Description of the PhD Programme The PhD Programme in Electrical Engineering is based on both
What are the living labs and how to create one? Intgen Project Meeting The 4th June 2015 Dr. Lauri Tuomi
 What are the living labs and how to create one? Intgen Project Meeting The 4th June Dr. Lauri Tuomi Content of the presentation Open Innovation and Living Labs world wide Open Living Lab cases Conclusions
What are the living labs and how to create one? Intgen Project Meeting The 4th June Dr. Lauri Tuomi Content of the presentation Open Innovation and Living Labs world wide Open Living Lab cases Conclusions
ABCPhD CALL4SCHOLARSHIP 33 Research topic: Design for All in Healthcare Facilities
 ABC PhD DOCTORAL PROGRAM IN ARCHITECTURE BUILT ENVIRONMENT AND CONSTRUCTION ENGINEERING ABCPhD CALL4SCHOLARSHIP 33 Research topic: Design for All in Healthcare Facilities (33 - Annex 1.2) Funding and management
ABC PhD DOCTORAL PROGRAM IN ARCHITECTURE BUILT ENVIRONMENT AND CONSTRUCTION ENGINEERING ABCPhD CALL4SCHOLARSHIP 33 Research topic: Design for All in Healthcare Facilities (33 - Annex 1.2) Funding and management
Development of Microsatellite to Detect Illegal Fishing MS-SAT
 Development of Microsatellite to Detect Illegal Fishing MS-SAT Ernest S. C. P. Bintang A.S.W.A.M. Department of Aerospace Engineering Faculty of Mechanical and Aerospace Engineering Institut Teknologi
Development of Microsatellite to Detect Illegal Fishing MS-SAT Ernest S. C. P. Bintang A.S.W.A.M. Department of Aerospace Engineering Faculty of Mechanical and Aerospace Engineering Institut Teknologi
Alena Bartonova, CITI-SENSE coordinator. CITI-SENSE FP7 R&I Grant agreement nº:
 Alena Bartonova, CITI-SENSE coordinator aba@nilu.no http://co.citi-sense.eu CITI-SENSE FP7 R&I Grant agreement nº: 308524 CITI-SENSE consortium CITI-SENSE FP7 R&I Grant agreement nº: 308524 Our motivation
Alena Bartonova, CITI-SENSE coordinator aba@nilu.no http://co.citi-sense.eu CITI-SENSE FP7 R&I Grant agreement nº: 308524 CITI-SENSE consortium CITI-SENSE FP7 R&I Grant agreement nº: 308524 Our motivation
Roles of Artificial Intelligence and Machine Learning in Future Mobility
 Roles of Artificial Intelligence and Machine Learning in Future Mobility Huang Guangbin Professor of School of Electrical and Electronic Engineering Nanyang Technological University, Singapore ITU/IMDA
Roles of Artificial Intelligence and Machine Learning in Future Mobility Huang Guangbin Professor of School of Electrical and Electronic Engineering Nanyang Technological University, Singapore ITU/IMDA
The Path to Real World Autonomy for Autonomous Surface Vehicles
 Authors: Howard Tripp, PhD, MSc, MA (Cantab), Autonomous Systems R&D Lead, ASV Global, Portchester, United Kingdom, Richard Daltry, CEng, MRINA, Technical Director, ASV Global, Portchester, United Kingdom,
Authors: Howard Tripp, PhD, MSc, MA (Cantab), Autonomous Systems R&D Lead, ASV Global, Portchester, United Kingdom, Richard Daltry, CEng, MRINA, Technical Director, ASV Global, Portchester, United Kingdom,
EUROPEAN GNSS ADOPTION OPPORTUNITIES IN TRANSPORT WITH FOCUS ON RAIL
 EUROPEAN GNSS ADOPTION OPPORTUNITIES IN TRANSPORT WITH FOCUS ON RAIL Gian Gherardo Calini European GNSS Agency III Workshop GNSS Technology Advances in a Multi-Constellation Framework 22 January 2016 This
EUROPEAN GNSS ADOPTION OPPORTUNITIES IN TRANSPORT WITH FOCUS ON RAIL Gian Gherardo Calini European GNSS Agency III Workshop GNSS Technology Advances in a Multi-Constellation Framework 22 January 2016 This
Space Challenges Preparing the next generation of explorers. The Program
 Space Challenges Preparing the next generation of explorers Space Challenges is the biggest free educational program in the field of space science and high technologies in the Balkans - http://spaceedu.net
