AUTONOMOUS UNDERWATER VEHICLE Introductory Session. January 07, 2017 IITK
|
|
|
- Jayson Copeland
- 5 years ago
- Views:
Transcription
1 AUTONOMOUS UNDERWATER VEHICLE Introductory Session January 07, 2017 IITK




2 Purpose of an AUV Pluto Plus AUV Remus AUV Battlespace Preparation AUV Cornell AUV: Gemini COMMERCIAL Maps of Seafloor Building subsea infrastructure Detecting underwater mines RESEARCH Studying marine life Measuring properties like concentration of elements in ocean floor DEFENSE Upcoming interest in navy forces Finding wreckages of crashed airplanes HOBBY For robotics enthusiasts Participating in competitions held annually

3 OUR OBJECTIVE To promote robotics, especially underwater robotics as an educational interest. To provide facility to interested students and faculties for conducting amateur research and educational experiments in underwater robotics. To represent the institute at national and international level competitions held annually, and exhibit the caliber and prestige that the institute carries.
 Organizer: NIOT,")



 Date: Last week of")
4 COMPETITIVE EVENTS Student Autonomous underwater Vehicle (SAVe) Organizer: NIOT, Chennai under Ministry of Earth Science Date: October, 2017 Venue: NIOT, Chennai Singapore AUV Challenge Organizer: IEEE & OES Date: March, 2018 Venue: Singapore Polytechnic, Singapore International RoboSub Competition Organizer: AUVSI Foundation (Co-sponsored by U.S. Office of Naval Research) Date: Last week of July, 2018 Venue: SSC Pacific TRANSDEC, San Diego, CA

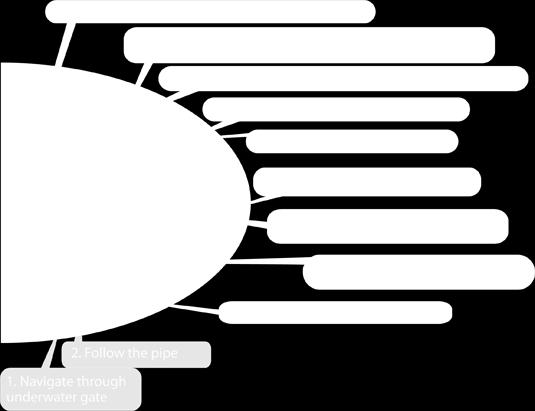
5 TASKS IN THE GAME ARENA






6 PARTICIPATING TEAMS FROM INDIA IITK



7 MAJOR INTERNATIONAL PARTICIPANTS IITK


8 OUR HISTORY PROTOTYPE I PROTOTYPE II
9 MECHANICAL





10 Robot Designing Used for designing the robot before fabrication to ensure that everything is picture perfect 3-D view of the robot Orthographic and isometric views of parts Selecting the material required




11 Design Analysis Used for analyzing the design for optimizing it s performance in terms of: Coefficient of Drag Vehicle Speed Centre of Mass Weight Center of Buoyancy

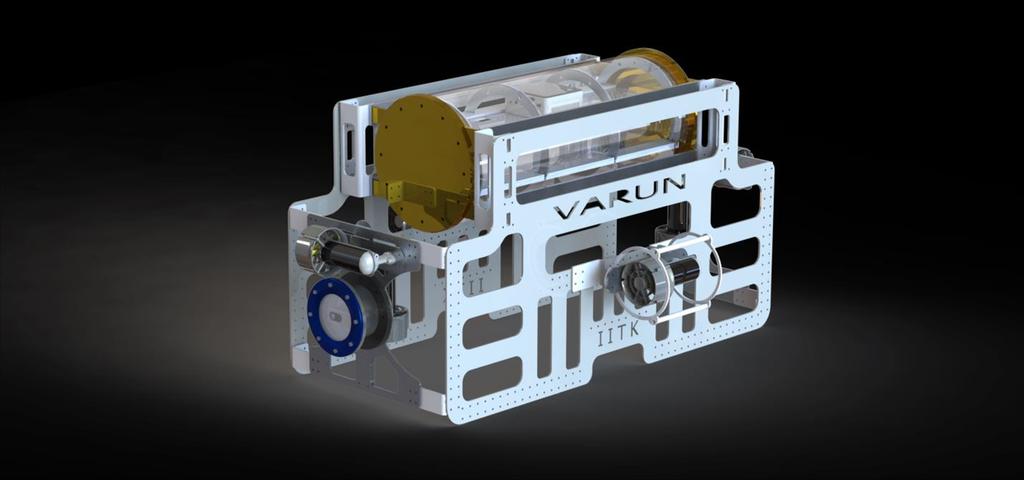
12 Varun s Design Specification Name: Varun Degree of Freedom: 5 Number of thrusters: 6 Weight: kg Buoyancy: +1% Dimensions (in mm): 1081*434*530



13 Custom- Made Waterproof Casings Manufactured using in-house facilities available at Tinkering Lab and 4-i Laboratory under Mechatronics Lab Front Camera Casing Hull Cap with Connectors Main Pressure Hull

14 Pneumatic System For grabbing and dropping manipulator For torpedo shooting For marker dropping Pneumatic Circuit Electrical Circuit Testing of marker dropper assembly
15 ELECTRICAL

16 Battery Management System Divide the batteries into two power lines Measure Voltage and Current in both the lines to calculate Power consumption of the Vehicle Protect the components from damage due to overcurrent and reverse polarity Protect the batteries from over discharge.




17 Arduino Single board microcontroller Open-source electronics platform created by Strong Friend in Ivrea, Italy Coding done using programming languages like C, C++, Java Experiment using Arduino Uno Arduino IDE


18 Intel NUC: Processor Integrate Intel s Next Unit of Computing (NUC), a compact computer, into the Vehicle. Power the NUC using the existing 11.1 V LiPo batteries via a boost converter. Output stabilised using capacitors. Isolate the power lines of NUC and other peripherals of the processor from remaining circuit like actuators, sensors.



19 Previous Processors Odroid U3 Micro-processor 1.7 GHz Quad Core Processor 2 GB RAM Supports Ubuntu (14.04 LTS) Odroid X2 Raspberry Pi2


20 Sensors and Systems Currently sensors being used: Pressure Sensor Camera IMU Future Additions: Water Detection Unit Acoustic localization system Doppler Velocity Log
21 SOFTWARE


22 Vision Logitech C270 Logitech C270


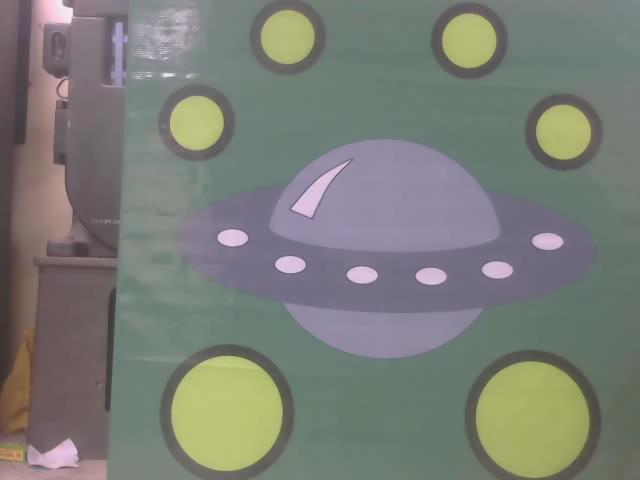
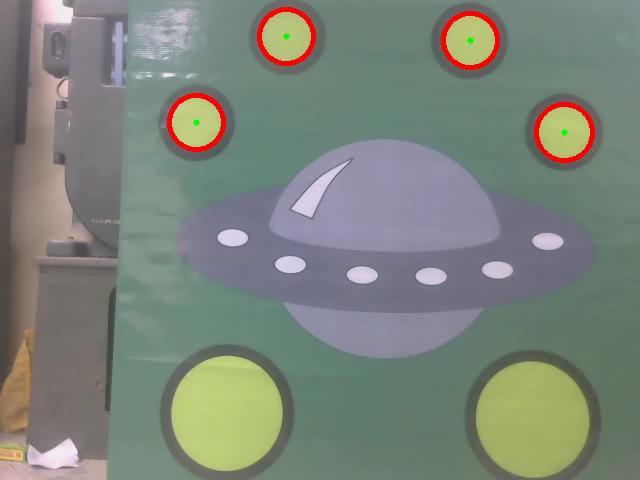