Space Challenges Preparing the next generation of explorers Space Challenges is the biggest free educational program in the field of space science and high technologies in the Balkans - http://spaceedu.net
Science on the Fly. Preview. Autonomous Science for Rover Traverse. David Wettergreen The Robotics Institute Carnegie Mellon University
 Science on the Fly Autonomous Science for Rover Traverse David Wettergreen The Robotics Institute University Preview Motivation and Objectives Technology Research Field Validation 1 Science Autonomy Science
Science on the Fly Autonomous Science for Rover Traverse David Wettergreen The Robotics Institute University Preview Motivation and Objectives Technology Research Field Validation 1 Science Autonomy Science
Cruise Automation on Marine Boats. Project Proposal Document
 Cruise Automation on Marine Boats Project Proposal Document October 8, 2013 Team Members: 1. Güliz Coşan, 1745843, gulizcsn@gmail.com 2. Hacer Ece Erden, 1745934, hacerece@gmail.com 3. M. Feyzullah
Cruise Automation on Marine Boats Project Proposal Document October 8, 2013 Team Members: 1. Güliz Coşan, 1745843, gulizcsn@gmail.com 2. Hacer Ece Erden, 1745934, hacerece@gmail.com 3. M. Feyzullah
Final Design Report. Project Title: Multi-Function Pontoon (MFP)
") EEL 4924 Electrical Engineering Design (Senior Design) Final Design Report 25 April 2012 Project Title: Multi-Function Pontoon (MFP) Team Members: Name: Mikkel Gabbadon Name: Sheng-Po Fang Project Abstract:
EEL 4924 Electrical Engineering Design (Senior Design) Final Design Report 25 April 2012 Project Title: Multi-Function Pontoon (MFP) Team Members: Name: Mikkel Gabbadon Name: Sheng-Po Fang Project Abstract:
APPROACHES TO FUSE FIXED AND MOBILE AIR QUALITY SENSORS
 APPROACHES TO FUSE FIXED AND MOBILE AIR QUALITY SENSORS ISESS 2017, Zadar, Croatia Gerhard Dünnebeil, AIT Martina Marjanović, University of Zagreb, Faculty of Electrical Engineering and Computing Ivana
APPROACHES TO FUSE FIXED AND MOBILE AIR QUALITY SENSORS ISESS 2017, Zadar, Croatia Gerhard Dünnebeil, AIT Martina Marjanović, University of Zagreb, Faculty of Electrical Engineering and Computing Ivana
Cognitive robots and emotional intelligence Cloud robotics Ethical, legal and social issues of robotic Construction robots Human activities in many
 Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
SEAVENTION AUTONOMOUS SUBSEA INTERVENTION
 SEAVENTION AUTONOMOUS SUBSEA INTERVENTION Aksel A. Transeth, senior research scientist, SINTEF Digital Adapting to the Digital Future: The subsea industry in 20 years, 1 Nov 2018 2 TECHNOLOGY FOR A BETTER
SEAVENTION AUTONOMOUS SUBSEA INTERVENTION Aksel A. Transeth, senior research scientist, SINTEF Digital Adapting to the Digital Future: The subsea industry in 20 years, 1 Nov 2018 2 TECHNOLOGY FOR A BETTER
Factories of the Future 2020 Roadmap. PPP Info Days 9 July 2012 Rikardo Bueno Anirban Majumdar
 Factories of the Future 2020 Roadmap PPP Info Days 9 July 2012 Rikardo Bueno Anirban Majumdar RD&I roadmap 2014-2020 roadmap will cover R&D and innovation activities guiding principles: industry competitiveness,
Factories of the Future 2020 Roadmap PPP Info Days 9 July 2012 Rikardo Bueno Anirban Majumdar RD&I roadmap 2014-2020 roadmap will cover R&D and innovation activities guiding principles: industry competitiveness,
Artificial intelligence & autonomous decisions. From judgelike Robot to soldier Robot
 Artificial intelligence & autonomous decisions From judgelike Robot to soldier Robot Danièle Bourcier Director of research CNRS Paris 2 University CC-ND-NC Issues Up to now, it has been assumed that machines
Artificial intelligence & autonomous decisions From judgelike Robot to soldier Robot Danièle Bourcier Director of research CNRS Paris 2 University CC-ND-NC Issues Up to now, it has been assumed that machines
ESA Activities in Health in support of the Sustainable Development Goals and WHO Leadership Priorities
 ESA Activities in Health in support of the Sustainable Development Goals and WHO Leadership Priorities Jason Hatton, Head of the Biology and Environmental Monitoring Office Science Department, Directorate
ESA Activities in Health in support of the Sustainable Development Goals and WHO Leadership Priorities Jason Hatton, Head of the Biology and Environmental Monitoring Office Science Department, Directorate
Targeting a Safer World. Public Safety & Security
 Targeting a Safer World Public Safety & Security WORLD S MOST EFFECTIVE AND AFFORDABLE WIDE-AREA SITUATIONAL AWARENESS Accipiter provides the world s most effective and affordable wide-area situational
Targeting a Safer World Public Safety & Security WORLD S MOST EFFECTIVE AND AFFORDABLE WIDE-AREA SITUATIONAL AWARENESS Accipiter provides the world s most effective and affordable wide-area situational
SUT, Aberdeen November Exeter London Glasgow Houston Calgary
 SUT, Aberdeen November 2018 Exeter London Glasgow Houston Calgary Mission - The Digital Age Delivering increased safety and visibility of assets, processes and infrastructure whilst reducing cost/ risk
SUT, Aberdeen November 2018 Exeter London Glasgow Houston Calgary Mission - The Digital Age Delivering increased safety and visibility of assets, processes and infrastructure whilst reducing cost/ risk
The Galileo and EGNOS Programmes
 The Galileo and EGNOS Programmes Dominic Hayes European Commission ignss, Gold Coast, 14 July 2015 The European GNSS Programmes 2 Organisation and Contractual Frameworks European Union Member States (28)
The Galileo and EGNOS Programmes Dominic Hayes European Commission ignss, Gold Coast, 14 July 2015 The European GNSS Programmes 2 Organisation and Contractual Frameworks European Union Member States (28)
From Smart City to Smartphone City: Towards a Telematic Digital Strategy In Urban Environments
 From Smart City to Smartphone City: Towards a Telematic Digital Strategy In Urban Environments Elmar Trefz University of Technology Sydney Submitted to the Faculty of Design Architecture and Building in
From Smart City to Smartphone City: Towards a Telematic Digital Strategy In Urban Environments Elmar Trefz University of Technology Sydney Submitted to the Faculty of Design Architecture and Building in
OPAL Oil & Gas Conference 2018
 OPAL Oil & Gas Conference 2018 2 4 December 2018, Muscat, The Sultanate of Oman Shaping the future of Oman s oil and gas industry - minimizing capital requirements and improving efficiency OPAL Oil and
OPAL Oil & Gas Conference 2018 2 4 December 2018, Muscat, The Sultanate of Oman Shaping the future of Oman s oil and gas industry - minimizing capital requirements and improving efficiency OPAL Oil and
Virtual Worlds for the Perception and Control of Self-Driving Vehicles
 Virtual Worlds for the Perception and Control of Self-Driving Vehicles Dr. Antonio M. López antonio@cvc.uab.es Index Context SYNTHIA: CVPR 16 SYNTHIA: Reloaded SYNTHIA: Evolutions CARLA Conclusions Index
Virtual Worlds for the Perception and Control of Self-Driving Vehicles Dr. Antonio M. López antonio@cvc.uab.es Index Context SYNTHIA: CVPR 16 SYNTHIA: Reloaded SYNTHIA: Evolutions CARLA Conclusions Index
The impact of rapid technological change on sustainable development
 15-17 January 2019, Vienna The impact of rapid technological change on sustainable development Shamika N. Sirimanne Director, Division on Technology and Logistics UNCTAD 2018-2019 CSTD Intersessional Panel