23 Samples Line Detection Circle Detection Buoy Detection
 to a file,")
24 ROBOT OPERATING SYSTEM Flexible framework for writing robot software Collection of tools, libraries, and conventions that aim to simplify the task of creating complex and robust robot behavior. Has built-in messaging system that manages details of communication between distributed nodes via anonymous publish/subscribe mechanism Easier to capture data published by some task (node) to a file, and then republish that data from the file at a later time.
 We")

25 Graphical User Interface(GUI) We use this GUI for testing our Bot s Motion.


26 Actually testing our code rather than praying that it'll work! IITK

27 Tasks Task_gate Task_line line_detection line_centralize Line_align Task_buoy Task_torpedo Task_octagon
28 BUSINESS

29 Face of the Team Represent team in various exhibitions and conferences held across the country Ensures interests of campus community and professors Opportunity to connect with industrial professionals and experts Publishes papers and newsletters for the team


30 Marketing and Sponsorships Establish tie-ups of the team with various goods and services providing companies Learn marketing strategies through market analysis along with understanding methods of influencing companies and alumni to fund the project Learn how to advertise and brand the team Sponsorships required to purchase better sensors and have availability of better services to build the robot Example: A new sensor we want to purchase called Doppler Velocity Log is worth INR 13 lakhs! Doppler Velocity Log CNC Milling


31 Online Footprint and Graphic Designing IITK
32 Expectations from the Team Members in each sub-systems would further be given projects relevant to a particular topic/ product idea in groups of 2-3 There would be strict deadlines to the work assigned and any form of negligence may lead to unpleasant consequences Past experience: People don t work from their room a lot, so on an average estimate around hours per week as time spent together doing work together Documentation of work is important and would be done after completion of each project Since next competition is in less than a year, every member of the team have to stay in the mid-sem breaks and summer vacations (exceptions only in case of valid reasons) Leaving in-between from the team would lead to no recognition of your work Free to join other activities, however, if any form of slackness observed and if team is being affected by that, you won t be allowed to further work on this project