15-17 January 2019, Vienna The impact of rapid technological change on sustainable development Shamika N. Sirimanne Director, Division on Technology and Logistics UNCTAD 2018-2019 CSTD Intersessional Panel
SESAR EXPLORATORY RESEARCH. Dr. Stella Tkatchova 21/07/2015
 SESAR EXPLORATORY RESEARCH Dr. Stella Tkatchova 21/07/2015 1 Why SESAR? European ATM - Essential component in air transport system (worth 8.4 billion/year*) 2 FOUNDING MEMBERS Complex infrastructure =
SESAR EXPLORATORY RESEARCH Dr. Stella Tkatchova 21/07/2015 1 Why SESAR? European ATM - Essential component in air transport system (worth 8.4 billion/year*) 2 FOUNDING MEMBERS Complex infrastructure =
INSTITUTO de SISTEMAS E ROBÓTICA Institute for Systems and Robotics
 - Lisboa INSTITUTO de SISTEMAS E ROBÓTICA Mission and Goals ISR-Lisbon is an RD&I institution, affiliated to the Instituto Superior Técnico (IST), where multidisciplinary advanced research activities are
- Lisboa INSTITUTO de SISTEMAS E ROBÓTICA Mission and Goals ISR-Lisbon is an RD&I institution, affiliated to the Instituto Superior Técnico (IST), where multidisciplinary advanced research activities are
 Building safe, smart, and efficient embedded systems for applications in life-critical control, communication, and computation. http://precise.seas.upenn.edu The Future of CPS We established the Penn Research
Building safe, smart, and efficient embedded systems for applications in life-critical control, communication, and computation. http://precise.seas.upenn.edu The Future of CPS We established the Penn Research
Together or Alone: Detecting Group Mobility with Wireless Fingerprints
 Together or Alone: Detecting Group Mobility with Wireless Fingerprints Gürkan SOLMAZ and Fang-Jing WU NEC Laboratories Europe, CSST group, Heidelberg, Germany 24 May 2017 This work has received funding
Together or Alone: Detecting Group Mobility with Wireless Fingerprints Gürkan SOLMAZ and Fang-Jing WU NEC Laboratories Europe, CSST group, Heidelberg, Germany 24 May 2017 This work has received funding
Foreword_. Smart Santander Foreword
 Smart Santander_ 00 - Foreword Foreword_ More than half of the world s population lives in cities and this proportion is increasing day by day. As urban environments are becoming more densely populated
Smart Santander_ 00 - Foreword Foreword_ More than half of the world s population lives in cities and this proportion is increasing day by day. As urban environments are becoming more densely populated
ROV Deployable Dynamic Curvature Sensor to Monitor Fatigue in Subsea Pipelines
 ROV Deployable Dynamic Curvature Sensor to Monitor Fatigue in Subsea Pipelines December 1 st 2016 Subsea Asia 2016 Agenda Introducing the Dynamic Curvature Sensor INTEGRIstick Lessons Learned from not
ROV Deployable Dynamic Curvature Sensor to Monitor Fatigue in Subsea Pipelines December 1 st 2016 Subsea Asia 2016 Agenda Introducing the Dynamic Curvature Sensor INTEGRIstick Lessons Learned from not
BONUS EEIG- (Article 185, ex.169) the Joint Baltic Sea Research and Development Programme
 the Joint Baltic Sea Research and Development Programme") BONUS EEIG- (Article 185, ex.169) the Joint Baltic Sea Research and Development Programme MedSpring workshop, Beirut, 11/12.07.2013 Dr. Ulrich Wolf, PtJ-MGS National BONUS Contact Point for Germany 8 EU
BONUS EEIG- (Article 185, ex.169) the Joint Baltic Sea Research and Development Programme MedSpring workshop, Beirut, 11/12.07.2013 Dr. Ulrich Wolf, PtJ-MGS National BONUS Contact Point for Germany 8 EU
Digital Manufacturing
 Digital Manufacturing High Value Manufacturing Catapult / MTC point of view Harald Egner EU & Research Partnership Manager Nottingham, 30 th November HVM Catapult - History HVM Catapult 7 World class centres