33 Any IITK Questions? For more information, visit: auviitk.com, or contact: Mayank Mittal Shibhansh Dohare
INTRODUCTION TO ROBOTICS
 INTRODUCTION TO ROBOTICS ROBOTICS CLUB SCIENCE AND TECHNOLOGY COUNCIL, IIT-KANPUR AUGUST 6 TH, 2016 OUTLINE What is a robot? Classifications of Robots What goes behind making a robot? Mechanical Electrical
INTRODUCTION TO ROBOTICS ROBOTICS CLUB SCIENCE AND TECHNOLOGY COUNCIL, IIT-KANPUR AUGUST 6 TH, 2016 OUTLINE What is a robot? Classifications of Robots What goes behind making a robot? Mechanical Electrical
Low cost underwater exploration vehicle
 PROJECT N 36 Low cost underwater exploration vehicle David O Brien-Møller European School Brussels III Boulevard du Triomphe 135, 1050 Ixelles, Belgique S6 ENA Abstract Key words: Under Water robot, independent
PROJECT N 36 Low cost underwater exploration vehicle David O Brien-Møller European School Brussels III Boulevard du Triomphe 135, 1050 Ixelles, Belgique S6 ENA Abstract Key words: Under Water robot, independent
A Shallow Water Acoustic Network for Mine Countermeasures Operations with Autonomous Underwater Vehicles
 A Shallow Water Acoustic Network for Mine Countermeasures Operations with Autonomous Underwater Vehicles Lee Freitag, Matthew Grund, Chris von Alt, Roger Stokey and Thomas Austin Woods Hole Oceanographic
A Shallow Water Acoustic Network for Mine Countermeasures Operations with Autonomous Underwater Vehicles Lee Freitag, Matthew Grund, Chris von Alt, Roger Stokey and Thomas Austin Woods Hole Oceanographic
TEAM AERO-I TEAM AERO-I JOURNAL PAPER DELHI TECHNOLOGICAL UNIVERSITY Journal paper for IARC 2014
 TEAM AERO-I TEAM AERO-I JOURNAL PAPER DELHI TECHNOLOGICAL UNIVERSITY DELHI TECHNOLOGICAL UNIVERSITY Journal paper for IARC 2014 2014 IARC ABSTRACT The paper gives prominence to the technical details of
TEAM AERO-I TEAM AERO-I JOURNAL PAPER DELHI TECHNOLOGICAL UNIVERSITY DELHI TECHNOLOGICAL UNIVERSITY Journal paper for IARC 2014 2014 IARC ABSTRACT The paper gives prominence to the technical details of
Team S.S. Minnow RoboBoat 2015
 1 Team RoboBoat 2015 Abigail Butka Daytona Beach Homeschoolers Palm Coast Florida USA butkaabby872@gmail.com Nick Serle Daytona Beach Homeschoolers Flagler Beach, Florida USA Abstract This document describes
1 Team RoboBoat 2015 Abigail Butka Daytona Beach Homeschoolers Palm Coast Florida USA butkaabby872@gmail.com Nick Serle Daytona Beach Homeschoolers Flagler Beach, Florida USA Abstract This document describes
ROBOSUB. Isaac Peral y Caballero. Future Vehicles. Entrepreneurs
 ROBOSUB Isaac Peral y Caballero FuVe and FUVE association borns from the desire of innovation and entrepreneurship. Formed by 20 students from different universities and specialties we will work to develop
ROBOSUB Isaac Peral y Caballero FuVe and FUVE association borns from the desire of innovation and entrepreneurship. Formed by 20 students from different universities and specialties we will work to develop
Developing a Computer Vision System for Autonomous Rover Navigation
 University of Hawaii at Hilo Fall 2016 Developing a Computer Vision System for Autonomous Rover Navigation ASTR 432 FINAL REPORT FALL 2016 DARYL ALBANO Page 1 of 6 Table of Contents Abstract... 2 Introduction...
University of Hawaii at Hilo Fall 2016 Developing a Computer Vision System for Autonomous Rover Navigation ASTR 432 FINAL REPORT FALL 2016 DARYL ALBANO Page 1 of 6 Table of Contents Abstract... 2 Introduction...
Teleoperated Robot Controlling Interface: an Internet of Things Based Approach
 Proc. 1 st International Conference on Machine Learning and Data Engineering (icmlde2017) 20-22 Nov 2017, Sydney, Australia ISBN: 978-0-6480147-3-7 Teleoperated Robot Controlling Interface: an Internet
Proc. 1 st International Conference on Machine Learning and Data Engineering (icmlde2017) 20-22 Nov 2017, Sydney, Australia ISBN: 978-0-6480147-3-7 Teleoperated Robot Controlling Interface: an Internet
DESIGN AND CAPABILITIES OF AN ENHANCED NAVAL MINE WARFARE SIMULATION FRAMEWORK. Timothy E. Floore George H. Gilman
 Proceedings of the 2011 Winter Simulation Conference S. Jain, R.R. Creasey, J. Himmelspach, K.P. White, and M. Fu, eds. DESIGN AND CAPABILITIES OF AN ENHANCED NAVAL MINE WARFARE SIMULATION FRAMEWORK Timothy
Proceedings of the 2011 Winter Simulation Conference S. Jain, R.R. Creasey, J. Himmelspach, K.P. White, and M. Fu, eds. DESIGN AND CAPABILITIES OF AN ENHANCED NAVAL MINE WARFARE SIMULATION FRAMEWORK Timothy
IIT PATNA PLACEMENT BROCHURE M.TECH MECHATRONICS
 IIT PATNA PLACEMENT BROCHURE 2017-2018 M.TECH MECHATRONICS CONTENTS 1. About Us 2. Course curriculum 3. Laboratory facilities 4. Student Profile 5. Research and Innovation 6. Workshops and Student activities
IIT PATNA PLACEMENT BROCHURE 2017-2018 M.TECH MECHATRONICS CONTENTS 1. About Us 2. Course curriculum 3. Laboratory facilities 4. Student Profile 5. Research and Innovation 6. Workshops and Student activities
in association with SnT Council Student Gymkhana IIT Kanpur
 Tinkering Laboratory@IITK by Sameer Khandekar in association with SnT Council Student Gymkhana IIT Kanpur What is Tinkering? Informal: A mischievous child: little tinkers, we were Attempt to repair/improve
Tinkering Laboratory@IITK by Sameer Khandekar in association with SnT Council Student Gymkhana IIT Kanpur What is Tinkering? Informal: A mischievous child: little tinkers, we were Attempt to repair/improve
Applications. > > Oil & Gas. > > RoVs and auvs. > > Oceanography. > > Monitoring stations. > > Seismic. > > Networks and relay chains
 Underwater acoustic Modems EvoLogics S2CR - series underwater acoustic modems provide full-duplex digital communication delivering an excellent performance, resistant to the challenges of the dynamic subsea
Underwater acoustic Modems EvoLogics S2CR - series underwater acoustic modems provide full-duplex digital communication delivering an excellent performance, resistant to the challenges of the dynamic subsea
Multisensory Based Manipulation Architecture
 Marine Robot and Dexterous Manipulatin for Enabling Multipurpose Intevention Missions WP7 Multisensory Based Manipulation Architecture GIRONA 2012 Y2 Review Meeting Pedro J Sanz IRS Lab http://www.irs.uji.es/
Marine Robot and Dexterous Manipulatin for Enabling Multipurpose Intevention Missions WP7 Multisensory Based Manipulation Architecture GIRONA 2012 Y2 Review Meeting Pedro J Sanz IRS Lab http://www.irs.uji.es/
Multidisciplinary Development of an Autonomous Underwater Vehicle: Navigation & Spatial Awareness
 Multidisciplinary Development of an Autonomous Underwater Vehicle: Navigation & Spatial Awareness Francisco Pastrana, Zakaria Daud, Michael Hix & Jonathan Jaworski, Embry Riddle Aeronautical University
Multidisciplinary Development of an Autonomous Underwater Vehicle: Navigation & Spatial Awareness Francisco Pastrana, Zakaria Daud, Michael Hix & Jonathan Jaworski, Embry Riddle Aeronautical University
Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators
 Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators Ahmed Okasha, Assistant Lecturer okasha1st@gmail.com Objective Have a
Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators Ahmed Okasha, Assistant Lecturer okasha1st@gmail.com Objective Have a
Semi-Autonomous Parking for Enhanced Safety and Efficiency
 Technical Report 105 Semi-Autonomous Parking for Enhanced Safety and Efficiency Sriram Vishwanath WNCG June 2017 Data-Supported Transportation Operations & Planning Center (D-STOP) A Tier 1 USDOT University
Technical Report 105 Semi-Autonomous Parking for Enhanced Safety and Efficiency Sriram Vishwanath WNCG June 2017 Data-Supported Transportation Operations & Planning Center (D-STOP) A Tier 1 USDOT University
Cooperative localization (part I) Jouni Rantakokko
 Jouni Rantakokko") Cooperative localization (part I) Jouni Rantakokko Cooperative applications / approaches Wireless sensor networks Robotics Pedestrian localization First responders Localization sensors - Small, low-cost
Cooperative localization (part I) Jouni Rantakokko Cooperative applications / approaches Wireless sensor networks Robotics Pedestrian localization First responders Localization sensors - Small, low-cost
Partnering: Labs and Small Businesses
 Partnering: Labs and Small Businesses NATIONAL SBIR/STTR FALL CONFERENCE Nov 13, 2014 Alex Athey, Ph.D. Applied Research Laboratories The University of Texas at Austin alex.athey@arlut.utexas.edu 512-777-1616
Partnering: Labs and Small Businesses NATIONAL SBIR/STTR FALL CONFERENCE Nov 13, 2014 Alex Athey, Ph.D. Applied Research Laboratories The University of Texas at Austin alex.athey@arlut.utexas.edu 512-777-1616
Cooperative navigation (part II)
") Cooperative navigation (part II) An example using foot-mounted INS and UWB-transceivers Jouni Rantakokko Aim Increased accuracy during long-term operations in GNSS-challenged environments for - First responders
Cooperative navigation (part II) An example using foot-mounted INS and UWB-transceivers Jouni Rantakokko Aim Increased accuracy during long-term operations in GNSS-challenged environments for - First responders
MECHATRONICS IN A BOX
 MECHATRONICS IN A BOX A Complete Mechatronics Solution for the Classroom amtekcompany.com Contents Introduction Programming Arduino microcontrollers Motor Control Training Course Flowcode 8 Formula AllCode
MECHATRONICS IN A BOX A Complete Mechatronics Solution for the Classroom amtekcompany.com Contents Introduction Programming Arduino microcontrollers Motor Control Training Course Flowcode 8 Formula AllCode
Engtek SubSea Systems
 Engtek SubSea Systems A Division of Engtek Manoeuvra Systems Pte Ltd SubSea Propulsion Technology AUV Propulsion and Maneuvering Modules Engtek SubSea Systems A Division of Engtek Manoeuvra Systems Pte
Engtek SubSea Systems A Division of Engtek Manoeuvra Systems Pte Ltd SubSea Propulsion Technology AUV Propulsion and Maneuvering Modules Engtek SubSea Systems A Division of Engtek Manoeuvra Systems Pte
Intelligent Sensor Platforms for Remotely Piloted and Unmanned Vehicles. Dr. Nick Krouglicof 14 June 2012
 Intelligent Sensor Platforms for Remotely Piloted and Unmanned Vehicles Dr. Nick Krouglicof 14 June 2012 Project Overview Project Duration September 1, 2010 to June 30, 2016 Primary objective(s) / outcomes
Intelligent Sensor Platforms for Remotely Piloted and Unmanned Vehicles Dr. Nick Krouglicof 14 June 2012 Project Overview Project Duration September 1, 2010 to June 30, 2016 Primary objective(s) / outcomes
CMRE La Spezia, Italy
 Innovative Interoperable M&S within Extended Maritime Domain for Critical Infrastructure Protection and C-IED CMRE La Spezia, Italy Agostino G. Bruzzone 1,2, Alberto Tremori 1 1 NATO STO CMRE& 2 Genoa
Innovative Interoperable M&S within Extended Maritime Domain for Critical Infrastructure Protection and C-IED CMRE La Spezia, Italy Agostino G. Bruzzone 1,2, Alberto Tremori 1 1 NATO STO CMRE& 2 Genoa
Smart and Networking Underwater Robots in Cooperation Meshes
 Smart and Networking Underwater Robots in Cooperation Meshes SWARMs Newsletter #1 April 2016 Fostering offshore growth Many offshore industrial operations frequently involve divers in challenging and risky
Smart and Networking Underwater Robots in Cooperation Meshes SWARMs Newsletter #1 April 2016 Fostering offshore growth Many offshore industrial operations frequently involve divers in challenging and risky
UNIT 4 VOCABULARY SKILLS WORK FUNCTIONS QUIZ. A detailed explanation about Arduino. What is Arduino? Listening
 UNIT 4 VOCABULARY SKILLS WORK FUNCTIONS QUIZ 4.1 Lead-in activity Find the missing letters Reading A detailed explanation about Arduino. What is Arduino? Listening To acquire a basic knowledge about Arduino
UNIT 4 VOCABULARY SKILLS WORK FUNCTIONS QUIZ 4.1 Lead-in activity Find the missing letters Reading A detailed explanation about Arduino. What is Arduino? Listening To acquire a basic knowledge about Arduino
Pocket Passive SONAR
 Pocket Passive SONAR Jacob Easterling, Eric M. Schwartz Department of Electrical and Computer Engineering University of Florida 571 Gale Lemerand Drive Gainesville, Florida 32611 jeasterling@ufl.edu, ems@ufl.edu
Pocket Passive SONAR Jacob Easterling, Eric M. Schwartz Department of Electrical and Computer Engineering University of Florida 571 Gale Lemerand Drive Gainesville, Florida 32611 jeasterling@ufl.edu, ems@ufl.edu
THE ARDUINO ENGINEERING KIT INFORMATION GUIDE ARDUINO.CC/EDUCATION
 THE ARDUINO ENGINEERING KIT INFORMATION GUIDE ARDUINO.CC/EDUCATION Includes 1-year individual user license of: In collaboration with: INSPIRING TEACHING & EMPOWERING TABLE OF CONTENTS ARDUINO EDUCATION
THE ARDUINO ENGINEERING KIT INFORMATION GUIDE ARDUINO.CC/EDUCATION Includes 1-year individual user license of: In collaboration with: INSPIRING TEACHING & EMPOWERING TABLE OF CONTENTS ARDUINO EDUCATION
Wheeled Mobile Robot Kuzma I
 Contemporary Engineering Sciences, Vol. 7, 2014, no. 18, 895-899 HIKARI Ltd, www.m-hikari.com http://dx.doi.org/10.12988/ces.2014.47102 Wheeled Mobile Robot Kuzma I Andrey Sheka 1, 2 1) Department of Intelligent
Contemporary Engineering Sciences, Vol. 7, 2014, no. 18, 895-899 HIKARI Ltd, www.m-hikari.com http://dx.doi.org/10.12988/ces.2014.47102 Wheeled Mobile Robot Kuzma I Andrey Sheka 1, 2 1) Department of Intelligent
The Oil & Gas Industry Requirements for Marine Robots of the 21st century
 The Oil & Gas Industry Requirements for Marine Robots of the 21st century www.eninorge.no Laura Gallimberti 20.06.2014 1 Outline Introduction: fast technology growth Overview underwater vehicles development
The Oil & Gas Industry Requirements for Marine Robots of the 21st century www.eninorge.no Laura Gallimberti 20.06.2014 1 Outline Introduction: fast technology growth Overview underwater vehicles development
Indian Institute of Technology Patna M.Tech (Mechatronics) Placement Brochure
 Placement Brochure") Indian Institute of Technology Patna M.Tech (Mechatronics) Placement Brochure i 2016-17 CONTENTS 1 About Us 5 Research Activities 2 Course Structure 6 Sponsored Projects 3 Laboratory Facilities 7 Major
Indian Institute of Technology Patna M.Tech (Mechatronics) Placement Brochure i 2016-17 CONTENTS 1 About Us 5 Research Activities 2 Course Structure 6 Sponsored Projects 3 Laboratory Facilities 7 Major
RF module and Sensing Workshop Proposal. Tachlog Pvt. Ltd.
 RF module and Sensing Workshop Proposal Tachlog Pvt. Ltd. ABOUT THIS DOCUMENT Purpose of this The Workshop proposal document, explains the syllabus, estimate, activity document and overview of the workshop
RF module and Sensing Workshop Proposal Tachlog Pvt. Ltd. ABOUT THIS DOCUMENT Purpose of this The Workshop proposal document, explains the syllabus, estimate, activity document and overview of the workshop
Design and Control of a Self-Balancing Autonomous Underwater Vehicle with Vision and Detection Capabilities
 Journal of Marine Science: Research & Development Journal of Marine Science: Research & Development Jebelli et al., J Marine Sci Res Dev 2018, 8:1 DOI: 10.4172/2155-9910.1000245 Research Review Article
Journal of Marine Science: Research & Development Journal of Marine Science: Research & Development Jebelli et al., J Marine Sci Res Dev 2018, 8:1 DOI: 10.4172/2155-9910.1000245 Research Review Article
Challenging areas:- Hand gesture recognition is a growing very fast and it is I. INTRODUCTION
 Hand gesture recognition for vehicle control Bhagyashri B.Jakhade, Neha A. Kulkarni, Sadanand. Patil Abstract: - The rapid evolution in technology has made electronic gadgets inseparable part of our life.
Hand gesture recognition for vehicle control Bhagyashri B.Jakhade, Neha A. Kulkarni, Sadanand. Patil Abstract: - The rapid evolution in technology has made electronic gadgets inseparable part of our life.
Baset Adult-Size 2016 Team Description Paper
 Baset Adult-Size 2016 Team Description Paper Mojtaba Hosseini, Vahid Mohammadi, Farhad Jafari 2, Dr. Esfandiar Bamdad 1 1 Humanoid Robotic Laboratory, Robotic Center, Baset Pazhuh Tehran company. No383,