Digital Manufacturing High Value Manufacturing Catapult / MTC point of view Harald Egner EU & Research Partnership Manager Nottingham, 30 th November HVM Catapult - History HVM Catapult 7 World class centres
第 XVII 部 災害時における情報通信基盤の開発
 XVII W I D E P R O J E C T 17 1 LifeLine Station (LLS) WG LifeLine Station (LLS) WG was launched in 2008 aiming for designing and developing an architecture of an information package for post-disaster
XVII W I D E P R O J E C T 17 1 LifeLine Station (LLS) WG LifeLine Station (LLS) WG was launched in 2008 aiming for designing and developing an architecture of an information package for post-disaster
Space in the next MFF Commision proposals
 Space in the next MFF Commision proposals EPIC Workshop London, 15-17 Ocotber 2018 Apostolia Karamali Deputy Head of Unit Space Policy and Research European Commission European Space Policy context 2 A
Space in the next MFF Commision proposals EPIC Workshop London, 15-17 Ocotber 2018 Apostolia Karamali Deputy Head of Unit Space Policy and Research European Commission European Space Policy context 2 A
Activating Intelligence Smart cities and smart agriculture
 Activating Intelligence Smart cities and smart agriculture Industry and smart city experts from around the world gathered at HUAWEI CONNECT 2018 to explore how artificial intelligence (AI) is being harnessed
Activating Intelligence Smart cities and smart agriculture Industry and smart city experts from around the world gathered at HUAWEI CONNECT 2018 to explore how artificial intelligence (AI) is being harnessed
Banning Garrett, PhD
 TEAGASC Technology Foresight 2035 Dublin, Ireland 8 March 2016 Banning Garrett, PhD Adjunct Faculty, Singularity University Senior Fellow, Global Federation of Competitiveness Councils Chief Strategy Officer,
TEAGASC Technology Foresight 2035 Dublin, Ireland 8 March 2016 Banning Garrett, PhD Adjunct Faculty, Singularity University Senior Fellow, Global Federation of Competitiveness Councils Chief Strategy Officer,
Galileo and the future of SatNav: monitoring the market and technology opportunities
 Galileo and the future of SatNav: monitoring the market and technology opportunities Alberto Fernández Wyttenbach, Market Innovation Officer ESA Space Moves! 18 th September 2017, Berlin GSA governance
Galileo and the future of SatNav: monitoring the market and technology opportunities Alberto Fernández Wyttenbach, Market Innovation Officer ESA Space Moves! 18 th September 2017, Berlin GSA governance
Shuhua Liu Senior Research Fellow, Docent Arcada Universitty of Applied Sciences. KaTuMetro Kickoff Seminar, University of Helsinki
 Intelligent Methods and Models for Mining Community Knowledge: Enabling enriched Understanding of Urban Development in Helsinki Metropolitan Region with Social Intelligence Shuhua Liu Senior Research Fellow,
Intelligent Methods and Models for Mining Community Knowledge: Enabling enriched Understanding of Urban Development in Helsinki Metropolitan Region with Social Intelligence Shuhua Liu Senior Research Fellow,
SETAC Conference May 17th, Rome Challenges, methodological developments and practical solutions for Social LCA in industry and policy
 SETAC Conference May 17th, 2018 - Rome Challenges, methodological developments and practical solutions for Social LCA in industry and policy RRI and the PRISMA PROJECT PILOTING RESPONSIBLE RESEARCH AND
SETAC Conference May 17th, 2018 - Rome Challenges, methodological developments and practical solutions for Social LCA in industry and policy RRI and the PRISMA PROJECT PILOTING RESPONSIBLE RESEARCH AND
Workshop on Intelligent System and Applications (ISA 17)
") Telemetry Mining for Space System Sara Abdelghafar Ahmed PhD student, Al-Azhar University Member of SRGE Workshop on Intelligent System and Applications (ISA 17) 13 May 2017 Workshop on Intelligent System