Baset Adult-Size 2016 Team Description Paper Mojtaba Hosseini, Vahid Mohammadi, Farhad Jafari 2, Dr. Esfandiar Bamdad 1 1 Humanoid Robotic Laboratory, Robotic Center, Baset Pazhuh Tehran company. No383,
The ARROWS Project: Underwater Robotic Systems for Archaeology
 The ARROWS Project: Underwater Robotic Systems for Archaeology Benedetto Allotta benedetto.allotta@unifi.it DIEF - Dept. of Industrial Engineering Florence MDM Lab Laboratory of Mechatronics and Dynamic
The ARROWS Project: Underwater Robotic Systems for Archaeology Benedetto Allotta benedetto.allotta@unifi.it DIEF - Dept. of Industrial Engineering Florence MDM Lab Laboratory of Mechatronics and Dynamic
Ultra-Short Baseline Acoustic Positioning System
 1 Ultra-Short Baseline Acoustic Positioning System Timothy Joel Soppet Computer Engineering Program California Polytechnic State University San Luis Obispo, CA tsoppet@calpoly.edu Abstract This paper explains
1 Ultra-Short Baseline Acoustic Positioning System Timothy Joel Soppet Computer Engineering Program California Polytechnic State University San Luis Obispo, CA tsoppet@calpoly.edu Abstract This paper explains
The International Student Offshore Design Competition (ISODC), sponsored by. Society of Mechanical Engineers (ASME), is a perfect opportunity for MIT
, sponsored by. Society of Mechanical Engineers (ASME), is a perfect opportunity for MIT") Introduction The International Student Offshore Design Competition (ISODC), sponsored by the Society of Naval Architects and Marine Engineers (SNAME) as well as the American Society of Mechanical Engineers
Introduction The International Student Offshore Design Competition (ISODC), sponsored by the Society of Naval Architects and Marine Engineers (SNAME) as well as the American Society of Mechanical Engineers
Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2014 Humanoid League
 Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2014 Humanoid League Chung-Hsien Kuo, Yu-Cheng Kuo, Yu-Ping Shen, Chen-Yun Kuo, Yi-Tseng Lin 1 Department of Electrical Egineering, National
Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2014 Humanoid League Chung-Hsien Kuo, Yu-Cheng Kuo, Yu-Ping Shen, Chen-Yun Kuo, Yi-Tseng Lin 1 Department of Electrical Egineering, National
WORLD ROBOT OLYMPIAD Advanced Robotics Challenge Game Description, Rules and Scoring SMART GREENHOUSE
 WORLD ROBOT OLYMPIAD 2019 Advanced Robotics Challenge Game Description, Rules and Scoring SMART GREENHOUSE Introduction Robotics is a wonderful platform for learning 21st century skills, solving robotic
WORLD ROBOT OLYMPIAD 2019 Advanced Robotics Challenge Game Description, Rules and Scoring SMART GREENHOUSE Introduction Robotics is a wonderful platform for learning 21st century skills, solving robotic
WF Wolves & Taura Bots Humanoid Kid Size Team Description for RoboCup 2016
 WF Wolves & Taura Bots Humanoid Kid Size Team Description for RoboCup 2016 Björn Anders 1, Frank Stiddien 1, Oliver Krebs 1, Reinhard Gerndt 1, Tobias Bolze 1, Tom Lorenz 1, Xiang Chen 1, Fabricio Tonetto
WF Wolves & Taura Bots Humanoid Kid Size Team Description for RoboCup 2016 Björn Anders 1, Frank Stiddien 1, Oliver Krebs 1, Reinhard Gerndt 1, Tobias Bolze 1, Tom Lorenz 1, Xiang Chen 1, Fabricio Tonetto
Pre-Proposal Presentation Team 1: Portable Micro-sensor Reader
 Pre-Proposal Presentation Team 1: Portable Micro-sensor Reader Sponsors: - MSU Technologies Dr. Shantanu Chakrabartty - National Science Foundation Facilitator: Dr. Fathi Salem Team Members: Ron Razalan,
Pre-Proposal Presentation Team 1: Portable Micro-sensor Reader Sponsors: - MSU Technologies Dr. Shantanu Chakrabartty - National Science Foundation Facilitator: Dr. Fathi Salem Team Members: Ron Razalan,
UNDERWATER CURRENT CONNECTOR
 HOWARD UNIVERSITY SENIOR DESIGN PROJECT UNDERWATER CURRENT CONNECTOR Team Members: Crepin Mahop (Senior EE) De Shawnn L. Woods II (Senior EE) Kerri Chambers (Senior EE) Joshua Ajayi (Senior CE) Team Support:
HOWARD UNIVERSITY SENIOR DESIGN PROJECT UNDERWATER CURRENT CONNECTOR Team Members: Crepin Mahop (Senior EE) De Shawnn L. Woods II (Senior EE) Kerri Chambers (Senior EE) Joshua Ajayi (Senior CE) Team Support:
FalconBots RoboCup Humanoid Kid -Size 2014 Team Description Paper. Minero, V., Juárez, J.C., Arenas, D. U., Quiroz, J., Flores, J.A.
 FalconBots RoboCup Humanoid Kid -Size 2014 Team Description Paper Minero, V., Juárez, J.C., Arenas, D. U., Quiroz, J., Flores, J.A. Robotics Application Workshop, Instituto Tecnológico Superior de San
FalconBots RoboCup Humanoid Kid -Size 2014 Team Description Paper Minero, V., Juárez, J.C., Arenas, D. U., Quiroz, J., Flores, J.A. Robotics Application Workshop, Instituto Tecnológico Superior de San
GUIDELINES FOR DESIGN LOW COST MICROMECHANICS. L. Ruiz-Huerta, A. Caballero Ruiz, E. Kussul
 GUIDELINES FOR DESIGN LOW COST MICROMECHANICS L. Ruiz-Huerta, A. Caballero Ruiz, E. Kussul Center of Applied Sciences and Technological Development, UNAM Laboratory of Mechatronics and Micromechanics,
GUIDELINES FOR DESIGN LOW COST MICROMECHANICS L. Ruiz-Huerta, A. Caballero Ruiz, E. Kussul Center of Applied Sciences and Technological Development, UNAM Laboratory of Mechatronics and Micromechanics,
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
Programming Arduino Next Steps: Going Further With Sketches PDF
 Programming Arduino Next Steps: Going Further With Sketches PDF Take your Arduino skills to the next level! In this practical guide, electronics guru Simon Monk takes you under the hood of Arduino and
Programming Arduino Next Steps: Going Further With Sketches PDF Take your Arduino skills to the next level! In this practical guide, electronics guru Simon Monk takes you under the hood of Arduino and
GLOBAL IT COMMUNE (GIC) AND SAI BALAJI EDUCATION SOCIEITY (SBES)
 AND SAI BALAJI EDUCATION SOCIEITY (SBES)") GLOBAL IT COMMUNE (GIC) AND SAI BALAJI EDUCATION SOCIEITY (SBES) PRESENTS Two day workshop On ADVANCED INTERNET OF THINGS (IOT) Venue: July28th and July 29 th 2018, MDP Room /Computer Lab Room IIMS Pune
GLOBAL IT COMMUNE (GIC) AND SAI BALAJI EDUCATION SOCIEITY (SBES) PRESENTS Two day workshop On ADVANCED INTERNET OF THINGS (IOT) Venue: July28th and July 29 th 2018, MDP Room /Computer Lab Room IIMS Pune
2014 MATE International ROV Competition Award Prizes & Sponsors CATEGORY DESCRIPTION PRIZE
 2014 MATE International ROV Competition Award Prizes & Sponsors CATEGORY DESCRIPTION PRIZE Overall winners o 1 st Based on overall, total score EXPLORER One-year memberships in the Marine Technology Society
2014 MATE International ROV Competition Award Prizes & Sponsors CATEGORY DESCRIPTION PRIZE Overall winners o 1 st Based on overall, total score EXPLORER One-year memberships in the Marine Technology Society
CEEN Bot Lab Design A SENIOR THESIS PROPOSAL
 CEEN Bot Lab Design by Deborah Duran (EENG) Kenneth Townsend (EENG) A SENIOR THESIS PROPOSAL Presented to the Faculty of The Computer and Electronics Engineering Department In Partial Fulfillment of Requirements
CEEN Bot Lab Design by Deborah Duran (EENG) Kenneth Townsend (EENG) A SENIOR THESIS PROPOSAL Presented to the Faculty of The Computer and Electronics Engineering Department In Partial Fulfillment of Requirements
Building the Final Bot, Programming the Prototype! - B U I L D -
 ~ W E E K 4 ~ Building the Final Bot, Programming the Prototype! - B U I L D - This week we worked on the gear box for the elevator of the final robot. The prototype currently has a gear ratio that lacks
~ W E E K 4 ~ Building the Final Bot, Programming the Prototype! - B U I L D - This week we worked on the gear box for the elevator of the final robot. The prototype currently has a gear ratio that lacks
Robo-Erectus Tr-2010 TeenSize Team Description Paper.
 Robo-Erectus Tr-2010 TeenSize Team Description Paper. Buck Sin Ng, Carlos A. Acosta Calderon, Nguyen The Loan, Guohua Yu, Chin Hock Tey, Pik Kong Yue and Changjiu Zhou. Advanced Robotics and Intelligent
Robo-Erectus Tr-2010 TeenSize Team Description Paper. Buck Sin Ng, Carlos A. Acosta Calderon, Nguyen The Loan, Guohua Yu, Chin Hock Tey, Pik Kong Yue and Changjiu Zhou. Advanced Robotics and Intelligent
ILR #1: Sensors and Motor Control Lab. Zihao (Theo) Zhang- Team A October 14, 2016 Teammates: Amit Agarwal, Harry Golash, Yihao Qian, Menghan Zhang
 Zhang- Team A October 14, 2016 Teammates: Amit Agarwal, Harry Golash, Yihao Qian, Menghan Zhang") ILR #1: Sensors and Motor Control Lab Zihao (Theo) Zhang- Team A October 14, 2016 Teammates: Amit Agarwal, Harry Golash, Yihao Qian, Menghan Zhang Individual Progress For my team s sensors and motor control
ILR #1: Sensors and Motor Control Lab Zihao (Theo) Zhang- Team A October 14, 2016 Teammates: Amit Agarwal, Harry Golash, Yihao Qian, Menghan Zhang Individual Progress For my team s sensors and motor control
SAUC-E 2010 Journal Paper ENSIETA
 SAUC-E 2010 Journal Paper ENSIETA Fabrice LE BARS, Jan SLIWKA, Luc JAULIN et al. SAUC-E 2010 Journal Paper ENSIETA 2 CONTENT I. EXECUTIVE SUMMARY... 3 II. INTRODUCTION... 4 III. PHYSICAL DESCRIPTION...
SAUC-E 2010 Journal Paper ENSIETA Fabrice LE BARS, Jan SLIWKA, Luc JAULIN et al. SAUC-E 2010 Journal Paper ENSIETA 2 CONTENT I. EXECUTIVE SUMMARY... 3 II. INTRODUCTION... 4 III. PHYSICAL DESCRIPTION...
ROMEO Humanoid for Action and Communication. Rodolphe GELIN Aldebaran Robotics
 ROMEO Humanoid for Action and Communication Rodolphe GELIN Aldebaran Robotics 7 th workshop on Humanoid November Soccer 2012 Robots Osaka, November 2012 Overview French National Project labeled by Cluster
ROMEO Humanoid for Action and Communication Rodolphe GELIN Aldebaran Robotics 7 th workshop on Humanoid November Soccer 2012 Robots Osaka, November 2012 Overview French National Project labeled by Cluster
Dr. Ashish Dutta. Professor, Dept. of Mechanical Engineering Indian Institute of Technology Kanpur, INDIA
 Introduction: History of Robotics - past, present and future Dr. Ashish Dutta Professor, Dept. of Mechanical Engineering Indian Institute of Technology Kanpur, INDIA Origin of Automation: replacing human
Introduction: History of Robotics - past, present and future Dr. Ashish Dutta Professor, Dept. of Mechanical Engineering Indian Institute of Technology Kanpur, INDIA Origin of Automation: replacing human
COURSE MODULES LEVEL 3.1 & 3.2
 COURSE MODULES LEVEL 3.1 & 3.2 6-Month Internship The six-month internship provides students with the opportunity to apply the knowledge acquired in the classroom to work situations, and demonstrate problem
COURSE MODULES LEVEL 3.1 & 3.2 6-Month Internship The six-month internship provides students with the opportunity to apply the knowledge acquired in the classroom to work situations, and demonstrate problem
TurtleBot2&ROS - Learning TB2
 TurtleBot2&ROS - Learning TB2 Ing. Zdeněk Materna Department of Computer Graphics and Multimedia Fakulta informačních technologií VUT v Brně TurtleBot2&ROS - Learning TB2 1 / 22 Presentation outline Introduction
TurtleBot2&ROS - Learning TB2 Ing. Zdeněk Materna Department of Computer Graphics and Multimedia Fakulta informačních technologií VUT v Brně TurtleBot2&ROS - Learning TB2 1 / 22 Presentation outline Introduction
Distributed Vision System: A Perceptual Information Infrastructure for Robot Navigation
 Distributed Vision System: A Perceptual Information Infrastructure for Robot Navigation Hiroshi Ishiguro Department of Information Science, Kyoto University Sakyo-ku, Kyoto 606-01, Japan E-mail: ishiguro@kuis.kyoto-u.ac.jp
Distributed Vision System: A Perceptual Information Infrastructure for Robot Navigation Hiroshi Ishiguro Department of Information Science, Kyoto University Sakyo-ku, Kyoto 606-01, Japan E-mail: ishiguro@kuis.kyoto-u.ac.jp
Randomized Motion Planning for Groups of Nonholonomic Robots
 Randomized Motion Planning for Groups of Nonholonomic Robots Christopher M Clark chrisc@sun-valleystanfordedu Stephen Rock rock@sun-valleystanfordedu Department of Aeronautics & Astronautics Stanford University
Randomized Motion Planning for Groups of Nonholonomic Robots Christopher M Clark chrisc@sun-valleystanfordedu Stephen Rock rock@sun-valleystanfordedu Department of Aeronautics & Astronautics Stanford University
Arduino Workshop A Hands On Introduction With 65 Projects John Boxall
 Arduino Workshop A Hands On Introduction With 65 Projects John Boxall We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks online or by storing it on
Arduino Workshop A Hands On Introduction With 65 Projects John Boxall We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks online or by storing it on
Nautical Autonomous System with Task Integration (Code name)
") Nautical Autonomous System with Task Integration (Code name) NASTI 10/6/11 Team NASTI: Senior Students: Terry Max Christy, Jeremy Borgman Advisors: Nick Schmidt, Dr. Gary Dempsey Introduction The Nautical
Nautical Autonomous System with Task Integration (Code name) NASTI 10/6/11 Team NASTI: Senior Students: Terry Max Christy, Jeremy Borgman Advisors: Nick Schmidt, Dr. Gary Dempsey Introduction The Nautical
Field Rangers Team Description Paper
 Field Rangers Team Description Paper Yusuf Pranggonoh, Buck Sin Ng, Tianwu Yang, Ai Ling Kwong, Pik Kong Yue, Changjiu Zhou Advanced Robotics and Intelligent Control Centre (ARICC), Singapore Polytechnic,
Field Rangers Team Description Paper Yusuf Pranggonoh, Buck Sin Ng, Tianwu Yang, Ai Ling Kwong, Pik Kong Yue, Changjiu Zhou Advanced Robotics and Intelligent Control Centre (ARICC), Singapore Polytechnic,
The Future of AI A Robotics Perspective
 The Future of AI A Robotics Perspective Wolfram Burgard Autonomous Intelligent Systems Department of Computer Science University of Freiburg Germany The Future of AI My Robotics Perspective Wolfram Burgard
The Future of AI A Robotics Perspective Wolfram Burgard Autonomous Intelligent Systems Department of Computer Science University of Freiburg Germany The Future of AI My Robotics Perspective Wolfram Burgard
Smart Ocean Wave Energy Converter ECE 1616A
 Smart Ocean Wave Energy Converter ECE 1616A Nana Ahiabli, Andrew Budd, John Jacquinet Faculty Advisor: Peng Zhang Graduate Advisor: Taofeek Orekan Overview Recap Generator Improvements 3-Coil system Mechanical
Smart Ocean Wave Energy Converter ECE 1616A Nana Ahiabli, Andrew Budd, John Jacquinet Faculty Advisor: Peng Zhang Graduate Advisor: Taofeek Orekan Overview Recap Generator Improvements 3-Coil system Mechanical
Development of a Cost-Effective Underwater Robotic Platform for Operating both AUV and ROV Mode
 Mir ABM Jakir Hossain al. International Journal of Recent Research Aspects ISSN: 2349-7688, Vol. 2, Development of a Cost-Effective Underwater Robotic Platform for Operating both AUV and ROV Mode Mir ABM
Mir ABM Jakir Hossain al. International Journal of Recent Research Aspects ISSN: 2349-7688, Vol. 2, Development of a Cost-Effective Underwater Robotic Platform for Operating both AUV and ROV Mode Mir ABM
EIS - Electronics Instrumentation Systems for Marine Applications
 Coordinating unit: Teaching unit: Academic year: Degree: ECTS credits: 2015 230 - ETSETB - Barcelona School of Telecommunications Engineering 710 - EEL - Department of Electronic Engineering MASTER'S DEGREE
Coordinating unit: Teaching unit: Academic year: Degree: ECTS credits: 2015 230 - ETSETB - Barcelona School of Telecommunications Engineering 710 - EEL - Department of Electronic Engineering MASTER'S DEGREE
Arduino Platform Capabilities in Multitasking. environment.
 7 th International Scientific Conference Technics and Informatics in Education Faculty of Technical Sciences, Čačak, Serbia, 25-27 th May 2018 Session 3: Engineering Education and Practice UDC: 004.42
7 th International Scientific Conference Technics and Informatics in Education Faculty of Technical Sciences, Čačak, Serbia, 25-27 th May 2018 Session 3: Engineering Education and Practice UDC: 004.42
Senior Design I. Fast Acquisition and Real-time Tracking Vehicle. University of Central Florida