Telemetry Mining for Space System Sara Abdelghafar Ahmed PhD student, Al-Azhar University Member of SRGE Workshop on Intelligent System and Applications (ISA 17) 13 May 2017 Workshop on Intelligent System
VALERI - A COLLABORATIVE MOBILE MANIPULATOR FOR AEROSPACE PRODUCTION. CLAWAR 2016, London, UK Fraunhofer IFF Robotersysteme
 VALERI - A COLLABORATIVE MOBILE MANIPULATOR FOR AEROSPACE PRODUCTION CLAWAR 2016, London, UK Fraunhofer IFF Robotersysteme Fraunhofer IFF, Magdeburg 2016 VALERI - A collaborative mobile manipulator for
VALERI - A COLLABORATIVE MOBILE MANIPULATOR FOR AEROSPACE PRODUCTION CLAWAR 2016, London, UK Fraunhofer IFF Robotersysteme Fraunhofer IFF, Magdeburg 2016 VALERI - A collaborative mobile manipulator for
Development of a GPS-Based Autonomous Water Pollution Monitoring System Using Fish Robots
 6th WSEAS Int. Conference on Computational Intelligence, Man-Machine Systems and Cybernetics, Tenerife, Spain, December 14-16, 2007 156 Development of a GPS-Based Autonomous Water Pollution Monitoring
6th WSEAS Int. Conference on Computational Intelligence, Man-Machine Systems and Cybernetics, Tenerife, Spain, December 14-16, 2007 156 Development of a GPS-Based Autonomous Water Pollution Monitoring
Towards EU-US Collaboration on the Internet of Things (IoT) & Cyber-physical Systems (CPS)
 & Cyber-physical Systems (CPS)") Towards EU-US Collaboration on the Internet of Things (IoT) & Cyber-physical Systems (CPS) Christian Sonntag Senior Researcher & Project Manager, TU Dortmund, Germany ICT Policy, Research and Innovation
Towards EU-US Collaboration on the Internet of Things (IoT) & Cyber-physical Systems (CPS) Christian Sonntag Senior Researcher & Project Manager, TU Dortmund, Germany ICT Policy, Research and Innovation
Horizon Europe structure and budget allocation Helen Fairclough UK National Contact Point
 Horizon Europe structure and budget allocation Helen Fairclough UK National Contact Point This project has received funding from the European Union s Horizon 2020 research and innovation programme under
Horizon Europe structure and budget allocation Helen Fairclough UK National Contact Point This project has received funding from the European Union s Horizon 2020 research and innovation programme under
ARCHITECTURE AND MODEL OF DATA INTEGRATION BETWEEN MANAGEMENT SYSTEMS AND AGRICULTURAL MACHINES FOR PRECISION AGRICULTURE
 ARCHITECTURE AND MODEL OF DATA INTEGRATION BETWEEN MANAGEMENT SYSTEMS AND AGRICULTURAL MACHINES FOR PRECISION AGRICULTURE W. C. Lopes, R. R. D. Pereira, M. L. Tronco, A. J. V. Porto NepAS [Center for Teaching
ARCHITECTURE AND MODEL OF DATA INTEGRATION BETWEEN MANAGEMENT SYSTEMS AND AGRICULTURAL MACHINES FOR PRECISION AGRICULTURE W. C. Lopes, R. R. D. Pereira, M. L. Tronco, A. J. V. Porto NepAS [Center for Teaching
SONOBOT AUTONOMOUS HYDROGRAPHIC SURVEY VEHICLE PRODUCT INFORMATION GUIDE
 SONOBOT AUTONOMOUS HYDROGRAPHIC SURVEY VEHICLE PRODUCT INFORMATION GUIDE EvoLogics Sonobot an autonomous unmanned surface vehicle for hydrographic surveys High Precision Differential GPS for high-accuracy
SONOBOT AUTONOMOUS HYDROGRAPHIC SURVEY VEHICLE PRODUCT INFORMATION GUIDE EvoLogics Sonobot an autonomous unmanned surface vehicle for hydrographic surveys High Precision Differential GPS for high-accuracy
Dynamics and Operations of an Orbiting Satellite Simulation. Requirements Specification 13 May 2009
 Dynamics and Operations of an Orbiting Satellite Simulation Requirements Specification 13 May 2009 Christopher Douglas, Karl Nielsen, and Robert Still Sponsor / Faculty Advisor: Dr. Scott Trimboli ECE
Dynamics and Operations of an Orbiting Satellite Simulation Requirements Specification 13 May 2009 Christopher Douglas, Karl Nielsen, and Robert Still Sponsor / Faculty Advisor: Dr. Scott Trimboli ECE