 Senior Design I Fast Acquisition and Real-time Tracking Vehicle University of Central Florida College of Engineering Department of Electrical Engineering Inventors: Seth Rhodes Undergraduate B.S.E.E. Houman
Senior Design I Fast Acquisition and Real-time Tracking Vehicle University of Central Florida College of Engineering Department of Electrical Engineering Inventors: Seth Rhodes Undergraduate B.S.E.E. Houman
Robotics Games for STEM Education
 Robotics Games for STEM Education Ravi Shankar, Center for Systems Integration, College of Engineering and Computer Science, Florida Atlantic University, Boca Campus, Boca Raton, FL Don Ploger, College
Robotics Games for STEM Education Ravi Shankar, Center for Systems Integration, College of Engineering and Computer Science, Florida Atlantic University, Boca Campus, Boca Raton, FL Don Ploger, College
2011 Capital Markets Day
 2011 Capital Markets Day Geir Håøy President Kongsberg Maritime WORLD CLASS through people, technology and dedication Kongsberg Maritime Introduction Significant market position within the drilling segment
2011 Capital Markets Day Geir Håøy President Kongsberg Maritime WORLD CLASS through people, technology and dedication Kongsberg Maritime Introduction Significant market position within the drilling segment
Engineering Project Proposals
 Engineering Project Proposals (Wireless sensor networks) Group members Hamdi Roumani Douglas Stamp Patrick Tayao Tyson J Hamilton (cs233017) (cs233199) (cs232039) (cs231144) Contact Information Email:
Engineering Project Proposals (Wireless sensor networks) Group members Hamdi Roumani Douglas Stamp Patrick Tayao Tyson J Hamilton (cs233017) (cs233199) (cs232039) (cs231144) Contact Information Email:
MINE SEARCH MISSION PLANNING FOR HIGH DEFINITION SONAR SYSTEM - SELECTION OF SPACE IMAGING EQUIPMENT FOR A SMALL AUV DOROTA ŁUKASZEWICZ, LECH ROWIŃSKI
 MINE SEARCH MISSION PLANNING FOR HIGH DEFINITION SONAR SYSTEM - SELECTION OF SPACE IMAGING EQUIPMENT FOR A SMALL AUV DOROTA ŁUKASZEWICZ, LECH ROWIŃSKI Gdansk University of Technology Faculty of Ocean Engineering
MINE SEARCH MISSION PLANNING FOR HIGH DEFINITION SONAR SYSTEM - SELECTION OF SPACE IMAGING EQUIPMENT FOR A SMALL AUV DOROTA ŁUKASZEWICZ, LECH ROWIŃSKI Gdansk University of Technology Faculty of Ocean Engineering
Riza Muhida. Presented at he 22nd Session of the Asia Pacific Regional Space Agency Forum (APRSAF 22), Bali, Indonesia, December 1 4, 2015
, Bali, Indonesia, December 1 4, 2015") Riza Muhida Presented at he 22nd Session of the Asia Pacific Regional Space Agency Forum (APRSAF 22), Bali, Indonesia, December 1 4, 2015 1 Presentation Outline Abstract Background Objective Project Scope
Riza Muhida Presented at he 22nd Session of the Asia Pacific Regional Space Agency Forum (APRSAF 22), Bali, Indonesia, December 1 4, 2015 1 Presentation Outline Abstract Background Objective Project Scope
Team Kanaloa: research initiatives and the Vertically Integrated Project (VIP) development paradigm
 development paradigm") Additive Manufacturing Renewable Energy and Energy Storage Astronomical Instruments and Precision Engineering Team Kanaloa: research initiatives and the Vertically Integrated Project (VIP) development
Additive Manufacturing Renewable Energy and Energy Storage Astronomical Instruments and Precision Engineering Team Kanaloa: research initiatives and the Vertically Integrated Project (VIP) development
Automation in Autoconer Section of the Spinning Mill
 Automation in Autoconer Section of the Spinning Mill Sundareshan M 1, Dinesh Kumar M 2 Vinoth S 3, Vivekanandhan P 4,Mugesh S 5,Subramani T 6, Sundar Ganesh C S 7 U.G. Student, Department of Robotics and
Automation in Autoconer Section of the Spinning Mill Sundareshan M 1, Dinesh Kumar M 2 Vinoth S 3, Vivekanandhan P 4,Mugesh S 5,Subramani T 6, Sundar Ganesh C S 7 U.G. Student, Department of Robotics and
IOT Question Bank. Unit 1. Chapter 1
 IOT Question Bank Unit 1 Chapter 1 THE INTERNET OF THINGS: AN OVERVIEW 1) What are the flavours of the Internet of Things? 2) Write an equation of the Internet of Things. And explain the purpose of IOT.
IOT Question Bank Unit 1 Chapter 1 THE INTERNET OF THINGS: AN OVERVIEW 1) What are the flavours of the Internet of Things? 2) Write an equation of the Internet of Things. And explain the purpose of IOT.
Presented at The 1st Space Exploration and Kibo Utilization for Asia Workshop Thursday, 28 May 2015, LAPAN Headquarters, Jakarta, Indonesia 1
 Riza Muhida Presented at The 1st Space Exploration and Kibo Utilization for Asia Workshop Thursday, 28 May 2015, LAPAN Headquarters, Jakarta, Indonesia 1 Presentation Outline Abstract Background Objective
Riza Muhida Presented at The 1st Space Exploration and Kibo Utilization for Asia Workshop Thursday, 28 May 2015, LAPAN Headquarters, Jakarta, Indonesia 1 Presentation Outline Abstract Background Objective
Hopper Spacecraft Simulator. Billy Hau and Brian Wisniewski
 Hopper Spacecraft Simulator Billy Hau and Brian Wisniewski Agenda Introduction Flight Dynamics Hardware Design Avionics Control System Future Works Introduction Mission Overview Collaboration with Penn
Hopper Spacecraft Simulator Billy Hau and Brian Wisniewski Agenda Introduction Flight Dynamics Hardware Design Avionics Control System Future Works Introduction Mission Overview Collaboration with Penn
An IoT Based Real-Time Environmental Monitoring System Using Arduino and Cloud Service
 Engineering, Technology & Applied Science Research Vol. 8, No. 4, 2018, 3238-3242 3238 An IoT Based Real-Time Environmental Monitoring System Using Arduino and Cloud Service Saima Zafar Emerging Sciences,
Engineering, Technology & Applied Science Research Vol. 8, No. 4, 2018, 3238-3242 3238 An IoT Based Real-Time Environmental Monitoring System Using Arduino and Cloud Service Saima Zafar Emerging Sciences,
MarineSIM : Robot Simulation for Marine Environments
 MarineSIM : Robot Simulation for Marine Environments P.G.C.Namal Senarathne, Wijerupage Sardha Wijesoma,KwangWeeLee, Bharath Kalyan, Moratuwage M.D.P, Nicholas M. Patrikalakis, Franz S. Hover School of
MarineSIM : Robot Simulation for Marine Environments P.G.C.Namal Senarathne, Wijerupage Sardha Wijesoma,KwangWeeLee, Bharath Kalyan, Moratuwage M.D.P, Nicholas M. Patrikalakis, Franz S. Hover School of
Engineering & Management
 International Conference on Advances in Sciences, Engineering & Management Contact Person Name: Conference Coordinator Contact No: +91 9566100720 Email: info@ifiad.in ICASEM-2016 Venue: Hotel Shree Panchratna
International Conference on Advances in Sciences, Engineering & Management Contact Person Name: Conference Coordinator Contact No: +91 9566100720 Email: info@ifiad.in ICASEM-2016 Venue: Hotel Shree Panchratna
Multi-Vehicles Formation Control Exploring a Scalar Field
 Multi-Vehicles Formation Control Exploring a Scalar Field Polytechnic University Department of Mechanical, Aerospace, and Manufacturing Engineering Polytechnic University,6 Metrotech,, Brooklyn, NY 11201
Multi-Vehicles Formation Control Exploring a Scalar Field Polytechnic University Department of Mechanical, Aerospace, and Manufacturing Engineering Polytechnic University,6 Metrotech,, Brooklyn, NY 11201
OpenROV Underwater Acoustic Location System Final Report
 OpenROV Underwater Acoustic Location System Final Report by Luis Sanchez, James Smith, Jason Shen in conjunction with Jim Trezzo 1. Abstract OpenROV is an underwater robotic platform developed to lower
OpenROV Underwater Acoustic Location System Final Report by Luis Sanchez, James Smith, Jason Shen in conjunction with Jim Trezzo 1. Abstract OpenROV is an underwater robotic platform developed to lower
TORSTEIN PEDERSEN. Improving the Common DVL: A New Standard in Doppler Velocity Logs
 TORSTEIN PEDERSEN Improving the Common DVL: A New Standard in Doppler Velocity Logs VOLVO OCEAN RACE 2011 Precursor to Nortek s DVL story Nortek Background for DVLs Technology Company with expertise in
TORSTEIN PEDERSEN Improving the Common DVL: A New Standard in Doppler Velocity Logs VOLVO OCEAN RACE 2011 Precursor to Nortek s DVL story Nortek Background for DVLs Technology Company with expertise in
(ICCTET-2016) Engineering and Technology. 27 March 16. Submit your paper: Organized by: Venue: Best Western Ashoka Pune Date: th
 Engineering and Technology. 27 March 16. Submit your paper: Organized by: Venue: Best Western Ashoka Pune Date: th") International Conference on Current Trends in Engineering and Technology (ICCTET-2016) Contact Person Name: Conference Coordinator Contact No: +91 8428337726 Email: info@ietr.in Venue: Best Western Ashoka
International Conference on Current Trends in Engineering and Technology (ICCTET-2016) Contact Person Name: Conference Coordinator Contact No: +91 8428337726 Email: info@ietr.in Venue: Best Western Ashoka
Car Cavity Acoustics using ANSYS
 Car Cavity Acoustics using ANSYS Muthukrishnan A Assistant Consultant TATA Consultancy Services 185,Lloyds Road, Chennai- 600 086 INDIA Introduction The study of vehicle interior acoustics in the automotive
Car Cavity Acoustics using ANSYS Muthukrishnan A Assistant Consultant TATA Consultancy Services 185,Lloyds Road, Chennai- 600 086 INDIA Introduction The study of vehicle interior acoustics in the automotive
Ocean/Marine Engineering and Naval Architecture Research and Education Experience and Capacity at Canadian Universities
 Ocean/Marine Engineering and Naval Architecture Research and Education Experience and Capacity at Canadian Universities Wei Qiu, Memorial University Andrew Gerber, University of New Brunswick Jason Gu,
Ocean/Marine Engineering and Naval Architecture Research and Education Experience and Capacity at Canadian Universities Wei Qiu, Memorial University Andrew Gerber, University of New Brunswick Jason Gu,
A Division of Engtek Manoeuvra Systems Pte Ltd. SubSea Propulsion Technology
 Engtek SubSea Systems A Division of Engtek Manoeuvra Systems Pte Ltd SubSea Propulsion Technology SubSea Hydraulic Thruster Systems The enclosed data, information, description, photos and illustrations
Engtek SubSea Systems A Division of Engtek Manoeuvra Systems Pte Ltd SubSea Propulsion Technology SubSea Hydraulic Thruster Systems The enclosed data, information, description, photos and illustrations
Progress Report. Mohammadtaghi G. Poshtmashhadi. Supervisor: Professor António M. Pascoal
 Progress Report Mohammadtaghi G. Poshtmashhadi Supervisor: Professor António M. Pascoal OceaNet meeting presentation April 2017 2 Work program Main Research Topic Autonomous Marine Vehicle Control and
Progress Report Mohammadtaghi G. Poshtmashhadi Supervisor: Professor António M. Pascoal OceaNet meeting presentation April 2017 2 Work program Main Research Topic Autonomous Marine Vehicle Control and
Marine Debris Cleaner Phase 1 Navigation
 Southeastern Louisiana University Marine Debris Cleaner Phase 1 Navigation Submitted as partial fulfillment for the senior design project By Ryan Fabre & Brock Dickinson ET 494 Advisor: Dr. Ahmad Fayed
Southeastern Louisiana University Marine Debris Cleaner Phase 1 Navigation Submitted as partial fulfillment for the senior design project By Ryan Fabre & Brock Dickinson ET 494 Advisor: Dr. Ahmad Fayed
SmartSenseCom Introduces Next Generation Seismic Sensor Systems
 SmartSenseCom Introduces Next Generation Seismic Sensor Systems Summary: SmartSenseCom, Inc. (SSC) has introduced the next generation in seismic sensing technology. SSC s systems use a unique optical sensing
SmartSenseCom Introduces Next Generation Seismic Sensor Systems Summary: SmartSenseCom, Inc. (SSC) has introduced the next generation in seismic sensing technology. SSC s systems use a unique optical sensing
Undefined Obstacle Avoidance and Path Planning
 Paper ID #6116 Undefined Obstacle Avoidance and Path Planning Prof. Akram Hossain, Purdue University, Calumet (Tech) Akram Hossain is a professor in the department of Engineering Technology and director
Paper ID #6116 Undefined Obstacle Avoidance and Path Planning Prof. Akram Hossain, Purdue University, Calumet (Tech) Akram Hossain is a professor in the department of Engineering Technology and director
Pick and Place Robotic Arm Using Arduino
 Pick and Place Robotic Arm Using Arduino Harish K 1, Megha D 2, Shuklambari M 3, Amit K 4, Chaitanya K Jambotkar 5 1,2,3,4 5 th SEM Students in Department of Electrical and Electronics Engineering, KLE.I.T,
Pick and Place Robotic Arm Using Arduino Harish K 1, Megha D 2, Shuklambari M 3, Amit K 4, Chaitanya K Jambotkar 5 1,2,3,4 5 th SEM Students in Department of Electrical and Electronics Engineering, KLE.I.T,
Eelume: The Next Evolution in Underwater Robotics. Richard Mills Director of Sales Marine Robotics Kongsberg Maritime AS
 Eelume: The Next Evolution in Underwater Robotics Richard Mills Director of Sales Marine Robotics Kongsberg Maritime AS A brief history of Marine Robotics First controlled underwater vehicle developed
Eelume: The Next Evolution in Underwater Robotics Richard Mills Director of Sales Marine Robotics Kongsberg Maritime AS A brief history of Marine Robotics First controlled underwater vehicle developed
MathWorks Announces Built-in Simulink Support for Arduino, BeagleBoard, and LEGO MINDSTORMS NXT
 MathWorks Announces Built-in Simulink Support for Arduino, BeagleBoard, and LEGO MINDSTORMS NXT With one click, engineers run Simulink control system and signal processing algorithms in hardware http://www.mathworks.com/company/newsroom/mathworks-announces-built-in-simulink-
MathWorks Announces Built-in Simulink Support for Arduino, BeagleBoard, and LEGO MINDSTORMS NXT With one click, engineers run Simulink control system and signal processing algorithms in hardware http://www.mathworks.com/company/newsroom/mathworks-announces-built-in-simulink-
[Kathar*, 5(2): February, 2016] ISSN: (I2OR), Publication Impact Factor: 3.785
![[Kathar*, 5(2): February, 2016] ISSN: (I2OR), Publication Impact Factor: 3.785](/thumbs/95/124659799.jpg "[Kathar*, 5(2): February, 2016] ISSN: (I2OR), Publication Impact Factor: 3.785") IJESRT INTERNATIONAL JOURNAL OF ENGINEERING SCIENCES & RESEARCH TECHNOLOGY A REVIEW ON DRIVER DROWSINESS AND ALCOHOL DETECTION SYSTEM Mr. Pandurang N. Kathar *, Prof. D.L.Bhuyar, Prof. A.M.Rawate * M.E.
IJESRT INTERNATIONAL JOURNAL OF ENGINEERING SCIENCES & RESEARCH TECHNOLOGY A REVIEW ON DRIVER DROWSINESS AND ALCOHOL DETECTION SYSTEM Mr. Pandurang N. Kathar *, Prof. D.L.Bhuyar, Prof. A.M.Rawate * M.E.
COS Lecture 1 Autonomous Robot Navigation
 COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
Marine Sensor/Autonomous Underwater Vehicle Integration Project
 Marine Sensor/Autonomous Underwater Vehicle Integration Project Dr. Thomas L. Hopkins Department of Marine Science University of South Florida St. Petersburg, FL 33701-5016 phone: (727) 553-1501 fax: (727)
Marine Sensor/Autonomous Underwater Vehicle Integration Project Dr. Thomas L. Hopkins Department of Marine Science University of South Florida St. Petersburg, FL 33701-5016 phone: (727) 553-1501 fax: (727)
DelFly Versions. See Figs. A.1, A.2, A.3, A.4 and A.5.
 DelFly Versions A See Figs. A.1, A.2, A.3, A.4 and A.5. Springer Science+Bussiness Media Dordrecht 2016 G.C.H.E. de Croon et al., The DelFly, DOI 10.1007/978-94-017-9208-0 209 210 Appendix A: DelFly Versions
DelFly Versions A See Figs. A.1, A.2, A.3, A.4 and A.5. Springer Science+Bussiness Media Dordrecht 2016 G.C.H.E. de Croon et al., The DelFly, DOI 10.1007/978-94-017-9208-0 209 210 Appendix A: DelFly Versions
Android Phone Based Assistant System for Handicapped/Disabled/Aged People
 IJIRST International Journal for Innovative Research in Science & Technology Volume 3 Issue 10 March 2017 ISSN (online): 2349-6010 Android Phone Based Assistant System for Handicapped/Disabled/Aged People
IJIRST International Journal for Innovative Research in Science & Technology Volume 3 Issue 10 March 2017 ISSN (online): 2349-6010 Android Phone Based Assistant System for Handicapped/Disabled/Aged People