GamECAR JULY ULY Meetings. 5 Toward the future. 5 Consortium. E Stay updated
 NEWSLETTER 1 ULY 2017 JULY The project engine has started and there is a long way to go, but we aim at consuming as less gas as possible! It will be a game, but a serious one. Playing it for real, while
NEWSLETTER 1 ULY 2017 JULY The project engine has started and there is a long way to go, but we aim at consuming as less gas as possible! It will be a game, but a serious one. Playing it for real, while
Accessible Power Tool Flexible Application Scalable Solution
 Accessible Power Tool Flexible Application Scalable Solution Franka Emika GmbH Our vision of a robot for everyone sensitive, interconnected, adaptive and cost-efficient. Even today, robotics remains a
Accessible Power Tool Flexible Application Scalable Solution Franka Emika GmbH Our vision of a robot for everyone sensitive, interconnected, adaptive and cost-efficient. Even today, robotics remains a
Neural Networks The New Moore s Law
 Neural Networks The New Moore s Law Chris Rowen, PhD, FIEEE CEO Cognite Ventures December 216 Outline Moore s Law Revisited: Efficiency Drives Productivity Embedded Neural Network Product Segments Efficiency
Neural Networks The New Moore s Law Chris Rowen, PhD, FIEEE CEO Cognite Ventures December 216 Outline Moore s Law Revisited: Efficiency Drives Productivity Embedded Neural Network Product Segments Efficiency
THE METHODOLOGY: STATUS AND OBJECTIVES THE PILOT PROJECT B
 Contents The methodology: status and objectives 3 The pilot project B 3 Definition of the overall matrix 4 The starting phases: setting up the framework for the pilot project 4 1) Constitution of the local
Contents The methodology: status and objectives 3 The pilot project B 3 Definition of the overall matrix 4 The starting phases: setting up the framework for the pilot project 4 1) Constitution of the local
Joint Programming Initiative Healthy and Productive Seas and Oceans
 Joint Programming Initiative Healthy and Productive Seas and Oceans About JPI Oceans An intergovernmental platform for long-term collaboration, increasing the impact of our investments in marine and maritime
Joint Programming Initiative Healthy and Productive Seas and Oceans About JPI Oceans An intergovernmental platform for long-term collaboration, increasing the impact of our investments in marine and maritime
Jager UAVs to Locate GPS Interference
 JIFX 16-1 2-6 November 2015 Camp Roberts, CA Jager UAVs to Locate GPS Interference Stanford GPS Research Laboratory and the Stanford Intelligent Systems Lab Principal Investigator: Sherman Lo, PhD Area
JIFX 16-1 2-6 November 2015 Camp Roberts, CA Jager UAVs to Locate GPS Interference Stanford GPS Research Laboratory and the Stanford Intelligent Systems Lab Principal Investigator: Sherman Lo, PhD Area
Digital transformation in the Catalan public administrations
 Digital transformation in the Catalan public administrations Joan Ramon Marsal, Coordinator of the National Agreement for the Digital Society egovernment Working Group. Government of Catalonia Josep Lluís
Digital transformation in the Catalan public administrations Joan Ramon Marsal, Coordinator of the National Agreement for the Digital Society egovernment Working Group. Government of Catalonia Josep Lluís
Digital Applications for Smart / Intelligent Cities
 Digital Applications for Smart / Intelligent Cities Contents URENIO RESEARCH AT THE ARISTOTLE UNIVERSITY OF THESSALONIKI AND INTELSPACE S.A. An integrated portfolio of applications for smart cities...
Digital Applications for Smart / Intelligent Cities Contents URENIO RESEARCH AT THE ARISTOTLE UNIVERSITY OF THESSALONIKI AND INTELSPACE S.A. An integrated portfolio of applications for smart cities...
Robot Assisted Emergency Search and Rescue System with Wireless Sensors
 Robot Assisted Emergency Search and Rescue System with Wireless Sensors J. Karthiyayini Senior Assistant Professor, Dept of ISE, New Horizon College of Engineering, Bangalore, Karnataka, India Abstract-The
Robot Assisted Emergency Search and Rescue System with Wireless Sensors J. Karthiyayini Senior Assistant Professor, Dept of ISE, New Horizon College of Engineering, Bangalore, Karnataka, India Abstract-The
An IoT Based Real-Time Environmental Monitoring System Using Arduino and Cloud Service
 Engineering, Technology & Applied Science Research Vol. 8, No. 4, 2018, 3238-3242 3238 An IoT Based Real-Time Environmental Monitoring System Using Arduino and Cloud Service Saima Zafar Emerging Sciences,
Engineering, Technology & Applied Science Research Vol. 8, No. 4, 2018, 3238-3242 3238 An IoT Based Real-Time Environmental Monitoring System Using Arduino and Cloud Service Saima Zafar Emerging Sciences,
CAPACITIES FOR TECHNOLOGY TRANSFER
 CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
TAPAS - Testbed in Aarhus for Precision positioning and Autonomous Systems
 TAPAS - Testbed in Aarhus for Precision positioning and Autonomous Systems 1. TAPAS - Vision and perspectives 2. TAPAS Alpha General description 3. TAPAS Beta Future initiatives. Per Lundahl Thomsen, TAPAS
TAPAS - Testbed in Aarhus for Precision positioning and Autonomous Systems 1. TAPAS - Vision and perspectives 2. TAPAS Alpha General description 3. TAPAS Beta Future initiatives. Per Lundahl Thomsen, TAPAS
Invitation to Participate
 Invitation to Participate JOIN US IN THE UNLIMITED RESILIENT DIGITAL CONNECTIVITY Invitation to Participate The Global Space Economy is worth more than $400 billion and set to grow dramatically. The SmartSat
Invitation to Participate JOIN US IN THE UNLIMITED RESILIENT DIGITAL CONNECTIVITY Invitation to Participate The Global Space Economy is worth more than $400 billion and set to grow dramatically. The SmartSat
Meet Boston dynamics' LS3 - the latest robotic war machine
 University of Wollongong Research Online Faculty of Engineering and Information Sciences - Papers: Part A Faculty of Engineering and Information Sciences 2012 Meet Boston dynamics' LS3 - the latest robotic
University of Wollongong Research Online Faculty of Engineering and Information Sciences - Papers: Part A Faculty of Engineering and Information Sciences 2012 Meet Boston dynamics' LS3 - the latest robotic
Flowcharts and Programs
 Flowcharts and Programs Engineering with Labview Laptop Program Schematic Editor Front Panel & Block Diagram Block Diagram: Program Code Front Panel: Virtual Dashboard Front Panel Block Diagram
Flowcharts and Programs Engineering with Labview Laptop Program Schematic Editor Front Panel & Block Diagram Block Diagram: Program Code Front Panel: Virtual Dashboard Front Panel Block Diagram
Robotic Technology for Port and Maritime Automation
 Industrial/Service Robots Field Robots Robotic Technology for Port and Maritime Automation Presenter: Assoc Prof Chen I-Ming Director, Robotics Research Center & Intelligent Systems Center School of Mechanical
Industrial/Service Robots Field Robots Robotic Technology for Port and Maritime Automation Presenter: Assoc Prof Chen I-Ming Director, Robotics Research Center & Intelligent Systems Center School of Mechanical
TECHNOLOGY DEVELOPMENT AREAS IN AAWA
 TECHNOLOGY DEVELOPMENT AREAS IN AAWA Technologies for realizing remote and autonomous ships exist. The task is to find the optimum way to combine them reliably and cost effecticely. Ship state definition
TECHNOLOGY DEVELOPMENT AREAS IN AAWA Technologies for realizing remote and autonomous ships exist. The task is to find the optimum way to combine them reliably and cost effecticely. Ship state definition
Report on Cyber-Physical Systems (CPS) Roadmapping Workshop
 Roadmapping Workshop") Report on Cyber-Physical Systems (CPS) Roadmapping Workshop Deployment CPS and IoT Technologies to support Digital Transformation on the 20 th of June 2018 at the 23 rd ICE/IEEE ITM Conference, Stuttgart,
Report on Cyber-Physical Systems (CPS) Roadmapping Workshop Deployment CPS and IoT Technologies to support Digital Transformation on the 20 th of June 2018 at the 23 rd ICE/IEEE ITM Conference, Stuttgart,
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics studies robots For history and definitions see the 2013 slides http://www.ladispe.polito.it/corsi/meccatronica/01peeqw/2014-15/slides/robotics_2013_01_a_brief_history.pdf
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics studies robots For history and definitions see the 2013 slides http://www.ladispe.polito.it/corsi/meccatronica/01peeqw/2014-15/slides/robotics_2013_01_a_brief_history.pdf
2013 Annual Report on Radiofrequency Electromagnetic Field Exposure Levels in Catalonia
 2013 Annual Report on Radiofrequency Electromagnetic Field Exposure Levels in Catalonia February 2014 1. Introduction 2. Government of Catalonia: actions undertaken 2.1. Radio-electric Governance 3. Regulations
2013 Annual Report on Radiofrequency Electromagnetic Field Exposure Levels in Catalonia February 2014 1. Introduction 2. Government of Catalonia: actions undertaken 2.1. Radio-electric Governance 3. Regulations